Изобретение относится к передатчику, а также к приемнику, и соответствующим способам, для передачи и приема сигналов.
Во многих системах передачи данных пилот–последовательности (также упоминаются как обучающие последовательности или последовательности синхронизации) вставляются в потоки данных, которые должны быть переданы, для обнаружения сигнала или оценки параметра. Это может быть как передачей непрерывного потока данных, при которой пилот–последовательности разбросаны с некоторыми интервалами, так и пакетно–ориентированной передачей, при которой каждый пакет (также упоминаемый как телеграмма) обычно содержит ровно одну пилот–последовательность. Пилот–последовательность также называется преамбулой или мидамбулой, если она располагается в начале или в середине пакета. Однако, пилот–последовательность также может быть распределена внутри пакета в форме двух или более подпоследовательностей.
В телеметрических системах, сенсорных сетях и приложениях под ключевым словом Интернет Вещей (IoT) обычно асинхронная передача пакета происходит с длинными паузами передачи между пакетами.
При асинхронной передаче пакета передатчик и приемник не синхронизированы, т.е. приемник не знает временные слоты передачи отдельных пакетов данных. Чтобы не пропустить пакет в течение всего времени ожидания приема, он должен непрерывно проверять свой сигнал приема на присутствие пакета и оценивать его временную позицию с некоторой точностью.
Омрачает эту ситуацию то, что фактическая частота несущей сигнала передачи может значительно отклоняться от номинальной частоты и меняться со временем. Центральная частота фильтра приема также может отклоняться от номинальной частоты. С точки зрения приемника разность частот между частотой несущей сигнала передачи и центральной частотой фильтра приема – далее упоминаемая как уход частоты – является решающей. Для обнаружения данных оценка мгновенного ухода частоты и, в случае способов когерентного обнаружения, также требуется оценка фазы.
В общей сложности две темы должны быть обработаны приемником:
1. Обнаружение: идентификация пакета и, по меньшей мере, грубая оценка его временной позиции, при необходимости также учитывается спектральная позиция.
2. Синхронизация, состоящая из
– временной синхронизации: оценка точной временной позиции пакета,
– частотная синхронизация: оценка и коррекция ухода частоты, и
– фазовая синхронизация: оценка фазы после того, как имела место коррекция частоты.
При использовании асинхронной системы необходимо выполнять обнаружение телеграмм посредством пилот–последовательности. Приемник должен непрерывно осуществлять поиск по своему сигналу приема в отношении того, была ли узлом–датчиком передана телеграмма. Принятие решения приемником в отношении того, был ли сигнал приема вызван шумом или сигналом передачи, упоминается как обнаружение телеграммы или, коротко, только как обнаружение. С этой целью данным, которые должны быть переданы, как правило предшествует пилот–последовательность (часто упоминается как «маркеры» в английской литературе) с фиксировано определенными пилот–символами.
Цель, лежащая в основе изобретения, состоит в том, чтобы предложить передатчик и приемник, которые используют пилот–последовательности для передачи данных и которые упрощают обнаружение и/или обработку пилот–последовательностей.
Цель достигается посредством передатчика.
Передатчик выполнен с возможностью передачи каждого из сигналов с пилот–последовательностью, которая содержит несколько символов пилот–последовательности. Передатчик включает в себя генератор сигнала. Генератор сигнала обеспечивает пилот–последовательность, которая начинается с базовой последовательности, содержащей по меньшей мере один символ базовой последовательности. В частности, генератор сигнала обеспечивает символы пилот–последовательности, которые начинаются с символа базовой последовательности, последовательно повторенного (R–1) раз, при этом R является натуральным числом, которое больше или равно двум.
В одной конфигурации генератор сигнала обеспечивает пилот–последовательность, которая начинается с базовой последовательности с несколькими символами базовой последовательности.
Таким образом передатчик передает сигналы, каждый из которых содержит пилот–последовательность. Пилот–последовательности имеют несколько символов пилот–последовательности. Посредством этого генератор сигнала обеспечивает соответствующую пилот–последовательность, которая начинается с базовой последовательности, которая имеет по меньшей мере один символ базовой последовательности. Это включает в себя, например, обращение к сохраненным пилот–последовательностям или формирование пилот–последовательности, которая начинается с базовой последовательности. Обеспечение также включает в себя, например, формирование символов сигнала, который должен быть передан, в зависимости от отображения, например, MSK.
Символ базовой последовательности последовательно повторяется в пилот–последовательности (R–1) раз так, что символ базовой последовательности присутствует R раз. Соответственно символы базовой последовательности в пилот–последовательности последовательно повторяются (R–1) раз так, что каждый символ базовой последовательности присутствует R раз. Это означает, что достаточно того, что только каждый Rый символ на стороне приемника записывается и оценивается для обнаружения. Это приводит к суммарной требуемой длине пилот–последовательности в виде числа символов пилот–последовательности и в то же время уменьшает затраты на первоначальную оценку принятого сигнала. Это означает, что оптимизированные пилот–последовательности доступны для оптимизированного по вычислениям обнаружения посредством подвыборки на стороне приемника.
Последовательность из присутствующих R–кратно в каждом случае символов базовой последовательно (в некоторых конфигурациях возможны дополнительные символы) отображается в одной конфигурации с помощью алфавита модуляции. В одной конфигурации используется способ цифровой модуляции. В одном варианте, например, это двоичная фазовая манипуляция (двоичная PSK, BPSK). Например, двоичная 1 отображается в +1, а двоичный 0 в –1. Если, например, дана базовая последовательность с символами 0110, то простое повторение приводит к последовательности символов 00111100. После BPSK это приводит к символам: [–1, –1, +1, +1, +1, +1, –1, –1].
В одной конфигурации генератор сигнала формирует по меньшей мере один блок символов в пилот–последовательности, который включает в себя по меньшей мере один символ базовой последовательности и его (R–1) повторения.
В одной конфигурации генератор сигнала обеспечивает пилот–последовательность, которая начинается с базовой последовательности, содержащей несколько символов базовой последовательности, и обеспечивает блоки символов в пилот–последовательности, причем каждый содержит символ базовой последовательности и его повторения. Кроме того, генератор сигнала обеспечивает пилот–последовательность так, что блоки символов из символов базовой последовательности непосредственно следуют друг за другом в очередности символов базовой последовательности внутри базовой последовательности. В данной конфигурации R–кратные символы базовой последовательности в пилот–последовательности упоминаются как блоки символов, которые появляются в той же очередности в пилот–последовательности, которую символы базовой последовательности имеют в базовой последовательности. Кроме того, блоки символов непосредственно следуют друг за другом.
В одной конфигурации предусматривается, что пилот–последовательность имеет L символов пилот–последовательности, при этом L является натуральным числом. Если пилот–последовательность имеет длину в восемь символов и каждый символ базовой последовательность повторяется один раз, т.е., если R=2, то требуется четыре символа базовой последовательности.
В одной конфигурации каждый символ базовой последовательности повторяется один раз, так что R=2.
Одна конфигурация состоит в том, что базовая последовательность конфигурируется так, что корреляция пилот–последовательности с сигналом передачи, сформированным из пилот–последовательности, имеет основной максимум, который настолько узок, насколько это возможно, и/или вторичный максимум, который настолько мал, насколько это возможно. Это относится к выбору базовой последовательности. Точнее конфигурация описывает корреляцию фактической пилот–последовательности с модулированным (непрерывным во времени) сигналом, сформированным из нее, который передается передатчиком.
В одной конфигурации предусматривается, что в случае, когда пилот–последовательность имеет восемь символов пилот–последовательности, базовая последовательность имеет одну из следующих форм: 0010 или 1101 или 0100 или 1011. Таким образом нули и единицы являются соответствующими двоичными битами базовой последовательности. Последовательности, приведенные здесь и в нижеследующем в одной конфигурации, являются в частности связанными с Минимальной Манипуляцией (MSK), как типом отображения двоичных символов в участках сигнала, которые должны быть сформированы из них в действительности. В качестве альтернативы или в дополнение последовательности, приведенные здесь и в нижеследующем, применяются к другим способам линейной или квазилинейной модуляции, таким как MSK или GMSK.
Описанные биты преобразуются в фактические символы посредством соответствующей модуляции и/или посредством отображения.
Одна конфигурация состоит в том, что в случае, когда пилот–последовательность имеет двенадцать символов пилот–последовательности, базовая последовательность имеет одну из следующих форм или форм, полученных из них путем изменения очередности битов на обратную: 000101, 001011, 001101, 010001, 111010, 110100, 110010 или 101110. Таким образом каждые из нулей и единиц являются двоичными битами базовой последовательности. При выборе базовой последовательности обычно известно, что обращение битов или изменение на обратную последовательности битов не меняет свойств корреляции у последовательности.
В одной конфигурации предусматривается, что генератор сигнала в пилот–последовательности обеспечивает по меньшей мере один блок символов, содержащий символ базовой последовательности и его (R–1) повторения, при этом символы базовой последовательности обеспечиваются фазовыми множителями. Данная конфигурация относится как к случаю, когда базовая последовательность содержит только один символ базовой последовательности, так и к случаю, когда базовая последовательность содержит несколько символов базовой последовательности. В вышеупомянутой конфигурации, следовательно, символ базовой последовательности последовательно R–кратно встречается в пилот–последовательности, однако, обеспечен фазовыми множителями.
В одной конфигурации предусматривается, что генератор сигнала обеспечивает пилот–последовательность, которая начинается с базовой последовательности, содержащей несколько символов базовой последовательности. В пилот–последовательности генератор сигнала, таким образом, обеспечивает блоки символов так, что каждый содержит символ базовой последовательности и его (R–1) повторения, и каждый, вследствие этого, длиной в R символов. Генератор сигнала обеспечивает символы базовой последовательности фазовыми множителями так, что фазовые множители iого появления символа базовой последовательности в блоке символов являются одними и теми же для всех блоков символов. i является натуральным числом между 1 и R и указывает позицию символа базовой последовательности в соответствующем блоке символов. iое появление с i=1 является нулевым повторением. Дополнительные пояснения можно найти в нижеследующем описании. Одна конфигурация в частности обеспечивает то, что повторные символы обеспечиваются разными фазовыми множителями.
В одной конфигурации фазовые множители являются компонентами алфавита модуляции. Таким образом алфавит модуляции в целом используется, чтобы преобразовывать цифровые символы применительно к аналоговой обработке и/или в данный момент передаче сигнала.
Таким образом первый символ базовой последовательности имеет одинаковый фазовым множитель во всех блоках символов, и соответствующий второй – т.е. расположенный во второй позиции – символ базовой последовательности соответственно имеет одинаковый фазовый множитель во всех блоках символов, который отличается в одной конфигурации от фазового множителя соответствующего первого символа базовой последовательности. Таким образом, когда рассматриваются все символы базовой последовательности, ширина шага одних и тех же фазовых множителей задается повторением символов базовой последовательности.
Одна конфигурация состоит в том, что фазовые множители являются результатом произведения фазы, идентифицируемой с помощью цr, и мнимого числа j в качестве показателя натуральной экспоненциальной функции, причем фаза цr лежит между 0 и 2р или 0° и 360°.
Одна конфигурация состоит в том, что в случае, когда пилот–последовательность имеет восемь символов пилот–последовательности, то пилот–последовательность имеет одну из следующих форм или форм, полученных из них путем изменения очередности битов на обратную: 01011001, 10100110, 10011010, 01100101, 00001100, 11110011, 00110000, 11001111. Таким образом каждое из нулей и единиц является двоичными битами пилот–последовательности. В пилот–последовательностях символы передаются в указанной очередности.
В одной конфигурации предусматривается, что в случае, когда пилот–последовательность имеет двенадцать символов пилот–последовательности, то пилот–последовательность имеет одну из следующих форм или форм, полученных из них путем изменения очередности битов на обратную:
000000110011 или 111111001100 или 1100110000 или 001100111111 или 010101100110 или 101010011001 или 011001101010 или 100110010101 или 000011001111 или 111100110000 или 010110011010 или 101001100101 или 000011110011 или 111100001100 или 110011110000 или 001100001111 или 010110100110 или 101001011001 или 011001011010 или 100110100101 или 001100000011 или 110011111100 или 110000001100 или 001111110011 или 011001010110 или 100110101001 или 011010100110 или 100101011001.
Таким образом нули и единицы являются двоичными битами пилот–последовательности. В одной конфигурации вышеприведенные пилот–последовательности связаны с отображением MSK.
Генератор сигнала должен обеспечивать пилот–последовательность так, что пилот–последовательность имеет по меньшей мере один добавочный символ. Генератор сигнала обеспечивает по меньшей мере один блок символов в пилот–последовательности, который содержит символ базовой последовательности и его (R–1) повторения. Генератор сигнала обеспечивает пилот–последовательность так, что по меньшей мере один добавочный символ предшествует или следует за блоком символов.
