ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к судам с большим водоизмещающим корпусом и способам модульного построения судов с большим водоизмещающим корпусом.
ИЗВЕСТНЫЙ УРОВЕНЬ ТЕХНИКИ
Судно с водоизмещающим корпусом движется по воде, вытесняя ее, при этом оно спроектировано так, чтобы рассекать воду, имея ограниченную амплитуду движения. Суда с водоизмещающим корпусом, как правило, ограничены средними скоростями. Суда с большим водоизмещающим корпусом имеют форму корпуса с закругленным днищем. Большие суда, такие как нефтяные танкеры, суда для перевозки навалочных грузов, газовозы, контейнерные суда и массивные крейсеры, являются судами с водоизмещающим корпусом.
Конструкция судна с большим водоизмещающим корпусом играет большую роль относительно гидродинамических характеристик указанного судна из-за ее влияния на поведение судна при хождении по воде, принимая во внимание также увеличение скорости указанных судов. В то же время, учитывая, что они являются морскими судами дальнего плавания, перевозящими товары и/или людей на большие расстояния, они должны обладать как можно большим водоизмещением для того, чтобы достичь наилучшего отношения вытеснения/гидродинамического качества.
В судах с большим водоизмещающим корпусом средства тяги и управления расположены в нижней погруженной части корпуса. Форма кормы, обусловленная расположением средств тяги и управления, создает небольшое водоизмещение и гидродинамические ограничения, при этом необходима значительная часть длины у кормы для удержания веса двигателя, оборудования, жидкостей и т. д., так что грузоподъемность судов ограничена. Эти системы тяги и управления будут называться подкорпусными системами тяги и управления.
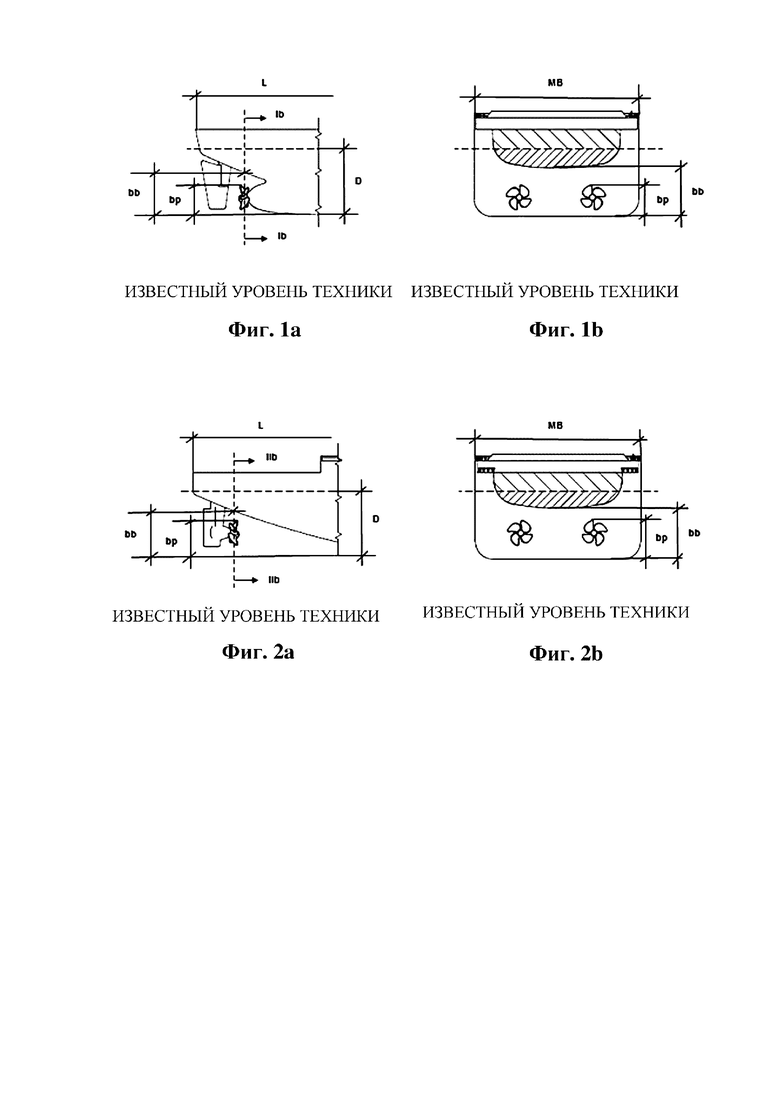
В документе US3565029A описывается первый тип судна с большим водоизмещающим корпусом. На фиг. 1a и 1b схематически показаны характерные черты таких судов. Этот тип судна содержит систему тяги и управления подкорпусного типа с двумя бульбами, объединенными с корпусом на корме судна и проходящими параллельно и симметрично диаметральной линии судна. На конце каждого бульба расположен винт, а позади каждого винта к днищу прикреплен судовой руль. Каждый винт соединен с валом, выходящим из конца бульба, при этом двигатель присоединен к винту с помощью вала, расположенного в корпусе.
В документе US2014182501A1 описан второй тип судна с большим водоизмещающим корпусом. На фиг. 2a и 2b схематически показаны характерные черты таких судов. Такое судно содержит систему тяги и управления подкорпусного типа, причем эта система тяги и управления содержит установку тяги и управления, расположенную по каждой стороне диаметральной линии судна под корпусом в погруженной части, однако корпус не содержит бульбов.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является предоставление судна и способа модульного построения судна, как описано в формуле изобретения.
Первый аспект настоящего изобретения относится к судну с большим водоизмещающим корпусом, содержащему корпус и установку тяги и управления, расположенную по каждой стороне диаметральной линии судна, при этом установки тяги и управления расположены на корме судна, причем каждая установка тяги и управления содержит средства тяги и управления, содержащие по меньшей мере один винт, при этом упор, параллельный диаметральной линии, обеспечивается средствами тяги и управления для движения судна.
Средства тяги и управления судна согласно настоящему изобретению расположены по левому и правому бортам корпуса таким образом, что ортогональная проекция указанных средств тяги и управления на плоскость воды, вместо того, чтобы находиться в пределах катящейся поверхности судна, как в случае с судами с большим водоизмещающим корпусом известного уровня техники, находится за пределами катящейся поверхности. Однако указанные средства тяги и управления остаются в пределах основной ширины, длины и осадки судна, как в известном уровне техники. Из-за этого альтернативного расположения средств тяги и управления освобождается пространство под катящейся поверхностью, при этом в судне согласно настоящему изобретению форма корпуса выполнена таким образом, что нижний предел днища корпуса в вертикальной и ортогональной плоскости относительно диаметральной линии в положении винта находится под верхним пределом указанного винта.
Поэтому в судне с большим водоизмещающим корпусом согласно настоящему изобретению корпус спроектирован в форме с полной кормой, при этом значительная польза выгодного водоизмещения достигается, поскольку нижний предел кормы судна находится под верхним пределом винтов. Таким образом, корпус судна спроектирован без ограничений, имеет скругленную форму, не имеет бульбов, винтов и судовых рулей, расположенных под катящейся поверхностью, при этом нет необходимости в том, чтобы днище корпуса постепенно поднималось по направлению к концу кормы так, чтобы поток текучей среды попадал непосредственно в винт, как в системах подкорпусного типа. Нижний предел днища не изменяется вплоть до областей возле конца кормы. По сравнению с судами с системами подкорпусного типа, водоизмещение судна увеличивается, а гидродинамическое качество не обусловлено средствами тяги и управления. Лучший компромисс водоизмещения/гидродинамического качества достигается для тех же величин длины, ширины и осадки.
Корпус судна, созданный таким способом, позволяет увеличить грузоподъемность судна, т.е. с теми же длиной, шириной и осадкой, как основными параметрами судна, что увеличивает водоизмещение указанного судна в воде, и, таким образом, увеличивает доступное грузовое пространство, улучшая отношение тоннажа грузов/основных параметров, это особенно важно в судах с большим водоизмещающим корпусом, таких как нефтяные танкеры, газовозы, суда для перевозки навалочных грузов, контейнерные суда и массивные крейсеры.
Каждая установка тяги и управления судна с большим водоизмещающим корпусом согласно настоящему изобретению дополнительно содержит опорную конструкцию, присоединенную по левому и правому бортам корпуса, поддерживающую соответствующие средства тяги и управления.
Другой аспект настоящего изобретения относится к способу модульного построения судна с большим водоизмещающим корпусом согласно первому аспекту настоящего изобретения, причем из множества модулей, соединенных вместе, один из указанных модулей представляет собой корму судна. При построении судна все элементы, как правило, размещают на верфи, а затем судно строят и собирают на той же верфи, что может привести, например, к нежелательным задержкам сроков выполнения. В способе модульного построения судна согласно настоящему изобретению судно строят из множества модулей судна, конструирующихся отдельно в разных местах (как правило, на верфях). Один из модулей согласно первому аспекту настоящего изобретения соответствует корме судна, которая отвечает условиям герметичности, устойчивости и судоходности, в отличие от характеристик кормы судов с системами тяги и управления подкорпусного типа. После того, как корму судна согласно настоящему изобретению построят, она самостоятельно плывет к определенному месту назначения, где ее присоединяют к по меньшей мере одному другому модулю судна для образования судна.
ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
На фиг. 1a показан частичный схематический вид сбоку кормы первого судна с большим водоизмещающим корпусом известного уровня техники.
На фиг. 1b показан схематический вид в разрезе вдоль линии Ib–Ib кормы по фиг. 1a.
