Область техники, к которой относится изобретение
Настоящее изобретение относится устройству отслеживания цели, использующему фотодетектор с квадрантами.
Уровень техники
Известно применение подсвечивания цели лазерным лучом для удаленного отслеживания цели, так чтобы этот луч отражался от цели и получающееся в результате этого отражения лазерное эхо проецировалось на фотодетектор с четырьмя квадрантами, называемый для простоты "четырехквадрантным фотодетектором" или "4Q-детектором".
Обычно детектор такого типа расположен на борту воздушного судна, такого как вертолет.
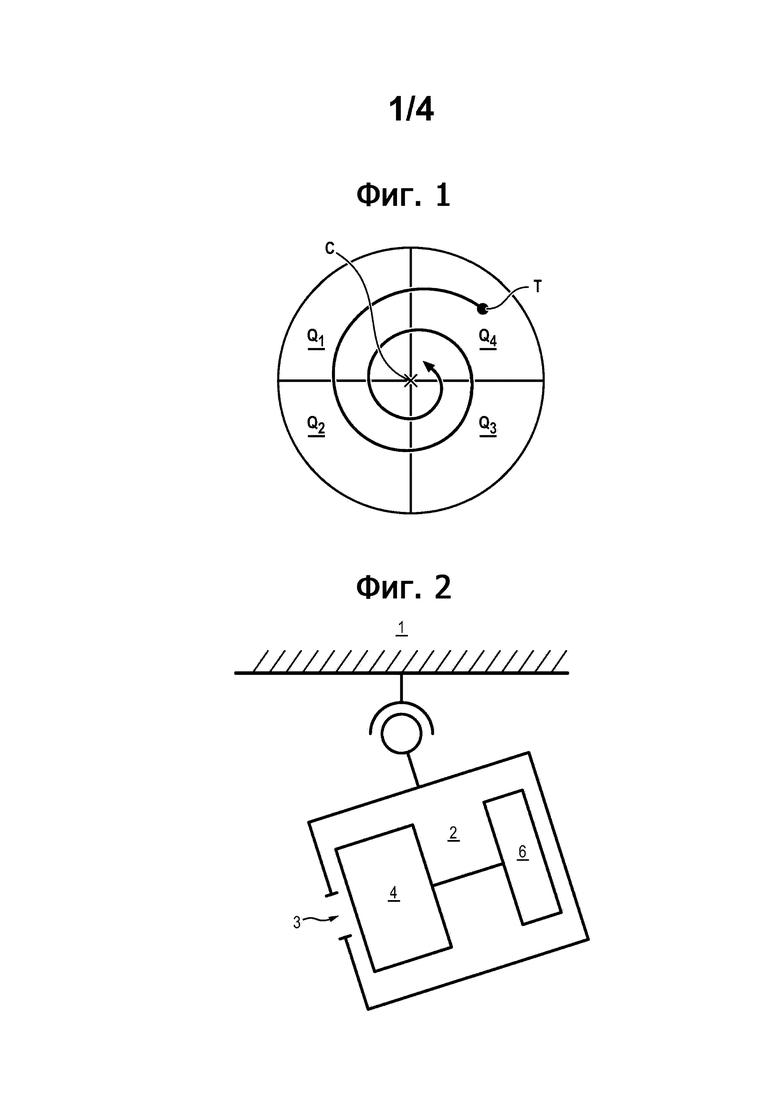
На фиг. 1 показано четыре квадранта Q1-Q4 обычного 4Q-детектора. Детектор оценивает текущее положение точки путем взвешивания значений энергии света, получаемого квадрантами Q1-Q4, которые расположены вокруг центра С. Из такого текущего положения можно вывести, как сориентирована цель относительно воздушного судна 1.
Тем не менее в некоторых приложениях, чтобы можно было достичь очень высокой точности измерения угловой погрешности (обычно менее 500 микрорадиан), оптико-электронный узел, состоящий из оптической системы и 4Q-детектора, должен быть спроектирован так, чтобы лазерное эхо проецировалось на квадранты в виде очень маленького пятна T, до такой степени, что пятно проходит только в одном из квадрантов 4Q-детектора (в примере, представленном на фиг. 1, в квадранте Q4). В такой ситуации взвешивание можно не осуществлять, так, как только в один из квадрантов попадает световая энергия. В таком случае известно, что пятно в целом расположено внутри единственного квадранта, в который попадает световая энергия, но точное положение пятна в этом квадранте точно оценить нельзя.
Известное решение для того, чтобы снова выполнить взвешивание, заключается в том, чтобы переместить пятно T так, чтобы оно одновременно захватывало несколько квадрантов 4Q-детектора. Такое смещение обычно получают путем изменения ориентации устройства, содержащего оптическую систему и 4Q-детектор, относительно цели.
Однако невозможно узнать заранее какую дать команду изменения ориентации, чтобы после выполнения команды было подсвечено по меньшей мере два квадранта. Следовательно, изменением ориентации устройства, содержащего оптическую систему и 4Q-детектор, управляет пользователь вручную.
Обычно такое ручное управление обеспечивает вращательное движение устройства, содержащего оптическую систему и 4Q-детектор, так чтобы пятно проходило по спиральной траектории к центру 4Q-детектора, как показано на фиг. 1. Однако этот способ является долгим и трудоемким. Кроме того, этот способ зависит от сноровки и опыта пользователя.
