Изобретение относится к области навигации, в частности и к оптико-электронным устройствам контроля скорости движения объектов, и может быть использовано для предотвращения столкновения транспортных средств.
Известно устройство для определения скорости движения объектов, содержащее два разнесенных оптико-электронных приемника и подключенные к выходам оптико-электронных приемников в каждом канале, последовательно соединенные схему сравнения амплитуд, триггер, схему совпадений и индикатор, подключенный к выходу схем сравнения амплитуд. Формирователь импульсов, выход которого подключен к другому входу схемы совпадений каждого канала, выход схемы сравнения амплитуд каждого канала дополнительно подключен к второму входу триггера другого канала (1).
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного устройства, относится то, что в известном устройстве невозможно определить дальность до объекта.
Известно также устройство для измерения дальности до точечной цели (2), которое основано на принципе расфокусировки изображения.
Известное устройство (2) содержит объектив, непрозрачный диск, расположенный за объективом и имеющий узкую радиальную щель и вращающийся с постоянной скоростью, два фотоприемника, расположенные за диском, выходы которых подключены ко входам дискриминатора, а также измеритель, подключенный к выходу дискриминатора. Если цель находится на таком расстоянии, что фокусируется в плоскость размещения вращающегося диска, то два фотоприемника выдадут сигналы, совпадающие во времени в момент прохождения щели через изображения цели.
Если же расстояние до цели изменится так, что плоскость изображения переместится в сторону от плоскости расположения вращающегося диска, то, во-первых, форма импульсов изменится (импульс несколько расплывается), а во-вторых, они появятся на выходах фотодетекторов не одновременно, а с некоторым сдвигом во времени. Причем величина этого сдвига зависит от степени ухода плоскости изображения, т.е. от дальности до цели. Уход плоскости изображения в противоположную сторону поменяет порядок появления импульсов на выходах фотодетектора.
Последующие элементы схемы измеряют временный интервал между импульсами с выходом фотодетекторов и определяют дальность цели. Для этого используется фазовый дискриминатор и измеритель.
К причинам, препятствующим достижению указанного ниже технического результата, относится то, что известное устройство не позволяет определить скорость движения объекта, а также сложность конструкции, связанная с наличием электромеханических вращающихся узлов.
Известен также фотоэлектрический датчик скорости вращения, который по конструктивным признакам может быть указан в качестве прототипа предложенного технического решения (3).
Известное устройство (3) содержит последовательно расположенные оптически согласованные осветитель, объектив, линзу, позиционно-чувствительный четырехплощадочный фотоприемник, квадранты которого соединены с входами четырех предварительных усилителей. Выходы первого и второго предварительных усилителей соединены с входами суммирующего усилителя. Кроме того, известное устройство содержит разностный усилитель, два компаратора и элемент И. При этом выходы третьего и четвертого предварительных усилителей соединены с входами разностного усилителя, а выходы суммирующего и разностного усилителей через компараторы соединены соответственно с первым и вторым входами элемента И.
К причинам, препятствующим достижению технического результата, указанного ниже, относятся ограниченные функциональные возможности устройства, связанные с тем, что оно не позволяет определить дальность и радиальную скорость движения объекта.
Задача заявляемого изобретения - создание устройства с расширенными функциональными возможностями, заключающимися в определении двух фиксированных дистанций нахождения объекта Z1 и Z2 и радиальной скорости его приближения.
Технический результат - расширение функциональных возможностей устройства.
Сущность предложенного технического решения заключается в том, что в устройство для контроля скорости движения объектов, содержащее источники модулированного света (лазер) и оптически сопряженные с ним зеркало, объектив и позиционно-чувствительный четырехплощадочный фотоприемник, выходы квадрантов которого подключены ко входам блока обработки сигналов, введены непрозрачная маска оптический элемент формы квадранта. При этом непрозрачная маска установлена так, чтобы перекрывала часть входного зрачка объектива, а границы раздела квадрантов четырехплощадочного фотоприемника проходят параллельно или перпендикулярно краям непрозрачной маски и оптического элемента.
Кроме того, блок обработки сигналов содержит первый и второй усилители, выходы которых подключены у первому и второму выходам блока выделения сигналов дальности, первый и второй выходы последнего являются первым и вторым информационными выходами устройства и одновременно подключены к соответствующим выходам триггера, первый вход которого запараллелен с выходом формирователя импульсов, а выходы последних подключены к входам схемы сравнения дальностей.