В одной конфигурации предусматривается, что генератор сигнала обеспечивает пилот–последовательность так, что пилот–последовательность имеет по меньшей мере один добавочный символ. Таким образом генератор сигнала обеспечивает блоки символов в пилот–последовательности, причем каждый содержит символ базовой последовательности и его повторения. Кроме того, генератор сигнала обеспечивает пилот–последовательность так, что по меньшей мере один добавочный символ предшествует или следует за блоками символов. В одной конфигурации блоки символов непосредственно следуют друг за другом так, что отсутствуют добавочные символы между блоками символов и добавочные символы только следуют за ними или предшествуют им.
В одной конфигурации предусматривается, что генератор сигнала обеспечивает пилот–последовательность так, что пилот–последовательность имеет по меньшей мере два добавочных символа. Таким образом генератор сигнала обеспечивает пилот–последовательность так, что по меньшей мере один добавочный символ из по меньшей мере двух добавочных символов предшествует блокам символов и по меньшей мере один другой добавочный символ из по меньшей мере двух добавочных символов следует за блоками символов. Таким образом пилот–последовательности состоят из ядра, сформированного R–кратными символами базовой последовательности, и своего рода окружения посредством добавочных символов.
Одна конфигурация состоит в том, что по меньшей мере один добавочный символ или по меньшей мере два добавочных символа сконфигурированы так, что корреляция пилот–последовательности с сигналом передачи, сформированным из пилот–последовательности, имеет основной максимум, который настолько узок, насколько это возможно, и/или вторичный максимум, который настолько мал, насколько это возможно. Таким образом выбор добавочного символа или символов основан на том факте, что результирующая пилот–последовательность может быть идентифицирована и/или синхронизирована настолько хорошо, насколько это возможно.
В одной конфигурации предусматривается, что в случае, когда пилот–последовательность имеем восемь символов пилот–последовательности, то базовая последовательность имеет форму 001 и присутствует два добавочных бита, которые вместе имеют одну из следующих форм: 01 или 10 или 00 или 11. Таким образом нули и единицы являются соответствующими двоичными битами базовой последовательности и двоичными добавочными битами. Аналогично уже упомянутым другим битам добавочные биты преобразуются в добавочные символы путем соответствующего отображения. То же самое применяется к битам базовой последовательности.
Дополнительная или альтернативная компоновка к вышеупомянутой конфигурации состоит в том, что пилот–последовательность имеет одну из следующих форм или форм, полученных из них путем изменения очередности битов на обратную:
00001101 или 11110010 или 10110000 или 01001111 или 01011000 или 10100111 или 00011010 или 11100101 или 01000011 или 10111100 или 11000010 или 00111101 или 00010110 или 11101001 или 01101000 или 10010111 или 10000110 или 01111001 или 01100001 или 10011110 или 10011110 или 00101100 или 11010011 или 00110100 или 11001011.
Таким образом нули и единицы являются двоичными битами пилот–последовательности. В одной конфигурации вышеупомянутые пилот–последовательности связаны с отображением MSK.
В одной конфигурации предусматривается, что в случае, когда пилот–последовательность имеет двенадцать символов пилот–последовательности, то базовая последовательность имеет форму 00010, и присутствуют два добавочных бита, которые вместе имеют одну из следующих форм: 01 или 10 или 00 или 11. Таким образом каждое из нулей и единиц является двоичными битами базовой последовательности и двоичными добавочными битами.
Дополнительная или альтернативная компоновка к вышеупомянутой конфигурации состоит в том, что пилот–последовательность имеет одну из следующих форм или форм, полученных из них путем изменения очередности битов на обратную:
100000011001 или 011111100110 или 100110000001 или 011001111110 или 001010110011 или 110101001100 или 110011010100 или 001100101011 или 000000110010 или 111111001101 или 010011000000 или 1011001111 или 010101100111 или 101010011000 или 111001101010 или 000110010101 или 010000001100 или 101111110011 или 001100000010 или 1100111101 или 000101011001 или 111010100110 или 100110101000 или 011001010111.
Таким образом нули и единицы являются двоичными битами пилот–последовательности. В одной конфигурации вышеупомянутые пилот–последовательности связаны с отображением MSK.
Кроме того, изобретение добивается цели посредством способа для передачи сигналов.
Таким образом, способ включает в себя по меньшей мере следующие этапы, на которых:
– каждый из сигналов передается с пилот–последовательностью, которая содержит множество символов пилот–последовательности, и
– обеспечиваются пилот–последовательности, которые начинаются в базовой последовательности с по меньшей мере одним символом базовой последовательности так, что символ базовой последовательности многократно формирует символы пилот–последовательности по меньшей мере последовательно.
Вышеупомянутые конфигурации передатчика могут быть реализованы посредством этапов, соответствующих конфигурациям способа так, что здесь обходятся без повторения вариантов осуществления.
Изобретение также добивается цели посредством приемника.
Приемник выполнен с возможностью приема по меньшей мере одного сигнала и оценки его в отношении пилот–последовательности. В одной конфигурации приемник обращается к сохраненным или обычно известным опорным последовательностям для оценки.
В одной конфигурации известная – приемнику – опорная последовательность соответствует пилот–последовательности, которая используется передатчиком для передачи, и данная опорная последовательность используется приемником для оценки пилот–последовательности, которую включает в себя принятый сигнал.
Каждая из нижеследующих конфигураций относится к конкретным вариантам оценки или обработки сигнала для оценки. Таким образом в частности описываются вспомогательные средства и вспомогательные компоненты приемника, которые используются для оценки в отношении пилот–последовательности.
В одной конфигурации приемник включает в себя устройство оценки сигнала.
Устройство оценки сигнала сконфигурировано так, что принятый сигнал подвергается первоначальной оценке. Таким образом устройство оценки сигнала, по меньшей мере, частично осуществляет выборку принятого сигнала во время первой оценки с первой частотой выборки. В качестве альтернативы или в дополнение средство оценки сигнала использует только каждую iую выборку для обработки выборок принятого сигнала. Таким образом i является натуральным числом больше или равным двум. В дополнение устройство оценки сигнала формирует результат оценки в отношении пилот–последовательности в течение первой оценки.
В зависимости от результата оценки устройство оценки сигнала подвергает принятый сигнал второй оценке. Для этого устройство оценки сигнала, по меньшей мере, частично осуществляет выборку принятого сигнала во время второй оценки со второй частотой выборки. В качестве альтернативы или в дополнение устройство оценки сигнала использует только каждую kую выборку при второй оценке для дополнительной обработки выборок принятого сигнала. Таким образом вторая частота выборки больше первой частоты выборки и/или k является натуральным числом меньше i.
Устройство оценки сигнала таким образом выполняет подвыборку при первой оценке либо путем установки частоты выборки во время выборки соответствующим образом, либо путем обработки меньшего числа выборок. Если в частности сигналы от передатчика, описанного выше, используются с пилот–последовательностями, основанными на базовых последовательностях, то подвыборки достаточно благодаря повторению символов.
Вследствие этого уже во время первой оценки может быть сформирован результат оценки, который предоставляет информацию о том, была ли обнаружена пилот–последовательность. Если это так, то в одной конфигурации имеет место вторая оценка, при которой используется более высокая частота выборки. В одной конфигурации это позволяет верифицировать положительный результат оценки для первой оценки. Например, при второй оценке может быть определено, является ли каждый символ базовой последовательности в действительности R–кратным.
В одной конфигурации предусматривается, что устройство оценки сигнала при первой оценке идентифицирует из принятого сигнала сокращенную пилот–последовательность, состоящую из числа символов, при этом число символов сокращенной пилот–последовательности равно числу символов базовой последовательности. Таким образом для формирования результата оценки устройство оценки сигнала сравнивает идентифицированную сокращенную пилот–последовательность с сохраненными базовыми последовательностями (альтернативным обозначением является опорные базовые последовательности). Если первая частота выборки соответствует частоте повторения символов базовой последовательности, то результатом является сокращенная пилот–последовательность, которая является в идеале точно такой же, как базовая последовательность, используемая для обеспечения пилот–последовательности. Для этого возможные базовые последовательности доступны устройству оценки сигнала, будучи сохраненными в конфигурации в соответствующей памяти данных.
Одна конфигурация состоит в том, что устройство оценки сигнала определяет корреляции во время обработки выборок или аппроксимацию корреляций с сохраненными базовыми последовательностями. Вследствие этого сохраненные базовые последовательности являются также теми, которые обычно используются для формирования пилот–последовательностей и также могут упоминаться, как опорные базовые последовательности, например.
В дополнительной конфигурации приемника, приемник включает в себя устройство обработки. Данное устройство обработки может присутствовать как альтернатива или как дополнение для устройства оценки сигнала.
Устройство обработки выполнено с возможностью деления пилот–последовательности принятого сигнала на по меньшей мере две подзоны, которые частично перекрываются. Устройство обработки соотносит по меньшей мере две подзоны пилот–последовательности с подзонами опорных последовательностей и формирует частичный результат в каждом случае. В заключение устройство обработки формирует из частичных результатов общий результат в отношении пилот–последовательности принятого сигнала.
В одной конфигурации опорные последовательности хранятся в памяти данных.
В одной конфигурации предусматривается, что устройство обработки складывает частичные результаты некогерентным образом, чтобы получить общий результат.
В соответствии с одной конфигурацией устройство обработки подвергает символы по меньшей мере двух подзон взвешиванию перед корреляцией, в зависимости от того, к какому числу подзон принадлежат символы. Если символы таким образом принадлежат перекрывающейся зоне, то они взвешиваются иначе, чем если бы они принадлежали неперекрывающейся зоне.
В дополнительной конфигурации приемника приемник включает в себя устройство преобразования. Данное устройство преобразования может присутствовать как альтернатива или как дополнение для устройства оценки сигнала и/или устройства обработки.
Устройство преобразования выполнено с возможностью определения преобразования Фурье отдельно для по меньшей мере двух подпакетов пилот–последовательности или для по меньшей мере двух пилот–подпоследовательностей. Устройство преобразования складывает определенное преобразование Фурье некогерентным образом и формирует результат сложения. Более того устройство преобразования формирует результат оценки на основании результата сложения. В одной конфигурации результат оценки основан на применении опорных последовательностей. В одной конфигурации результат оценки применяется в отношении пилот–последовательности и в качестве альтернативы в отношении по меньшей мере двух пилот–подпоследовательностей, которые принадлежат общей пилот–последовательности.
В зависимости от конфигурации пилот–последовательность таким образом делится на подпакеты или принимается в форме пилот–подпоследовательностей. Например, полная и когерентная пилот–последовательность принимается и делится на подпоследовательности во время оценки приемника.
В одной конфигурации два подпакета принадлежат двум принятым сигналам. Таким образом приемник принимает по меньшей мере два сигнала, каждому из которых принадлежит по меньшей мере один подпакет.
В альтернативной конфигурации два подпакета принадлежат одному принятому сигналу.
В соответствии с одной конфигурацией перед определением преобразования Фурье устройство преобразования заполняет подпакет или подпоследовательность, которые должны быть преобразованы, нулями в начале или конце подпакета или подпоследовательности.
Одна конфигурация предусматривает то, что устройство преобразования после определения преобразования Фурье выполняет интерполяцию между максимумом и соседними позициями максимума у подпакета или подпоследовательности, которые должны быть преобразованы.
В альтернативной конфигурации предусматривается, что устройство преобразования, после формирования результата сложения, выполняет интерполяцию между максимумом и соседними местоположениями максимума у подпакета, который должен быть преобразован, или у подпоследовательности, которая должна быть преобразована.
В соответствии с одной конфигурацией устройство преобразования выполняет интерполяцию с помощью полинома второй степени.
Одна конфигурация предусматривает, что устройство преобразования выполняет интерполяцию с помощью полинома следующей формы: y(x)=y0 – c(x–x0)2,
при этом три параметра y0, c и x0 определяются на основе максимума у соседних позиций. Параметры выбираются так, чтобы каждый из них проходил через максимальную и соседние позиции.
Устройство преобразования определяет максимальное значение интерполяционной кривой с помощью следующей функции: 
при этом x0 является значением абсциссы максимума полинома, y(0) является максимумом, и y(–1) и y(1) являются соседними позициями.
Полином второй степени формы y(x) = y0 – c(x–x0)2 используется в качестве интерполяционной функции в одной конфигурации.
Значение x0 абсциссы максимума полинома, например, представляет собой улучшенную оценку времени (нормализованную к интервалу выборки T/N).
