Изобретение относится к передатчику, как, впрочем, и приемнику и соответствующим способам для передачи сигналов или для синхронизации приемника посредством передатчика.
Во многих системах передачи данных пилот–последовательности (также упоминаются как обучающие последовательности или последовательности синхронизации) вставляются в потоки данных, которые должны быть переданы, для обнаружения сигнала или оценки параметра. Это может быть, как передачей непрерывного потока данных, при которой пилот–последовательности разбросаны через определенные интервалы, так и пакетно–ориентированной передачей, при которой каждый пакет (также упоминаемый как телеграмма) обычно содержит ровно одну пилот–последовательность. Пилот–последовательность также называется преамбулой или мидамбулой, если она располагается в начале или в середине пакета. Тем не менее пилот–последовательность также может быть распределена внутри пакета в форме двух или более подпоследовательностей.
В некоторых основанных на радиосвязи системах с асинхронной передачей пакетов, паузы передачи значительно длиннее соответствующей продолжительности пакета. Некоторые системы используют разбиение телеграммы (см. [4] и [1], DE 10 2011 082 098 A1), при котором каждый пакет делится на число подпакетов – упоминаемых как фрагменты или фрагменты телеграммы. Как правило каждый фрагмент таким образом содержит свою собственную пилот–последовательность. Разбиение телеграммы оказывается особенно надежным в системах с ограниченными помехами, в которых большое число передатчиков передает некоординированные телеграммы, которые должны быть приняты и декодированы одним единственным приемником. Это происходит, например, в телеметрических системах, сенсорных сетях или приложения под ключевым словом Интернет Вещей (IoT).
Демодуляция данных у основанных на радиосвязи систем передачи данных требует синхронизации приемника, состоящей из:
– Временной синхронизации: оценка точной временной позиции пакета, как, впрочем, и оптимального времени выборки.
– Частотной синхронизации: оценка и коррекция ухода частоты между генераторами колебаний передачи и приема, таким образом, разности частот между частотой несущей сигнала передачи и центральной частотой фильтра приема.
– Фазовой синхронизации: оценка фазы после того, как имело место коррекция частоты (требуется только для когерентной демодуляции).
При асинхронной передаче пакетов эти три типа синхронизации должны выполняться до демодуляции для каждого пакета, независимо от пакетов, принятых ранее. С этой целью каждый пакет содержит пилот–последовательность, посредством которой может быть осуществлено первоначальное получение. В дополнение во время демодуляции данных может потребоваться отслеживание параметров. В нижеследующем рассматривается проблема первоначального получения.
Разбиение телеграммы дает преимущество в том, что, в частности, системы с большим числом некоординированных передатчиков являются надежными в отношении конфликтов пакетов. Тем не менее для разбиения телеграммы неизвестны подходы в области синхронизации и, в частности, частотной синхронизации, которые дают удовлетворительные результаты.
Цель изобретения состоит в том, чтобы предложить передатчик и приемник, которые в частности используют разбиение, и которые являются улучшенными по сравнению с предшествующим уровнем техники исходя из синхронизации.
Изобретение достигает цели посредством передатчика.
Передатчик выполнен с возможностью передачи по меньшей мере одного сигнала с пилот–последовательностью или пилот–подпоследовательностью, содержащей несколько пилот–символов. Передатчик содержит генератор сигнала, который обеспечивает пилот–последовательность или пилот–подпоследовательность.
В одной конфигурации предусматривается, что передатчик выполнен с возможностью передачи по меньшей мере одного сигнала с пилот–последовательностью, содержащей множество пилот–символов. Генератор сигнала обеспечивает пилот–последовательность так, что пилот–последовательность включает в себя по меньшей мере две группы символов, причем каждая с по меньшей мере двумя пилот–символами. Таким образом, при оценке сигнала, принятого приемником в результате передачи сигнала, группы символов формируют фазовые ошибки, которые зависят от временного смещения между опорным моментом времени передачи сигнала передатчиком и значением, которое предполагается и/или оценивается при оценке для опорного момента времени, и которые по существу взаимно компенсируют друг друга по группам символов во время оценки.
Одна конфигурация состоит в том, группы символов частично перекрываются. В данной конфигурации, например, по меньшей мере один символ принадлежит двум группам символов.
В одной конфигурации предусматривается, что по меньшей мере одна группа символов состоит из среднего символа и двух фланговых символов. В одной конфигурации средний символ таким образом является символом, который оценивается относительно фазы.
Одна конфигурация состоит в том, что передатчик выполнен с возможностью передачи сигналов по меньшей мере с одной пилот–последовательностью, содержащей по меньшей мере четыре пилот–символа.
В одной конфигурации предусматривается, что передатчик передает сигналы, содержащие пилот–последовательности, полученные в результате модуляции MSK. Модуляция MSK вследствие этого является примером модуляции для формирования пилот–символов сигналов, которые должны быть переданы. В качестве альтернативы, это модуляция GMSK.
Одна конфигурация состоит в том, что передатчик выводит данные, которые должны быть выведены посредством по меньшей мере двух фрагментов телеграммы, которые передатчик передает как отдельные сигналы и которые короче единой телеграммы, содержащей все данные, и что по меньшей мере один фрагмент телеграммы содержит пилот–последовательность, сформированную генератором сигнала или пилот–подпоследовательность, ассоциированную с пилот–последовательностью. Вследствие этого в данной конфигурации используется разбиение телеграммы. Одна особенность разбиения телеграммы состоит в том, что синхронизация с фрагментом телеграммы обычно невозможна (например, с низким SNR или с помехами в канале).
В одной конфигурации предусматривается, что генератор сигнала обеспечивает пилот–последовательность с длиной по меньшей мере в восемь пилот–символов так, что пилот–последовательность имеет одну из следующих форм:
[0, 1, 0, 0, 0, 0, 1, 0],
[1, 0, 1, 1, 1, 1, 0, 1],
[0, 0, 0, 1, 0, 1, 1, 1] или
[1, 1, 1, 0, 1, 0, 0, 0].
Нули и единицы являются битами пилот–последовательности до модуляции, таким образом, до отображения, из которого получаются фактические пилот–символы. Примером отображения является отображение MSK, которое будет описано в дальнейшем (см. Фиг. 11).
Одна конфигурация состоит в том, что генератор сигнала обеспечивает пилот–последовательность с длиной по меньшей мере в восемь пилот–символов так, что участок пилот–последовательности, который является однократной или многократной частью пилот–последовательности, имеет одну из следующих форм:
[0, 1, 0, 0, 0, 0, 1, 0],
[1, 0, 1, 1, 1, 1, 0, 1],
[0, 0, 0, 1, 0, 1, 1, 1] или
[1, 1, 1, 0, 1, 0, 0, 0].
Нули и единицы являются битами пилот–последовательности до модуляции, из которой получаются фактические пилот–символы. Примером отображения является отображение MSK, которое будет описано в дальнейшем (см. Фиг. 11).
В одной конфигурации предусматривается, что генератор сигнала обеспечивает пилот–последовательность с длиной по меньшей мере в двенадцать пилот–символов так, что пилот–последовательность имеет одну из следующих форм:
[0, 0, 0, 0, 0, 1, 1, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 1, 0, 0, 1, 1, 1, 1],
[0, 0, 0, 1, 0, 1, 1, 1, 1, 0, 1, 1],
[0, 0, 0, 1, 1, 0, 1, 0, 1, 1, 1, 1],
[0, 1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0],
[0, 1, 0, 0, 1, 1, 1, 1, 1, 0, 1, 0],
[0, 1, 0, 1, 0, 0, 1, 1, 1, 1, 1, 0],
[0, 1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0],
[0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0],
[0, 1, 1, 1, 1, 0, 1, 0, 0, 0, 1, 0],
[1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 0, 0, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 0, 1, 1, 0, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 0, 0, 0, 0, 0, 1, 0, 1],
[1, 0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0, 1],
[1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 0, 1, 0, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 1, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0],
[1, 1, 1, 1, 1, 0, 0, 1, 0, 1, 0, 0] или
[1, 1, 1, 1, 1, 0, 1, 0, 1, 1, 0, 0].
Нули и единицы являются битами пилот–последовательности до модуляции. Примером отображения является отображение MSK, которое будет описано в дальнейшем (см. Фиг. 11).
Одна конфигурация состоит в том, что генератор сигнала обеспечивает пилот–последовательность с длиной по меньшей мере в двенадцать пилот–символов так, что участок пилот–последовательности, который является однократной или многократной частью пилот–последовательности, имеет одну из следующих форм:
[0, 0, 0, 0, 0, 1, 1, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 1, 0, 0, 1, 1, 1, 1],
[0, 0, 0, 1, 0, 1, 1, 1, 1, 0, 1, 1],
[0, 0, 0, 1, 1, 0, 1, 0, 1, 1, 1, 1],
[0, 1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0],
[0, 1, 0, 0, 1, 1, 1, 1, 1, 0, 1, 0],
[0, 1, 0, 1, 0, 0, 1, 1, 1, 1, 1, 0],
[0, 1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0],
[0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0],
[0, 1, 1, 1, 1, 0, 1, 0, 0, 0, 1, 0],
[1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 0, 0, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 0, 1, 1, 0, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 0, 0, 0, 0, 0, 1, 0, 1],
[1, 0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0, 1],
[1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 0, 1, 0, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 1, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0],
[1, 1, 1, 1, 1, 0, 0, 1, 0, 1, 0, 0] или
[1, 1, 1, 1, 1, 0, 1, 0, 1, 1, 0, 0].
Каждое из нулей и единиц является битами пилот–последовательности до модуляции, таким образом, до отображения. Примером отображения является отображение MSK, которое будет описано в дальнейшем (см. Фиг. 11).
Передатчик таким образом использует пилот–последовательности для улучшенной оценки фазы – даже фрагментированной, например, – когда возникают временные смещения.
Определяется фаза между передатчиком (или частотой передатчика) и приемником (или частотой приемника). На эту фазу влияет временное смещенное, которое получается из опорного момента времени передачи сигнала и значения, которое предполагается или оценивается во время оценки. Например, опорный момент времени является временем, в которое передан сигнал или пилот–символ пилот–последовательности сигнала. Если неправильное значение (опорный момент времени) предполагается или оценивается во время оценки пилот–последовательности, то это оказывает непосредственное влияние на определение фазы. Вследствие этого передатчик передает сигналы с пилот–последовательностями, символы которой, когда происходит временное смещение, формируют такие фазовые ошибки – как ошибки при определении фазы – которые по существу компенсируются в среднем по значениям фазы, определенным из расчета на символ.
Кроме того, изобретение достигает цели посредством способа для передачи сигналов.
Способ содержит по меньшей мере следующие этапы:
Каждый из сигналов передается с пилот–последовательностью, содержащей несколько символов пилот–последовательности.
Пилот–последовательности обеспечиваются так, что каждая из пилот–последовательностей содержит по меньшей мере две группы символов, причем каждая с по меньшей мере двумя пилот–символами. Таким образом, при оценке сигнала, принятого приемником в результате передачи сигнала, группы символов формируют фазовые ошибки, которые зависят от временного смещения между опорным моментом времени передачи сигнала передатчиком и значением, которое предполагается и/или оценивается при оценке для опорного момента времени, и которые по существу взаимно компенсируют друг друга во время оценки по группам символов.
Вышеупомянутая конфигурация передатчика может быть реализована посредством этапов соответствующих конфигураций способа так, что нет необходимости повторять здесь варианты осуществления.
Нижеследующие конфигурации относятся к тому факту, что передатчик передает несколько сигналов, причем каждый с пилот–подпоследовательностью. Для того чтобы определить фазу между передатчиком и приемником отдельные значения фазы определяются для каждого отдельного сигнала и затем отдельные значения фазы усредняются по сигналам. По этой причине фазовые ошибки, например, не компенсируют друг друга в сигнале, а только при оценке (предпочтительно всех) принятых сигналов. Вследствие этого сигналы являются, например, фрагментами телеграммы в форме, которая не имеет полной пилот–последовательности, а только пилот–подпоследовательности, которые дополняют друг друга, чтобы формировать полную пилот–последовательность. Предпочтительно может быть применена оценка только по нескольким пилот–подпоследовательностях, если отдельные пилот–подпоследовательности были переданы когерентным образом и могут по–прежнему быть приняты когерентным образом на приемнике.
Вследствие этого, в соответствии с дополнительной или альтернативной конфигурацией, изобретение относится к передатчику, который выполнен с возможностью передачи по меньшей мере двух сигналов, причем каждый с пилот–подпоследовательностью, содержащей несколько пилот–символов. Генератор сигнала обеспечивает пилот–подпоследовательности сигналов так, что каждая из пилот–последовательностей имеет по меньшей мере одну группу символов с по меньшей мере двумя пилот–символами, при этом группы символов сигналов формируют фазовые ошибки, которые зависят от временного смещения между опорным моментом времени передачи сигнала передатчиком и значением, которое предполагается и/или оценивается при оценке для опорного момента времени, и которые по существу взаимно компенсируют друг друга во время оценки по сигналам.
В противоположность предыдущим конфигурациям фазовые ошибки в данной конфигурации таким образом компенсируют друг друга при оценке по нескольким сигналам.
В соответствии с одной конфигурацией по меньшей мере одна пилот–подпоследовательность имеет по меньшей мере две группы символов, причем группы символов частично перекрываются.
Одна конфигурация предусматривает, что по меньшей мере одна группа символов состоит из среднего символа и двух фланговых символов.
В соответствии с конфигурацией передатчик передает сигналы, которые имеют пилот–подпоследовательности, полученные в результате модуляции MSK.
Одна конфигурация предусматривает, что генератор сигнала обеспечивает пилот–подпоследовательность так, что пилот–подпоследовательности вместе содержат участок, который присутствует в однократной или многократной форме и имеет следующие формы:
[0, 1, 0, 0, 0, 0, 1, 0],
[1, 0, 1, 1, 1, 1, 0, 1],
[0, 0, 0, 1, 0, 1, 1, 1] или
[1, 1, 1, 0, 1, 0, 0, 0].
Каждое из нулей и единиц является битами пилот–последовательности до модуляции. Примером отображения является отображение MSK, которое будет описано в дальнейшем (см. Фиг. 11).
В соответствии с конфигурацией генератор сигнала обеспечивает пилот–подпоследовательности так, что пилот–подпоследовательности вместе имеют участок, который присутствует в однократной или многократной форме и имеет следующие формы:
[0, 0, 0, 0, 0, 1, 1, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 1, 0, 0, 1, 1, 1, 1],
[0, 0, 0, 1, 0, 1, 1, 1, 1, 0, 1, 1],
[0, 0, 0, 1, 1, 0, 1, 0, 1, 1, 1, 1],
[0, 1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0],
[0, 1, 0, 0, 1, 1, 1, 1, 1, 0, 1, 0],
[0, 1, 0, 1, 0, 0, 1, 1, 1, 1, 1, 0],
[0, 1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0],
[0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0],
[0, 1, 1, 1, 1, 0, 1, 0, 0, 0, 1, 0],
[1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 0, 0, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 0, 1, 1, 0, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 0, 0, 0, 0, 0, 1, 0, 1],
[1, 0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0, 1],
[1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 0, 1, 0, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 1, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0],
[1, 1, 1, 1, 1, 0, 0, 1, 0, 1, 0, 0] или
[1, 1, 1, 1, 1, 0, 1, 0, 1, 1, 0, 0].
Нули и единицы являются битами пилот–последовательности до модуляции, таким образом до отображения для формирования пилот–символов. Примером отображения является отображение MSK, которое будет описано в дальнейшем (см. Фиг. 11).
Таким образом вышеупомянутые конфигурации относятся, как бы, к расширению усреднения в отношении фазы при разбиении пилот–последовательности.
