Область техники, к которой относится изобретение
Последующее описание относится, в общем случае, к передаче данных и, в частности, касается обнаружения сигнала и синхронизации.
Уровень техники
Существует растущая потребность в системах связи большой емкости и надежных системах связи. На данный момент трафик данных исходит, прежде всего, из мобильных телефонов, а также настольных или портативных компьютеров. По прошествии времени и с развитием технологий, возможно предвидеть повышенный спрос на другие устройства связи, некоторые из которых пока не нашли широкого распространения. Например, устройства, которые в настоящее время не рассматриваются как устройства связи, такие как бытовые приборы, а также другие потребительские устройства, в будущем будут формировать огромные объемы данных для передачи. Кроме того, существующие в текущий момент устройства, такие как мобильные телефоны и персональные цифровые секретари (PDA), среди прочих, не только будут более распространены, но также потребуют беспрецедентной пропускной способности для поддержки больших и сложных интерактивных и мультимедийных приложений.
В то время как трафик данных может передаваться по проводам, в настоящее время будет продолжать стремительно расти потребность в беспроводной передаче. Повышающаяся мобильность людей нашего общества требует, чтобы технологические решения, связанные с ними, также были портативными. Соответственно, сегодня многие люди используют мобильные телефоны и персональные PDA для передачи речи и данных (например, мобильный Интернет, электронная почта, мгновенная передача сообщений и т.д.). Дополнительно, возрастает количество людей, создающих беспроводные домашние и офисные сети, и дополнительно ожидается, что рост числа беспроводных "горячих точек" обеспечит возможность связи через Интернет в школах, зданиях кафе, аэропортах и других общественных местах. Кроме того, продолжается крупномасштабное движение в сторону интеграции компьютера и технологии связи в транспортных средствах, таких как автомобили, корабли, самолеты, поезда и т.д. В сущности, так как компьютерные технологии и технологии связи продолжают становиться более и более повсеместными, будет продолжать расти потребность в сфере беспроводных услуг, в частности, поскольку она часто является наиболее практичным и удобным средством связи.
В общем случае, процесс беспроводной связи подразумевает наличие и передатчика, и приемника. Передатчик модулирует данные на несущий сигнал и впоследствии передает этот несущий сигнал через среду передачи (например, в радиочастотном диапазоне). Тогда как приемник отвечает за прием несущего сигнала через среду передачи. Более конкретно задачей приемника является синхронизация принятого сигнала, определение начала сигнала, информации, содержащейся в сигнале, и действительно ли сигнал содержит сообщение. Однако синхронизацию усложняют шум, помехи и другие факторы. Несмотря на такие препятствия, приемник, тем не менее, должен обнаруживать или идентифицировать сигнал и интерпретировать содержимое для обеспечения возможности связи.
В настоящее время применяются многие стандартные технологии модуляции с расширением частоты. При использовании этих технологий мощность узкополосного сигнала информации разносится или расширяется на большую полосу частот передачи. Это расширение выгодно, по меньшей мере, потому что такие передачи, в основном, не восприимчивы к системному шуму из-за малой спектральной плотности мощности. Однако в таких стандартных системах одна известная проблема состоит в том, что разброс задержки вследствие многолучевого распространения порождает помехи среди множества пользователей.
Одним из стандартов, быстро получивших коммерческое принятие, является мультиплексирование с ортогональным частотным разделением сигналов (OFDM). OFDM является схемой связи с параллельной передачей, где высокоскоростной поток данных разбит на большое количество низкоскоростных потоков и передается одновременно многочисленными поднесущими, разнесенными по определенным частотам или тональным сигналам. Точный разнос частот обеспечивает ортогональность между тональными сигналами. Ортогональные частоты минимизируют или устраняют перекрестные помехи или помехи между сигналами связи. В дополнение к высоким скоростям передачи и устойчивости к помехам может быть получена высокая спектральная эффективность, поскольку частоты могут накладываться без взаимных помех.
Однако одна проблема с системами OFDM состоит в том, что они являются особенно чувствительными к ошибкам синхронизации приемника. Это может вызвать ухудшение эффективности системы. В частности, система может потерять ортогональность между поднесущими и, соответственно, между пользователями сети. Для сохранения ортогональности передатчик и приемник должны быть синхронизированы. В итоге, для успешной связи по схеме OFDM синхронизация приемника является первостепенной задачей.
Соответственно, существует потребность в новой системе и способе быстрой и надежной синхронизации начального кадра.
Сущность изобретения
Далее следует упрощенное изложение сущности изобретения, чтобы обеспечить базовое представление о некоторых аспектах и раскрытых здесь вариантах осуществления изобретения. Этот раздел не носит всеохватывающий характер и не претендует на определение ключевых/критических элементов изобретения. Единственным его назначением является представление некоторых концепций или принципов в упрощенной форме в качестве прелюдии к более подробному описанию, представленному ниже.
Согласно одному аспекту способ оценки тайминга (timing-отсчет или определение времени синхронизации) содержит этапы, на которых принимают поток входных сигналов, по меньшей мере некоторые из которых связаны с пилот-символом (символом пилот-сигнала); формируют выходные сигналы корреляции, формирующие корреляционную кривую, из указанных сигналов и их задержанных копий; обнаруживают потенциальный передний фронт корреляционной кривой из выходных сигналов корреляции; и обнаруживают задний фронт этой кривой из выходных сигналов корреляции.
Согласно другому аспекту реализованный на компьютере способ оценки тайминга содержит этапы, на которых принимают широковещательные сигналы, которые передают по меньшей мере множество символов беспроводной передачи; обнаруживают потенциальный передний фронт выходного сигнала коррелятора, связанного с первым пилот-символом; и обнаруживают задний фронт выходного сигнала коррелятора.
Согласно еще одному аспекту реализованный на компьютере способ оценки тайминга содержит этапы, на которых принимают поток широковещательных входных сигналов, по меньшей мере некоторые из которых связаны с пилот-символом; формируют выходные сигналы корреляции, которые формируют корреляционную кривую во времени, из упомянутых сигналов и их задержанных копий; обнаруживают передний фронт корреляционной кривой; и обнаруживают задний фронт корреляционной кривой.
Согласно следующему аспекту система оценки тайминга содержит компоненту коррелятора с задержкой, которая принимает поток входных выборок (выборок входных сигналов), коррелирует входные выборки с их задержанными версиями и формирует множество выходных сигналов, формирующих корреляционную кривую; компоненту переднего фронта, которая принимает выходные сигналы, сравнивает выходные сигналы с порогом и формирует сигнал, если она обнаружила потенциальный передний фронт корреляционной кривой; и компоненту заднего фронта, которая после приема сигнала от компоненты подтверждения сравнивает дополнительные выходные сигналы с порогом для определения местоположения заднего фронта корреляционной кривой.
Согласно другому аспекту система оценки тайминга содержит средство для приема потока сигналов, по меньшей мере часть из которых связана с пилот-символом; средство для формирования выходных сигналов корреляции из упомянутых сигналов и их задержанных копий; и средство для обнаружения переднего фронта и заднего фронта из выходных сигналов корреляции.
Согласно еще одному аспекту микропроцессор, исполняющий команды для выполнения способа оценки тайминга, в котором формируют метрики корреляции из выборок сигнала и их задержанных копий и обнаруживают передний фронт и задний фронт путем сравнения этих метрик с порогом.
Согласно следующему аспекту система оценки тайминга содержит первую компоненту, которая принимает множество пакетов данных, содержащих по меньшей мере пилот-символ; вторую компоненту, которая формирует метрики корреляции из пакетов данных; третью компоненту, которая анализирует метрики в течение некоторого времени для определения, был ли принят пилот-символ, причем пилот-символ принимают после обнаружения значений метрик, стабильно меньших порога первое количество раз, за которыми следуют значения метрик, больших или равных порогу второе количество раз, за которыми следуют значения метрик, стабильно меньших порога третье количество раз.
Для достижения вышеизложенных и родственных задач здесь изложены некоторые иллюстративные аспекты и варианты изобретения вместе с последующим описанием и прилагаемыми чертежами.
Краткое описание чертежей
Вышеуказанные и другие аспекты настоящего изобретения станут более очевидными из последующего подробного описания и сопроводительных чертежей, кратко описанных ниже.
Фиг.1 - блок-схема системы грубого обнаружения кадра;
Фиг.2а - график корреляционной кривой в идеальной среде однолучевого распространения;
Фиг.2b - график кривой корреляции в реальной среде многолучевого распространения;
Фиг.3 - блок-схема варианта компоненты подтверждения;
Фиг.4 - блок-схема варианта компоненты переднего фронта;
Фиг.5 - блок-схема варианта компоненты коррелятора с задержкой;
Фиг.6 - блок-схема варианта системы точного обнаружения кадра;
Фиг.7 - блок-схема методики грубого обнаружения начального кадра;
Фиг.8 - блок-схема методики обнаружения переднего фронта;
Фиг.9 - блок-схема методики подтверждения переднего фронта и обнаружения плоского участка;
Фиг.10а - блок-схема методики подтверждения переднего фронта и обнаружения плоского участка;
Фиг.10b - блок-схема методики подтверждения переднего фронта и обнаружения плоского участка;
Фиг.11 - блок-схема методики обнаружения заднего фронта;
Фиг.12 - блок-схема методики синхронизации кадра;
Фиг.13 - блок-схема операционной среды, подходящей для различных аспектов и вариантов осуществления изобретения;
Фиг.14 - диаграмма варианта осуществления структуры суперкадра для использования в системе OFDM;
Фиг.15а - диаграмма варианта пилот-сигнала 1 TDM;
Фиг.15b - диаграмма варианта пилот-сигнала 2 TDM;
Фиг.16 - блок-схема варианта осуществления процессора TX данных и пилот-сигнала на базовой станции;
Фиг.17 - блок-схема варианта модулятора OFDM на базовой станции;
Фиг.18а - диаграмм представления пилот-сигнала 1 TDM во временной области;
Фиг.18b - диаграмма представления пилот-сигнала 2 TDM во временной области;
Фиг.19 - блок-схема варианта блока синхронизации и оценки канала в беспроводном устройстве;
Фиг.20 - блок-схема варианта детектора символа тайминга, по которому выполняют временную синхронизацию на основе символа OFDM пилот-сигнала 2;
Фиг.21а - временная диаграмма обработки для символа OFDM пилот-сигнала 2 TDM;
Фиг.21b - временная диаграмма импульсной характеристики канала с L2-ответвлениями из блока IDFT;
Фиг.21с - график энергии ответвлений канала при различных начальных позициях окна;
Фиг.22 - диаграмма, иллюстрирующая схему передачи пилот-сигнала при использовании комбинации пилот-сигналов TDM и FDM;
Фиг.23 - блок-схема подробной процедуры обнаружения сигнала согласно одному варианту изобретения;
Фиг.24 - пилот-сигнал 1 TDM в частотной области согласно одному варианту изобретения;
Фиг.25 - пилот-сигнал 1 периодической формы с TDM во временной области, с периодичностью 128 выборок и с 36 периодами согласно одному варианту изобретения;
Фиг.26 - пилот-сигнал 2 с TDM в частотной области согласно одному варианту изобретения;
Фиг.27 - пилот-сигнал 2 периодической формы с TDM во временной области, с периодичностью 1024 выборки и четырьмя периодами согласно одному варианту изобретения.
Подробное описание изобретения
Далее со ссылками на прилагаемые чертежи описываются различные аспекты и варианты изобретения, в которых одинаковые ссылочные позиции относятся к одинаковым или соответствующим элементам на всех чертежах. Следует однако понимать, что эти чертежи и их подробное описание не подразумевают, что варианты осуществления изобретения ограничиваются раскрытыми здесь конкретными формами. Наоборот, изобретение покрывает все модификации, эквиваленты и альтернативные варианты.
Подразумевается, что используемые в этой заявке термины "компонента" и "система" относятся к объекту, имеющему отношение к компьютеру, любым аппаратным средствам, комбинации аппаратных и программных средств, программным средствам или программным средствам, находящимся в процессе исполнения. Например, компонентой может быть, но не только: процесс, выполняющийся в процессоре; процессор; объект; исполняемый файл; поток управления; программа и/или компьютер (например, настольный, портативный, мини, карманный...). Например, компонентой может быть как приложение, выполняющееся на компьютерном устройстве, так и само это устройство. Одна или несколько компонент могут находиться в процессе и/или потоке управления, причем компонента может быть локализована на одном компьютере и/или распределена между двумя или более компьютерами.
Кроме того, аспекты изобретения могут быть реализованы в виде способа, устройства или изделия с использованием стандартных способов программирования и/или проектирования для создания программных средств, программно-аппаратных средств, аппаратных средств или любой их комбинации с целью управления компьютером для реализации раскрытых аспектов. Подразумевается, что используемый здесь термин "изделие" (или в альтернативном варианте, "компьютерный программный продукт") распространяется на компьютерную программу, доступную с любого считываемого компьютером устройства, носителя или среды. Например, считываемая компьютером среда может включать в себя, но не только: магнитные запоминающие устройства (например, жесткий диск, гибкий диск, магнитные полосы...), оптические диски (например, компакт-диск (CD), цифровой универсальный диск (DVD), смарт-карты и устройства флэш-памяти (например, карта, стик). Вдобавок, следует понимать, что для переноса считываемых компьютером электронных данных, типа тех, что используются при передаче и приеме электронной почты или при доступе в сеть, такую как Интернет или локальная сеть (LAN), можно использовать несущую волну.
Согласно данному описанию различные аспекты изложены здесь применительно к абонентской станции. Абонентская станция также может встречаться под названием: система, абонентский блок, мобильная станция, мобильный объект, удаленная станция, точка доступа, базовая станция, удаленный терминал, терминал доступа, пользовательский терминал, пользовательский агент или пользовательское оборудование. Абонентская станция может представлять собой сотовый телефон, беспроводный телефон, телефон инициирования сеанса (SIP), станцию беспроводной местной линии (WLL), персональный цифровой секретарь (PDA), карманное устройство с возможностями беспроводного соединения или другое обрабатывающее устройство, подсоединенное к беспроводному модему.
Обратимся сначала к фиг.1, где изображена система обнаружения кадра. В частности, система 100 является подсистемой на стороне приемника, связанной с синхронизацией беспроводных передач символов (например, символов OFDM). Синхронизация в общем случае относится к процессу, выполняемому приемником для получения тайминга кадра и символа. Как более подробно описывается в последующих разделах, обнаружение кадра основано на идентификации пилот-сигнала или обучающих символов, переданных в начале кадра или суперкадра. В одном варианте пилот-символы являются мультиплексированными пилот-сигналами с временным мультиплексированием (пилот-сигналы с TDM). В частности, первый пилот-символ можно использовать в числе прочего для грубой оценки кадра у границы символа, в то время как второй пилот-символ можно использовать для улучшения указанной оценки. Система 100 в основном связана с обнаружением первого пилот-символа для обнаружения кадра, хотя ее можно использовать и при обнаружении других обучающих символов. Система 100 включает в себя компоненту 110 коррелятора с задержкой, компоненту 120 обнаружения переднего фронта, компоненту 130 подтверждения и компоненту 140обнаружения заднего фронта.
Компонента 110 коррелятора с задержкой принимает поток цифровых входных сигналов от приемника беспроводного устройства (не показан). Компонента 110 коррелятора с задержкой обрабатывает входные сигналы и создает метрики обнаружения или связанные с ними выходные сигналы (Sn) корреляции. Метрика обнаружения или выходной сигнал корреляции является индикатором энергии, связанной с одной пилотной последовательностью. Механизмы вычисления, которые создают метрики обнаружения из потоков входных сигналов, будут подробно представлены ниже.
Метрики обнаружения предоставляются компоненте 120 переднего фронта, компоненте 130 подтверждения и компоненте 140 заднего фронта для дальнейшей обработки.
