Предлагаемый способ относится к области управления и контроля движения транспортных средств, преимущественно к измерению времени и периодичности движения объектов по постоянным маршрутам.
Известны способы контроля и регистрации движения транспортных средств (авт. свид. СССР №746.680; патенты РФ №№2.042.211, 2.108.627, 2.130.416, 2.132.042, 2.204.497, 2.267.158, 2.285.933, 2.305.057, 2.338.263, 2.396.176; патенты США №№3.898.984, 4.857.716, 6.148.291, 6.901.331, 7.075.457; патент Франции №2.731.190 и другие).
Из известных способов наиболее близким к предлагаемому является «Способ контроля и регистрации движения транспортных средств» (патент РФ №2.042.211, G08G 1/123, 1994), который и выбран в качестве прототипа.
Известный способ основан на формировании на контрольных пунктах по пути следования транспортного средства высокочастотных последовательностей импульсов, преобразовании их в низкочастотные последовательности импульсов, которые синхронизируются с частотой системы единого времени, причем из полученной последовательности импульсов формируют числовую последовательность, отражающую значение реального времени, которую затем преобразуют в соответствии с заданным законом кодирования, индицируют, считывают полученную информацию в момент прохождения транспортных средств мимо контрольных пунктов, регистрируют полученную информацию и осуществляют передачу ее на диспетчерский пункт, где производят анализ полученной информации.
Недостатками известного способа являются невозможность измерения времени и периодичности движения в случае, если транспортное средство движется по маршруту без расписания или графика, т.е. относится к разряду угнанных и особенно важных, а также отсутствие дистанционного контроля и регистрации его движения.
Технической задачей изобретения является повышение достоверности дистанционного контроля и регистрации угнанных и особенно важных транспортных средств.
Поставленная задача решается тем, что способ контроля и регистрации движения транспортных средств, заключающийся, в соответствии с ближайшим аналогом, в формировании на контрольных пунктах по пути следования транспортного средства высокочастотных последовательностей импульсов на несущей частоте ωc, считывании полученной информации в момент прохождения транспортных средств мимо контрольных пунктов, регистрации полученной информации и осуществлении передачи ее на диспетчерский пункт, где производят ее анализ, отличается от ближайшего аналога тем, что облучают высокочастотными последовательностями импульсов на несущей частоте ωс транспортные средства, снабженные радиочастотными метками, в момент их прохождения мимо контрольных пунктов, улавливают их радиочастотной меткой преобразуют высокочастотные последовательности импульсов в акустическую волну, обеспечивают возможность для ее распространения по поверхности пьезокристалла, обратного отражения, преобразования в сложный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует идентификационному номеру транспортного средства, и излучения в эфир, принимают сложный сигнал с фазовой манипуляцией на частоте ωс на контрольном пункте, перемножают его с низкочастотным напряжением, пропорциональным идентификационному номеру M1(t) транспортного средства, выделяют гармоническое колебание на частоте ωс, перемножают его с принимаемым сложным сигналом с фазовой манипуляцией, выделяют низкочастотное напряжение, пропорциональное идентификационному номеру M1(t) транспортного средства, формируют модулирующий код M2(t), соответствующий номеру контрольного пункта, задерживают его на время τ1, равное длительности Τ1 модулирующего кода M1(t), τ1=Τ1, формируют модулирующий код M3(t), соответствующий текущему времени, задерживают его на время τ2, равное длительности Τ1 и Т2 модулирующих кодов M1(t) и M2(t) соответственно, τ2=Τ1+Т2, суммируют модулирующие коды Μ1(t)+Μ2(t)+Μ3(t)=Μ∑(t), преобразуют высокочастотные последовательности импульсов по частоте с использованием частоты ωг1 первого гетеродина, выделяют напряжение первой промежуточной частоты ωпр1=ωс+ωг1, манипулируют его по фазе суммарным модулирующим кодом M∑(t), усиливают по мощности, излучают в эфир, принимают на диспетчерском пункте, преобразуют по частоте с использованием частоты ωг2 второго гетеродина, выделяют напряжение второй промежуточной частоты ωпр2=ωпр1-ωг2, удваивают его фазу, измеряют ширину спектра напряжения второй промежуточной частоты и его второй гармоники, и в случае их различия разрешают дальнейшую обработку сложного сигнала с фазовой манипуляцией на второй промежуточной частоте ωпр2, делят фазу второй гармоники напряжения второй промежуточной частоты 2ωпр2 на два, выделяют гармоническое колебание на второй промежуточной частоте ωпр2, используют его в качестве опорного напряжения для синхронного детектирования сложного сигнала с фазовой манипуляцией на второй промежуточной частоте ωпр2, выделяют низкочастотное напряжение, пропорциональное суммарному модулирующему коду M3(t), фиксируют и анализируют его.