Блок выделения сигналов дальности при этом содержит первый и второй селективные усилители, выходы которых подключены к схеме деления, выход которого подключен к запараллельным первым входам первого и второго компараторов, вторые входы которых подключены соответственно к выходам первого и второго блоков задания констант. При этом выходы компараторов являются выходами блока.
Указанные конструктивные признаки являются существенными и позволяют достичь поставленную задачу и технический результат - расширить функциональные возможности устройства, заключающееся в определении дальности и радиальной скорости движения объекта.
На фиг. 1а представлена блок схема устройства, где 1 - источник подсвета (лазер), 2 - зеркало, 3 - объектив, 4 - непрозрачная шторка (маска), 5 - оптический элемент - прямоугольный сектор сферической линзы, 6 - позиционно чувствительный четырехплощадочный фотоприемник, 7 - блок обработки сигналов (БОС), V1V2 ± ΔV - информационные выходы устройства.
На фиг. 1б изображен вид спереди входного зрачка объектива 3, часть которого перекрыта непрозрачной маской 4, а сзади установлен дополнительный оптический элемент 5.
На фиг. 1в изображены квадранты I, II, III, IV фоточувствительной поверхности позиционно-чувствительного четырехплощадочного фотоприемника 6.
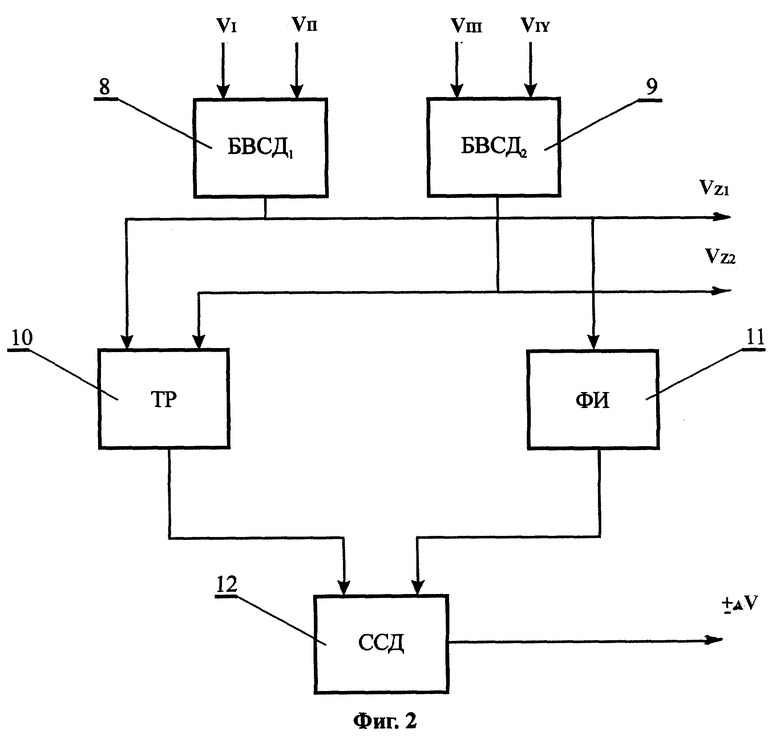
На фиг. 2 приведена структурная схема блока обработки 7, где 8 и 9 - первый и второй блоки выделения сигналов дальности (БВСД), выходы которых являются первым Z1 и вторым Z2 информационными выходами устройства и они же подключены к входам триггера 10, а выход первого БВСД1 8 - дополнительно к входу формирователя импульсов 11. Выходы триггера 10 и формирователя импульсов 11 подключены к входам схемы сравнения длительностей 12, выход которой является третьим информационным выходом устройства ±ΔV.