На фиг. 2a показан частичный схематический вид сбоку кормы второго судна с большим водоизмещающим корпусом известного уровня техники.
На фиг. 2b показан схематический вид в разрезе вдоль линии IIb–IIb кормы по фиг. 2a.
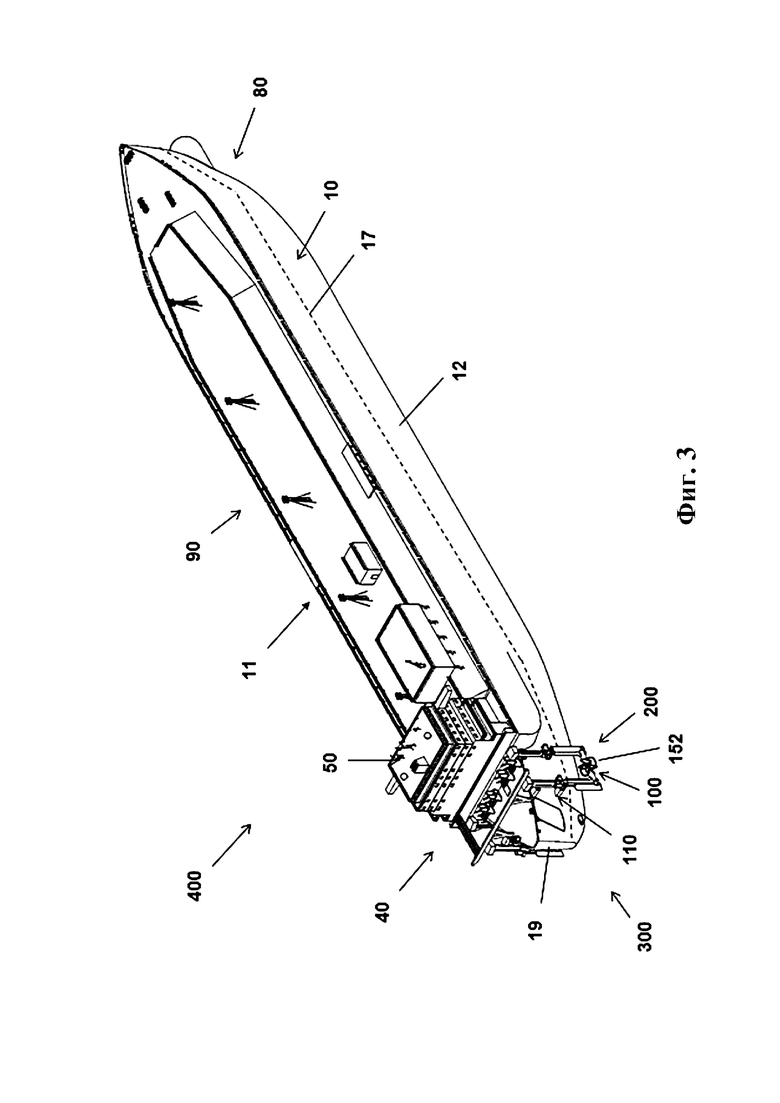
На фиг. 3 показан вид в перспективе варианта осуществления судна согласно настоящему изобретению.
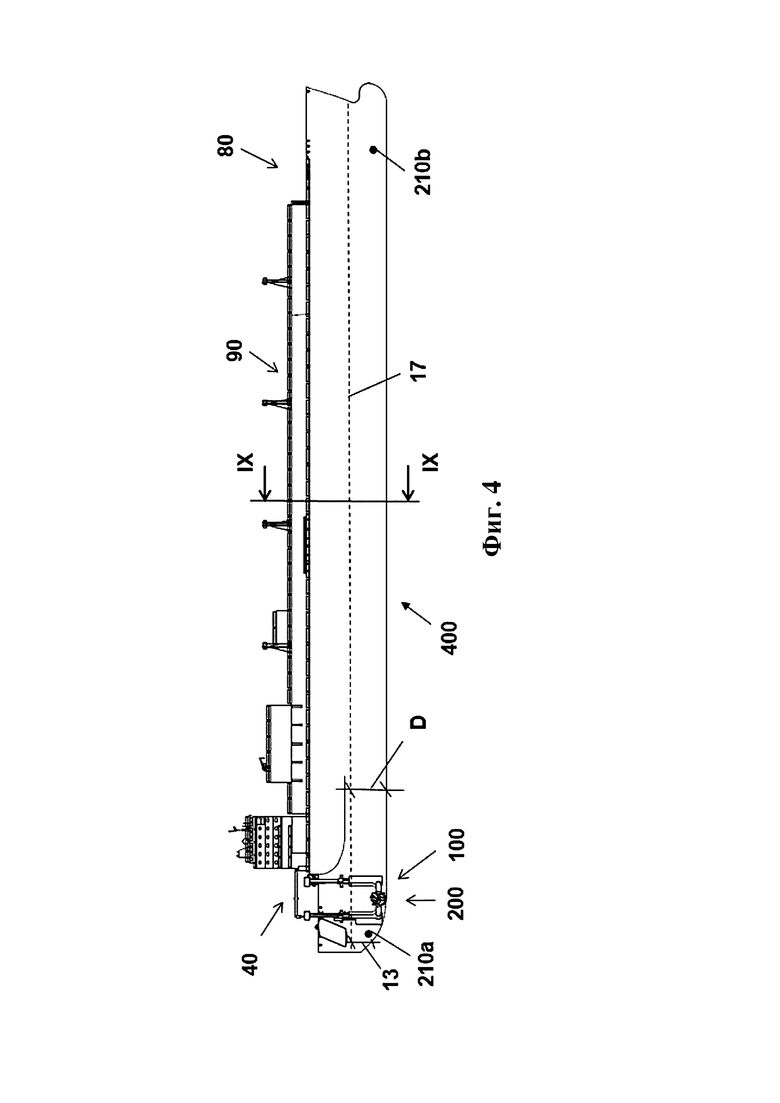
На фиг. 4 показан вид сбоку судна по фиг. 3.
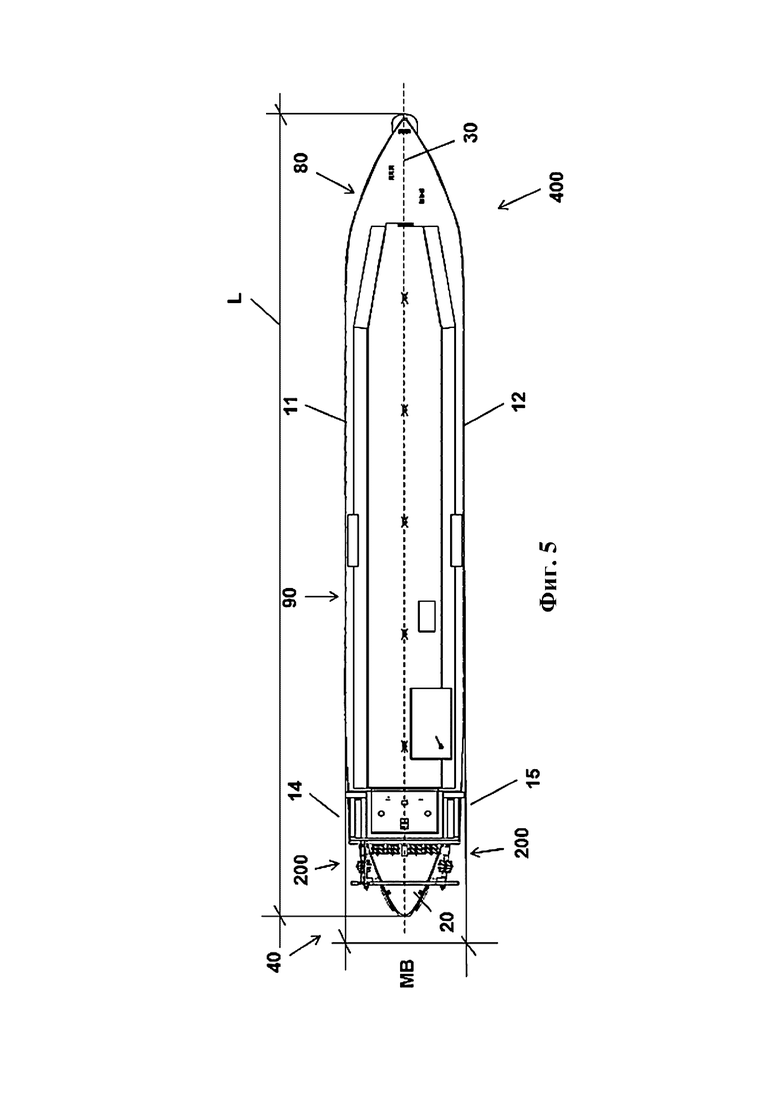
На фиг. 5 показан вид сверху судна по фиг. 3.