Структурные схемы устройств, реализующие предлагаемый способ, представлены на фиг. 1, 2 и 3.
Радиочастотная метка, размещенная на транспортном средстве, содержит пьезокристалл 5, на поверхности которого изготовлены встречно-штыревой преобразователь (ВШП) поверхностных волн (ПАВ) и набор 10 отражателей. ВШП содержит две гребенчатые системы электродов 7, которые соединены друг с другом шинами 8 и 9, связанными с микрополосковой приемопередающей антенной 6, также изготовленной на поверхности пьезокристалла 5.
Аппаратура, размещенная на контрольном пункте, содержит последовательно включенные генератор 1 высокочастотных последовательностей импульсов, первый усилитель 2 мощности, дуплексер 3, вход-выход которого связан с приемопередающей антенной 4, второй перемножитель 13, второй вход которого соединен с выходом фильтра 15 нижних частот, узкополосный фильтр 14, первый перемножитель 12, второй вход которого соединен с выходом дуплексера 3, фильтр 15 нижних частот сумматор 20, фазовый манипулятор 25 и второй усилитель 26 мощности, выход которого соединен с вторым входом дуплексера 3. К выходу генератора 1 высокочастотных последовательностей импульсов последовательно подключены первый смеситель 23, второй вход которого соединен с выходом первого гетеродина 22, и усилитель 24 первой промежуточной частоты, выход которого соединен с вторым входом фазового манипулятора 25. Выход сумматора 20 подключен к входу первого блока 21 регистрации и анализа. Выход генератора 16 псевдослучайной последовательности (ПСП) через первую линию задержки 17 подключен к второму входу сумматора 20. Выход системы 18 единого времени через вторую линию задержки 19 подключен к третьему входу сумматора 20. Перемножители 12 и 13, узкополосный фильтр 14 и фильтр 15 нижних частот образуют демодулятор 11 сложных ФМн-сигналов.
Аппаратура, размещенная на диспетчерском пункте, содержит последовательно включенные приемную антенну 27, усилитель 28 высокой частоты, второй смеситель 30, второй вход которого соединен с выходом второго гетеродина 29, усилитель 31 второй промежуточной частоты, удвоитель 33 фазы, второй анализатор 35 спектра, блок 36 сравнения, второй вход которого через первый анализатор 34 спектра соединен с выходом усилителя 31 второй промежуточной частоты, пороговый блок 37, второй вход которого через третью линию задержки 38 соединен с его выходом, ключ 39, второй вход которого соединен с выходом усилителя 31 второй промежуточной частоты, фазовый детектор 42 и второй блок 43 регистрации и анализа. К выходу удвоителя 33 фазы последовательно подключены делитель 40 фазы на два и узкополосный фильтр 41, выход которого соединен с вторым входом фазового детектора 42. Удвоитель 33 фазы, анализаторы 34 и 35 спектра, блок 36 сравнения, пороговый блок 37 и третья линия задержки 38 образуют обнаружитель 32 сложных ФМн-сигналов.
Предлагаемый способ контроля и регистрации движения транспортных средств реализуется следующим образом.