Обратимся ненадолго к фигурам 2а и 2b, где для разъяснения и облегчения оценки одной из проблем, которые надо идентифицировать и разрешить, представлены две примерные диаграммы, иллюстрирующие выходные сигналы корреляции для пилот-сигнала. На корреляционных диаграммах показан выходной сигнал коррелятора, зафиксированный в виде зависимости значения метрики обнаружения в функции времени. На фиг.2а изображен выходной сигнал коррелятора в канале без шума. Хорошо видно, что выходной сигнал коррелятора имеет передний фронт и плоский участок с последующим задним фронтом. На фиг.2b показана примерная корреляционная кривая в канале, находящемся под воздействием эффектов многолучевого распространения (например, в канале имеется шум). Можно видеть, что пилот-сигнал есть, однако он искажен канальным шумом и задержкой вследствие многолучевого распространения. Для обнаружения пилот-символа принято использовать один порог. В частности, этот порог используется для определения начала символа, когда значение корреляции больше установленного или заранее определенного порога. В идеальном случае, показанном на фиг.2а, этот порог установлен близко к значению плоского участка, и символ обнаруживается тогда, когда он пересекает это значение. Затем инициируется подсчет для определения заднего фронта. В альтернативном варианте, задний фронт можно просто обнаружить, когда значения кривой становятся ниже порога. К сожалению, указанные стандартные методы и способы неэффективны в реальной среде с многолучевым распространением. Как можно видеть из фиг.2b, передний фронт трудно определить исходя из значений корреляции, так как эффекты многолучевого распространения могут вызвать разброс этих значений, а шум может дополнительно исказить передний фронт. Это может привести к появлению большого количества ошибочных положительных решений. Кроме того, разброс сигнала не способствует подсчету выборок для обнаружения переднего фронта, а шум затрудняет обнаружение заднего фронта при снижении значений ниже указанного порога. Раскрытые здесь способы обеспечивают надежную систему и способ обнаружения пилот-сигнала и кадра, который эффективен по меньшей мере в реальной среде с многолучевым распространением, охватывающей весь мир.
Вновь обратимся к фиг.1, где компонента 120 переднего фронта может быть использована для обнаружения потенциального переднего фронта корреляционной кривой (например, когда корреляционная кривая представляет распределение энергии во времени). Компонента 120 переднего фронта получает ряд значений (Sn) метрики обнаружения от компоненты 110 коррелятора с задержкой. После приема указанное значение сравнивается с фиксированным или программируемым порогом (T). В частности, определяется, выполняется ли неравенство Sn≥T. Если это неравенство выполняется, то тогда происходит приращение отсчитываемого значения или счетчика (например, счета серии). В альтернативном варианте, если Sn<T, то счетчик может быть установлен в нуль. Тем самым счетчик запоминает количество последовательных выходных значений корреляции, которые превышают порог. Компонента 120 переднего фронта контролирует этот счетчик, чтобы обеспечить анализ заранее определенного или запрограммированного количества выборок. Согласно одному варианту это может соответствовать случаю, когда подсчитанное значение серии = 64. Однако следует понимать, что это значение можно изменять для оптимизации процесса обнаружения в конкретной системе и определенной среде. Этот способ выгоден тем, что он уменьшает вероятность неправильного обнаружения переднего фронта в результате начального шума или разброса, поскольку выборки должны последовательно оставаться на уровне, превышающем порог, в течение некоторого временного интервала. Как только данное условие (условия) удовлетворяется, компонента переднего фронта может объявить об обнаружении потенциального переднего фронта. Вслед за этим в компоненту 130 подтверждения может быть подан сигнал, указывающий на обнаружение переднего фронта.
Как следует из ее названия, компонента 130 подтверждения способна подтвердить, что передний фронт действительно был обнаружен компонентой 120 переднего фронта. Вслед за передним фронтом ожидается длинный плоский интервал. Следовательно, если обнаружен плоский участок, то это укрепляет уверенность в том, что компонента 120 переднего фронта действительно обнаружила передний фронт пилот-символа. Если плоский участок не обнаружен, то тогда необходимо будет найти новый передний фронт. После приема сигнала от компоненты 120 переднего фронта компонента 130 подтверждения может приступить к приему и анализу дополнительных значений (Sn) метрики обнаружения.
Обратимся к фиг.3, где для облегчения понимания изображена блок-схема одного примерного варианта реализации компоненты 130 подтверждения. Компонента 130 подтверждения может включать в себя или быть связана с процессором 310, значением 320 порога, счетом 330 интервала, счетом 340 попаданий, счетом 350 серии и аккумулятором 360 частоты. Процессор 310 соединен с порогом 320, счетчиком 330 интервала, счетчиком 340 попаданий, счетчиком 350 серии и аккумулятором 360 частоты. Кроме того, процессор 310 способен принимать и/или извлекать значения Sn корреляции, а также взаимодействовать (например, принимать и передавать сигналы) с компонентой 120 переднего фронта (фиг.1) и компонентой 140 заднего фронта (фиг.1). Значение порога 320 может быть тем же, что было использовано компонентой 120 переднего фронта (фиг.1). Кроме того, следует отметить, что, хотя значение порога показано как часть компоненты 130 подтверждения, например, в виде жесткого кодированного значения, значение 320 порога может приниматься и/или извлекаться вне этой компоненты для облегчения, среди прочего, программирования указанного значения. Короче говоря, счет 330 интервала может быть использован при определении момента обновления системы автоматической подстройки частоты для определения сдвига частоты с использованием аккумулятора 360 частоты, а также обнаружения заднего фронта. Счет 340 попаданий может быть использован для обнаружения плоского участка символа, а счет 350 серии используют для идентификации заднего фронта.
Перед начальной обработкой значений корреляции процессор 310 может инициализировать каждый из счетчиков 330, 340 и 350, а также аккумулятор 360 частоты, установив их, например, в нуль. Затем процессор 310 может принять или извлечь выходной сигнал Sn корреляции и порог 320. Затем может быть выполнено приращение счета 330 интервала, чтобы отметить извлечение новой выборки. Приращение счета 330 интервала может выполняться с извлечением каждой новой выборки. Процессор 310 может последовательно сравнивать значение корреляции с порогом 320. Если Sn больше или равно порогу, то тогда может быть выполнено приращение значения счета попаданий. Что касается счета серии, то приращение его значения может быть выполнено, если Sn меньше порога 320, в противном случае он устанавливается в нуль. По аналогии с передним фронтом счет серии может таким образом показывать количество последовательных выборок, лежащих ниже порога. Значения счетчика могут быть проанализированы, чтобы определить, среди прочего: обнаружен ли передний фронт, было ли обнаружение неправильным или, наоборот, передний фронт был пропущен (например, пришел с опозданием).
В одном варианте компонента 130 подтверждения может определить, что компонента 120 переднего фронта в результате проверки счетчика серии и счетчика попаданий обнаружила ложный передний фронт. Поскольку компонента подтверждения должна обнаруживать плоский участок корреляционной кривой, где значения корреляции больше или равны порогу, то, если значение счета попаданий достаточно мало, значение счета серии больше установленного значения или значения счета попаданий и счета серии по существу одинаковы, то тогда можно определить, что причиной неправильного обнаружения переднего фронта возможно явился шум. В частности, можно отметить, что принятое значение корреляции не согласуется с ожидаемыми. Согласно одному варианту изобретения определение, что передний фронт ложный, возможно тогда, когда значение счета серии больше или равно 128, а значение счета попаданий меньше 400.
Компонента 130 подтверждения может определить, что передний фронт был пропущен или, в ином случае, обнаружен слишком поздно с точки зрения определения правильного тайминга путем повторного сравнения значений счета серии и счета попаданий. В частности, если значения счета попаданий и счета серии достаточно велики, то компонента 130 может определить, что вышеописанное имело место. В одном варианте это решение может быть принято, когда значение счета серии больше или равно 786, а значение счета попаданий больше или равно 400. Конечно, как и для всех приведенных здесь конкретных значений, указанные значения могут быть оптимизированы или настроены для конкретной структуры кадра и/или среды.
Необходимо понимать, что компонента 130 подтверждения может начать обнаружение переднего фронта кривой, когда она анализирует плоский участок, чтобы решить, правильно ли был обнаружен передний фронт. Если обнаружен задний фронт, то компонента подтверждения может успешно завершить свою работу. Для обнаружения заднего фронта можно использовать подсчет интервала и подсчет серии. Как было отмечено выше, значение счетчика интервала включает в себя количество принятых и коррелированных входных выборок. Известно, что длина плоского участка находится в пределах конкретного значения счета. Следовательно, если после обнаружения потенциального переднего фронта и приема правильного количества выборок для плоского участка, имеется некоторое свидетельство наличия заднего фронта, то тогда компонента подтверждения может объявить об обнаружении заднего фронта. Свидетельство наличия заднего фронта может быть предоставлено значением счетчика серии, который подсчитывает количество последовательных случаев, когда значение корреляции было ниже порога. В одном варианте компонента 130 подтверждения может объявить об обнаружении заднего фронта, когда значение счетчика интервала больше или равно 34×128 (4352), а значение счетчика серии больше или равно нулю.
Если компонента подтверждения не подтверждает обнаружение любого из трех вышеописанных условий, то тогда она может просто продолжать прием значений корреляции и обновлять значения счетчиков. При обнаружении одного из указанных условий процессор может обеспечить одну или несколько проверок счетчиков для повышения уверенности в том, что одно из условий действительно появилось. В частности, процессор 310 может потребовать минимального количества попаданий на плоском участке, которое ожидается после обнаружения переднего фронта. Например, процессор может проверить, превышает ли значение счетчика попаданий установленное значение, например 2000. Согласно одному раскрытому здесь варианту структуры кадра, ожидаемое количество попаданий на плоском участке должно составить 34×128, что больше 4000. Однако шум может исказить действительные результаты, так что ограничительное значение может быть установлено несколько меньшим, чем 4000. Если удовлетворяются дополнительные условия, то компонента 130 подтверждения может подать сигнал в компоненту заднего фронта; в альтернативном варианте компонента подтверждения может дать сигнал компоненте переднего фронта о необходимости локализации нового переднего фронта.
Также следует понимать, что компонента 130 подтверждения может предоставить дополнительные функциональные возможности, такие как сохранение моментов времени и обновление частот. Рассматриваемая система 100 обнаружения кадра (фиг.1) обеспечивает грубое обнаружение кадра и границ символа. Соответственно, в дальнейшем для обеспечения более точной синхронизации потребуется выполнение точной настройки. Следовательно, для использования в дальнейшем необходимо, чтобы система и/или способ точной настройки тайминга сохранил по меньшей мере одну временную привязку. Согласно одному варианту изобретения в качестве оценки последнего значения времени для плоского участка корреляционной кривой или момента времени непосредственно перед обнаружением заднего фронта может сохраняться каждый момент времени, когда значение счетчика серии приравнивается нулю. Кроме того, правильная синхронизация влечет за собой захват соответствующей частоты. Следовательно, процессор 310 может обновить систему автоматической подстройки частоты, используя аккумулятор 360 частоты в конкретные моменты времени, например, когда входной сигнал периодически повторяется. Согласно одному варианту система автоматической подстройки частоты может обновляться каждые 128 входных выборок, что отслеживается, например, счетчиком интервала.
Обратимся к фиг.1, где компонента 140 заднего фронта может быть использована для обнаружения заднего фронта, если он не обнаружен компонентой 130 подтверждения. В конечном счете, компонента 140 заднего фронта предназначена для обнаружения заднего фронта или просто тайм-аута, из условия, чтобы компонентой 120 переднего фронта мог быть обнаружен другой передний фронт.
Обратимся к фиг.4, где показан вариант компоненты 140 заднего фронта. Компонента 140 заднего фронта может включать в себя или быть связана с процессором 410, порогом 420, счетом 430 интервала и счетом 440 серии. По аналогии с другими компонентами для определения компонента 140 заднего фронта может принимать множество значений корреляции от компоненты 110 коррелятора с задержкой и обеспечивать приращение соответствующих значений счетчиков для облегчения обнаружения заднего фронта корреляционной кривой, связанного с первым пилот-символом (например, пилот-символ с TDM). В частности, процессор 410 может сравнить значение корреляции с порогом 420 и увеличить любое или оба отсчитываемых значения: счета 430 интервала и счета 440 серии. Следует отметить, что, хотя порог 420 показан как часть компоненты заднего фронта, он может быть получен или извлечен не из указанной компоненты, а, например, из центра размещения программ. Следует понимать, что процессор 410, конечно, может до выполнения первого сравнения инициализировать счетчик 430 интервала и счетчик 440 серии, установив их в нуль. Счетчик 430 интервала запоминает количество принятых выходных сигналов корреляции. Таким образом, процессор 410 с каждым принятым или извлеченным значением корреляции может выполнить приращение значения счетчика 430 интервала. Счетчик серии запоминает последовательное количество случаев, когда значение корреляции или выходной сигнал корреляции меньше порога 420. Если значение корреляции меньше порога, то тогда процессор 410 может выполнить приращение значения счетчика 440 серии, а в противном случае значение счетчика 440 может быть установлено в нуль. Компонента 140 заднего фронта, например, с помощью процессора 410 может проверить, удовлетворяется ли значение счетчика интервала или значение счетчика серии, используя счетчик 430 интервала и счетчик 440 серии. Например, если значение счетчика 440 серии достигло некоторого значения, компонента заднего фронта может объявить об обнаружении заднего фронта. Если это не так, то компонента 140 заднего фронта может продолжать прием значений корреляции и обновлять значения счетчиков. Однако, если значение счетчика 430 интервала становится достаточно большим, это может указывать на то, что задний фронт не будет обнаружен и необходимо локализовать новый передний фронт. В одном варианте изобретения это значение может быть равным 8×128 (1024). С другой стороны, если значение счетчика 440 серии достигло или превысило некоторое значение, это может указывать на то, что обнаружен задний фронт. Согласно одному варианту изобретения это значение может быть равно 32.
Вдобавок, следует понимать, что компонента 140 заднего фронта может также сохранять моменты времени для их использования в ходе тонкой настройки тайминга. Согласно варианту изобретения компонента 140 заднего фронта может всякий раз запоминать тот момент времени, когда значение счетчика серии равно нулю, обеспечивая тем самым момент времени непосредственно перед обнаружением заднего фронта. Согласно одному варианту и структуре кадра, описанным ниже, сохраненные моменты времени могут соответствовать 256-й выборке в следующем символе OFDM (пилот-сигнал 2 с TDM). Система точного обнаружения кадра может последовательно улучшать это значение, как это обсуждается в последующих разделах.
На фиг.5 более подробно показана компонента 110 коррелятора с задержкой согласно одному варианту изобретения. Компонента 110 коррелятора с задержкой использует периодический характер пилот-символа 1 OFDM для обнаружения кадра. В одном варианте изобретения коррелятор 110 для облегчения обнаружения кадра использует следующую метрику обнаружения:
где Sn - метрика обнаружения для периода n дискретизации;
"*" обозначает комплексное сопряжение; а
|x|2 обозначает квадрат абсолютного значения x.
По уравнению (1) вычисляется задержанная корреляция между двумя введенными выборками ri и  в двух следующих друг за другом последовательностях пилот-сигнала 1, или
в двух следующих друг за другом последовательностях пилот-сигнала 1, или  Эта задержанная корреляция устраняет воздействие канала связи без необходимости оценки усиления канала и дополнительно когерентно объединяет энергию, полученную с помощью канала связи. Затем уравнение (1) накапливает результаты корреляции для всех L1 выборок последовательности пилот-сигнала 1, чтобы получить аккумулированный результат Cn корреляции, который представляет собой комплексное значение. Затем по уравнению (1) получают метрику решения или выходной сигнал Sn корреляции для периода n дискретизации в виде квадрата величины Сn. Метрика Sn решения показывает энергию одной принятой последовательности пилот-сигнала 1 длиной L1, если есть соответствие между двумя последовательностями, использованными для задержанной корреляции.
