Уровень техники
В рабочих машинах разных типов для работы на определенном участке используют нож или ковш. Например, экскаватор имеет ковш, который можно перемещать, чтобы зачерпывать или иным образом вращать, чтобы удалять материал с поверхности (например, земли). Аналогично, грейдер имеет нож, который можно перемещать для изменения высоты и угла ножа. Машина на гусеничном ходу, как правило, представляет собой гусеничную машину с ковшом, который можно поднимать или опускать, а также вращать. Это просто примеры рабочих машин, имеющих нож или ковш, которые можно перемещать со многими степенями свободы для взаимодействия с рабочим участком.
Поскольку рабочая машина сталкивается с нагрузками и сопротивлением разных размеров, для рабочей машины полезно определить, нужно ли исправить положение ножа или ковша. Для этого рабочие машины, такие как перечисленные выше, могут содержать инерциальный измерительный блок (IMU), который измеряет наклон и ускорение ковша или ножа для использования в управлении уклоном. IMU представляет собой устройство, которое включает в себя любую комбинацию акселерометров, гироскопов и магнитометров для получения показаний ускорения и наклона относительно ножа или ковша рабочей машины.
Для обеспечения точности управления уклоном сигналы IMU должны быть точными. Соответственно, эти IMU требуют калибровки для учета нестабильности внутренних деталей и допусков на монтаж IMU на раме рабочей машины. В настоящее время процесс калибровки IMU для управления уклоном рабочей машины занимает относительно много времени и создает возможность для человеческой ошибки.
Вышеприведенное обсуждение предоставлено только для общей справочной информации и не предназначено для использования в качестве помощи в определении объема заявленного предмета изобретения.
Сущность изобретения