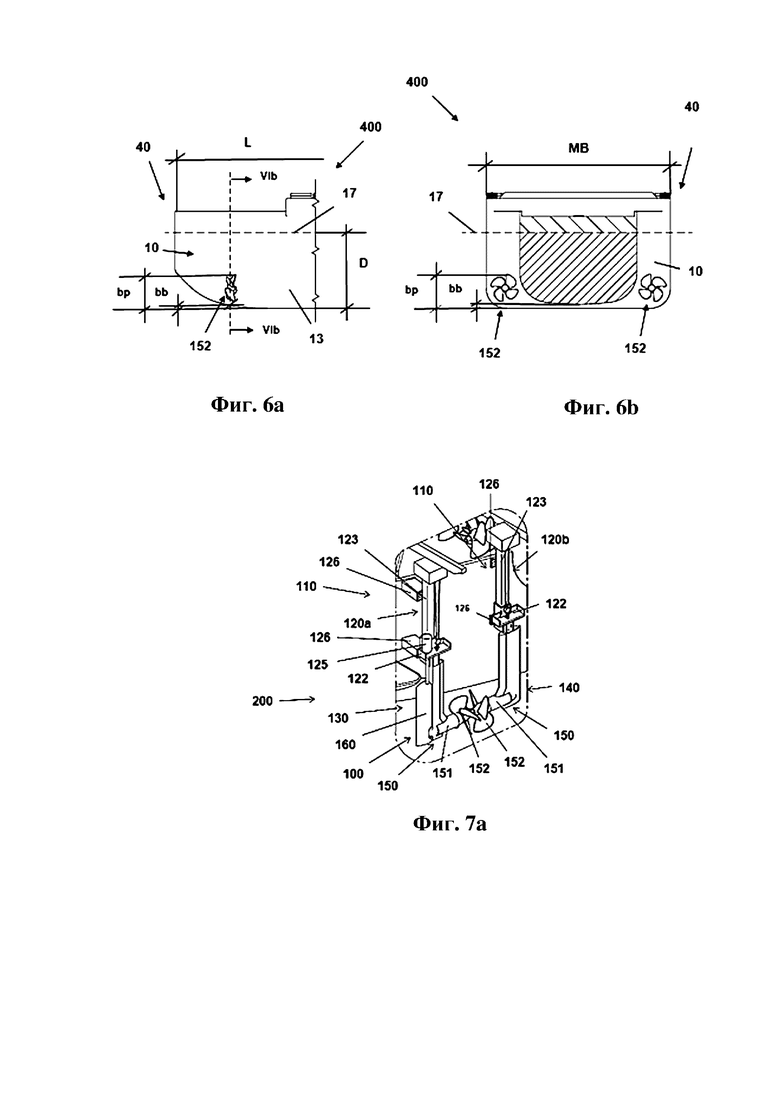
На фиг. 6a показан частичный схематический вид сбоку кормы судна по фиг. 3.
На фиг. 6b показан схематический вид в разрезе вдоль линии VIb–VIb кормы по фиг. 6a.
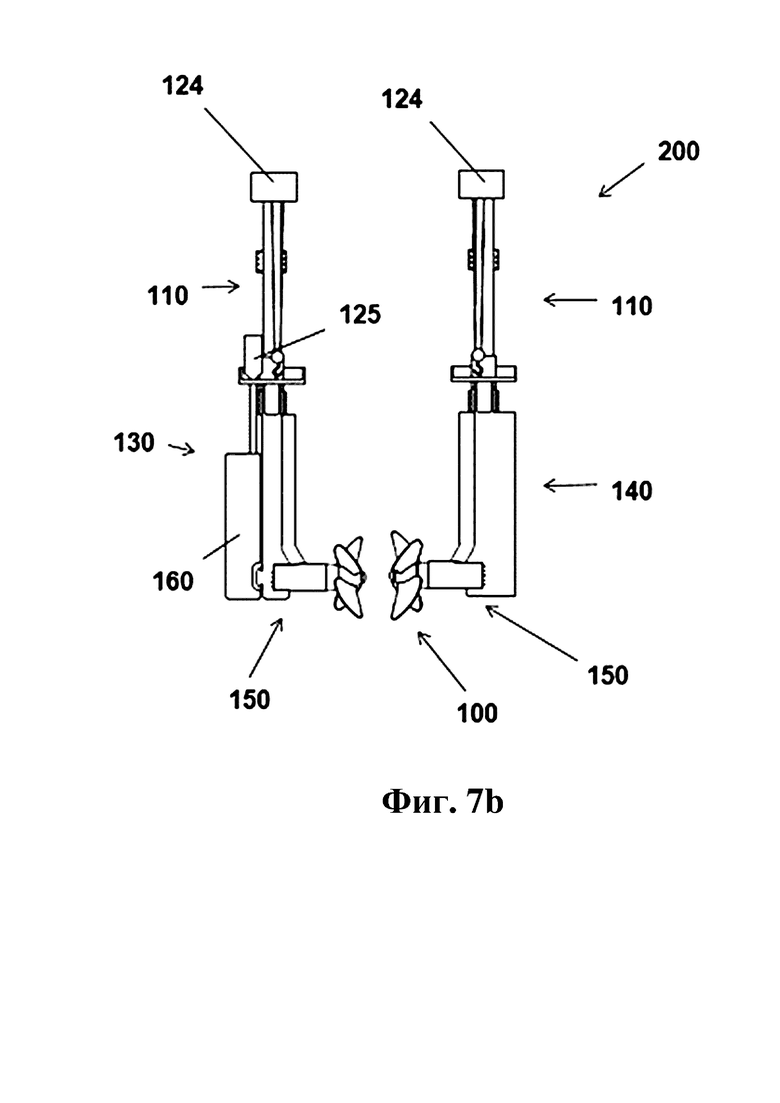
На фиг. 7a показан подробный вид в перспективе установки тяги и управления судна по фиг. 3.
На фиг. 7b показан вид сбоку установки тяги и управления по фиг. 7a.
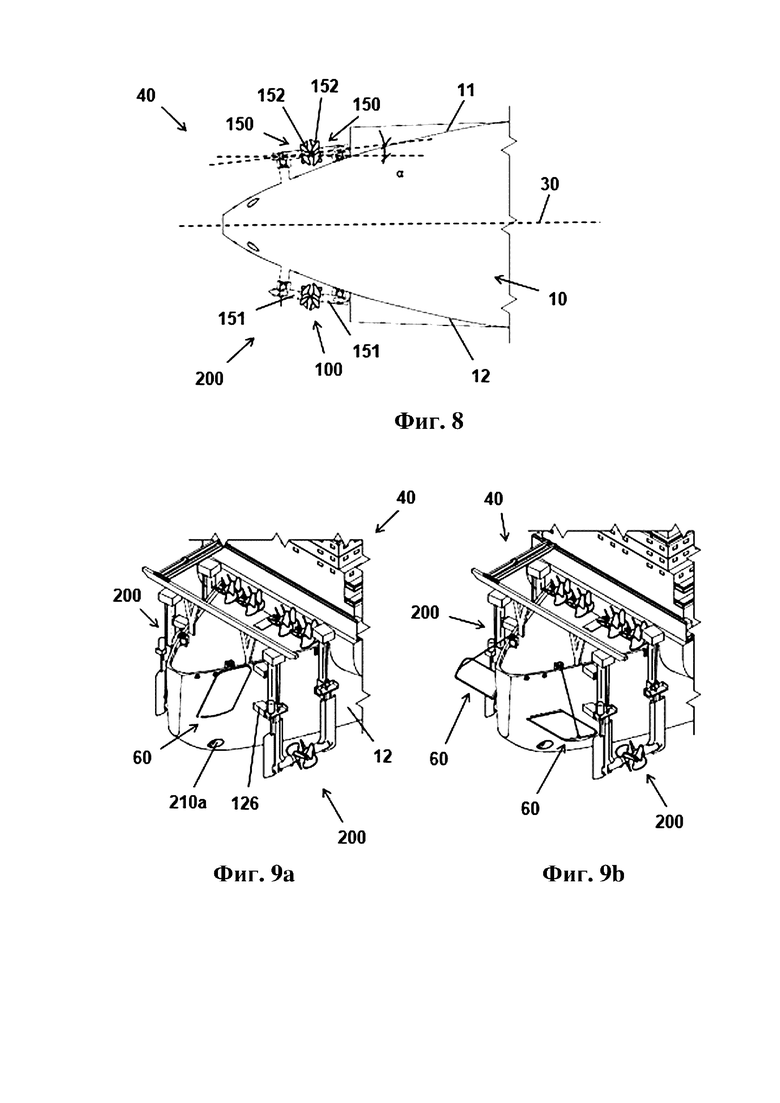
На фиг. 8 показан вид снизу кормы судна по фиг. 3.
На фиг. 9a показан подробный вид в перспективе кормы судна по фиг. 3 с убранными средствами предупреждения столкновений.
На фиг. 9b показан подробный вид в перспективе кормы судна по фиг. 3 с выпущенными средствами предупреждения столкновений.