Эта задержанная корреляция устраняет воздействие канала связи без необходимости оценки усиления канала и дополнительно когерентно объединяет энергию, полученную с помощью канала связи. Затем уравнение (1) накапливает результаты корреляции для всех L1 выборок последовательности пилот-сигнала 1, чтобы получить аккумулированный результат Cn корреляции, который представляет собой комплексное значение. Затем по уравнению (1) получают метрику решения или выходной сигнал Sn корреляции для периода n дискретизации в виде квадрата величины Сn. Метрика Sn решения показывает энергию одной принятой последовательности пилот-сигнала 1 длиной L1, если есть соответствие между двумя последовательностями, использованными для задержанной корреляции.
В компоненте 110 коррелятора с задержкой сдвиговый регистр 512 (длиной L1) принимает, запоминает и сдвигает введенные выборки {rn} и обеспечивает входные выборки  которые были задержаны на L1 периодов дискретизации. Вместо сдвигового регистра 512 можно также использовать буфер выборок. Блок 516 также принимает входные выборки и обеспечивает комплексно-сопряженные входные выборки
которые были задержаны на L1 периодов дискретизации. Вместо сдвигового регистра 512 можно также использовать буфер выборок. Блок 516 также принимает входные выборки и обеспечивает комплексно-сопряженные входные выборки  Для каждого периода n дискретизации умножитель 514 умножает задержанную входную выборку
Для каждого периода n дискретизации умножитель 514 умножает задержанную входную выборку  из сдвигового регистра 512 на комплексно-сопряженную входную выборку
из сдвигового регистра 512 на комплексно-сопряженную входную выборку
 из блока 516 и подает результат сn корреляции в сдвиговый регистр 522 (длиной L1) и сумматор 524. Строчный символcn обозначает результат корреляции для одной входной выборки, а прописной символ Cn обозначает накопленный результат корреляции для L1 входных выборок. Сдвиговый регистр 522 принимает, запоминает и задерживает результаты {cn} от умножителя 514 и обеспечивает результаты
из блока 516 и подает результат сn корреляции в сдвиговый регистр 522 (длиной L1) и сумматор 524. Строчный символcn обозначает результат корреляции для одной входной выборки, а прописной символ Cn обозначает накопленный результат корреляции для L1 входных выборок. Сдвиговый регистр 522 принимает, запоминает и задерживает результаты {cn} от умножителя 514 и обеспечивает результаты  которые были задержаны наL1 периодов дискретизации. Для каждого периода n дискретизации сумматор 524 принимает и суммирует выходные сигналы Cn-1 регистра 526 с результатом сn от умножителя 514, дополнительно вычитает задержанный результат
которые были задержаны наL1 периодов дискретизации. Для каждого периода n дискретизации сумматор 524 принимает и суммирует выходные сигналы Cn-1 регистра 526 с результатом сn от умножителя 514, дополнительно вычитает задержанный результат  из сдвигового регистра 522 и подает свой выходной сигнал Cn в регистр 526. Сумматор 524 и регистр 526 образуют аккумулятор, который выполняет операцию суммирования в уравнении (1). Сдвиговый регистр 522 и сумматор 524 также сконфигурированы для вычисления текущей или скользящей суммы L1 последних результатов корреляции с cn по
из сдвигового регистра 522 и подает свой выходной сигнал Cn в регистр 526. Сумматор 524 и регистр 526 образуют аккумулятор, который выполняет операцию суммирования в уравнении (1). Сдвиговый регистр 522 и сумматор 524 также сконфигурированы для вычисления текущей или скользящей суммы L1 последних результатов корреляции с cn по  . Это достигается посредством суммирования самого последнего результата cn корреляции от умножителя 514 и вычитания результата
. Это достигается посредством суммирования самого последнего результата cn корреляции от умножителя 514 и вычитания результата  корреляции из L1 более ранних периодов дискретизации, что обеспечивается сдвиговым регистром 522. Блок 532 возводит в квадрат величину аккумулированного выходного сигнала Сn из сумматора 524 и обеспечивает метрику Sn обнаружения.
корреляции из L1 более ранних периодов дискретизации, что обеспечивается сдвиговым регистром 522. Блок 532 возводит в квадрат величину аккумулированного выходного сигнала Сn из сумматора 524 и обеспечивает метрику Sn обнаружения.
На фиг.6 изображена система 600 точного обнаружения кадра. Система 600 включает в себя компоненту 610 точного определения тайминга и компоненту 620 декодера данных. Компонента 610 точного определения тайминга может получать момент времени, сохраненный системой 100 грубого обнаружения кадра (фиг.1). Как упоминалось выше, этот момент времени может соответствовать 256-й выборке следующего символа OFDM, который может представлять собой пилот-сигнал 2 с TDM. Это до некоторой степени оптимально для каналов с эффектами многолучевого распространения. Затем компонента 610 точного определения тайминга может использовать пилот-символ 2 с TDM для улучшения оценки (Tc) грубого определения тайминга. Имеется множество механизмов для облегчения точного определения тайминга, включая известные специалистам в данной области техники. Согласно одному приведенному здесь варианту система захвата или автоматической подстройки частоты может переключаться из режима захвата в режим слежения, который использует другой алгоритм для вычисления ошибки и другую полосу частот для контура слежения. Компонента 620 декодера данных может предпринимать попытки декодирования одного или нескольких символов OFDM данных. Это является дополнительным шагом, обеспечивающим дополнительную уверенность в том, что синхронизация состоялась. Если данные не декодируются, то должен быть найден новый передний фронт с помощью компоненты 120 переднего фронта (фиг.1). Далее раскрываются дополнительные детали, касающиеся точного определения тайминга.
В свете вышеописанных в качестве примера систем, методики, которые можно реализовать, будет легче понять, обратившись к блок-схемам на фиг.7-12. Хотя для упрощения объяснения эти методики показаны и описаны в виде последовательности блоков, должно быть ясно, что рассматриваемые методики не сводятся к показанному порядку этих блоков, а некоторые блоки могут появляться в другом порядке и/или параллельно с другими блоками в отличие от того, как это здесь показано и описано. Кроме того, для реализации предложенных методик могут потребоваться не все из показанных здесь блоков.
Вдобавок, следует также понимать, что раскрытые ниже методики и все это описание можно запомнить в некотором изделии для облегчения транспортировки и пересылки указанных методик на компьютерные устройства. Предполагается, что использованный здесь термин "изделие" распространяется на компьютерную программу, доступную с любого считываемого компьютером устройства, носителя или среды.
Обратимся к фиг.7, где показан надежный способ обнаружения начального кадра. Этот способ по существу содержит три этапа. На шаге 710 (первый этап) предпринимается попытка обнаружения переднего фронта пилот-символа. Передний фронт может быть обнаружен путем анализа множества метрик обнаружения или выходных значений корреляции, созданных коррелятором с задержкой. В частности, метрики (Sn) обнаружения или некоторые их функции (например, Sn 2...) можно сравнить с пороговым значением. Затем может быть предсказано потенциальное обнаружение переднего фронта по количеству случаев, когда метрика больше или равна порогу. На шаге 720 обнаруженный передний фронт подтверждается путем просмотра дополнительных значений корреляции и сравнения их с порогом. Здесь выходной сигнал коррелятора вновь сравнивается с порогом и отслеживается количество случаев, когда выходной сигнал коррелятора превышает порог. Процесс на этом этапе может задержаться на время, большее или равное заранее определенному периоду времени (соответствующему плоскому участку), или до обнаружения стабильного заднего фронта. Следует также заметить, что может появиться сдвиг частоты при периодическом обновлении аккумулятора частоты. Если ни одно из условий подтверждения не выполняется, то обнаружение переднего фронта считается ошибкой, и процедура может быть инициализирована и вновь запущена с шага 710. На шаге 730 предпринимается попытка заметить задний фронт, если он не был замечен ранее. Если выходной сигнал коррелятора остается ниже порога в течение нескольких последовательных выборок, например 32, то может быть объявлено об обнаружении пилот-сигнала с TDM, и при этом считается, что обнаружение начальной частоты завершено. Если это условие не выполняется, то процесс может быть инициализирован и запущен снова с шага 710. Оценка начального момента символа OFDM основана на заднем фронте. Момент времени, когда выходной сигнал коррелятора впервые оказывается ниже порога во время поиска заднего фронта, может быть взят в качестве индекса (например, 256-я выборка) в следующем символе OFDM, например, здесь это пилот-сигнал 2 с TDM.
На фиг.8 представлена блок-схема, показывающая методику 800 обнаружения переднего фронта. На шаге 810 принимаются переданные входные выборки. На шаге 820 выполняется задержанная корреляция принятого входного сигнала и его задержанной версии. Затем выходной сигнал корреляции подается в блок 830 принятия решения. На шаге 830 выходной сигнал корреляции сравнивается с фиксированным или программируемым значением порога. Если значение корреляции больше или равно порогу, то на шаге 840 выполняется приращение счета или счетчика серии. Если значение корреляции меньше значения порога, то тогда на шаге 850 значение счетчика серии устанавливают в нуль. Затем значение счета серии на шаге 860 сравнивается с заранее определенным значением, которое оптимизировано для обнаружения переднего фронта в среде с многолучевым распространением. В одном варианте это значение может быть равным 64 входным выборкам. Если значение счета серии равно заранее определенному значению, то процесс заканчивается. Если значение счета не равно указанному значению, то тогда на шаге 810 принимаются дополнительные входные значения, и процесс повторяется.
На фиг.9 представлена блок-схема методики 900 подтверждения переднего фронта. Методика 900 представляет второй этап в методике грубого или начального определения кадра, на котором подтверждается (или отвергается) обнаружение переднего фронта путем обнаружения дополнительных ожидаемых результатов, а именно: плоского участка и/или заднего фронта. На шаге 910 принимается одна из множества входных выборок. Задержанная корреляция выполняется на этой входной выборке и ее задержанной версии на шаге 920, чтобы получить выходной сигнал корреляции. Затем множество выходных сигналов коррелятора анализируется относительно программируемого порога, чтобы сделать последующие определения. На шаге 930 определяется, был ли обнаружен ложный передний фронт, что могло произойти, среди прочих причин, из-за канального шума. Такой вывод можно сделать, если имеется недостаточное количество значений выходных сигналов корреляции, превышающих порог. На шаге 940 определяется, был ли обнаружен передний фронт слишком поздно. Другими словами, передний фронт не был обнаружен до действительного вхождения в область плоского участка пилот-сигнала. На шаге 950 определяется, наблюдается ли задний фронт. Если ни одно из этих условий не подтверждается на основе выходных сигналов корреляции, принятых в прошлом, то процесс продолжается на шаге 910, где принимаются дополнительные входные выборки. Если выполняется одно любое условие, процесс может продолжаться на шаге 960, где дополнительно определяется, имел ли наблюдаемый плоский участок достаточную длину, свидетельствующую об его уверенном обнаружении. Если это так, то процедура может быть завершена. Если нет, то процесс может продолжаться с использованием другого способа, например способа 800 (фиг.8) для обнаружения нового переднего фронта на шаге 970. В одном варианте новый пилот-символ будет передаваться в течение одной секунды после предыдущего пилот-символа.
На фиг.10 показан более подробный способ 1000 обнаружения плоского участка и подтверждения обнаружения переднего фронта согласно конкретному варианту изобретения. В данном конкретном процессе используются три подсчета или счетчика: подсчет интервала, подсчет попаданий и подсчет серии. На шаге 1010 все счетчики инициализированы со значением "нуль". На шаге 1012 принимаются входные выборки. На шаге 1014 выполняется приращение значения счета интервала, что указывает на прием входной выборки. Следует также понимать, что, хотя это специально не отмечено в блок-схеме, автоматическая подстройка частоты может обновляться каждые 128 выборок, что отслеживается счетчиком интервала. На шаге 1016 выполняется задержанная корреляция с использованием входной выборки и ее задержанной во времени версии, чтобы получить выходной сигнал (Sn) корреляции. Затем на шаге 1018 определяется, больше или равно порога (Т) значение Sn. Если Sn≥T, то тогда на шаге 1020 выполняется приращение значения счетчика попаданий, и способ может продолжаться на шаге 1028. Если неравенство не выполняется, то тогда на шаге 1022 определяется, выполняется ли неравенство Sn<T. Если это так, то на шаге 1024 выполняется приращение значения счетчика серии. Если неравенство не выполняется, то тогда счетчик серии инициализируется в нуль, и этот момент времени сохраняется на шаге 1026. Таким образом, этот сохраненный момент времени обеспечивает момент времени до того, как будет замечен задний фронт. Следует понимать, что блок 1022 принятия решения здесь не является строго обязательным, а представлен для ясности, а также для того, чтобы дополнительно подчеркнуть, что порядок выполнения способа не обязательно должен быть точно таким, как здесь показано. Способ продолжается на шаге 1028, где рассматриваются значения счетчика попаданий и счетчика серии, чтобы определить, был ли обнаружен ложный передний фронт. В одном варианте это может соответствовать значению счетчика серии, большему или равному 128, и значению счетчика попаданий, меньшему 400. Если принимается решение, что был обнаружен ложный передний фронт, то процесс продолжается на шаге 1036, где локализуется новый передний фронт. Если нет возможности определить, что было принято ложное решение, то тогда процесс продолжается в блоке 1030 принятия решения. В блоке 1030 анализируются значения счетчиков серии и попаданий, чтобы определить, был ли обнаружен передний фронт слишком поздно. Согласно одному конкретному варианту это может соответствовать случаю, когда значение счетчика серии больше или равно 768, и значению счетчика попаданий, большему или равному 400. Если это именно тот случай, то процесс может продолжаться в блоке 1034. Если передний фронт не был обнаружен слишком поздно, то тогда процесс продолжается в блоке 1032, где анализируются значения счетчиков интервала и серии, чтобы определить, замечен ли задний фронт. В одном варианте это может иметь место тогда, когда значение счетчика интервала больше или равно 4352 (34×128), а значение счетчика серии больше нуля. Другими словами, был обнаружен плоский участок полной длины, и замечен провал кривой ниже порога. Если это не так, то тогда все три условия не выполняются, и процесс переходит к блоку 1012, где принимаются дополнительные входные выборки. Если условие в блоке 1032 выполняется, то тогда в блоке 1034 определяется, достаточно ли отмечено значений, превышающих порог, чтобы дать возможность согласно методике с уверенностью определить, что обнаружен плоский участок. В частности, значение счетчика попаданий превышает некоторое программируемое значение. В одном варианте это значение может быть равным 2000. Однако оно может быть до некоторой степени произвольным. В идеале в процессе необходимо зафиксировать 34×128 (4352) выборок, превышающих порог, но счетчик может прийти в нужное состояние под воздействием шума. Таким образом, программируемое значение может быть установлено на оптимальном уровне, который обеспечивает конкретную степень уверенности в том, что плоский участок обнаружен. Если значение счетчика попаданий больше предусмотренного значения, то процесс завершается. Если нет, то процесс продолжается в блоке 1036, где требуется обнаружить новый фронт.