Из значения x0 абсциссы максимума полинома улучшенное значение оценки частоты может быть определено через

В соответствии с одной конфигурацией некогерентное сложение состоит в сложении величин или квадратов величин или аппроксимации величин у определенных преобразований Фурье. Аппроксимация величины является, например, суммой величины действительной части и величины мнимой части.
Одна конфигурация предусматривает то, что устройство преобразования сконфигурировано так, чтобы выполнять быстрое преобразование Фурье или дискретное преобразование Фурье для оценки пилот–последовательности в отношении частоты и/или фазы.
Кроме того, изобретение достигает цели посредством способа для приема по меньшей мере одного сигнала, при этом принятый сигнал оценивается в отношении пилот последовательности.
Вышеупомянутые конфигурации приемника могут быть реализованы посредством этапов соответствующих конфигураций способа так, что здесь обходятся без повторения вариантов осуществления.
В одной конфигурации способ содержит следующие этапы:
– Принятый сигнал подвергается первоначальной оценке,
–– при которой осуществляется, по меньшей мере, частичная выборка принятого сигнала с первой частотой выборки, и/или
при которой только каждое iое значение выборки используется для дополнительной обработки выборок принятого сигнала, и
–– при которой формируется результат оценки, относящийся к пилот–последовательности,
–– при этом i является натуральным числом, больше или равным двум.
– В зависимости от результата оценки принятый сигнал подвергается второй оценке,
–– при которой осуществляется, по меньшей мере, частичная выборка принятого сигнала со второй частотой выборки,
и/или
при которой только каждая kая выборка используется для дополнительной обработки выборок принятого сигнала, и
–– при этом вторая частота выборки больше первой частоты выборки, и/или k является натуральным числом меньше i.
Нижеследующие этапы предусмотрены в альтернативной или дополнительной конфигурации:
– Пилот–последовательность сигнала делится по меньшей мере на две части, которые частично перекрываются.
– По меньшей мере две подзоны соотносят с подзонами опорных последовательностей, и частичный результат формируется в каждом случае.
– Общий результат формируется из частичных результатов в отношении пилот–последовательности.
В равной степени альтернативной или дополнительной конфигурации способ, по меньшей мере, содержит следующие этапы:
– Для по меньшей мере двух подпакетов пилот–последовательности или для по меньшей мере двух пилот–подпоследовательностей преобразование Фурье определяется отдельно в каждом случае.
– Определенные преобразования Фурье складываются некогерентным образом, и формируется результат сложения.
– Результат оценки для пилот–последовательности формируется на основе результата сложения и на основе опорных последовательностей.
Кроме того, изобретение относится к системе передачи сигнала, которая имеет по меньшей мере один передатчик в одной из конфигураций, которые обсуждались выше, и по меньшей мере один приемник в одной из конфигураций, которые обсуждались выше.
В заключение изобретение относится к компьютерной программе с программным кодом для осуществления вышеупомянутого способа в соответствии с одной из конфигураций.
Более подробно, существует множество возможностей для выполнения и разработки передатчика, приемника, системы и соответствующих способов. С этой целью можно с одной стороны обратиться к формуле изобретения, а с другой стороны к нижеследующему описанию вариантов осуществления вместе с чертежами, при этом:
Фиг. 1 показывает схематическое представление обработки сигнала в соответствии со способом корреляции для обнаружения пилот–последовательности,
Фиг. 2 показывает апериодическую функцию автокорреляции двоичной последовательности 10010111,
Фиг. 3 показывает непрерывную по времени функцию взаимной корреляции последовательности 10010111 с модуляцией MSK и согласованный фильтр модуляции MSK,
Фиг. 4 показывает представление обработки сигнала с неизвестным уходом частоты,
Фиг. 5 показывает схематическое представление системы с несколькими передатчиками и приемниками,
Фиг. 6 показывает визуальное представления формирования пилот–последовательности из базовой последовательности,
Фиг. 7 показывает график значений функций корреляции для модуляции MSK с приемником согласованного фильтра для длины пилот–последовательности в восемь символов,
Фиг. 8 показывает график значений функций корреляции для модуляции MSK с приемником согласованного фильтра для длины пилот–последовательности в 12 символов,
Фиг. 9 показывает график значений функций корреляции для модуляции MSK с приемником согласованного фильтра для длины пилот–последовательности в восемь символов с добавочными символами,
Фиг. 10 показывает график значений функций корреляции для модуляции MSK с приемником согласованного фильтра для длины пилот–последовательности в 12 символов с добавочными символами,
Фиг. 11 показывает схематическое представление деления пилот–последовательности на две подзоны без перекрытия,
Фиг. 12 показывает схематическое представление деления пилот–последовательности на две подзоны с перекрытием,
Фиг. 13 показывает схематическое представление деления пилот–последовательности на три подзоны с перекрытием, и
Фиг. 14 показывает схематическое представление примера используемой модуляции.
В нижеследующем еще раз будут обсуждаться проблемы асинхронной системы для передачи данных. Таким образом передатчик передает сигналы, которые обеспечены пилот–последовательностями. Приемник принимает сигналы и оценивает их в отношении пилот–последовательности, т.е. приемник исследует принятые сигналы в отношении того, имеют ли они пилот–последовательности. С этой целью приемник частично обращается к известным опорным последовательностям.
Принятый сигнал после выборки обычно присутствует в приемнике с некоторой избыточной выборкой. В приемнике для каждого временного шага k сигнала с избыточной выборкой оценивается вероятность того, что последовательность синхронизации присутствовала в непосредственно предшествующем временном окне принятого сигнала. С этой целью функция fNP(k) применяется к выборкам принятого сигнала для каждого временного шага, причем выходное значение которой сравнивается с пороговой величиной. Если значение функции превышает пороговую величину, то предполагается, что пилот–последовательность была передана в данный момент. Теоретические основы данного способа рассматриваются в так называемой «теории обнаружения» (детектор Неймана–Пирсона, [8]).
До настоящего времени для практической реализации обнаружения использовались способы корреляции, в которых принятый сигнал постоянно соотносят с пилот–последовательностью. Для обнаружения оценивается величина результата корреляции. Впоследствии имеет место только что описанное обнаружение пороговой величины или обнаружение максимального правдоподобия (ML) или их сочетание.
При выборе пилот–последовательности, которая будет использоваться, обычно обращались к функции автокорреляции (ACF). Выбирались последовательности, в которых минимальны пики вторичной корреляции у ACF и ACF падает настолько круто по обе стороны от основного пика, насколько это возможно. Это позволяет очень точно определять правильное время синхронизации. Кроме того, из–за низких пиков вторичной корреляции число ложных обнаружений в позициях этих вторичных пиков сокращается.
В документе DE 10 2011 082 098 A1 описывается способ для передатчиков с питанием от батареи, в котором пакет данных делится на несколько подпакетов, причем каждый из которых передает только фрагмент общей информации (так называемое «разбиение телеграммы»). Такой подпакет упоминается как «скачок». Несколько символов информации передается в скачке. Скачки передаются по одной частоте или распределенными по нескольким частотам (так называемое «скачкообразное изменение частоты»). Между скачками присутствую паузы, в которых передача не происходит.
В одной конфигурации такие скачки возможно используются передатчиками или приемниками, описанными в нижеследующем.
Приемник использует пилот–последовательность, присутствующую в каждой телеграмме, для выполнения тем, упомянутых в общем введении: Обнаружение и синхронизация.
Пилот–последовательность состоит из числа L символов модуляции (также упоминаемых как пилот–символы или здесь по тексту символы пилот–последовательности) и обычно передается компактно либо в начале (преамбула), либо в середине (мидамбула) телеграммы. В качестве альтернативы пилот–последовательность также может быть произвольно распределена по символам данных. Обычной практикой является использование пилот–символов из того же самого алфавита модуляции, что и символы данных (например, многоуровневая фазовая манипуляция, M–PSK, или Квадратурная Амплитудная Модуляция с Числом Значащих Позиций, Равным M, M–QAM). Пилот–символы известны получателю заранее или сохранены соответствующим образом.
Когда используется разбиение телеграммы, т.е. во время разбиения телеграммы на несколько подпакетов (также именуемых фрагментами), каждый фрагмент содержит свою собственную пилот–последовательность. Таким образом, отдельные фрагменты обычно содержат одну и ту же пилот–последовательность.
В современных приемниках систем основанных на радиосвязи обычной практикой является понижение частоты принятого сигнала до основной полосы частот после полосовой фильтрации и осуществление его выборки и квантования равноудалено по времени с использованием аналого–цифрового преобразователя (ADC). Каждое значение после выборки является комплексным и состоит из действительной и мнимой части. Таким образом выборка осуществляется, по меньшей мере, в такте символа или, как правило, в целых кратных (избыточная выборка). Вследствие этого одной задачей обнаружения является поиск участка сигнала с пилот–последовательностью в данной последовательности выборок. Для этого известны различные способы, которые кратко описаны в нижеследующем.
Способ корреляции с низким уходом частоты
Последовательность выборок принятого сигнала соотносится с последовательностью символов известных опорных частот.
Для определения значения корреляции в момент времени k значение выборки в момент времени k и предшествующие L–1 выборки берутся из принятого сигнала с расстоянием между символами. При N–кратной избыточной выборке берется только каждая Nая выборка.
Эти L значения умножаются на сопряженные комплексные символы пилот–последовательности. Затем произведения складываются вместе. На основании таким образом полученной величины значения корреляции принимается решение о том, содержат или нет L выборки полную пилот–последовательность. Величина значения корреляции вследствие этого также именуется переменной решения.
Пример полной обработки сигнала с временем k выборки показан на Фиг. 1.
Таким образом принятые сигналы r(t) сначала проходят через фильтр приема (например, оптимальный фильтр, также известный как согласованный фильтр) для того, чтобы получить зависимую от времени функцию x(t). Помеченный оцениваемый конец пилот–последовательности идентифицируется посредством k0. Кроме того, T является расстоянием между символами или 1/T является частотой символов. N является коэффициентом избыточной выборки.  является отклонением от оптимального времени выборки (т.е., временная ошибка), а
является отклонением от оптимального времени выборки (т.е., временная ошибка), а  является временем kого значения после выборки. В дополнение a[0], a[0], …, a[L–1] являются пилот–символами (или символами пилот–последовательности), при этом символы a[0] передаются первыми, в a[L–1] последними. Символ * верхнего индекса указывает на то, что должно быть взято сопряженное комплексное значение. В заключение, z–N обозначает элемент задержки, который задерживается на N выборок.
является временем kого значения после выборки. В дополнение a[0], a[0], …, a[L–1] являются пилот–символами (или символами пилот–последовательности), при этом символы a[0] передаются первыми, в a[L–1] последними. Символ * верхнего индекса указывает на то, что должно быть взято сопряженное комплексное значение. В заключение, z–N обозначает элемент задержки, который задерживается на N выборок.
Обычно используются следующие обозначения:
– Переменные времени в круглых скобках всегда являются непрерывными во времени. Например, r(t) обозначает непрерывный по времени сигнал приема.
– Переменная времени в квадратных скобках всегда является дискретной по времени и обычно представляет собой последовательную нумерацию выборок. Например, x[k] обозначает kое значение (непрерывного по времени) сигнала x(t) после фильтра приема.
Для принятия решения в отношении того, присутствует ли пилот–последовательность, по сути известны два способа, которые часто используются один за другим:
1. Сначала обычно выполняется обнаружение пороговой величины. Переменная |d[k]| решения сравнивается с пороговой величиной dthr. Если переменная решения находится выше пороговой величины, то считается, что пилот–последовательность обнаружена, и временной индекс k отмечает последнюю выборку последовательности. Таким образом уже доступна грубая оценка временной позиции пилот–последовательности. Это тот случай на Фиг. 1, когда установлено k0=k. В отрицательном случае счетчик k увеличивается: k становится k+1.
2. Из обнаруженной пилот–последовательности необязательно может быть выполнено обнаружение максимального значения в рамках указанного временного окна со времени первого обнаружения. С этой целью значение выборки с максимальной величиной переменной решения используется в качестве времени обнаружения. Временное окно обычно меньше продолжительности телеграммы. Данный этап увеличивает точность оценки времени, что в частности выгодно для пилот–последовательностей с неблагоприятными свойствами корреляции.
Выбор пилот последовательности:
Для алфавита символов из M символов существует ML возможных пилот–последовательностей. При двоичном алфавите символов (M=2) и длине пилот–последовательности L=8, существует суммарно 28=256 возможных последовательностей.
Для обнаружения с помощью способа корреляции центральное значение имеют свойства апериодической функции корреляции (ACF) пилот–последовательности. Математически это определяется посредством:

при a[l]=0 для l<1 или l≥L.
Максимальным значением является i=0 и является L для всех последовательностей. Если рассматривается только обнаружение пилот–последовательности, тогда в равной степени подходят все последовательности.
