Изобретение относится к оптическим способам обнаружения и идентификации объектов в трехмерном пространстве, наблюдаемых оптико-электронной системой в одном кадре и одной экспозиции, определения их координат, дальности и геометрических характеристик.
1. Известен способ извлечения информации об удаленности объектов с использованием единственного дефокусированного снимка. Метод основан на анализе величины размытия изображения в точках, выделенных на нем контуров, соответствующих граничным точкам объектов [1]. На исходном изображении выделяются контуры, соответствующие локальным максимумам модуля градиента яркости. Координаты контурных точек запоминаются для дальнейшего анализа. Затем изображение дополнительно размывается гауссовым фильтром с заданным известным параметром дисперсии. По величине отношения модулей градиентов исходного и дополнительно размытого изображения в точках контуров оценивается величина дефокусировки исходного изображения в зонах, соответствующих границам объектов. Полученные оценки образуют разреженную карту относительной удаленности границ сфотографированных объектов. При помощи специально выбранного метода интерполяции оценки удаленности распространяются на остальные точки изображения, образуя «плотную карту глубины».
Недостатком известного способа является достаточно узкий диапазон дальностей и сравнительно невысокую точность измерения дальности до объектов, а также известный способ не предусматривает возможность калибровки по линейным размерам объектов в наблюдаемом пространстве и возможность идентификации наблюдаемых объектов.
2. Известен способ селекции объекта на удаленном фоне [2]. Способ заключается в приеме и формировании двух изображений в двух пространственно-разнесенных точках, одновременной регистрации сформированных изображений, определении параллактического смещения фона путем формирования взаимокорреляционной функции двух зарегистрированных изображений и определении ее максимума, смещении первого из зарегистрированных изображений на величину параллактического смещения фона в направлении, противоположном этому смещению, получении разностного изображения путем вычитания смещенного и второго зарегистрированных изображений, разделении разностного изображения на области, имеющие противоположные знаки, и анализе фрагментов областей.
Известный способ имеет следующие недостатки. Во-первых, за искомый объект могут быть приняты случайные флуктуации в разностном изображении. Во-вторых, относительно низкая селективность способа в случае одновременной регистрации изображений группы объектов, когда его применение может привести к селекции «ложных» объектов.
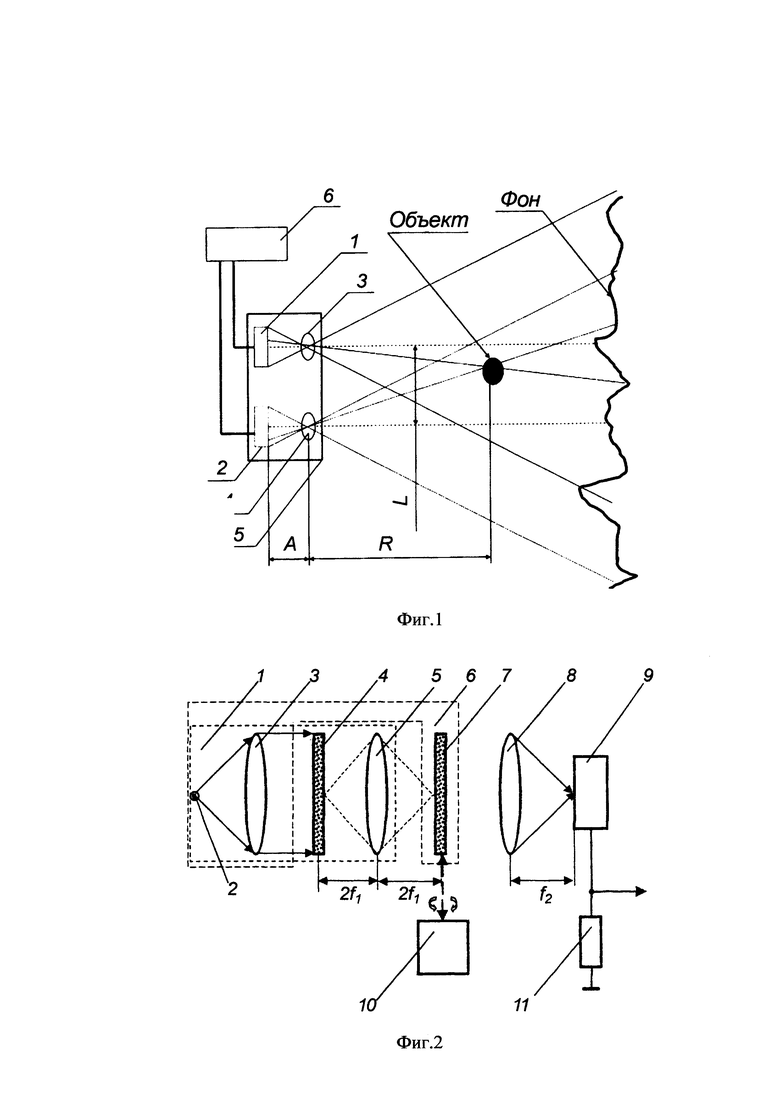
3. Известен способ обнаружения объектов [3], который заключается в приеме и формировании двух изображений в двух пространственно-разнесенных точках и одномоментной регистрации каждого фрагмента опорного и сравниваемого цифровых изображений двумя идентичными видеосистемами (фиг. 1). На фиг. 1 приведено схематическое расположение двух видеосистем и объекта относительно фона. Видеосистемы содержат многоэлементные CMOS-матрицы 1 и 2, объективы 3 и 4, полностью идентичные друг другу. Матрицы и объективы зафиксированы на основании 5 на небольшом расстоянии L относительно друг друга. Выходы матриц 1 и 2 подключены к блоку 6 обработки информации. Каждая из видеосистем выполнена на основе многоэлементного высокоскоростного фотоприемника, например, CMOS-матрицы, и содержит объектив. Обе видеосистемы предварительно фиксируют на небольшом, по сравнению с удалением от предполагаемого места появления объекта, расстоянии между собой параллельно друг другу с направлением на контролируемое пространство. Анализ изображений проводят при помощи определения величин смещения А характерных фрагментов сравниваемого изображения с аналогичными фрагментами опорного при максимально возможном их совпадении в направлении параллактического смещения с последующим выявлением селектируемых и фоновых объектов из полученных смещений А.
Недостатки известного способа является сложность и значительные габариты конструкции устройства, реализующего данный способ.