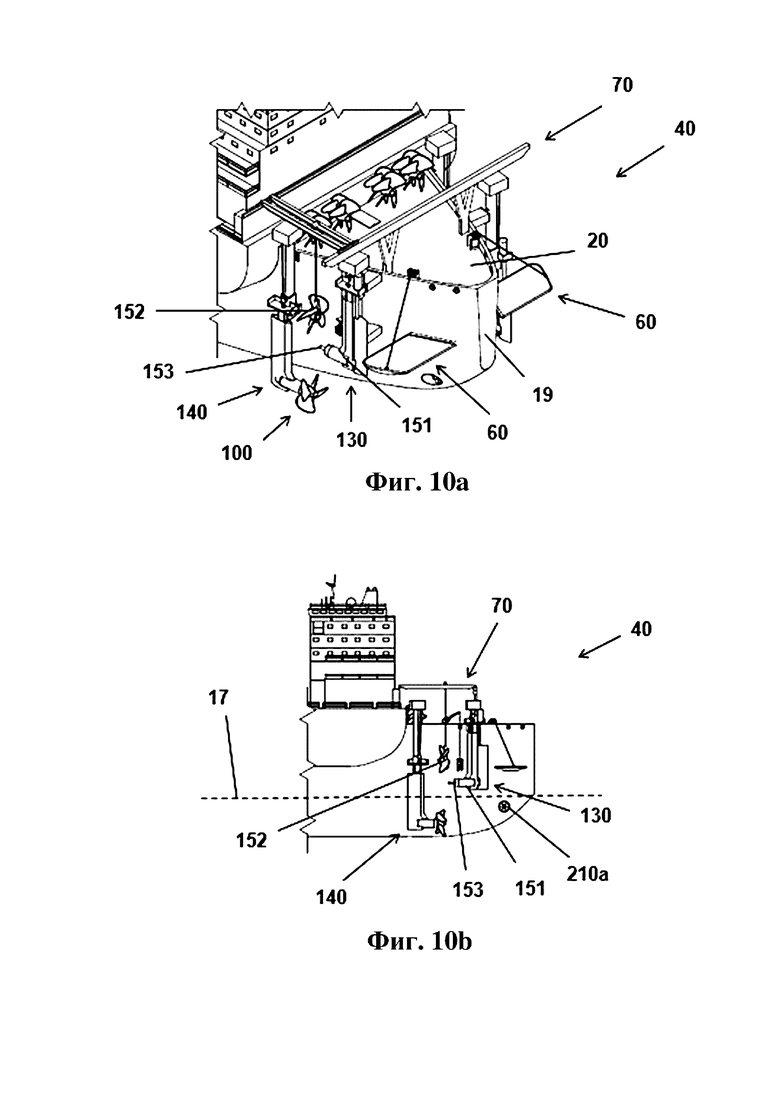
На фиг. 10a показан вид в перспективе кормы судна по фиг. 3 с выпущенными средствами предупреждения столкновений и с заменой винта средств тяги и управления.
На фиг. 10b показан вид сбоку кормы судна по фиг. 3 с выпущенными средствами предупреждения столкновений и с заменой винта средств тяги и управления.
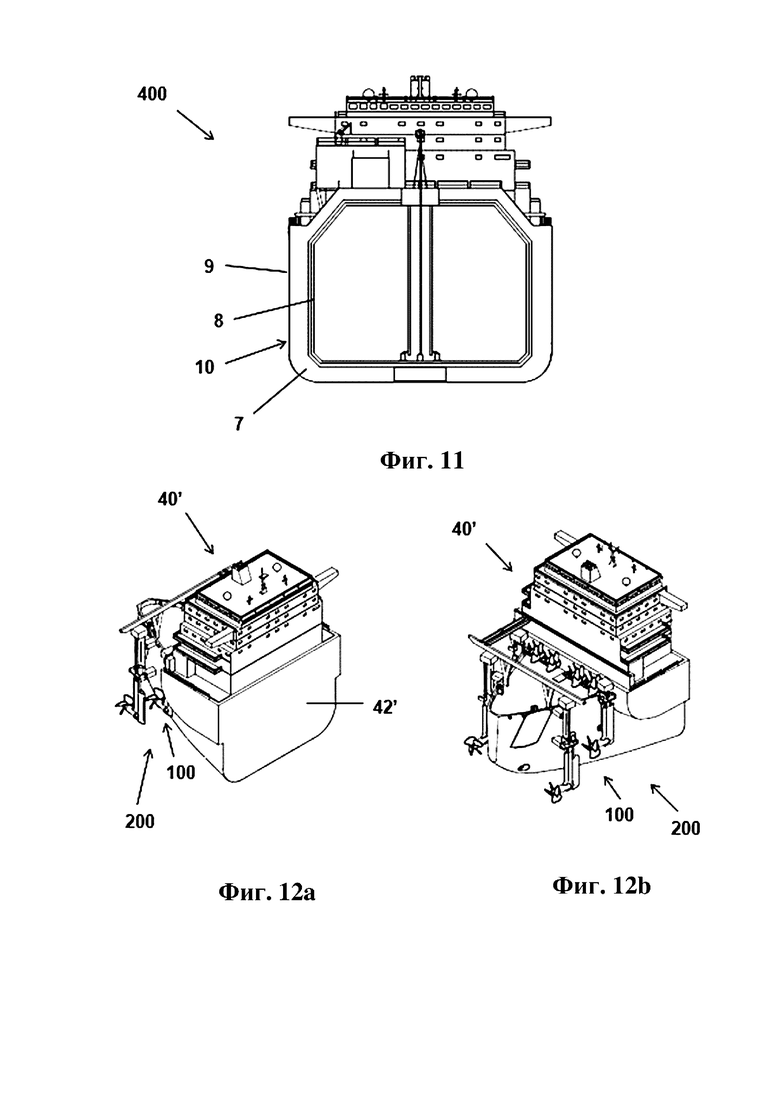
На фиг. 11 показан вид в разрезе судна по линии IX–IX по фиг. 4.
На фиг. 12a показан первый вид в перспективе кормы судна согласно настоящему изобретению, построенной с помощью модулей.
На фиг. 12b показан второй вид в перспективе кормы по фиг. 12a.
На фиг. 13-17 показаны этапы варианта осуществления способа согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Первый аспект настоящего изобретения относится к судну 400 с большим водоизмещающим корпусом. В контексте настоящего изобретения судно с водоизмещающим корпусом представляет собой судно с одним корпусом или одним мореходным каркасом. Суда с большим водоизмещающим корпусом являются, например, нефтяными танкерами, судами для перевозки навалочных грузов, газовозами, контейнерными судами и массивными крейсерами. Это может быть большим судном с длиной L, составляющей почти 300 метров, и основной шириной MB, составляющей почти 50 метров.
На фиг. 3–5 продемонстрированы соответственно вид в перспективе, вид сбоку и вид сверху варианта осуществления судна 400 с большим водоизмещающим корпусом согласно настоящему изобретению, а на фиг. 6a и 6b показаны частичный схематический вид сбоку кормы 40 судна 400 и вид в разрезе вдоль линии VIb–VIb по фиг. 6a кормы 40 судна 400, причем указанное судно 400 является грузовым судном, например, судном для перевозки сжиженных природных газов.
Судно 400 с большим водоизмещающим корпусом содержит систему 300 тяги и управления, позволяющую управление и навигацию указанного судна 400, и содержит корпус 10 и установку 200 тяги и управления, расположенную на корме 40 по каждой стороне диаметральной линии CL судна 400. Корпус 10, как показано на фиг. 5, является наружной обшивкой или покрытием судна 400, образующими его каркас. Диаметральная линия CL, как показано на фиг. 5, представляет собой воображаемую линию, которая, проходя от носа 80 к корме 40 судна 400, разделяет его на две равные половины. Каждая установка 200 тяги и управления содержит средства 100 тяги и управления, содержащие по меньшей мере один винт 152, при этом упор, параллельный диаметральной линии CL, обеспечивается средствами 100 тяги и управления для движения судна 400.
Как показано на фиг. 5, средства 100 тяги и управления расположены по левому борту 11 и правому борту 12 корпуса 10 таким образом, что ортогональная проекция указанных средств 100 тяги и управления на плоскость воды, вместо того, чтобы находиться в пределах катящейся поверхности судна 400, как в случае с судами с большим водоизмещающим корпусом известного уровня техники, когда они имеют максимальную осадку по условиям прочности, находится за пределами катящейся поверхности. Катящаяся поверхность представляет собой поверхность, определенную пересечением плоскости воды, в которой находится судно, и самого корпуса судна. Максимальная осадка по условиям прочности является максимальной осадкой, для которой создано судно.
В любом случае, как показано на фиг. 5, указанные средства 100 тяги и управления остаются в пределах основной ширины MB и длины L. Ширина представляет собой поперечный размер судна 400 от левого борта 11 до правого борта 12, при этом основная ширина MB является наибольшей шириной судна 400. Длина L является размером судна 400, взятым по его длине от носа 80 к корме 40. Дополнительно, как показано на фиг. 6a, средства 100 тяги и управления также сохраняются в пределах осадки D судна 400. Осадка D является расстоянием по вертикали между точкой ватерлинии 17 и килем судна 400.
С другой стороны, как показано на фиг. 6a, форма корпуса 10 выполнена таким образом, что нижний предел bb днища 13 корпуса 10 в вертикальной и перпендикулярной плоскости диаметральной линии CL в положении винта 152 находится ниже верхнего предела bp указанного винта 152. Днище 13 является наружной поверхностью корпуса 10. Ссылаясь на положение винта 152 в контексте настоящего изобретения, с логической точки зрения ссылка сделана на рабочее положение указанного винта 152, так как существует возможность, что указанный винт 152 может быть передвинут в вертикальном направлении в нерабочее положение, например, для его чистки, починки или технического обслуживания.
Сравнивая фиг. 6a–6b с фиг. 1a–1b и фиг. 2a–2b, на которых показана корма судов с большим водоизмещающим корпусом предшествующего уровня техники, подтверждается, что корпус 10 судна 400 согласно настоящему изобретению на корме 40 имеет значительно большую вместимость, чем корпуса судов предшествующего уровня техники. Станет очевидно, что в судах, схематически показанных на фиг. 1a–1b и 2a–2b, днище корпуса постепенно поднимается по направлению к концу кормы, причем днище корпуса в отношении длины винтов находится над указанными винтами. Таким образом, нижний предел bb днища корпуса указанных судов в вертикальной и перпендикулярной плоскости относительно диаметральной линии в положении винта находится ниже верхнего предела bp указанного винта.