Если пилот–последовательность разделена на несколько подзон, то эффективность при оценке частоты повышается, так как отличие между пилот–подпоследовательностями также может быть использовано для оценки частоты, если задана когерентность между пилот–подпоследовательностями.
Если одно и то же число символов пилот–подпоследовательностей отправляется из расчета на сигнал, то длина пилот–подпоследовательностей уменьшается по отношению к общей пилот–последовательности на коэффициент числа разбитых пилот–последовательностей.
В одной конфигурации задается когерентность между пилот–подпоследовательностями.
В целом пилот–подпоследовательности определяются так, что сумма фазовых ошибок является минимизированной в случае временного сдвига по нескольким пилот–подпоследовательностям.
Вследствие этого приемник определяет фазу не только по одному сигналу, но по нескольким сигналам.
Одна конфигурация способа для передачи сигналов содержит по меньшей мере следующие этапы:
Передаются по меньшей мере два сигнала, каждый с пилот–подпоследовательностью, содержащей несколько символов пилот–последовательности.
Пилот–подпоследовательности должны быть обеспечены так, что каждая пилот–подпоследовательность содержит по меньшей мере одну группу символов, причем каждая с по меньшей мере двумя пилот–символами.
Таким образом, при оценке сигналов, принятых приемником (10) в результате передачи сигналов, группы символов формируют фазовые ошибки, которые зависят от временного смещения между опорным моментом времени передачи сигнала передатчиком и значением, которое предполагается и/или оценивается при оценке для опорного момента времени, и которые по существу взаимно компенсируют друг друга во время оценки по группам символов.
Вышеупомянутые конфигурации передатчика могут быть реализованы этапами соответствующих конфигураций способа так, что нет необходимости повторять здесь варианты осуществления.
В дополнение изобретение достигает цели посредством приемника.
В частности, в одной конфигурации приемник является независимым от конфигурации передатчика и, в частности, не связан с передатчиком, конфигурации которого были описаны выше. В альтернативных конфигурациях приемник зависит от типа передачи сигнала посредством передатчика так, что приемник и передатчик формируют систему для связи передачи данных и информации.
Приемник выполнен с возможностью приема по меньшей мере одного сигнала, переданного передатчиком. Приемник содержит устройство синхронизации. Устройство синхронизации выполнено с возможностью осуществления синхронизации приемника с передатчиком на основании принятого сигнала. Приемник содержит устройство оценки сигнала, при этом устройство оценки сигнала определяет данные синхронизации из принятого сигнала и передает их устройству синхронизации для синхронизации.
Одна конфигурация приемника предусматривает, что устройство синхронизации выполнено с возможностью осуществления синхронизации приемника с передатчиком, начиная с пилот–последовательности или пилот–подпоследовательности принятого сигнала.
В одной конфигурации на основании символов пилот–последовательности или пилот–подпоследовательности и на основании символов известной опорной последовательности или части известной опорной последовательности устройство оценки сигнала определяет несколько (таким образом по меньшей мере два) значения для фазы между пилот–последовательностью или пилот–подпоследовательностью сигнала, переданного передатчиком, и сигнала, принятого приемником в результате передачи сигнала. Начиная со значений для фазы устройство оценки сигнала определяет общее значение для фазы и передает общее значение устройству синхронизации для синхронизации.
Одна конфигурация приемника предусматривает, что устройство оценки сигнала усредняет значения для фаз, чтобы определить общее значение для фазы.
В одной конфигурации приемник принимает несколько сигналов, переданных передатчиком. Начиная с каждого принятого сигнала устройство оценки сигнала определяет данные для синхронизации. Устройство синхронизации использует данные, вместе полученные из принятых сигналов, для синхронизации.
Одна конфигурация приемника предусматривает, что приемник принимает несколько сигналов, переданных передатчиком, причем каждый содержит пилот–подпоследовательность. Пилот–подпоследовательности дополняют друг друга, чтобы формировать пилот–последовательность. Устройство оценки сигнала определяет данные синхронизации на основании каждой пилот–подпоследовательности отдельно для каждой пилот–подпоследовательности.
В одной конфигурации приемник принимает несколько сигналов, переданных передатчиком, причем каждый содержит пилот–подпоследовательность. Пилот–подпоследовательности дополняют друг друга, чтобы формировать пилот–последовательность. Устройство оценки сигнала объединяет пилот–подпоследовательности и затем определяет данные синхронизации на основании объединенных пилот–подпоследовательностей.
Одна конфигурация приемника предусматривает, что устройство оценки сигнала при оценке пилот–последовательности принятого сигнала разделяет пилот–последовательность на по меньшей мере две пилот–подпоследовательности и определяет данные синхронизации отдельно для каждой из по меньшей мере двух пилот–подпоследовательностей.
В одной конфигурации устройство оценки сигнала при оценке пилот–последовательности принятого сигнала определяет временное смещение между опорным моментом времени передачи сигнала передатчиком и значением, которое предполагается и/или оценивается при оценке для опорного момента времени. Таким образом устройство оценки сигнала осуществляет доступ к символам опорной последовательности, адаптированной к временному смещению, для дальнейшей оценки пилот–последовательности.
Одна конфигурация приемника обеспечивает, что устройство оценки сигнала при оценке пилот–подпоследовательности принятого сигнала определяет временное смещение между опорным моментом времени передачи сигнала передатчиком и значением, которое предполагается и/или оценивается при оценке для опорного момента времени. Для дальнейшей оценки пилот–подпоследовательности устройство оценки сигнала осуществляет доступ к символам части опорной последовательности, адаптированной к временному смещению, или части опорной последовательности, причем часть адаптирована к временному смещению.
В одной конфигурации устройство оценки сигнала осуществляет адаптацию опорной последовательности или части опорной последовательности путем сдвига устройством оценки сигнала известной опорной последовательности или части известной опорной последовательности по времени на определенное временное смещение.
Одна конфигурация приемника предусматривает, что устройство оценки сигнала осуществляет адаптацию опорной последовательности или части опорной последовательности путем осуществления доступа устройством оценки сигнала к памяти данных с соответствующими сохраненными опорными последовательностями или частями опорных последовательностей.
В одной конфигурации приемник содержит устройство фильтра и устройство сканирования.
Таким образом одна конфигурация относится к коррекции опорных символов или опорной последовательности для оценки принятых сигналов.
Адаптация опорной последовательности является предпочтительной, например, для случая, когда избыточная выборка принятых сигналов является очень небольшой. В дополнение временное смещение может быть оценено много более точно, например, путем интерполяции, чем это возможно для коррекции, например, под действием фильтра.
Вследствие этого опорные символы опорной последовательности, ассоциированной с соответствующим принятым сигналом, сдвигаются на определенное значение временного смещения. Скорректированные опорные символы или те, что адаптированы к временному смещению, затем используются для оценки фазовой ошибки. Таким образом временное смещение символов при оценке может быть почти полностью подавлено. Вследствие этого отрегулированные опорные последовательности вычисляются в зависимости от определенного или, например, оцененного временного смещения или берутся из памяти данных, например, поисковой таблицы.
Кроме того, изобретение достигает цели посредством способа для синхронизации приемника с передатчиком. В одной конфигурации способ является частью способа для приема сигналов, передаваемых передатчиком и принимаемых приемником. Способ главным образом содержит прием по меньшей мере одного сигнала от передатчика, оценку сигнала для получения данных синхронизации и синхронизацию приемника, используя данные синхронизации.
В одной конфигурации способ содержит по меньшей мере следующие этапы:
- По меньшей мере один сигнал, переданный передатчиком, принимается приемником.
- Начиная с пилот–последовательности или пилот–подпоследовательности принятого сигнала осуществляется синхронизация приемника посредством передатчика.
Одна конфигурация предусматривает, что на основании символов пилот–последовательности или пилот–подпоследовательности переданного сигнала и сигнала, принятого приемником вслед за передачей сигнала, множество значений определяется для фазы между пилот–последовательностью или пилот–подпоследовательностью сигнала, переданного передатчиком, и сигнала, принятого приемником вслед за передачей сигнала, и что, начиная со значений для фазы, общее значение для фазы определяется и используется для синхронизации.
В одной конфигурации предусматривается, что принимается множество переданных сигналов, что данные для синхронизации определяются из каждого принятого сигнала, и что определенные данные используются вместе для синхронизации.
Одна конфигурация предусматривает, что временное смещение определяется между опорным моментом времени передачи сигнала передатчиком и значением, которое предполагается и/или оценивается для опорного момента времени, и что пилот–последовательность принятого сигнала оценивается с помощью символов опорного сигнала, адаптированного к временному смещению.
В одной конфигурации предусматривается, что временное смещение определяется между опорным моментом времени передачи сигнала передатчиком и значением, которое предполагается и/или оценивается для опорного момента времени, и что пилот–подпоследовательность принятого сигнала оценивается с помощью символов части опорной последовательности, адаптированной к временному смещению, или с помощью символов части опорной последовательности, причем часть адаптирована к временному смещению.
Вышеупомянутые конфигурации приемника могут быть реализованы посредством этапов соответствующих конфигураций способа так, что нет необходимости повторять здесь объяснения.
Нижеследующие конфигурации приемника относятся к процедуре DFT для определения данных для синхронизации приемника с передатчиком. Нижеследующие конфигурации по меньшей мере частично дополняют предыдущие конфигурации или представляют собой независимые альтернативы.
Одна конфигурация приемника предусматривает, что приемник выполнен с возможностью приема множества фрагментов телеграммы, переданных передатчиком, при этом каждый из фрагментов телеграммы содержит пилот–подпоследовательность, при этом фрагменты телеграммы дополняют друг друга, чтобы формировать телеграмму, содержащую данные, переданные передатчиком, и при этом фрагменты телеграммы короче единой телеграммы, содержащей переданные данные. В дополнение пилот–подпоследовательности дополняют друг друга, чтобы формировать пилот–последовательность. Устройство оценки сигнала определяет значение для разности частот между частотой передачи у передатчика и частотой приема у приемника на основании пилот–подпоследовательностей и используя способ DFT. Данное определение исполняется путем определения устройством оценки сигнала значений переменных решения для каждой пилот–подпоследовательности, путем объединения устройством оценки сигнала определенных значений переменных решения по пилот–подпоследовательностям и выполнения определения максимального значения с помощью объединенных значений. Необязательно максимальное значение может быть сравнено с пороговой величиной решения.
В одной конфигурации предусматривается, что устройство оценки сигнала определяет значения переменных решения для каждой пилот–подпоследовательности путем формирования устройством оценки сигнала значений умножения для множества частот комплексного экспоненциального колебания, упоминаемых как частотные гипотезы, в виде умножения выборок соответствующей пилот–подпоследовательности с сопряженными комплексными значениями равного числа опорных символов известной опорной последовательности и с выборками комплексного экспоненциального колебания, и суммирования значений умножения.
В соответствии с одной конфигурацией устройство оценки сигнала объединяет значения переменных решения, определенных для пилот–подпоследовательностей вместе (следовательно, совместно по пилот–подпоследовательностям), для пилот–подпоследовательностей друг с другом путем сложения устройством оценки сигнала величин у значений переменных решения.
В одной конфигурации предусматривается, что устройство оценки сигнала объединяет значения переменных решения, определенных для пилот–подпоследовательностей вместе, для пилот–подпоследовательностей друг с другом, путем формирования устройством оценки сигнала суммы величин действительной части и мнимой части у значений переменных решения.
В соответствии с одной конфигурацией устройство оценки сигнала объединяет значения переменных решения, определенные для пилот–подпоследовательностей вместе, для пилот–подпоследовательностей путем суммирования устройством оценки сигнала квадратов абсолютных величин значений переменных решения.
В одной конфигурации предусматривается, что устройство оценки сигнала когерентным образом объединяет значения переменных решения, определенные для пилот–подпоследовательностей вместе, для пилот–подпоследовательностей, с учетом абсолютной величины и фазы значений переменных решения.
В соответствии с одной конфигурацией устройство оценки сигнала объединяет определенные значения переменных решения друг с другом с учетом весовых коэффициентов.
В одной конфигурации предусматривается, что устройство оценки сигнала объединяет определенные значения переменных решения с включением весовых коэффициентом, относящихся к пилот–подпоследовательностям.
В соответствии с одной конфигурацией устройство оценки сигнала определяет весовые коэффициенты на основании отношения сигнала–к–шуму соответствующего фрагмента телеграммы.
В одной конфигурации предусматривается, что устройство оценки сигнала определяет весовые коэффициенты пропорционально корню отношения сигнала–к–шуму.
В соответствии с одной конфигурацией устройство оценки сигнала определяет весовые коэффициенты пропорционально квадрату частного от деления отношения сигнала–к–шуму на мощность шума соответствующего фрагмента телеграммы.
В одной конфигурации предусматривается, что устройство оценки сигнала определяет весовые коэффициенты в зависимости от вычислительной мощности доступной для устройства оценки сигнала или в зависимости от отношения у отношения сигнала–к–шуму к предопределенному значению отношения или в зависимости от мощности помех, либо пропорционально корню из отношения сигнала–к–шуму, либо пропорционально корню из частного от деления отношения сигнала–к–шуму на мощность шума соответствующего фрагмента телеграммы.
В соответствии с одной конфигурацией приемник выполнен с возможностью приема множества фрагментов телеграммы, переданных передатчиком, при этом каждый из фрагментов телеграммы содержит пилот–подпоследовательность, при этом фрагменты телеграммы дополняет друг друга, чтобы формировать телеграмму, содержащую данные, переданные передатчиком, при этом фрагменты телеграммы короче единой телеграммы, содержащей переданные данные, и при этом пилот–подпоследовательности дополняют друг друга, чтобы формировать пилот–последовательность. Устройство оценки сигнала определяет значение для разности частот между частотой передачи у передатчика и частотой приема у приемника, начиная с пилот–подпоследовательностей и используя способ DFT, путем определения устройством оценки сигнала значений переменных решения для каждой пилот–подпоследовательности, объединения определенных значений переменных решения по пилот–подпоследовательностям друг с другом и осуществления определения максимального значения с помощью объединенных значений. Таким образом устройство оценки сигнала осуществляет оценку времени для временного смещения между опорным моментом времени передачи фрагмента телеграммы и значением, которое предполагается и/или оценивается при оценке фрагмента телеграммы для опорного момента времени, путем определения устройством оценки сигнала значения оценки времени для временного смещения на основе максимального значения, полученного путем определения максимального значения, и по меньшей мере одного значения, смежного с максимальным значением относительно временной переменной.
В одной конфигурации предусматривается, что приемник выполнен с возможностью приема по меньшей мере одной телеграммы, переданной передатчиком, при этом телеграмма содержит пилот–последовательность. Устройство оценки сигнала определяет, начиная с пилот–последовательности и используя способ DFT, значение для разности частот между частотой передачи у передатчика и частотой приема у приемника, путем определения устройством оценки сигнала значений переменных решения для пилот–последовательности, исполнения определения максимального значения. Таким образом устройство оценки сигнала осуществляет оценку времени для временного смещения между опорным моментом времени передачи телеграммы и значением, которое предполагается и/или оценивается при оценке телеграммы для опорного момента времени, путем определения устройством оценки сигнала значения оценки времени для временного смещения на основе максимального значения, полученного путем определения максимального значения, и по меньшей мере одного значения, смежного с максимальным значением относительно временной переменной.
В соответствии с одной конфигурацией, начиная с максимального значения, которое определяется максимальным значением и положительным сравнением максимального значения с пороговой величиной решения, устройство оценки сигнала получает максимальное значение.
В одной конфигурации предусматривается, что устройство оценки сигнала формирует оцененное значение времени из максимального значения и двух смежных значений, и что два смежных значения предшествуют или следуют за определенным максимальным значением относительно временной переменной.