4. Известен некогерентный оптический коррелятор [4], состоящий из следующих элементов (фиг. 2): 1 - источник света, 2 - коллиматор, 3 - линза, 4 - фотопластинка, 5 - линза, 7 - фотопластинка, 8 - линза, 9 - фотоприемник, 10 - устройство сканирования, 11 - нагрузка. Некогерентный оптический коррелятор функционирует следующим образом. Изображения эталонного и исследуемого объектов предварительно регистрируют на фоточувствительном носителе для получения амплитудных транспарантов (диапозитивов или негативов). Затем полученные транспаранты, пропускание которых по интенсивности пропорционально распределению освещенности в исходных изображениях объектов, помещают соответственно во входной и выходной плоскостях первой линзы. Некогерентное излучение точечного источника формируют коллимирующей линзой в квазиплоскую считывающую световую волну, которой освещают транспарант с записью изображения исследуемого объекта. Пройдя сквозь транспарант, считывающий свет формирует во входной плоскости распределение интенсивности, пропорциональное изображению исследуемого объекта.
Полученное изображение первая линза проецирует на выходную плоскость, в которой размещен транспарант с записью изображения эталонного объекта. Прошедший через оба транспаранта свет собирается второй линзой на фоточувствительную поверхность фотоприемника, расположенную в фокальной плоскости второй линзы. Для совмещения изображений эталонного и исследуемого объектов транспарант с эталонным изображением перемещают в плоскости, перпендикулярной оптической оси в двух взаимно перпендикулярных направлениях. Собирая свет, прошедший через оба транспаранта, вторая линза тем самым реализует операцию пространственного интегрирования двумерной функции взаимной корреляции изображений исследуемого и эталонного объектов. Фотоприемник преобразует полученный оптический сигнал в электрический сигнал, пропорциональный двумерной функции взаимной корреляции изображения исследуемого объекта и изображения эталонного объекта. При совпадении исследуемого изображения с эталонным по положению, размерам и угловой ориентации электрический сигнал на выходе фотоприемника окажется максимальным.
Устройство оптического коррелятора состоит из точечного источника некогерентного излучения, коллимирующей линзы, формирующей квазиплоскую волну считывающего излучения, двух линз, двух транспарантов (диапозитивов), на которых соответственно зарегистрированы изображения эталонного и исследуемого объектов, устройства для перемещения транспаранта с эталонным изображением по двум взаимно перпендикулярным направлениям в плоскости, перпендикулярной оптической оси, а также фотоприемника, преобразующего результат оптического вычисления двумерной корреляционной функции в электрический сигнал.
Недостатками известного способа и устройства оптического коррелятора является сложная конструкция устройства, связанная с необходимостью совмещения транспарантов и не позволяет осуществлять работу в реальном времени из-за необходимости предварительной регистрации изображений исследуемого и эталонного объектов на фоточувствительном носителе. Кроме того, известный способ и устройство не дает возможности анализировать объекты трехмерной сцены.
5. Известен способ оптической согласованной фильтрации лучей, строящих изображения исследуемого объекта [5]. Способ основан на сравнении входного образа с эталонным образцом по степени корреляции волновых фронтов.
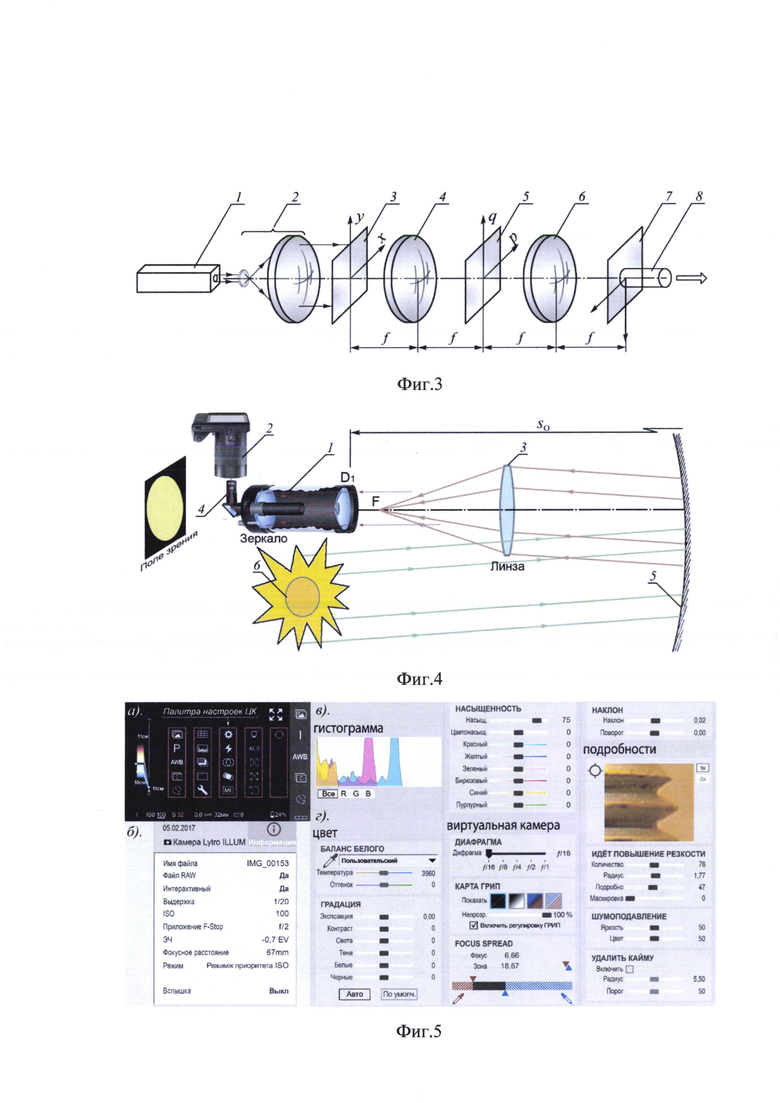
Схема устройства, реализующего данный способ оптической согласованной фильтрации на базе голографического фильтра, известного как голографический коррелятор, представлена на фиг. 3 и состоит из следующих элементов: 1 - лазер, 2 - коллиматор, 3 - входная плоскость, 4, 6 - оптические системы для Фурье-преобразования, 5 - голографический фильтр, 7 - выходная плоскость, 8 - фотоприемник. Решения о соответствии осуществляется по величине выходного сигнала коррелятора, математически описываемого выражением:

где Θ - переменный параметр, характеризующий состояние контролируемых объектов; х', у' - координаты плоскости фильтрации; t1 - амплитудное пропускание входной плоскости с эталонным образцом; t2 - амплитудное пропускание входной плоскости с контролируемым образцом;  - символ операции корреляции.