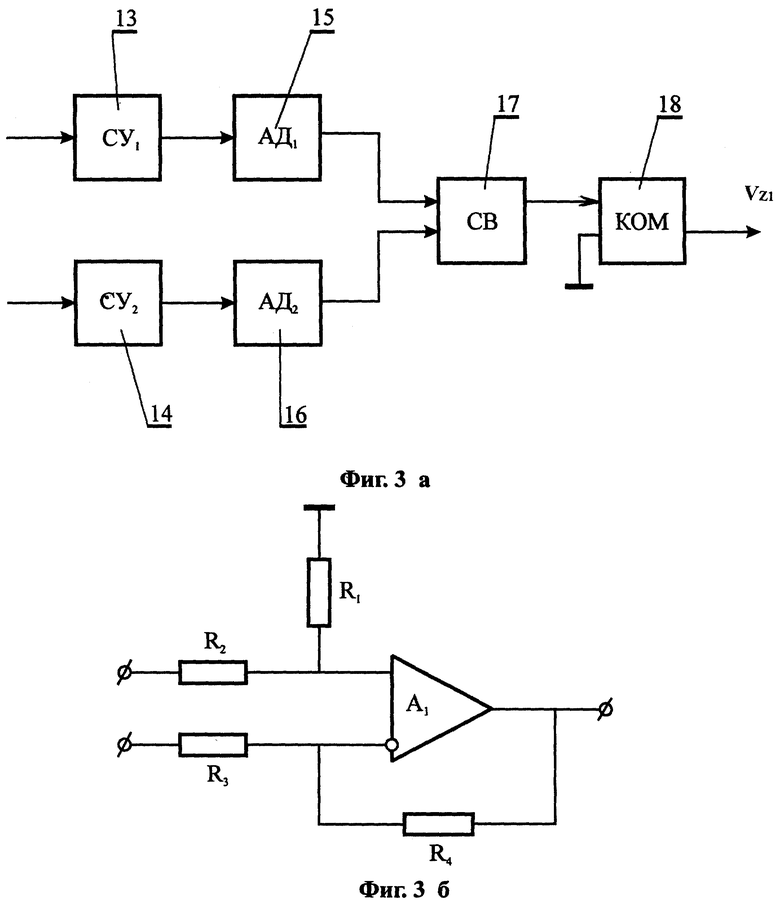
На фиг. 3а приведена структурная схема одного из возможных вариантов выполнения блока выделения сигнала дальности (8,9), где 13 и 14 - первый и второй селективные усилители, входы которых являются входами блока выделения сигнала дальности (8,9) (БВСД), а выходы подключены к входам соответствующих амплитудных детекторов 15,16, выходы которых подключены ко входам вычитающего усилителя 17, выход которого в свою очередь подключен к первому входу компаратора 18, на второй вход которого подается нулевой потенциал. Выход компаратора является выходом БВСД и одним из информационных выходов устройства Vz1 (или Vz2).
На фиг. 3б приведена схема вычитающего усилителя 17, где A1 - операционный усилитель.
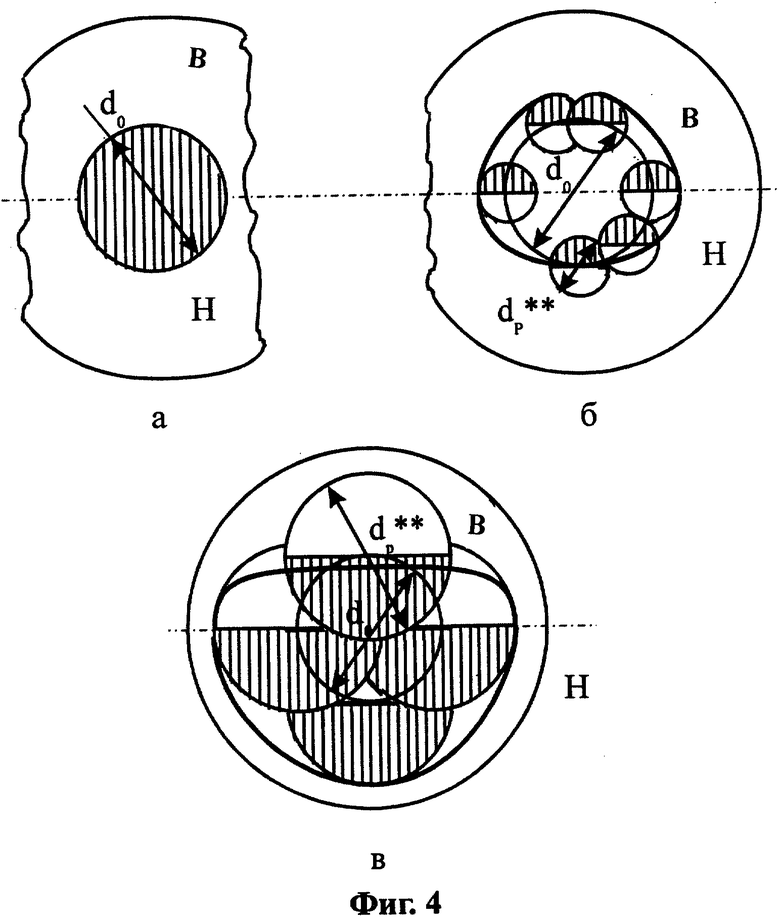
На фиг. 4 приводятся рисунки, поясняющие изменения диаметра и формы изображения подсвечиваемого кружка (пятна) в плоскости светочувствительного слоя позиционно-чувствительного четырехплощадочного фотоприемника 6 при использовании непрозрачной маски 4 при различных дальностях:
а) пятно находится в плоскости фокусировки объектива;
б) пятно перемещается от плоскости фокусировки в сторону объектива;
в) пятно перемещается от плоскости фокусировки в сторону удаления от объектива.