В соответствии с одной конфигурацией устройство оценки сигнала определяет полином для максимального значения и двух смежных значений. В дополнение устройство оценки сигнала определяет оцененное значение времени из экстремального значения, ассоциированного с полиномом.
Одна конфигурация состоит в том, что устройство оценки сигнала осуществляет интерполяцию с помощью полинома второй степени.
В соответствии с одной конфигурацией устройство (12) оценки сигнала выполняет интерполяцию с помощью полинома следующей формы: y(x) = y0 – c(x–x0)2, причем свободные параметры y0, c и x0 определяются на основе максимального значения и смежных значений.
Устройство преобразования определяет максимальное значение интерполяционной кривой с помощью следующей функции: 
при этом x0 является значением абсциссы у максимума полинома, y(0) является максимальным значением, а y(–1) и y(1) являются смежными значениями.
Полином второй степени формы y(x) = y0 – c(x–x0)2, используется в качестве интерполяционной функции в одной конфигурации.
Значение x0 абсциссы у максимума полинома, например, представляет собой улучшенную оценку времени (нормализованную к интервалу выборки T/N).
Из значения x0 абсциссы у максимума полинома, улучшенное оцененное по частоте значение может быть вычислено через
В одной конфигурации предусматривается, что приемник выполнен с возможностью приема множества фрагментов телеграммы, переданных передатчиком, при этом каждый из фрагментов телеграммы имеет пилот–подпоследовательность, при этом фрагменты телеграммы дополняют друг друга, чтобы формировать телеграмму, содержащую данные, переданные передатчиком, при этом фрагменты телеграммы короче единой телеграммы, содержащей преданные данные, и при этом пилот–подпоследовательности дополняют друг друга, чтобы формировать пилот–последовательность.
Устройство оценки сигнала, начиная с пилот–подпоследовательностей и используя способ DFT, определяет значение для разности частот между частотой передачи у передатчика и частотой приема у приемника. Это происходит путем определения средством оценки сигнала значений переменных решения для каждой пилот–подпоследовательности, объединения определенных значений переменных решения по пилот–подпоследовательностям и определения максимального значения с помощью объединенных значений.
Устройство оценки сигнала исполняет оценку частоты для разности частот путем определения устройством оценки сигнала оценки частоты на основании максимального значения, полученного путем определения максимального значения, и по меньшей мере одного значения, смежного с максимальным значением относительно частотной переменной.
В соответствии с одной конфигурацией приемник выполнен с возможностью приема по меньшей мере одной телеграммы, переданной передатчиком, при этом телеграмма содержит пилот–последовательность. Устройство оценки сигнала определяет, начиная с пилот–последовательности и используя способ DFT, значение для разности частот между частотой передачи у передатчика и частотой приема у приемника путем определения устройством оценки сигнала значений переменных решения для пилот–последовательности и исполнения определения максимального значения. Средство оценки сигнала определяет оценку частоты для разницы частот путем выполнения оценки частоты по максимальному значению, полученному путем определения максимального значения, и по меньшей мере одному значению, смежному с максимальным значением относительно частотной переменной.
В одной конфигурации предусматривается, что устройство оценки сигнала принимает максимальное значение на основании максимального значения и положительного сравнения максимального значения с пороговой величиной решения.
В соответствии с конфигурацией устройство оценки сигнала формирует оцененное по частоте значение из максимального значения и двух смежных значений, при этом два смежных значения предшествуют или следуют за определенным максимальным значением относительно частотной переменной.
В одной конфигурации предусматривается, что устройство оценки сигнала определяет полином для максимального значения и двух смежных значений, и что устройство оценки сигнала определяет оцененное по частоте значение из экстремального значения, ассоциированного с полиномом.
Одна конфигурация состоит в том, что устройство оценки сигнала исполняет интерполяцию с помощью полинома второй степени.
В соответствии с одной конфигурацией устройство (12) оценки сигнала исполняет интерполяцию с помощью полинома следующей формы: y(x) = y0 – c(x–x0)2, при этом свободные параметры y0, c и x0 определяются на основе максимального значения и смежных значений.
Устройство преобразования определяет максимальное значение интерполяционной кривой с помощью следующей функции:
при этом x0 является значением абсциссы у максимума полинома, y(0) является максимальным значением, а y(–1) и y(1) являются смежными значениями.
Полином второй степени формы y(x) = y0 – c(x–x0)2, используется в качестве интерполяционной функции в одной конфигурации.
Значение x0 абсциссы у максимума полинома, например, представляет собой улучшенную оценку времени (нормализованную к интервалу выборки T/N).
Из значения x0 абсциссы у максимума полинома, улучшенное оцененное по частоте значение может быть вычислено через
В соответствии с одной конфигурацией устройство оценки сигнала определяет оцененное по времени значение и использует его для повторного определения разницы частот посредством устройства оценки сигнала во время возобновленного определения значений переменных решения, используя выборки соответствующих пилот–подпоследовательностей, которые сдвинуты на оцененное по времени значение, или путем сдвига опорных символов у опорной последовательности на оцененное по времени значение во времени.
В одной конфигурации предусматривается, что устройство оценки сигнала исполняет интерполяцию выборок соответствующих пилот–подпоследовательностей для возобновленного определения разности частот.
В соответствии с конфигурацией после того, как разность частот была повторно определена, устройство оценки сигнала осуществляет оценку частоты для разности частот путем определения устройством оценки сигнала оценки частоты на основе максимального значения, полученного путем определения максимального значения и положительного сравнения с пороговой величиной решения, и по меньшей мере одного значения, смежного относительно частотной переменной.
Вышеупомянутые конфигурации приемника также могут быть реализованы для способа синхронизации – при необходимости как часть способа для приема сигналов.
Одна конфигурация способа, который является дополнительным или альтернативным для вышеупомянутых конфигураций, обеспечивает
– что множество фрагментов телеграммы, переданных передатчиком, принимаются приемником,
- при этом каждый из фрагментов телеграмм содержит пилот–подпоследовательность,
- при этом фрагменты телеграммы дополняют друг друга, чтобы формировать телеграмму, содержащую данные, переданные от передатчика,
- при этом фрагменты телеграммы короче телеграммы,
- при этом пилот–подпоследовательности дополняют друг друга, чтобы формировать пилот–последовательность,
- что приемник синхронизируется с передатчиком начиная с пилот–подпоследовательностей,
- при этом значение для разницы частот между частотой передачи у передатчика и частотой приема у приемника определяется, начиная с пилот–подпоследовательностей и используя способ DFT,
- путем определения значений переменных решения для каждой пилот–подпоследовательности,
- путем объединения определенных значений переменных решения по всем пилот–подпоследовательностям, и
- путем определения максимального значения с помощью объединенных значений.
Одна конфигурация предусматривает, что множество фрагментов телеграммы, переданных передатчиком, принимаются приемником, при этом каждый из фрагментов телеграммы содержит пилот–подпоследовательность, при этом фрагменты телеграммы дополняют друг друга, чтобы формировать телеграмму, содержащую данные, переданные передатчиком, при этом фрагменты телеграммы короче телеграммы, при этом пилот–подпоследовательности дополняют друг друга, чтобы формировать пилот–последовательность.
Начиная с пилот–подпоследовательностей приемник синхронизируется с передатчиком. Начиная с пилот–подпоследовательностей и используя способ DFT, значение для разности частот между частотой передачи у передатчика и частотой приема у приемника определяется путем определения значений переменных решения для каждой пилот–подпоследовательности, путем объединения определенных значений переменных решения по всем пилот–подпоследовательностям друг с другом и путем определения максимального значения с помощью объединенных значений. Оценка времени для временного смещения между опорным моментом времени передачи фрагмента телеграммы и значением, которое предполагается и/или оценивается при оценке фрагмента телеграммы для опорного момента времени, осуществляется путем определения устройством оценки сигнала оценки времени для временного смещения начиная с максимального значения, полученного путем определения максимального значения, и по меньшей мере одного значения, смежного с максимальным значением относительно временной переменной.
Одна конфигурация состоит в том, что по меньшей мере одна телеграмма, переданная передатчиком, принимается приемником, при этом телеграмма содержит пилот–последовательность, при этом начиная с пилот–последовательности приемник синхронизируется с передатчиком, при этом начиная с пилот–последовательности и путем использования способа DFT, значение для разницы частот между частотой передачи у передатчика и частотой приема у приемника определяется путем определения значений переменных решения для пилот–последовательности, путем исполнения определения максимального значения с помощью определенных значений, при этом оценка времени для временного смещения осуществляется между опорным моментом времени передачи фрагмента телеграммы и значением, которое предполагается и/или оценивается при оценке фрагмента телеграммы для опорного момента времени, путем определения устройством оценки сигнала значения оценки времени для временного смещения, начиная с максимального значения, полученного путем определения максимального значения, и по меньшей мере одного значения, которое является смежным с максимальным значением относительно временной переменной.
Одна конфигурация предусматривает, что множество фрагментов телеграммы, переданных передатчиком, принимается приемником, при этом каждый из фрагментов телеграммы содержит пилот–подпоследовательность, при этом фрагменты телеграммы дополняют друг друга, чтобы формировать телеграмму, содержащую данные, переданные передатчиком, при этом фрагменты телеграммы короче телеграммы, при этом пилот–подпоследовательности дополняют друг друга, чтобы формировать пилот–последовательность, при этом приемник синхронизируется с передатчиком, начиная с пилот–подпоследовательностей. Начиная с пилот–подпоследовательностей и используя способ DFT, значение для разницы частот между частотой передачи у передатчика и частотой приема у приемника определяется путем определения значений переменных решения для каждой пилот–подпоследовательности, путем объединения определенных значений переменных решения по всем пилот–подпоследовательностям друг с другом и путем определения максимального значения с помощью объединенных значений. Оценка частоты для разности частот осуществляется путем определения оценки частоты устройством оценки сигнала из максимального значения, полученного путем определения максимального значения, и по меньшей мере одного значения, смежного с максимальным значением относительно частотной переменной.
Одна конфигурация состоит в том, что по меньшей мере одна телеграмма, переданная передатчиком, принимается приемником, при этом телеграмма имеет пилот–последовательность. Начиная с пилот–последовательности приемник синхронизуется с передатчиком. Начиная с пилот–последовательности и используя способ DFT значение для разности частот между частотой передачи у передатчика и частотой приема у приемника определяется путем определения значений переменных решения для пилот–последовательности, путем определения максимального значения с помощью определенных значений. Оценка частоты осуществляется для разности частот путем определения оценки частоты устройством оценки сигнала из максимального значения, полученного путем определения максимального значения, и по меньшей мере одного значения, смежного с максимальным значением относительно частотной переменной.
Вышеприведенные конфигурации приемника могут быть реализованы посредством этапа соответствующих конфигураций способа так, что нет необходимости повторять здесь объяснения.
В зависимости от своего исполнения приемник использует способ для оценки частоты в случае фрагментированной передачи, таким образом, в случае фрагментации телеграмм при «разбиении телеграммы».
В одной конфигурации способ DFT для оценки частоты таким образом расширяется на разбиение телеграммы.
В одной конфигурации объединение выполняется после DFT, которое используется для отдельных фрагментов телеграммы, и до того, как осуществляется поиск максимального значения, которое таким образом относится к всем фрагментам телеграммы.
В одной конфигурации обработка сигнала до способа DFT и включая DFT применяется к каждому фрагменту телеграммы для того, чтобы объединить результаты перед поиском максимального значения через частотные гипотезы. Таким образом дальнейшая обработка основана на объединенных значениях.
Преимуществом данного объединения является значительное подавление шума, что значительно улучшает оцененные частоту и время.
В одной конфигурации объединение имеет место путем взвешенного сложения отдельных результатов, например, абсолютных величин или квадратов абсолютных величин.
В разных конфигурация взвешенное сложение каждого из отдельно определенных значений переменных решения осуществляется путем сложения.
- абсолютных величин,
- суммы абсолютных величин действительных и мнимых частей, или
- квадратов абсолютных величин.
Математически конфигурации могут быть сформулированы следующим образом:
При условии, что di, n[k] являются переменными решениями (для i=0, 1, …, NDFT–1) у kого времени выборки после DFT nого фрагмента.
Тогда:
сложение абсолютных величин:  (5)
(5)
сложение абсолютных величин Re и Im:  (6)
(6)
Сложение квадратов абсолютных величин:
 (7)
(7)
В одной конфигурации предусматривается, что сетка символов остается постоянной в течение продолжительности всех переданных фрагментов и что расстояние между фрагментами (например, по числу интервалов символов) известно приемнику. В данном случае kые выборки из каждого фрагмента телеграммы (посчитанные с начала фрагмента) соответствуют друг другу. Кроме того, в одной конфигурации предусматривается, что уход частоты значительно не меняется в течение продолжительности всех фрагментов.
В одной конфигурации происходит когерентное объединение, т.е. объединение в соответствии с величиной и фазой определенного значения переменной решения. Это в частности так, для случая, когда фаза несущей остается одной и той же от фрагмента телеграммы к фрагменту телеграммы, т.е. когерентность должна быть дана по фрагментам телеграммы.
Выбор весовых коэффициентов для сложения значений переменных решения указывается более подробно в некоторых конфигурациях.
В одной конфигурации вышеупомянутые весовые коэффициенты cn выбираются пропорционально квадрату оцененного отношения SNRn сигнала–к–шуму у nого фрагмента телеграммы, при этом оцененное SNR в одной конфигурации также включает в себя мощность любого из доступных сигналов помехи. Это соответствует Оптимальному Сложению (MRC) применительно к разнесению антенн.
В случае мощностей помех, которые могут быть разными для отдельных фрагментов, одна конфигурация предусматривает, что весовые коэффициенты должны устанавливаться пропорционально квадрату отношения SNRn/PNn у оцененного SNR к оцененной мощности PN шума у nого фрагмента телеграммы.
Выбор весовых коэффициентов максимально увеличивает SNR в переменной решения после объединения.
В качестве альтернативы вышеупомянутые весовые коэффициенты cn устанавливаются в 1. Это соответствует хорошо известному Линейному Сложению (EGC) для разнесения антенн.
Одна конфигурация представляет собой улучшение оцененных значений параметра.
В одной конфигурации, таким образом, оценка времени улучшается посредством интерполяции.
Для того, чтобы увеличить точность оценки времени предусматривается улучшение оценки времени путем интерполяции между максимальным значением (соответственно |di[k0]|), значением до (соответственно |di[k0–1]| и значением после (соответственно |di[k0+1]|), после определения индекса k0 времени в способе DFT.
Два соседних значения должны иметь один и тот же индекс частоты в качестве максимального значения, т.е. i=i0[k0].
Полином второй степени формы y(x) = y0 – c(x–x0)2 используется в качестве интерполяционной функции в одной конфигурации.
В одной конфигурации свободные параметры y0, c и x0 определяются так, что полином проходит через три значения y(–1) = |di[k0–1]|, y(0) = |di[k0]| и y(1) = |di[k0+1]|.
Значение x0 абсциссы у максимума полинома представляет собой улучшенную оценку времени (нормализованную к интервалу выборки T/N). Оно может быть вычислено из трех заданных y–значений следующим образом:
 .
.
В альтернативной или добавочной конфигурации оценка частоты улучшается посредством интерполяции.
Для того чтобы увеличить точность оценки частоты одна конфигурация предусматривает улучшение оценки частоты путем интерполяции между максимальным значением в позиции i0 (соответственно  ), значением для i0–1 (соответственно
), значением для i0–1 (соответственно  ) и значением для i0+1 (соответственно
) и значением для i0+1 (соответственно  ), после определения индекса k0 времени.
), после определения индекса k0 времени.
Два соседних значения должны происходить из одного и того же DFT, из которого было определено максимальное значение. Это DFT в момент времени k0.