Предложен способ калибровки системы управления уклоном. Способ включает размещение смартфона на первом определенном месте калибровки рабочей машины. Смартфон определяет наклон первого определенного места калибровки относительно силы тяжести. Смартфон размещают во втором определенном месте калибровки рабочей машины, и он определяет наклон второго определенного места калибровки относительно силы тяжести. Наклон первого и второго определенных мест калибровки автоматически передается в систему управления уклоном и используется для последующего управления уклоном. Также представлено мобильное устройство и рабочая машина с системой управления уклоном.
Это описание сущности изобретения дано для того, чтобы в упрощенной форме предоставить выбор концепций, которые далее приведены в подробном описании. Это описание сущности изобретения не предназначено для выявления ключевых признаков или основных признаков заявленного предмета изобретения, а также не предназначено для использования в качестве помощи в определении объема заявленного предмета изобретения. Заявленный предмет изобретения не ограничен вариантами осуществления, которые решают любые или все недостатки, отмеченные в предыдущем уровне техники.
Краткое описание чертежей
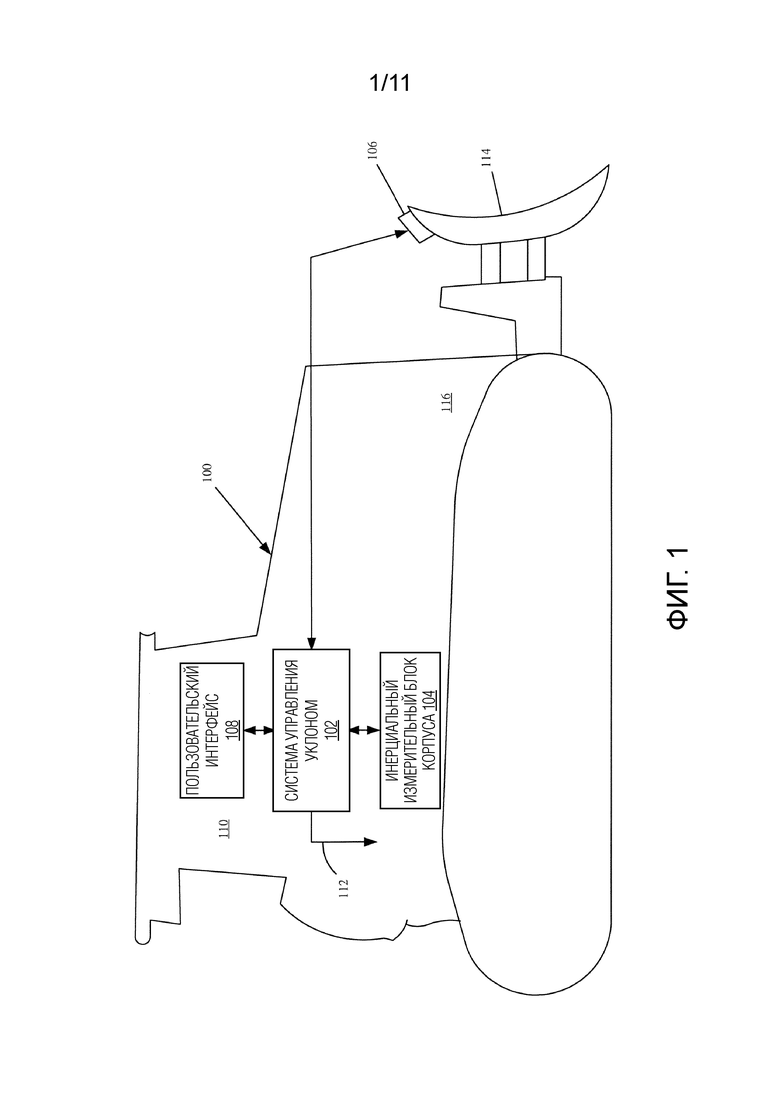
На ФИГ. 1 представлен схематичный вид иллюстративного гусеничного бульдозера, использующего систему управления уклоном, с которой описанные здесь варианты осуществления являются особенно полезными.
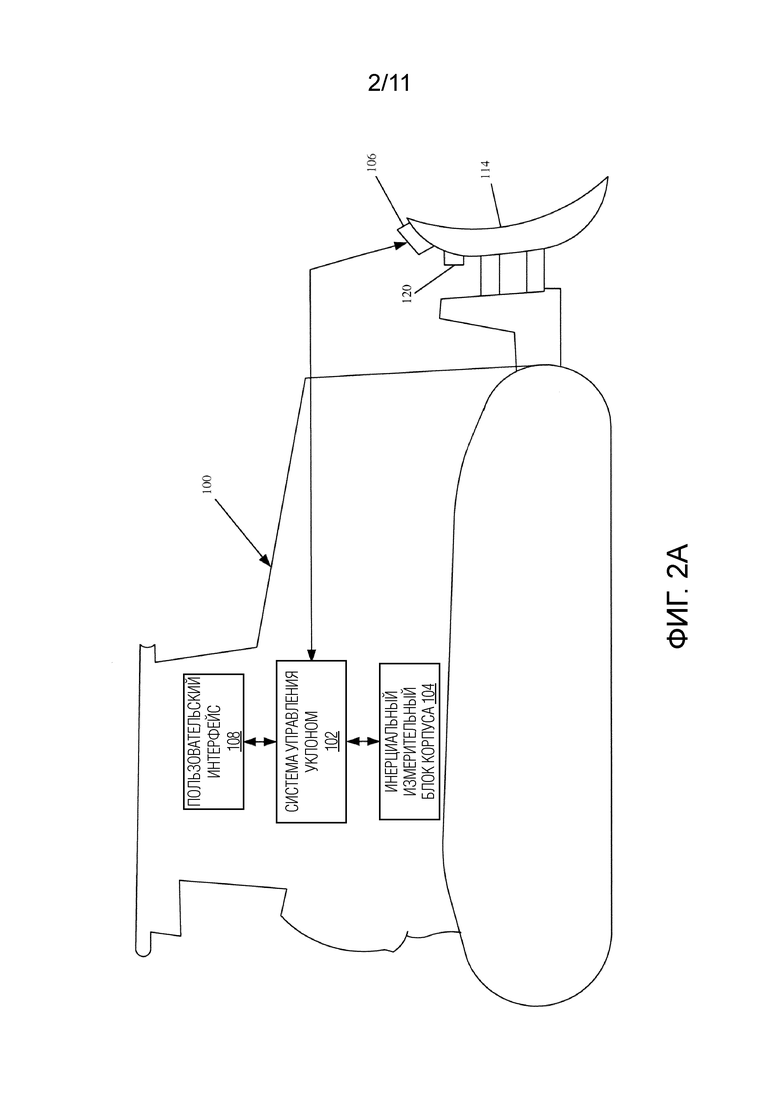
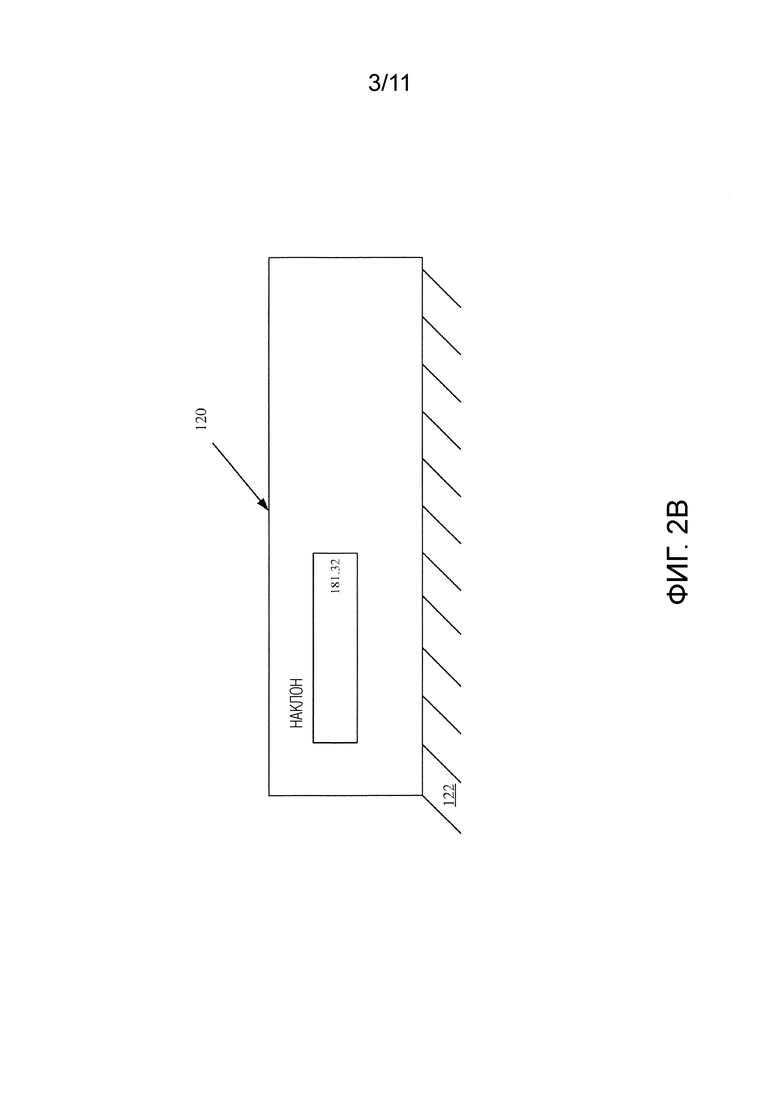
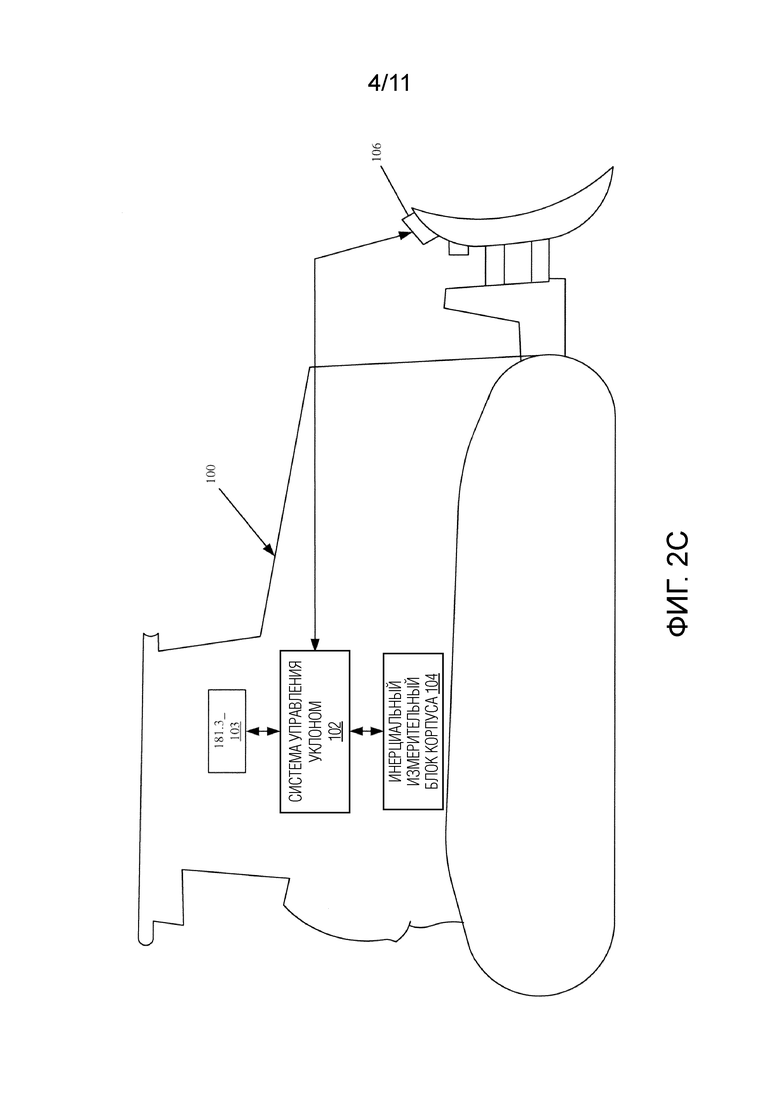
На ФИГ. 2А-2С представлена калибровка IMU системы интеллектуального управления уклоном.
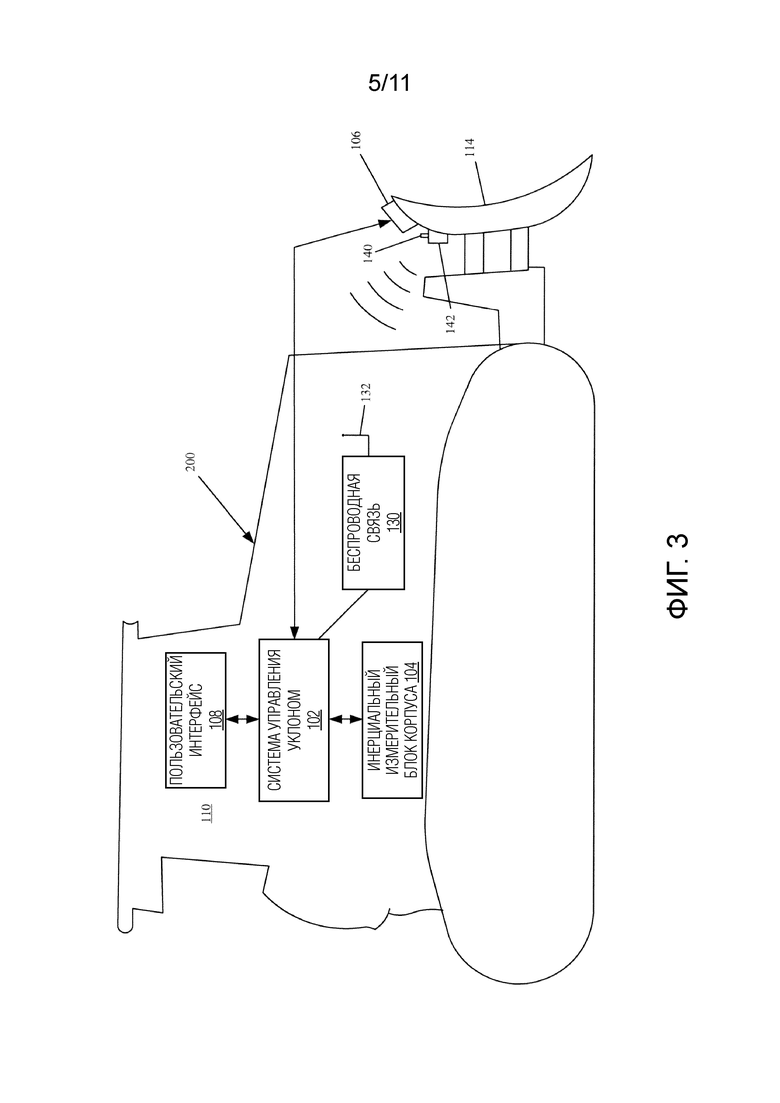
На ФИГ. 3 представлен схематичный вид рабочей машины (гусеничного бульдозера) согласно одному варианту осуществления.
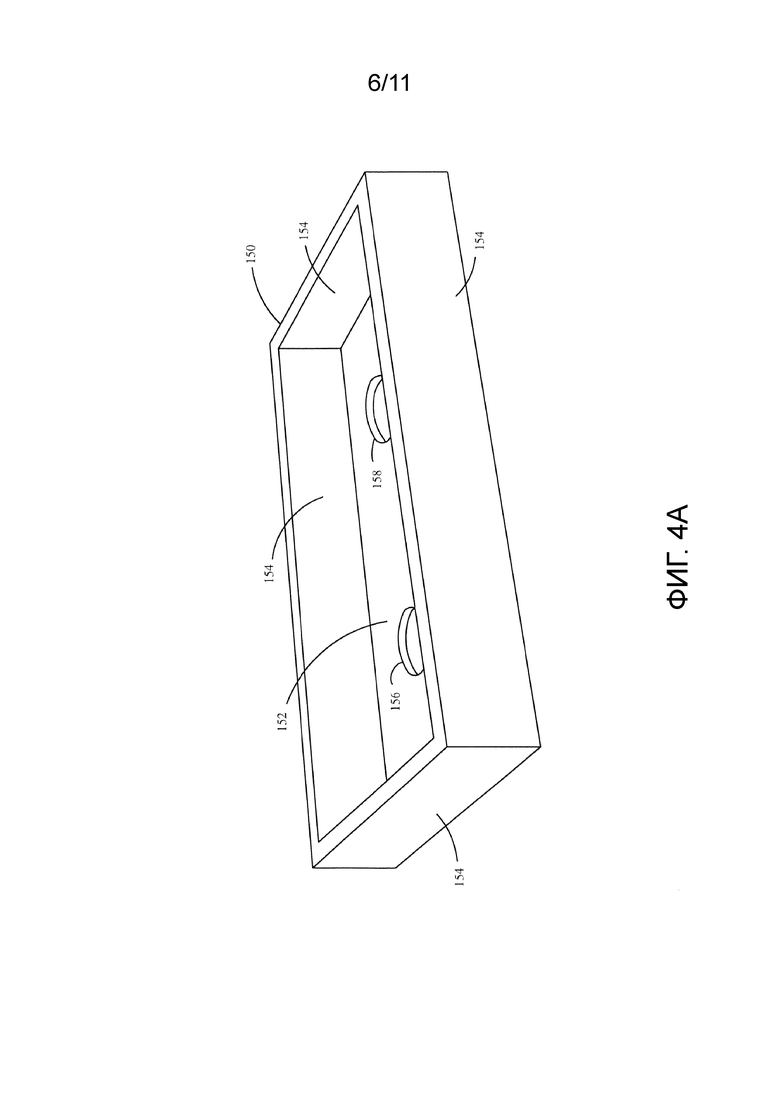
На ФИГ. 4A представлен схематичный вид несущего устройства для смартфона для калибровки IMU ножа согласно одному варианту осуществления.