На контрольном пункте генератором 1 высокочастотных последовательностей импульсов формируются высокочастотные последовательности импульсов
Uc(t)=υc*Cos(ωct+ϕc), 0≤t≤ТС,
которые после усиления в первом усилителе 2 мощности через дуплексер 3 поступают в приемопередающую антенну 4, излучаются ею в эфир, облучают транспортные средства в момент их прохождения мимо контрольного пункта, улавливаются микрополосковой антенной 6 радиочастотной меткой, установленный на транспортном средстве, и преобразуются ВШП в акустическую волну. Последняя распространяется по поверхности пьезокристалла, отражается набором отражателей 10 и опять преобразуется встречно-штыревой системой в сложный сигнал с фазовой манипуляцией (ФМн)
 0≤t≤TC,
0≤t≤TC,
где ϕk1(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t).
При этом внутренняя структура сформированного сложного ФМн-сигнала определяется топологией встречно-штыревого преобразователя, имеет индивидуальный характер и содержит всю необходимую уникальную информацию о транспортном средстве, например идентификационный номер, год выпуска, завод изготовитель и т.п.
В качестве примера на фиг. 1 показана структура модулирующего кода М1(t): 1011010010.
Принцип работы радиочастотной метки основан на том, что переменные в пространстве и времени электрические поля, создаваемые в пьезоэлектрическом кристалле 5 системой электродов 7, вызывают из-за пьезоэффекта упругие деформации, которые распространяются в кристалле в виде ПАВ.
В основе работы приборов на ПАВ лежат три физических процесса:
- преобразование входного электрического сигнала в акустическую волну;
- распространение акустической волны вдоль поверхности звукопровода;
- отражение и обратное преобразование ПАВ в электрический закодированный сигнал.
Для прямого и обратного преобразования ПАВ используются различные преобразователи, наибольшее распространение среди которых получили встречно-штыревые преобразователи (ВШП).
Радиочастотная метка устанавливается на транспортном средстве в месте, известном только владельцу, и служит средством для обнаружения угнанного и особо важного транспортных средств при их прохождении мимо контрольных пунктов.
Сформированный сложный ФМн-сигнал U1(t) излучается микрополосковой приемопередающей антенной 6 в эфир, принимается приемопередающей антенной 4 контрольного пункта и через дуплексер 3 поступает на первые входы первого 12 и второго 13 перемножителей. На второй вход первого перемножителя 12 подается опорное напряжение с выхода узкополосного фильтра 14
UO(t)=υo*Cos(ωct+ϕс).
На выходе перемножителя 12 образуется напряжение

где υн1=1/2*υ1*υо,
из которого фильтром 15 нижних частот выделяется низкочастотное напряжение
UH1(t)=υн1*Cosϕk1(t).
Это напряжение поступает на второй вход второго перемножителя 13. На выходе последнего образуется напряжение
где υ2=1/2*υ1*υн1;
υо=2υ2.
Так формируется опорное напряжение UО(t), необходимое для синхронного детектирования принимаемого ФМн-сигнала U1(t), непосредственно из самого принимаемого ФМн-сигнала U1(t).
Это осуществляется с помощью демодулятора 11, состоящего из перемножителей 12 и 13, узкополосного фильтра 14 и фильтра 15 нижних частот. Причем указанный демодулятор свободен от явления «обратной работы», присущего известным демодулятором ФМн-сигналов (схемы Пистолькорса А.А., Сидорова В.И., Костаса Д.Ф. и Травина Г.А.).
Низкочастотное напряжение UН1(t) с выхода фильтра 15 нижних частот поступает на первый вход сумматора 20.
Генератор 16 псевдослучайной последовательности (ПСП) формирует модулирующий код M2(t), соответствующий номеру контрольного пункта. Этот код через первую линию задержки 17 поступает на второй вход сумматора 20. Причем время задержки τ1 линии задержки 17 выбирается равным длительности T1 модулирующего кода M1(t) (τ1=T1). Система 18 единого времени формирует код M3(t), соответствующий текущему времени, который через вторую линию задержки 19 поступает на третий вход сумматора 20. Причем время задержки τ2 второй линии задержки 19 выбирается приблизительно равным длительности T1 и Т2 модулирующих кодов M1(t) и M2(t) соответственно (τ2=Т1+Т2).