Однако, для того чтобы оценить время настолько точно, насколько это возможно, желательно, чтобы размеры всех значений ACF для i≠0 были настолько небольшими, насколько это возможно по отношению к максимальному значению. Эти значения также именуются вторичными пиками корреляции.
ACF описывается как идеальная, если ее вторичные пики корреляции равны нулю. К сожалению, отсутствуют последовательности с идеальной ACF.
В настоящее время обычной практикой является использование таких пилот–последовательностей, содержащих наименьшие возможные вторичные пики. Примером двоичной последовательности длиной в восемь является 10010111. Если биты 0 и 1 отображаются в символах +1 и –1, то это приводит к ACF на Фиг. 2. Таким образом, ACF[i] наносится по оси y через i по оси x. Максимальное значение вторичных пиков составляет 2.
Кроме того, обычным является использование непрерывной по времени функции взаимной корреляции (CCF) между модулированным и фильтрованным сигналом и ACF у пилот–последовательности, чтобы выбирать пилот–последовательности вместо дискретной по времени ACF. Однако их форма по существу определяется ACF у пилот–последовательности, но также зависит от импульса модуляции и импульсной характеристики фильтра приема.
Для линейно модулированных сигналов и тех, которые могут быть представлены линейно модулированными сигналами (например, Минимальная Манипуляция, MSK, или Минимальная Манипуляция с Гауссовой Фильтрацией, GMSK), может быть показано, что данная функция взаимной корреляции задается в нормализованном представлении посредством:
Здесь h(t) является результатом свертки импульса g(t) модуляции с импульсной характеристикой gr(t) фильтра приема.
Для правильной оценки времени предпочтительными являются последовательности с CCF, которые настолько близки, насколько это возможно к идеальной CCF до и после основного максимума. Идеальная CCF получается из вышеупомянутой формулы с теоретической идеальной ACF у пилот–последовательности. Таким образом она имеет форму импульса h(t). Вышеупомянутая последовательность 10010111 удовлетворяет данному свойству (см. Фиг. 3).
На Фиг. 3 также идеальная CCF для MSK в сочетании с согласованным фильтром нанесена пунктирной линией. Нормализованная CCF нанесена на оси y. Временное смещение k нанесено на оси x. Таким образом показана непрерывная CCF у последовательности 10010111 с модуляцией MSK и согласованным фильтром. Штриховая кривая является функцией h(t).
Способ обнаружения неизвестного ухода частоты:
Недостаток способа корреляции, описанного выше, состоит в том, что обнаружение является надежным только для очень небольших различий по частоте (таким образом небольшие различия по частоте между частотой несущей сигнала передачи и центральной частотой фильтра приема). Дополнительные способы вследствие этого описаны ниже.
Способ FFT:
В [9] описывается способ, который также пригоден для больших уходов частоты. Его можно рассматривать как обобщение способа, описанного выше. Существенные признаки кратко изложены ниже.
Значения x[k–l]a*[L–l+1] на Фиг. 1 умножаются на выборки комплексного экспоненциального колебания перед суммированием. Это выполняется несколько раз для разных частот вибрации, которые упоминаются как частотные гипотезы.
Для каждой частотной гипотезы получается отдельная переменна |d[k, i]| решения, которая зависит не только от k, но также от индекса i, при этом i относится к iой частоте. Выбирается максимум всех переменных |d[k, i]| решения, определенных для временного шага k. Ассоциированный индекс частоты упоминается как i0[k].
Затем максимум сравнивается с пороговой величиной. Если максимум выше пороговой величины, то пилот–последовательность обнаружена и частота, ассоциированная с индексом i0[k], может быть использована в качестве грубой оценки ухода частоты.
Для равноудаленных частотных гипотез это соответствует дискретному преобразованию Фурье (DFT) у L значений x[k]a*[L–1], x[k–N]a*[L–2] до x[k–(L–1)N]a*[0].
DFT может быть в частности эффективным в форме хорошо известного быстрого преобразования Фурье (FFT), при условии, что L является степенью двух. Если L не является степенью двух, то длина DFT округляется до следующей более высокой степени двух и соответствующее число нулей добавляется к L значениям так, что может быть применено FFT.
Для увеличения надежности обнаружения L входных значений FFT по–прежнему могут быть дополнены любым числом дополнительных нулей.
Способ показан на Фиг. 4.
Способ пригоден для ухода частоты почти до половины скорости передачи символов.
Однако, если используется согласованный фильтр (так называемый оптимальный фильтр), то потеря энергии около 3дБ должна быть принята при уходе частоты 0.5. Данная потеря может быть значительно уменьшена посредством расширения полосы пропускания фильтра приема (например, на коэффициент 1.2). Тем не менее это приводит к некоторой потери на низком уходе частоты (при расширении полосы пропускания в 1.2, потеря составляет приблизительно 0.8дБ).
Недостаток способа FFT состоит в относительно высоких вычислительных затратах. Для одного FFT в лучшем случае (если L является степенью двух и не вставляются нули) около 5L(1+ldL) операций с плавающей точкой (FLOP) должно быть выполнено из расчета на временной шаг k [10]. Это значительно больше чем 2L FLOP, которые требуются для суммирования в способе корреляции при низком уходе частоты.
Способ FFT считается теоретически оптимальным исходя из критерия Неймана–Пирсона [11].
Корреляция разности фаз:
Предшествующий уровень техники также описывает способ обнаружения при неизвестном уходе частоты, который содержит значительное меньшие затрат на обработку сигнала.
Вместо выборок x[k] в каждом случае используются произведения x*[k]x[k–N] двух выборок при расстояниях между символами, при этом сопряженное комплексное значение соответственно должно быть взято из самого последнего значения.
Соответственно в последовательности, показанной на Фиг. 1 символы a[l] замещаются произведениями a*[l]a[l–1]. Затем суммирование распространяется только на L–1 значения. Если пилот–последовательность обнаружена, значение фазы у переменной d[k] решения является мерой оцененного ухода частоты.
Недостаток состоит в том, что отношение мощности сигнала–к–шуму в переменной решения меньше, чем в способе FFT. Вследствие этого более высока вероятность того, что пилот–последовательность не будет обнаружена.
Фиг. 5 показывает систему 50, в которой теперь от двух передатчиков 1, 100 сигналы передаются и принимаются тремя приемниками 10, 20, 30. Сигналы испускаются с пилот–последовательностями так, что приемники 10, 20, 30 соответственно выполнены с возможностью обнаружения пилот–последовательностей в сигналах, которые они принимают. С этой целью каждый из приемников 10, 20, 30 обращается к опорным последовательностям.
Передатчик 100 является передатчиком в соответствии с предшествующим уровнем техники, который передает сигналы с пилот–последовательностями. Такие сигналы в соответствии с предшествующим уровнем техники могут быть в частности приняты и оптимально обработаны двумя из трех показанных приемников 20, 30.
Другой передатчик 1 передает сигналы, пилот–последовательности которых основаны на базовых последовательностях. Для того, чтобы воспользоваться преимуществом данного типа пилот–последовательности в частности сконфигурирован приемник, идентифицированный с помощью цифрового обозначения 10.
Передатчик 1 имеет генератор 2 сигнала, который формирует сигналы, которые должны быть переданы, и свойства которых описаны в нижеследующем в связи с Фиг. 6, в частности в отношении предоставления соответствующей пилот–последовательности. В частности, присутствуют пилот–последовательности с повторением символов. Сигналы, которые должны быть переданы, включают в себя, например, не только соответствующую пилот–последовательность, но также данные, например, происходящие от датчиков или относящиеся к свойствам передатчика и т.д.
Фиг. 6 схематически показывает пилот–последовательность с восемью символами в верхней строке, т.е. L=8 для длины L. Данная пилот–последовательность должна быть сформирована из базовой последовательности, содержащей несколько символов базовой последовательности.
Формирование пилот–последовательности осуществляется так, что символы базовой последовательности последовательно повторяются несколько раз. В показанном примере каждый символ базовой последовательности должен быть повторен один раз. В качестве альтернативы может быть сформулировано, что каждый символ базовой последовательности встречается дважды подряд в качестве символа пилот–последовательности. Применительно к (R–1) повторениям каждый символ базовой последовательности представлен R раз. Здесь применяется: R=2.
Вследствие этого, чтобы получить восемь символов пилот–последовательности, требуется повторение четырех символов базовой последовательности (L/R=8/2=4). Таким образом базовая последовательность составляет в длину четыре. Двоичные символы базовой последовательности приведены в примере в следующей очередности: 0110. Эти символы базовой последовательности введены в третьей строке Фиг. 6. В соответствии с вышеупомянутым обозначением символы являются: a[0] = 0; a[1] = 1; a[2] = 1 и a[3] = 0.
Посредством удвоения символов базовой последовательности пилот–последовательность, как показано в нижней строке, приводит к: 00111100.
В одной конфигурации отдельные символы базовой последовательности, которые повторяются настолько часто, насколько это необходимо – в особенности в соответствии с отображением, например, BPSK – обеспечены фазовым множителем.
При длине пилот–последовательности в восемь символов нижеследующие базовые последовательности отличаются преимущественной автокорреляцией, которая значительно упрощает оценку. Это базовые последовательности:
0010,
1101,
0100,
1011.
Это приводит к следующим четырем последовательностям:
00001100,
11110011,
00110000,
11001111
Если добавить фазовый множитель (в примере 180° в каждом случае), при этом очередность фазовых множителей в рамках блоков символов, которые являются результатом повторений символов базовой последовательности, является одной и той же, то в одной компоновке после последующего обратного отображения получаются следующие пилот–последовательности:
01011001,
10100110,
10011010,
01100101.
Промежуточный этап описан в нижеследующем с использованием комплексных символов.
Фиг. 7 показывает величину функций корреляции во время модуляции MSK с приемником согласованного фильтра. Линия a является полной корреляцией. Линия b является частичной корреляцией с R=2. Пунктирная линия c является ACF базового импульса MSK. Значение  является максимальной ошибкой от –0.5T до +0.5T, и был учтен уход частоты vT принятого сигнала между –0.4 и +0.4. В примере на Фиг. 7 значение в каждом случае составляет 0.027.
является максимальной ошибкой от –0.5T до +0.5T, и был учтен уход частоты vT принятого сигнала между –0.4 и +0.4. В примере на Фиг. 7 значение в каждом случае составляет 0.027.
Следующие базовые последовательности являются предпочтительными для длины пилот–последовательности L=12 с повторением символов базовой последовательности:
000101,
001011,
001101,
010001.
Следующие преимущественные пилот–последовательности в частности получаются из фазовых множителей:
a[0…5]
a[0…11]
111111001100
110011000000
001100111111
101010011001
011001101010
100110010101
111100110000
101001100101
111100001100
110011110000
001100001111
101001011001
011001011010
100110100101
110011111100
110000001100
001111110011
100110101001
011010100110
100101011001
Аналогично Фиг. 7, Фиг. 8 показывает значения функций корреляции четырех базовых последовательностей, при этом соответствующая базовая последовательность в каждом случае находится рядом с графиком. Линия a полной корреляции помечена в каждом случае, а линия b частичной корреляции помечена с помощью R=2. Пунктирная линия является ACF у базового импульса MSK.
Таким образом в одной конфигурации используются пилот–последовательности со следующими свойствами:
В рамках подпоследовательностей пилот–последовательности с каждым R пилот–символом, присутствуют символы, которые являются идентичными за исключением одного фазового множителя ejц. Фазовый множитель для первого повторного символа является одним и тем же во всех подпоследовательностях. Он также является одним и тем же для второго повторения во всех подпоследовательностях, и т.д. В одной конфигурации фазовый множитель является разным для разных повторений и идентичным в другой конфигурации. Таким образом R является делителем L. Предпочтительными являются фазовые множители, которые являются частью алфавита модуляции (при Квадратурно–Фазовой Манипуляции, QPSK, например, «1, j, –1, –j», которые соответствуют фазовым множителям 0°, 90°, 180° и 270°).
В одной конфигурации данные тогда отображаются с помощью алфавита модуляции до введения фазового множителя. Это, например, BPSK (двоичная PSK).
В примере Фиг. 6 базовые символы определены как [0, 1, 1 0] так, что после BPSK (т.е. при отображении так, что 0 становится –1, а 1 становится +1) символы читаются как: [–1, –1, +1, +1, +1, +1, –1, –1].
Если будет вставлен упомянутый фазовый множитель для повторения символа, который составляет 90° здесь, то пилот–последовательность соответствует: [–1, –j, +1, +j, +1, +j, –1, –j].
Данный тип пилот–последовательности предлагает большое преимущество в том, что при обнаружении с помощью подвыборки (см. на Фигурах с 7 по 10 линию b соответственно) достигается стационарность по длине повторения R. Таким образом вычислительные затраты на обнаружение в приемнике могут быть уменьшены.