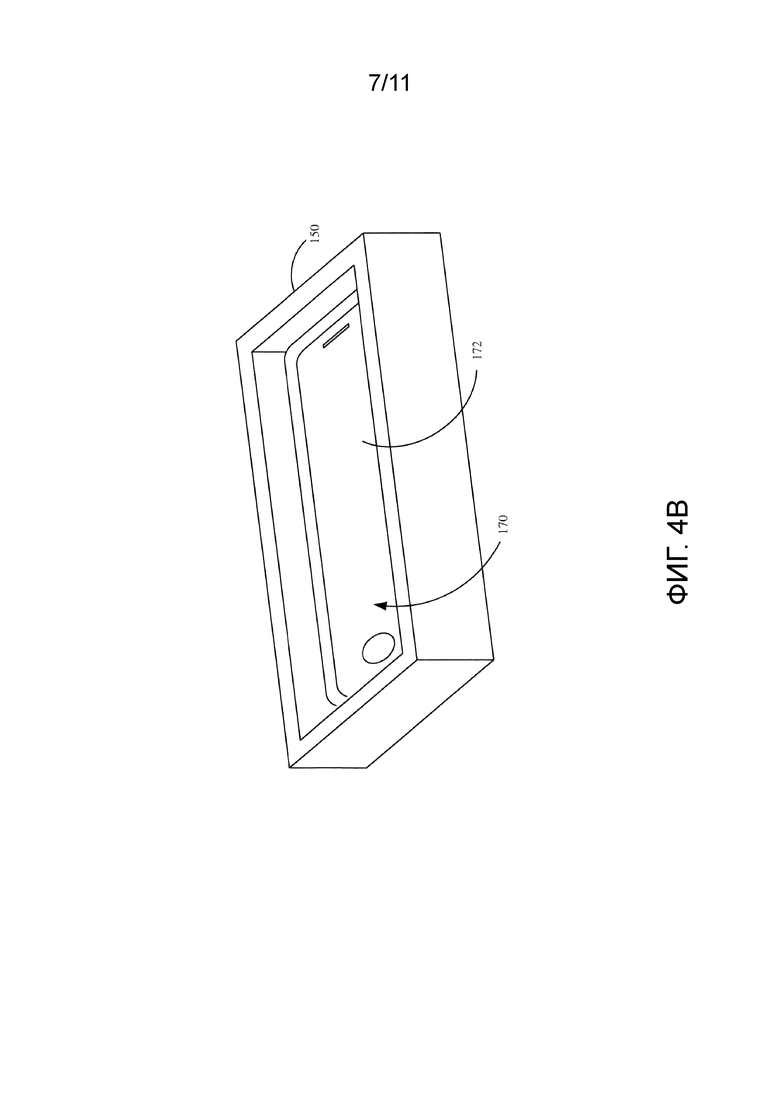
На ФИГ. 4B представлен схематичный вид, показывающий смартфон, удерживаемый в несущем устройстве для калибровки IMU ножа согласно одному варианту осуществления.
На ФИГ. 5 представлен схематичный вид иллюстративного смартфона, с которым используются описанные здесь варианты осуществления.
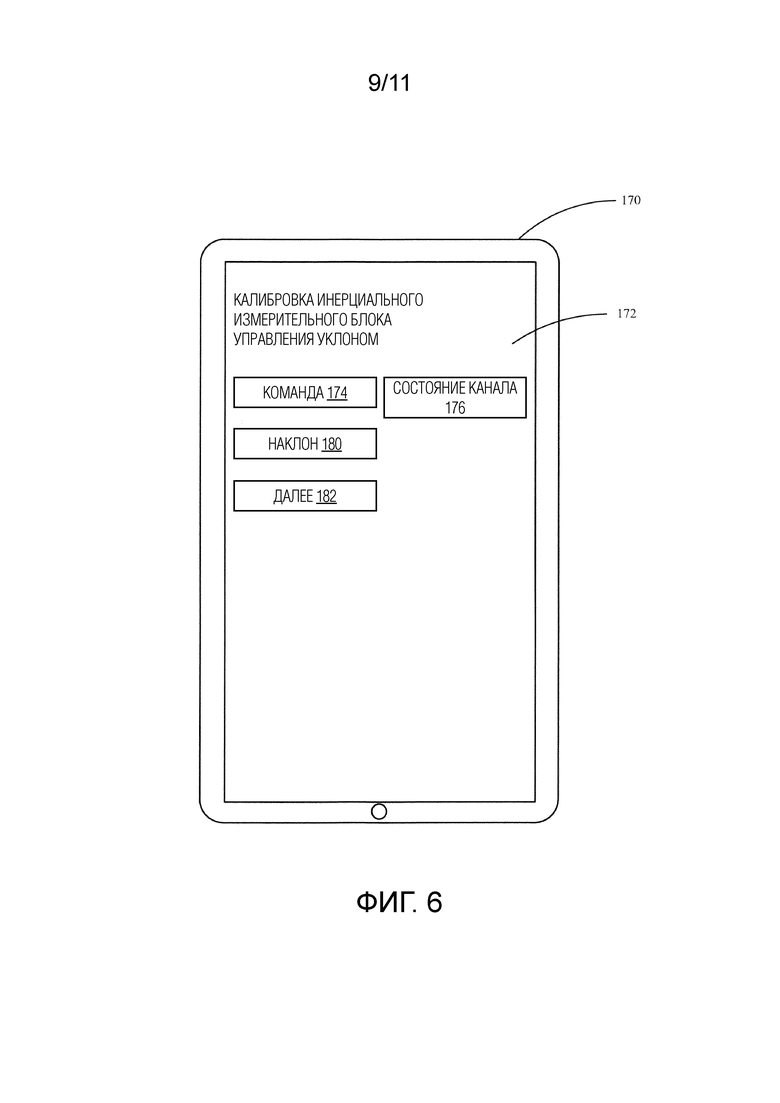
На ФИГ. 6 представлен схематичный вид экрана смартфона во время калибровки IMU согласно варианту осуществления.
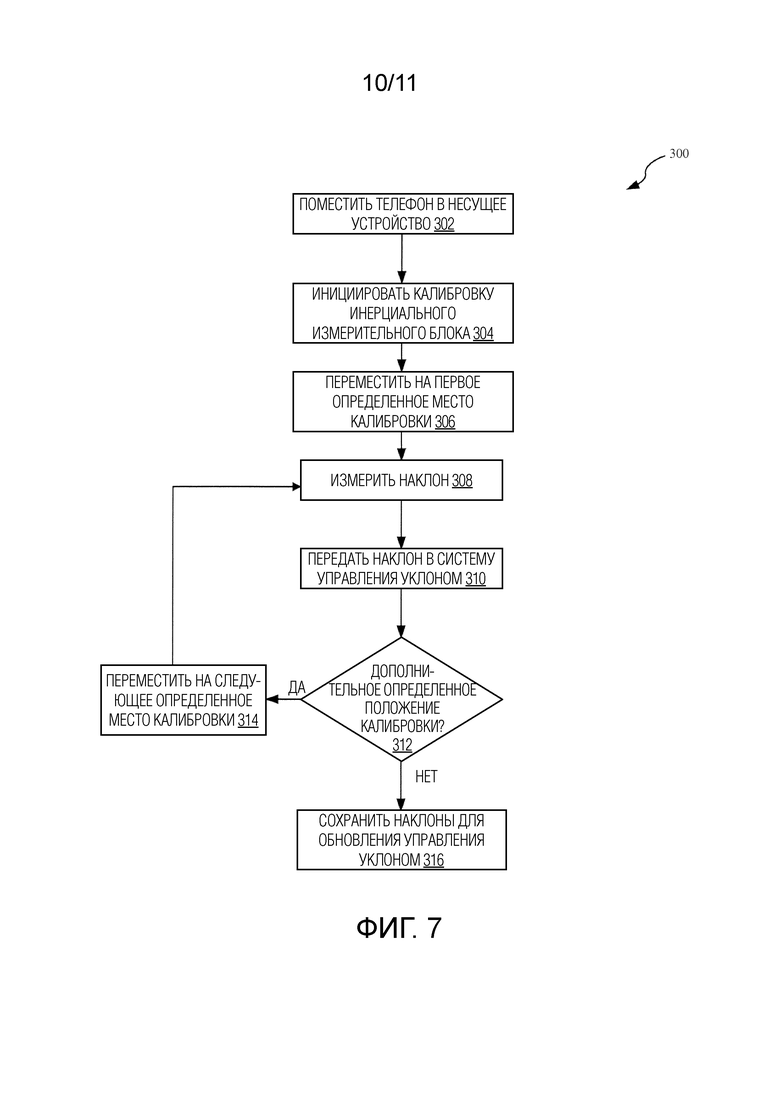
На ФИГ. 7 представлена блок-схема способа калибровки системы управления уклоном согласно варианту осуществления.