В документе US 2013/0070239 и в документе US 3 954 340 было предложено включать в устройство отслеживания цели, содержащее фотодетектор с квадрантами, оптическое устройство, выполненное с возможностью увеличивать пятно, полностью содержащееся только в одном из квадрантов 4Q-фотодетектора. Это оптическое устройство на самом деле представляет собой расфокусирующее устройство, которое увеличивает пятно путем расфокусировки луча света. Расфокусирующее устройство содержит расфокусирующую линзу, поступательно перемещаемую относительно 4Q-фотодетектора.
Увеличение проецируемого пятна дает эффект, заключающийся в приближении края пятна к границе между двумя квадрантами.
Если приближение, вызванное увеличением, таково, что пятно одновременно захватывает по меньшей мере два квадранта, то можно непосредственно выполнить взвешивание, и, следовательно, можно оценить положение пятна. Если по завершении этапа увеличения это условие полностью не выполнено, то необходимо осуществить смещение пятна. При этом смещение, которое должно быть выполнено для пятна так, чтобы оно одновременно захватывало по меньшей мере два квадранта, после этапа увеличения становится меньше. Поэтому команда, которую необходимо использовать для обеспечения этого смещения пятна, после увеличения намного проще. Например, если предполагается, что пятно можно смещать шаг за шагом по фотодетектору, то число шагов, необходимых для того, чтобы пятно пересекло по меньшей мере одну границу между двумя соседними квадрантами, сокращается.
Тем не менее увеличение пятна посредством расфокусирующего устройства обладает недостатками.
Расфокусирующее устройство очень чувствительно к вибрациям и изменениям температуры, что приводит к пагубным последствиям для возможной согласованности между применяемым устройством отслеживания и осветителем, излучающим лазерный луч. Кроме того, смещение расфокусирующей линзы является энергозатратным, и его не просто проводить. Наконец, расфокусирующее устройство обладает качеством передачи, которое можно улучшить.
Сущность изобретения
Цель изобретения заключается в том, чтобы иметь возможность быстрее находить положение пятна, проецируемого на детектор с квадрантами, если это пятно ограничено единственным квадрантом, посредством устройства, которое более устойчиво к вибрациям или к температурным изменениям, потребляет меньше электроэнергии, которым легче управлять, и которое обладает более высоким качеством передачи.
Поэтому, в соответствии с первым аспектом изобретения предложено устройство для отслеживания цели, причем устройство содержит оптическую систему и фотодетектор с квадрантами, причем оптическая система выполнена с возможностью проецировать луч света, поступающий от цели, в одно пятно на по меньшей мере одном из квадрантов, при этом фотодетектор выполнен с возможностью оценивать текущее положение пятна путем взвешивания значений энергии света, полученных квадрантами, и при этом оптическая система содержит оптическое устройство, выполненное с возможностью увеличивать пятно, если пятно целиком содержится только в одном из квадрантов. Оптическое устройство содержит многогранник, который должен пересекать луч света, и имеющий несколько оптических осей, причем многогранник может поворачиваться относительно фотодетектора вокруг оси вращения, отличной от каждой из оптических осей.
Используемый многогранник более устойчив к вибрациям и к изменениям температуры, чем расфокусирующая линза, и обладает более высоким качеством передачи.
Устройство отслеживания в соответствии с первым аспектом изобретения также может содержать следующие опциональные характеристики, как по-отдельности, так и в сочетании.
Пятно может быть увеличено до тех пор, пока пятно не будет одновременно охватывать по меньшей мере два квадранта. Таким образом, нет необходимости генерировать команду для смещения увеличенного пятна так, чтобы положение этого пятна можно было оценить путем взвешивания значений световой энергии, полученной квадрантами.
Более того, пятно может быть увеличено до тех пор, пока пятно не будет иметь предварительно заданный диаметр, превышающий или равный длине одной стороны квадранта. В этом случае увеличенное пятно может не охватить сразу несколько квадрантов. Команда на смещение пятна, приспособленная для выполнения этого условия, тем не менее существенно упрощается фактом увеличения пятна до такого диаметра.
Многогранник может представлять собой шестигранник, например, куб, с тремя оптическими осями, содержащими соответственно три диагонали шестигранника, причем ось вращения содержит другую диагональ шестигранника. Как вариант, многогранник может иметь две оптические оси и содержать грань в форме четырехугольника, например, квадрата, предназначенную для того, чтобы ее пересекал луч света, при этом две оптические оси содержат соответственно две диагонали этой грани, а ось вращения перпендикулярна этой грани.
Более того, устройство отслеживания может содержать мультистабильный привод, выполненный с возможностью размещать многогранник в различных угловых положениях, в которых проецируемое пятно имеет различные размеры.
В дополнение, могут быть обеспечены следующие характеристики:
- у фотодетектора имеется центр с заданным центральным положением;
- квадранты расположены вокруг центра;
- устройство отслеживания цели спроектировано так, чтобы его можно было устанавливать с возможностью отсоединения на воздушное судно;
- устройство отслеживания цели содержит контроллер, выполненный с возможностью генерировать на основе оцененного текущего положения и заданного центрального положения по меньшей мере одну команду для изменения ориентации устройства отслеживания относительно воздушного судна, причем команда приспособлена для того, чтобы пятно перемещалось к центру фотодетектора вдоль по существу прямолинейной траектории.
В соответствии со вторым аспектом изобретения предложено воздушное судно, содержащее устройство отслеживания цели в соответствии с первым аспектом изобретения.