- символ операции корреляции.
Недостатком известного способа и схемы устройства оптического коррелятора является необходимость получения голограмм объекта и эталона, что не позволяет осуществлять работу в реальном времени из-за необходимости предварительной регистрации изображений исследуемого и эталонного объектов на фоточувствительном носителе.
В качестве прототипа выбран способ наблюдения [6] за удаленными объектами оптико-электронной системой (ОЭС), включающий регистрацию удаленных объектов оптической системой (ОС) наблюдения на матричном фотоприемнике цифровой камерой пленооптического типа (фиг. 4). На фиг. 4 схематично приведена видеосистема, в которой расстояние до наблюдаемого объекта задается дополнительной зеркально-линзовой системой. Перед телескопом 1 и регистратором изображения 2 размещаются дополнительные линзы 3, корректор фокуса 4 или неплоское зеркало 5, которое формирует масштабное изображение наблюдаемого объекта 6. В процессе наблюдения производится алгоритмическое изменение поля зрения, углов визирования ОС, фокусировки и глубины резкости отображаемого пространства (ГРИП) расположения объектов в пространстве, что позволяет в одном кадре одной экспозиции проводить анализ разноудаленных объектов наблюдаемого пространства. Использование данного способа позволяет исключить оптические искажения оптической системы, дополнительно проводить пространственную калибровку оптико-электронной системы [7], что повышает точность измерений координат и геометрических характеристик, а также достоверность анализа наблюдаемых объектов.
Устройство, реализующее указанный способ, содержит оптическую систему наблюдения, пленооптическую камеру, компьютерную систему, программное обеспечение, реализующее алгоритмы формирования и анализа изображений. При этом основная и дополнительная оптическая система должна обеспечивать возможность получения на матричном фотоприемнике массива не перекрывающих друг на друга субапертурных изображений [8-10], которые обеспечивают возможность формировать в выходном изображении глубину резко отображаемого пространства, дистанцию фокусировки, угол визирования и масштаб объектов наблюдаемого пространства.
Недостатком способа и устройства прототипа является отсутствие возможности регистрации плоских двухмерных или трехмерных шаблонов объектов, что снижает достоверность поиска интересуемых объектов в наблюдаемом пространстве на заданном удалении, и требует дополнительного анализа изображений без привязки к характерным признакам интересуемых объектов.
Задачей, стоящей перед настоящим изобретением, является повышение точности обнаружения (селекции) одной и более целей в условиях их разноудаленности, точности распознавания целей, определения их координат и характеристик в объеме наблюдаемого пространства.
Поставленная задача решается следующим образом.
В способе используется цифровая регистрация объектов наблюдаемого пространства пленооптической камерой с массивом микролинз перед матрицей фотодиодов [8, 9], которая обеспечивает регистрацию направления хода лучей из наблюдаемого пространства в виде массива субапертурных изображений на матрице фотодиодов фотоприемного устройства. Формирование плоского изображения с заданными параметрами (дистанция фокусировки, глубина резко отображаемого пространства, угол визирования, масштаб) происходит алгоритмически путем суммирования сигналов с фотодиодов [9, 10], например, в приложении «Lytro Desktop») [10] (фиг. 5). На фиг. 5 приведен интерфейс программы Lytro Desktop (б, в, г), иллюстрирующий возможность задания параметров фоторегистрации пленооптической камеры (а), задания параметров конвертации файла светового поля (г) в плоское изображение (дистанции фокусировки и глубины резкости отображаемого пространства).
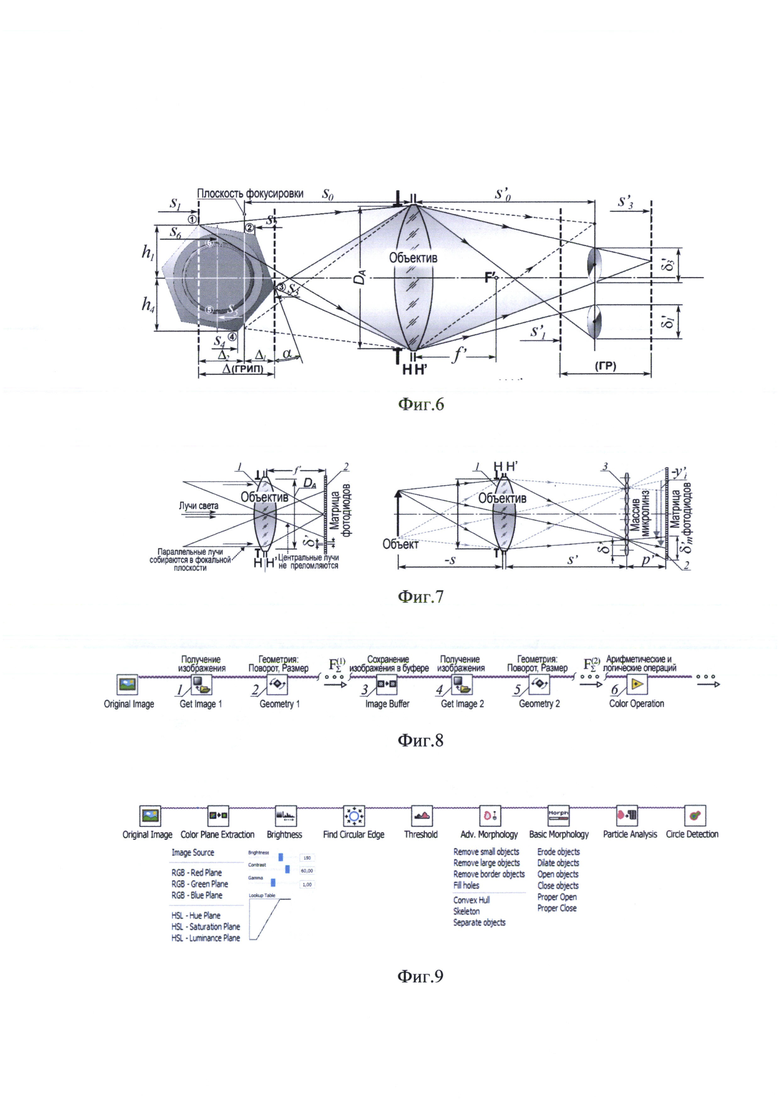
Алгоритм формирования плоского изображения задает расстояние фокусировки и глубину резко отображаемого пространства (ГРИП) оптической системы наблюдения (фиг. 6) [11]. Формирование изображения на поверхности фотоприемника происходит основным объективом пленооптической камеры с учетом его ГРИП, но без учета дифракции:

где Δ1 - передняя граница ГРИП, Δ2 - задняя граница ГРИП, s0 - дистанция фокусировки, ƒ' - фокусное расстояние объектива,  - значение знаменателя (K) относительного отверстия (N) объектива, δ' - диаметр кружка рассеяния лучей в плоскости изображения.