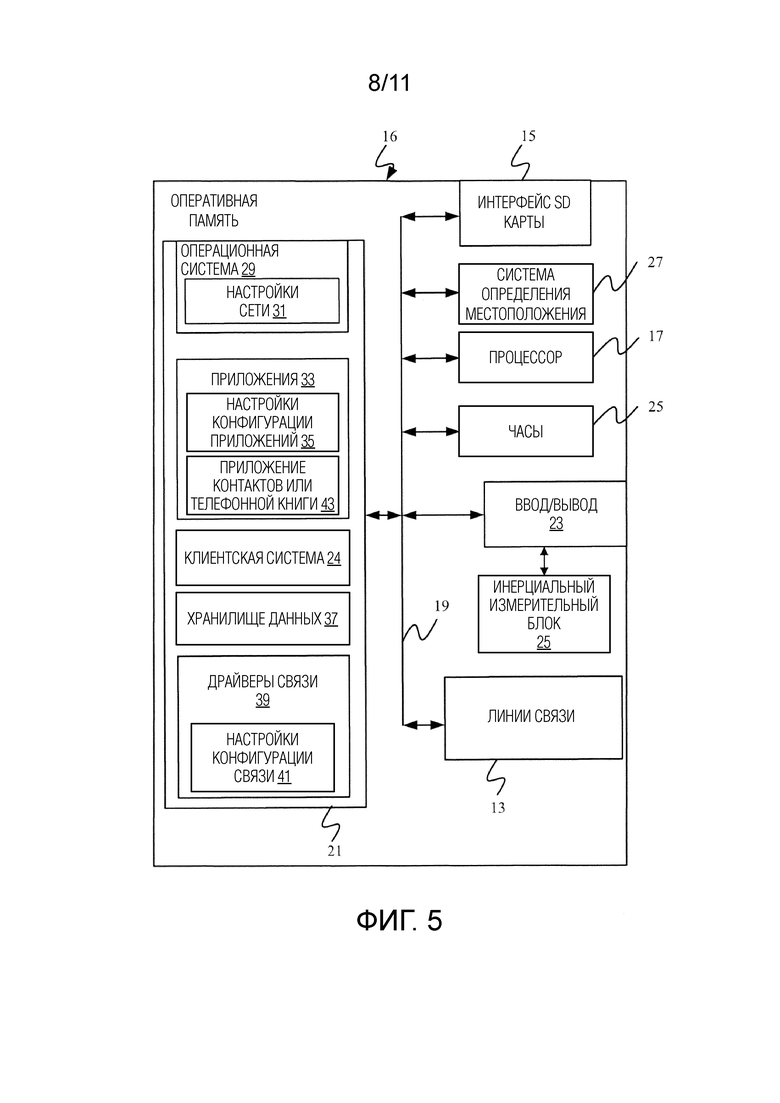
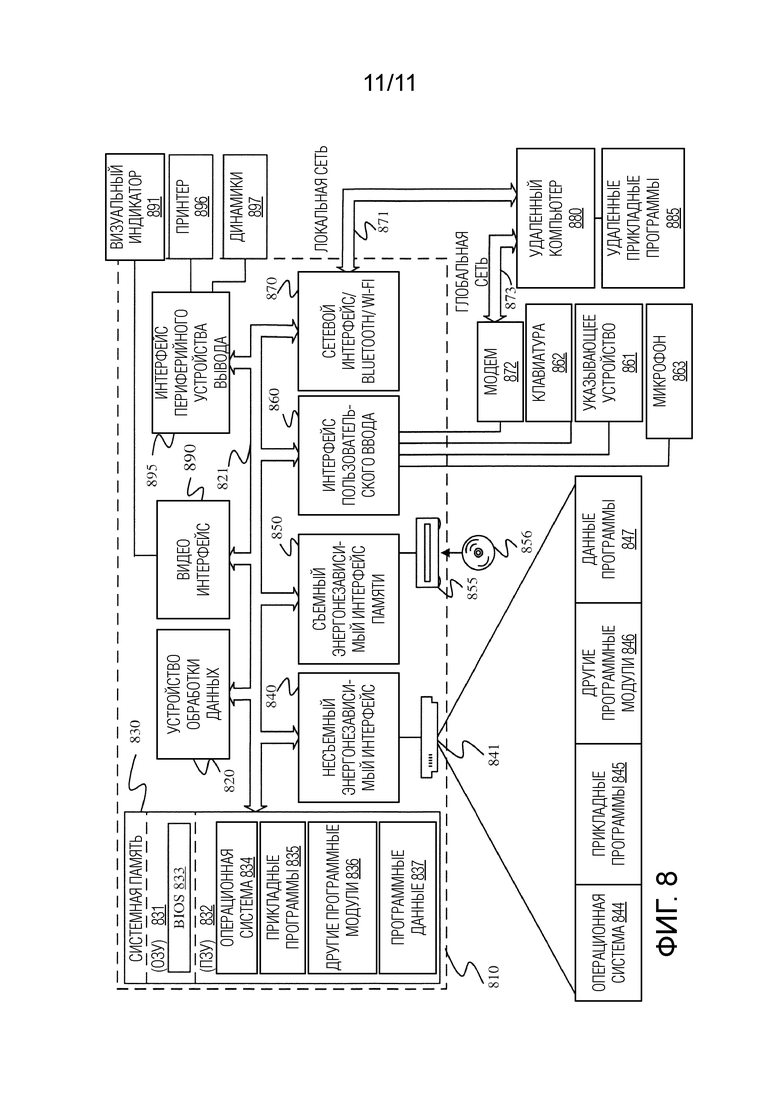
На ФИГ. 8 представлена блок-схема компьютерной среды, которая может составлять всю или часть системы интеллектуального управления уклоном для рабочей машины.
Подробное описание настоящего изобретения
На ФИГ. 1 представлен схематичный вид иллюстративного гусеничного бульдозера 100, который использует систему 102 управления уклоном. Как показано, система 102 управления уклоном коммуникативно связана с IMU 104 корпуса, а также с IMU 106 ножа. Кроме того, система 102 управления уклоном также связана с пользовательским интерфейсом 108, расположенным в кабине 110 гусеничного бульдозера 100. Система 102 управления уклоном может содержать любую комбинацию схем обработки, логических схем и программного обеспечения для получения входных сигналов от IMU 104 корпуса и IMU 106 ножа и генерирования выходных данных регулировки уклона как указано под ссылочной позицией 112. Эти выходные данные можно подавать в один или несколько подходящих контроллеров гидравлических клапанов для генерирования компенсаторного движения ножа 106. Способность системы 102 управления уклоном определять движение ножа 114 относительно корпуса 116 позволяет гусеничному бульдозеру 100 автоматически определять условия, при которых будут полезны автоматические регулировки. Например, система 102 управления уклоном может автоматически поднимать и опускать нож 114 в ответ на измеренные различия между положением ножа и заданным уклоном. Кроме того, считается, что использование системы 102 управления уклоном может уменьшить или иным образом ограничить число проходов, необходимых для всей рабочей операции, тем самым уменьшая скорость износа ходового устройства гусеничного бульдозера 100.
На ФИГ. 2A представлен схематичный вид гусеничного бульдозера 100, когда требуется калибровка IMU 106 ножа. Как показано, внешнее устройство уровня, обозначенное ссылочной позицией 120, физически связано с ножом 114. Внешнее устройство 120 уровня, когда оно соединено таким образом, обеспечит индикацию наклона ножа в заданном месте, с которым оно связано. На ФИГ. 2B представлен схематичный вид внешнего устройства 120 уровня с указанием наклона (181.32) поверхности 122, на которую он опирается. Во время калибровки система 102 управления уклоном принимает сигналы IMU от IMU 104 корпуса и IMU 106 ножа. Оператор отвечает за ввод показаний от внешнего индикатора 120 в пользовательский интерфейс 108. Как показано на ФИГ. 2C, пользователь ввел цифры 181.3 в пользовательский интерфейс 108. Предположительно, пользователь завершит ввод данных вводом цифры «2». Однако, как можно понять, пользователи могут вводить ошибочную информацию. Кроме того, чтобы ввести информацию в пользовательский интерфейс 108, пользователь должен обычно перемещаться из места, где он или она может визуально видеть цифровую индикацию на внешнем индикаторе 120 наклона, в кабину 110 для взаимодействия с пользовательским интерфейсом 108. Затем, как только этот ввод данных завершен, калибровка будет продолжаться, когда пользователь переместит внешний индикатор 120 наклона в другое заданное место на ноже 114. После такого перемещения пользователь снова будет считывать информацию о наклоне, запоминать информацию о наклоне при входе в кабину 110 гусеничного бульдозера 100 и вводить правильную информацию о наклоне в пользовательский интерфейс 108. Соответственно, калибровка IMU 106 ножа, хотя и необходима для обеспечения значительных преимуществ системы 102 автоматического управления уклоном, влечет за собой относительно трудоемкий процесс, который вносит возможность человеческой ошибки.