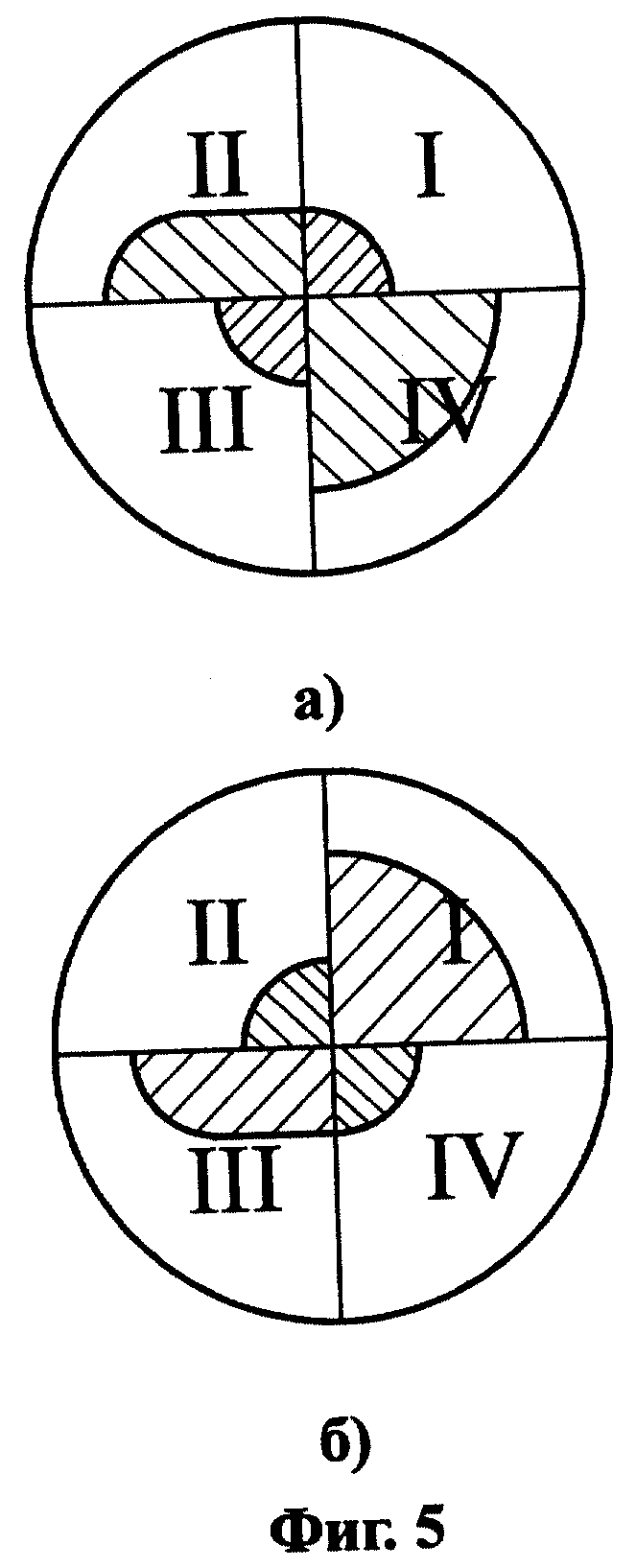
На фиг. 5 приводятся рисунки, поясняющие изменение изображения подсвечиваемого пятна в плоскости светочувствительного слоя фотоприемника 6 при различных дальностях:
а) пятно находится в плоскости фокусировки объектива 3;
б) пятно находится в плоскости фокусировки оптической системы, состоящей из части объектива 3 и дополнительного оптического элемента 5.