- значение знаменателя (K) относительного отверстия (N) объектива, δ' - диаметр кружка рассеяния лучей в плоскости изображения.
Формирование изображения оптической системой для пленооптической камеры с массивом микролинз имеет особенности (фиг. 7). На фиг. 7 приведена иллюстрация процесса контроля объемных объектов различными оптическими системами: обычная проектирующая система (а), оптическая система регистрации направления хода лучей (б) (оптическая система светового поля). Относительное отверстие и ГРИП для пленоптической камеры определяется алгоритмически вычисляемой виртуальной апертурой (NV), диапазон значение которой зависит от конструктивных параметров камеры [9]. Существует возможность увеличение этого параметра за пределы физической апертуры, определяемое количеством пикселей субапертурных изображений (например, 1:2⇒1:1). Кроме того, виртуальная апертура оптической системы NV может быть увеличена при использовании двух параллельно расположенных пленооптических камер [12].
Объекты, находящиеся вне зоны ГРИП Δ1+Δ2 имеют размытие, т.е. границы контуров имеют значительно более слабый градиент яркости, поэтому в процессе идентификации наблюдаемых объектов известными алгоритмами они будут участвовать по иному, т.е. в процессе выделения доминантной информационной составляющей будут иметь характер размытого фона [13]. В то же время степень размытия границ объектов в изображении определяет возможность контроля состояния оптической системы наблюдения [14], что позволяет определять степень оптической расфокусировки на наблюдаемые объекты.
Функции корреляции волновых фронтов, реализуемые на уровне регистрации направления хода лучей, по аналогии с методами, используемыми в голографии [15] (например, устройство голографического коррелятора [5]), которые математически можно реализуются бинарными морфологическими функциями М заданных слоев изображения [16]:

Дополнительно для анализа объектов в слоях изображений можно использовать функции преобразования слоев изображения, например, изменения их геометрии [17]:

Поэтому для корреляционной обработки необходимо иметь два изображения: контролируемое изображение наблюдаемых объектов и изображение плоского или трехмерного шаблона.
Алгоритм корреляционной обработки двух изображений (скрипт в приложении Vision Assistent) представлен на фиг. 8 [17]. Первое полученное из файла изображение 1 сохраняется в буфере памяти 3, затем загружается второе изображение 4. Функции 2 и 5 (Geometry) позволяют развернуть и масштабировать изображения, что дает возможность провести калибровку слоев. К каждому изображению можно дополнительно применять свои наборы различных функций обработки изображений:  Морфологическая функция 6 (Color Operation) позволяет проводить следующие бинарные операции над слоями изображения: «Add», «Subtract», «Multiply», «Divide», «Multiply Divide», «Modulo)), «Absolute Difference)), «And)), «Not AND)), «Or», «Not Or)), «Exclusive Or», «Not Exclusive Or», «Logical Difference)).
Морфологическая функция 6 (Color Operation) позволяет проводить следующие бинарные операции над слоями изображения: «Add», «Subtract», «Multiply», «Divide», «Multiply Divide», «Modulo)), «Absolute Difference)), «And)), «Not AND)), «Or», «Not Or)), «Exclusive Or», «Not Exclusive Or», «Logical Difference)).
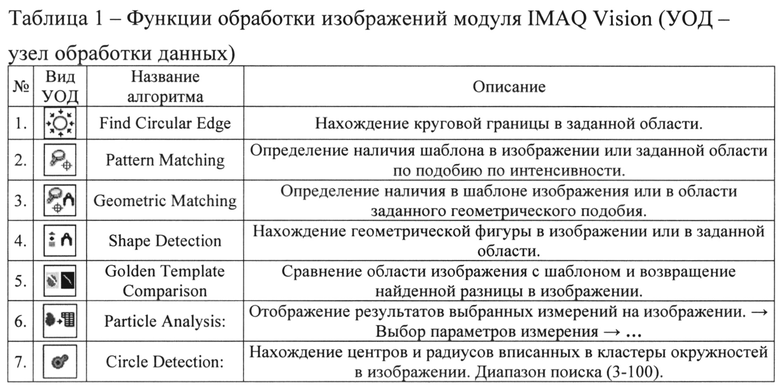
Далее для определения координат и характеристик целей могут быть использованы различные алгоритмы [18] на базе известных математических методов. Алгоритм измерения характеристик целей (фиг. 9) использует методы анализа градиента яркости, яркостных измерений координат и формы объекта, поиска шаблонов в изображении, бинаризации изображений, анализа бинарных кластеров (определения их координат и геометрических параметров) [11, 19].
Все алгоритмы анализа и измерений координат и формы объектов реализуемы в модуле IMAQVision среды программирования фирмы National Instruments (NI) LabVIEW [19, 20] и представлены в таблице 1.
Сущность изобретения заключается в формировании корреляционного изображения морфологического попиксельного сравнения выделяемых изображений слоев наблюдаемого пространства полученных пленооптической камерой с матричным фотоприемником с изображением двухмерного шаблона или слоем изображения трехмерного шаблона интересуемых объектов, алгоритмическом вычислением в этом изображении координат, удаленности и характеристик объектов, соответствующих их положению в трехмерном пространстве. В плоскости одного или двух фотоприемников пленооптических камер одновременно получают два изображения с находящимися в пространстве объектами и изображение двухмерного или трехмерного шаблона объектов, по степени корреляции которых, определяют расстояние до наблюдаемых объектов вдоль направления оси визирования пленооптической камеры наблюдения, регистрирующей координаты и направления хода лучей, формирующей на матрице фотоприемника массив субапертурных изображений. Массив субапертурных изображений позволяет формировать плоские изображения с возможностью поворота и масштабирования, что дает возможность максимально совмещать его с изображением плоского или слоя трехмерного шаблона объектов. Выявление (обнаружение) цели производится корреляцией их послойных изображений с заданным шаблоном, при этом изображение цели в слоях наблюдаемого пространства, удаленных на другие расстояния в процессе не участвуют.