В соответствии с третьим аспектом изобретения предложен способ отслеживания цели, реализуемый устройством, содержащим оптическую систему, выполненную с возможностью проецировать луч света, поступающий от цели, в одно пятно на по меньшей мере одном из квадрантов фотодетектора с квадрантами, выполненного с возможностью оценивать текущее положение пятна, причем если пятно целиком содержится только в одном из квадрантов, то способ содержит следующее: увеличивают пятно с помощью оптического устройства оптической системы.
Краткое описание чертежей
Другие характеристики, цели и преимущества изобретения будут очевидны из последующего описания, которое является только иллюстративным и неограничивающим, и которое следует читать в отношении прилагаемых чертежей, где:
- на фиг. 1 схематически показан фотодетектор с четырьмя квадрантами, на который проецируют луч света;
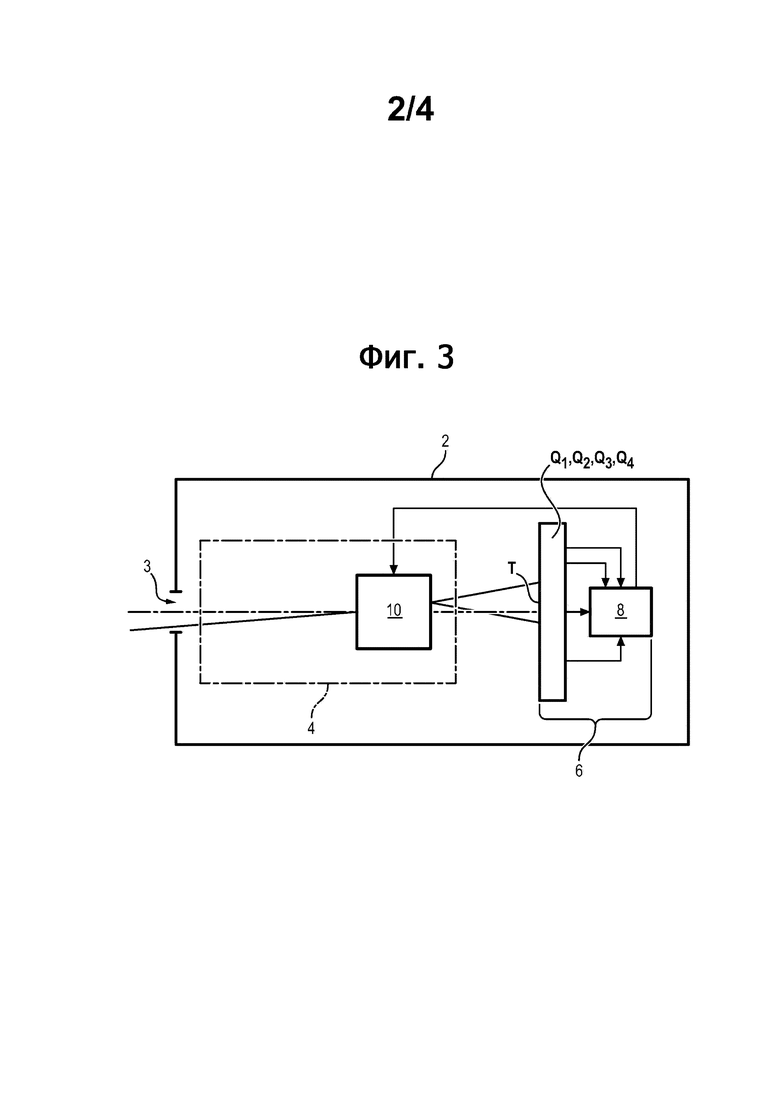
- на фиг. 2 и 3 схематично показано устройство отслеживания цели в соответствии с одним вариантом осуществления изобретения;
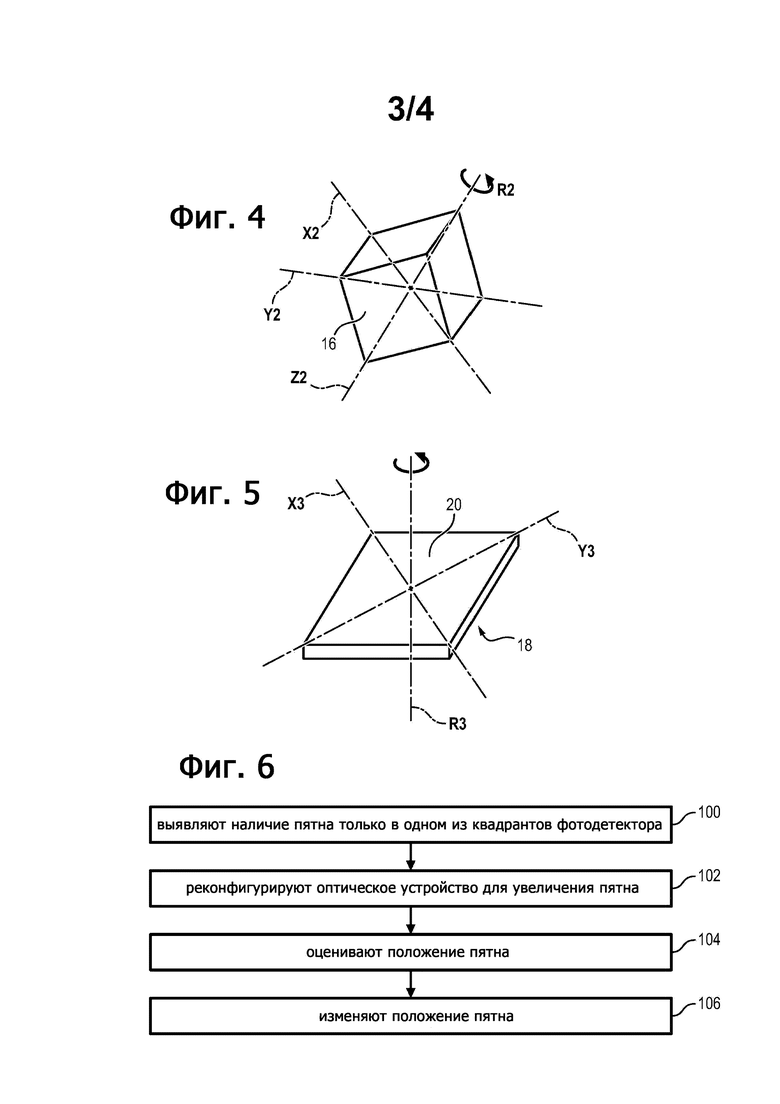
- на фиг. 4 приведен вид в перспективе оптического устройства в соответствии с первым вариантом осуществления изобретения;
- на фиг. 5 приведен вид в перспективе оптического устройства в соответствии со вторым вариантом осуществления изобретения;
- на фиг. 6 приведена блок-схема последовательности этапов способа отслеживания цели в соответствии с одним вариантом осуществления изобретения;