Эта конфигурация корпуса 10 обеспечивает значительный прирост полезного водоизмещения судна 400 за счет использования преимущества пространства на всех существующих судах с большим водоизмещающим корпусом предыдущего уровня техники с такими же длиной, шириной и осадкой, как у судна 400 согласно настоящему изобретению, причем пространство занято установкой тяги и управления, а именно бульбами, и/или винтами, и/или двигателями, и/или судовыми рулями.
В дополнение к увеличению вместимости корпуса 10 судна 400 согласно настоящему изобретению относительно судов предыдущего уровня техники, другое преимущество судна 400 согласно настоящему изобретению заключается в том, что поток текучей среды, т. е., поток воды, проходящий через корпус судна, горизонтально входит в винты 152. В отличие от этого, в судах предыдущего уровня техники, как видно по фиг. 1a и 2a, поток текучей среды входит в винты от днища корпуса в направлении вверх к концу кормы. Это делает движение судна 400 согласно настоящему изобретению более эффективным.
С другой стороны, из-за того, что средства 100 тяги и управления, хоть они и расположены так, что ортогональная проекция указанных средств 100 тяги и управления на плоскость воды находится снаружи указанной катящейся поверхности, остаются в пределах основной ширины MB, указанные средства 100 движения и рулевого управления защищены сбоку.
Каждая установка 200 тяги и управления судна 400 содержит, согласно вариантам осуществления, показанным на фигурах, опорную конструкцию 110, поддерживающую соответствующие средства 100 тяги и управления, причем каждая опорная конструкция 110 присоединена к каждой из сторон судна 400 по левому борту 11 и правому борту 12. Корпус 10, как правило, является гладким, однако, в частях, где присоединены опорные конструкции 110, на указанном корпусе 10 могут быть образованы выступы или выпуклости 126. Опорные конструкции 110 в этом варианте осуществления судна 400 расположены на ватерлинии 17 судна 400. Ватерлиния 17 представляет собой воображаемую линию, обозначающую пересечение плоскости поверхности воды и корпуса 10; ватерлиния 17 является переменной, так как она изменяется в соответствии с состоянием груза судна 400.
На фиг. 7a показан подробный вид в перспективе установки 200 тяги и управления судна 400 по фиг. 3–5, а на фиг. 7b показан вид сбоку установки 200 тяги и управления по фиг. 7a.
Средства 100 тяги и управления в этом варианте осуществления судна 400 содержат устройство 100 тяги и управления с гребным комплексом 150 и судовым рулем 160, при этом устройство 140 тяги содержит гребной комплекс 150. В дополнение, каждая опорная конструкция 110 имеет первую конструкцию 120a, поддерживающую устройство 100 тяги и управления, и вторую конструкцию 120b, поддерживающую устройство 140 тяги. Как первая конструкция 120a, так и вторая конструкция 120b каждой установки 200 тяги и управления присоединены к каждому из левого и правого бортов 11, 12 с помощью металлических пластин и крепежных средств, таких как шурупы, болты, заклепки и т. д., или других средств, известных в существующем уровне техники, на выступах или выпуклостях 126 корпуса 10.
Указанные первая конструкция 120a и вторая конструкция 120b каждой опорной конструкции 110 в этом варианте осуществления судна 400 расположены над ватерлинией 17 судна 400, однако в других вариантах осуществления, не показанных в графических материалах, они могут частично находиться под ватерлинией 17, но никогда не полностью под указанной ватерлинией 17. Каждый судовой руль 160 в этом варианте осуществления судна 400 содержит электродвигатель 125, который обеспечивает движение и, таким образом, управление указанным судном 400.
Первая конструкция 120a и вторая конструкция 120b каждой опорной конструкции 110 в этом варианте осуществления судна 400 расположены на корме 40, а точнее, на каждой из раковин, т. е. на левой раковине 14 и правой раковине 15.
В предпочтительном варианте осуществления конструкция корпуса 10 судна 400 выполнена таким образом, что ширина начинает уменьшаться с гидродинамическим критерием от расстояния до конца 19 кормы 40, составляющего приблизительно 35% или меньше, чем длина L судна 400. Таким образом достигаются хорошие гидродинамические характеристики корпуса 10.
В предпочтительном варианте осуществления конструкция корпуса 10 судна 400, выполнена таким образом, что днище 13 судна 400 в центре длины L сохраняется в соответствии с расстоянием 19 кормы 40 равным 10% или меньше общей длины L судна 400, что позволяет достичь значительного увеличения вместимости корпуса 10 относительно судов предыдущего уровня техники. Другими словами, в судне, имеющем длину 280 метров, например, в судне 400 этого предпочтительного варианта осуществления, днище 13 начинает снижаться на расстоянии 30 метров от конца кормы 40, вместо более 100 метров, как могло произойти в случае похожего судна с подкорпусной системой тяги и управления.
Таким образом, корпус 10 судна 400 выполнен с постепенным снижением ширины в направлении кормы 40, начиная от положения, которое ближе к транцу судна 400, причем снижение днища 13, которое происходит ближе к корме 40, и соответствующая система 300 тяги и управления, расположенная по левому борту 11 и правому борту 12 судна 400, позволяют увеличивать вместимость судна. Таким образом, это увеличивает вместимость корпуса 10 указанного судна 400, а также его грузоподъемность в диапазоне, составляющем от 5% до 15%, относительно других судов с подкорпусными системами тяги и управления. Таким образом улучшается отношение тоннажа грузов/основных параметров судна 400, что играет большую роль для судов с большим водоизмещающим корпусом, таких как, например, нефтяные танкеры, газовозы, суда для перевозки навалочных грузов и контейнерные суда.
На фиг. 8 показан вид снизу кормы 40 судна 400 по фиг. 3, а на фиг. 9a и 9b показаны вид в перспективе и вид сбоку кормы 40 судна 400 по фиг. 3 с выпущенными средствами 60 предупреждения столкновений и с заменой винта 152 средств 100 тяги и управления.
Каждый гребной комплекс 150 каждого устройства 130 тяги и управления и каждое устройство 140 тяги, содержащееся в средствах 100 тяги и управления, в этом варианте осуществления судна 400 содержит погружной электродвигатель 151 и винт 152, причем указанные винты 152 присоединены к выходному валу 153 каждого соответствующего двигателя 151. Винт 152 гребного комплекса 150 устройства 130 тяги и управления и винт 152 гребного комплекса 150 устройства 140 тяги расположены вдоль одной и той же воображаемой оси в качестве удлиненной части выходных валов 153 соответствующего двигателя 151, при этом оба винта 152 вращаются в противоположных направлениях, образуя соосные винты противоположного вращения. Соосные винты противоположного вращения представляют собой широко известные в предыдущем уровне техники винты, которые позволяют иметь меньшие винты для достижения скорости выхода струи текучей среды, параллельной скорости входа, таким образом снижая необходимую поглощенную энергию относительно энергии, поглощенной одним винтом для достижения того же упора. Также возможно расположить два винта 152 на одном выходном вале 153 двигателя 151, которые вращаются в противоположных направлениях и образуют соосные винты противоположного вращения (не показаны в графических материалах).
Выходной вал 153 двигателя 151 каждого гребного комплекса 150 расположен в горизонтальной плоскости, когда судно 400 балансируется или уравновешивается на тихой воде, т. е. расположено параллельно горизонтальной плоскости, проходящей через ватерлинию 17 указанного судна 400, так как поток текучей среды также следует по горизонтальному пути относительно указанной плоскости. Однако в судах с подкорпусными системами тяги и управления поток текучей среды следует по восходящей траектории для точного вхождения в винты, при этом допустим наклон винтов в вертикальной плоскости для их расположения параллельно потоку текучей среды для оптимизации, помимо прочего, эффективности тяги.
Выходной вал 153 двигателя 151 каждого гребного комплекса 150 в предпочтительном варианте осуществления расположен в вертикальной плоскости, образуя постоянный угол α, равный 8º или меньше, относительно вертикальной плоскости, проходящей через диаметральную линию CL. Угол α может меняться от одного судна к другому с описанными выше характеристиками в зависимости от размеров указанного судна, в основном его длины и ширины. В предпочтительном варианте осуществления судна 400 ширина постепенно уменьшается в размерах, описанных выше, причем левый борт 11 и правый борт 12 судна 400 наклонены таким образом, что поток воды, проходящий по указанным левому борту 11 и правому борту 12, направлен на средства 100 тяги и управления, непосредственно сталкиваясь с винтами 152, что улучшает гидродинамические характеристики относительно судов с подкорпусными системами тяги и управления.
Из-за этого расположения выходных валов 153 двигателя 151 гребных комплексов 150 относительно их как горизонтального положения, так и углового положения по отношению к диаметральной линии CL судна 400, упор или толчок, параллельный диаметральной линии CL, достигается для создания тяги судна 400.
В этом варианте осуществления судна 400 средства 100 тяги и управления могут двигаться по высоте вдоль опорной конструкции 110, соответствующей каждой установке 200 тяги и управления. Таким образом, если средства 100 тяги и управления двигаются, пока они находятся вне воды, так как каждая установка 200 тяги и управления дополнительно по меньшей мере частично доступна с каждой стороны судна 400 над ватерлинией 17, это обеспечивает выполнение определенных норм по чистке, техническому обслуживанию и даже замене и модификации соответствующих средств 100 тяги и управления без необходимости погружения судна в воду или его введения в сухой док. Как первая конструкция 120a, так и вторая конструкция 120b содержат направляющий элемент 123, который в этом варианте осуществления судна 400 является вертикально расположенной колонной. Два гребных комплекса 150 и судовой руль 160 средств 100 тяги и управления соединены с соответствующими опорами 122, представляющими собой металлические конструкции, которые могут двигаться вдоль соответствующего направляющего элемента 123 и которые могут быть соединены с конструкцией 110 с помощью штифтов или любых других крепежных средств. В других вариантах осуществления судна 400, не показанных в графических материалах, опоры 122 представляют собой перфорированные пластины, которые могут двигаться вдоль направляющих элементов 123 и присоединены с помощью обычных крепежных средств, таких как шурупы.