При использовании отличительных признаков описываемого устройства не выявлено каких-либо аналогичных известных решений.
Устройство для контроля скорости движения объектов функционирует следующим образом: излучение источника подсвета (лазера) 1 с помощью зеркала 2 направляется вдоль оптической оси объектива 3. В качестве источника подсвета может быть использован любой источник света, например светодиод. Для получения параллельного пучка света светодиод может быть установлен в фокусе линзы. С целью повышения отношения "сигнал-шум" перед объективом может быть установлен полосовой оптический фильтр, спектр пропускания которого совпадает с длиной излучения источника подсвета 1. Кроме того, излучение источника подсвета может быть модулировано по амплитуде на определенной фиксированной частоте. Для модуляции излучения полупроводникового лазера достаточно подать на излучатель электрические импульсы определенной частоты. В случае, когда в качестве источника подсвета используется светодиоды, полупроводниковый или твердотельный лазеры модуляция излучения достигается импульсным напряжением питания или накачки.
Изображение пятна подсвечиваемого источником подсвета на поверхности контролируемого объекта фокусируется объективом 3 и оптическим элементом 5 в плоскость размещения светочувствительного слоя позиционно-чувствительного четырехплощадочного фотоприемника 6.
Используемый позиционно-чувствительный четырехплощадочный фотоприемник является неразвертывающим. Этот приемник не требует накопления заряда. Со всех выходов четырех квадрантов независимо друг от друга в любой момент времени возможно снять информацию V1, V2, V3, V4, что позволяет модулировать по частоте подсвечивающий луч и осуществить частотную селекцию сигналов изображения, улучшить отношение сигнал/шум и повысить помехоустойчивость устройства. Светочувствительная поверхность квадрантов позиционно- чувствительного четырехплощадочного фотоприемника 6 размещается перпендикулярно оптической оси объектива 3. Причем оптическая ось проходит через центр фотоприемника - через точку пересечения границ раздела четырех квадрантов светочувствительного слоя. При этом одна из границ раздела параллельна краю непрозрачной шторки 4. Если подсвечиваемое пятно находится в плоскости, на которую фокусирован объектив 3, изображение этого пятна будет представлять собой кружок, диаметр которого определяется следующим образом:
где F - фокусное расстояние объектива 3,
Zсф - расстояние, на которое фокусирован объектив,
dΛ - диаметр подсвечивающего луча.
При расфокусировке, вызванной смещением контролируемого объекта и соответственно подсвечиваемого пятна относительно плоскости фокусировки объектива 3, происходит увеличение пятна изображения светочувствительного слоя четырехплощадочного фотоприемника 6.
Известно, что для точечного объекта и непрозрачной маски 4 в виде полукруга установленный перед объективом кружок расфокусировки представляет собой круг, разделенный линией, параллельной линии раздела прозрачной и непрозрачной половинок входного зрачка объектива 3, т.е. маски 4. Излучение, составляющее каждую из половинок изображения, проходит через соответствующие половинки входного зрачка объектива 3. Причем порядок следования этих половинок определяется в зависимости от того - ближе находится точечный объект относительно плоскости фокусировки, а диаметр кружка расфокусировки dр может быть определен по формуле (4):
где D - диаметр входного зрачка объектива,
F - фокусное расстояние объектива,
Z - расстояние от объектива до объекта,
Zсф - расстояние, на которое сфокусирован объектив.
Благодаря непрозрачной маске (шторке) 4, установленной перед объективом, для точечного объекта кружок расфокусировки представляет собой половину круга, граница которого параллельна краю непрозрачной маски (шторки) 4, а также параллельная границе раздела квадрантов светочувствительного слоя четырехплощадочного фотоприемника 6.
На фиг. 4 представлены возникающие при этом картинки.