В одной конфигурации полином второй степени формы y(x) = y0 – c(x–x0)2 используется в качестве интерполяционной функции. Это соответствует ранее упомянутому полиному, как описано для улучшения оценки времени.
Свободные параметры y0, c и x0 определяются так, что полином проходит точно через три значения y(1) =  , y(–1) =
, y(–1) =  , y(0) =
, y(0) =  .
.
Из значения x0 абсциссы максимума полинома улучшенное оцененное по частоте значение может быть вычислено через
 (8)
(8)
Значение x0 может быть вычислено из трех заданных y–значений по формуле (8).
В одной конфигурации предусматривается следующая последовательность мер для улучшения оцененного значения.
Для того чтобы оптимизировать оценку времени и частоты предусматривается работа с коэффициентом избыточной выборки N=2 в одной конфигурации и выполнение следующих операций в определенной очередности:
1. Интерполяция в диапазоне времени как описано выше. Одним результатом является оценка  времени.
времени.
2. Примерный расчет L новых выборок сигнала x(t) в такте символа, при этом моменты времени выборки сдвинуты на относительно исходных. Это выполняется надлежащим образом посредством интерполяционной фильтрации существующих выборок x[k–LN–1], x[k–LN], …, x[k+2].
- Фильтр FIR с четырьмя коэффициентами используется в качестве интерполяционного фильтра в одной конфигурации. Опыт показывает, что это обеспечивает достаточную точность с 2–кратной избыточной выборкой.
- Для того чтобы вычислить коэффициенты фильтра используется способ минимизации среднеквадратичной ошибки (Минимальная Среднеквадратичная Ошибка=MMSE), при этом свертывание импульса модуляции с импульсной характеристикой фильтра приема служит в качестве основы вычисления. При согласованном фильтре в качестве фильтра приема это является ACF у импульса модуляции.
- Коэффициенты фильтра могут быть вычислены и сохранены заранее для достаточно мелкой сетки гипотез оценки времени (например, сетки 0.01T). Фильтр, временные гипотезы которого находятся наиболее близко к текущему оцененному времени , используется в каждом случае.
3. Повторное вычисление переменной решения di[k0] основано на выборках, полученных в результате интерполяции на предыдущем этапе. Таким образом может быть выбрана другая длина DFT.
- Поскольку интересуют только три выходных значения DFT, то это может быть замещено умножением ее три раза на выборки трех комплексных экспоненциальных колебаний с частотами  ,
,  и
и  , при сохранении длины DFT.
, при сохранении длины DFT.
4. Полиномиальная интерполяция в частотном диапазоне как описано выше. Одним результатов является оценка  частоты.
частоты.
5. Для того чтобы дополнительно улучшать оцененные значения, затем осуществляется вторая полиномиальная интерполяция в дополнительной конфигурации, используя значения, которые лежат в более плотной сетке частоты. С этой целью входные значения DFT должны быть умножены три раза с выборками трех комплексных экспоненциальных колебаний с частотами  ,
,  и
и  , при этом должна быть выбрана ΔyT<<1/NDFT.
, при этом должна быть выбрана ΔyT<<1/NDFT.
В одной конфигурации применяется следующее:  .
.
В качестве альтернативы этапам с 3 по 5 в одной конфигурации используется процедура для непосредственной оценки оставшегося ухода частоты. Т.е., например, способ в соответствии с алгоритмом Луиза и Реджаннини.
С этой целью требуются только следующие этапы:
3. Вычисление L значений в соответствии с
 для l=0, 1, 2, …, L–1 (9)
для l=0, 1, 2, …, L–1 (9)
при этом выборки x[.] являются интерполированными значениями из 2ого этапа. Умножение на комплексное экспоненциальное колебание с частотой соответствует коррекции частоты на частоту .
4. Исполнение вычислений в соответствии с формулами (2) и (4) со значениями из формулы (9). Оцененное значение для всего ухода частоты затем вычисляется из суммы и оцененного значения из формулы (4).
Кроме того, изобретение относится к системе передачи сигнала, которая содержит по меньшей мере один передатчик в одной из конфигураций, которые обсуждались выше, и по меньшей мере один приемник в одной из конфигураций, которые обсуждались выше.
В заключение изобретение относится к компьютерной программе с программным кодом для исполнения вышеупомянутого способа в соответствии с одной из вышеупомянутых конфигураций.
Подробно, существует множество возможностей для того, чтобы сконфигурировать и дополнительно разработать передатчик, приемник, систему и соответствующие способы. С этой целью с одной стороны обращаются к формуле изобретения, а с другой стороны к нижеследующему описанию вариантов осуществления вместе с чертежами, на которых:
Фиг. 1 показывает схематическое представление обработки сигнала для оценки времени и частоты,
Фиг. 2 показывает представление сигнала основной полосы частот MSK для трех положительно отображенных символов,
Фиг. 3 показывает представление сигнала основной полосы частот MSK с идеальным временным смещением,
Фиг. 4 показывает представление сигнала основной полосы частот MSK с отрицательным временным смещением,
Фиг. 5 показывает ход амплитуды символа после согласованной фильтрации по временному смещению,
Фиг. 6 показывает ход фазового смещения у символа, рассмотренного на Фиг. 5, по временному смещению после согласованной фильтрации и умножения на комплексно–сопряженное опорного символа,
Фиг. 7 показывает представление сигнала основной полосы частот MSK для трех символов, причем последний символ отображен отрицательным образом,
Фиг. 8 показывает ход амплитуды символа с Фиг. 7 после согласованной фильтрации по временному смещению,
Фиг. 9 показывает ход фазового смещения у символа, рассмотренного на Фиг. 8, по временному смещению после согласованной фильтрации и умножения на комплексно–сопряженное опорного символа,
Фиг. 10 показывает схематическое представление системы связи с передатчиком и приемником,
Фиг. 11 показывает схематическое представление примера используемой модуляции и
Фиг. 12 показывает видоизменение интерполяции посредством полинома второй степени.
При разбиении телеграммы (см., например, DE 10 2011 082 098 A1), данные, которые должны быть переданы не передаются в одном пакете данных, а формируется несколько пакетов данных, которые могут быть переданы с разными частотами и в разные моменты времени. Таким образом несколько фрагментов телеграммы формируется из одной телеграммы. Каждый фрагмент телеграммы имеет пилот–последовательность, которая используется для синхронизации между передатчиком и приемником. Пилот–последовательности являются идентичными в одной конфигурации и разными в другой конфигурации.
Пилот–последовательность состоит из числа L символов модуляции (также упоминаемых как пилот–символы или здесь в тексте символы пилот–последовательности) и обычно передаются компактно либо в начале (преамбула), либо в середине (мидамбула) телеграммы. В качестве альтернативы пилот–последовательность также может быть произвольно распределена по символам данных. Обычной практикой является использование пилот–символов из того же самого алфавита модуляции, что и символы данных (например, многоуровневая фазовая манипуляция, M–PSK, или Квадратурная Амплитудная Модуляция с Числом Значащих Позиций, Равным M, M–QAM). Пилот–символы известны получателю заранее или сохранены соответствующим образом.
В приемниках обычной практикой является понижение частоты принятого сигнала до основной полосы частот после полосовой фильтрации и осуществление его выборки и квантования равноудалено по времени с использованием аналого–цифрового преобразователя (ADC). Каждое выборочное значение является комплексным и состоит из действительной и мнимой части. Таким образом выборка осуществляется по меньшей мере в такте символа или, как правило, в целых кратных (избыточная выборка).
Для оценки времени и оценки частоты, требуемых для синхронизации, известно несколько способов, которые описываются в нижеследующем.
Способ DFT:
В [9] описывается способ, который также подходит для больших уходов частоты. Уход частоты является разницей частот между частой несущей у сигнала передачи и центральной частотой фильтра приема. Неотъемлемые этапы обработки сигнала иллюстрируются на Фиг. 1.
Таким образом, T является расстоянием между символами или 1/T является частотой символов. N является коэффициентом избыточной выборки и k*T/N указывает время kого выборочного значения. Пилот–символы обозначаются a[0], a[1], …, a[L–1], при этом a[0] передается первым, а a[L–1] последним. Символ * верхнего индекса указывает на то, что должно быть использовано сопряженное комплексное значение. В заключение, элемент задержки идентифицируется посредством z–N, где задержка составляет N выборок. Кроме того, W является длиной окна для поиска максимального значения в числе выборочных значений.
Переменные времени в круглых скобках всегда являются непрерывными во времени, например, r(t) указывает непрерывный по времени сигнал приема. В противоположность, переменные времени в квадратных скобках всегда являются дискретными по времени и обычно представляют собой последовательную нумерацию выборок. Например, x[k] обозначает kое значение (непрерывного по времени) сигнала x(t) после фильтра приема.
После фильтра приема, который формирует сигнал x(t) из сигнала r(t), осуществляется равноудаленная выборка сигнала по времени с помощью N значений из расчета на символ и квантование. В каждый момент времени k, L символов берется с расстоянием между символами (т.е., каждая Nая выборка) и сначала умножается на L сопряженных комплексных пилот–символов. Они умножаются на выборки комплексного экспоненциального колебания и затем суммируются. Последняя процедура исполняется несколько раз для разных частот данного колебания, которые называются частотными гипотезами. Для равноудаленных частотных гипотез это соответствует дискретному преобразованию Фурье (DFT) у L значений x[k]a*[L–1], x[k–N]a*[L–2] до x[k–(L–1)N]a*[0].
DFT может осуществляться в частности эффективным образом в форме хорошо известного алгоритма быстрого преобразования Фурье (FFT), при условии, что L является степенью двух. Если L не является степенью двух, то длина DFT округляется до следующей более высокой степени двух и соответствующее число нулей добавляется к L значениям так, что может быть применено FFT. Для увеличения точности оценки частоты L входных значений FFT могут быть дополнены любым числом дополнительных нулей.
Каждая частотная гипотеза дает комплексное значение, идентифицируемое посредством di[k], которое упоминается как переменная решения. Индекс i относится к iой частоте. Для каждого временного шага k максимальная величина |di[k]| определяется для всех индексов i частоты. Индекс частоты, которому принадлежит максимум, идентифицируется посредством i0. Если данный максимум находится выше пороговой величины dthr решения, то считается, что пилот–последовательность (в качестве альтернативы также упоминается как обучающая последовательность) распознана. Ассоциированный индекс времени идентифицируется посредством k’. В положительном случае, когда максимум лежит выше пороговой величины решения, k’ таким образом устанавливается равным k. В отрицательном случае, k увеличивается (k становится k+1, Фиг. 1). Сравнение с пороговой величиной решения является необязательным в каждом случае.
Известно, что дальнейший анализ принятого сигнала необходим для более точной оценки времени.
Дальнейшая обработка является следующей:
Переменные решения в момент времени k’ и для каждого следующего момента времени k’ анализируются и определяется максимальная величина в рамках окна времени заданной продолжительности. Индекс времени, которому принадлежит данный максимум, идентифицируется посредством k0.
Частота, которая принадлежит индексу i0[k0] уже представляет собой грубую оценку ухода частоты. Она идентифицируется посредством ν0 и задается как
 (1)
(1)
Для аддитивных гауссовых возмущений способ DFT является оптимальным исходя из оценки максимального правдоподобия. Это приемлемо для ухода частоты почти до половины скорости передачи символов. Точность оценки по существу ограничивается коэффициентом N избыточной выборки и длиной NDFT DFT. Для большого N и большого NDFT среднеквадратичная ошибка оценки как для времени, так и частоты подходит к теоретически достижимому пределу (граница Крамера–Рао). Способ может быть использован для любых пилот–последовательностей.
Оценка частоты в соответствии с алгоритмом Луиза и Реджаннини:
Средство оценки в соответствии с алгоритмом Луиза и Реджаннини основано на следующих значениях:
 для λ = 0, 1, …, Λ (2)
для λ = 0, 1, …, Λ (2)
с
z[l] = x[k–L–1–l)N]a*[l] (3)
Оценка частоты получается из
 (4)
(4)
Средство оценки обладает следующими признаками:
- В рамках используемого диапазона оценки оно также объективно для низкого Es/N0 – таким образом, энергии из расчета на символ или меры отношения сигнала–к–шуму – в качестве спектральной плотности мощности шума.
- Для Λ = L/2 и Es/N0 > 0дБ средство оценки находится близко к границе Крамера–Рао и для нуля ухода частоты как раз на границе Крамера–Рао. Оно может быть описано как оптимальное.
- Диапазон оценок ограничивается:  .
.
Недостаток состоит в том, что достаточно точное время синхронизации необходимо до применения. Другой недостаток состоит в том, что способ не пригоден для больших полос частот из–за ограниченного диапазона оценки.
Оценка фазы может быть улучшена как описано ниже.
Применительно к оценке сдвига фаз с поддержкой данными в когерентных приемниках обычно используются символы синхронизации, присутствующие в переданном пакете. Таким образом используются пилот–символы у пилот–последовательностей. Фазы принятых символов сравниваются с ожидаемыми фазами (опорными символами). Разность двух результатов дает сдвиг фаз. Применительно к сокращению шума, например, исполняется усреднение по нескольким символам.
Примером такой оценки фазы является Средство Оценки Максимального Правдоподобия (см. [6]).
Данное средство оценки достигает полезных результатов, если известно точное время передачи. Тем не менее, это обычно определяется на предыдущей оценке, при этом шум и прочие эффекты вызывают вариации. В дополнение из–за ограничения по вычислительной мощности не всегда возможно выполнять достаточно точную оценку времени.
Таким образом символы приема содержат остаточное временное смещение, которое включено в оценку фазы и ухудшает ее. Остаточное временное смещение или общее временное смещение приводит к фазовой ошибке, которая добавляется к интересующей фазе между частотой передачи и частотой приема у приемника и, вследствие этого, ослабляет оценку.
В нижеследующем, описаны конфигурации, которые приводят к улучшению оценки фазы. Данные конфигурации также применяются к улучшенной оценке частоты в случае, когда оценка частоты основана на разностях фаз смежных символов.
Во время восстановления символа (например, путем согласованной фильтрации и последующей подвыборки) временное смещение также вводит часть по меньшей мере одного соседнего символа в результат. Данное явление описывается ниже с использованием модуляции MSK. Отображение служит, например, для отображения битов пилот–последовательности в фактических символах пилот–последовательностей.
Чтобы упростить иллюстрацию каждый из нижеследующих графиков содержит только три символа. Средний символ представляет собой исследуемый символ, а два других представляют собой предыдущий или последующий символ.
Фиг. 2 показывает сигнал основной полосы частот MSK с тремя символами. Исследуемый символ, как, впрочем, и предыдущий и последующий символ был отображен с положительной амплитудой. Таким образом, это средний символ и два фланговых символа. Кривая a показывает действительную часть, и кривая b показывает мнимую часть сигнала. Амплитуда нанесена по оси y относительно времени в моментах времени выборки по оси x.
В нижеследующем исследуется влияние фазы для среднего символа, который переносится по действительной части. Два других фланговых символа (предыдущий и последующий символ) переносятся в мнимую часть в качестве примера отображения, когда создаются символы, которые должны быть переданы, в соответствии с правилом MSK.
Восстановление символа происходит в приемнике с использованием согласованного фильтра, который умножается на сигнал и затем суммируется по всему символу. Фиг. 3 показывает длину согласованного фильтра (строго кривая c). Фильтр распространяется на весь средний символ. Таким образом Фиг. 3 иллюстрирует идеальный случай, при котором не происходит временного смещения.
Из–за особой модуляции MSK так называемые ISI (Межсимвольные Помехи, см. [7]) вставляются во время согласованной фильтрации, чтобы воссоздать символы. Перекрестные помехи символов известны и могут быть учтены при вычислении разностей фаз.