На выходе сумматора 20 образуется суммарный модулирующий код
M∑(t)=M1(t)+M2(t)+M3(t),
длительностью τ∑=τ1+τ2.
Напряжение UС(t) с выхода генератора 1 высокочастотных последовательностей импульсов одновременно поступает на вход первого смесителя 23, на второй вход которого подается напряжение первого гетеродина 22
UГ1(t)= υг1*Cos(ωг1t+ϕг1).
На выходе смесителя 23 образуются напряжения комбинационных частот. Усилителем 24 выделяется напряжение первой промежуточной (суммарной) частоты

где υпр1=1/2*υc*υг1;
ωпр1=ωс+ωг1 - первая промежуточная (суммарная) частота;
ϕпр1=ϕс+ϕг1,
которое поступает на первый вход фазового манипулятора 25, на второй вход которого подается суммарный модулирующий код M∑(t) с выхода сумматора 20. Указанный модулирующий код M∑(t) одновременно фиксируется блоком 21 регистрации.
На выходе фазового манипулятора 25 формируется сложный ФМн-сигнал
 0≤t≤TС,
0≤t≤TС,
где ϕk2(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с суммарным модулирующим кодом M∑(t),
который после усиления во втором усилителе 26 мощности через дуплексер 3 поступает в приемопередающую антенну 4, излучается ею в эфир, улавливается приемной антенной 27 диспетчерского пункта и через усилитель 28 высокой частоты поступает на первый вход второго смесителя 30, на второй вход которого подается напряжение второго гетеродина 29

На выходе смесителя 30 образуются напряжения комбинационных частот. Усилителем 31 выделяется напряжение второй промежуточной (разностной) частоты
 0≤t≤TC,
0≤t≤TC,
где υпр2=1/2*υпр1*υг2;
ωпр2=ωпр1-ωг2 - вторая промежуточная (разностная) частота;
ϕпр2=ϕпр1-ϕг2,
которое поступает на вход обнаружителя 32 сложного ФМн-сигнала, состоящего из удвоителя 33 фазы, анализаторов 34 и 35 спектра, блока 36 сравнения, порогового блока 37 и третьей линии 38 задержки. При этом на выходе удвоителя 33, в качестве которого может использоваться перемножитель, на два входа которого подается один и тот же сигнал UПР2(t), образуется гармоническое напряжение
 0≤t≤TС,
0≤t≤TС,
где υ4=1/2*υ2пр2,
в котором манипуляция фазы уже отсутствует, так как 2ϕk2(t)={0, 2π}.
Ширина спектра Δω2 второй гармоники сигнала определяется длительностью ТC сигнала (Δω2=1/ТC), тогда как ширина спектра Δωс ФМн-сигнала определяется длительностью τэ его элементарных посылок (Δωс=1/τэ).
Следует отметить, что длительность ТC ФМн-сигнала определяется следующим образом:
TC=N*τэ,
где τэ - длительность элементарных посылок;
N - количество элементарных посылок.
Ширина спектра Δω2 второй гармоники сигнала в N раз меньше ширины спектра Δωс ФМн-сигнала (Δωс/Δω2=N).
Следовательно, при удвоении фазы ФМн-сигнала его спектр «сворачивается» в N раз. Это обстоятельство и позволяет обнаружить и отселектировать ФМн-сигнал даже тогда, когда его мощность на входе приемника меньше мощности шумов и помех.
Ширина спектра Δωс ФМн-сигнала измеряется с помощью анализатора спектра 34, а ширина спектра Δω2 второй гармоники сигнала - с помощью анализатора спектра 35. Напряжения UI и UII, пропорциональные Δωс и Δω2 соответственно, с выходов анализаторов спектра 34 и 35 поступают на два входа блока 36 сравнения. Так как UI>>UII, то на выходе блока 36 сравнения образуется положительное напряжение, которое превышает пороговый уровень Uпор в пороговом блоке 37. Пороговое напряжение Uпор выбирается таким, чтобы его не превышали случайные помехи и простые сигналы. При превышении порогового уровня Uпор в пороговом блоке 37 формируется постоянное напряжение, которое поступает на управляющий вход ключа 39, открывая его, и на вход третьей линии задержки 38, время задержки τэ которой выбирается таким, чтобы можно было зафиксировать обнаруженный ФМн-сигнал. По истечении этого времени напряжение с выхода линии задержки поступает на второй вход порогового блока 37 и сбрасывает его содержимое на нулевой уровень. При этом ключ 39 закрывается, а обнаружитель 32 готов к приему следующего ФМн-сигнала. Напряжение UПР2(t) с выхода усилителя 31 второй промежуточной частоты через открытый ключ 39 поступает на первый (информационный) вход фазового детектора 42.