На фиг.11 показан один вариант методики 1100 обнаружения заднего фронта. Методику обнаружения заднего фронта можно использовать для обнаружения заднего фронта корреляционной кривой, связанной с пилот-символом, если он не был обнаружен ранее. В блоке 1110 счетчики, включая счетчик интервала и счетчик серии, инициализируются в нуль. В блоке 1112 принимаются входные выборки. В блоке 1114 выполняется приращение значения счетчика интервала в соответствии с принятой выборкой. Каждая входная выборка используется коррелятором с задержкой для создания выходного сигнала Sn корреляции в блоке 1116. В блоке 1118 принимается решение, касающееся того, меньше ли выходной сигнал Sn корреляции программируемого порога (Т). Если Sn<T, то тогда выполняется приращение значения счетчика серии в блоке 1120 и процесс продолжается в блоке 1126. Если выходной сигнал корреляции не меньше порога, то тогда счетчик серии устанавливают в нуль в блоке 1122, а в блоке 1124 может быть сохранен соответствующий момент времени. В блоке 1126 принимается решение о том, достаточное ли количество выходных сигналов корреляции последовательно наблюдалось, чтобы уверенно объявить об успешной идентификации вышесказанного. В одном варианте это соответствует времени серии, большем или равном 32. Если время серии достаточно велико, то процесс может быть успешно завершен. Если время серии не достаточно велико, то процесс переходит в блок 1128 принятия решения. В блоке 1128 может быть использован счетчик интервала для определения того, следует ли прекратить реализацию способа 1100 обнаружения. В одном варианте, если значение счетчика интервала равно 8×128 (1024), то реализация способа 1100 обнаружения заднего фронта прекращается. Если реализация способа в блоке 1128 не блокируется, то тогда могут быть приняты и проанализированы дополнительные выборки, начиная снова с блока 1112. Если способ в блоке 1128 блокируется, то тогда необходимо будет обнаружить новый передний фронт пилот-сигнала в блоке 1130, так как способ 1100 не смог заметить задний фронт.
На фиг.12 показана методика 1200 синхронизации кадра. В блоке 1210 процесс сначала ожидает установку автоматической регулировки усиления (AGC). Автоматическая регулировка усиления настраивает входной сигнал, чтобы обеспечить соответствующую амплитуду или уровень сигнала, так чтобы его можно было правильно обработать. В блоке 1212 инициализируется аккумулятор автоматической подстройки частоты (FLL). В блоке 1214 обнаруживается потенциальный передний фронт. В блоке 1216 передний фронт может быть подтвержден путем определения плоского участка и/или заднего фронта. Если определено, что в блоке 1218 не был обнаружен действительный передний фронт, то тогда способ возвращается к блоку 1212. Следует понимать также, что это та точка, где может периодически обновляться автоматическая подстройка частоты с использованием аккумулятора частоты, например, для получения начального сдвига частоты. В блоке 1212 может быть обнаружен задний фронт, если он не был замечен ранее. Здесь это имеет место непосредственно перед начальным снижением заднего фронта, время появления которого может быть сохранено, чтобы использовать его позднее для точного тайминга. Если в блоке 1222 задний фронт не обнаружен, и он не был обнаружен ранее, то тогда способ возвращается к блоку 1212. Если задний фронт был обнаружен, то тогда начальное грубое обнаружение завершено. Процедура продолжается в блоке 1224, где автоматическая подстройка частоты переключается в режим слежения. Точный тайминг получают, используя второй пилот-символ с TDM и информацию, предоставленную в результате предшествующей грубой оценки в блоке 1226. В частности, сохраненный момент времени (Тс) может соответствовать конкретному сдвигу выборки во втором пилот-символе. Согласно одному варианту сохраненная выборка времени может соответствовать 256-й выборке во втором пилот-символе. Затем могут быть использованы специальные алгоритмы для улучшения этой оценки тайминга, как описано в последующих разделах. После завершения процесса определения точного тайминга могут быть извлечены один или несколько символов данных и предпринята попытка декодирования указанных символов в блоке 1228. Если в блоке 1230 декодирование оказалось успешным, то процесс завершается. В противном случае, если процесс не дал успешного результата, то согласно методике происходит возврат к блоку 1212.
Ниже обсуждается один из множества подходящих вариантов операционной среды для обеспечения контекста для вышеописанных конкретных аспектов изобретения.
Далее для большей ясности и понимания предлагается подробное описание одного варианта мультиплексированных пилот-сигналов с временным разделением: пилот-сигнал 1 с TDM и пилот-сигнал 2 с TDM.
Описанные здесь способы синхронизации могут быть использованы для различных систем с множеством несущих и для нисходящей линии связи, также как и восходящей линии связи. Нисходящая (или прямая) линия связи относится к линии связи от базовых станций к беспроводным устройствам, а восходящая (или обратная) линия связи относится к линии связи от беспроводных устройств к базовым станциям. Для ясности указанные способы описаны далее для нисходящей линии связи в системе OFDM.
На фиг.13 показана блок-схема базовой станции 1310 и беспроводного устройства 1350 в системе 1300 OFDM. Базовая станция 1310 обычно является стационарной станцией, которую также можно назвать базовой приемо-передающей системой (BTS), точкой доступа или каким-либо другим термином. Беспроводное устройство 1350 может быть стационарным или мобильным и может также называться "терминалом пользователя", "мобильной станцией" или каким-либо другим термином. Беспроводное устройство 1350 также может представлять собой портативный блок, такой как сотовый телефон, карманное устройство, беспроводный модуль, персональный цифровой секретарь (PDA) и т.п.
На базовой станции 1310 процессор 1320 данных передачи (ТХ) и пилот-сигнала принимает различные типы данных (например, данные трафика/пакетные данные и служебные/управляющие данные) и обрабатывает (например, кодирует, перемежает и выполняет символьное отображение) принятые данные для создания символов данных. Используемый здесь термин "символ данных" является модуляционным символом для данных, термин "пилот-символ" является модуляционным символом для пилот-сигнала, причем модуляционный символ является комплексной величиной для точки во множестве сигналов для некоторой схемы модуляции (например, многократная фазовая манипуляция (M-PSK), многоуровневая квадратурная амплитудная модуляция (M-QAM) и т.д.). Процессор 1320 также обрабатывает пилот-данные для создания пилот-символов и подает эти данные и пилот-символы в модулятор 1330 OFDM.
Модулятор 1330 OFDM мультиплексирует данные и пилот-символы по соответствующим субполосам и символьным периодам и, кроме того, выполняет модуляцию OFDM мультиплексированных символов для создания символов OFDM, как описано ниже. Блок 1332 передатчика (TMTR) преобразует символы OFDM в один или несколько аналоговых сигналов и дополнительно нормализует (например, усиливает, фильтрует и повышает частоту) аналоговый сигнал (сигналы) для создания модулированного сигнала. Затем базовая станция 1310 передает модулированный сигнал от антенны 1334 на беспроводные устройства в системе.
В беспроводном устройстве 1350 сигнал, переданный от базовой станции 1310, принимается антенной 1352 и подается в блок 1354 приемника (RCVR). Блок 1354 приемника нормализует (например, фильтрует, усиливает и понижает частоту) принятый сигнал и оцифровывает нормализованный сигнал, чтобы получить поток входных выборок. Демодулятор 1360 OFDM выполняет демодуляцию входных выборок по схеме OFDM для получения принятых данных и пилот-символов. Демодулятор 1360 OFDM также выполняет детектирование (например, согласованную фильтрацию) принятых символах данных с канальной оценкой (например, оценка частотной характеристики) для получения детектированных символов данных, которые являются оценками символов данных, посланных базовой станцией 1310. Демодулятор 1360 OFDM подает детектированные символы данных в процессор 1370 данных приема (RX).
Блок 1380 оценки синхронизации/канала принимает входные выборки от блока 1354 приемника и выполняет синхронизацию, чтобы определить тайминг для кадра и символа, как было описано выше и описывается ниже. Блок 1380 также получает оценку канала, используя принятые пилот-символы от демодулятора 1360 OFDM. Блок 1380 подает данные по таймингу для символа и по оценке канала в демодулятор 1360 OFDM и может предоставить тайминг кадра процессору 1370 RX данных и/или контроллеру 1390. Демодулятор 1360 OFDM использует тайминг символа для выполнения демодуляции OFDM и использует оценку канала для выполнения детектирования принятых символах данных.
Процессор 1370 RX данных обрабатывает (например, выполняет обратное символьное отображение, обращенное перемежение и декодирование) детектированные символы данных от демодулятора 1360 OFDM и обеспечивает декодированные данные. Процессор 1370 RX данных и/или контроллер 1390 может использовать тайминг кадра для восстановления данных различных типов, посланных базовой станцией 1310. В общем случае, обработка, выполняемая демодулятором 1260 OFDM и процессором 1370 RX данных, является дополнительной по отношению к обработке, выполняемой модулятором 1330 OFDM и процессором 1320 TX данных, и пилот-сигнала соответственно, на базовой станции 1310.
Контроллеры 1340 и 1390 управляют работой базовой станции 110 и беспроводного устройства 1350 соответственно. Блоки 1342 и 1392 памяти обеспечивают хранение программных кодов и данных, используемых контроллерами 1340 и 1390, соответственно.
Базовая станция 1310 может выполнить двухточечную передачу на одно беспроводное устройство, многопунктовую передачу на группу беспроводных устройств, широковещательную передачу на все беспроводные устройства, находящиеся в зоне ее покрытия, или любую их комбинацию. Например, базовая станция 1310 может транслировать пилотные данные и служебные/управляющие данные на все беспроводные устройства, находящиеся в зоне ее покрытия. Базовая станция 1310 может дополнительно передавать специальные данные для конкретных пользователей на конкретные беспроводные устройства, групповые данные на группу беспроводных устройств и/или широковещательные данные на все беспроводные устройства.
На фиг.14 показана структура 1400 суперкадра, которую можно использовать для системы 1300 OFDM. Данные и пилот-сигнал могут передаваться в суперкадрах, причем каждый суперкадр имеет заранее определенную длительность (например, одну секунду). Суперкадр также может называться кадром, временным интервалом или каким-либо другим термином. В варианте, показанном на фиг.14, каждый суперкадр включает в себя поле 1412 для первого пилот-сигнала с TDM (или "TDM пилот-сигнал 1"), поле 1414 для второго пилот-сигнала с TDM (или "TDM пилот-сигнал 2"), поле 1416 для служебных/управляющих данных и поле 1418 для данных трафика/пакетных данных.
Четыре поля с 1412 по 1418 мультиплексируются с временным разделением в каждом суперкадре, так что в любой заданный момент времени передается только одно поле. Эти четыре поля скомпонованы в порядке, показанном на фиг.14, для облегчения синхронизации и восстановления данных. Пилот-символы OFDM в полях 1412 и 1414, которые передаются первыми в каждом суперкадре, можно использовать для обнаружения служебных символов OFDM в поле 1416, которое передается далее в суперкадре. Затем служебная информация, полученная из поля 1416, может быть использована для восстановления данных трафика/пакетных данных, посланных в поле 1418, которые передаются последними в суперкадре.
В примерном варианте изобретения поле 1412 несет один символ OFDM для TDM пилот-сигнала 1, а поле 1414 также несет один символ OFDM для TDM пилот-сигнала 2. В общем случае каждое поле может иметь любую длительность, причем эти поля могут быть скомпонованы в любом порядке. TDM пилот-сигнал 1 и TDM пилот-сигнал 2 транслируются периодически в каждом кадре для облегчения синхронизации беспроводными устройствами. Служебное поле 1416 и/или поле 1418 данных также может содержать пилот-символы, которые мультиплексированы с символами данных с использованием частотного разделения, как описано ниже. Система OFDM имеет общесистемную полосу BW МГц, которая разделена на N ортогональных субполос с использованием OFDM. Интервал между соседними субполосами составляет BW/N МГц. Из общего числа N субполос M субполос можно использовать для передачи пилот-сигналов и данных, где M<N, а остальные N-M субполос могут оставаться неиспользованными и выполнять функцию защитных субполос. В одном варианте изобретения система OFDM использует структуру OFDM с N=4096 общих субполос, M=4000 используемых субполос и N-M=96 защитных субполос. В общем случае для системы OFDM может быть использована любая структура OFDM с любым количеством общих, используемых и защитных субполос.
Как было описано выше, TDM пилот-сигналы 1 и 2 могут быть предусмотрены для облегчения синхронизации, выполняемой беспроводными устройствами в системе. Беспроводное устройство может использовать TDM пилот-сигнал 1 для обнаружения начала каждого кадра, получить грубую оценку тайминга символа и оценить ошибку по частоте. Беспроводное устройство может после этого использовать TDM пилот-сигнал 2 для получения более точного тайминга для символа.
На фиг.15а показан вариант TDM пилот-сигнала 1 в частотной области. Для этого варианта TDM пилот-сигнал 1 содержит L1 пилот-символов, которые передаются в L1 субполосах, по одному пилот-символу на субполосу, используемую для TDM пилот-сигнала 1. L1 субполос равномерно распределены на N общих субполосах и равномерно разнесены друг от друга на S1 субполос, где S1=N/L1. Например, N=4096, L1=128 и S1=32. Однако для N, L1 и S1 можно также использовать другие значения. Такая структура для TDM пилот-сигнала 1 позволяет: (1) обеспечить высокую эффективность обнаружения кадра в каналах различных типов, включая сложный канал с многолучевым распространением; (2) обеспечить достаточно точную оценку ошибки по частоте и грубую оценку тайминга для символа в сложном канале с многолучевым распространением; и (3) упростить обработку в беспроводных устройствах, как описано ниже.
На фиг.15b показан вариант TDM пилот-сигнала 2 в частотной области. Для этого варианта TDM пилот-сигнал 2 содержит L2 пилот-символов, которые передаются в L2 субполосах, где L2>L1. L2 субполос равномерно распределены на N общих субполосах и равномерно разнесены друг от друга на S2 субполос, где S2=N/L2. Например, N=4096, L2=2048 и S2=2. Опять же для N, L2 и S2 можно также использовать другие значения. Такая структура для TDM пилот-сигнала 2 позволяет обеспечить точный тайминг для символа в каналах различных типов, включая сложный канал с многолучевым распространением. Беспроводные устройства также могут: (1) обрабатывать TDM пилот-сигнал 2 эффективным образом для получения тайминга для символа до прихода следующего символа OFDM, который может появиться сразу после TDM пилот-сигнала 2; и (2) применить полученный тайминг для символа к следующему символу OFDM, как описано ниже.
Для L1 используют меньшее значение, так что с помощью TDM пилот-сигнала 1 можно исправить большую ошибку по частоте. Для L2 используется большее значение, так что последовательность пилот-сигнала 2 длиннее, что позволяет беспроводному устройству получить из последовательности пилот-сигнала 2 более длинную оценку импульсной характеристики канала. L1 субполос для TDM пилот-сигнала 1 выбирают так, чтобы для TDM пилот-сигнала 1 было создано S1 идентичных последовательностей пилот-сигнала 1. Аналогичным образом L2 субполос для TDM пилот-сигнала 2 выбирают так, чтобы для TDM пилот-сигнала 2 было создано S2 идентичных последовательностей пилот-сигнала 2.
На фиг.16 показана блок-схема варианта процессора 1320 TX данных и пилот-сигнала на базовой станции 1310. В процессоре 1320 процессор 1610 TX данных принимает, кодирует, перемежает и выполняет символьное отображение данных трафика/пакетных данных для создания символов данных.
В одном варианте для создания данных для обоих TDM пилот-сигналов 1 и 2 используется генератор 1620 псевдослучайных чисел (PN). PN генератор 1620 может быть реализован, например, с помощью линейного сдвигового регистра с обратной связью (LFSR), имеющего 15 отводов, который реализует порождающий полином g(x)=x15+x14+1. В этом случае PN генератор 1620 включает в себя: (1) 15 элементов задержки с 1622а по 1622о, соединенных последовательно; и (2) сумматор 1624, подсоединенный между элементами 1622n и 1622о задержки. Элемент 1622о задержки обеспечивает пилотные данные, которые также подаются обратно на вход элемента 1622а задержки и на один вход сумматора 1624. PN генератор 1620 может быть инициализирован с различными начальными состояниями для TDM пилот-сигналов 1 и 2, например, '011010101001110' для TDM пилот-сигнала 1 и '010110100011100' для TDM пилот-сигнала 2. В общем случае для TDM пилот-сигнала 1 и 2 можно использовать любые данные. Пилотные данные могут быть выбраны так, чтобы уменьшить разницу между пиковой амплитудой и средней амплитудой пилот-символа OFDM (например, минимизировать изменение отношения пикового и среднего значений в сигнале во временной области для TDM пилот-сигнала). Пилотные данные для TDM пилот-сигнала 2 также можно создать с помощью того же PN генератора, который используется для скремблирования данных. Беспроводные устройства имеют сведения о данных, используемых для TDM пилот-сигнала 2, но им нет необходимости знать, какие данные используются для TDM пилот-сигнала 1.