На ФИГ. 3 представлен схематичный вид гусеничного бульдозера 200 согласно варианту осуществления настоящего изобретения. Хотя варианты осуществления будут описаны в отношении калибровки IMU 106 ножа, явно предполагается, что калибровка IMU 104 корпуса также может быть выполнена аналогичным образом. В гусеничном бульдозере 200 использовано много тех же составных частей, что и в гусеничном бульдозере 100, и подобные компоненты пронумерованы аналогично. Основное различие между гусеничным бульдозером 200 и гусеничным бульдозером 100 заключается в добавлении модуля 130 беспроводной связи, который связан с системой 102 управления уклоном. Модуль 130 беспроводной связи соединен с антенной 132 для передачи и приема данных беспроводной связи. Подходящие примеры беспроводной связи включают, без ограничения, связь на нелицензированной полосе частот 2,4 ГГц в соответствии со спецификацией Bluetooth (такой как базовая спецификация Bluetooth 5.0, принятая 2 декабря 2016 г. - а также совместимые спецификации Bluetooth), связь на частоте 2,4 ГГц с использованием протокола беспроводной связи (WiFi) (например, IEEE 802.11b, IEEE 802.11g или другие), связь на частоте 5,0 ГГц с использованием протокола WiFi или другие. Предпочтительно в модуле 130 беспроводной связи использовать технологии беспроводной связи, которые способны связываться непосредственно с сотовым телефоном пользователя. Современные сотовые телефоны, которые связываются в соответствии с Bluetooth-связью и/или WiFi-связью, являются относительно распространенными. Однако, явно предполагается, что в модуле 130 беспроводной связи можно использовать любую технологию беспроводной связи для прямой или опосредованной связи (например, через Интернет) с сотовым телефоном пользователя. Как показано на ФИГ. 3, сотовый телефон 140 пользователя помещен внутри несущего устройства 142 и установлен в том же заданном месте калибровки, что и внешний индикатор 120 (показанный на ФИГ. 2А). При такой конфигурации сотовый телефон 140 использует свой собственный внутренний IMU, чтобы предоставить внешний показатель наклона относительно ножа 114. Затем, либо автоматически, либо после получения вводных данных от пользователя, показатель наклона автоматически беспроводным способом передается на модуль 130 беспроводной связи, который предоставляет измеренный показатель наклона системе 102 управления уклоном. Поскольку система 102 управления уклоном связана с IMU 106 ножа и получила внешний показатель наклона от телефона 140, система 102 управления уклоном может генерировать параметры компенсации, чтобы корректировать информацию, полученную от IMU 106 ножа. Кроме того, если необходимо передвинуть узел смартфон/несущее устройство в другое предварительно определенное место калибровки на ноже 114, такой процесс более эффективен, поскольку пользователю не требуется подниматься в кабину 110 и вводить информацию вручную в пользовательский интерфейс 108. Вместо этого пользователь может оставаться рядом с ножом 114 и просто передвинуть узел смартфон/несущее устройство во второе предварительно определенное место калибровки, чтобы начать измерение наклона второго предварительно определенного места калибровки. Как можно понять, пользователь может перемещаться по нескольким предварительно определенным позициям калибровки и автоматически или вручную отправлять измеренную информацию о наклоне в систему 102 управления уклоном через модуль 130 беспроводной связи. Это значительно сокращает время, необходимое для калибровки IMU 106 ножа, и в то же время гарантирует, что информация передается точно в систему 102 управления уклоном, снижая вероятность человеческой ошибки, поскольку не требуется ручной ввод данных в пользовательский интерфейс 108.
На ФИГ. 4А представлен схематичный вид несущего устройства 150 для использования смартфона для калибровки IMU ножа согласно варианту осуществления настоящего изобретения. Несущее устройство 150 обычно содержит основание 152, окруженное несколькими боковыми стенками 154. В варианте осуществления, показанном на ФИГ. 4А, использовано четыре боковые стенки 154. Кроме того, одна или несколько боковых стенок 154 могут быть выполнены с возможностью передвижения для размещения смартфонов разных размеров. Более того, дополнительные материалы, такие как пенорезина или другие подходящие эластомеры, могут быть расположены на внутренней поверхности одной или нескольких боковых стенок 154, чтобы удерживать смартфон, помещенный в них. В то время как различные конструктивные модификации несущего устройства 150 могут быть выполнены для того, чтобы облегчить фиксацию или иное удержание смартфона, расположенного в нем, важно, чтобы плоскость смартфона надежно поддерживалась относительно основания 152. Это происходит потому, что IMU смартфона используется для генерирования внешнего показателя наклона. Кроме того, как показано на ФИГ. 4А, несущее устройство 150 содержит одну или несколько деталей для точного монтажа в предварительно определенном месте калибровки на ноже рабочей машины. В проиллюстрированном варианте осуществления базовая часть 152 имеет пару отверстий 156, 158, которые взаимодействуют с круглыми выступами, предусмотренными на ноже (не показаны) в заданных местах калибровки, чтобы точно установить несущее устройство 150 в том же положении и направлении каждый раз, когда требуется калибровка. Хотя показана пара отверстий 156, 158, специалистам в данной области техники будет понятно, что между несущим устройством 150 и ножом 114 можно использовать различные совместно действующие детали для надежного и точного закрепления или размещения несущего устройства 150 относительно ножа 114, когда требуется калибровка IMU ножа.
На ФИГ. 4B представлен схематичный вид, показывающий смартфон 170, удерживаемый боковыми стенками 154 несущего устройства 150. Кроме того, в проиллюстрированном варианте осуществления смартфон 170 удерживается в направлении, которое позволяет пользователю взаимодействовать с экраном 172 смартфона 170. Это предпочтительный вариант осуществления, в котором взаимодействие пользователя с экраном смартфона обычно является более интуитивным взаимодействием. Тем не менее, явно предполагается, что можно применить варианты осуществления, в которых смартфон 170 отвечает на голосовые команды, и, таким образом, пользователю не обязательно взаимодействовать с экраном 172 для выполнения описанных здесь калибровок IMU ножа.
На ФИГ. 5 представлен схематичный вид иллюстративного мобильного устройства, для которого подходят описанные здесь варианты осуществления. Как показано на ФИГ. 5, мобильное устройство 16 содержит все аппаратные компоненты, необходимые для калибровки системы управления уклоном. В устройстве 16 предусмотрена линия 13 связи, которая позволяет мобильному устройству обмениваться данными с другими вычислительными устройствами и, согласно некоторым вариантам осуществления, обеспечивает канал для автоматического получения информации, например, путем сканирования. Примеры линии 13 связи содержат разрешение связи через один или несколько протоколов связи, таких как службы беспроводной связи, используемые для предоставления сотового доступа к сети, а также протоколы, которые обеспечивают локальные беспроводные соединения с сетями. К примерам такой связи относятся связь в соответствии со спецификацией Bluetooth и/или связь в соответствии с протоколом связи WiFi.
Согласно другим вариантам осуществления приложения можно разместить на съемной SD карте, которая подсоединена к интерфейсу 15. Интерфейс 15 и линии 13 связи обмениваются данными с процессором 17 по информационной шине 19, также подключенной к памяти 21, и с компонентами 23 ввода/вывода (I/O), а также с часами 25 и системой 27 определения местоположения.
Для облегчения операций ввода и вывода в одном варианте осуществления предусмотрены компоненты 23 ввода/вывода. Компоненты 23 ввода/вывода для различных вариантов осуществления устройства 16 могут содержать компоненты ввода, такие как кнопки, датчики касания, оптические датчики, микрофоны, сенсорные экраны, датчики приближения, акселерометры, датчики ориентации и компоненты вывода, такие как устройство отображения, динамик и или порт принтера. Также можно использовать другие компоненты 23 ввода/вывода. Например, IMU 25 мобильного устройства 16 может быть функционально связан с процессором 17 через компоненты 23 ввода/вывода.
Часы 25 иллюстративно содержат компонент часов реального времени, который выводит время и дату. В качестве иллюстрации они также могут обеспечивать функции синхронизации процессора 17.
Система 27 определения местоположения иллюстративно содержит компонент, который выводит текущее географическое местоположение устройства 16. Это может быть, например, приемник глобальной системы определения местоположения (GPS), система LORAN, инерциальная система наведения, система сотовой триангуляции или другая система позиционирования. Это также может быть, например, картографическое программное обеспечение или навигационное программное обеспечение, которое создает нужные карты, навигационные маршруты и выполняет другие географические функции.
В памяти 21 хранится операционная система 29, сетевые настройки 31, приложения 33, настройки конфигурации приложений 35, хранилище 37 данных, драйверы 39 связи и настройки 41 конфигурации связи. Память 21 может представлять собой все виды реальных энергозависимых и энергонезависимых машиночитаемых устройств памяти. Это также может быть компьютерный накопитель данных (описанный ниже). В памяти 21 хранятся машиночитаемые команды, после исполнения которых процессор 17 выполняет компьютеризованные этапы или функции в соответствии с командами. Процессор 17 может быть активирован другими компонентами, чтобы также облегчить их функциональность. Приложения 33 содержат резидентное приложение смартфона для калибровки IMU 106 ножа рабочей машины 200. Таким образом, вызванное или иным образом задействованное приложение калибровки руководит или иным образом помогает пользователю в выполнении калибровки IMU.
На ФИГ. 6 представлен схематичный вид экрана смартфона во время калибровки IMU согласно варианту осуществления настоящего изобретения. Смартфон 170 выполняет описанное выше приложение калибровки IMU ножа, как показано на экране 172. В проиллюстрированном примере, приложение калибровки предоставляет пользователю одну или несколько команд 174. Например, когда приложение калибровки запускается изначально, команды могут потребовать от пользователя войти в кабину 110 рабочей машины и взаимодействовать с пользовательским интерфейсом 108, чтобы привести систему управления уклоном в состояние калибровки, в котором она восприимчива к получению от смартфона 170 информации о наклоне по беспроводной сети. Кроме того, команды могут также содержать указание пользователю разместить узел смартфона/несущего устройства в первом предварительно определенном месте калибровки ножа 114. Хотя команды могут быть полностью текстовыми, также явно предусматривается, что можно подавать графические изображения заданных мест калибровки относительно ножа либо общего гусеничного бульдозера, либо конкретного ножа гусеничного бульдозера.
Как показано на ФИГ. 6, приложение калибровки IMU может предоставлять показатель 176 относительно его линии беспроводной связи с модулями 130 беспроводной связи системы 102 управления уклоном. Хотя варианты осуществления описаны в основном в отношении информации, передаваемой беспроводным способом в модуль 130 беспроводной связи, если линия связи по той или иной причине не работает, приложение калибровки управления уклоном может также измерять наклон в каждой заданной позиции калибровки, так что наклон измеряется для всех заданных мест калибровки и сохраняется смартфоном 170. Затем, если связь все еще недоступна, когда пользователь повторно входит в кабину 110, смартфон 170 можно подключить к системе 102 управления уклоном через любое подходящее проводное соединение, чтобы передать сохраненную информацию о наклоне в систему 102 управления уклоном. Таким образом, преимущества оперативности и сокращения ввода данных все еще могут быть достигнуты, когда нет связи. Приложение калибровки также содержит показатель текущего измеренного наклона 180. Показатель 180 наклона может также показывать индикатор выполнения, указывающий пользователю, что в настоящее время измеряется несколько значений наклона, и сколько времени потребуется в целом для подготовки усредненного значения наклона. Кроме того, приложение калибровки управления уклоном также обычно содержит кнопку 182 «далее», которая после активации будет передавать измеренную информацию о наклоне в систему 102 управления уклоном беспроводным способом и будет указывать приложению калибровки управления уклоном, что пользователь готов переместить узел смартфон/несущее устройство на следующую предварительно определенную позицию калибровки на ноже. Этот процесс будет повторяться до тех пор, пока не будет измерен наклон для всех заданных позиций калибровки ножа 114, и такая информация о наклоне не будет передана смартфоном 170 в систему 102 управления уклоном.