Гребные комплексы 150 и судовые рули 160 могут быть отрегулированы по высоте с помощью направляющих элементов 123 и могут быть расположены над ватерлинией 17 судна 400. В этом варианте осуществления судна 400 первая конструкция 120a и вторая конструкция 120b расположены полностью над ватерлинией 17 и в своей верхней части содержат электроприводные средства 124, присоединенные к опорам 122 с помощью средств крепления, таких как канаты, цепи или рейки. Таким образом, когда это необходимо, электроприводные средства 124 обеспечивают движение каждого гребного комплекса 150 и каждого судового руля 160 вдоль направляющего элемента 123, что позволяет расположить их на разной высоте.
Эта конфигурация установок 200 тяги и управления обеспечивает расположение гребных комплексов 150 и соответствующих судовых рулей 160 в более чем одном рабочем положении, вдоль соответствующей опорной конструкции 110, причем рабочими положениями являются все положения, в которых они толкают судно 400. Поэтому, например, когда судно 400 перевозит свой груз, корпус 10 более погружен, а оба гребных комплекса 150 и судовые рули 160 расположены на высоте, подходящей для тяги указанного судна 400 с наибольшей эффективностью при использовании потока текучей среды. Однако когда судно 400 изменяет свой груз, изменяется осадка D судна 400, причем оба гребных комплекса 150 и судовые рули 160 могут быть расположены на высоте, подходящей для движения указанного судна 400 с наибольшей эффективностью при использовании потока текучей среды. Расположение и доступность средств 100 тяги и управления обеспечивают установку винтов 152, имеющих конструкцию, которая является оптимальной для состояния груза судна 400.
Исключительным будет случай, когда судно 400 передвигается без груза. В судах с подкорпусными системами тяги и управления корма имеет меньшую плавучесть, так как она обладает меньшим водоизмещением, при этом судно без груза будет иметь склонность наклоняться к корме. Для уравновешивания или балансировки, суда без груза с подкорпусными системами тяги и управления имеют пространства внутри корпуса, которые полностью или частично заполняются водяным балластом, таким образом они погружают корпус в носовой части для достижения указанного равновесия или баланса и для возможности плыть. В судне 400 согласно настоящему изобретению это не является обязательным условием, так как судно уравновешивается минимальным балластом вследствие существенного водоизмещения на корме 40. Система 300 тяги и управления может быть присоединена на необходимой высоте, так как гребные комплексы 150 и судовые рули 160 могут быть отрегулированы по высоте и могут взаимодействовать с винтами 152, имеющими конструкцию, которая подходит для уровня погрузки судна 400.
Необходимость небольшого количества водяного балласта позволяет снижение выгрузки указанного балласта в месте, где сжиженный газ загружается на судно 400, что обеспечивает соответствие международным медико-санитарным правилам относительно выгрузки водяного балласта.
Дополнительно, осадка D кормы 40 судна 400 меньше осадки кормы судна с подкорпусной системой тяги и управления, что обеспечивает возможность увеличения скорости судна 400, так как вхождение корпуса 10 в воду обеспечивает меньше сопротивления и улучшает его при движении вперед. Улучшение может равняться по меньшей мере увеличению скорости на 2% относительно судов с подкорпусной системой тяги и управления. Когда судно 400 плывет с обычной скоростью, снижение потребления топлива при хождении без груза может составлять по меньшей мере 5%.
Судно 400 с характеристиками, описанными выше, может плыть без использования судовых рулей 160. Это происходит из-за того, что, учитывая характеристики асимметрии и расположения средств 100 тяги и управления по левому борту 11 и правому борту 12 судна 400, двигатели 151 гребных комплексов 150 могут получить независимые заданные скорости, что позволяет повлиять на управление судном 400, заменяя судовые рули 160. Когда судно 400 плывет с крейсерской скоростью, принимая во внимание большой моментный рычаг указанного судна 400 вследствие расположения средств 100 тяги и управления относительно диаметральной линии CL, за счет независимого присваивания, когда необходимо, разных скоростей двигателям 151 гребных комплексов 150, расположенных как по левому борту 11, так и по правому борту 12, судном 400 можно управлять без использования судовых рулей 160. Таким образом, в других вариантах осуществления судно 400 может обойтись без судовых рулей 160 и может управляться самими гребными комплексами 150, как описано выше. Хотя указанного способа управления судна 400 может быть достаточно даже при низких скоростях во время выполнения маневров в порту, учитывая значительную длину указанного судна 400, боковые пропульсивные системы 210a, 210b дополнительно могут быть расположены как на корме 40, так и на носу 80 соответственно, обеспечивая боковой упор судна 400 относительно диаметральной линии CL и способствуя маневренности указанного судна 400.
На фиг. 9a показан подробный вид в перспективе кормы 40 судна 400 по фиг. 3 с убранными средствами 60 предупреждения столкновений, а на фиг. 9b показан подробный вид в перспективе кормы 40 судна 400 по фиг. 3 с выпущенными средствами 60 предупреждения столкновений. Эти убираемые средства 60 предупреждения столкновений расположены по левому борту 11 и правому борту 12 в кормовой части 40 и защищают установки 200 тяги и управления от ударов. Во время маневров по возвращению в порт и плавания судна 400, несмотря на то, что установки 200 тяги и управления расположены на левой раковине 14 и правой раковине 15 судна 400 и не превышают основной ширины MB судна 400, существует определенный уровень риска, что по меньшей мере винты 152 могут врезаться в стену порта. С этой целью средства 60 предупреждения столкновений, которые убираются, когда судно 400 плывет, могут выпускаться, когда судно 400 выполняет маневры, таким образом, если произойдет удар о стену порта, этот удар будет поглощен средствами 60 предупреждения столкновений.
Судно 400 в предпочтительном варианте осуществления содержит подъемные средства 70, расположенные на главной палубе 20 в кормовой части 40 рядом со средствами 100 тяги и управления судна 400, как показано на фиг. 10a и 10b. Эти подъемные средства 70 представляют собой козловой кран, но также могут представлять собой поворотные краны или краны, расположенные на указанной главной палубе 20. Для оптимизации эффективности тяги винты 152 можно заменить, чтобы приспособить их к другим режимам эксплуатации судна 400. Более того, из-за технического обслуживания или чистки необходимо периодически или в момент, когда возникают проблемы, заменять любой из винтов 152 или любой из двигателей 151, или даже внедрять или заменять любой из судовых рулей 160. Подъемные средства 70 также обеспечивают спуск и подъем людей и/или оборудования по левому борту 11 и правому борту 12 для выполнения технического обслуживания и чистки системы 300 тяги и управления.
На фиг. 11 показан вид в разрезе судна 400 по линии IX–IX по фиг. 4. Судно 400 является газовозом, т. е. судном, перевозящим газ, и по сути оно перевозит сжиженный газ, имеющий температуру -162 ºC. Цистерны для газа герметичны, однако, несмотря на это, газ внутри цистерн нагревается и испаряется. В настоящее время в судах, перевозящих газ, этот испаряющийся газ выжигается или используется в качестве топлива для питания двигателей самого судна. Несмотря на это, в таких случаях, как причаливание в порт для обслуживания или из-за неисправности, газ продолжает испаряться, но не используется двигателями. В указанных случаях было бы полезно сохранить указанный газ, а затем использовать его в качестве топлива. Корпус 10 судна 400 является двойным корпусом, имеющим наружный первый корпус 9, который соприкасается с водой, и внутренний второй корпус 8 внутри первого корпуса 9. Закрытое пространство 7 образовано между первым корпусом 9 и вторым корпусом 8, при этом указанное пространство 7 может быть использовано. В других судах это закрытое пространство 7 используется для накопления водяного балласта для возвращения без груза. В судне 400 согласно настоящему изобретению водяного балласта значительно меньше, поэтому часть этого закрытого пространства 7 может быть использована для хранения испаренного газа под низким давлением в 10 атмосфер, например, который в дальнейшем будет использован в качестве топлива для судна 400 или так, как будет необходимо.
Второй аспект настоящего изобретения относится к способу модульного построения судна 400’.
На фиг. 12a показан первый вид в перспективе кормы 40’ судна 400’ согласно настоящему изобретению, построенного с помощью модулей, а на фиг. 12b показан второй вид в перспективе кормы 40’ по фиг. 12a. Указанная корма 40’ может содержать систему 300 тяги и управления, такую, как описана для судна 400 в любом из его вариантов осуществления, и может являться частью судна 400’, которое построено с помощью модулей, причем указанная корма 40’ является одним из модулей, в частности, корма указанного судна 400’. Указанная корма 40’ может самостоятельно плыть с помощью средств 100 тяги и управления к определенному месту назначения. На самом деле, указанная корма 40’ имеет распределение веса и упора таким образом, что она является устойчивой и может плыть самостоятельно, в отличие от кормы судна с системой тяги и управления подкорпусного типа.