Пилот–последовательность может быть составлена, например, посредством выбора базовой последовательности длиной L/R и повторения каждого символа (R–1) раз. rое повторение (r=1, 2, …, R–1) в каждой подпоследовательности умножается на фазовый множитель в конфигурации, при этом цr является свободно выбираемым между 0 и 2р.
Преимущество над пилот–последовательностями, ранее используемыми в предшествующем уровне техники, состоит в том, что для обнаружения могут быть использованы способы со значительно сокращенными затратами на обработку сигнала.
Недостатком является ограниченный выбор последовательности. Таким образом свойства ACF всей пилот–последовательности также могут быть установлены менее оптимальными, чем при свободном выборе всех символов. Однако. опыт показал, что последствия для оценки частоты, времени и фазы являются незначительными.
Для того чтобы дополнительно улучшить обнаружение пилот–последовательностей на стороне приемника в дополнительной конфигурации генератора 2 сигнала (см. Фиг. 5) пилот–последовательности обеспечиваются добавочными символами, которые предшествуют и/или следуют за блоками символов у повторений символов базовой последовательности. Это приводит к пилот–последовательностям с повторениями символа, которым предшествует и/или у которым прикрепляется символ(ы).
В одной конфигурации предусматривается, что подпоследовательность длиной L–1 или L–2 из полной пилот–последовательности длиной L, которая должна быть сформирована, обладает свойствами, описанными выше. Предварительным условием является то, что R является делителем L–1 или L–2 в качестве числа символов базовой последовательности из расчета на блок символов.
Для того, чтобы составить пилот–последовательности с добавочными символами, символы базовой последовательности длиной (L–1)/R или (L–2)/R повторяются (R–1) раз так, что символы являются доступными R раз. Затем предшествует или следует добавочный символ или несколько (по меньшей мере два) добавочных символов.
Одно преимущество состоит в том, что свойства ACF у всей пилот–последовательности могут быть лучше адаптированы к идеальным свойствам посредством свободного выбора символа границы или двух символов границы (в качестве альтернативного обозначения добавочных символов).
Недостаток состоит в том, что уменьшается доля базовой последовательности во всей пилот–последовательности. Это приводит к потере отношения сигнала–к–шуму, когда в приемнике осуществляется подвыборка (см. ниже).
Если x добавочных символов в целом используется для суммарной длины из L символов пилот–последовательности, тогда подпоследовательность длиной (L–x) обладает свойством того, что она является результатом повторных символов базовой последовательности.
В нижеследующих вариантах осуществления присутствует два добавочных символа, которые имеют форму 11, 00, 01 или 10. Таким образом либо оба добавочных символов предшествуют блокам символов, либо оба следуют за блоками символов или один добавочный символ предшествует, а другой добавочный символ следует.
Из–за добавочных символов число символов базовых последовательностей для указанной длины пилот–последовательностей одновременно уменьшается.
Для длины пилот–последовательности с L=8 с одним повторением каждого символа базовой последовательности (таким образом R=2) и двумя добавочными символами, требуется три символа базовой последовательности, которые имеют следующую форму: 001. При добавочных символах 01, 10, 00 и 11 и фазовых множителях, получаются следующие преимущественные пилот–последовательности, при этом каждый из добавочных символов отделен от фактического ядра пилот–последовательности, которая формируется блоками символов, вертикальной линией:
a[0…2]
a[0…7]
111100|10
10|110000
01|001111
101001|11
00|011010
11|100101
10|111100
110000|10
001111|01
11|101001
011010|00
100101|11
0|111100|1
0|110000|1
1|001111|0
1|101001|1
0|011010|0
1|100101|1
Фиг. 9 показывает соответствующие значения функций корреляции, при этом соответствующие пилот–последовательности находятся рядом с графиком. Помечена линия a полной корреляции, и линия b частичной корреляции помечена с помощью R=2. Пунктирная линия является ACF у базового импульса MSK, соответственно.
Для длины пилот–последовательности с L=12 для одного повторения каждого символа базовой последовательности (следовательно, R=2) и двух добавочных символов, требуется пять символов базовой последовательности, которые имеют следующую форму: 00010 (т.е. для символов базовой последовательности: a[0] = a[1] = a[2] = 0; a[3] = 1; a[4] = 0). При добавочных символах 01, 10, 00 и 11 и фазовых множителях получаются следующие пилот–последовательности, при этом добавочные символы отделены от блоков символов вертикальной линии как до этого.
a[0…4]
a[0…11]
0|1111110011|0
1|0011000000|1
0|1100111111|0
1|1010100110|0
1|1001101010|0
0|0110010101|1
1111110011|01
01|0011000000
10|1100111111
1010100110|00
11|1001101010
00|0110010101
10|1111110011
0011000000|10
1100111111|01
11|1010100110
1001101010|00
0110010101|11
Фиг. 10 показывает значения функций корреляции с соответствующими пилот–последовательностями рядом с графиком. Линия a полной корреляции и линия b частичной корреляции помечены с помощью R=2. Пунктирная линия является ACF у базового импульса MSK.
В нижеследующем описывается система Фиг. 5 и, в частности, приемники 10, 20, 30, показанные там.
Приемник 10 на Фиг. 5, согласующийся с описанным передатчиком 1, имеет устройство 11 оценки сигнала, которое имеет доступ к внутренней памяти 12 данных.
Устройство 11 оценки сигнала сначала выполняет первоначальную оценку принятого сигнала. Если, например, оно знает, что передатчик 1 просто повторяет символы базовой последовательности, то устройство 11 оценки сигнала осуществляет выборку только каждой второй точки принятого сигнала или оценивает только каждую вторую выборку или осуществляет выборку только в половине такта символа (при более высокой частоте выборки используется меньше, чем каждая вторая выборка). Это приводит к сокращенной пилот–последовательности, которую устройство 11 оценки сигнала сравнивает с базовыми последовательностями, хранящимися в памяти 12 данных (в конфигурации взаимной корреляции). Это дает результат оценки, который указывает, согласуется ли сокращенная пилот–последовательность с базовой последовательностью, т.е. существует ли вообще пилот–последовательность.
В положительном случае устройство 11 оценки сигнала подвергает принятый сигнал возобновленной и здесь, в частности, второй оценке, при которой оно вновь проверяет, присутствует ли пилот–последовательность. Для этого частота выборки увеличивается или оценивается больше выборок.
В целом имеет место уменьшение коэффициента корреляции для непрерывного обнаружения пилот–последовательности.
В одной конфигурации для обнаружения пилот–последовательности, выполняется модификация известных способов (например, способ корреляции с низким отклонением частоты или способ FFT при неизвестном уходе частоты), которая обладает следующими признаками.
Корреляция выполняется только для каждой RNой (где N является коэффициентом избыточной выборки, а R является натуральным числом, равным появлению символов базовой последовательности или равным числу повторений+1) выборки для последовательности выборок. В дополнение, только каждое RNое значение фильтрованного сигнала приема используется для вычисления переменных решения.
Длина корреляции уменьшается до длины базовой последовательности, которая содержится в пилот–последовательности. Применительно к пилот–последовательностям, описанным выше, корреляция уменьшается до L/R значений. Применительно к пилот–последовательностям с добавочными символами, она уменьшается до (L–1)/R или (L–2)/R символов или в общем до (L–x)/R символов для x добавочных символов.
Преимуществом является уменьшение затрат на обработку сигнала в сравнении с полной корреляцией с N–кратной избыточной выборкой.
Применительно к способу корреляции, описанному в предшествующей области техники (например, способ корреляции с низким уходом частоты), затраты (измеренные в вещественных операциях с плавающей точкой) уменьшаются c коэффициентом приблизительно 1/(NR2). Для N=2 и R=2 коэффициент уменьшения составляет, например, 1/(2*22) = 1/8.
Применительно к способу FFT, описанному в предшествующем уровне технике, затраты приблизительно уменьшаются с коэффициентом 1/(NR2)*{1–5ld(R)/(9+5ld(L))} при использовании FFT длиной L или L/R в корреляции с базовой последовательностью. Для N=2, R=2 и L=8 коэффициент уменьшений составляет, например, 1/10.
Недостаток состоит в том, что должна быть принята некоторая потеря отношения сигнала–к–шуму (SNR) в переменной решения, поскольку она соотносится с меньшим числом символов. Потеря для последовательностей без дополнительных символов составляет около 10logRдБ, следовательно, около 3дБ при R=2. Данный недостаток может быть компенсирован путем использования соответственно более длинных (ровно в R раз длиннее) пилот–последовательностей или путем использования нескольких подпоследовательностей.
Рекомендуется выполнять точную оценку ухода частоты, оптимального времени выборки и фазы на втором этапе после обнаружения на основании полного пилот–сигнала с N–кратной избыточной выборкой, при этом обычно достаточно N=2. Для того, чтобы иметь возможность доступа к отобранным значениям после обнаружения, в одной конфигурации выборка с коэффициентом N избыточной выборки требуется уже на фазе обнаружения. В результате ADC непрерывно осуществляет выборку с частотой выборки N/T значений в секунду. На фазе обнаружения главным образом уменьшаются затраты на обработку сигнала.
Приемник 20 на Фиг. 5 имеет устройство 21 обработки. Устройство 21 обработки выполнено с возможностью деления пилот–последовательности принятого сигнала на, по меньшей мере, подзоны, которые частично перекрываются друг с другом. Каждая подзона соотносится с подзонами опорных последовательностей, хранящихся в памяти 22 данных. Полученные частичные результаты объединяются в общий результат в отношении пилот–последовательности принятого сигнала.
Таким образом в данной конфигурации расширяется частичная корреляция.
В [3] описывается способ для улучшенного обнаружения при уходах частоты телеграммы с помощью нескольких пилот–(под–)последовательностей. Пилот–последовательность делится на несколько подзон, причем каждая подзона соотносится отдельно. Подразделение пилот–последовательности на отдельные подзоны или подпоследовательности показано на Фиг. 11.
На Фиг. 11 пилот–последовательность, идентифицируемая посредством P, расположена между двумя последовательностями данных, идентифицируемыми посредством D. Пилот–последовательность разделена на две дискретные подзоны, P1 и P2, для дальнейшей оценки.
Однако, в данном способе часть информации, которая лежит между двумя подзонами P1, P2, отброшена.
Чтобы улучшить возможность обнаружения определены перекрывающиеся зоны. Например, на Фиг. 12 две части пилот–последовательности с Фиг. 11 определены с перекрытием. Это увеличивает длину двух частей пилот–последовательности.
Тем не менее расширяя обе части увеличивается восприимчивость обнаружения к уходам частоты. Для достижения постоянных характеристик в сравнении с уходами частоты длина частей пилот–последовательности должна оставаться одной и той же.
На Фиг. 13, например, это достигается путем деления пилот–последовательности на более чем две подзоны. В показанной конфигурации присутствует три подзоны: P1, P2 и P3.
Частичные результаты складываются некогерентным образом так, что уходы частоты имеют меньшее влияние.
В дополнительной конфигурации осуществляется нормализация зоны перекрытия с частичной корреляцией.
Конфигурация, описанная выше, улучшает характеристики корреляции с шумом в сравнении со способом, описанным в [3]. Если, однако, появляются помехи в канале, в котором передаются сигналы, то отрицательный эффект создается перекрывающимися зонами.
Каждый символ в зоне перекрытия используется по меньшей мере дважды в корреляции, однако, символы за пределами зон перекрытия используются только один раз. Это означает, что символы в зонах перекрытия имеют более высокий вес, чем символы за их пределами. Если источник помех находится в перекрывающейся зоне, то он имеет большее влияние, чем если бы он не находился в перекрывающейся зоне.
Для того, чтобы не допускать данную проблему, в одной конфигурации символам в перекрывающейся зоне придается более низкий вес посредством нормализации, или символам за пределами зон придается более высокий вес. Вследствие этого взвешивание зависит от того, какому числу подзон принадлежит символ.
Весовые коэффициенты зависят от числа выбранных подзон и зон перекрытия.
Приемник, идентифицированный цифровым обозначением 30, имеет устройство преобразования, которое отдельно определяет преобразование Фурье для по меньшей мере двух пилот–подпоследовательностей общей пилот–последовательности или для по меньшей мере двух подпакетов пилот–последовательности. Таким образом подпакеты являются перекрывающимися или раздельными.
Устройство 31 преобразования складывает определенные преобразования Фурье некогерентным образом и формирует результат сложения, используя опорные последовательности, хранящиеся здесь в памяти 32 данных. Затем результат сложения обеспечивает формирование результата оценки для пилот–последовательности.