Гармоническое напряжение U4(t) с выхода удвоителя 33 фазы поступает на вход делителя 40 фазы на два, на выходе которого образуется гармоническое напряжение
 0≤t≤TС,
0≤t≤TС,
которое выделяется узкополосным фильтром 41, используется в качестве опорного напряжения и подается на второй (опорный) вход фазового детектора 42. На выходе которого образуется низкочастотное напряжение

где υн2=1/2*υпр2*υ5,
пропорциональное суммарному модулирующему коду M∑(t). Это напряжение поступает на вход блока 43 регистрации и анализа.
Таким образом, предлагаемый способ по сравнению с прототипом обеспечивает повышение достоверности дистанционного контроля и регистрации угнанных и особенно важных транспортных средств. Это достигается использованием радиочастотных меток, устанавливаемых на транспортных средствах, и симплексной радиосвязи между контрольными пунктами и диспетчерским пунктом с использованием сложных сигналов с фазовой манипуляцией.
К основным характеристикам радиочастотных меток можно отнести следующие:
- мощность генератора высокочастотных последовательностей импульсов - не более 10 мВт;
- частотный диапазон - 400-420 МГц;
- дальность - не менее 50 м.;
- тип излучаемого сигнала - гармоническое колебание;
- тип отраженного (переизлученного) сигнала - сложный сигнал с фазовой манипуляцией;
- габариты радиочастотной метки - 8×15×5 мм.;
Основной особенность радиочастотных меток являются малые размеры и отсутствие источников питания.
Большим преимуществом предлагаемого метода является использование сложных сигналов с фазовой манипуляцией, которые обладают высокой энергетической и структурной скрытностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИСПЕТЧЕРСКАЯ СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ ГОРОДСКОГО ТРАНСПОРТА | 2016 |
|
RU2630945C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ САМОЛЕТОВ, ПОТЕРПЕВШИХ КАТАСТРОФУ | 2015 |
|
RU2630272C2 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2007 |
|
RU2348560C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2278047C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ УСТРОЙСТВА ДРЕНАЖНОЙ ЗАЩИТЫ ПОДЗЕМНОЙ КОММУНИКАЦИИ | 2016 |
|
RU2621641C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2582502C2 |
| СПОСОБ МАТЕРИАЛЬНО-ТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ С УПРАВЛЕНИЕМ МЕСТОПОЛОЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2588339C2 |
| УСТРОЙСТВО ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И КРАЖ | 2004 |