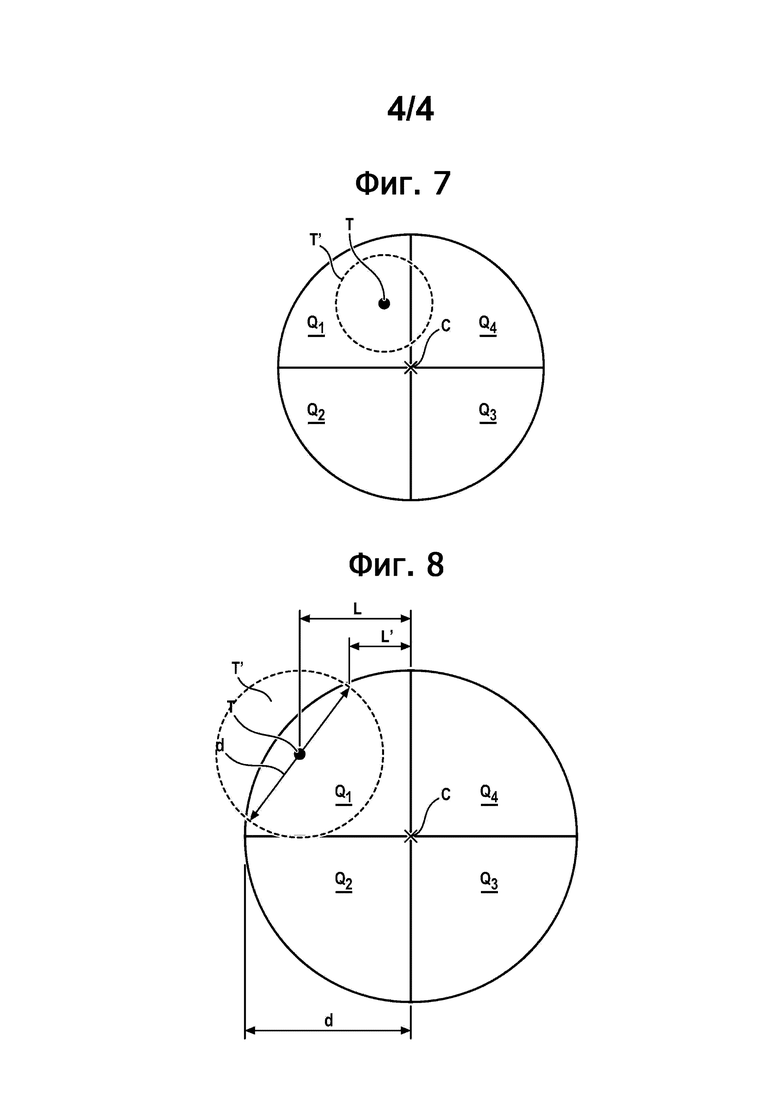
- на фиг. 7 и 8 схематично показан фотодетектор с четырьмя квадрантами и два пятна, спроецированных на этот фотодетектор во время реализации способа отслеживания в соответствии с фиг. 6.
На всех фигурах одинаковые элементы обозначены идентичными ссылочными позициями.
Подробное описание изобретения
Со ссылкой на фиг. 2, воздушное судно 1 содержит устройство 2 отслеживания цели.
Устройство 2 отслеживания установлено с возможностью поворота на воздушном судне 1, например, с помощью шарового соединения или поворотного соединения.
Устройство 2 отслеживания содержит внутреннее средство для поворота устройства 2 отслеживания относительно воздушного судна 1. Это внутреннее средство обычно содержит по меньшей мере один мотор и один модуль управления мотором или моторами. Каждый мотор допускает поворот устройства 2 вокруг оси, связанной с мотором. Следовательно, если внутреннее средство содержит несколько моторов, то устройство отслеживания может быть повернуто вокруг двух различных осей.
Более того, устройство 2 отслеживания цели содержит линзу 3, оптическую систему 4 и фотодетектор 6.
Луч света, поступающий от отслеживаемой цели, может попасть в устройство 2 отслеживания с помощью этой линзы 3.
Со ссылкой на фиг. 3, оптическая система 4 выполнена с возможностью проецировать луч света, принятый линзой 3, на фотодетектор 6 в виде одного пятна T.