Так, для сфокусированного подсвечиваемого пятна его изображение проектируется на фоточувствительную поверхность четырехплощадочного фотоприемника 6 симметрично относительно границы раздела верхней (В) (квадранты I, II) и нижней половинок. При этом напряжение, вырабатываемое верхней и нижней половинками фотоприемника, равны. Смещение подсвечиваемого пятна по дальности вызывает расфокусировку, причем получаемое при этом изображение становится несимметричным относительно границы раздела половинок В и H фотоприемника 6.
На фиг. 4б показано как формируется результирующее изображение подсвечиваемого пятна при его перемещении в сторону приближения от плоскости фокусировки. Приближение вызывает размытие изображения пятна в кружок расфокусировки диаметром dр*. При этом, так как размер изображения подсвечиваемого пятна, перекрывающий верхнюю половину (I и II квадранты) четырехплощадочного фотоприемника 6, больше, чем размер нижнего изображения, то напряжения V1 + V2, вырабатываемые верхними квадрантами I и II, также будут больше, чем нижними (III, IV) V3 + V4.
При удалении подсвечиваемого пятна от плоскости фокусировки происходит рост диаметра кружка расфокусировки на величину dр**, результирующее изображение подсвечиваемого пятна примет вид, изображенный на фиг. 4в. При этом напряжение V3 + V4, вырабатываемое нижней половиной (квадрантами III, IV) четырехплощадочного фотоприемника 6, будет больше напряжения V1 + V2, вырабатываемого верхней половиной (квадрантами I, II).
Если же оставшуюся открытой часть входного зрачка объектива перекрыть наполовину дополнительным оптическим элементом (одной четвертой частью сферической линзы), то изображение, получаемое на фоточувствительной поверхности приемника, будет таким, как показано на фиг. 5. На фиг. 5а показано изображение, получаемое в момент, когда подсвечиваемое пятно находится в плоскости, на которую сфокусирован объектив 3. На фиг. 5б показано изображение, полученное в момент нахождения пятна в плоскости, на которую сфокусирована оптическая система, состоящая из части входного зрачка объектива 3 и дополнительного оптического элемента 5. Из этих рисунков видно, что в первом случае площади частей пятна расфокусировки, попадающих на сектора I и III фотоприемника, а следовательно, и электрические сигналы, снимаемые с них VI и VIII равны между собой. Во втором случае равны площади частей пятна, попадающих на сектора II и IV, что соответствует равенству VII и VIV.
Обработка величин электрических сигналов VI, VII и VIII, VIV с целью извлечения информации о скорости движения объекта осуществляется в блоке обработки сигналов 7.
Блок обработки сигналов дальности 7 (фиг. 2) функционирует следующим образом: напряжения VI и VIII с 1, 3 выходов квадрантов позиционно-чувствительного четырехплощадочного фотоприемника 6 поступают на входы первого блока выделения сигнала дальности БВСДI) 8, а напряжения VII и VIV с выходов 2, 4 квадрантов фотоприемника 6 - на входы второго БВСД2 9. Оба БВСД 8, 9 абсолютно одинаковы.
БВСД имеет на входе первый 13 и второй 14 селективные (резонансные) усилители, настроенные на частоту модуляции лазерного излучения (фиг. 3а). Усиленные сигналы детектируются амплитудными детекторами 15, 16 и поступают на входы вычитающего усилителя 17. Результат операции VI - VIII (или VIII - VIV) далее поступает на вход компаратора 18, где сравнивается с нулем, установленным на его втором входе. Если расстояние до подсвечиваемой точки объекта равно расстоянию Z1, на которое сфокусирован объектив устройства, сигнал на выходе схемы вычитания равен нулю. При расстоянии, большем сфокусированного, сигнал на выходе схемы вычитания меньше нуля, а при расстоянии до точки подсвета, меньшем сфокусированного, - больше нуля.
Выбором объектива 3 и оптического элемента 5 определяется зона по дальности, Z1 и Z2, при попадании в которую приближающее подсвечиваемое пятно проявление сигнала сперва на выходе первого БВСД18, а при дальнейшем и на выходе второго БВСД29.
Таким образом, БВСД 8 и ББСД 9 вырабатывают электрические сигналы Vz1 и Vz2 при прохождении объектов плоскостей, удаленных на расстоянии Z1 и Z2 от объектива, соответственно. Сигналы VI и VII последовательно поступают на соответствующие первый и второй входы триггера 10, который формирует импульс, дальность которого соответствует времени прохождения расстояния ΔZ = Z1-Z2. Формирователь импульсов 11, запускаемый сигналом Vz1, формирует импульс эталонной длительности, соответствующий допустимому значению скорости объекта.