Кроме того, после обнаружения цели, реализуется ряд новых возможностей:
- анализ ее геометрических размеров и расположения относительно других объектов в наблюдаемом ОЭС пространстве с более высокой точностью;
- определение расстояния до цели R в зависимости от установленной дистанции фокусировки и глубины резко отображаемого пространства;
- регистрация наблюдаемого пространства в одном кадре в одной экспозиции, что повышает обнаружительную способность ОЭС и упрощает анализ трехмерного расположения объектов в наблюдаемом пространстве.
Технический результат изобретения заключается в повышении точности определения координат и геометрических характеристик объектов в наблюдаемом трехмерном пространстве с сохранением возможности поиска и распознавания всех объектов наблюдаемой области пространства в одной сцене, а также в наличии возможности определения расстояния до интересуемого объекта.
Для достижения технического результата предлагается способ обнаружения и определения характеристик целей на основе регистрации и обработки хода лучей от объектов в наблюдаемом пространстве, который реализуется следующим образом.
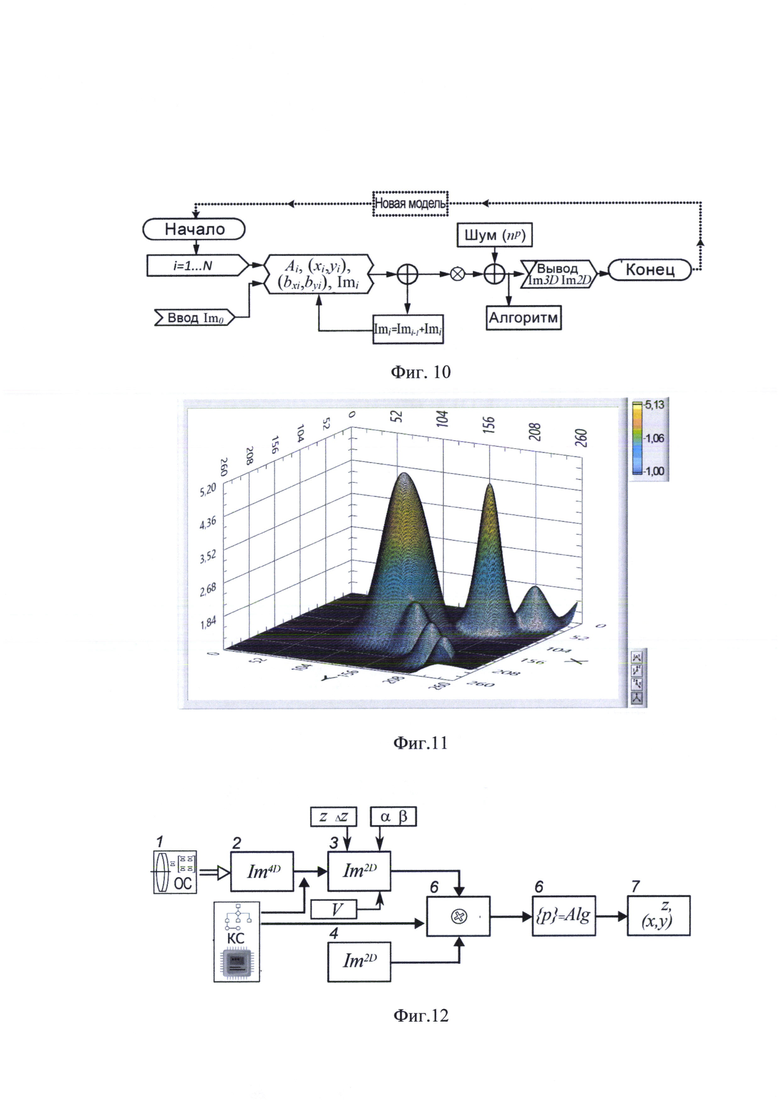
В начале создают шаблон ансамбля (комбинации) интересуемых целей (фиг. 10, 11) из математической модели или путем регистрации объектов в некоторый момент времени (t0). На фиг. 10 приведен алгоритм формирования цифрового шаблона ансамбля объектов. На фиг. 11 приведена иллюстрация цифрового шаблона ансамбля объектов.
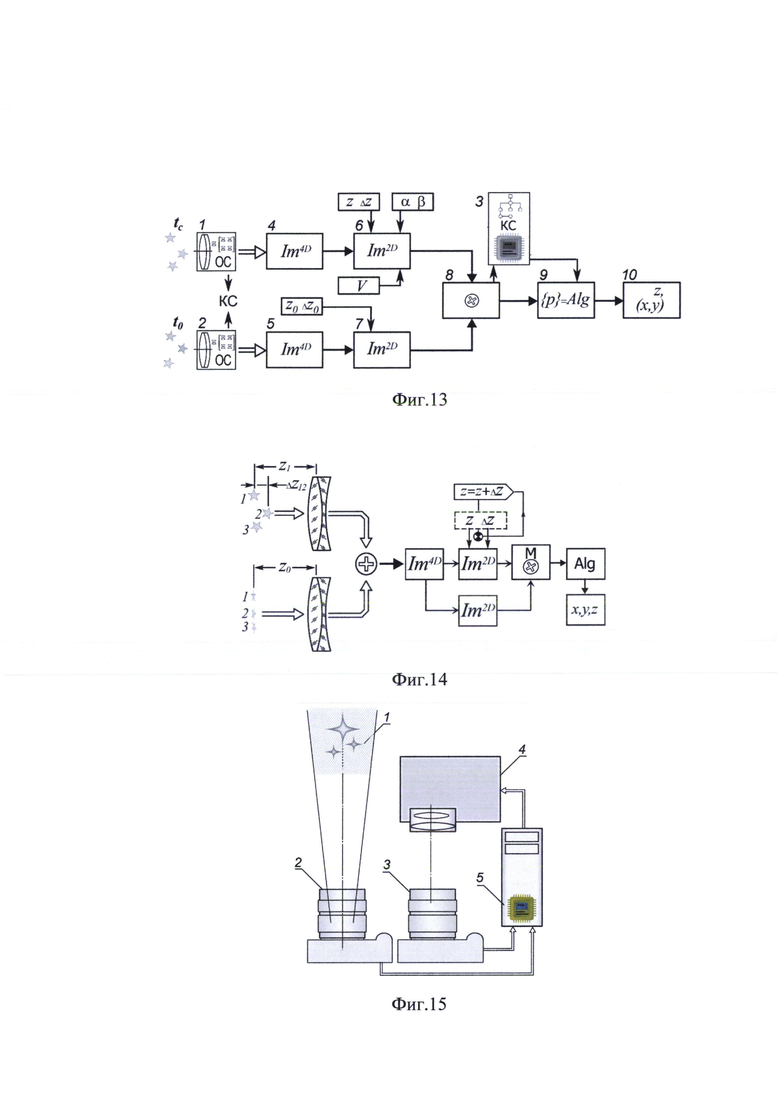
В начале поиска регистрируют объекты наблюдаемого пространства в текущий момент времени (t1) оптической системой с пленооптической камерой, регистрирующей направление и координаты лучей света от наблюдаемых объектов (фиг. 12-14). На фиг. 12 приведена структурная схема способа (ОЭС наблюдения на базе цифровой камеры светового поля и шаблон изображений целей). На фиг. 13 приведена структурная схема способа (система мониторинга наблюдаемого пространства). На фиг. 14 приведена структурная схема способа (формирование 3D изображения и 2D шаблона).