Фотодетектор 6, известный сам по себе, содержит четыре квадранта Q1, Q2, Q3 и Q4, как те, что схематично показаны на фиг. 1. Четыре квадранта простираются вокруг центра С фотодетектора 6, положение которого, называемое центральным положением, предварительно задано. Каждый квадрант Qi приспособлен для генерации электрического сигнала, зависящего от количества световой энергии, которую принимает квадрант на единицу площади.
Каждый из четырех квадрантов может иметь форму четверти круга, как в примере, представленном на фиг. 1. Таким образом, узел, образованный четырьмя квадрантами, имеет форму круга, а центр С является центром этого круга. В этом случае по соглашению считают, что сторона квадранта равна радиусу этого круга.
Как вариант, четыре квадранта могут иметь квадратную форму. В этом случае узел, образованный четырьмя квадрантами, также является квадратом, а центр С расположен в центре этого квадрата.
Фотодетектор 6 также содержит (или соединен) блок 8 взвешивания, выполненный с возможностью оценивать текущее положение пятна T путем взвешивания электрических сигналов, полученных различными квадрантами Q1-Q4, в соответствии со способом взвешивания, известным из существующего уровня техники.
Помимо этого, оптическая система 4 содержит оптическое устройство 10, выполненное с возможностью модифицировать луч света, поступающий от линзы 3, так чтобы можно было модифицировать размер пятна, представляющего собой проекцию луча света на фотодетекторе 6.
Устройство 1 отслеживания также содержит контроллер для генерации и отправки на оптическое устройство 10 команд, причем эти команды приспособлены для того, чтобы модифицировать луч света. Контроллер, например, содержится в блоке 8 взвешивания или соединен с ним.
Оптическое устройство 10 содержит прозрачный многогранник, предназначенный для того, чтобы через него проходил луч света, принятый линзой 3. Многогранник имеет несколько оптических осей и может поворачиваться относительно фотодетектора 6 вокруг оси, отличной от каждой из оптических осей.
Для изменения луча такой многогранник обладает несколькими преимуществами по сравнению с расфокусирующим устройством: он является более устойчивым к вибрациям или к изменениям температуры (чувствительность согласованности между устройством 1 отслеживания и осветителем), он потребляет меньше электроэнергии и им проще управлять. Кроме того, многогранник обладает более хорошим качеством передачи, чем расфокусирующая линза.
Устройство 1 отслеживания также содержит привод для поворота многогранника относительно фотодетектора 6.
Привод выполнен с возможностью располагать многогранник в различных угловых положениях, в которых пятно, проецируемое на фотодетектор 6, имеет различные размеры.
Привод предпочтительно является мультистабильным, что позволяет достичь дополнительной экономии энергии.
Многогранник может быть доступен в нескольких вариантах.
Со ссылкой на фиг. 4, оптическое устройство 10 в соответствии с первым вариантом содержит многогранник 16, соответствующий вышеприведенному, имеющий три оптические оси X2, Y2, Z2. В этом случае многогранник является шестигранником: тогда он может представлять собой куб, как представлено на фиг. 4, или параллелепипед.
Шестигранник имеет восемь вершин, из которых: две первые противоположные вершины проходят через первую диагональ шестигранника, две вторые противоположные вершины проходят через вторую диагональ шестигранника, две третьи противоположные вершины проходят через третью диагональ шестигранника, и две четвертые противоположные вершины проходят через четвертую диагональ шестигранника.
Три оптические оси X2, Y2, Z2 соответственно содержат первую, вторую и третью диагонали шестигранника.
Кроме того, шестигранник может поворачиваться относительно фотодетектора 6 вокруг оси R вращения, содержащей четвертую диагональ шестигранника.
Преимущество, обеспечиваемое шестигранником с тремя оптическими осями, позволяет получить три различных размера пятен; это обеспечивает гибкость при реализации способа, который будет описан ниже.
Со ссылкой на фиг. 5, второй вариант осуществления оптического устройства 10 содержит многогранник 18, имеющий только две оптические оси X3, Y3.
В частности, у многогранника имеется грань 20, предназначенная для того, чтобы через нее проходит луч света, принимаемый линзой 3. Грань 20 представляет собой четырехугольник, например, квадрат, который имеет четыре вершины, из которых: две первые противоположные вершины проходят через первую диагональ грани, две вторые противоположные вершины проходят через вторую диагональ грани.
Две оптические оси X3, Y3 многогранника 18 соответственно содержат первую и вторую диагонали грани 20.
Кроме того, многогранник 18 может поворачиваться относительно фотодетектора 6 вокруг оси R3 вращения, перпендикулярной плоскости грани 20. Ось R3 вращения проходит, например, через точку пересечения диагоналей грани.
В этом варианте многогранник обычно имеет форму тонкой пластины, если измерять перпендикулярно грани.
Многогранник 18 имеет более простую конструкцию и является более компактным по сравнению с многогранником 16.
Со ссылкой на фиг. 6, способ, реализуемый посредством устройства 2 отслеживания, содержит следующие этапы для отслеживания цели.
Предполагается, что цель T подсвечивают осветителем, расположенным, например, на борту воздушного судна 1. Этот осветитель представляет собой, например, лазер.
Луч света, генерируемый осветителем, отражается от цели T и попадает в устройство 1 отслеживания через его линзу 3.
Луч света, принятый линзой 3, проецируют посредством оптической системы 4 на квадрант фотодетектора 6 в виде одного пятна T.