Схема сравнения длительностей 12 сравнивает τ и τэ и на выходе формирует сигнал ± ΔV, величина и полярность которого характеризует отклонение скорости объекта от допустимой.
Выходные сигналы блоков выделения сигналов дальности Vz1 и Vz2 могут быть использованы как информационные для определения границ зон "предупреждения" и "опасного приближения" в системах предупреждения столкновения транспортных средств, захватов роботов-манипуляторов и т.д.
Источник подсвета 1 может быть выполнен как на основе газового лазера, так и на базе полупроводникового лазера, например, типа ТН-10, снабженного фокусирующей оптической системой, создающей узкий пучок подсвета. Причем частота импульсов излучения должна соответствовать резонансной частоте настройки усилителей 13 и 14. В качестве позиционно-четырехплощадочного фотоприемника 6 может использоваться фотодиод ФДК-142. В качестве компараторов могут быть использованы микросхемы КР-597СА2. Схема вычитающего усилителя может быть собрана на операционном усилителе 5. Если цель двигается и находится на оптической оси объектива устройства, то оно может работать без источника подсвета.
Используя в составе блока обработки сигналов 7 микроЭВМ со средствами ввода-выхода аналоговой информации, возможно произвести линеаризацию характеристики датчика и возложить на микроЭВМ все вычислительные операции.
При расположении и движении светящейся цели вдоль оси объектива устройства оно может работать и в пассивном режиме, т.е. без источника подсвета. Такие задачи возникают, когда светящаяся цель двигается вдоль одной прямой или датчик установлен на следящей платформе. В этом случае необходимость в признаках 1 и 2 отпадает, а усилители 13 и 14 в блоке обработки сигналов должны быть усилителями постоянного тока.
По сравнению с прототипом предложенное техническое решение обладает более широкими функциональными возможностями. Оно позволяет определить дальность и скорость относительного движения объекта.
Выходные сигналы рассогласования Vz1Vz2 могут быть поданы для отработки на рулевые органы управления устройством. Объект, на котором установлен измеритель, удаляется или приближается, сводя сигнал рассогласования к нулю. Данное устройство может быть использовано в теплотехнике в качестве указателя препятствий слепым. При этом сигналы рассогласования Vz1Vz2 могут быть преобразованы в звуковой сигнал, тональность которого меняется в зависимости от величины и знака Vz1Vz2.
Устройство с высокой экономической эффективностью может быть применено в системах управления роботов-манипуляторов и в системах предупреждения столкновений транспортных средств и летательных аппаратов. Сигнал рассогласования также может быть использован для автоматической фокусировки объектива на объект.
Источники информации, принятые во внимание при составлении заявки
1. Устройство для определения скорости движения объектов. Заявка Великобритании N 1410553, G 01 P 3/68, 1975 г.
2. Устройство для измерения дальности. Патент США N 3765765, НКИ 365-4.
3. Воробьев С. А. , Баранов Ю.И., Типаев В.В. Фотоэлектрический датчик скорости вращения. SU N 1081543, G 01 P З/36 23.03.84.
4. Украинский С.В. Стереоскопический базис однообъективной стереотелевизионной системы. "Техника кино и телевидения". N7, с.48, 1982 г.