Блок 1630 отображения "биты-символы" принимает пилотные данные от PN генератора 1620 и отображает биты пилотных данных в пилот-символы на основе схемы модуляции. Для TDM пилот-сигналов 1 и 2 могут быть использованы одинаковые или разные схемы модуляции. В одном варианте для обоих TDM пилот-сигналов 1 и 2 используется схема квадратурной фазовой манипуляции (QPSK). В этом случае блок 1630 отображения группирует пилотные данные в двухразрядные двоичные значения и далее отображает каждое 2-разрядное значение в определенный символ модуляции пилот-сигнала. Каждый пилот-символ является комплексной величиной во множестве сигналов для схемы модуляции QPSK. Если для TDM пилот-сигналов используется схема QPSK, то тогда блок 1630 отображения отображает 2L1 бит пилотных данных для TDM пилот-сигнала 1 в L1 пилот-символов, а затем отображает 2L2 бит пилотных данных для TDM пилот-сигнала 2 в L2 пилот-символов. Мультиплексор (Mux) 1640 получает символы данных от процессора 610 ТХ данных, пилот-символы от блока 1630 отображения и сигнал TDM_Ctrl от контроллера 1340. Мультиплексор 1640 подает в модулятор 1330 OFDM пилот-символы для полей TDM пилот-сигналов 1 и 2 и символы данных для служебного поля и поля данных каждого кадра, как показано на фиг.14.
На фиг.17 показана блок-схема варианта модулятора 1330 OFDM на базовой станции 1310. Блок 1710 отображения "символ-субполоса" принимает данные и пилот-символы процессора 1320 TX данных и пилот-сигнала и отображает эти символы в соответствующие субполосы на основе сигнала Subband_Mux_Ctrl от контроллера 1340. На каждом периоде символа OFDM блок 1710 отображения обеспечивает одни данные или пилот-символ на каждой субполосе, используемой для передачи данных или пилот-сигнала, и "нулевой символ" (который является сигналом с нулевым значением) для каждой неиспользованной субполосы. Пилот-символы, предназначенные для субполос, которые не используются, заменяются нулевыми символами. Для каждого периода символа OFDM блок 1710 отображения обеспечивает N "символов передачи" для N общих субполос, где каждый символ передачи может представлять собой символ данных, пилот-символ или нулевой символ. Блок 1720 обратного дискретного преобразования Фурье (IDFT) принимает N символов передачи для каждого периода символа OFDM, преобразует N символов передачи во временную область с помощью N-точечного преобразования IDFT и обеспечивает "преобразованный" символ, который содержит N выборок временной области. Каждая выборка является комплексной величиной, подлежащей пересылке за один период дискретизации. Вместо N-точечного преобразования IDFT также можно выполнить N-точечное обратное быстрое преобразование Фурье (IFFT), если N является степенью двух, что, как правило, имеет место в этом случае. Параллельно-последовательный (P/S) преобразователь 1730 преобразует в последовательную форму N выборок для каждого преобразованного символа. Затем генератор 1740 циклических префиксов повторяет часть (или С выборок) каждого преобразованного символа для формирования символа OFDM, который содержит N+С выборок. Циклический префикс используют для борьбы с межсимвольными помехами (ISI) и помехами между несущими (ICI), вызываемыми большим разбросом задержки в канале связи. Разброс задержки - это разница во времени между самым ранним моментом прибытия сигнала и самым поздним моментом прибытия сигнала в приемнике. Период символа OFDM (или просто "период символа") - это длительность символа OFDM, которая равна N+C периодов дискретизации.
На фиг.18а показано представление TDM пилот-сигнала 1 во временной области. Символ OFDM для TDM пилот-сигнала 1 (или "пилот-символ 1 OFDM") состоит из преобразованного символа длиной N и циклического префикса длиной С. Поскольку в L1 субполосах, которые равномерно отделены друг от друга S1 субполосами, посылается L1 пилот-символов для TDM пилот-сигнала 1 и поскольку в остальных субполосах посылаются нулевые символы, преобразованный символ для TDM пилот-сигнала 1 содержит S1 идентичных последовательностей пилот-сигнала 1, причем каждая последовательность пилот-сигнала 1 содержит L1 выборок во временной области. Каждая последовательность пилот-сигнала 1 также может быть создана путем выполнения L1 точечного преобразования IDFT L1 пилот-символов для TDM пилот-сигнала 1. Циклический префикс для TDM пилот-сигнала 1 состоит из С самых правых выборок преобразованного символа, причем этот префикс вставляется перед преобразованным символом. Таким образом, пилот-символ 1 OFDM содержит всего S1+C/L1 последовательностей пилот-сигнала 1. Например, если N=4096, L1=128, S1=32, а С=512, то тогда пилот-символ 1 OFDM будет содержать 36 последовательностей пилот-сигнала 1, причем каждая последовательность пилот-сигнала 1 содержит 128 выборок во временной области.
На фиг.18b показано представление TDM пилот-сигнала 2 во временной области. Символ OFDM для TDM пилот-сигнала 2 (или "пилот-символ 2 OFDM") также состоит из преобразованного символа длиной N и циклического префикса длиной С. Преобразованный символ для TDM пилот-сигнала 2 содержит S2 идентичных последовательностей пилот-сигнала 2, причем каждая последовательность пилот-сигнала 2 содержит L2 выборок во временной области. Циклический префикс для TDM пилот-сигнала 2 состоит из С самых правых выборок преобразованного символа, причем этот префикс вставляется перед преобразованным символом. Например, если N=4096, L2=2048, S2=2, а С=512, то тогда пилот-символ 2 OFDM будет содержать две полные последовательности пилот-сигнала 2, причем каждая последовательность пилот-сигнала 2 содержит 2048 выборок во временной области. Циклический префикс для TDM пилот-сигнала 2 будет содержать только часть последовательности пилот-сигнала 2.
На фиг.19 показана блок-схема варианта блока 1380 синхронизации и оценки канала в беспроводном устройстве 1350 (фиг.13). В блоке 1380 детектор 100 кадра (подробно описанный выше) принимает входные выборки от блока 1354 приемника, обрабатывает входные выборки для обнаружения начала каждого кадра и обеспечивает тайминг для кадра. Детектор 1920 тайминга символа принимает входные выборки и тайминг кадра, обрабатывает входные выборки для обнаружения начала принятых символов OFDM и обеспечивает тайминг для символа. Блок 1912 оценки ошибки по частоте оценивает ошибку по частоте в принятых символах. Блок 1930 оценки канала принимает выходной сигнал из детектора 1920 тайминга для символа и получает оценку канала.
Как было более подробно описано на фиг.1, детектор 100 кадра выполняет синхронизацию кадра путем обнаружения, например, TDM пилот-сигнала 1 во входных выборках от блока 1354 приемника. Для простоты в данном подробном описании предполагается, что канал связи является каналом с аддитивным белым гауссовым шумом (AWGN). Входная выборка для каждого периода дискретизации может быть выражена в виде:
rn=xn+wn, Уравнение (2)
где n - индекс периода дискретизации;
xn - выборка во временной области, посланная базовой станцией в периоде n дискретизации;
rn - входная выборка, полученная беспроводным устройством в периоде n дискретизации; и
wn - шум для периода n дискретизации.
Блок 1912 оценки ошибки по частоте оценивает ошибку по частоте в принятом пилот-символе 1 OFDM. Источниками этой ошибки по частоте могут быть, например, различие в частоте генераторов на базовой станции и в беспроводном устройстве, доплеровский сдвиг и т.д. Блок 1912 оценки ошибки по частоте может сформировать оценку ошибки по частоте для каждой последовательности пилот-сигнала 1 (кроме последней последовательности пилот-сигнала 1) следующим образом:

где  - i-я входная выборка для
- i-я входная выборка для  -й последовательности пилот-сигнала 1;
-й последовательности пилот-сигнала 1;
Arg(x) - арктангенс отношения мнимой компоненты x к действительной компоненте x, или Arg(x)=arctan[Im(x)/Re(x)];
GD - коэффициент усиления детектора, где
и  - оценка ошибки по частоте для -й последовательности пилот-сигнала 1.
- оценка ошибки по частоте для -й последовательности пилот-сигнала 1.
Диапазон обнаруживаемых ошибок по частоте может быть задан в виде

где fsamp - частота входных выборок. Уравнение (2) показывает, что диапазон обнаруживаемых ошибок по частоте зависит от и связан обратным соотношением с длиной последовательности пилот-сигнала 1. Блок 1912 оценки ошибки по частоте также можно реализовать в компоненте 100 детектора кадра, в частности, с помощью компоненты 110 коррелятора с задержкой, поскольку аккумулированные результаты корреляции также доступны от сумматора 524.
Оценки ошибки по частоте можно использовать различным образом. Например, оценку ошибки по частоте для каждой последовательности пилот-сигнала 1 можно использовать для обновления контура отслеживания частоты, который пытается исправить любую обнаруженную ошибку по частоте в беспроводном устройстве. Контур отслеживания частоты может представлять собой систему автоматической фазовой подстройки частоты (PLL), которая может регулировать частоту сигнала несущей, используемого для преобразования с понижением частоты в беспроводном устройстве. Оценки ошибки по частоте можно также усреднить, чтобы получить единую оценку Δf ошибки по частоте для пилот-символа 1 OFDM. Затем оценку Δfможно использовать для исправления ошибки по частоте либо до, либо после N-точечного преобразования DFT в демодуляторе 160 OFDM. Для исправления ошибки по частоте после преобразования DFT, которое можно использовать для исправления сдвига Δfчастоты, являющегося целым числом, кратным интервалу между субполосами, принятые символы после N-точечного преобразования DFT могут быть сдвинуты на Δfсубполос, а скорректированный по частоте символ  для каждой применяемой субполосы k можно получить в виде
для каждой применяемой субполосы k можно получить в виде  0 Для исправления ошибки по частоте перед преобразованием DFT входные выборки могут быть смещены по фазе на величину оценки Δfошибки по частоте, а затем может быть выполнено N-точечное преобразование DFT выборки со смещенной фазой.
0 Для исправления ошибки по частоте перед преобразованием DFT входные выборки могут быть смещены по фазе на величину оценки Δfошибки по частоте, а затем может быть выполнено N-точечное преобразование DFT выборки со смещенной фазой.
Обнаружение кадра и оценку ошибки по частоте также можно выполнить иным образом на основе пилот-символа 1 OFDM. Например, обнаружить кадр можно, выполнив прямую корреляцию между входными выборками для пилот-символа 1 OFDM с действительной последовательностью пилот-сигнала 1, созданной на базовой станции. Прямая корреляция обеспечивает высокое результирующее значение корреляции для каждого сильного сигнала (или многолучевого сигнала). Поскольку для данной базовой станции можно получить более одного многолучевого сигнала или пикового сигнала, беспроводное устройство будет выполнять постобработку обнаруженных пиковых сигналов для получения информации о тайминге. Обнаружение кадра также может быть обеспечено комбинированным использованием задержанной корреляции и прямой корреляции.
На фиг.20 показана блок-схема варианта детектора 1920 тайминга для символа, который выполняет временную синхронизацию на основе пилот-символа 2 OFDM. В детекторе 1920 тайминга для символа буфер 2012 выборок принимает входные выборки от блока 1354 приемника и запоминает окно "выборок" из L2 входных выборок для пилот-символа 2 OFDM. Начало окна выборок определяется блоком 2010 на основе тайминга для кадра от детектора 100 кадра.
На фиг.21 показана временная диаграмма обработки для пилот-символа 2 OFDM. Детектор 100 кадра обеспечивает грубый тайминг для символа (обозначен как TC) на основе пилот-символа 1 OFDM. Пилот-символ 2 OFDM содержит S2 идентичных последовательностей пилот-сигнала 2 длиной L2 (например, две последовательности пилот-сигнала 2 длиной 2048, если N=4096 и L2=2048). Окно из L2 входных выборок составляется буфером 912 выборок для пилот-символа 2 OFDM, начиная с периода TW. Начало окна выборок задерживается на начальный сдвиг OSinit от грубого тайминга для символа, или TW=TC+OSinit. Начальный сдвиг не обязательно должен быть точным, причем он выбирается для обеспечения сборки одной полной последовательности пилот-сигнала 2 в буфере 2012 выборок. Начальный сдвиг также можно выбрать таким образом, чтобы обработка для пилот-символа 2 OFDM могла быть закончена до поступления следующего символа OFDM, так что тайминг для символа, полученный из пилот-символа 2 OFDM, можно применить к упомянутому следующему символу OFDM.
Вновь обратимся к фиг.20, где блок 2014 DFT выполняет L2-точечное преобразование DFT для L2 входных выборок, собранных буфером 2012 выборок, и обеспечивает L2 значений в частотной области для L2 принятых пилот-символов. Если начало окна выборок не выровнено по отношению к началу пилот-символа 2 OFDM (то есть TW≠TS), то тогда импульсная характеристика канала циклически сдвигается, что означает циклический возврат передней части импульсной характеристики канала. Блок 2016 демодуляции пилот-сигнала устраняет модуляцию в L2 принятых пилот-символов, умножая принятый пилот-символ Rk для каждой субполосы k пилот-сигнала на комплексно-сопряженное значение известного пилот-символа Р* k для этой субполосы, или Rk·P* k. Блок 2016 также устанавливает нулевые значения для принятых пилот-символов для неиспользованных субполос. Затем блок 2018 IDFT выполняет L2-точечное преобразование IDFT с L2 демодулированными пилот-символами и обеспечивает L2 значений во временной области, которые представляют собой L2 элементов импульсной характеристики канала связи между базовой станцией 1310 и беспроводным устройством 1350.
На фиг.21b показана L2-элементная импульсная характеристика канала из блока 2018 IDFT. Каждый из L2 элементов связан с комплексным коэффициентом усиления канала при данной задержке элемента. Импульсная характеристика канала может циклически сдвигаться, что означает возможность циклического возврата хвостовой части импульсной характеристики канала и появление ее на начальном участке выходного сигнала блока 2018 IDFT.
Обратимся вновь к фиг.20, где блок 2020 поиска тайминга для символа может определить тайминг для символа путем поиска пикового значения энергии импульсной характеристики канала. Пик энергии может быть обнаружен путем плавного перемещения окна "обнаружения" через импульсную характеристику канала, как показано на фиг.21b. Размер окна обнаружения можно определить способом, описанным ниже. На каждой начальной позиции окна вычисляется энергия всех элементов, попавших в окно обнаружения.
На фиг.21с показан график энергии элементов канала на различных начальных позициях окна. Окно обнаружения циклически сдвигается вправо, так что, когда правый край окна обнаружения достигает последнего элемента с индексом L2, окно циклически возвращается к первому элементу с индексом 1. Таким образом, данные по энергии собираются для одинакового количества канальных элементов для каждой начальной позиции окна.