В одной конфигурации – это оптимизированное обнаружение с помощью способа DFT в сочетании с частичной корреляцией и, вследствие этого, оптимизация способа, показанного на Фиг. 4.
Базовый принцип обработки приемника обсуждается ниже.
Предшествующий уровень техники описывает способ FFT (способ DFT), который позволяет путем использования небольших вычислительных затрат обнаруживать пилот–последовательность при неизвестном уходе частоты в диапазоне +– 0.5 от частоты символов.
Недостаток способа DFT состоит в том, что он не может быть использован в частичной корреляции или с распределенной последовательностью синхронизации. Данную проблему обходит рассматриваемый приемник 30.
Вместо вычисления DFT (FFT) по всей последовательности синхронизации, независимые DFT или FFT вычисляются для всех подпоследовательностей частичной корреляции (таким образом подпакетов пилот–последовательности). Общий результат для обнаружения получается из некогерентного сложения частотных линий отдельных FFT или DFT. Примерами некогерентного сложения являются сложение по абсолютной величине, сложение по квадратам абсолютных величин или аппроксимация этой методологии.
Преимущество состоит в том, что путем использования FFT «корреляция» выполняется параллельно по нескольким частотам.
Более пристальный взгляд на операцию FFT (DFT) показывает, что FFT выполняет сдвиг частоты (параллельно по нескольким разным смещениям). Эти сдвинутые по частоте линии затем складываются путем суммирования. Зона поиска данного способа составляет +–0.5 частоты выборки (соответствует частоте символов).
Если разрешение FFT недостаточно точное, имеет место заполнение нулями входных данных для FFT/DFT. Это увеличивает количество частотных линий FFT/DFT. Следует отметить, что здесь нули устанавливаются либо в начале, либо в конце FFT. В качестве альтернативы заполнения нулями в альтернативной конфигурации выполняется интерполяция между максимумом и соседними позициями.
Преимущество состоит в том, что в сравнении с обычным способом FFT даже разбитые последовательности синхронизации могут быть обнаружены относительно просто, поскольку некогерентное сложение FFT/DFT исключает необходимость когерентности между последовательностями синхронизации.
Последовательности, упомянутые в вариантах осуществления, относятся к модуляции MSK, как примеру отображения, которое обладает следующими свойствами:
MSK с предварительным кодированием (matlab ‘non–diff’):
– поворот –pi/2 каждый временной шаг (== вправо == по часовой стрелке)
– вращение для данных == 1: +pi/2 == влево == против часовой стрелки
– для данных == 0: –pi/2 == вправо == по часовой стрелке
Фиг. 14 показывает иллюстрацию модуляции MSK. Показаны возможные точки созвездия у MSK с предварительным кодированием (в MATLAB также известное как non–diff MSK).
Символы, которые должны быть отправлены, таким образом, делятся на группы из четырех символов, при этом первый символ передается в момент времени T0. Соответственно точка созвездия +1+0j выбирается для двоичного нуля в момент времени T0 и точка созвездия –1+0j выбирается для двоичной единицы. Время T0 + ДT выбирается для следующего символа. Таким образом получаются точки созвездия 0+1j (двоичная единица) и 0–1j (двоичный ноль). Для следующих двух моментов времени точки созвездия вычисляются аналогичным образом. После того, как четыре символа отображены в точках созвездия, вычисление начинается вновь в момент времени T0.
Несмотря на то, что некоторые аспекты были описаны в связи с устройством, следует понимать, что эти аспекты также представляют собой описание соответствующего способа так, что блок или компонент устройства также следует понимать, как соответствующий этап способа или как признак этапа способа. Аналогично аспекты, описанные в связи с или в качестве этапа способа, являются также описанием соответствующего блока или элемента, или признака соответствующего устройства. Некоторые или все из этапов способа могут быть выполнены устройством аппаратного обеспечения (или с использованием устройства аппаратного обеспечения), таким как микропроцессор, программируемый компьютер или электронная схема. В некоторых вариантах осуществления некоторые или более из наиболее важных этапов способа могут быть выполнены таким устройством.
В зависимости от некоторых требований к реализации варианты осуществления изобретения могут быть реализованы в аппаратном обеспечении или в программном обеспечении или, по меньшей мере, частично в аппаратном обеспечении или, по меньшей мере, частично в программном обеспечении. Реализация может быть выполнена с использованием цифрового запоминающего носителя информации, такого как гибкий диск, DVD, диск BluRay, CD, ROM, PROM, EPROM, EEPROM или флэш–память, жесткий диск, или другая магнитная или оптическая память, в которой хранятся электронно–считываемые сигналы управления, которые могут взаимодействовать или взаимодействуют с программируемой компьютерной системой, чтобы выполнять соответствующий способ. Вследствие этого цифровой запоминающий носитель информации может быть машиночитаемым.
Некоторые варианты осуществления в соответствии с изобретением, таким образом, включают в себя носитель данных, содержащий электронно–считываемые сигналы управления, выполненные с возможностью взаимодействия с программируемой компьютерной системой так, что выполняется один из способов, описанных в данном документе.
В целом варианты осуществления настоящего изобретения могут быть реализованы в качестве компьютерного программного продукта с программным кодом, причем код программы эффективен для выполнения одного из способов, когда компьютерный программный продукт выполняется на компьютере.
Программный код может, например, также быть сохранен на машиночитаемом носителе.
Другие варианты осуществления включают в себя компьютерную программу для выполнения любого из способов, описанных в данном документе, при этом компьютерная программа хранится на машиночитаемом носителе информации. Другими словами, вариант осуществления способа изобретения является таким образом компьютерной программой, которая включает в себя код программы для выполнения одного из способов, описанных в этом документе, когда компьютерная программа выполняется на компьютере.
Дополнительным вариантом осуществления способов изобретения является таким образом носитель данных (или цифровой запоминающий носитель информации или машиночитаемый носитель информации) на котором записана компьютерная программа для реализации одного из способов, описанных в данном документе. Носитель данных или цифровой запоминающий носитель информации или машиночитаемый носитель информации является как правило вещественным и/или не временным.
Дополнительным вариантом осуществления способа изобретения является таким образом поток данных или последовательность сигналов, которая представляет собой компьютерную программу для исполнения одного из способов, описанных в данном документе. Поток данных или последовательность сигналов могут, например, быть выполнены с возможностью переноса через линию связи для передачи данных, например, через Интернет.
Дополнительный вариант осуществления включает в себя устройство обработки, такое как компьютер или программируемое логическое устройство, выполненное с возможностью или адаптированное для выполнения любого из способов, описанных в данном документе.
Другой вариант осуществления включает в себя компьютер, на котором инсталлирована компьютерная программа для выполнения одного из способов, описанных в данном документе.
Дополнительный вариант осуществления в соответствии с изобретением содержит устройство или систему, выполненные с возможностью передачи компьютерной программы приемнику для исполнения по меньшей мере одного из способов, описанных в данном документе. Передача может быть выполнена электронным образом или оптическим образом, например. Например, приемник может быть компьютером, мобильным устройством, запоминающим устройством или аналогичным устройством. Например, устройство или система могут включать в себя файловый сервер для передачи компьютерной программы приемнику.
В некоторых вариантах осуществления программируемое логическое устройство (такое как программируемая вентильная матрица, FPGA) может быть использовано, чтобы выполнять некоторые или все из функциональных возможностей способов, описанных в данном документе. В некоторых вариантах осуществления программируемая вентильная матрица может взаимодействовать с микропроцессором, чтобы выполнять один из способов, описанных в данном документе. В целом в некоторых вариантах осуществления способы исполняются любым устройством аппаратного обеспечения. Это может быть универсальным аппаратным обеспечением, таким как компьютерный процессор (CPU), или аппаратным обеспечением особым для процесса, таким как ASIC, или микропроцессором, таким как с архитектурой ARM.
Варианты осуществления, описанные выше, являются лишь иллюстрацией принципов данного изобретения. Само собой разумеется, что модификации и вариации компоновок и подробностей, описанных в данном документе, будут понятны специалистам в соответствующей области техники. Вследствие этого, предполагается, что изобретение ограничивается только объемом правовой защиты формулы изобретения ниже, а не конкретными подробностями, представленными в данном документе в описании и объяснении вариантов осуществления.
Список цитированной литературы
[1] Z. Y. Choi и Y. H. Lee, «Frame synchronization in the presence of frequency offset», Communications, IEEE Transactions on, том 50, номер 7, стр. 1062–1065, 2002 г.
[2] Sust, M.K. ; Kaufmann, R. F. ; Molitor, F. ; Bjornstrom, G.A.: Rapid acquisition concept for voice activated CDMA communication. В документе: IEEE Global Telecommunications Conference, 1990 Том. 3, 1990 г., стр. 1820–1826
[3] Международная заявка на патент «Optimized Preamble and Methods for Interference Robust Packet Detection for Telemetry Applications» (PCT/EP2016/057014)
[4] G. Kilian, H. Petkov, R. Psiuk, H. Lieske, F. Beer, J. Robert, и A. Heuberger, «Improved coverage for low–power telemetry systems using telegram splitting», в документе Proceedings of 2013 European Conference on Smart Objects, Systems and Technologies (SmartSysTech), 2013 г.
[5] G. Kilian, M. Breiling, H. H. Petkov, H. Lieske, F. Beer, J. Robert, и A. Heuberger, «Increasing Transmission Reliability for Telemetry Systems Using Telegram Splitting», IEEE Transactions on Communications, том 63, номер 3, стр. 949–961, март 2015 г.
[6] Wolfgang Koch, Скрипт семинара «Empfangersynchronisation (Receiver Synchronization)» на Fraunhofer IIS, 10.06.2015–15.06.2015
[7] Uwe Lambrette, Ralf Mehlan и Heinrich Meyr, Comparison of Demodulation Techniques for MSK, RWTH Aachen, https://www.ice.rwth–aachen.de/fileadmin/publications/Lambrette95TIRR.pdf, последний раз найдено: 19.09.2016
[8] Kay, Steven M.: Fundamentals of Statistical Signal Processing: Detection theory. Upper Saddle River, NJ : Prentice Hall PTR, 1998 г. ISBN 9780135041352
[9] Umberto Mengali, Aldo N. D'Andrea: «Synchronization Techniques for Digital Receivers» Plenum Press, 1997 г., ISBN 0–306–45725–3
[10] Walter Kellermann: «Digital Signal Processing", lecture notes from WS 2016/17, Chair in Multimedia Communication and Signal Processing (LMS) в Friedrich–Alexander–University Erlangen–Nuremberg.
[11] Steven M. Kay: «Fundamentals of Statistical Signal Processing – Vol. 2: Detection Theory», Prentice Hall, 1998 г. ISBN: 0–13–345711–7
[12] Z. Y. Choi и Y. H. Lee, «Frame synchronization in the presence of frequency offset», IEEE Transactions on Communications, том 50, номер 7, стр. 1062–1065, 2002 г.