Для восстановления символа данные внутри показанной зоны вырезаются соответственно и умножаются на согласованный фильтр (оптимальный фильтр) или аппроксимацию. Символ получается в результате интеграции (в непрерывном случае) или суммирования (в дискретном случае).
Если воссозданный символ на Фиг. 3 сравнивается с символом передачи (или опорным символом доступным приемнику), то становится очевидно, что отсутствует сдвиг фаз между двумя символами.
Тем не менее, если происходит временное смещение, то окно для согласованного фильтра перемещается. Фиг. 4 показывает это для отрицательного временного смещения, при котором корректное время лежит после предполагаемого времени. Вследствие этого начало символа предполагается слишком рано. Применительно к определению фазы, вследствие этого, временное смещение приводит к фазовой ошибке как дополнительной ошибке при фактическом определении фазы.
Из–за временного смещения больше энергии предшествующего флангового символа и меньше у фактического интересующего среднего символа попадает в воссоздание среднего символа. Таким образом значение отклоняется от ожидаемого целевого значения. Тем не менее, если принятое значение отклоняется от ожидаемого значения, то данное отклонение вызывает ошибку в оценке фазы.
Аналогичным образом это применяется к положительному временному смещению, при котором фактический символ начинается до предполагаемого времени. Тем не менее, это увеличивает влияние флангового символа, следующего за средним символом.
Фиг. 5 показывает ход результатов воссоздания символа при разных временных смещениях. Середина представляет собой идеальное время. Амплитуда нанесена по оси y относительно временного смещения (или альтернативно упоминаемого как ошибка временной привязки) в длинах символа. Применяется действительная часть R и мнимая часть I.
Фиг. 5 показывает, что в идеальное время влияние соседних символов (таким образом фланговых символов в примере на Фиг. 2) является минимальным. С увеличением временного смещения влияние соседних символов увеличивается, т.е. в данном примере с модуляцией MSK, амплитуда мнимой части увеличивается.
Если символ приема (таким образом в данном случае средний символ) умножается на комплексно–сопряженное символа передачи (таким образом опорного символа или ассоциированного символа опорной последовательности) после согласованной фильтрации, то получается фазовое смещение между опорным символом и рассматриваемым средним символом у объединения трех символов пилот–последовательности принятого сигнала.
Фиг. 6 показывает фазовое смещение для символа, ассоциированного с Фиг. 5, над временным смещением. В данном созвездии символа фазовое смещение – следовательно, результирующие фазовые ошибки из–за временного смещения – всегда положительное. Тем не менее величина зависит от величины временного смещения.
Предыдущие объяснения показывают, что результат согласованной фильтрации и, следовательно, также фазовая ошибка для временных смещений зависят от предыдущего и последующего символов – следовательно, символов, которые являются фланговыми для среднего символа, рассматриваемого в примере.
Для того чтобы определить это полностью, результат согласованной фильтрации был повторно вычислен при временном смещении для другого созвездия символа. Символ для просмотра также был вновь отображен с положительной амплитудой, тем не менее, два фланговых символа имеют другие амплитуды. Комплексный сигнал основной полосы частот и результат согласованной фильтрации с разными временными смещениями показаны на Фиг. 7 и Фиг. 8.
Фиг. 7 показывает амплитуду трех символов b, а, b относительно времени в частотах выборки. Два фланговых символа b содержат средний символ a. При данном сигнале MSK в выбранном созвездии не происходит межсимвольных помех (ISI) при идеальном времени выборки из–за фланговых символов со средним символом.
Фиг. 8 показывает амплитуду среднего символа после согласованной фильтрации в зависимости от временного смещения.
Если, после согласованной фильтрации, символ приема умножается на сопряженное комплексное значение символа передачи точно таким же образом, как на Фиг. 6, то получается фазовое смещение между опорным символом и наблюдаемым рассматриваемым символом приема.
Фазовое смещение показано на Фиг. 9 для среднего символа для временного смещения, показанного на Фиг. 8. В сравнении с Фиг. 6 ход фазового смещения не является более только положительным при всех возможных временных смещениях. Для отрицательных временных смещений фазовое смещение является положительным, а для положительных временных смещений оно меняет свой знак и становится отрицательным.
В целом фазовое смещение зависит от символов, которые являются фланговыми для оцениваемого символа.
Вследствие этого символы выбираются так, что фазовые ошибки, получаемые от временного смещения при оценке отдельных символов, компенсируют друг друга при усреднении по затронутым символам – будь то из одного сигнала или по нескольким сигналам.
Фиг. 10 показывает Систему 50 с передатчиком 1 и приемником 10.
Передатчик 1 имеет генератор 2 сигнала и устройство 3 вывода сигнала. Генератор 2 сигнала формирует сигналы, которые должны быть переданы, на основании данных, которые передатчик 1 должен передать. Данные являются, например, данными датчика или данными статуса самого передатчика 1.
В показанном варианте осуществления разбиение телеграммы используется так, что данные, которые должны быть выведены, распределяются по меньшей мере по двум сигналам, которые также могут упоминаться как фрагменты телеграммы. Каждый из отдельных фрагментов телеграммы имеет пилот–последовательность, которая обеспечивается генератором 2 сигнала. Обеспечение отдельных сигналов, которые должны быть переданы, таким образом в одной конфигурации состоит в том, что генератор 2 сигнала осуществляет доступ к памяти 4 данных, в которой хранятся данные для подходящей пилот–последовательности. Устройство 3 вывода сигнала передает отдельные фрагменты телеграммы.
Отдельные фрагменты телеграммы принимаются и обрабатываются приемником 10. Обработка требует синхронизации между передатчиком 1 и приемником 10, для которой предусмотрено устройство 11 синхронизации. Пилот–последовательности с их пилот–символами используются для синхронизации.
Синхронизация требуется относительно времени. Это относится к оценке временной позиции принятого сигнала и ассоциированного оптимального времени для выборки сигнала. Для данной синхронизации устройство 11 синхронизации соединяется с устройством 13 сканирования. Как правило нельзя повлиять на время выборки. Наоборот, момент времени необходим для воссоздания символа из обычно сигнала с избыточной выборкой или чтобы иметь возможность осуществления интерполяции в ином случае.
В показанном примере дополнительная синхронизация относится к частоте. Здесь уместны частота несущей, с которой сигналы передаются от передатчика 1, и центральная частота устройства 14 фильтра, с которой фильтруются принятые сигналы. В качестве альтернативы сигналы сдвигаются по частоте после приема перед фильтром. Разница между двумя частотами называется уходом частоты. Для частотной синхронизации устройство 14 фильтра здесь соединено с устройством 11 синхронизации.
За частотной синхронизацией следует – в случае когерентной демодуляции или декодирования – фазовая синхронизация. Для данной синхронизации устройство 12 оценки сигнала, которое описывается более подробно в нижеследующем, передает соответствующие данные синхронизации устройству 11 синхронизации.
Для того чтобы определить фазу предполагается, что каждый пилот–символ пилот–последовательности принятого сигнала сравнивается с соответствующим опорным символом опорной последовательности. Таким образом опорная последовательность является точно такой же как пилот–последовательность, которая используется передатчиком 1, чтобы формировать сигнал, или была вставлена в сигнал. Если значение фазы было определено для каждого пилот–символа, затем формируется общее значение, например, путем усреднения отдельных значений фазы. Опорные последовательности хранятся в памяти 15 данных.
Тем не менее, как объяснено выше, временная ошибка между окном устройства 14 фильтра и фактическим началом символа оказывает вредное влияние на определение фазы.
Из–за усреднения путем оценки нескольких символов подавления шума, также осуществляется усреднение по ошибкам относительно значения фазы. Вследствие этого, предполагается, что средняя фазовая ошибка будет использоваться для всех пилот–символов во время синхронизации. Для того чтобы гарантировать то, что средняя ошибка для усреднения по отдельным значением фазы в идеале является нулем, или по меньшей мере очень небольшой, зависимость фазовой ошибки символа от предыдущего и последующего символов учитывается на основе вышеупомянутых исследований. Таким образом символы выбираются так, что фазовые ошибки по временному смещению точно компенсируют друг друга при усреднении по отдельным значениям фаз, сформированным из расчета на символ.
Поскольку несколько пилот–символов передаются один за другим, то предыдущий и последующий символы (следовательно, символы, которые являются фланговыми для среднего символа или символа, рассматриваемого для оценки в примере на Фиг. 2) могут быть определены или известны приемнику. Для того чтобы компенсировать фазовую ошибку отдельных пилот–символов в общем, для каждого символа, в котором может возникнуть фазовая ошибка, передается второй, который имеет противоположную ошибку (при том же самом временном смещении). Это применяется здесь к символам сигнала, которые несут пилот–последовательность. В альтернативном исполнении, фазовые ошибки усредняются по пилот–подпоследовательностям нескольких сигналов, которые, в частности, являются фрагментами телеграммы.
Вследствие этого в одной конфигурации предусматривается, что длина пилот–последовательности кратна длине двух так, что создается четное число сложений для усреднения.
Результат иллюстрируется примером.
Если последовательность с Фиг. 2 является частью пилот–последовательности, то положительное фазовое смещение формируется при временном смещении, которое применяется как к положительным, так и отрицательным временным смещениям. Для того чтобы скорректировать данное смещение также должен быть передан символ, для которого ошибка на том же самом уровне указывает отрицательную фазовую ошибку.
Фиг. 11 показывает иллюстрацию модуляции MSK. Показаны возможные точки созвездия у MSK с предварительным кодированием (в MATLAB также известна как non–diff MSK).
Символы, которые должны быть переданы, делятся на группы из четырех символов, причем первый символ отправляется в момент времени T0. Соответственно точка созвездия +1+0j выбирается для двоичного нуля в момент времени T0, и точка созвездия –1+0j выбирается для двоичной единицы. Время T0 + ΔT выбирается для следующего символа. Таким образом точки созвездия приводят к 0+1j (двоичная единица) и 0–1j (двоичный ноль). Для следующих двух моментов времени точки созвездия вычисляются точно таким же образом. После того, как четыре символа были отображены в точках созвездия, начало опять находится в моменте времени T0.
Для длины пилот–последовательности из восьми символов и описанного выше правила отображения MSK получаются следующие последовательности, которые обладают как хорошей автокорреляцией, так и фазовой ошибкой близкой к нулю из–за временного смещения.
Вследствие этого пилот–последовательность, с которой передатчик 1 передает сигналы, определяется так, что сумма фазовых смещений минимизируется в случае временного смещения.
Для длины пилот–последовательности из двенадцати символов и описанного выше правила отображения MSK, были найдены следующие последовательности, как обладающие хорошей автокорреляцией и фазовой ошибкой близкой к нулю при временном смещении.
Таким образом нули и единицы являются битами пилот–последовательности, которые приводят к символам пилот–последовательности или пилот–подпоследовательности путем соответствующего отображения.
Значение |εν|max является максимальным систематическим отклонением оценки частоты с использованием корреляции, учитывая ошибку времени выборки от –0.25T до +0.25T и уход частоты у vT принятого сигнала между –0.05 и +0.05.
Фиг. 12 показывает полином второй степени формы y(x) = y0 – c(x–x0)2 v, поскольку он был описан в конфигурациях для улучшения оценки времени и/или частоты посредством интерполяции.
Несмотря на то, что аспекты были описаны в связи с устройством следует понимать, что эти аспекты также представляют собой описание соответствующего способа так, что блок или компонент устройства также следует понимать, как соответствующий этап способа или как признак этапа способа. Аналогично аспекты, описанные в связи с или как этап способа, также являются описанием соответствующего блока или подробности, или признака соответствующего устройства. Некоторые или все из этапов способов могут быть исполнены устройством аппаратного обеспечения (или с использованием устройства аппаратного обеспечения), такого как микропроцессор, программируемый компьютер или электронная схема. В некоторых вариантах осуществления некоторые или более из наиболее важных этапов способа могут быть исполнены таким устройством.
В зависимости от определенных требований к реализации варианты осуществления изобретения могут быть реализованы в аппаратном обеспечении или в программном обеспечении или, по меньшей мере, частично в аппаратном обеспечении или по меньшей мере частично в программном обеспечении. Реализация может быть выполнена с использованием цифрового запоминающего носителя информации, такого как гибкий диск, DVD, диск BluRay, CD, ROM, PROM, EPROM, EEPROM или флэш–память, жесткий диск, или другая магнитная или оптическая память, в которой хранятся электронно–читаемые сигналы управления, которые могут взаимодействовать или взаимодействуют с программируемой компьютерной системой, чтобы выполнять соответствующий способ. Вследствие этого цифровой запоминающий носитель информации может быть машиночитаемым.
Некоторые варианты осуществления в соответствии с изобретением, таким образом, включают в себя носитель данных, содержащий электронно–читаемые сигналы управления, выполненные с возможностью взаимодействия с программируемой компьютерной системой так, что выполняется один из способов, описанных в данном документе.
В целом варианты осуществления настоящего изобретения могут быть реализованы в качестве компьютерного программного продукта с программным кодом, причем программный код эффективен для выполнения одного из способов, когда компьютерный программный продукт выполняется на компьютере.
Программный код может, например, также быть сохранен на машиночитаемом носителе.
Другие варианты осуществления включают в себя компьютерную программу для выполнения любого из способов, описанных в данном документе, при этом компьютерная программа хранится на машиночитаемом носителе информации. Другими словами, вариант осуществления способа изобретения является таким образом компьютерной программой, которая включает в себя программный код для выполнения одного из способов, описанных в этом документе, когда компьютерная программа выполняется на компьютере.
Дополнительным вариантом осуществления способов изобретения является таким образом носитель данных (или цифровой запоминающий носитель информации или машиночитаемый носитель информации) на котором записана компьютерная программа для реализации одного из способов, описанных в данном документе. Носитель данных или цифровой запоминающий носитель информации или машиночитаемый носитель информации является как правило вещественным и/или не временным.
Дополнительным вариантом осуществления способа изобретения является таким образом поток данных или последовательность сигналов, которая представляет собой компьютерную программу для исполнения одного из способов, описанных в данном документе. Поток данных или последовательность сигналов могут, например, быть выполнены с возможностью переноса через линию связи для передачи данных, например, через Интернет.
Дополнительный вариант осуществления включает в себя устройство обработки, такое как компьютер или программируемое логическое устройство, выполненное с возможностью или адаптированное для выполнения любого из способов, описанных в данном документе.
Другой вариант осуществления включает в себя компьютер, на котором инсталлирована компьютерная программа для выполнения одного из способов, описанных в данном документе.
Дополнительный вариант осуществления в соответствии с изобретением содержит устройство или систему, выполненные с возможностью передачи компьютерной программы приемнику для исполнения по меньшей мере одного из способов, описанных в данном документе. Передача может быть выполнена электронным образом или оптическим образом, например. Например, приемник может быть компьютером, мобильным устройством, запоминающим устройством или аналогичным устройством. Например, устройство или система могут включать в себя файловый сервер для передачи компьютерной программы приемнику.
В некоторых вариантах осуществления программируемое логическое устройство (такое как программируемая вентильная матрица, FPGA) может быть использовано, чтобы выполнять некоторые или все из функциональных возможностей способов, описанных в данном документе. В некоторых вариантах осуществления программируемая вентильная матрица может взаимодействовать с микропроцессором, чтобы выполнять один из способов, описанных в данном документе. В целом в некоторых вариантах осуществления способы исполняются любым устройством аппаратного обеспечения. Это может быть универсальным аппаратным обеспечением, таким как компьютерный процессор (CPU), или аппаратным обеспечением особым для процесса, таким как ASIC, или микропроцессором, таким как с архитектурой ARM.