|
RU2262457C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2004 |
|
RU2269821C1 |
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2365932C1 |
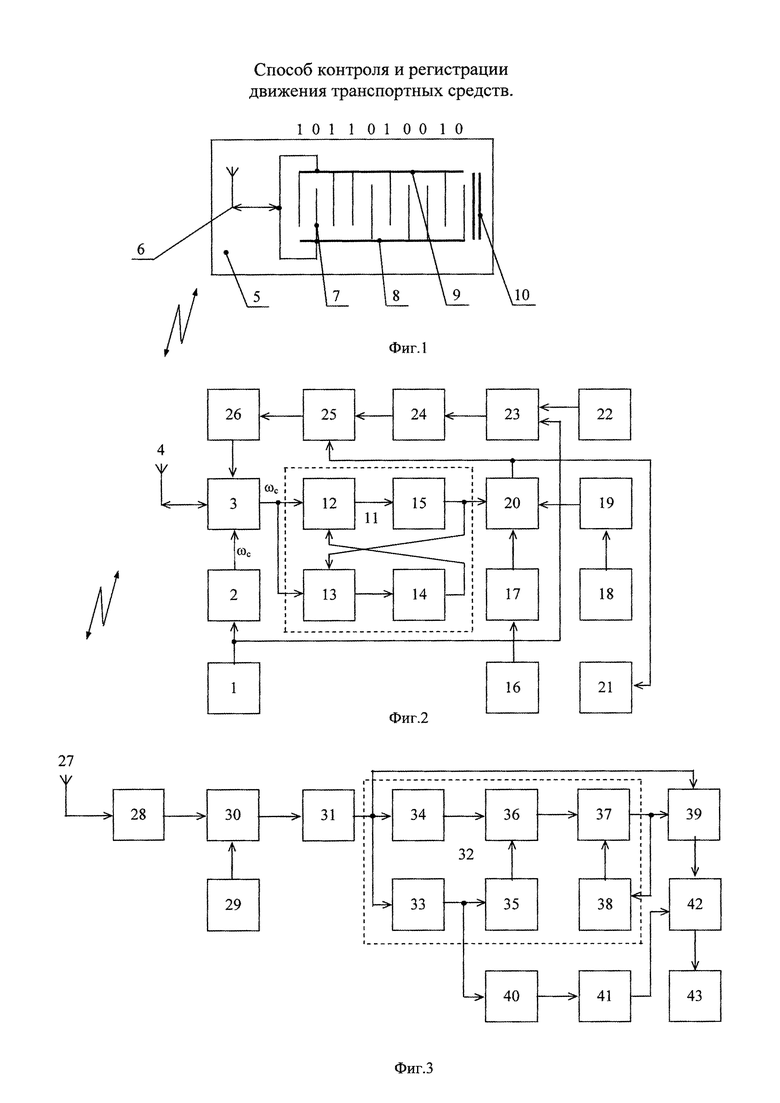
Предлагаемый способ реализуется радиочастотными метками, устанавливаемыми на транспортных средствах, и аппаратурой, устанавливаемой на контрольных и диспетчерском пунктах. Радиочастотная метка содержит пьезокристалл 5, микрополосковую антенну 6, электроды 7, шины 8 и 9, набор отражателей 10. Аппаратура, устанавливаемая на контрольных пунктах, содержит генератор 1 высокочастотных последовательностей импульсов, первый 2 и второй 26 усилители мощности, дуплексер 3, приемопередающую антенну 4, демодулятор 11 ФМн-сигналов, перемножители 12 и 13, узкополосный фильтр 14, фильтр 15 нижних частот, генератор 16 псевдослучайной последовательности, первую 17 и вторую 19 линии задержки, систему 18 единого времени, сумматор 20, блок 21 регистрации и анализа, первый гетеродин 22, первый смеситель 23, усилитель 24 первой промежуточной частоты и фазовый манипулятор 25. Аппаратура на диспетчерском пункте содержит приемную антенну 27, усилитель 28 высокой частоты, второй гетеродин 29, второй смеситель 30, усилитель 31 второй промежуточной частоты, обнаружитель 32 сложных ФМн-сигналов, удвоитель 33 фазы, первый 34 и второй 35 анализаторы спектра, блок 36 сравнения, пороговый блок 37, третью линию задержки 38, ключ 39, делитель 40 фазы на два, узкополосный фильтр 41, фазовый детектор 42, блок 43 регистрации и анализа. Повышается достоверность дистанционного контроля транспортных средств. 3 ил.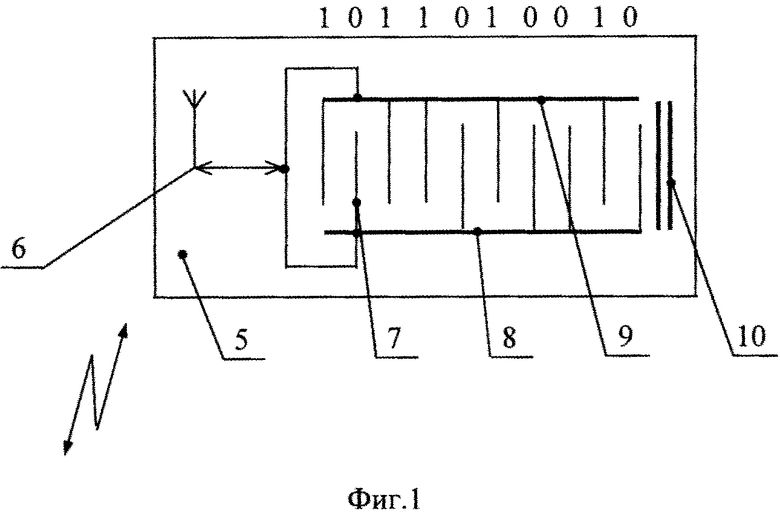
Способ контроля и регистрации движения транспортных средств, заключающийся в формировании на контрольных пунктах по пути следования транспортного средства высокочастотных последовательностей импульсов на несущей частоте ωc, считывании полученной информации в момент прохождения транспортных средств мимо контрольных пунктов, регистрации полученной информации и осуществлении передачи ее на диспетчерский пункт, где производят ее анализ, отличающийся тем, что облучают высокочастотными последовательностями импульсов на несущей частоте ωc транспортные средства, снабженные радиочастотными метками, в момент их прохождения мимо контрольных пунктов, улавливают их радиочастотной меткой, преобразуют высокочастотные последовательности импульсов в акустическую волну, обеспечивают возможность для ее распространения