Размер LW окна обнаружения может быть выбран на основе ожидаемого разброса задержки в системе. Разброс задержки в беспроводном устройстве - это разница во времени между компонентами, характеризующими самое раннее и самое позднее поступление сигнала в беспроводном устройстве. Разброс задержки в системе - это максимальный разброс задержки среди всех беспроводных устройств системы. Если размер окна обнаружения больше или равен разбросу задержки системы, то тогда при правильном выравнивании окно обнаружения захватит всю энергию импульсной характеристики канала. Размер LW окна обнаружения также может быть задан равным не более половины от L2 (или LW≤L2/2), чтобы избежать неопределенности при обнаружении начала импульсной характеристики канала. Начало импульсной характеристики канала можно определить: (1) определив пиковую энергию из числа всех L2 начальных позиций окна; и (2) идентифицировав самую правую начальную позицию окна с пиковой энергией, если множество начальных позиций окна имеют одинаковую пиковую энергию. Энергии для различных начальных позиций окна можно также усреднить или отфильтровать для получения более точной оценки начала импульсной характеристики канала в канале с шумом. В любом случае начало импульсной характеристики канала обозначается как TB, а сдвиг между началом окна выборок и началом импульсной характеристики канала составляет TOS=TB-TW. Как только определено начало TB импульсной характеристики, можно однозначно вычислить точный тайминг для символа.
Обратимся к фиг.21а, где точный тайминг для символа указывает начало принятого символа OFDM. Точный тайминг TS для символа можно использовать для точного и правильного размещения окна "DFT" для каждого последовательно принимаемого символа OFDM. Окно DFT указывает конкретные N входных выборок (из числа N+C входных выборок) для накопления каждого принимаемого символа OFDM. Затем N входных выборок в окне DFT преобразуют с помощью N-точечного преобразования DFT, чтобы получить N принятых символов данных/пилот-символов для принятого символа OFDM. Точное размещение окна DFT для каждого принятого символа OFDM необходимо для того, чтобы избежать: (1) межсимвольных помех (ISI) от предыдущего или следующего символа OFDM; (2) ухудшения оценки канала (например, к ошибочной оценке канала может привести неправильное размещение окна DFT); (3) ошибок в процессах обработки, которые основаны на использовании циклического префикса (например, отслеживание частоты, автоматическая регулировка усиления (AGC) и т.д.) и (4) других вредных последствий.
Пилот-символ 2 OFDM также можно использовать для получения более точной оценки ошибки по частоте. Например, ошибку по частоте можно оценить, используя последовательности пилот-сигнала 2 и уравнение (3). В этом случае суммирование выполняется по L2 выборкам (вместо L1 выборок) для последовательности пилот-сигнала 2.
Импульсную характеристику канала от блока 2018 IDFT также можно использовать для получения оценки частотной характеристики для канала связи между базовой станцией 1310 и беспроводным устройством 1350. Блок 2022 принимает L2-элементную импульсную характеристику канала, циклически сдвигает импульсную характеристику канала, так чтобы начало импульсной характеристики канала имело индекс 1, вставляет соответствующее количество нулей после циклически сдвинутой характеристики канала и обеспечивает N-элементную импульсную характеристику канала. Затем блок 2024 DFT выполняет N-точечное преобразование DFT N-элементной импульсной характеристики канала и обеспечивает оценку частотной характеристики, которая содержит N комплексных значений коэффициента усиления канала для всех N субполос. Демодулятор 1360 OFDM может использовать оценку частотной характеристики для обнаружения принятых символов данных в последующих символах OFDM. Указанную оценку канала можно также получить иным образом.
На фиг.22 показана схема передачи пилот-сигнала с комбинацией пилот-сигналов с временным и частотным мультиплексированием (с TDM и FDM). Базовая станция 1310 может передавать пилот-сигналы 1 и 2 с TDM в каждом суперкадре для облегчения их начального обнаружения беспроводными устройствами. Служебными для TDM пилот-сигналов являются два символа OFDM, которые могут быть малы по сравнению с размером суперкадра. Базовая станция 1310 также может передавать пилот-сигнал с FDM во всех, в большинстве или в некоторых оставшихся символах OFDM в каждом суперкадре. Для варианта, показанного на фиг.22, пилот-сигнал с FDM посылается в альтернативных наборах субполос, так что пилот-символы посылаются в одном наборе субполос в четных периодах символа, а в другом наборе субполос в нечетных периодах символа. Каждый набор содержит достаточное количество (Lfdm) субполос для поддержки оценки канала и возможного отслеживания частоты и времени беспроводными устройствами. Субполосы в каждом наборе могут быть равномерно распределены по всем N субполосам и равно отделены друг от друга с помощью Sfdm=N/Lfdm субполос. Кроме того, субполосы в одном наборе могут быть разнесены или сдвинуты относительно субполос в другом наборе, так что субполосы в двух наборах перемежаются друг с другом. Например, если N=4096, Lfdm=512, Sfdm=8, то субполосы в двух наборах могут быть разнесены на четыре субполосы. В общем случае для пилот-сигнала с FDM можно использовать любое количество наборов субполос, причем каждый набор может содержать любое количество субполос и любую из общего количества N субполос.
Беспроводное устройство может использовать пилот-сигналы 1 и 2 с TDM для начальной синхронизации, например для синхронизации кадра, оценки сдвига частоты и получения точного тайминга для символа (с целью правильного размещения окна DFT для последовательных символов OFDM). Беспроводное устройство может выполнять начальную синхронизацию, например, при доступе к базовой станции в первый раз, при приеме или запросе данных в первый раз или после длительного периода отсутствия активности, при первом включении питания и т.д.
Беспроводное устройство может выполнять задержанную корреляцию последовательностей пилот-сигнала 1 для обнаружения наличия пилот-символа 1 OFDM и, следовательно, начала суперкадра, как было описано выше. После этого беспроводное устройство может использовать последовательности пилот-сигнала 1 для оценки ошибки по частоте в пилот-символе 1 OFDM и исправления этой ошибки по частоте до приема пилот-символа 2 OFDM. Пилот-символ 1 OFDM позволяет получить оценку большей ошибки по частоте и обеспечить более надежное размещение окна DFT для следующего символа OFDM (пилот-сигнала-2), чем стандартные способы, в которых используется структура символов данных OFDM с циклическим префиксом. Таким образом, пилот-символ 1 OFDM может обеспечить улучшенные рабочие характеристики для наземного радиоканала с большим разбросом задержки многолучевого распространения.
Беспроводное устройство может использовать пилот-символ 2 OFDM для получения точного тайминга для символа с целью более точного размещения окна DFT для последующих принимаемых символов OFDM. Беспроводное устройство может также использовать пилот-символ 2 OFDM для оценки канала и оценки ошибки по частоте. Пилот-символ 2 OFDM позволяет быстро и точно определить тайминг для символа и правильно разместить окно DFT.
Беспроводное устройство может использовать пилот-сигнал с FDM для оценки канала и отслеживания времени и возможно для отслеживания частоты. Беспроводное устройство может получить начальную оценку канала на основе пилот-символа 2 OFDM, как было описано выше. Беспроводное устройство может использовать пилот-сигнал с FDM для получения более точной оценки канала, в частности, если пилот-сигнал с FDM передается через суперкадр, как показано на фиг.11. Беспроводное устройство также может использовать пилот-сигнал с FDM для обновления системы отслеживания частоты, которая может исправлять ошибки по частоте в принятых символах OFDM. Беспроводное устройство может дополнительно использовать пилот-сигнал с FDM для обновления системы отслеживания времени, которая может учитывать дрейф временных характеристик во входных выборках (например, из-за изменений импульсной характеристики канала связи).
На фиг.23 представлена блок-схема подробной процедуры начального обнаружения согласно одному варианту изобретения. Также здесь представлены частота тайминга для символа OFDM.
Процедура начального обнаружения на основе первого пилот-символа с TDM содержит три этапа. На первом этапе обнаруживается передний фронт корреляционной кривой. В одном варианте передний фронт может быть подтвержден путем определения плоского участка и/или заднего фронта. В альтернативном варианте передний фронт не подтверждается, а предполагается.
На шаге 2302 процесс находится в состоянии ожидания установки автоматической регулировки усиления (AGC). AGC регулирует входной сигнал, обеспечивая согласованную величину или уровень сигнала, так чтобы сигнал можно было правильно обработать. На шаге 2304 инициализируется аккумулятор частоты с системой автоматической подстройки частоты (FLL) и инициализируется счетчик серии с установкой в нуль. Счетчик серии подсчитывает количество последовательных входных выборок.
На шаге 2306 квадрат величины выходного сигнала S коррелятора сравнивается с программируемым порогом T. В частности, на шаге 2306 процесс для каждой новой входной выборки выполняет задержанную корреляцию, и, если  то тогда выполняется приращение значения счетчика серии, а в противном случае этот счетчик повторно инициализируется с установкой в нуль. Sn обозначает выходной сигнал коррелятора для выборки n.
то тогда выполняется приращение значения счетчика серии, а в противном случае этот счетчик повторно инициализируется с установкой в нуль. Sn обозначает выходной сигнал коррелятора для выборки n.
На шаге 2308, если выходной сигнал коррелятора превышает порог для 64 последовательных входных выборок согласно одному варианту изобретения, то тогда алгоритм переходит ко второму этапу процесса обнаружения. В противном случае, процесс переходит к блоку 2306. Таким образом, если определено, что на шаге 2308 не был обнаружен действительный передний фронт, то процесс возвращается к шагу 2306. В альтернативном варианте шаг 2308 не содержится, поскольку передний фронт считается обнаруженным и не подтверждается.
На втором этапе, на шаге 2310 счетчики интервала, попаданий и серии инициализируются в нуль. На втором этапе выполняется приращение значения счетчика серии на единицу каждый раз, когда выходной сигнал коррелятора превышает порог. Алгоритм возвращается в начальное состояние после обнаружения того, что замеченный передний фронт был ложным. Алгоритм остается на втором этапе в течение времени, большего или равного заранее определенному периоду, или пока не будет замечен соответствующий задний фронт корреляционной кривой. Если выходной сигнал коррелятора остается ниже порогового значения в течение 768 последовательных входных выборок, то алгоритм выходит из второго этапа. Когда алгоритм находится на втором этапе, осуществляется захват начальной частоты. На втором этапе система FLL обновляется один раз за каждые 128 входных выборок.
На шаге 2312 для каждой новой входной выборки выполняется задержанная корреляция, и выполняется приращение значения счетчика интервала. Если  то тогда происходит приращение значения счетчика попаданий. Если
то тогда происходит приращение значения счетчика попаданий. Если  то происходит приращение значения счетчика серии, в противном случае счетчик серии повторно инициализируется в нуль. Когда значение счетчика серии равно нулю, этот момент времени сохраняется и используется в качестве указателя буфера. Система FLL обновляется, когда значение счетчика интервала меньше или равно 32×128, и значение счетчика интервала по модулю 128 равно нулю.
то происходит приращение значения счетчика серии, в противном случае счетчик серии повторно инициализируется в нуль. Когда значение счетчика серии равно нулю, этот момент времени сохраняется и используется в качестве указателя буфера. Система FLL обновляется, когда значение счетчика интервала меньше или равно 32×128, и значение счетчика интервала по модулю 128 равно нулю.
На шаге 2314 выполняется проверка, чтобы определить, выполняются ли неравенства (значение счетчика серии ≥128 и значение счетчика попаданий <400) или (значение счетчика серии ≥768 и значение счетчика попаданий ≥400) или (значение счетчика интервала ≥34×128 и значение счетчика серии >0). Если это так, то процесс управления переходит к шагу 2316. В противном случае, процесс управления переходит к шагу 2312.
На шаге 2316 определяется, больше или равно 2000 значение счетчика попаданий. Если это так, то процесс обнаружения переходит к шагу 2318. Следует также понимать, что это именно та точка, где может быть обновлена система автоматической подстройки частоты на основе периодического использования аккумулятора частоты, например, для получения начального сдвига частоты. Если указанное условие не выполняется, то процесс управления переходит к шагу 2304.
На шаге 2318 значение счетчика интервала повторно инициализируется в нуль. Для каждой новой входной выборки выполняется задержанная корреляция, и происходит приращение значения счетчика интервала. Если (|Sn|2<T), то происходит приращение значения счетчика серии, в противном случае выполняется повторная инициализация счетчика серии в нуль. Момент времени, когда значение счетчика серии равно нулю, сохраняется.
На шаге 2320 выполняется проверка, чтобы определить, выполняется ли условие: значение счетчика интервала =8×128 или значение счетчика серии ≥32. Если это условие не выполняется, то процесс управления переходит к шагу 2318. Если выполняется, то процесс управления переходит к шагу 2322. На шаге 2322 осуществляется проверка, чтобы определить, выполняется ли неравенство: значение счетчика серии ≥32. Если это неравенство не выполняется, то процесс управления переходит к шагу 2304. Если выполняется, то процесс управления переходит к шагу 2324.
На шаге 2324 объявляется об обнаружении, причем сохраненный момент соответствует 256-й выборке в следующем символе OFDM. На шаге 2326 система FLL переключается в режим слежения. Точный тайминг получают, используя пилот-сигнал 2. На шаге 2328 декодируются символ служебной информации (OIS) и N символов данных.
На шаге 2330 выполняется проверка, чтобы определить, было ли успешным декодирование OIS/данных. Если это не так, то процесс управления переходит к шагу 2304, если это так, то процесс захвата завершается.
На шаге 2320 может быть обнаружен задний фронт, если он не был замечен ранее. Здесь это происходит как раз перед первоначальным падением заднего фронта, причем этот момент может быть сохранен с целью использования в дальнейшем для точного тайминга. Если на шаге 2322 задний фронт не обнаружен и он не был обнаружен ранее, то способ возвращается к шагу 2304. Если задний фронт был обнаружен, то начальное грубое обнаружение завершилось. Процедура продолжается на шаге 2326, где система автоматической подстройки частоты переключается в режим слежения. Точный тайминг получают, используя второй TDM пилот-символ и информацию, обеспеченную предыдущей грубой оценкой. В частности, сохраненный момент времени (Tc) может соответствовать конкретному сдвигу выборки во втором пилот-символе. Согласно одному варианту изобретения сохраненная выборка времени может соответствовать 256-й выборке во втором пилот-символе. Затем можно использовать специальные алгоритмы для улучшения оценки тайминга, как описано ниже. После завершения получения точного тайминга может быть извлечен один или несколько символов данных и на шаге 2328 может быть предпринята попытка декодировать указанные символы. Если на шаге 2330 выясняется, что декодирование было успешным, то процесс завершается. Однако в случае, если процесс не был успешным, то согласно методике происходит возврат к шагу 2304.
Третий этап предназначен для обнаружения заднего фронта, если он не был уже замечен на втором этапе. На третьем этапе, если выходной сигнал коррелятора остается ниже порогового значения для как минимум 32 последовательных входных выборки и значение счетчика попаданий в течение второго этапа превысило другой программируемый порог, то тогда объявляется об обнаружении TDM пилот-сигнала 1 и начальный захват частоты считается завершенным. Оценка начального момента символа OFDM базируется на заднем фронте. За момент времени, когда выходной сигнал коррелятора первый раз за время поиска заднего фронта находится ниже порога, принимается 256-я выборка следующего символа OFDM (TDM пилот-сигнал 2). Если обнаружено, что значение счетчика попаданий ниже программируемого порога или соответствующий задний фронт во время периода ожидания, соответствующего 1024 входным выборкам, на третьем этапе не наблюдается, то алгоритм устанавливает счетчики и аккумулятор частоты с FLL в начальное состояние и возвращается к первому этапу, на котором выполняется поиск другого переднего фронта.
После успешного определения TDM пилот-символа 1 пилот-символ 2 используют для получения точного тайминга для символа OFDM. После этого предпринимается попытка декодировать символы OIS и N последовательных символов OFDM данных. Контур AFC работает в режиме слежения после первого TDM пилот-сигнала. Если не удалось декодировать символ OIS и OFDM данных, то считается, что контур AFC не смог обеспечить сходимость, и весь процесс захвата повторяется во время следующего кадра.
В подробном варианте структура кадра включает в себя два TDM пилот-символа для получения начальной синхронизации по времени, частоте и кадру. Известно, что TDM пилот-символы предназначены для начального захвата. Пилот-символы находятся в начале каждого суперкадра перед полем сигнала OIS.