На этом этапе оптическое устройство 10 работает в первом режиме работы, в котором пятно T, сформированное проецированием луча света на фотодетектор 6, меньше, чем сторона квадранта.
Конечно, если цель перемещается относительно устройства 2 отслеживания, то пятно перемещается на фотодетекторе 6 (действительно, воздушное судно 1 является подвижным, и, конечно, цель также может перемещаться).
Во время этапа 100 фотодетектор 6 детектирует, что пятно T содержится только в одном из его квадрантов, например, в квадранте Q1, как представлено на фиг. 7. Такое детектирование обычно выполняют посредством блока взвешивания путем сравнения интенсивности электрических сигналов, генерируемых различными квадрантами фотодетектора 6 при заданном пороговом значении. Такое детектирование происходит, в частности, за счет того, что три электрических сигнала, генерируемых тремя квадрантами (в данном случае квадрантами Q2, Q3, Q4), имеют интенсивность ниже заданного порога, что означает, что эти три квадранта не получили никакой существенной световой энергии, в то время как электрический сигнал, генерируемый квадрантом Q1, имеет интенсивность выше порога, что означает, что квадрант Q1, со своей стороны, получил световую энергию в значительных количествах.
Когда происходит такое детектирование 100, фотодетектор 6 не способен точно определить, где расположено пятно, и может, в частности, выйти за пределы поля зрения линзы 3 устройства 2 отслеживания.
Кроме того, когда происходит такое детектирование 100, оптическое устройство 10 реконфигурируют (этап 102) так, чтобы увеличить пятно, расположенное на этом этапе только в квадранте Q1, и это происходит до тех пор, пока пятно не охватит не только квадрант Q1, но и по меньшей мере один из трех квадрантов Q2, Q3, Q4.
В примере, представленном на фиг. 7, пятно T после увеличения становится опорным пятном T', охватывающим по меньшей мере частично квадранты Q1 и Q4 одновременно.
Реконфигурация 102 оптического устройства 10 содержит, например, следующее: посредством устройства взвешивания генерируют команду на реконфигурацию оптического устройства 10 и передают эту команду на оптическое устройство 10, чтобы вызвать увеличение пятна T до пятна T'.
Увеличение, вызванное реконфигурацией 102, прекращают, например, как только блок взвешивания обнаруживает, что по меньшей мере два из четырех электрических сигналов, которые он принимает, имеют интенсивность, превышающую заданное пороговое значение (либо два электрических сигнала из четырех сигналов, либо три электрических сигнала из четырех генерируемых сигналов, либо четыре сигнала). Это действительно означает, что увеличенное пятно T' одновременно охватывает несколько квадрантов.
Формально считают, что после выполнения этого условия оптическое устройство 10 находится во втором режиме работы.
Кроме того, как только это условие выполнено, устройство взвешивания может взвешивать электрические сигналы, которые оно получает, чтобы оценить текущее положение центра пятна на детекторе.
Затем контроллер на основе оцененного текущего положения и заданного центрального положения генерирует по меньшей мере одну команду для изменения ориентации устройства 2 отслеживания для того, чтобы пятно перемещалось к центру фотодетектора 6 вдоль по существу прямолинейной траектории.
Сгенерированную команду передают на мотор(ы), который вызывает поворот устройства 2 отслеживания относительно воздушного судна 1. Во время этого поворота пятно движется к центру фотодетектора 6 вдоль по существу прямолинейной траектории.
Можно предусмотреть, чтобы этап увеличения выполняли до тех пор, пока пятно не будет иметь заданного диаметра. Действительно, слишком большое увеличение пятна может привести к потере световой энергии (большая часть луча света будет спроецирована за пределы фотодетектора 6). Этот предварительно заданный диаметр предпочтительно больше, или равен длине одной стороны квадранта.
Конечно, увеличенное пятно после достижения предварительно заданного диаметра в действительности может охватывать несколько квадрантов фотодетектора 6, как предполагалось ранее, тем самым, позволяя снова выполнить взвешивание значения световой энергии, полученной квадрантами.
Тем не менее, это условие также может быть не выполнено после достижения предварительно заданного диаметра. Со ссылкой на фиг. 8, представлен пример пятна T, расположенного в квадранте Q1. Пятно T расположено на расстоянии L от соседнего квадранта Q4. В конце этапа увеличения пятно T стало увеличенным пятном T' (показано пунктирной линией), имеющим диаметр, равный длине d одной стороны квадранта. Хотя увеличенное пятно T' остается на расстоянии от квадрантов Q2, Q3 и Q4, факт заключается в том, что это расстояние было уменьшено во время увеличения. Например, увеличенное пятно расположено на расстоянии L' от квадранта Q4, меньшем, чем расстояние L.
Если обнаружено, что только один квадрант принимает световую энергию от луча даже после увеличения (Q1 в примере на фиг. 8), то выполняют смещение пятна в сторону противоположного квадранта. Так как расстояние L' меньше, чем расстояние L, используемая команда остается более простой, чем команда, которую необходимо было бы применить без этапа увеличения.