Алгоритмически синтезируют плоское изображение максимальной глубины резкости наблюдаемого пространства (Im0). Объекты могут находиться в заранее неизвестном месте, поэтому, изменяя угол визирования и масштаб, совмещают изображение с шаблоном объектов (Ims).
Алгоритмически синтезируют набор слоев изображений наблюдаемого пространства  которые определяют диапазон дальностей {Lj} нахождения целей (j=1, М). Алгоритмически производят корреляцию с шаблоном
которые определяют диапазон дальностей {Lj} нахождения целей (j=1, М). Алгоритмически производят корреляцию с шаблоном  определяют достоверность нахождения интересуемого объекта в двухмерном слое пространства L+ΔL, используя измерительные алгоритмы, определяют его координат геометрические характеристики объектов (целей).
определяют достоверность нахождения интересуемого объекта в двухмерном слое пространства L+ΔL, используя измерительные алгоритмы, определяют его координат геометрические характеристики объектов (целей).
Используя высокоточные алгоритмы анализа градиента яркости границ изображений определяют смещение Δ расстояний объектов в каждом синтезированном изображении слоя пространства.
Устройство, реализующее предложенный способ, включает пленооптическую камеру, двухмерный или трехмерный шаблон объекта в цифровом виде, осветитель шаблона, светоделительный элемент сводящий изображение наблюдаемого пространства с двухмерным или трехмерным изображением шаблона и вычислительное устройство, алгоритмически формирующее изображения разноудаленных слоев трехмерного изображения наблюдаемого пространства, масштабируемые и сдвигаемые изображения шаблона объектов, морфологические попиксельные операции сравнения изображений слоев наблюдаемого пространства и шаблона, вычислительные алгоритмы определения координат и характеристик целей в изображении (фиг. 15-17). Устройство, реализующее предложенный способ, другими словами по аналогий с ранее представленными решениями можно именовать как коррелятор светового поля. На фиг. 15 приведена схема устройства реализующее предложенный способ (коррелятор светового поля) с двумя пленооптическими камерами, где 1 - наблюдаемая область пространства, 2 и 3 - цифровые пленооптические камеры, 4 - проецирующее устройство, 5 - компьютерная система. На фиг. 16 приведена схема устройства реализующее предложенный способ (коррелятор светового поля) через светоделитель, расположенный по оси основной пленооптической камеры, где 1 - наблюдаемая область пространства, 2 - цифровая пленооптическая камера, 3 - светоделитель, 4 - проецирующее устройство, 5 - компьютерная система. На фиг. 17 представлен макет устройства для регистрации шаблонов удаленных объектов оптической системой с пленооптической камерой, состоящий из следующих элементов: 1 - цифровая камера светового поля, 2 - дополнительная оптическая система (зеркало телескопа), 3 - макет наблюдаемого объекта. В плоскости одного или двух фотоприемников пленооптической камеры одновременно получают два изображения с находящимися в пространстве объектами и изображение изображения двухмерного шаблона или слоев изображения трехмерного шаблона объектов. Компьютерная система производит выделение слоев наблюдаемого пространства, их обработку, определение характеристик и координат цели.
При этом устройство, реализующее предложенный способ, обеспечивает достаточно высокое быстродействие и минимальное временное совпадение, т.к. можно исключить обработку тех слоев изображений, которые не содержат значимых объектов наблюдения. Быстродействие также можно повысить либо путем обработки наиболее значимых фрагментов цели (определяя, например, лишь контуры объекта, чего зачастую вполне достаточно для того, чтобы отличить один вид объекта от другого), либо за счет ограничения количества слоев изображения, выбирая их с заданным шагом. Допускается также проводить расчет корреляции слоев изображений интересуемых объектов в заранее определенной области, либо с применением методов параллельных вычислений, что также сокращает время обработки.
Реализуемость предложенного способа и устройства для его реализации определяется:
1. Возможностями предприятий промышленности по изготовлению различных технических средств для обнаружения и идентификации удаленных объектов (пленооптические камеры Lytro ILLUM, REYTRIX) [21].
2. Наличием специального программного обеспечения, реализующего различные алгоритмы формирования и обработки изображений с высокой глубиной проработки (среда программирования LabVIEW, с модулем технического зрения IMAQ Vision).
В процессе получения цифрового плоского или трехмерного шаблона объектов могут быть использованы доступные технические средства (фиг. 18). На фиг. 18 представлен макет устройства регистрации шаблона изображения пленооптической камерой, где 1 - проецирующее устройство, 2 - цифровая камера светового поля.
Использование способа и устройства для его реализации позволит повысить эффективность современных средств обнаружения и идентификации целей ОЭС в одном кадре и одной экспозиции.