Варианты осуществления, описанные выше, являются лишь иллюстрацией принципов данного изобретения. Само собой разумеется, что модификации и вариации компоновок и подробностей, описанных в данном документе, будут понятны специалистам в соответствующей области техники. Вследствие этого, предполагается, что изобретение ограничивается только объемом правовой защиты формулы изобретения ниже, а не особыми подробностями, представленными в данном документе в описании и объяснении вариантов осуществления.
Список цитированной литературы
[1] Z. Y. Choi и Y. H. Lee, «Frame synchronization in the presence of frequency offset», Communications, IEEE Transactions on, том 50, номер 7, стр. 1062–1065, 2002 г.
[2] Sust, M.K. ; Kaufmann, R. F. ; Molitor, F. ; Bjornstrom, G.A.: Rapid acquisition concept for voice activated CDMA communication. В документе: IEEE Global Telecommunications Conference, 1990 Том. 3, 1990 г., стр. 1820–1826.
[3] Международная заявка на патент «Optimized Preamble and Methods for Interference Robust Packet Detection for Telemetry Applications» (PCT/EP2016/057014).
[4] G. Kilian, H. Petkov, R. Psiuk, H. Lieske, F. Beer, J. Robert, и A. Heuberger, «Improved coverage for low–power telemetry systems using telegram splitting», в документе Proceedings of 2013 European Conference on Smart Objects, Systems and Technologies (SmartSysTech), 2013 г.
[5] G. Kilian, M. Breiling, H. H. Petkov, H. Lieske, F. Beer, J. Robert, и A. Heuberger, «Increasing Transmission Reliability for Telemetry Systems Using Telegram Splitting», IEEE Transactions on Communications, том 63, номер 3, стр. 949–961, март 2015 г.
[6] Wolfgang Koch, Сценарий семинара «Empfangersynchronisation (Receiver Synchronization)» на Fraunhofer IIS, 10.06.2015–15.06.2015.
[7] Uwe Lambrette, Ralf Mehlan и Heinrich Meyr, Comparison of Demodulation Techniques for MSK, RWTH Aachen, https://www.ice.rwth–aachen.de/fileadmin/publications/Lambrette95TIRR.pdf, последний раз найдено: 19.09.2016.
[8] Kay, Steven M.: Fundamentals of Statistical Signal Processing: Detection theory. Upper Saddle River, NJ : Prentice Hall PTR, 1998 г. ISBN 9780135041352.