На ФИГ. 7 представлена блок-схема последовательности операций способа калибровки системы управления уклоном согласно варианту осуществления настоящего изобретения. Способ 300 начинается на этапе 302, где смартфон помещают в калибровочное несущее устройство. Затем на этапе 304 начинается калибровка IMU. В одном примере запуск калибровки IMU выполняют как через пользовательский интерфейс 108, расположенный в кабине 110 рабочей машины, так и путем запуска или иного вызова приложения калибровки IMU на смартфоне. Однако могут быть применены варианты осуществления, когда после запуска приложения калибровки на смартфоне приложение смартфона автоматически связывается с модулем 130 беспроводной связи системы 102 управления уклоном, чтобы дать команду системе управления уклоном войти в состояние калибровки. Соответственно, могут быть применены некоторые варианты осуществления, когда пользователю не нужно напрямую взаимодействовать с пользовательским интерфейсом 108, чтобы заставить систему 102 управления уклоном перейти в состояние калибровки. Несмотря ни на что, на этапе 306 смартфон/несущее устройство перемещают в первое заданное место калибровки на ноже рабочей машины. После такого позиционирования способ 300 переходит к этапу 308, где смартфон измеряет наклон первого предварительно определенного места калибровки на ноже. Затем на этапе 310 измеренная информация о наклоне передается в систему 102 управления уклоном, предпочтительно по беспроводной связи. Далее, на этапе 310 или в любое другое время во время калибровки, система 102 управления уклоном будет получать информацию IMU от IMU 106 ножа. Таким образом, путем сравнения полученной информации от IMU ножа и измеренной информации о наклоне, переданной со смартфона, система управления уклоном генерирует корригирующие параметры для исправления полученной информации IMU ножа, чтобы соответствовать внешней измеренной информации о наклоне со смартфона. В точке решения 312 способ 300 определяет, требуются ли дополнительные предварительно определенные позиции калибровки. Это определение может быть выполнено приложением, выполняющимся на смартфоне пользователя, или посредством беспроводной связи с системой 102 управления уклоном через модуль 130 беспроводной связи.
Если требуются дополнительные предварительно определенные позиции калибровки, способ 300 переходит к этапу 314, где приложение указывает пользователю, что смартфон/несущее устройство должен быть перемещен в следующую заданную позицию калибровки. Как описано выше, это может быть в форме текстовых команд и/или может содержать визуальную индикацию следующей заданной позиции калибровки на ноже. Когда узел смартфон/несущее устройство размещен в следующей заданной позиции калибровки, пользователь может указать это через экран смартфона или другой подходящий ввод, и способ 300 вернется к этапу 308, где измеряется наклон на следующей заданной позиции калибровки. Таким образом, способ 300 будет повторять все предварительно определенные позиции калибровки. Как можно понять, пользователь может располагаться вблизи ножа 114 во время всей процедуры калибровки IMU ножа. Кроме того, вся измеренная информация о наклоне передается со смартфона 170 в систему 102 управления уклоном, не требуя от пользователя ввода какой-либо измеренной информации о наклоне. Таким образом, вероятность ошибочного ввода уменьшается. Если в точке решения 312 определено, что никаких дополнительных заданных позиций калибровки не существует, способ 300 переходит к этапу 316, где измеренная информация о наклоне сохраняется системой 102 управления уклоном и используется для обновленного управления уклоном.
В настоящем обсуждении были упомянуты процессоры и серверы. В одном варианте осуществления процессоры и серверы содержат компьютерные процессоры со связанной памятью и схемой синхронизации, которые не показаны отдельно. Они являются функциональными частями систем или устройств, к которым они принадлежат, и активируются посредством и облегчают функциональность других компонентов или элементов в этих системах.
Также обсуждался ряд дисплеев пользовательского интерфейса. Они могут иметь самые разнообразные формы и могут иметь широкий спектр различных механизмов ввода, активируемых пользователем. Например, активируемыми пользователем механизмами ввода могут быть текстовые поля, флажки, значки, ссылки, выпадающие меню, поля поиска и т.д. Они могут быть активированы также самыми разнообразными способами. Например, их можно активировать посредством устройства «указать и щелкнуть» (такого как трекбол или мышь). Их можно активировать посредством аппаратных кнопок, переключателей, джойстика или клавиатуры, клавишных переключателей или вогнутых кнопок большого пальца и т.д. Их также можно активировать посредством виртуальной клавиатуры или других виртуальных приводов. Кроме того, если экран, на котором они отображаются, является сенсорным экраном, их можно активировать посредством сенсорных жестов. Кроме того, если устройство, отображающее их, имеет компоненты распознавания речи, их можно активировать посредством речевых команд.
На ФИГ. 8 представлен один из вариантов осуществления вычислительной среды, в которой могут быть приведены в действие элементы интеллектуальной системы 102 управления уклоном. Со ссылкой на ФИГ. 8 иллюстративная система для реализации некоторых вариантов осуществления содержит вычислительное устройство общего назначения в форме компьютера 810. Компоненты компьютера 810 могут содержать, но без ограничения, устройство 820 обработки данных (которое может содержать процессор 108), системную память 830 и системную шину 821, которая связывает различные системные компоненты, включая системную память, с устройством 820 обработки данных. Системная шина 821 может быть любой из нескольких типов конструкций шины, в том числе шиной памяти или контроллером памяти, периферийной шиной и локальной шиной, использующей любую из широкого спектра шинных архитектур.
Компьютер 810 обычно содержит множество машиночитаемых носителей. Машиночитаемые носители могут быть любыми имеющимися в наличии носителями, к которым компьютер 810 может иметь доступ, в том числе как энергозависимыми, так и энергонезависимыми, съемными и несъемными носителями. В качестве примера, а не ограничения, машиночитаемые носители могут содержать компьютерный накопитель данных и средства связи. Компьютерный накопитель данных отличается от сигнала модулированных данных или модулированного несущего сигнала и не содержит его. Они содержат аппаратные накопители данных, в том числе энергозависимые и энергонезависимые, съемные и несъемные накопители, выполненные любым способом или технологией для хранения информации, такой как машиночитаемые команды, структуры данных, программные модули или другие данные. Компьютерный накопитель данных содержит, но не ограничивается этим, ОЗУ, ПЗУ, ЭСППЗУ, флэш-память или другую технологию памяти, CD-ROM, цифровые универсальные диски (DVD) или другие оптические дисковые накопители, магнитные кассеты, магнитные ленты, магнитные дисковые накопители или другие магнитные запоминающие устройства или любое другое приспособление, которое может использоваться для хранения требуемой информации, и к которому компьютер 810 может иметь доступ. Средства связи могут содержать машиночитаемые команды, структуры данных, программные модули или другие данные в транспортном механизме, в том числе любые средства доставки информации. Термин «модулированный сигнал данных» означает сигнал, одна или несколько характеристик которого установлены или изменены таким образом, чтобы кодировать информацию в сигнале.
Системная память 830 содержит компьютерный накопитель данных в виде энергозависимой и/или энергонезависимой памяти, такой как постоянное запоминающее устройство 831 (ПЗУ) и оперативное запоминающее устройство 832 (ОЗУ). Базовая система 833 ввода/вывода (BIOS), содержащая базовые подпрограммы, которые помогают передавать информацию между элементами внутри компьютера 810, например, во время запуска, обычно хранится в ПЗУ 831. ОЗУ 832 обычно содержит данные и/или программные модули, которые сразу же доступны и/или в настоящее время используются устройством 820 обработки данных. В качестве примера, но не ограничения, ФИГ. 8 иллюстрирует операционную систему 834, прикладные программы 835, другие программные модули 836 и программные данные 837.
Компьютер 810 также может содержать другой съемный/несъемный энергозависимый/энергонезависимый компьютерный накопитель данных. Только в качестве примера, на ФИГ. 8 иллюстрируется накопитель 841 на жестких дисках, который считывает с или записывает на несъемный энергонезависимый магнитный носитель, накопитель 851 на магнитных дисках, энергонезависимый магнитный диск 852, накопитель 855 на оптических дисках и энергонезависимый оптический диск 856. Накопитель 841 на жестких дисках обычно подключается к системной шине 821 через интерфейс несъемного запоминающего устройства, такого как интерфейс 840, а накопитель 851 на магнитных дисках и накопитель 855 на оптических дисках обычно подключаются к системной шине 821 посредством интерфейса съемного запоминающего устройства, такого как интерфейс 850.
Альтернативно или в дополнение, описанная в данном документе функциональность, может быть выполнена, по меньшей мере, частично, одним или несколькими аппаратными логическими компонентами. Например, и без ограничения, иллюстративные типы аппаратных логических компонентов, которые могут использоваться, содержат программируемые логические интегральные схемы (FPGA), программно-зависимые интегральные схемы (например, ASIC), стандартные программные продукты (например, ASSP), системы специализированных однокристальных микропроцессоров (SOC), сложные программируемые логические интегральные схемы (CPLD) и т.д.