В конечном счете, два события могут инициировать завершение этапа увеличения: охватывание пятном нескольких квадрантов или достижение диаметром пятна заданного значения (большего или равного длине одной стороны квадранта).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЗАПИСИ СЕРВОДАННЫХ ДЛЯ ИСПОЛЬЗОВАНИЯ В НАКОПИТЕЛЯХ НА ДИСКАХ | 1995 |
|
RU2141691C1 |
| МНОГОКАНАЛЬНЫЙ КОНФОКАЛЬНЫЙ МИКРОСКОП (ВАРИАНТЫ) | 2014 |
|
RU2574863C1 |
| УСТРОЙСТВО И СПОСОБ ЛАЗЕРНОГО СПЕКАНИЯ | 1994 |
|
RU2132761C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАЛЬНОСТИ И СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТОВ | 1999 |
|
RU2169373C2 |
| ОПТИЧЕСКАЯ ГОЛОВКА СЧИТЫВАНИЯ | 1996 |
|
RU2173483C2 |
| Устройство для записи информации | 1988 |
|
SU1665396A1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ СВЕТОВЫХ ЭФФЕКТОВ | 1992 |
|
RU2042079C1 |
| ОПТИЧЕСКИЙ РАСХОДОМЕР ДЛЯ ИЗМЕРЕНИЯ РАСХОДА ГАЗОВ И ЖИДКОСТЕЙ В ТРУБОПРОВОДАХ | 2004 |
|
RU2377573C2 |
| Оптическая сканирующая система лазерного принтера | 1990 |
|
SU1767467A1 |
| ДАТЧИК ВОЛНОВОГО ФРОНТА | 2006 |
|
RU2431813C2 |
Настоящее изобретение относится к устройству отслеживания цели, использующему фотодетектор с квадрантами. Техническим результатом изобретения является повышение скорости нахождения положения пятна, проецируемого на детектор с квадрантами, если это пятно ограничено единственным квадрантом, посредством устройства, которое более устойчиво к вибрациям или к температурным изменениям, потребляет меньше электроэнергии, которым легче управлять, и которое обладает более высоким качеством передачи. Устройство (2) для отслеживания цели содержит оптическую систему (4) и фотодетектор (6) с квадрантами (Q1-Q4), причем оптическая система (4) выполнена с возможностью проецировать луч света, исходящий от цели, в одно пятно по меньшей мере на одном из квадрантов (Q1-Q4), а фотодетектор (6) выполнен с возможностью оценивать текущее положение пятна путем взвешивания значений световой энергии, принятой квадрантами (Q1-Q4). Оптическая система (4) содержит оптическое устройство (10), выполненное с возможностью увеличивать пятно, если пятно полностью содержится только в одном из квадрантов (Q1-Q4). Изобретение также относится к способу отслеживания, который может быть реализован посредством устройства отслеживания. 3 н. и 12 з.п. ф-лы, 8 ил.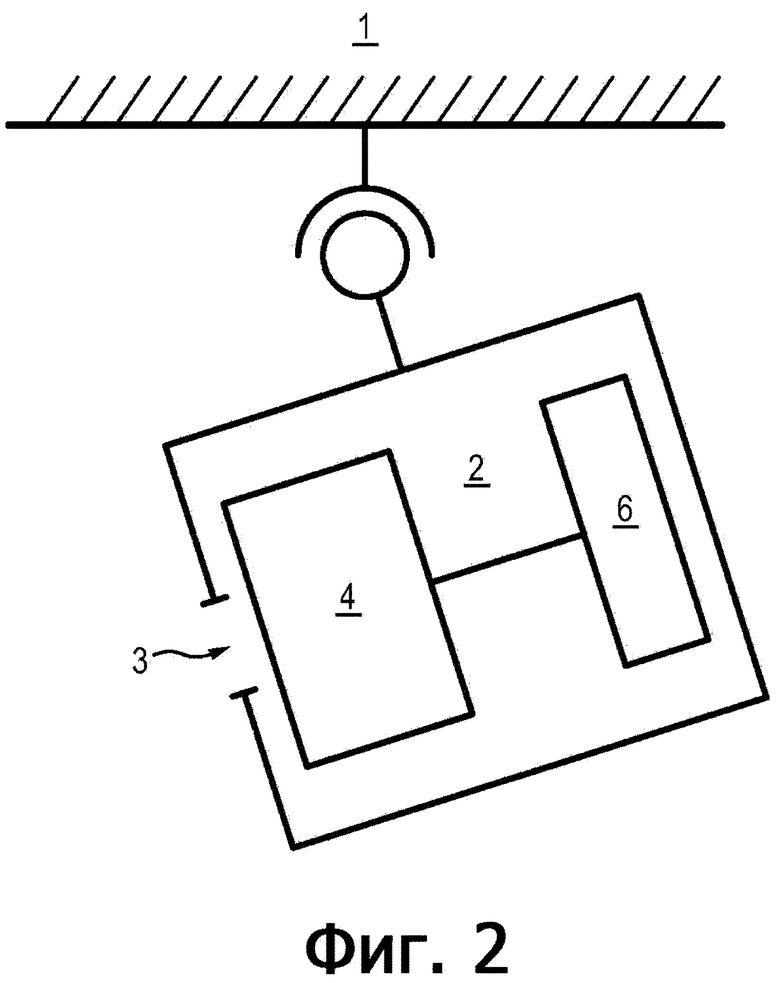
1. Устройство (2) для отслеживания цели, содержащее оптическую систему (4) и фотодетектор с квадрантами (Q1-Q4), при этом
- оптическая система (4) выполнена с возможностью проецировать луч света, исходящий от цели, в одно пятно по меньшей мере на одном из квадрантов (Q1-Q4);
- фотодетектор (6) выполнен с возможностью оценивать текущее положение пятна путем взвешивания значений световой энергии, принятой квадрантами (Q1-Q4);
- оптическая система (4) содержит оптическое устройство (10), выполненное с возможностью увеличивать пятно, если пятно полностью содержится только в одном из квадрантов (Q1-Q4);
отличающееся тем, что оптическое устройство (10) содержит многогранник (16, 18), расположенный таким образом, чтобы его пересекал указанный луч света, и имеющий оптические оси (X2, Y2, Z2, X3, Y3), причем многогранник (16, 18) способен поворачиваться относительно фотодетектора (6) вокруг оси (R2, R3) вращения, отличной от каждой из указанных оптических осей.