В располагаемых источниках информации не обнаружено технических решений, содержащих в совокупности признаки, сходные с отличительными признаками заявляемого способа и устройства для его реализации. Следовательно, изобретение соответствует критерию изобретательский уровень.
Источники информации, принятые при составлении описания и формулы изобретения.
[1] Деготинский Н.А., Луцив В.Р. Измерение расстояния по единственному дефокусированному снимку // Научно-технический вестник информационных технологий, механики и оптики. 2016. Т. 16. №4. С. 663-669.
[2] Патент RU №20814350 G01S 17/00 от 02.04.84. Способ селекции объекта на удаленном фоне.
[3] Патент RU №23310840 G01S 17/06 от 05.10.2006. Способ обнаружения объектов.
[4] Василенко Г.И. Голографическое опознавание образов. - М.: Сов. Радио, 1977, С. 77.
[5] Шанин В.И., Шанин О.В. Методы оптической согласованной фильтрации в точном приборостроении // Журнал радиоэлектроники, №6, 2000.
[6] Методы и средства построения оптико-электронных систем наблюдения за удаленными объектами // Компоненты и технологии. 2020. №5. С. 94-99.
[7] Bok Y. Geometric Calibration of Micro-Lens-Based Light-Field Cameras using Line Features / Yunsu Bok, Hae-Gon Jeon, In So Kweon // IEEE Transactions on Pattern Analysis and Machine Intelligence v. 39, Issue: 2, 2017. P. 287-300.
[8] Ng R. Digital light field photography // A dissertation submitted to the department of computer science and the committee degree of doctor of philosophy. @ Copyright by Ren Ng, 2006. - 187 p.on graduate studies of Stanford university in partial fulfillment of the requirements for the
[9]  Computational photography of light-field camera and application to panoramic photography. Department of Software and Computer Science Education Supervisor of the master thesis: Ing. Filip Sroubek, Ph.D. Study programme: Computer Science, Software Systems Specialization: Computer Graphics, Prague, 2014 - 98 p.
Computational photography of light-field camera and application to panoramic photography. Department of Software and Computer Science Education Supervisor of the master thesis: Ing. Filip Sroubek, Ph.D. Study programme: Computer Science, Software Systems Specialization: Computer Graphics, Prague, 2014 - 98 p.
[10] Махов B.E., Потапов А.И., Закутаев А.А., Принципы работы цифровых камер ветового поля с массивом микролинз // Компоненты и технологии. 2018. №1 (226). С. 66-72.
[11] Махов В.Е., Потапов А.И., Шалдаев С.Е. Контроль геометрических параметров изделий методом светового поля // Контроль. Диагностика. 2017. №7. С. 12-24.
[12] Ольт Ю., Максаров В.В., Махов В.Е. Интеллектуальные системы оценки качества обработки резьбовых поверхностей и контроля дефектов на основе цифровой регистрации светового поля // Дефектоскопия. №11. 2020. С. 46-57.
[13] Маневич Е.Я., Махов В.Е., Потапов А.И. Мониторинг размеров и деформаций поручней эскалатора цифровыми регистраторами светового поля // Контроль. Диагностика. 2019. №2. С. 32-43.
[14] Махов В.Е., Потапов А.И. Использование вейвлет - анализа для диагностики системы технического зрения // Контроль. Диагностика. 2011. №9. С. 11-18.
[15] Вест Ч. Голографическая интерферометрия. Пер. с англ. - М.: Мир, 1982. - 504 с.
[16] Makhov V.E., Sytko I.I. Shape and Relief Evaluation Using the Light Field Camera // In the collection: IOP Conf. Series: Earth and Environmental Science. Vol. 194. 2018. - P. 022020.
[17] Махов B.E., Потапов А.И. Выделение информационных полей и дефектов поверхности методом регистрации светового поля // Контроль. Диагностика. 2018. №3. С. 28-38.
[18] Махов В.Е., Широбоков В.В., Петрушенко В.М. Методика построения алгоритмов для определения параметров малоразмерных объектов // Компоненты и технологии. 2020. №4 (226). С. 110-114.
[19] Travis J., Kring J. Lab VIEW for Everyone: Graphical Programming Made Easy and Fun, Third Edition: Prentice Hall. July 27, 2006. - 1032 p.
[20] Klinger T. Image processing with Labview and Imaq Vision (National Instruments Virtual Instrumentation Series). - Prentice Hall Professional, 2003. - 319 p.
[21] 3D Light Field Camera Technology / Raytrix GmbH, Germany, 2013, [Электронный ресурс]. URL: http://www.isolutions.com.sg/Raytrix.pdf.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АНИЗОТРОПНОЙ РЕГИСТРАЦИИ СВЕТОВОГО ПОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2790049C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ ВЫСОКОГО ПРОСТРАНСТВЕННОГО РАЗРЕШЕНИЯ ОПТИКО-ЭЛЕКТРОННЫМ СРЕДСТВОМ НАБЛЮДЕНИЯ ЗА УДАЛЕННЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2806249C1 |
| СПОСОБ ПОЛУЧЕНИЯ ЧЕТЫРЕХМЕРНЫХ ЯРКОСТНО-СПЕКТРАЛЬНЫХ ПРОФИЛЕЙ УДАЛЕННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2822085C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННОГО РАССТОЯНИЯ МЕЖДУ МАЛОРАЗМЕРНЫМИ ОБЪЕКТАМИ | 2019 |
|
RU2734070C1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ ИСКАЖЕНИЙ ВОЛНОВОГО ФРОНТА НА ОСНОВЕ СВЕТОВОГО ПОЛЯ | 2022 |
|
RU2808933C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТНОГО ПРОФИЛЯ ПОКАЗАТЕЛЯ ПРЕЛОМЛЕНИЯ ВОЗДУХА ОБЪЕМНОЙ ОБЛАСТИ ПРОСТРАНСТВА НА ОСНОВЕ АНАЛИЗА СВЕТОВОГО ПОЛЯ | 2020 |
|
RU2773390C2 |
| Способ пассивного определения дальностей до объектов с изменяемой точностью по изображениям с трех цифровых видеокамер | 2024 |
|
RU2835007C1 |
| Способ определения наличия вершины взаимодействия заряженных частиц и ее координат в объеме трекового детектора | 1986 |
|
SU1388819A1 |
| Способ автоматической сортировки продукции по морфологическим признакам | 1979 |
|
SU971520A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ДАННЫХ, ПРЕДСТАВЛЯЮЩИХ СВЕТОВОЕ ПОЛЕ | 2016 |
|
RU2734018C2 |