Дисководы и связанный с ними компьютерный накопитель данных, рассмотренный выше и проиллюстрированный на ФИГ. 8, обеспечивают хранение машиночитаемых команд, структур данных, программных модулей или других данных для компьютера 810. На ФИГ. 8, например, проиллюстрирован накопитель 841 на жестких дисках для хранения операционной системы 844, прикладных программ 845, других программных модулей 846 и программных данных 847. Следует отметить, что эти компоненты могут быть такими же или отличаться от операционной системы 834, прикладных программ 835, других программных модулей 836 и программных данных 837.
Пользователь может вводить команды и информацию в компьютер 810 через устройства ввода, такие как клавиатура 862, микрофон 863 и указывающее устройство 861, такое как мышь, трекбол или сенсорная панель. Другие устройства ввода (не показаны) могут содержать джойстик, игровую панель, спутниковую антенну, сканер или тому подобное. Эти и другие устройства ввода часто подключают к процессору 820 через интерфейс 860 пользовательского ввода, который связан с системной шиной, но можно подключать другим интерфейсом и структурами шины. Визуальный индикатор 891 или устройство отображения другого типа также подключено к системной шине 821 через интерфейс, такой как видеоинтерфейс 890. В дополнение к монитору компьютеры могут также содержать другие периферийные устройства вывода, такие как динамики 897 и принтер 896, которые можно подключать через интерфейс 895 периферийного устройства вывода.
Компьютер 810 работает в сетевой среде с использованием логических соединений (таких как локальная сеть - LAN или глобальная сеть WAN) с одним или несколькими удаленными компьютерами, такими как удаленный компьютер 880.
При использовании в сетевой среде локальной сети (LAN) компьютер 810 подключают к локальной сети 871 через сетевой интерфейс или адаптер 870. При использовании в сетевой среде глобальной сети (WAN) или в вариантах осуществления, при которых компьютер 810 использует беспроводную связь, адаптер 870 выполняют с возможностью связи в соответствии с протоколом беспроводной связи, таким как протокол связи WiFi. Кроме того, можно использовать более одного адаптера 870, чтобы позволить компьютеру 810 осуществлять связь в соответствии с другими протоколами беспроводной связи, такими как Bluetooth или другие. В сетевой среде программные модули могут храниться на удаленном запоминающем устройстве. На ФИГ. 8, например, показано, что удаленные прикладные программы 885 могут находиться на удаленном компьютере 880.
Следует также отметить, что различные варианты осуществления, описанные в данном документе, могут комбинироваться по-разному. То есть части одного или нескольких вариантов осуществления могут быть объединены с частями одного или нескольких других вариантов осуществления. Все это предусмотрено в настоящем документе.
Пример 1 представляет собой способ калибровки системы управления уклоном, способ включает:
размещение смартфона на первом определенном месте калибровки рабочей машины;
инициирование смартфона на определение наклона первого определенного места калибровки относительно силы тяжести;
размещение смартфона на втором определенном месте калибровки грейдера;
инициирование смартфона на определение наклона второго определенного места калибровки относительно силы тяжести;
автоматическую передачу информации о наклоне первого и второго определенных мест калибровки в систему управления уклоном; и
использование наклона первого и второго определенных мест калибровки для последующего управления уклоном.
Пример 2 представляет собой способ калибровки системы управления уклоном по любому или всем предыдущим примерам, в которых для автоматической передачи информации о наклоне первого и второго определенных мест калибровки используется беспроводная связь.
Пример 3 представляет собой способ калибровки системы управления уклоном по любому или всем предыдущим примерам, в которых беспроводная связь имеет частоту около 2,4 ГГц.
Пример 4 представляет собой способ калибровки системы управления уклоном по любому или всем предыдущим примерам, в которых беспроводная связь соответствует спецификации Bluetooth.
Пример 5 представляет собой способ калибровки системы управления уклоном по любому или всем предыдущим примерам, в которых беспроводная связь соответствует спецификации WiFi.
Пример 6 представляет собой способ калибровки системы управления уклоном по любому или всем предыдущим примерам, в которых используется спецификация WiFi IEEE 802.11.
Пример 7 представляет собой мобильное устройство, содержащее:
процессор;
дисплей, подключенный к процессору и выполненный с возможностью обеспечения вывода на дисплей;
приемопередатчик беспроводной связи, соединенный с процессором и выполненный с возможностью беспроводной связи с системой управления уклоном;
датчик наклона/уклона, функционально связанный с процессором и выполненный с возможностью обнаружения наклона/уклона мобильного устройства относительно силы тяжести;
запоминающее устройство, соединенное с процессором и хранящее команды, которые при исполнении процессором предоставляют приложение калибровки уклона;
приложение калибровки уклона, выполненное с возможностью:
приема пользовательского ввода, подтверждающего размещение мобильного устройства на первом определенном месте калибровки;
в ответ на получение пользовательского ввода, подтверждающего размещение на первом определенном месте калибровки, определения наклона первого определенного места калибровки посредством датчика наклона/уклона;
приема пользовательского ввода, подтверждающего размещение мобильного устройства на втором определенном месте калибровки;
в ответ на получение пользовательского ввода, подтверждающего размещение на втором определенном месте калибровки, определения наклона второго определенного места калибровки посредством датчика наклона/уклона; и
автоматической передачи первого и второго обнаруженного наклона в систему управления уклоном посредством приемопередатчика беспроводной связи.
Пример 8 представляет собой мобильное устройство по любому или всем предыдущим примерам и дополнительно содержит дисплей, соединенный с процессором и выполненный с возможностью обеспечения вывода на дисплей, приложение калибровки уклона, выполненное с возможностью обеспечения вывода на экран команды пользователю переместить мобильное устройство на второе определенное место калибровки.
Пример 9 представляет собой мобильное устройство по любому или всем предыдущим примерам, в которых беспроводной приемопередатчик выполнен с возможностью связи с системой управления уклоном с использованием служб сотовой связи.
Пример 10 представляет собой мобильное устройство по любому или всем предыдущим примерам, в которых беспроводной приемопередатчик выполнен с возможностью связи с системой управления уклоном на частоте около 2.4 ГГц.
Пример 11 представляет собой мобильное устройство по любому или всем предыдущим примерам, в которых беспроводной приемопередатчик выполнен с возможностью связи с системой управления уклоном с использованием спецификации Bluetooth.
Пример 12 представляет собой мобильное устройство по любому или всем предыдущим примерам, в которых беспроводной приемопередатчик выполнен с возможностью связи с системой управления уклоном с использованием спецификации WiFi.
Пример 13 представляет собой мобильное устройство по любому или всем предыдущим примерам, в которых приложение калибровки уклона дополнительно выполнено с возможностью:
приема пользовательского ввода, подтверждающего размещение мобильного устройства на третьем определенном месте калибровки;
в ответ на получение пользовательского ввода, подтверждающего размещение на третьем определенном месте калибровки, определения наклона третьего определенного места калибровки посредством датчика наклона/уклона; и
автоматической передачи третьего обнаруженного наклона в систему управления уклоном посредством приемопередатчика беспроводной связи.
Пример 14 представляет собой рабочую машину, содержащую:
рабочий нож, выполненный с возможностью задействовать поверхность земли, причем рабочий нож имеет регулируемый наклон;
систему управления уклоном, имеющую инерциальный измерительный блок, причем система управления уклоном функционально связана с рабочим ножом для управления регулируемым наклоном рабочего ножа; и
модуль беспроводной связи, выполненный с возможностью получения информации об обнаруженном наклоне относительно множества определенных мест калибровки на рабочем ноже и калибровки инерциального измерительного блока на основе полученной информации об обнаруженном наклоне.
Пример 15 представляет собой рабочую машину по любому или всем предыдущим примерам, в которых модуль беспроводной связи выполнен с возможностью приема со смартфона информации об обнаруженном наклоне.
Пример 16 представляет собой рабочую машину по любому или всем предыдущим примерам, в которых каждое определенное место калибровки на рабочем ноже имеет элементы, которые взаимодействуют с несущим устройством, выполненным с возможностью приема смартфона.
Пример 17 представляет собой рабочую машину по любому или всем предыдущим примерам, в которых несущее устройство имеет прямоугольную форму и выполнено с возможностью правильного прикрепления смартфона к рабочей машине.
Пример 18 представляет собой рабочую машину по любому или всем предыдущим примерам, в которых множество определенных мест калибровки включают три места калибровки.
Пример 19 представляет собой рабочую машину по любому или всем предыдущим примерам, в которых модуль беспроводной связи выполнен с возможностью передачи информации на частоте около 2.4 ГГц.