Первый TDM пилот-символ имеет 125 ненулевых поднесущих в частотной области. Эти ненулевые поднесущие отделены друг от друга равными интервалами. Каждая пара последовательных ненулевых поднесущих разделена 31 нулевыми поднесущими. Первой ненулевой поднесущей присваивается частотный индекс 16. Для двоичной модуляции ненулевых поднесущих используется PN последовательность длиной 125. Такая структура в частотной области приводит к периодической последовательности во временной области с периодичностью, равной 128 выборкам. Таким образом, первый пилот-символ во временной области имеет 36 реплик (включая циклический префикс) последовательности длиной 128. Такая структура пилот-сигнала не только упрощает реализацию, но также хорошо подходит для оценки частоты и обнаружения границы кадра в сложном канале с многолучевым распространением.
Хотя первый пилот-сигнал может обеспечить достаточно точную оценку частоты в сложном канале с многолучевым распространением, он не может обеспечить точный тайминг для символа OFDM в указанном канале, а может обеспечить лишь грубый тайминг для символа OFDM наряду с границей кадра. Второй пилот-символ введен для получения точного тайминга для символа OFDM. Его структура выбрана с целью совместного использования тех же аппаратных ресурсов, что предназначены для отслеживания временных параметров символа. Напомним, что при отслеживании временных параметров символа используется 1000 поднесущих FDM пилот-сигнала на двух соседних символах OFDM. Второй TDM пилот-символ имеет 1000 ненулевых поднесущих в частотной области в местах, соответствующих разнесенным местам FDM пилот-сигнала в двух соседних символах OFDM данных. Поднесущие пилот-сигнала отделены друг от друга одинаковыми интервалами, причем каждая пара ненулевых поднесущих разделена тремя нулевыми поднесущими. Первой поднесущей пилот-сигнала присваивается частотный индекс 48. Для двоичной модуляции поднесущих пилот-сигнала используется PN последовательность длиной 1000. Указанная структура в частотной области приводит к периодической последовательности во временной области с периодичностью, равной 1024 выборкам. Таким образом, второй пилот-символ во временной области имеет 4 реплики (включая циклический префикс) последовательности длиной 1024. Эта структура многократно использует те же аппаратные средства, которые используются для отслеживания временных параметров символа, и обеспечивает получение точного тайминга для символа во втором пилот-символе.
Необходимо получить начальный сдвиг частоты с показателем неопределенности 2 при чувствительности усиления генератора VCXO. Вдобавок, предполагается, что постоянная времени широтно-импульсной модуляции (PDM) составляет 68 микросекунд.
Специалистам в данной области техники очевидно, что можно использовать другие значения, отличные от указанных выше в подробном варианте осуществления изобретения.
Согласно одному варианту изобретения структура кадра с TDM пилот-сигналами и структура пилот-символов в частотной и временной областях показаны на фигурах с 24 по 27.
На фиг.24 показан TDM пилот-сигнал 1 в частотной области согласно одному варианту изобретения. Каждая из 32 поднесущих является ненулевой. Здесь показаны 4096 поднесущих 2402. На фиг.25 показан TDM пилот-сигнал 1 периодической формы во временной области согласно одному варианту изобретения с периодичностью 128 выборок и 36 периодами. Здесь показано 128 выборок 2502. На фиг.26 показан TDM пилот-сигнал 2 в частотной области согласно одному варианту изобретения. Каждая четвертая поднесущая является ненулевой. Здесь показаны 4096 поднесущих 2602. На фиг.27 показан TDM пилот-сигнал-2 периодической формы во временной области согласно одному варианту изобретения с периодичностью 1024 выборки и четырьмя периодами. Здесь показано 512 выборок 2702 и 1024 выборки 2704.
Описанные здесь способы синхронизации могут быть реализованы различными путями. Например, эти способы могут быть реализованы аппаратными средствами, программными средствами или их комбинацией. При аппаратной реализации блоки обработки на базовой станции, используемые для поддержки синхронизации (например, процессор 120 TX данных и пилот-сигнала) могут быть реализованы в одной или нескольких прикладных специализированных интегральных схемах (ASIC), цифровых процессорах сигналов (DSP), устройствах для обработки цифровых сигналов (DSPD), программируемых логических устройствах (PLD), вентильных матрицах, программируемых пользователем (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных блоках, предназначенных для выполнения вышеописанных функций, или их комбинации. Блоки обработки в беспроводном устройстве, используемые для выполнения синхронизации (например, блок 180 синхронизации и оценки канала), также могут быть реализованы в одной или нескольких ASIC, DSP и т.д.
При программной реализации способы синхронизации могут быть реализованы в комбинации с программными модулями (например, подпрограммы, программы, компоненты, процедуры, функции, структуры данных, схемы, ...), которые выполняют различные вышеописанные функции. Программные коды могут храниться в блоке памяти (например, блок 1392 памяти на фиг.13) и выполняться процессором (например, контроллером 190). Блок памяти может быть реализован в процессоре или вне процессора. Кроме того, специалистам в данной области техники очевидно, что предложенные в изобретении способы можно реализовать на практике с помощью других конфигураций компьютерной системы, в том числе, с помощью однопроцессорных или многопроцессорных компьютерных систем, мини-ЭВМ, универсальных компьютеров, а также персональных компьютеров, карманных вычислительных устройств, бытовых электронных устройств на базе микропроцессоров или программируемых бытовых электронных устройств и т.п.