[9] Umberto Mengali, Aldo N. D'Andrea: «Synchronization Techniques for Digital Receivers» Plenum Press, 1997 г., ISBN 0–306–45725–3.
[10] Walter Kellermann: «Digital Signal Processing», конспект лекций WS 2016/17, Chair in Multimedia Communication and Signal Processing (LMS) в Friedrich–Alexander–University Erlangen–Nuremberg.
[11] Steven M. Kay: «Fundamentals of Statistical Signal Processing – Vol. 2: Detection Theory», Prentice Hall, 1998 г. ISBN: 0–13–345711–7.
[12] Z. Y. Choi и Y. H. Lee, «Frame synchronization in the presence of frequency offset», IEEE Transactions on Communications, том 50, номер 7, стр. 1062–1065, 2002 г.
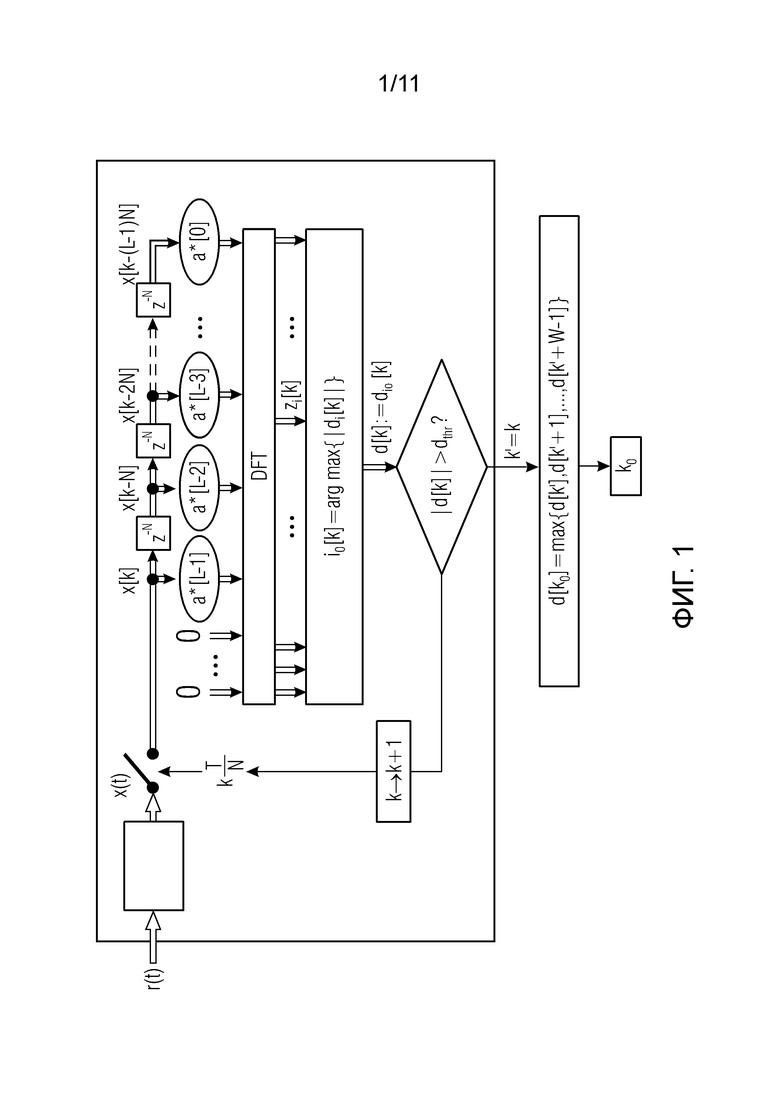
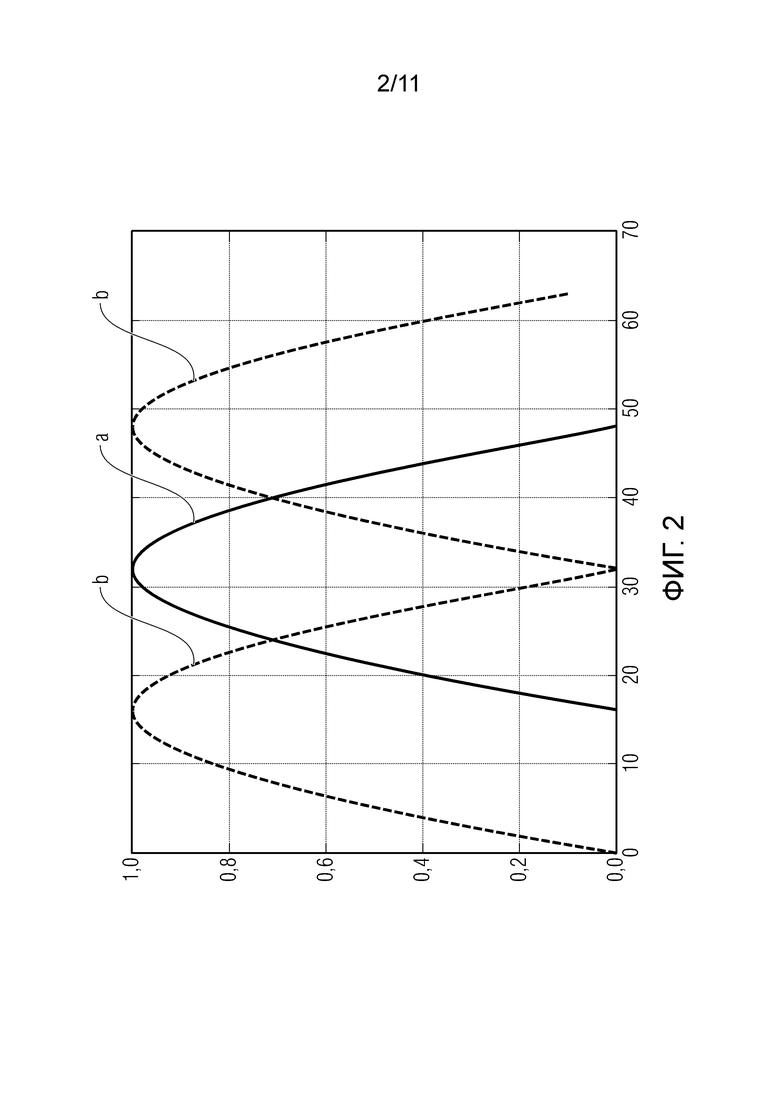

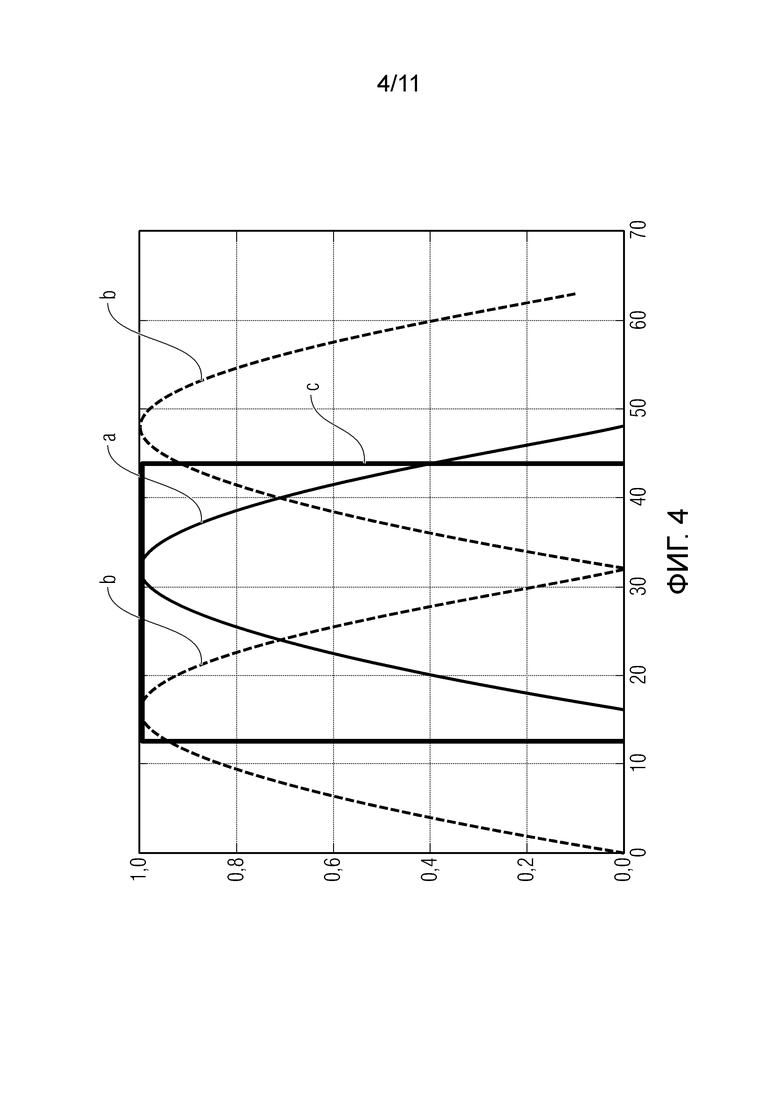
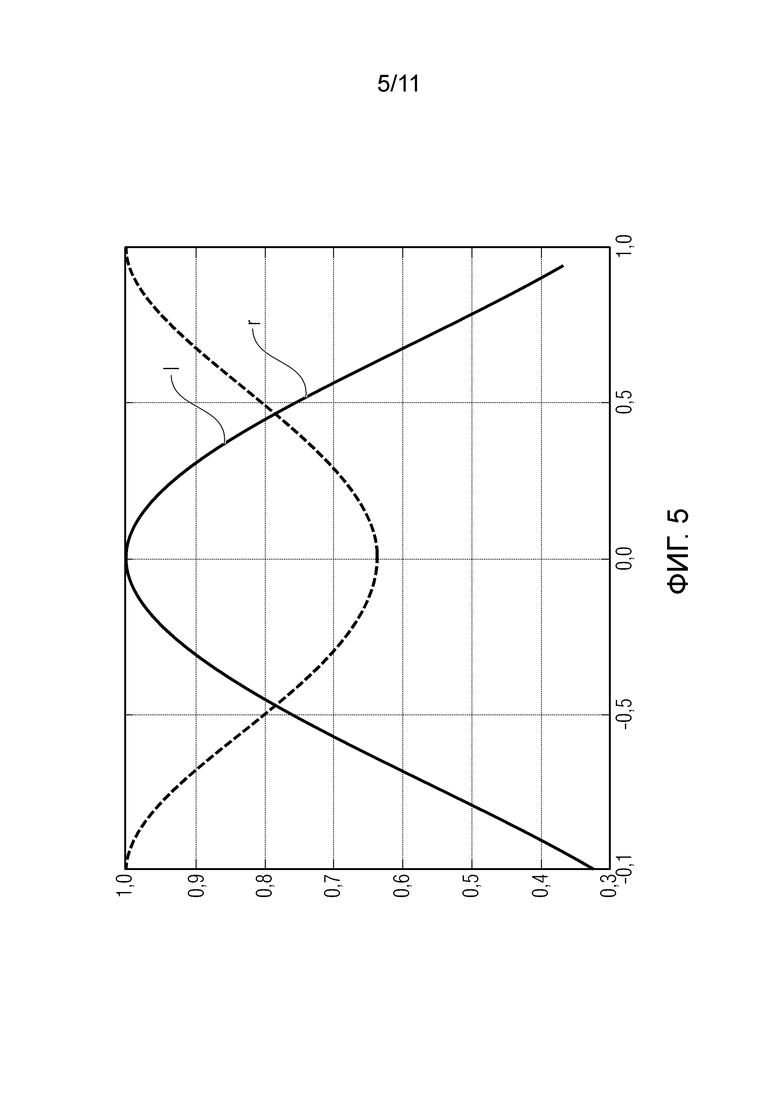
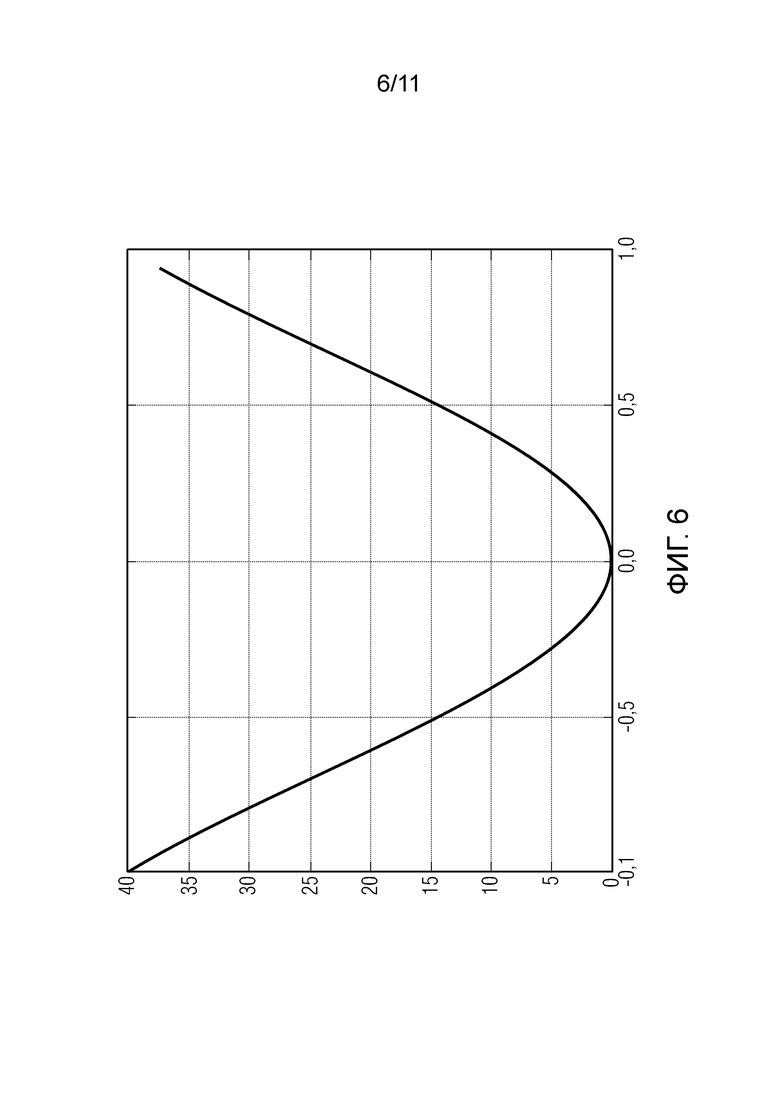
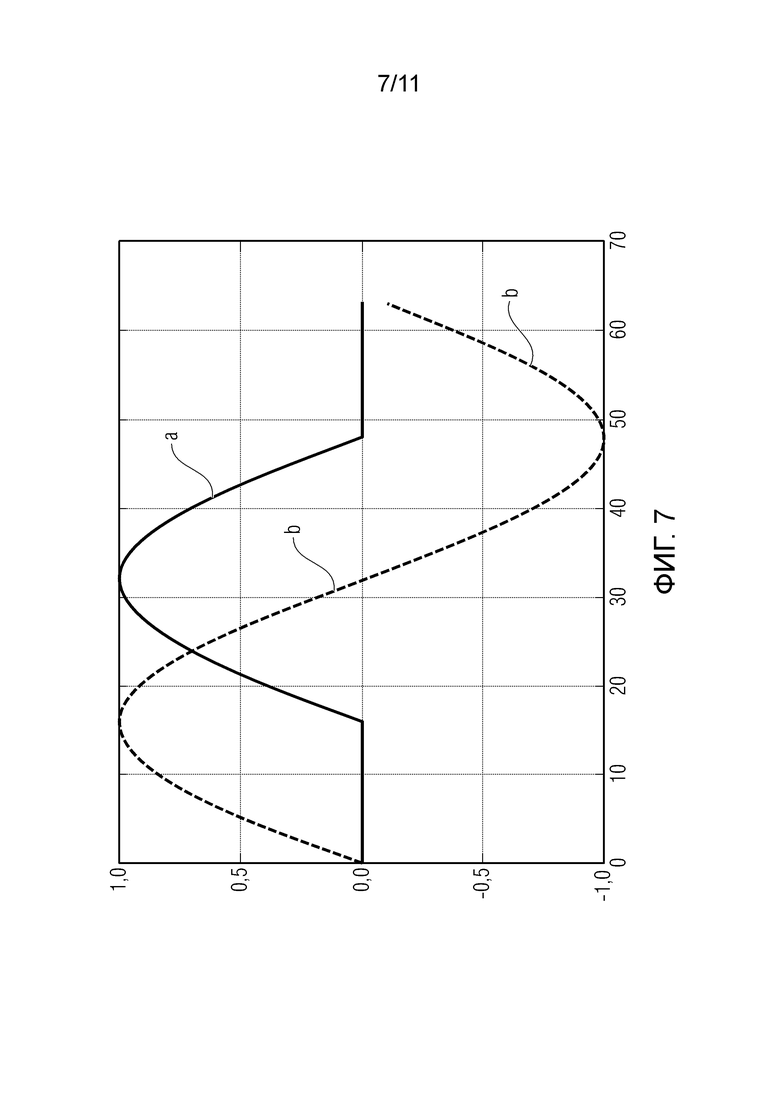
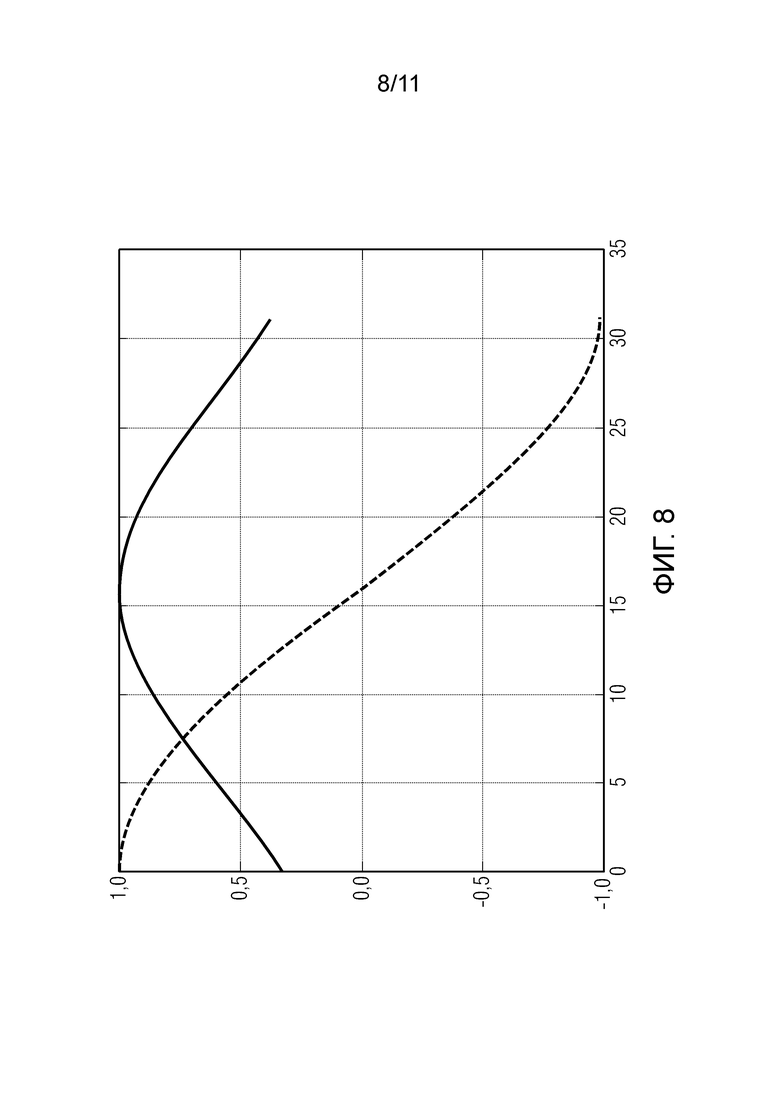
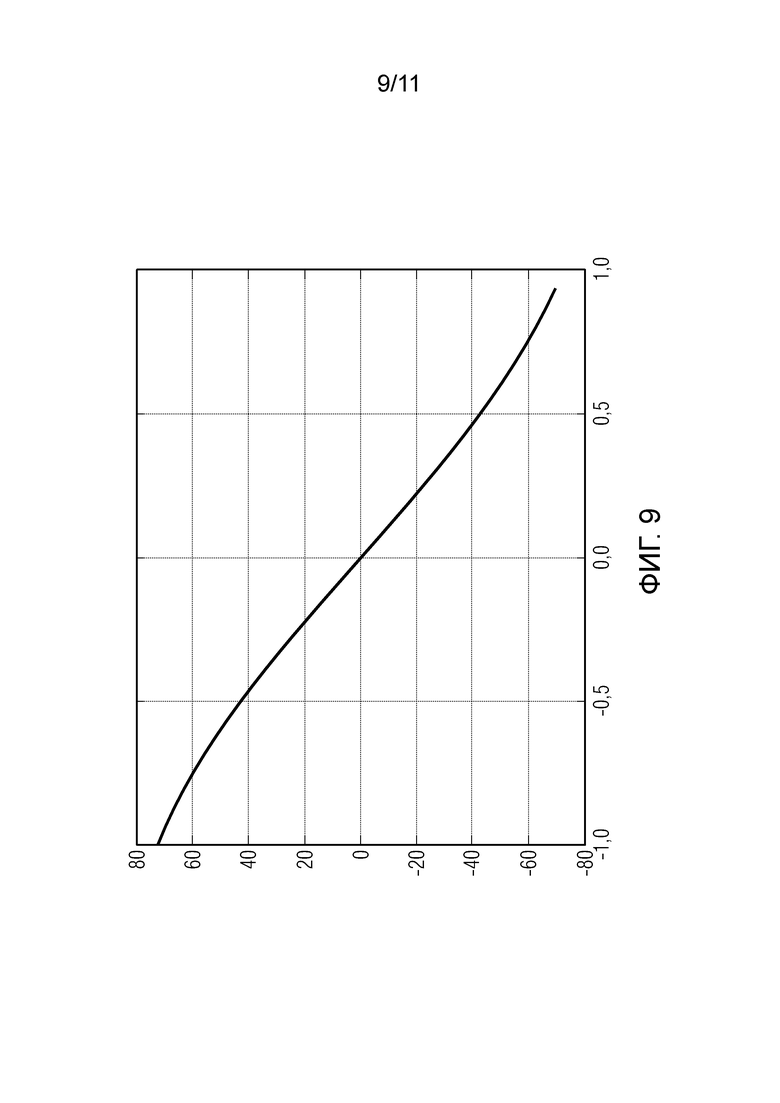
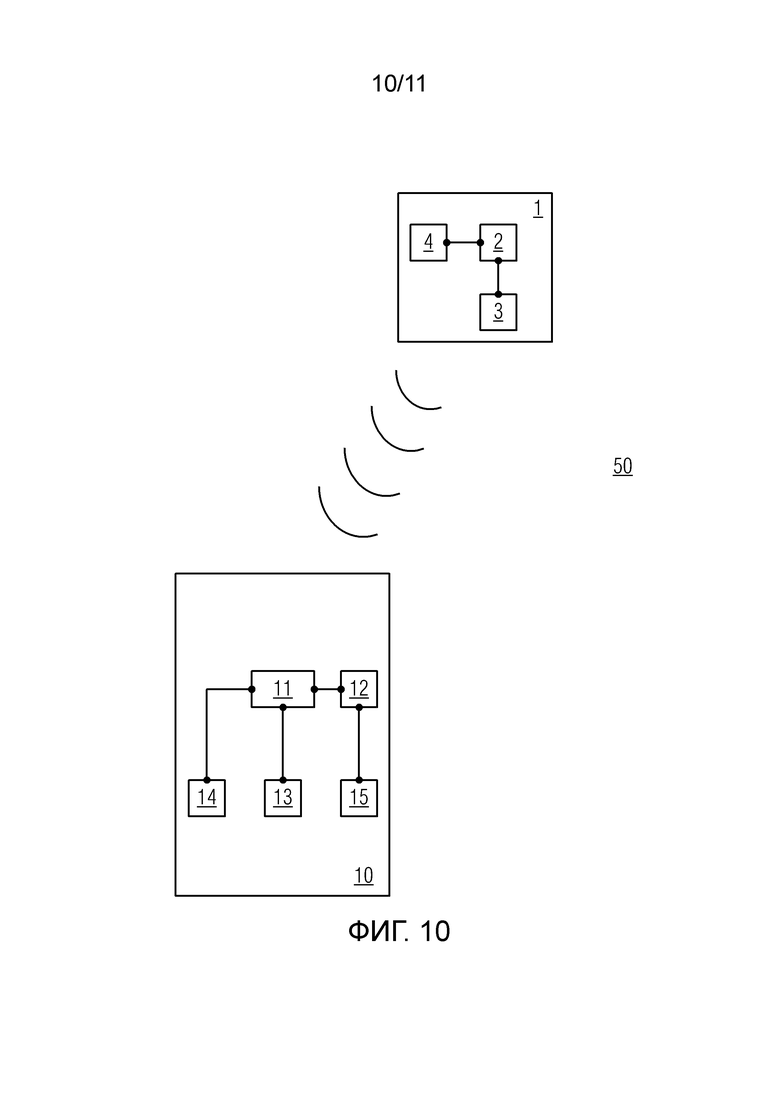
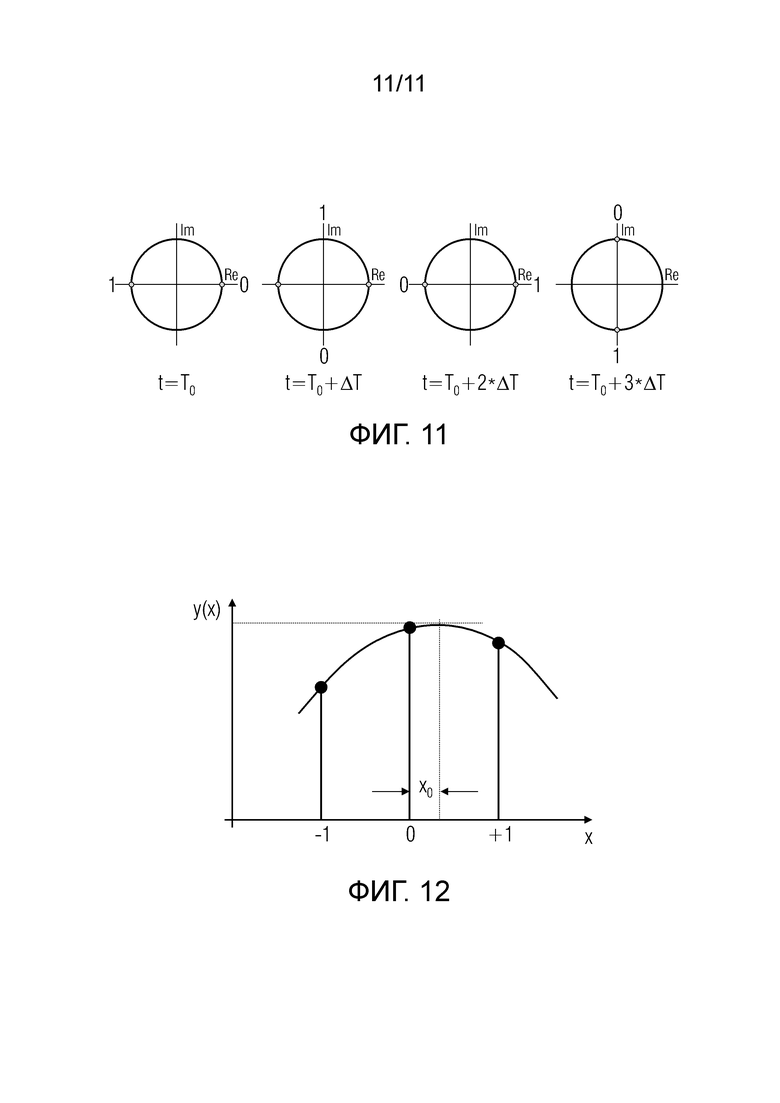
Изобретение относится к беспроводной связи и может быть использовано для передачи сигналов или для синхронизации приемника посредством передатчика. Передатчик выполнен с возможностью передачи по меньшей мере одного сигнала с пилот-последовательностью, содержащей множество пилот-символов, при этом передатчик содержит генератор сигнала, при этом генератор сигнала обеспечивает пилот-последовательность, при этом генератор сигнала обеспечивает пилот-последовательность так, что пилот-последовательность содержит по меньшей мере две группы символов, причем каждая содержит по меньшей мере два пилот-символа, и группы символов, при оценке сигнала, принятого приемником в результате передачи сигнала, в отношении фазы, группы символов формируют фазовые ошибки, которые зависят от временного смещения между опорным моментом времени передачи сигнала передатчиком и значением, которое предполагается и/или оценивается при оценке для опорного момента времени, причем упомянутые фазовые ошибки по существу взаимно компенсируют друг друга по группам символов при оценке. Технический результат - повышение эффективности синхронизации. 10 н. и 4 з.п. ф-лы, 12 ил.