5. Шилов В.Л. Линейные интегральные схемы. М.: Сов. Радио, 1979, с.158.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оптико-электронного наведения и дистанционного подрыва управляемой ракеты и комплексированная система для его реализации | 2022 |
|
RU2791420C1 |
| Способ оптико-электронного наведения и дистанционного подрыва управляемого снаряда и комплексированная система для его реализации | 2021 |
|
RU2770951C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ФОКУСИРОВКИ ЛАЗЕРНОГО ФОТОПОСТРОИТЕЛЯ | 2001 |
|
RU2207637C2 |
| Способ неконтактного подрыва и неконтактный датчик цели | 2021 |
|
RU2771003C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАРЕЗНОГО СТРЕЛКОВОГО ОРУЖИЯ И РЕАЛИЗУЮЩЕЕ УСТРОЙСТВО | 2015 |
|
RU2603334C2 |
| Способ автоматического определения фокуса оптической системы и устройство для его осуществления | 1988 |
|
SU1571458A1 |
| Светомодулирующее устройство для записи фотографических фонограмм | 1989 |
|
SU1654867A1 |
| Устройство для автоматической фокусировки объектива | 1982 |
|
SU1068873A1 |
| Устройство для определения расфокусировки съемочной камеры (его варианты) | 1982 |
|
SU1114909A1 |
| Способ формирования радиолокационного изображения в реальном масштабе времени путем оптической корреляционной обработки сигналов и устройство для его осуществления | 1991 |
|
SU1801218A3 |
Устройство предназначено для использования в навигации. Источник подсвета, зеркало, объектив и позиционно-чувствительный четырехплощадочный фотоприемник оптически сопряжены. Выходы квадрантов фотоприемника соединены с блоком обработки сигналов. Оптический элемент в виде прямоугольного сектора сферической линзы оптически сопряжен с объективом. Непрозрачная маска установлена так, что перекрывает часть входного зрачка объектива. Границы раздела квадрантов фотоприемника параллельны краям непрозрачной маски и оптического элемента. Обеспечивается расширение функциональных возможностей устройства. 2 з.п. ф-лы, 5 ил.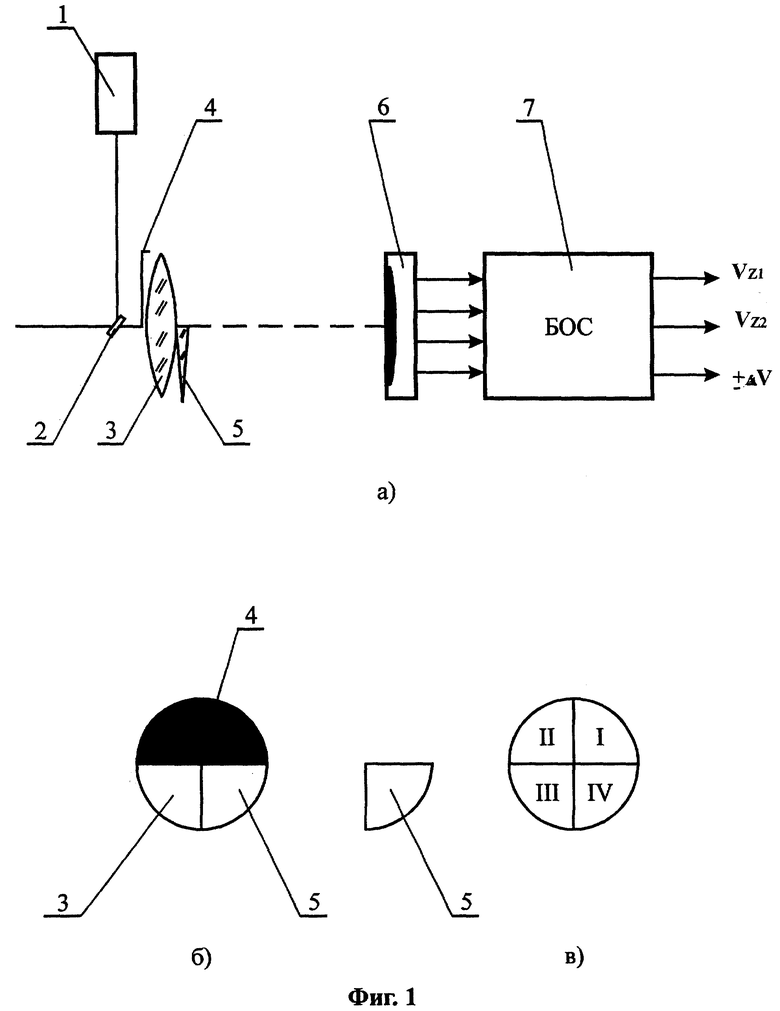
| Фотоэлектрический датчик скорости вращения | 1982 |
|
SU1081543A1 |
| Фотоэлектрический датчик скоро-СТи ВРАщЕНия | 1979 |
|
SU801312A1 |
| Биотрансплантат для лечения дисплазии суставов и способ его получения | 2017 |
|
RU2659204C1 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ЗАРЯЖЕННЫХ ЧАСТИЦ ПО МАССАМ | 1999 |
|
RU2174863C2 |