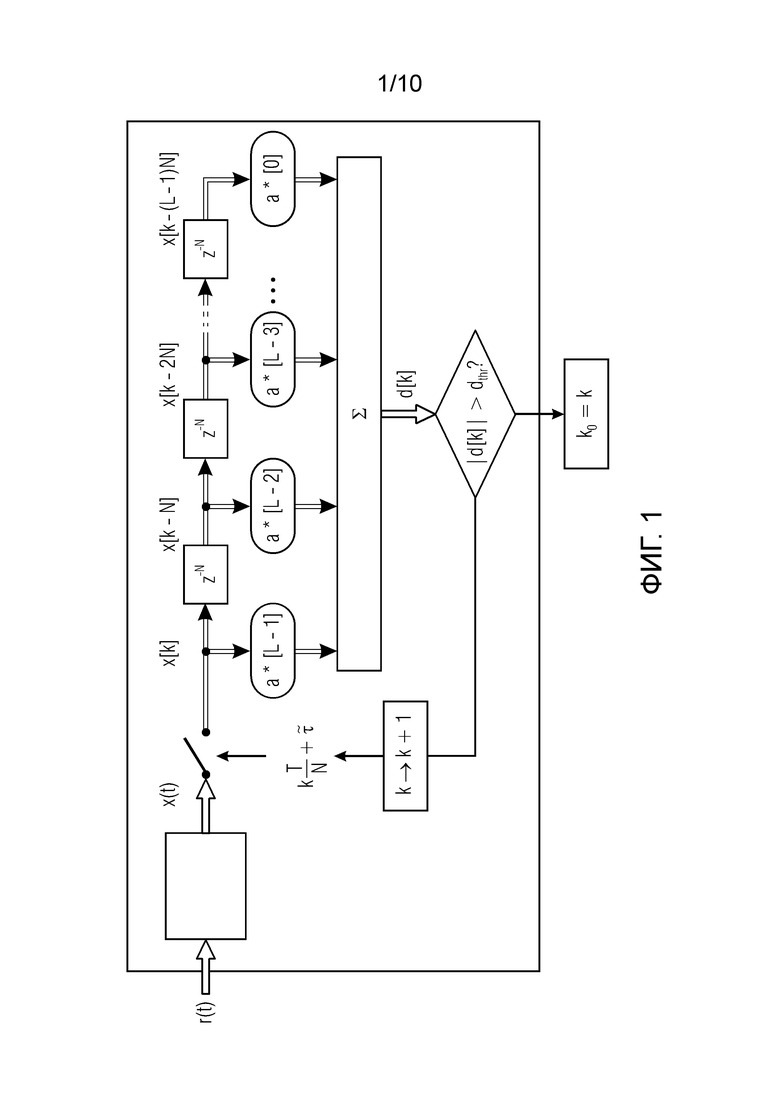
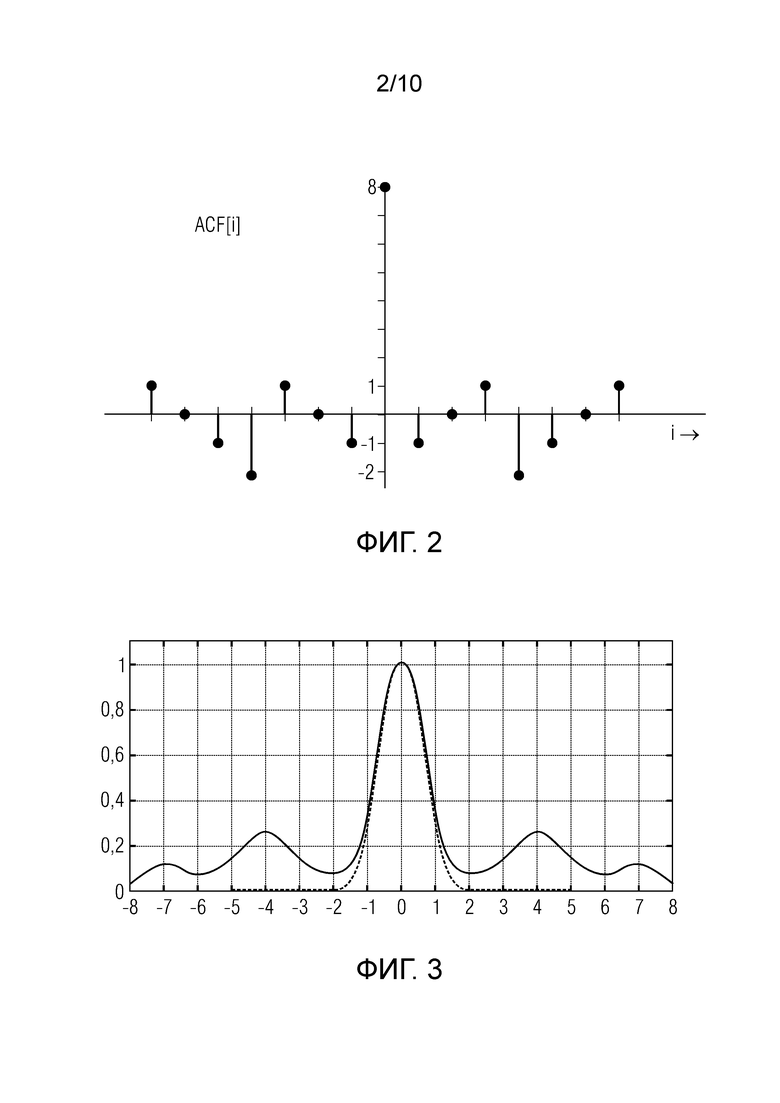


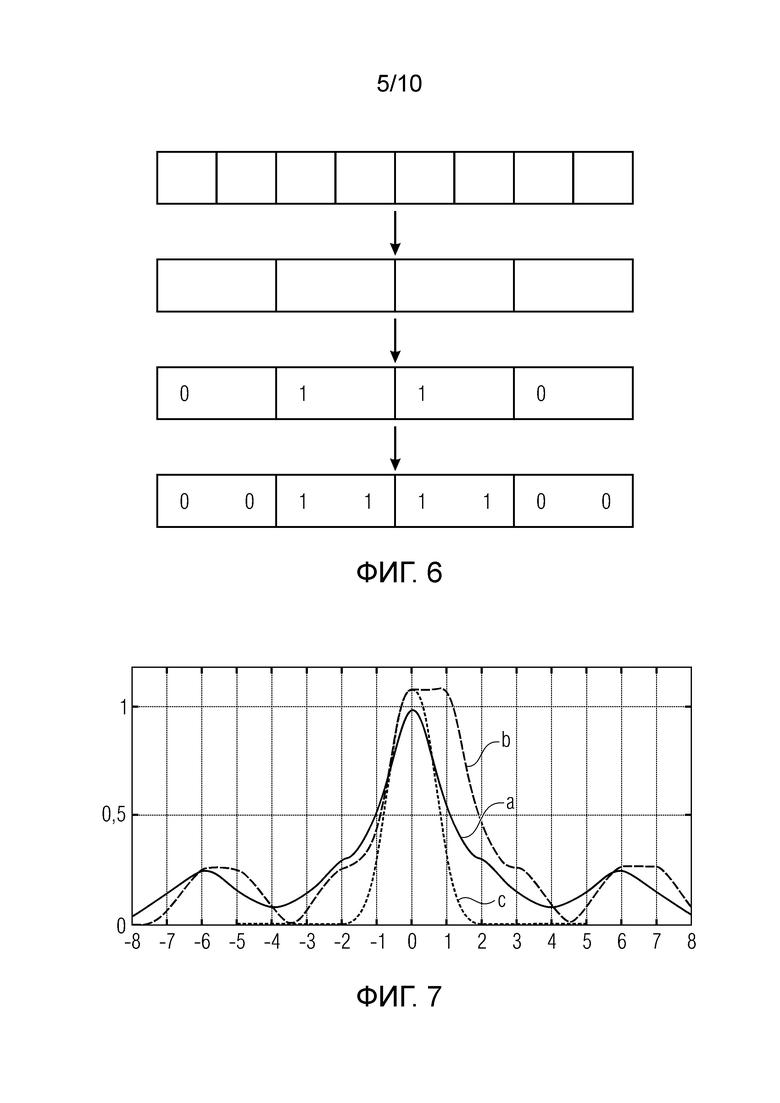
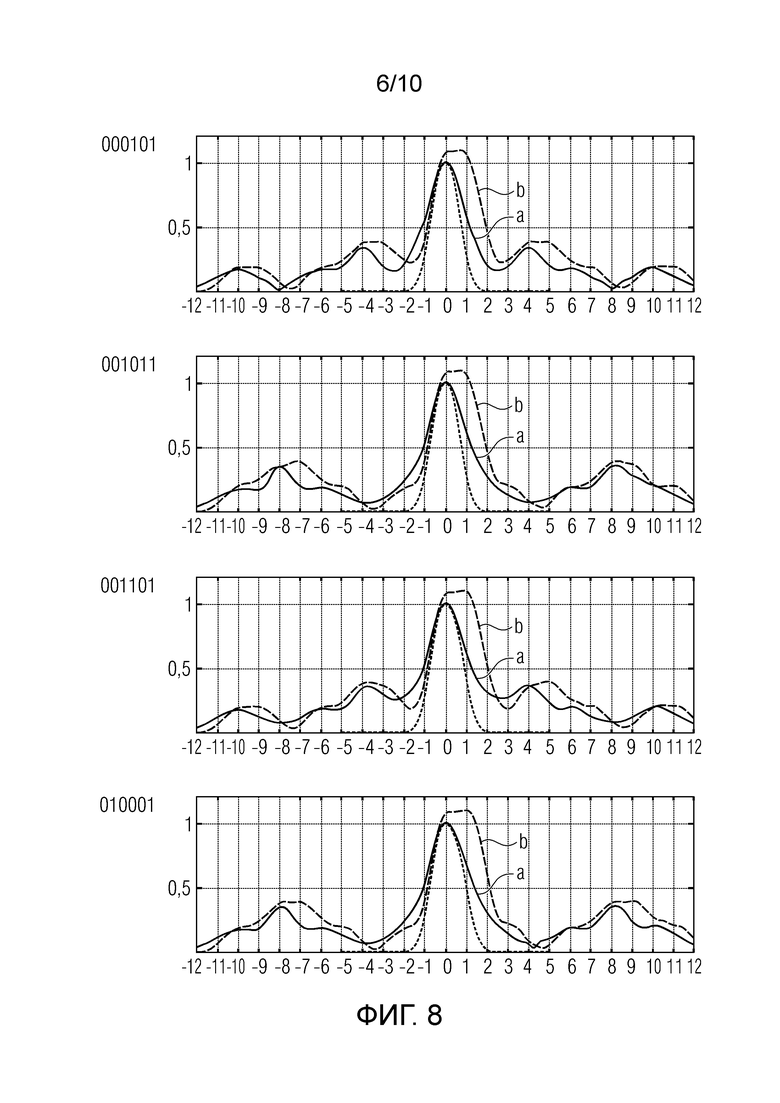

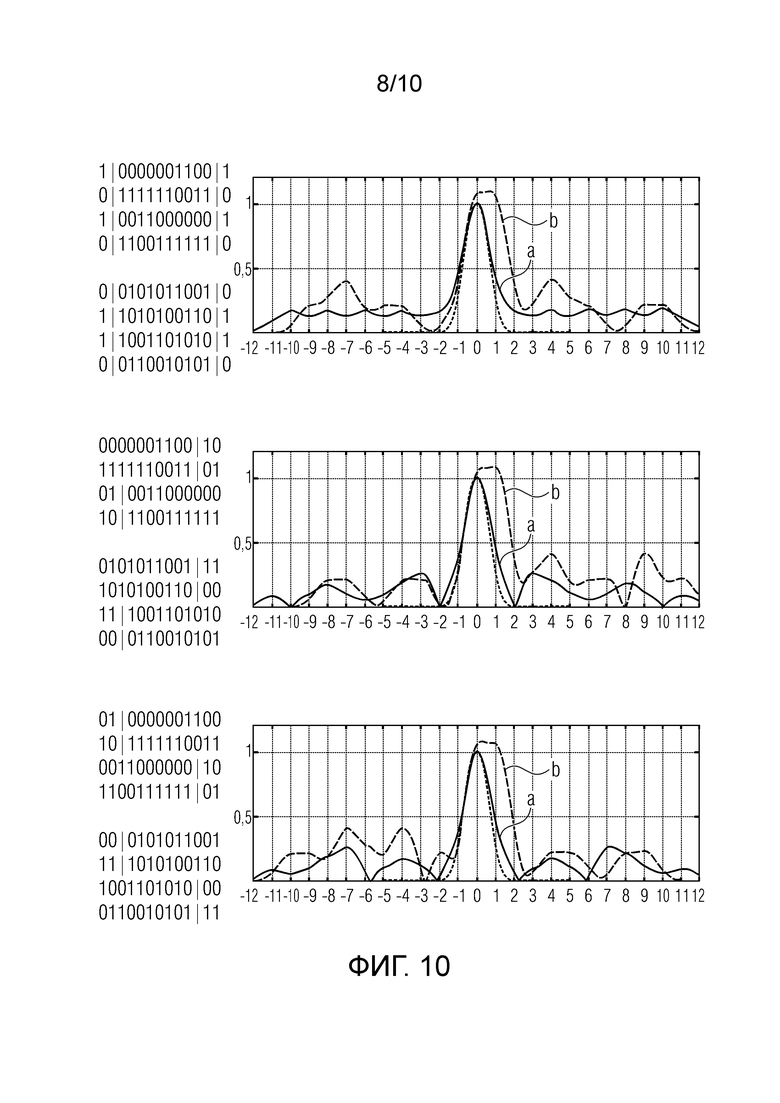


Изобретение относится к области связи. Технический результат - упрощение обнаружения и/или обработки пилот–последовательностей. Для этого передатчик (1) выполнен с возможностью передачи каждого из сигналов с пилот–последовательностью, которая содержит множество символов пилот–последовательности, при этом передатчик (1) содержит генератор (2) сигнала, при этом генератор (2) сигнала выполнен с возможностью обеспечения пилот–последовательности, начиная с базовой последовательности, которая содержит множество символов базовой последовательности, при этом генератор (2) сигнала обеспечивает символы пилот–последовательности, начиная с символа базовой последовательности, последовательно повторенного (R–1) раз, и при этом R является натуральным числом, которое больше или равно двум. 5 н. и 12 з.п. ф-лы, 14 ил., 3 табл.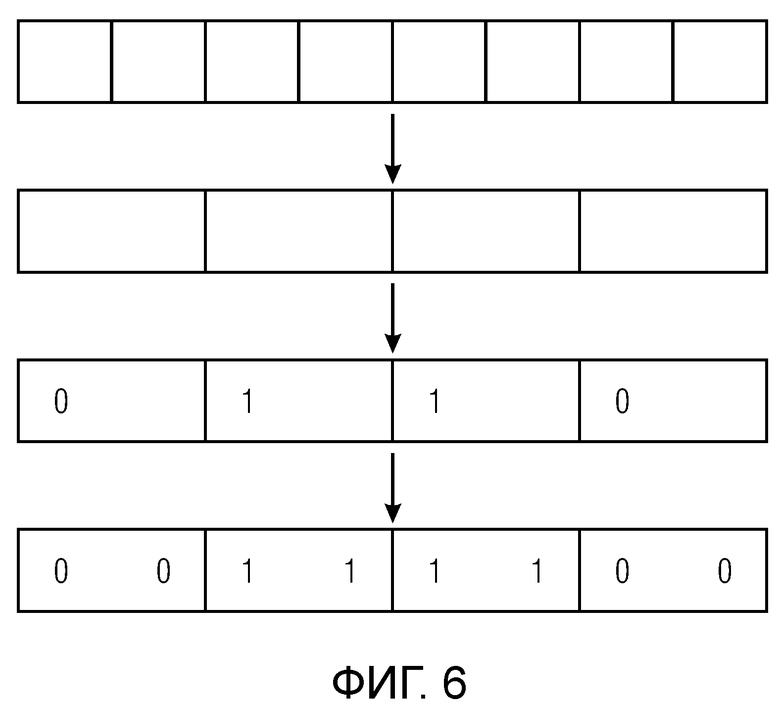
1. Передатчик (1),
при этом передатчик (1) выполнен с возможностью передачи каждого из сигналов, содержащего одну пилот–последовательность, которая содержит несколько символов пилот–последовательности,
при этом передатчик (1) содержит генератор (2) сигнала,
при этом генератор (2) сигнала выполнен с возможностью обеспечения пилот–последовательности, основанной на базовой последовательности, содержащей несколько символов базовой последовательности,
при этом генератор (2) сигнала обеспечивает пилот–последовательность с L символами пилот–последовательности путем повторения каждого символа базовой последовательности R–1 раз подряд так, что каждый символ базовой последовательности присутствует R раз,
при этом L является натуральным числом и
при этом R является натуральным числом, которое больше или равно двум и является делителем L,
при этом базовая последовательность выполнена так, что корреляция пилот–последовательности с сигналом передачи, сформированным из пилот–последовательности, содержит основной максимум, который настолько узок, насколько это возможно, и/или вторичные максимумы, которые настолько малы, насколько это возможно,
при этом пилот–последовательность содержит восемь или двенадцать символов пилот–последовательности,
при этом в случае, когда пилот–последовательность содержит восемь символов пилот–последовательности, базовая последовательность содержит одну из следующих форм:
0010, или 1101, или 0100, или 1011, и
при этом каждые из нулей и единиц являются двоичными битами базовой последовательности;
при этом в случае, когда пилот–последовательность содержит двенадцать символов пилот–последовательности, базовая последовательность содержит одну из следующих форм или форм, полученных из них путем изменения очередности битов на обратную:
000101, 001011, 001101, 010001, 111010, 110100, 110010 или 101110, и
при этом каждые из нулей и единиц являются двоичными битами базовой последовательности.