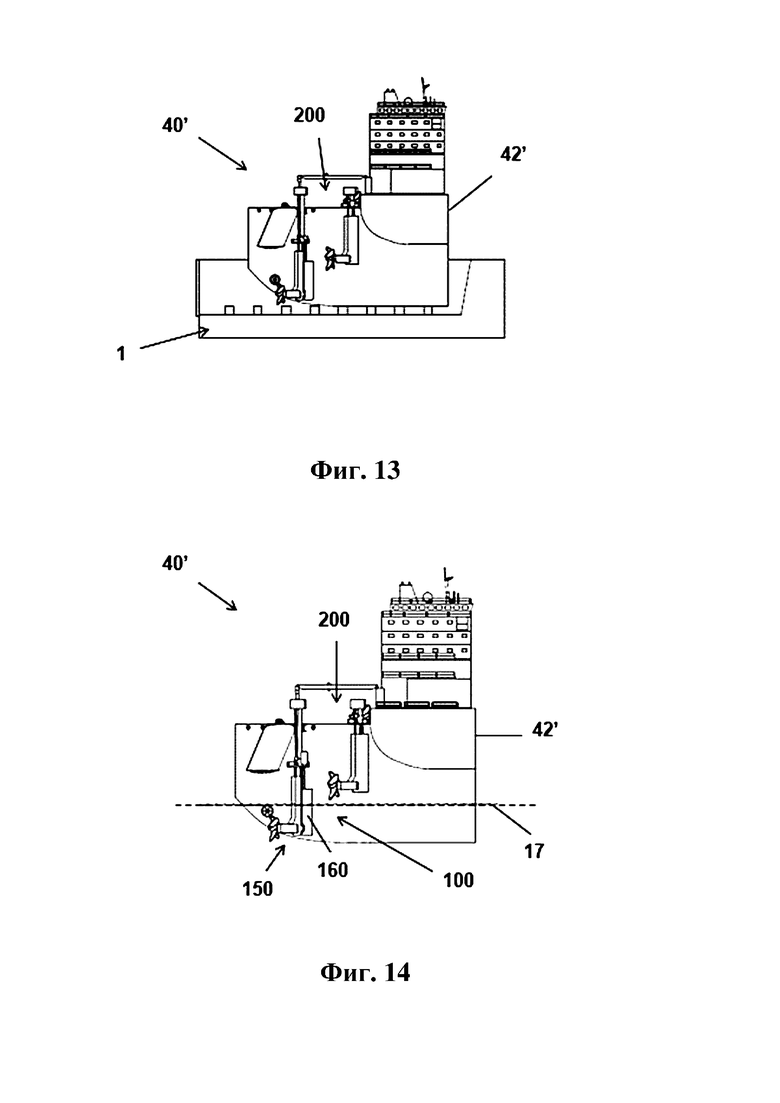
На фиг. 13–17 показаны этапы варианта осуществления способа построения судна 400’ согласно настоящему изобретению. Указанное судно 400’ в этом варианте осуществления построено из модуля, представляющего собой корму 40’, модуля, представляющего собой нос 500’, и модуля, представляющего собой центральную часть 600’, на которой хранится большая часть груза для перевозки, а также всех элементов, описанных для судна 400, описанного выше.
Способ модульного построения судна 400’ согласно настоящему изобретению в этом варианте осуществления включает:
- этап построения для построения кормы 40’ судна 400’,
- этап навигационного перемещения, на котором корма 40’ судна 400’ самостоятельно плывет с помощью средств 100 тяги и управления ко второй верфи, и
- этап соединения, на котором на указанной второй верфи указанную корму 40’ судна 400’ присоединяют к носу 500’ и центральной части 600’, создавая судно 400’.
Перед этапом навигационного перемещения способ дополнительно включает этап подготовки, на котором конструируют один герметичный конец 42’ кормы 40’, при этом на этапе построения внедряют навигационную систему и систему производства электроэнергии, как показано на фиг. 12a, к указанной корме 40’ дополнительно добавляют крепежные элементы, цистерну для топлива и навигационные огни. Это позволяет получить корму 40’, которая может самостоятельно плыть ко второй верфи без буксировки или перевозки другими способами на этапе навигационного перемещения.
Установки 200 тяги и управления кормы 40’ присоединяют на этапе построения таким образом, что средства 100 тяги и управления устанавливают по левому борту 11 и правому борту 12, толкая корму 40’ на этапе навигационного перемещения, причем, учитывая их расположение и направление упора, конец 42’ кормы 40’ выступает в качестве кормы указанной кормы 40’ во время указанного плавания.
После этапа навигационного перемещения расположение средств 100 тяги и управления, расположенных на корме 40' на этапе построения, изменяют, располагая их таким образом, что, когда судно 400’ построено, указанные средства 100 тяги и управления толкают указанное судно 400’, заставляя корму 40’ выступать в качестве кормы судна 400’. Поэтому, после того, как модульное судно 400’ закончено, средства 100 тяги и управления создают упор модульного судна 400’ в направлении продвижения, противоположном направлению упора, в котором указанные средства 100 тяги и управления толкают корму 40’ во время этапа навигационного перемещения способа.
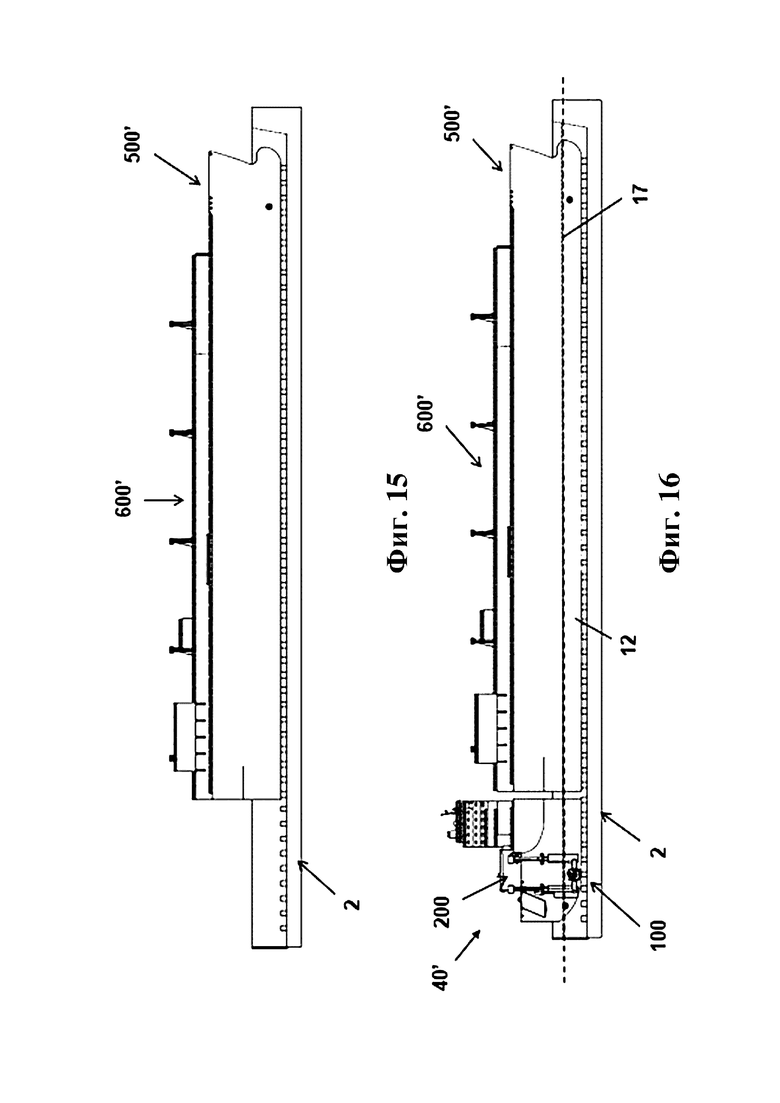
В этом варианте осуществления способа модульного построения судна 400’ на этапе соединения новый модуль, образуемый носом 500’ и центральной частью 600’, строят в доке 2 второго места назначения, как показано на фиг. 15. В других вариантах осуществления способа центральная часть 600’ содержит несколько модулей, при этом указанные модули строят на одной или нескольких верфях, причем образуют один или несколько новых модулей.