Используемая здесь схема OFDM может включать в себя архитектуру множественного доступа с ортогональным частотным разделением каналов, где множество пользователей совместно используют каналы OFDM.
Вышеприведенное описание включает в себя примеры различных аспектов и вариантов осуществления изобретения. Конечно, невозможно описать каждую возможную комбинацию компонент или методик. Специалисты в данной области техники без труда предложат различные модификации для этих вариантов, а определенные здесь базовые принципы могут быть применены в других вариантах в рамках существа или объема вышеупомянутых вариантов. Таким образом, здесь не предполагается, что раскрытые варианты осуществления изобретения ограничиваются только теми аспектами и вариантами, которые здесь были показаны и описаны, а подразумевается, что они соответствует самой широкой сфере, согласующейся с раскрытыми здесь принципами, новыми признаками и способами. Кроме того, подразумевается, что используемый в подробном описании или формуле изобретения термин "включает в себя", является инклюзивным, аналогичным термину "содержащий", в то время как термин "содержащий" трактуется в качестве переходного слова при его использовании в формуле изобретения.
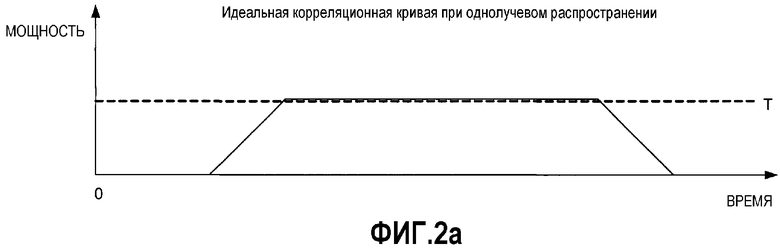




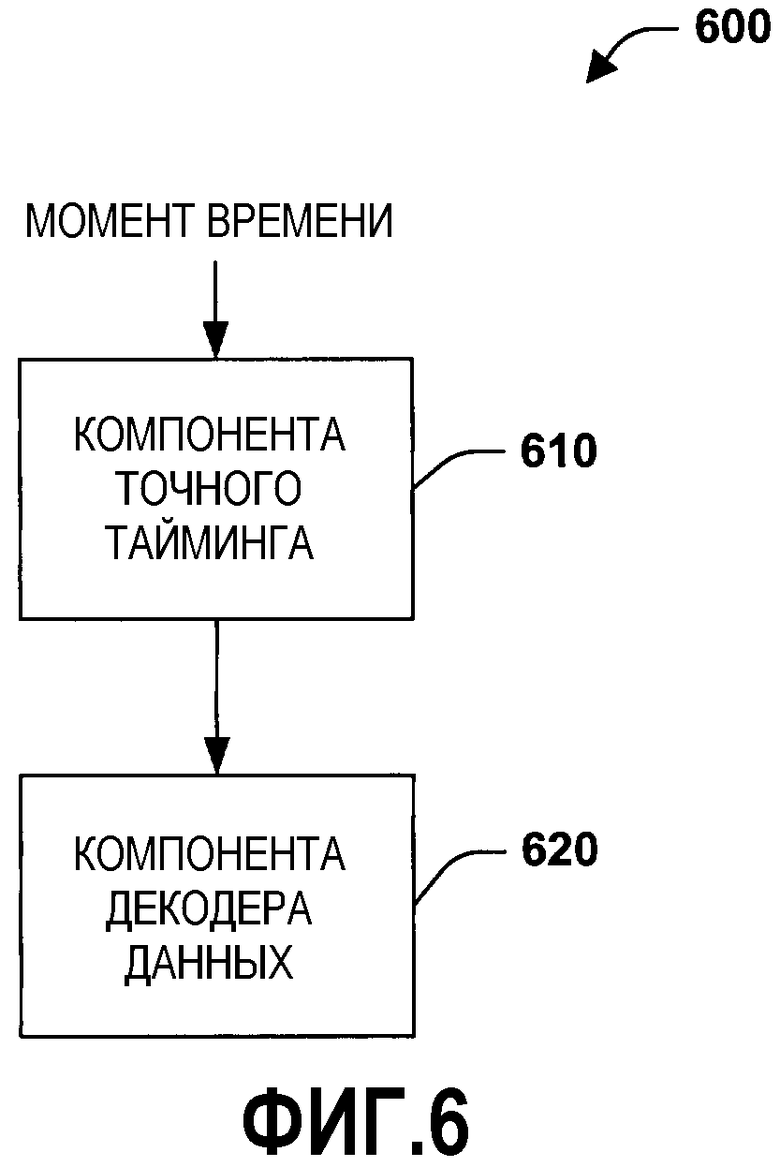

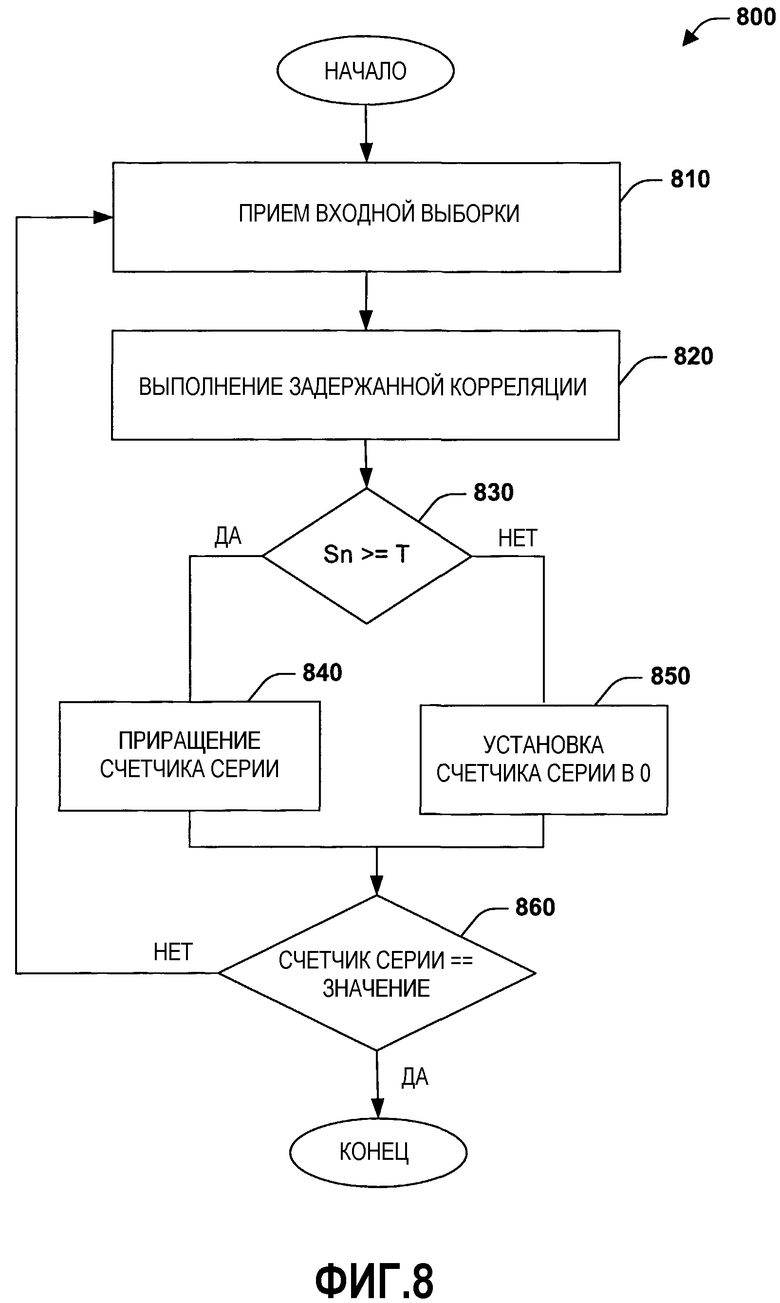


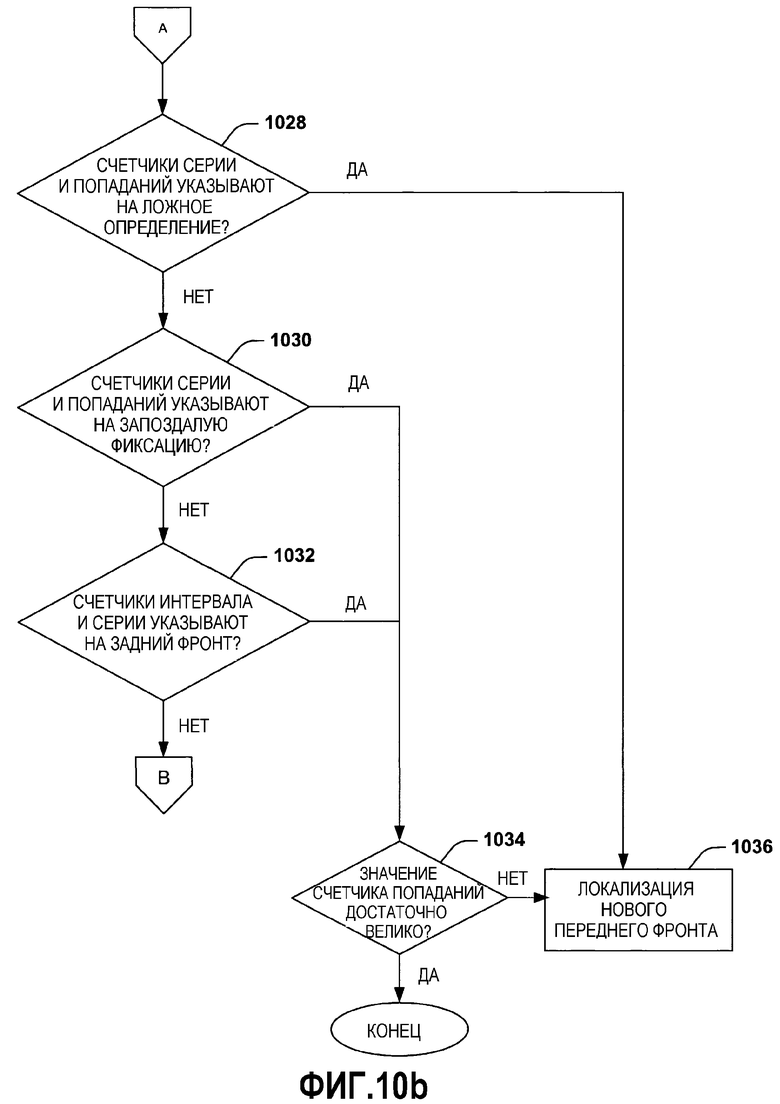
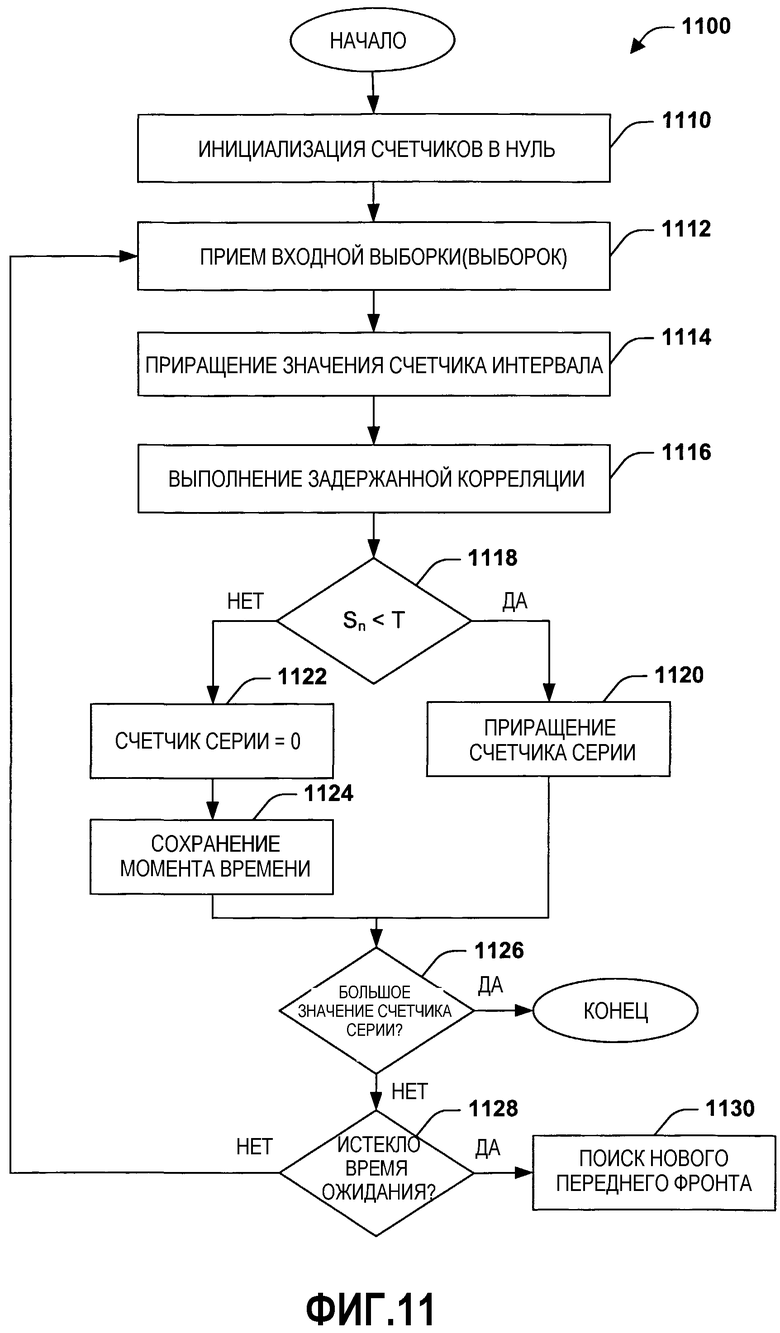

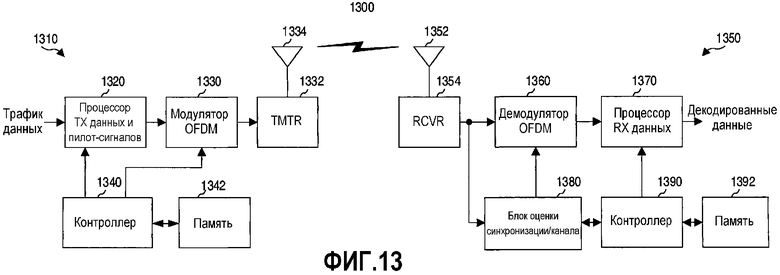



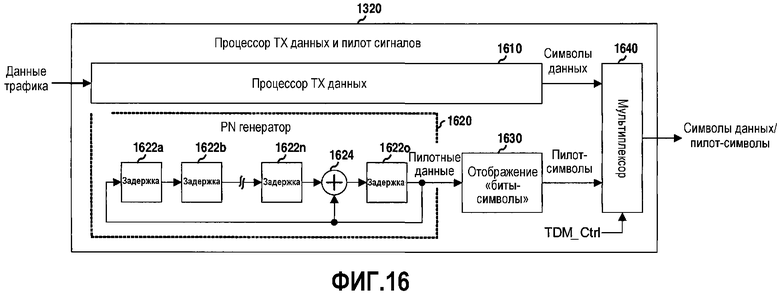




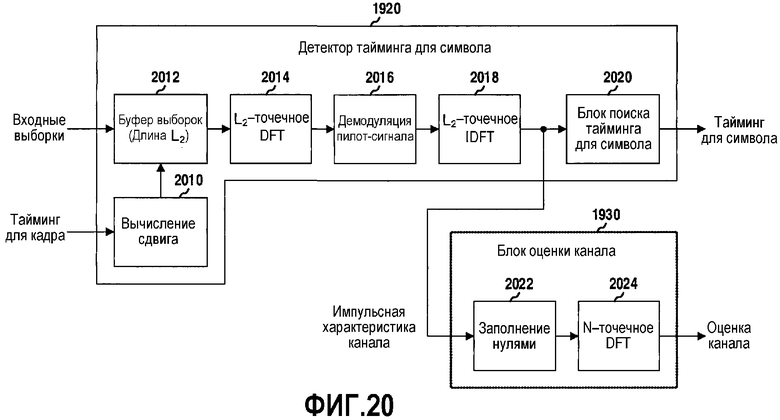




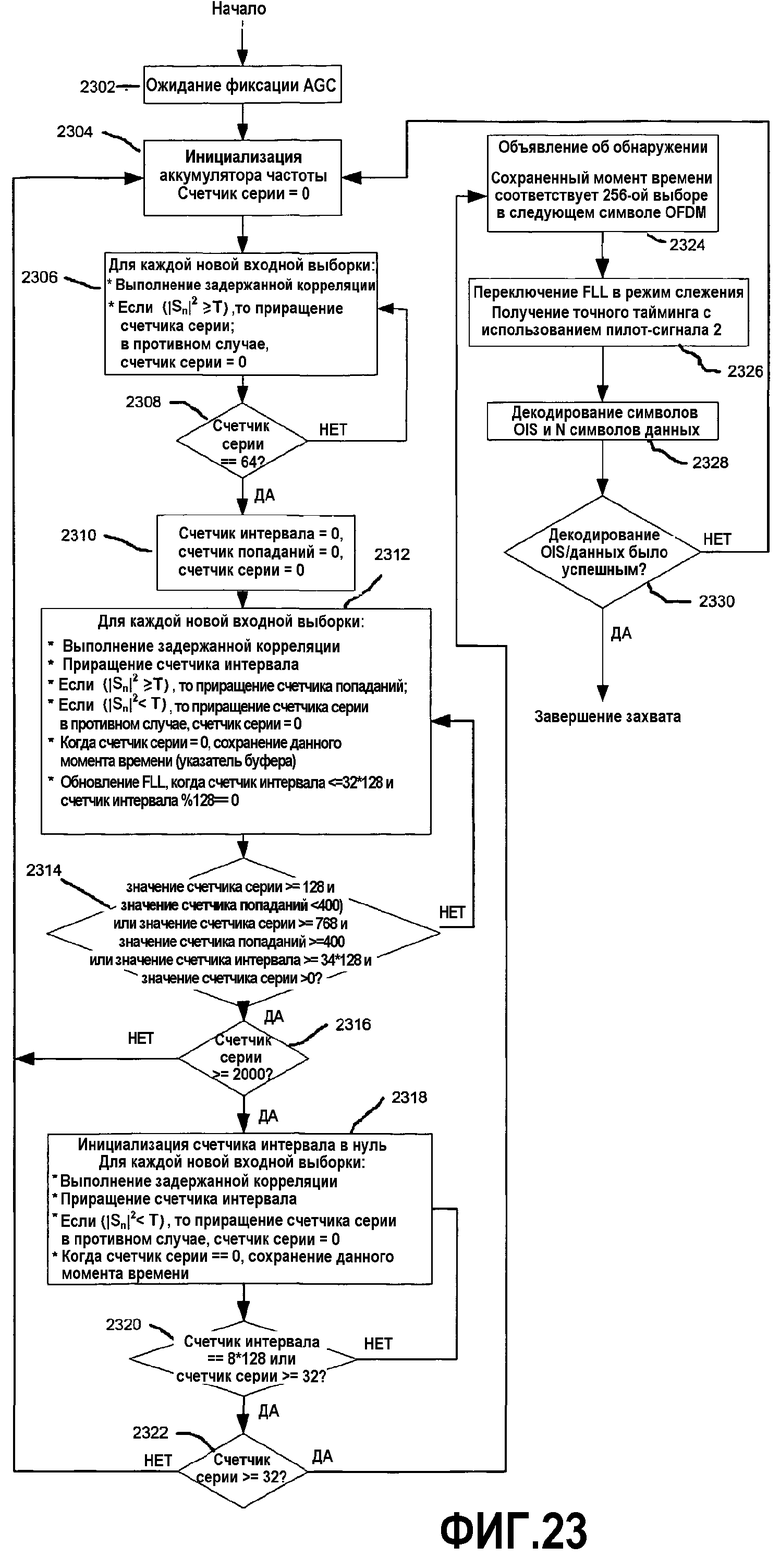
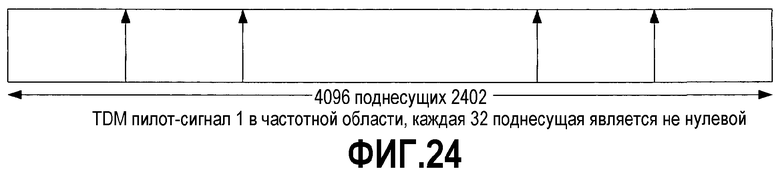

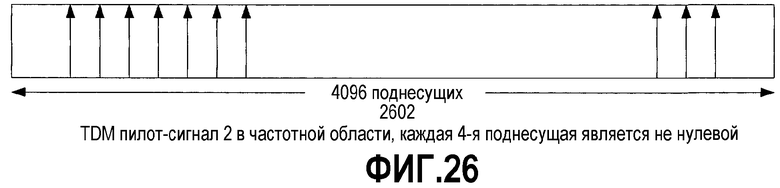
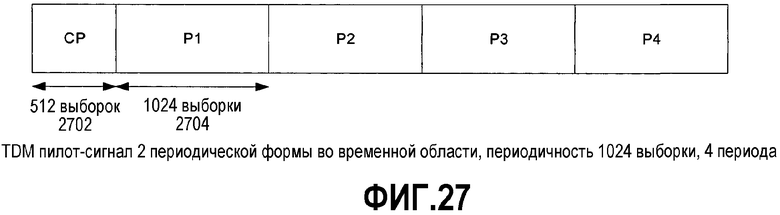
Изобретение относится к передаче данных и, в частности, касается обнаружения сигнала и синхронизации. Технический результат - повышение точности синхронизации. В предложенном способе первый пилот-сигнал используется в сочетании с тремя этапами обнаружения. На первом этапе предпринимается попытка заметить передний фронт корреляционной кривой, связанный с первым пилот-символом. На втором этапе при нахождении заднего фронта корреляционной кривой подтверждается, что на первом этапе был обнаружен передний фронт. Кроме того, во время второго этапа обновляется контур подстройки частоты для учета сдвига частоты. Третий этап предназначен для того, чтобы заметить задний фронт корреляционной кривой, если он не был замечен на втором этапе. После обнаружения приема первого пилот-сигнала впоследствии может быть использован второй пилот-сигнал для получения точного тайминга для символа. 2 н. и 3 з.п. ф-лы, 33 ил.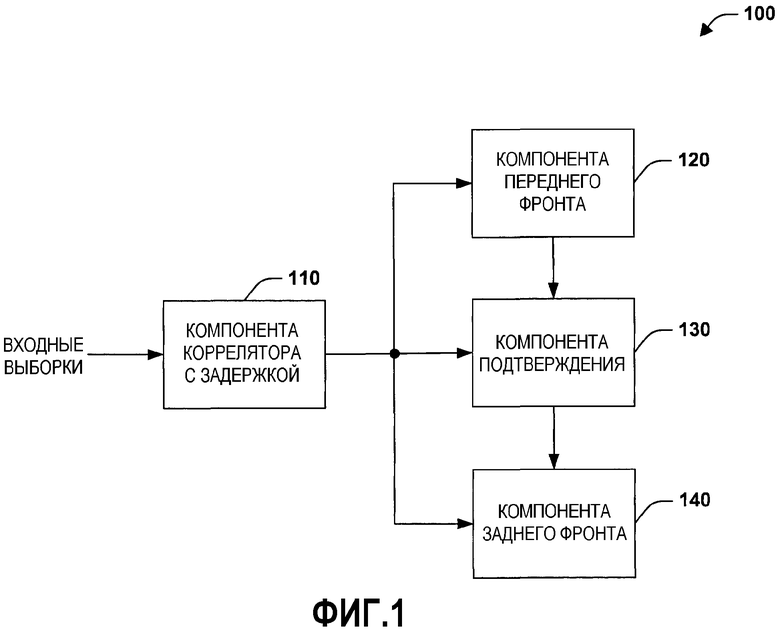
формируют выходные сигналы корреляции, формирующие корреляционную кривую, из упомянутых сигналов и их задержанных копий,
обнаруживают потенциальный передний фронт корреляционной кривой из выходных сигналов корреляции,
обновляют аккумулятор частоты системы автоматической подстройки частоты (FLL) в ответ на обнаружение потенциального переднего фронта корреляционной кривой,
обнаруживают задний фронт упомянутой кривой из выходных сигналов корреляции,
сохраняют информацию о тайминге, основанную на времени обнаружения заднего фронта, и
выполняют точный тайминг в ответ на обнаружение заднего фронта, причем точный тайминг выполняют на основании второго пилот-символа и сохраненной информации о тайминге.
средство для приема потока сигналов, по меньшей мере часть которых связана с первым пилот-символом;
средство для формирования выходных сигналов корреляции, формирующих корреляционную кривую, из упомянутых сигналов и их задержанных копий,
средство для обнаружения потенциального переднего фронта корреляционной кривой из выходных сигналов корреляции,
средство для обновления аккумулятора частоты системы автоматической подстройки частоты (FLL) в ответ на обнаружение потенциального переднего фронта корреляционной кривой, средство для обнаружения заднего фронта упомянутой кривой из выходных сигналов корреляции,
средство для сохранения информации о тайминге, основанной на времени обнаружения заднего фронта, и
средство для выполнения точного тайминга в ответ на обнаружение заднего фронта, причем точный тайминг выполняют на основании второго пилот-символа и сохраненной информации о тайминге.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| СИСТЕМА СВЯЗИ С КОЛЛЕКТИВНЫМ ДОСТУПОМ И КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ (СДМА), СИСТЕМА СВЯЗИ АБОНЕНТОВ С ПОМОЩЬЮ БАЗОВОЙ СТАНЦИИ С АБОНЕНТАМИ УДАЛЕННОЙ СИСТЕМЫ, СИСТЕМА МЕСТНОЙ СВЯЗИ И СПОСОБ СОЗДАНИЯ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ ПЕРЕДАВАЕМЫХ СИГНАЛОВ СДМА В СИСТЕМЕ СВЯЗИ | 1991 |
|
RU2111619C1 |
| US 6151295, А, 21.11.2000 | |||
| ЕР 0689913, А2, 27.12.1995 | |||
| US 6061327, А, 0905.2000 | |||
| US 5668764, А, 04.08.1997. | |||