2. Передатчик (1) по п. 1,
в котором генератор (2) сигнала формирует блоки символов в пилот–последовательности так, что каждый содержит символ базовой последовательности и его (R–1) повторения, и
при этом генератор (2) сигнала формирует пилот–последовательность так, что блоки символов из символов базовой последовательности непосредственно следуют друг за другом в очередности символов базовой последовательности в упомянутой базовой последовательности.
3. Передатчик (1) по п. 1,
в котором генератор (2) сигнала в пилот–последовательности обеспечивает блоки символов так, что каждый содержит символ базовой последовательности и его (R–1) повторения, и
при этом генератор (2) сигнала обеспечивает символы базовой последовательности фазовыми множителями так, что фазовые множители соответствующего i-го появления символа базовой последовательности в блоке символов являются одними и теми же для всех блоков символов, и
при этом i является натуральным числом между 1 и R.
4. Передатчик (1) по п. 3, в котором фазовые множители являются компонентами алфавита модуляции.
5. Передатчик (1) по п. 3,
в котором в случае, когда пилот–последовательность содержит восемь символов пилот–последовательности, пилот–последовательность содержит одну из следующих форм или форм, полученных из них путем изменения очередности битов на обратную:
01011001, 10100110, 10011010, 01100101, 00001100, 11110011, 00110000, 11001111, и
при этом каждые из нулей и единиц являются двоичными битами пилот–последовательности.
6. Передатчик (1) по п. 3,
в котором в случае, когда пилот–последовательность содержит двенадцать символов пилот–последовательности, пилот–последовательность содержит одну из следующих форм или форм, полученных из них путем изменения очередности битов на обратную:
000000110011, или 111111001100, или 1100110000, или 001100111111, или 010101100110, или 101010011001, или 011001101010, или 100110010101, или 000011001111, или 111100110000, или 010110011010, или 101001100101, или 000011110011, или 111100001100, или 110011110000, или 001100001111, или 010110100110, или 101001011001, или 011001011010, или 100110100101, или 001100000011, или 110011111100, или 110000001100, или 001111110011, или 011001010110, или 100110101001, или 011010100110, или 100101011001, и
при этом каждые из нулей и единиц являются двоичными битами пилот–последовательности.
7. Передатчик (1) по п. 1,
в котором генератор (2) сигнала обеспечивает пилот–последовательность так, что пилот–последовательность имеет по меньшей мере один добавочный символ,
при этом генератор (2) сигнала обеспечивает блоки символов в пилот–последовательности так, что каждый содержит символ базовой последовательности и его (R–1) повторения, и
при этом генератор (2) сигнала обеспечивает пилот–последовательность так, что по меньшей мере один добавочный символ предшествует или следует за блоками символов.
8. Передатчик (1) по п. 7,
в котором генератор (2) сигнала формирует пилот–последовательность так, что пилот пилот–последовательность содержит по меньшей мере два добавочных символа, и
при этом генератор (2) сигнала обеспечивает пилот–последовательность так, что по меньшей мере один добавочный символ из по меньшей мере двух добавочных символов предшествует блокам символов и по меньшей мере один другой добавочный символ из по меньшей мере двух добавочных символов следует за блоками символов.
9. Передатчик (1) по п. 7,
при этом по меньшей мере один добавочный символ или по меньшей мере два добавочных символа выполнены таким образом, что корреляция пилот–последовательности с сигналом передачи, сформированным из пилот–последовательности, имеет основной максимум, который настолько узок, насколько это возможно, и/или вторичные максимумы, которые настолько малы, насколько это возможно.
10. Передатчик (1) по п. 7,
в котором в случае, когда пилот–последовательность содержит восемь символов пилот–последовательности, базовая последовательность имеет форму 001 и присутствуют два добавочных бита, которые вместе содержат одну из следующих форм:
01, или 10, или 00, или 11, и
при этом нули и единицы являются соответственно двоичными битами базовой последовательности и двоичными добавочными символами.
11. Передатчик (1) по п. 10,
при этом пилот–последовательность содержит одну из следующих форм или форм, полученных из них путем изменения очередности битов на обратную:
00001101, или 11110010, или 10110000, или 01001111, или 01011000, или 10100111, или 00011010, или 11100101, или 01000011, или 10111100, или 11000010, или 00111101, или 00010110, или 11101001, или 01101000, или 10010111, или 10000110, или 01111001, или 01100001, или 10011110, или 10011110, или 00101100, или 11010011, или 00110100, или 11001011, и
при этом каждые из нулей и единиц являются двоичными битами пилот–последовательности.
12. Передатчик (1) по п. 7,
в котором в случае, когда пилот–последовательность содержит двенадцать символов пилот–последовательности, базовая последовательность имеет форму 00010 и присутствует два добавочных бита, которые вместе содержат одну из следующих форм:
01, или 10, или 00, или 11, и
при этом каждые из нулей и единиц являются двоичными битами базовой последовательности и добавочными двоичными битами.
13. Передатчик (1) по п. 12,
в котором пилот–последовательность содержит одну из следующих форм или форм, полученных из них путем изменения очередности битов на обратную:
100000011001, или 011111100110, или 100110000001, или 011001111110, или 001010110011, или 110101001100, или 110011010100, или 001100101011, или 000000110010, или 111111001101, или 010011000000, или 1011001111, или 010101100111, или 101010011000, или 111001101010, или 000110010101, или 010000001100, или 101111110011, или 001100000010, или 1100111101, или 000101011001, или 111010100110, или 100110101000, или 011001010111, и
при этом каждые из нулей и единиц являются двоичными битами пилот–последовательности.
14. Способ для передачи сигналов,
при этом каждый из сигналов передается с пилот–последовательностью, содержащей множество символов пилот–последовательности,
при этом пилот–последовательность обеспечивается, начиная с базовой последовательности, содержащей множество символов базовой последовательности,
при этом символы пилот–последовательности обеспечиваются путем повторения каждого символа базовой последовательности R–1 раз подряд так, что каждый символ базовой последовательности присутствует R раз, при этом L является натуральным числом и при этом R является натуральным числом больше или равным двум и является делителем L; и
при этом базовая последовательность выполнена так, что корреляция пилот–последовательности с сигналом передачи, сформированным из пилот–последовательности, имеет основной максимум, который настолько узок, насколько это возможно, и/или вторичные максимумы, которые настолько малы, насколько это возможно,
при этом пилот–последовательность содержит восемь или двенадцать символов пилот–последовательности,
при этом в случае, когда пилот–последовательность содержит восемь символов пилот–последовательности, базовая последовательность содержит одну из следующих форм:
0010, или 1101, или 0100, или 1011, и
при этом каждые из нулей и единиц являются двоичными битами базовой последовательности;
при этом в случае, когда пилот–последовательность содержит двенадцать символов пилот–последовательности, базовая последовательность содержит одну из следующих форм или форм, полученных из них путем изменения очередности битов на обратную:
000101, 001011, 001101, 010001, 111010, 110100, 110010 или 101110, и
при этом каждые из нулей и единиц являются двоичными битами базовой последовательности.
15. Передатчик (1),
при этом передатчик (1) выполнен с возможностью передачи каждого из сигналов, содержащего одну пилот–последовательность, содержащую несколько символов пилот–последовательности,
при этом пилот–последовательность содержит одну из следующих форм или форм, полученных из них путем изменения очередности битов на обратную:
00001101, или 11110010, или 10110000, или 01001111, или 01011000, или 10100111, или 00011010, или 11100101, или 01000011, или 10111100, или 11000010, или 00111101, или 00010110, или 11101001, или 01101000, или 10010111, или 10000110, или 01111001, или 01100001, или 10011110, или 10011110, или 00101100, или 11010011, или 00110100, или 11001011, и
при этом каждые из нулей и единиц являются двоичными битами базовой последовательности.
16. Способ для передачи сигналов,
при этом каждый из сигналов передается с пилот–последовательностью, содержащей множество символов пилот–последовательности,
при этом пилот–последовательность содержит одну из следующих форм или форм, полученных из них путем изменения очередности битов на обратную:
00001101, или 11110010, или 10110000, или 01001111, или 01011000, или 10100111, или 00011010, или 11100101, или 01000011, или 10111100, или 11000010, или 00111101, или 00010110, или 11101001, или 01101000, или 10010111, или 10000110, или 01111001, или 01100001, или 10011110, или 10011110, или 00101100, или 11010011, или 00110100, или 11001011, и
при этом каждые из нулей и единиц являются двоичными битами базовой последовательности.
17. Машиночитаемый носитель информации, содержащий компьютерную программу, содержащую программный код для осуществления способа по п. 16.
| СТРУКТУРА ПИЛОТ-СИГНАЛА ДЛЯ УЛУЧШЕННОЙ ОЦЕНКИ КАНАЛА И ПОМЕХ | 2008 |
|
RU2411681C1 |
| СПОСОБ ПЕРЕДАЧИ ДАННЫХ В СИСТЕМЕ СВЯЗИ, АБОНЕНТ И СИСТЕМА СВЯЗИ | 2008 |
|
RU2478260C2 |
| RU 2005135636 A, 20.03.2006 | |||
| US 20090168730 A1, 02.07.2009 | |||
| Устройство для испытания трансформаторов тока в переходных режимах | 1982 |
|
SU1057884A1 |