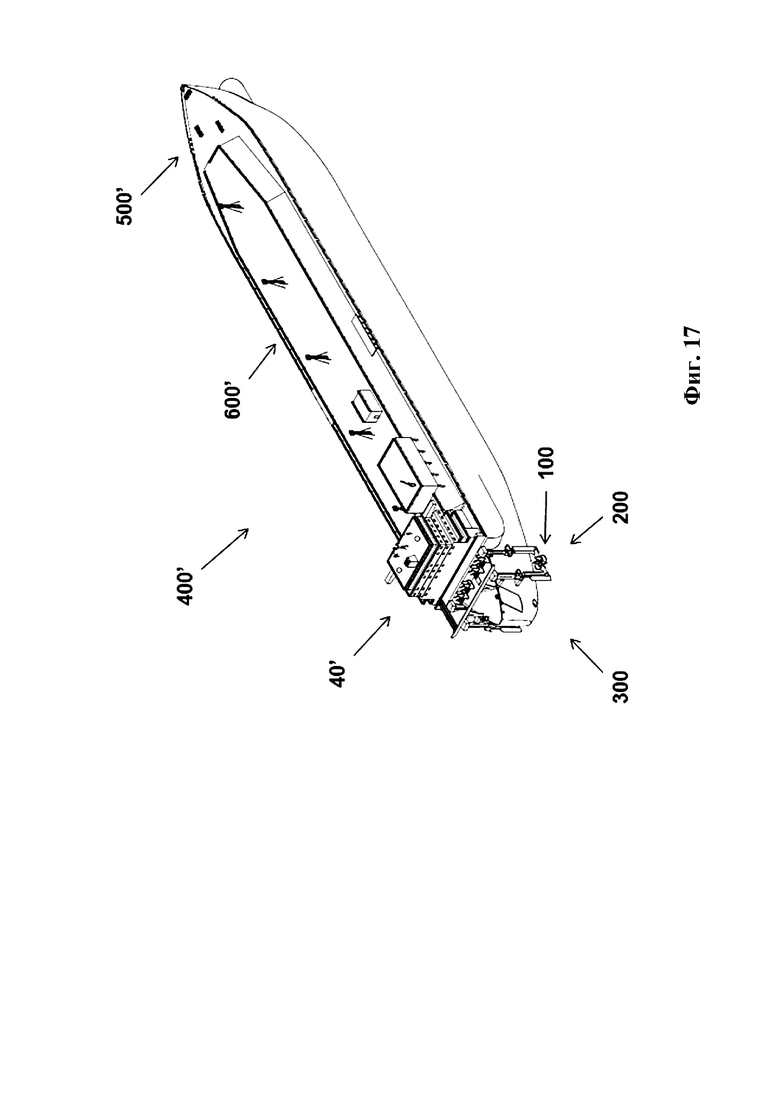
Этап соединения дополнительно включает фазу, на которой корму 40’ и новый модуль судна, образованный носом 500’ и центральной частью 600’, к которому присоединяют указанную корму 40’, выстраивают на плаву в линию для их точного последующего соединения, как показано на фиг. 16, при этом, наконец, образуют судно 400’, как показано на фиг. 17.
В конкретном случае, когда модуль 500’, 600’ судна соответствует судну, уже находящемуся в эксплуатации, из которого убирают корму, выполняют те же действия по присоединению кормы 40’, при этом образуется судно 400’.
Способ модульного построения судна 400’ предоставляет возможность лучшего использования ресурсов и возможность работать над модульным построением судна 400’ параллельно на разных верфях. Это позволяет управлять технологическими возможностями разных верфей и предоставляет возможность построения кормы 40’ судов 400’ на меньших верфях. В случае замены кормы судна, находящегося в эксплуатации, можно достичь минимального времени простоя судна, выведенного из эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОРСКОЕ САМОХОДНОЕ САМОПОДЪЕМНОЕ КРАНОВОЕ СУДНО | 2015 |
|
RU2603423C1 |
| ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС СУДНА | 2017 |
|
RU2661271C2 |
| УНИВЕРСАЛЬНОЕ ПОЛУПОГРУЖНОЕ КРУПНОТОННАЖНОЕ ТРАНСПОРТНОЕ СУДНО ДЛЯ ПЛАВАНИЯ В МОРЯХ С ЛЕДОВЫМ ПОКРОВОМ И НА ЧИСТОЙ ВОДЕ | 2015 |
|
RU2585199C1 |
| СУДНО | 2007 |
|
RU2437797C2 |
| Кормовая оконечность стабилизированного для штормового плавания корабля | 2015 |
|
RU2607135C2 |
| ЭКРАНОХОД | 2013 |
|
RU2545566C1 |
| Способ движения на "водной подушке" и глиссирующее судно для его осуществления | 2015 |
|
RU2615031C2 |
| Надводное однокорпусное водоизмещающее быстроходное судно с волнопрорезывающими обводами | 2019 |
|
RU2701622C1 |
| МОРСКОЕ СУДНО | 1995 |
|
RU2124451C1 |
| ГРЕБНО-ПАРУСНАЯ МОТОЛОДКА ПОЛЯ | 2013 |
|
RU2529042C1 |
Изобретение относится к области судостроения, в частности к судам с большим водоизмещающим корпусом и способам модульного построения судов с большим водоизмещающим корпусом. Предложено судно с большим водоизмещающим корпусом, содержащее корпус (10) и средства (100) тяги и управления, расположенные по каждой стороне диаметральной линии судна (400), которые содержат по меньшей мере один винт (152), обеспечивающий упор, параллельный диаметральной линии движения судна (400). Эти средства (100) расположены по левому и правому бортам (11, 12) корпуса (10), причем ортогональная проекция на плоскость воды находится снаружи катящейся поверхности судна (400), при этом указанные средства (100) сохраняются в пределах основной ширины, длины и осадки судна (400), при этом форма корпуса (10) выполнена таким образом, что нижний предел днища корпуса (10) в положении винта (152) находится под верхним пределом указанного винта (152). Технический результат заключается в улучшении эксплуатационных характеристик судна, технологичности его постройки. 2 н. и 10 з.п. ф-лы, 24 ил.
1. Судно с большим водоизмещающим корпусом, содержащее корпус (10) и установку (200) тяги и управления, расположенную по каждой стороне диаметральной линии (CL) судна (400, 400'), при этом установки (200) тяги и управления расположены на корме (40, 40') судна (400, 400'), причем каждая установка (200) тяги и управления содержит средства (100) тяги и управления, содержащие по меньшей мере один винт (152), при этом упор, параллельный диаметральной линии (CL), обеспечивается средствами (100) тяги и управления для движения судна (400, 400'), отличающееся тем, что средства (100) тяги и управления расположены по левому и правому бортам (11, 12) корпуса (10) таким образом, что ортогональная проекция указанных средств (100) тяги и управления на плоскость воды находится снаружи катящейся поверхности судна (400, 400'), при этом указанные средства (100) тяги и управления остаются в пределах основной ширины (MB), длины (L) и осадки (D) судна (400, 400'), причем форма корпуса (10) выполнена таким образом, что нижний предел (bb) днища (13) корпуса (10) в вертикальной и ортогональной плоскости относительно диаметральной линии (CL) положения винта (152) находится под верхним пределом (bp) указанного винта (152), при этом каждая установка (200) тяги и управления содержит опорную конструкцию (110), присоединенную по левому и правому бортам (11, 12) корпуса (10), поддерживающую соответствующие средства (100) тяги и управления.
2. Судно по п. 1, отличающееся тем, что днище (13) в центре длины (L) судна (400) сохраняется до расстояния от транца (19) кормы (40), равного 10% или меньше длины (L), измеренной от транца (19).
3. Судно по любому из предыдущих пунктов, отличающееся тем, что ширина судна (400) начинает уменьшаться вплоть до транца (19) кормы (40) от расстояния, равного 35% или меньше длины (L) указанного судна (400), измеренной от транца (19).
4. Судно по любому из предыдущих пунктов, отличающееся тем, что средства (100) тяги и управления содержат по меньшей мере один гребной комплекс (150), причем указанный гребной комплекс (150) содержит по меньшей мере один двигатель (151), при этом указанный двигатель (151) является электродвигателем, и по меньшей мере винт (152), при этом указанный двигатель (151) содержит выходной вал (153), параллельный катящейся поверхности и присоединенный к винту (152).
5. Судно по п. 4, отличающееся тем, что выходной вал (153) двигателя (151) каждого гребного комплекса (150) расположен в вертикальной плоскости, образуя постоянный угол (α), равный 8° или меньше, относительно вертикальной плоскости, проходящей через диаметральную линию (CL).
6. Судно по любому из предыдущих пунктов, отличающееся тем, что средства (100) тяги и управления выполнены с возможностью движения по высоте и расположения в более чем одном рабочем положении, в зависимости от загрузки судна (400, 400').
7. Судно по п. 6, отличающееся тем, что средства (100) тяги и управления выполнены с возможностью расположения над ватерлинией судна (400, 400') в нерабочем положении.
8. Судно по любому из предыдущих пунктов, отличающееся тем, что содержит убираемые средства (60) предупреждения столкновений, расположенные по левому и правому бортам (11, 12), защищающие установки (200) тяги и управления от ударов, когда они выпущены во время маневров судна (400, 400').
9. Судно по любому из предыдущих пунктов, отличающееся тем, что построено из множества модулей, соединенных вместе, причем один из указанных модулей является кормой (40') судна (400').
10. Способ построения судна (400') по п. 9, при этом способ включает:
- этап построения для построения кормы (40') судна (400'),
- этап навигационного перемещения, на котором корма (40') судна (400') самостоятельно плывет с помощью средств (100) тяги и управления к определенному месту назначения, и
- этап соединения, на котором на указанном месте назначения корму (40') судна (400') присоединяют к по меньшей мере одному модулю (500', 600') судна (400').
11. Способ по п. 10, отличающийся тем, что средства (100) тяги и управления судна (400') присоединяют к корме (40') судна (400') на этапе построения таким образом, что направление продвижения кормы (40') судна (400') является противоположным направлению продвижения судна (400'), которое необходимо построить, причем после этапа навигационного перемещения указанные средства (100) тяги и управления располагают в их конечном положении.
12. Способ по п. 10 или 11, отличающийся тем, что модуль (500', 600') судна (400') соответствует судну, находящемуся в эксплуатации.
| US 2014182501 A1, 03.07.2014 | |||
| US 3711755 A, 16.01.1973 | |||
| US 2005159053 A1, 21.07.2005 | |||
| US 6799528 B1, 05.10.2004 | |||
| US 5131875 A, 21.07.1992 | |||
| CN 103552650 A, 05.02.2014 | |||
| US 2013061796 A1, 14.03.2013 | |||
| Дымовая труба | 1980 |
|
SU945336A1 |
| US 3983830 A, 05.10.1976. | |||