Использование: изобретение относится к оптическим способам обнаружения и идентификации объектов в трехмерном пространстве наблюдаемой оптико-электронной системой в одном кадре одной экспозиции, определения их координат, дальности и геометрических характеристик. Сущность: формирование корреляционного изображения морфологического попиксельного сравнения выделяемых изображений слоев наблюдаемого пространства, полученных пленооптической камерой с матричным фотоприемником с изображением двухмерного шаблона или слоем изображения трехмерного шаблона интересуемых объектов, алгоритмическое вычисление в этом изображении координат, удаленности и характеристик объектов, соответствующих их положению в трехмерном пространстве. В плоскости одного или двух фотоприемников пленооптических камер одновременно получают два изображения с находящимися в пространстве объектами и изображение двухмерного или трехмерного шаблона объектов, по степени корреляции которых определяют расстояние до наблюдаемых объектов вдоль направления оси визирования пленооптической камеры наблюдения. Устройство для реализации способа содержит пленооптическую камеру, двухмерный или трехмерный шаблон объектов в цифровом виде, осветитель шаблона, светоделительный элемент, сводящий изображение шаблона в поле зрения пленооптической камеры, и вычислительное устройство, алгоритмически формирующее изображения разноудаленных изображений слоев трехмерного наблюдаемого пространства, масштабируемые и сдвигаемые изображения шаблона объектов, морфологические попиксельные операции изображений слоев наблюдаемого пространства и слоя изображения шаблона, вычислительные алгоритмы определения координат и характеристик объектов в двухмерном изображении. Технический результат: повышение точности определения координат и характеристик объектов в наблюдаемом трехмерном пространстве с сохранением возможности поиска и распознавания всех объектов наблюдаемой области пространства в одной сцене, а также возможность определения расстояний до интересуемых объектов. 2 н.п. ф-лы, 18 ил.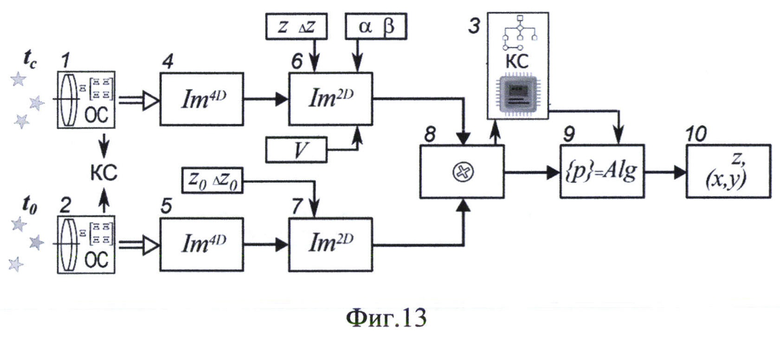
1. Способ обнаружения и определения характеристик целей на основе регистрации и обработки хода лучей от объектов в наблюдаемом пространстве, включающий в себя регистрацию изображения объема наблюдаемого пространства, алгоритмическое формирование изображений слоев пространства, обнаружение целей, алгоритмический анализ набора слоев изображений наблюдаемого пространства, вычисление линейных размеров целей и дальности до них, определение характеристик целей, отличающийся тем, что при регистрации объема наблюдаемого пространства дополнительно регистрируют двухмерный или трехмерный шаблон, при этом двухмерный шаблон формируют алгоритмически из динамической цифровой математической модели, по параметрам которой определяют динамические характеристики объектов наблюдаемой сцены, а трехмерный шаблон формируют из регистрации наблюдаемого пространства в ранний момент времени, по результатам сравнения определяют динамические характеристики целей, при алгоритмическом формировании изображений слоев пространства осуществляют формирование полного набора плоских изображений наблюдаемого пространства, соответствующих различной глубине резко отображаемого пространства, обнаружение цели осуществляют по всей глубине наблюдаемого пространства, алгоритмически синтезируемого на основе обработки массива субапертурных изображений, полученных пленооптической камерой, алгоритмический анализ полного набора слоев изображений наблюдаемого пространства производят путем анализа изображений, полученных морфологическим сравнением изображения слоев со слоем изображения шаблона с учетом возможности его масштабирования и поворота, при этом вычисления линейных размеров целей и дальностей до них осуществляют путем обработки двухмерных слоев изображения наблюдаемого пространства, имеющего наибольшую корреляцию со слоем изображения шаблона, при определении характеристик целей учитывается степень корреляции изображений слоев наблюдаемого пространства, на которых были обнаружены цели, соответствующие шаблону.
2. Устройство для обнаружения и определения характеристик целей на основе регистрации и обработки хода лучей от объектов в наблюдаемом пространстве, включающее в себя оптическую систему с пленооптической камерой регистрации изображения наблюдаемого объема пространства, отличающееся тем, что оптическую систему дополняют проецирующей системой масштабируемого и смещаемого изображения двухмерного шаблона или слоев изображения трехмерного шаблона через светоделитель, расположенный по оси расположения основной пленооптической камеры и сводящий изображение шаблона в поле зрения пленооптической камеры, или без свотоделителя перед параллельно расположенной второй пленооптической камерой, при этом компоновка всего устройства обеспечивает получение суммарного объемного изображения наблюдаемой области пространства и шаблона для определения местонахождения наблюдаемых объектов и их геометрических характеристик.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ДАННЫХ, ПРЕДСТАВЛЯЮЩИХ СВЕТОВОЕ ПОЛЕ | 2016 |
|
RU2734018C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2006 |
|
RU2331084C1 |
| US 5543917 A1, 06.08.1996 | |||
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЕННОМ ФОНЕ | 2007 |
|
RU2363018C1 |
| УСТРОЙСТВО ДЛЯ СЕЛЕКЦИИ ОБЪЕКТОВ НА НЕОДНОРОДНОМ УДАЛЕННОМ ФОНЕ | 2007 |
|
RU2390039C2 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА НА УДАЛЕННОМ ФОНЕ ОПТИЧЕСКИМИ СИСТЕМАМИ С ВОЗДУШНОГО НОСИТЕЛЯ | 2019 |
|
RU2714701C1 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА НА УДАЛЕННОМ ФОНЕ | 1984 |
|
RU2081435C1 |