2. Устройство (2) отслеживания цели по п. 1, в котором пятно увеличивается до тех пор, пока пятно не охватывает одновременно по меньшей мере два квадранта (Q1-Q4).
3. Устройство (2) отслеживания цели по п. 1 или 2, в котором пятно увеличивается до тех пор, пока не достигнет предварительно заданного диаметра, который больше или равен длине одной стороны квадранта (Q1-Q4).
4. Устройство (2) отслеживания цели по любому из пп. 1-3, в котором многогранник представляет собой шестигранник (16), имеющий три оптические оси (X2, Y2, Z2), содержащие соответственно три диагонали шестигранника (16), при этом ось (R2) вращения содержит другую диагональ шестигранника (16).
5. Устройство (2) отслеживания цели по п. 4, в котором многогранник представляет собой куб.
6. Устройство (2) отслеживания цели по любому из пп. 1-3, в котором многогранник (18) имеет две оптические оси (X3, Y3) и содержит четырехугольную грань (20), расположенную так, чтобы ее пересекал указанный луч света, при этом две оптические оси (X3, Y3) содержат соответственно две диагонали четырехугольной грани (20), а ось (R3) вращения перпендикулярна четырехугольной грани (20).
7. Устройство (2) отслеживания цели по п. 6, в котором четырехугольная грань (20) является квадратом.
8. Устройство (2) отслеживания цели по любому из пп. 1-7, в котором:
- фотодетектор (6) имеет центр, причем центр фотодетектора имеет заданное центральное положение;
- квадранты (Q1-Q4) расположены вокруг указанного центра;
- устройство (2) отслеживания цели выполнено с возможностью подвижного закрепления на воздушном судне (1);
- устройство (2) отслеживания цели содержит контроллер, выполненный с возможностью генерировать на основе оцененного текущего положения и указанного заданного центрального положения по меньшей мере одну команду для изменения ориентации устройства (2) отслеживания относительно воздушного судна (1), причем указанная команда является такой, чтобы пятно перемещалось к центру фотодетектора (6) вдоль по существу прямолинейной траектории.
9. Устройство (2) отслеживания цели по любому из пп. 1-8, также содержащее мультистабильный привод, выполненный с возможностью размещать указанный многогранник в различных угловых положениях, при которых проецируемое пятно имеет различные размеры.
10. Воздушное судно (1), содержащее устройство (2) отслеживания цели по любому из пп. 1-9.
11. Способ отслеживания цели, осуществляемый с помощью устройства, содержащего оптическую систему (4), выполненную с возможностью проецировать луч света, исходящий от цели, в одно пятно по меньшей мере на одном квадранте фотодетектора (6) с квадрантами (Q1-Q4), выполненного с возможностью оценивать (104) текущее положение пятна путем взвешивания значений световой энергии, принимаемой квадрантами (Q1-Q4), отличающийся тем, что если пятно целиком содержится только в одном из квадрантов (Q1-Q4), то увеличивают пятно с помощью оптического устройства (10) оптической системы (4), причем оптическое устройство (10) содержит многогранник (16, 18), расположенный так, чтобы его пересекал указанный луч света, и имеющий оптические оси (X2, Y2, Z2, X3, Y3), при этом указанный многогранник (16, 18) установлен с возможностью поворачиваться относительно фотодетектора (6), вокруг оси (R2, R3) вращения, отличной от каждой из указанных оптических осей.
12. Способ по п. 11, в котором многогранник представляет собой шестигранник (16), имеющий три оптические оси (X2, Y2, Z2), содержащие соответственно три диагонали шестигранника (16), при этом ось (R2) вращения содержит другую диагональ шестигранника (16).
13. Способ по п. 12, в котором многогранник представляет собой куб.
14. Способ по п. 11, в котором многогранник (18) имеет две оптические оси (X3, Y3) и содержит четырехугольную грань (20), расположенную так, чтобы ее пересекал указанный луч света, при этом две оптические оси (X3, Y3) содержат соответственно две диагонали четырехугольной грани (20), а ось (R3) вращения перпендикулярна четырехугольной грани (20).
15. Способ по п. 14, в котором четырехугольная грань (20) является квадратом.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАЛЬНОСТИ И СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТОВ | 1999 |
|
RU2169373C2 |
| Транспортирующее устройство для стальных листов в линиях сортировки | 1960 |
|
SU133325A1 |
| Способ отбеливания цветной многослойной пленки в кислом растворе хинона | 1951 |
|
SU100636A1 |
| ЛАЗЕРНОЕ ПРИЕМНОЕ УСТРОЙСТВО | 2015 |
|
RU2584185C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ЦЕЛЕУКАЗАНИЯ | 2014 |
|
RU2563312C1 |
| US 8451432 B2, 28.05.2013 | |||
| US 3954340 A, 04.05.1976 | |||
| US 9194751 B1, 24.11.2015 | |||
| JPS 5926082 A, 10.02.1984 | |||
| US 2017242102 A1, 24.08.2017. | |||