по поверхности пьезокристалла, обратного отражения, преобразования в сложный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует идентификационному номеру транспортного средства, и излучения в эфир, принимают сложный сигнал с фазовой манипуляцией на частоте ωс на контрольном пункте, перемножают его с низкочастотным напряжением, пропорциональным идентификационному номеру M1(t) транспортного средства, выделяют гармоническое колебание на частоте ωc, перемножают его с принимаемым сложным сигналом с фазовой манипуляцией, выделяют низкочастотное напряжение, пропорциональное идентификационному номеру M1(t) транспортного средства, формируют модулирующий код М2(t), соответствующий номеру контрольного пункта, задерживают его на время τ1, равное длительности T1 модулирующего кода M1(t), τ1=T1, формируют модулирующий код M3(t), соответствующий текущему времени, задерживают его на время τ2, равное длительности Т1 и Т2 модулирующих кодов M1(t) и М2(t) соответственно, τ1=T1+Т2, суммируют моделирующие коды M1(t)+M2(t)+M3(t)=MΣ(t), преобразуют высокочастотные последовательности импульсов по частоте с использованием частоты ωг1 первого гетеродина, выделяют напряжение первой промежуточной частоты ωпр2=ωc+ωr1, манипулируют его по фазе суммарным модулирующим кодом MΣ(t), усиливают по мощности, излучают в эфир, принимают на диспетчерском пункте, преобразуют по частоте с использованием частоты ωг2 второго гетеродина и выделяют напряжение второй промежуточной частоты ωпр2=ωпр1-ωr2, удваивают его фазу, измеряют ширину спектра напряжения второй промежуточной частоты и его второй гармонии, и в случае их различия разрешают дальнейшую обработку сложного сигнала с фазовой манипуляцией на второй промежуточной частоте ωпр2, делят фазу второй гармонии напряжения второй промежуточной частоты 2ωпр2 на два, выделяют гармоническое колебание на второй промежуточной частоте ωпр2, используют его в качестве опорного напряжения для синхронного детектирования сложного сигнала с фазовой манипуляцией на второй промежуточной частоте ωпр2, выделяют низкочастотное напряжение, пропорциональное суммарному модулирующему коду М3(t), фиксируют и анализируют его.
| СПОСОБ КОНТРОЛЯ И РЕГИСТРАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1994 |
|
RU2042211C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В УСЛОВИЯХ НАСЕЛЕННОГО ПУНКТА | 2005 |
|
RU2297046C1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 3182312 A, 04.05.1965. | |||