1. Передатчик (1),
при этом передатчик (1) выполнен с возможностью передачи по меньшей мере одного сигнала с пилот-последовательностью, содержащей несколько пилот-символов,
при этом передатчик (1) содержит генератор (2) сигнала,
при этом генератор (2) сигнала обеспечивает пилот-последовательность,
при этом генератор (2) сигнала обеспечивает пилот-последовательность так, что пилот-последовательность содержит по меньшей мере две группы символов, причем каждая с по меньшей мере двумя пилот-символами, и
при этом при оценке сигнала, принятого приемником (10) в результате передачи сигнала, в отношении фазы, группы символов формируют фазовые ошибки, которые зависят от временного смещения между опорным моментом времени передачи сигнала передатчиком (1) и значением, которое предполагается и/или оценивается при оценке для опорного момента времени, причем упомянутые фазовые ошибки по существу взаимно компенсируют друг друга по группам символов при оценке,
при этом генератор (2) сигнала обеспечивает пилот-последовательность с длиной по меньшей мере в восемь или двенадцать пилот-символов так, что пилот-последовательность или участок пилот-последовательности, который формирует часть пилот-последовательности один или несколько раз, имеют одну из следующих форм:
[0, 1, 0, 0, 0, 0, 1, 0],
[1, 0, 1, 1, 1, 1, 0, 1],
[0, 0, 0, 1, 0, 1, 1, 1],
[1, 1, 1, 0, 1, 0, 0, 0],
[0, 0, 0, 0, 0, 1, 1, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 1, 0, 0, 1, 1, 1, 1],
[0, 0, 0, 1, 0, 1, 1, 1, 1, 0, 1, 1],
[0, 0, 0, 1, 1, 0, 1, 0, 1, 1, 1, 1],
[0, 1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0],
[0, 1, 0, 0, 1, 1, 1, 1, 1, 0, 1, 0],
[0, 1, 0, 1, 0, 0, 1, 1, 1, 1, 1, 0],
[0, 1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0],
[0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0],
[0, 1, 1, 1, 1, 0, 1, 0, 0, 0, 1, 0],
[1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 0, 0, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 0, 1, 1, 0, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 0, 0, 0, 0, 0, 1, 0, 1],
[1, 0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0, 1],
[1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 0, 1, 0, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 1, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0],
[1, 1, 1, 1, 1, 0, 0, 1, 0, 1, 0, 0] или
[1, 1, 1, 1, 1, 0, 1, 0, 1, 1, 0, 0],
при этом каждое из нулей и единиц является битами пилот-последовательности до модуляции.
2. Передатчик (1) по п. 1, при этом передатчик (1) передает сигналы, содержащие пилот-последовательности, полученные в результате модуляции MSK или модуляции GMSK.
3. Передатчик (1),
при этом передатчик (1) выполнен с возможностью передачи по меньшей мере двух сигналов, причем каждый содержит пилот-подпоследовательность с множеством пилот-символов,
при этом передатчик (1) содержит генератор (2) сигнала,
при этом генератор (2) сигнала обеспечивает пилот-подпоследовательность,
при этом генератор (2) сигнала обеспечивает пилот-подпоследовательности сигналов так, что каждая из пилот-подпоследовательностей имеет по меньшей мере одну группу символов по меньшей мере с двумя пилот-символами, и
при этом группы символов сигналов формирует фазовые ошибки, которые зависят от временного смещения между опорным моментом времени соответствующей передачи сигнала и значением, которое предполагается и/или оценивается при оценке для опорного момента времени во время оценки сигналов, принятых приемником (10) в результате передачи сигналов, в отношении фазы, причем упомянутые фазовые ошибки по существу компенсируют друг друга во время оценки совместно по сигналам,
при этом генератор (2) сигнала обеспечивает пилот-подпоследовательности так, что пилот-подпоследовательности вместе содержат участок, который присутствует в однократной или многократной форме и имеет следующие формы:
[0, 1, 0, 0, 0, 0, 1, 0],
[1, 0, 1, 1, 1, 1, 0, 1],
[0, 0, 0, 1, 0, 1, 1, 1] или
[1, 1, 1, 0, 1, 0, 0, 0],
[0, 0, 0, 0, 0, 1, 1, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 1, 0, 0, 1, 1, 1, 1],
[0, 0, 0, 1, 0, 1, 1, 1, 1, 0, 1, 1],
[0, 0, 0, 1, 1, 0, 1, 0, 1, 1, 1, 1],
[0, 1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0],
[0, 1, 0, 0, 1, 1, 1, 1, 1, 0, 1, 0],
[0, 1, 0, 1, 0, 0, 1, 1, 1, 1, 1, 0],
[0, 1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0],
[0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0],
[0, 1, 1, 1, 1, 0, 1, 0, 0, 0, 1, 0],
[1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 0, 0, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 0, 1, 1, 0, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 0, 0, 0, 0, 0, 1, 0, 1],
[1, 0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0, 1],
[1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 0, 1, 0, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 1, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0],
[1, 1, 1, 1, 1, 0, 0, 1, 0, 1, 0, 0] или
[1, 1, 1, 1, 1, 0, 1, 0, 1, 1, 0, 0],
при этом каждое из нулей и единиц является битами пилот-последовательности до модуляции.
4. Передатчик (1) по п. 3, при этом передатчик (1) передает сигналы, содержащие пилот-подпоследовательности, полученные в результате модуляции MSK или модуляции GMSK.
5. Способ для передачи сигналов,
в котором сигналы передаются с пилот-последовательностью, причем каждая содержит множество символов пилот-последовательности,
при этом пилот-последовательности обеспечиваются так, что каждая из пилот-последовательностей содержит по меньшей мере две группы символов, причем каждая с по меньшей мере двумя пилот-символами, и
при этом группы символов во время оценки сигнала, принятого приемником (10) в результате передачи сигнала, в отношении фазы от временного смещения между опорным моментом времени передачи сигнала и значением, которое предполагается и/или оценивается при оценке для опорного момента времени, формируют зависимые фазовые ошибки, которые по существу компенсируют друг друга во время оценки по группам символов,
при этом генератор (2) сигнала обеспечивает пилот-последовательность с длиной по меньшей мере в восемь или двенадцать пилот-символов так, что пилот-последовательность или участок пилот-последовательности, который формирует часть пилот-последовательности один или несколько раз, имеют одну из следующих форм:
[0, 1, 0, 0, 0, 0, 1, 0],
[1, 0, 1, 1, 1, 1, 0, 1],
[0, 0, 0, 1, 0, 1, 1, 1] или
[1, 1, 1, 0, 1, 0, 0, 0],
[0, 0, 0, 0, 0, 1, 1, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 1, 0, 0, 1, 1, 1, 1],
[0, 0, 0, 1, 0, 1, 1, 1, 1, 0, 1, 1],
[0, 0, 0, 1, 1, 0, 1, 0, 1, 1, 1, 1],
[0, 1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0],
[0, 1, 0, 0, 1, 1, 1, 1, 1, 0, 1, 0],
[0, 1, 0, 1, 0, 0, 1, 1, 1, 1, 1, 0],
[0, 1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0],
[0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0],
[0, 1, 1, 1, 1, 0, 1, 0, 0, 0, 1, 0],
[1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 0, 0, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 0, 1, 1, 0, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 0, 0, 0, 0, 0, 1, 0, 1],
[1, 0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0, 1],
[1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 0, 1, 0, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 1, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0],
[1, 1, 1, 1, 1, 0, 0, 1, 0, 1, 0, 0] или
[1, 1, 1, 1, 1, 0, 1, 0, 1, 1, 0, 0],
при этом каждое из нулей и единиц является битами пилот-последовательности до модуляции.
6. Способ для передачи сигналов,
в котором передаются по меньшей мере два сигнала, причем каждый с пилот-подпоследовательностью, содержащей множество символов пилот-последовательности,
при этом пилот-подпоследовательности обеспечиваются так, что каждая пилот-подпоследовательность содержит по меньшей мере одну группу символов по меньшей мере с двумя пилот-символами, и
при этом группы символов во время оценки сигнала, принятого приемником (10) в результате передачи сигналов, в отношении фазы от временного смещения между опорным моментом времени передачи сигнала и значением, которое предполагается и/или оценивается при оценке для опорного момента времени, формируют зависимые фазовые ошибки, которые по существу компенсируют друг друга во время оценки по сигналам,
при этом генератор (2) сигнала обеспечивает пилот-подпоследовательности так, что пилот-подпоследовательности вместе содержат участок, который присутствует в однократной или многократной форме и имеет следующие формы:
[0, 1, 0, 0, 0, 0, 1, 0],
[1, 0, 1, 1, 1, 1, 0, 1],
[0, 0, 0, 1, 0, 1, 1, 1] или
[1, 1, 1, 0, 1, 0, 0, 0],
[0, 0, 0, 0, 0, 1, 1, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 1, 0, 0, 1, 1, 1, 1],
[0, 0, 0, 1, 0, 1, 1, 1, 1, 0, 1, 1],
[0, 0, 0, 1, 1, 0, 1, 0, 1, 1, 1, 1],
[0, 1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0],
[0, 1, 0, 0, 1, 1, 1, 1, 1, 0, 1, 0],
[0, 1, 0, 1, 0, 0, 1, 1, 1, 1, 1, 0],
[0, 1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0],
[0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0],
[0, 1, 1, 1, 1, 0, 1, 0, 0, 0, 1, 0],
[1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 0, 0, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 0, 1, 1, 0, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 0, 0, 0, 0, 0, 1, 0, 1],
[1, 0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0, 1],
[1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 0, 1, 0, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 1, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0],
[1, 1, 1, 1, 1, 0, 0, 1, 0, 1, 0, 0] или
[1, 1, 1, 1, 1, 0, 1, 0, 1, 1, 0, 0],
при этом каждое из нулей и единиц является битами пилот-последовательности до модуляции.
7. Машиночитаемый запоминающий носитель информации, содержащий программный код для исполнения способа по п. 5 или 6.
8. Передатчик (1),
при этом передатчик (1) выполнен с возможностью передачи по меньшей мере одного сигнала с пилот-последовательностью, содержащей несколько пилот-символов,
при этом передатчик (1) содержит генератор сигнала, который обеспечивает пилот-последовательность,
при этом генератор сигнала обеспечивает пилот-последовательность с длиной по меньшей мере в двенадцать пилот-символов так, что пилот-последовательность имеет одну из следующих форм, или так, что участок пилот-последовательности, который формирует часть пилот-последовательности один или несколько раз, имеют одну из следующих форм:
[0, 0, 0, 0, 0, 1, 1, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 1, 0, 0, 1, 1, 1, 1],
[0, 0, 0, 1, 0, 1, 1, 1, 1, 0, 1, 1],
[0, 0, 0, 1, 1, 0, 1, 0, 1, 1, 1, 1],
[0, 1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0],
[0, 1, 0, 0, 1, 1, 1, 1, 1, 0, 1, 0],
[0, 1, 0, 1, 0, 0, 1, 1, 1, 1, 1, 0],
[0, 1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0],
[0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0],
[0, 1, 1, 1, 1, 0, 1, 0, 0, 0, 1, 0],
[1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 0, 0, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 0, 1, 1, 0, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 0, 0, 0, 0, 0, 1, 0, 1],
[1, 0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0, 1],
[1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 0, 1, 0, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 1, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0],
[1, 1, 1, 1, 1, 0, 0, 1, 0, 1, 0, 0] или
[1, 1, 1, 1, 1, 0, 1, 0, 1, 1, 0, 0],
при этом каждое из нулей и единиц является битами пилот-последовательности до модуляции.
9. Передатчик (1) по п. 8,
в котором пилот-подпоследовательность получается в результате модуляции MSK или модуляции GMSK.
10. Передатчик (1),
при этом передатчик (1) выполнен с возможностью передачи по меньшей мере одного сигнала с пилот-последовательностью, содержащей несколько пилот-символов,
при этом передатчик (1) содержит генератор сигнала, который обеспечивает пилот-последовательность,
при этом генератор сигнала обеспечивает пилот-последовательность с длиной по меньшей мере в восемь пилот-символов так, что пилот-последовательность имеет одну из следующих форм, или так, что участок пилот-последовательности, который формирует часть пилот-последовательности один или несколько раз, имеют одну из следующих форм:
[0, 1, 0, 0, 0, 0, 1, 0],
[1, 0, 1, 1, 1, 1, 0, 1],
[0, 0, 0, 1, 0, 1, 1, 1] или
[1, 1, 1, 0, 1, 0, 0, 0],
при этом каждое из нулей и единиц является битами пилот-последовательности до модуляции.
11. Передатчик (1) по п. 10,
в котором пилот-подпоследовательность получается в результате модуляции MSK или модуляции GMSK.
12. Способ для передачи сигналов,
при этом передается по меньшей мере один сигнал с пилот-последовательностью, с несколькими пилот-символами,
при этом обеспечивается пилот-последовательность,
при этом пилот-последовательность с длиной по меньшей мере в двенадцать пилот-символов обеспечивается так, что пилот-последовательность имеет одну из следующих форм, или так, что участок пилот-последовательности, который формирует часть пилот-последовательности один или несколько раз, имеют одну из следующих форм:
[0, 0, 0, 0, 0, 1, 1, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 1, 1],
[0, 0, 0, 1, 0, 1, 0, 0, 1, 1, 1, 1],
[0, 0, 0, 1, 0, 1, 1, 1, 1, 0, 1, 1],
[0, 0, 0, 1, 1, 0, 1, 0, 1, 1, 1, 1],
[0, 1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0],
[0, 1, 0, 0, 1, 1, 1, 1, 1, 0, 1, 0],
[0, 1, 0, 1, 0, 0, 1, 1, 1, 1, 1, 0],
[0, 1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0],
[0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0],
[0, 1, 1, 1, 1, 0, 1, 0, 0, 0, 1, 0],
[1, 0, 0, 0, 0, 1, 0, 1, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 0, 0, 1, 1, 0, 1],
[1, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 0, 1, 1, 0, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 0, 0, 0, 0, 0, 1, 0, 1],
[1, 0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1],
[1, 0, 1, 1, 1, 1, 1, 0, 0, 1, 0, 1],
[1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 0, 1, 0, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0, 0],
[1, 1, 1, 0, 1, 0, 0, 0, 1, 0, 0, 0],
[1, 1, 1, 0, 1, 0, 1, 1, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 1, 1, 1, 0, 1, 0, 0],
[1, 1, 1, 1, 1, 0, 0, 1, 0, 1, 0, 0] или
[1, 1, 1, 1, 1, 0, 1, 0, 1, 1, 0, 0],
при этом каждое из нулей и единиц является битами пилот-последовательности до модуляции.
13. Способ для передачи сигналов,
при этом передается по меньшей мере один сигнал с пилот-последовательностью, с несколькими пилот-символами,
при этом обеспечивается пилот-последовательность,
при этом пилот-последовательность с длиной по меньшей мере в восемь пилот-символов обеспечивается так, что пилот-последовательность имеет одну из следующих форм, или так, что участок пилот-последовательности, который формирует часть пилот-последовательности один или несколько раз, имеют одну из следующих форм:
[0, 1, 0, 0, 0, 0, 1, 0],
[1, 0, 1, 1, 1, 1, 0, 1],
[0, 0, 0, 1, 0, 1, 1, 1] или
[1, 1, 1, 0, 1, 0, 0, 0],
при этом каждое из нулей и единиц является битами пилот-последовательности до модуляции.
14. Машиночитаемый запоминающий носитель информации, содержащий программный код для осуществления способа по п. 12 или 13.
| EP 2914039 A1, 02.09.2015 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| ИСПОЛЬЗОВАНИЕ ФОРМАТА ПОЛЯ В УСТРОЙСТВЕ СВЯЗИ | 2011 |
|
RU2549146C2 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