Хотя изобретение было описано на языке, предназначенном для конструктивных признаков и/или этапов способа, следует понимать, что изобретение, определенное в прилагаемой формуле изобретения, не ограничено обязательно характерными признаками или этапами, описанными выше. Скорее, характерные признаки и этапы, описанные выше, раскрыты как иллюстративные формы реализации формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ВНУТРЕННЕГО МЕСТОПОЛОЖЕНИЯ | 2016 |
|
RU2696603C1 |
| СЪЕМНОЕ УСТРОЙСТВО ОБРАБОТКИ, ХРАНЕНИЯ И ВНЕШНЕГО ВВОДА ДАННЫХ ДЛЯ МОБИЛЬНЫХ УСТРОЙСТВ | 2017 |
|
RU2733070C2 |
| СИСТЕМА ДЛЯ УДАЛЕННОГО УПРАВЛЕНИЯ УПРАВЛЯЕМЫМ УСТРОЙСТВОМ | 2014 |
|
RU2673471C2 |
| ПЕРЕНАПРАВЛЕНИЕ К ЗАПРАВОЧНОЙ СТАНЦИИ | 2015 |
|
RU2705663C1 |
| СИСТЕМА И СПОСОБ УДАЛЕННОГО ВЗАИМОДЕЙСТВИЯ С ИЗДЕЛИЕМ, ИМЕЮЩИМ ПРОЦЕССОР | 2013 |
|
RU2645177C2 |
| ДОПОЛНЕНИЕ МЕСТОПОЛОЖЕНИЯ ПО GPS И ВОСПРОИЗВЕДЕНИЕ ПРИ ПЕРЕБОЕ В РАБОТЕ | 2021 |
|
RU2818744C1 |
| ОСВЕТИТЕЛЬНОЕ ПРИМЕНЕНИЕ ДЛЯ ИНТЕРАКТИВНОГО ЭЛЕКТРОННОГО УСТРОЙСТВА | 2013 |
|
RU2635230C2 |
| Системы и способы создания и обновления динамических электронных задач на электронной доске сообщений | 2019 |
|
RU2793963C2 |
| УСТРОЙСТВО И СПОСОБ АУДИО-ВИЗУАЛЬНОГО ПОИСКА И ПРОСМОТРА ИНТЕРФЕЙСА, МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ | 2009 |
|
RU2453899C1 |
| ПЛАТФОРМА ПЕРСОНАЛЬНЫХ ЛОГИЧЕСКИХ ВОЗМОЖНОСТЕЙ | 2015 |
|
RU2691223C2 |
Изобретение относится к средствам калибровки системы управления уклоном. Технический результат заключается в уменьшении ошибок при калибровке угла наклона рабочей машины. Размещают смартфон на первом определенном месте калибровки рабочей машины. Инициируют смартфон на определение наклона первого определенного места калибровки относительно силы тяжести. Размещают смартфон на втором определенном месте калибровки рабочей машины. Инициируют смартфон на определение наклона второго определенного места калибровки относительно силы тяжести. Осуществляют автоматическую передачу информации о наклоне первого и второго определенных мест калибровки в систему управления уклоном. Используют наклон первого и второго определенных мест калибровки для последующего управления уклоном. 3 н. и 17 з.п. ф-лы, 11 ил.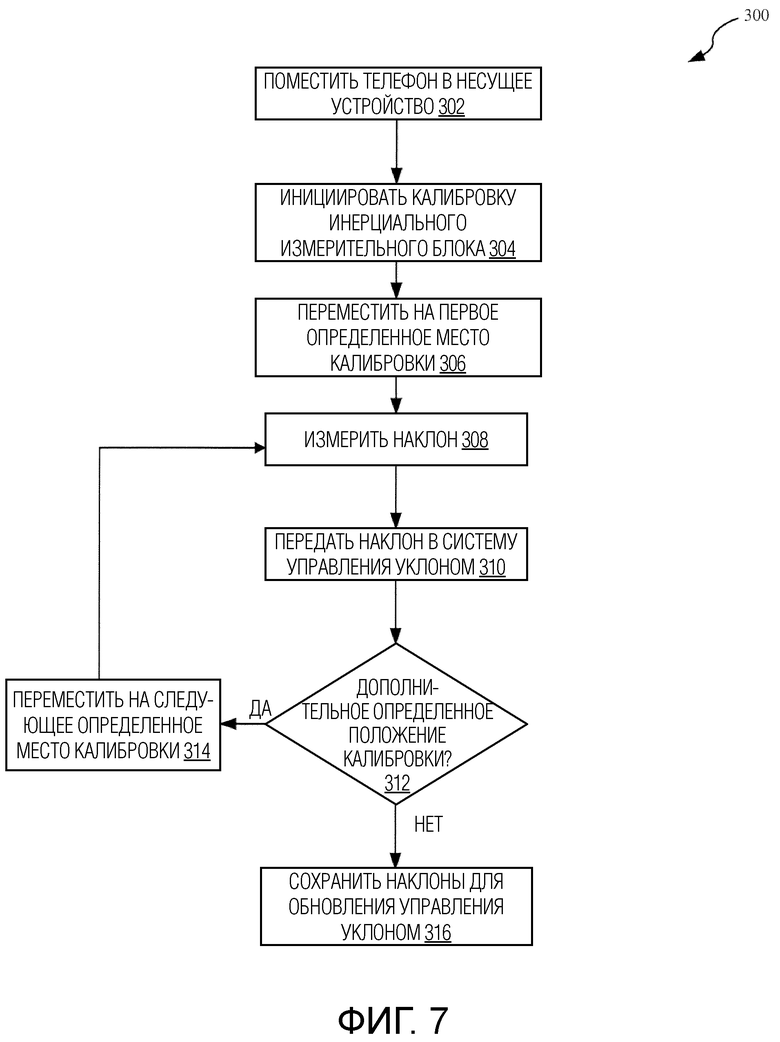
1. Способ калибровки системы управления уклоном, включающий:
размещение смартфона на первом определенном месте калибровки рабочей машины;
инициирование смартфона на определение наклона первого определенного места калибровки относительно силы тяжести;
размещение смартфона на втором определенном месте калибровки рабочей машины;
инициирование смартфона на определение наклона второго определенного места калибровки относительно силы тяжести;
автоматическую передачу информации о наклоне первого и второго определенных мест калибровки в систему управления уклоном; и
использование наклона первого и второго определенных мест калибровки для последующего управления уклоном.
2. Способ по п. 1, в котором для автоматической передачи наклона первого и второго определенных мест калибровки используют беспроводную связь.
3. Способ по п. 2, в котором беспроводная связь имеет частоту около 2.4 ГГц.
4. Способ по п. 2, в котором используют беспроводную связь в соответствии со спецификацией Bluetooth.
5. Способ по п. 3, в котором используют беспроводную связь в соответствии со спецификацией WiFi.
6. Способ по п. 1, в котором используют беспроводную связь в соответствии со спецификацией WiFi.
7. Способ по п. 6, в котором используют спецификацию WiFi IEEE 802.11.
8. Мобильное устройство для обнаружения наклона и передачи его в систему управления уклоном, содержащее:
процессор;
дисплей, подключенный к процессору и выполненный с возможностью обеспечения вывода на дисплей;
приемопередатчик беспроводной связи, соединенный с процессором и выполненный с возможностью беспроводной связи с системой управления уклоном;
датчик наклона/уклона, функционально связанный с процессором и выполненный с возможностью обнаружения наклона/уклона мобильного устройства относительно силы тяжести;
запоминающее устройство, соединенное с процессором и хранящее команды, которые при исполнении процессором предоставляют приложение калибровки уклона;
причем приложение калибровки уклона выполнено с возможностью:
приема пользовательского ввода, подтверждающего размещение мобильного устройства на первом определенном месте калибровки;
в ответ на получение пользовательского ввода, подтверждающего размещение на первом определенном месте калибровки, определения наклона первого определенного места калибровки посредством датчика наклона/уклона;
приема пользовательского ввода, подтверждающего размещение мобильного устройства на втором определенном месте калибровки;
в ответ на получение пользовательского ввода, подтверждающего размещение на втором определенном месте калибровки, определения наклона второго определенного места калибровки посредством датчика наклона/уклона; и
автоматической передачи первого и второго обнаруженного наклона в систему управления уклоном посредством приемопередатчика беспроводной связи.
9. Мобильное устройство по п. 8, дополнительно содержащее дисплей, соединенный с процессором и выполненный с возможностью обеспечения вывода на дисплей; приложение калибровки уклона, выполненное с возможностью обеспечения вывода на дисплей, подающее команду пользователю переместить мобильное устройство во второе определенное место калибровки.
10. Мобильное устройство по п. 8, в котором беспроводной приемопередатчик выполнен с возможностью связи с системой управления уклоном, используя службы сотовой связи.
11. Мобильное устройство по п. 8, в котором беспроводной приемопередатчик выполнен с возможностью связи с системой управления уклоном на частоте около 2.4 ГГц.
12. Мобильное устройство по п. 11, в котором беспроводной приемопередатчик выполнен с возможностью связи с системой управления уклоном, используя спецификацию Bluetooth.
13. Мобильное устройство по п. 11, в котором беспроводной приемопередатчик выполнен с возможностью связи с системой управления уклоном, используя спецификацию WiFi.
14. Мобильное устройство по п. 11, в котором приложение калибровки уклона дополнительно выполнено с возможностью:
приема пользовательского ввода, подтверждающего размещение мобильного устройства на третьем определенном месте калибровки;
в ответ на получение пользовательского ввода, подтверждающего размещение на третьем определенном месте калибровки, определения наклона третьего определенного места калибровки посредством датчика наклона/уклона; и
автоматической передачи третьего обнаруженного уклона в систему управления уклоном посредством приемопередатчика беспроводной связи.
15. Рабочая машина на гусеничном ходу, содержащая:
рабочий нож, выполненный с возможностью взаимодействия с поверхностью земли, причем рабочий нож имеет регулируемый наклон;
систему управления уклоном, имеющую инерциальный измерительный блок, причем система управления уклоном функционально связана с рабочим ножом для управления регулируемым уклоном рабочего ножа; и
модуль беспроводной связи, выполненный с возможностью получения информации об обнаруженном наклоне относительно множества определенных мест калибровки на рабочем ноже и калибровки инерциального измерительного блока на основе полученной информации об обнаруженном наклоне.
16. Рабочая машина по п. 15, в которой модуль беспроводной связи выполнен с возможностью приема со смартфона информации об обнаруженном наклоне.
17. Рабочая машина по п. 15, в которой каждое определенное место калибровки на рабочем ноже имеет элементы, которые взаимодействуют с несущим устройством, выполненным с возможностью приема смартфона.
18. Рабочая машина по п. 17, в которой несущее устройство имеет прямоугольную форму и выполнено с возможностью правильного прикрепления смартфона к рабочей машине.
19. Рабочая машина по п. 18, в которой множество определенных мест калибровки содержит три места калибровки.
20. Рабочая машина по п. 15, в которой модуль беспроводной связи выполнен с возможностью передачи информации на частоте около 2.4 ГГц.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| US 9348327 B2, 23.05.2016 | |||
| СПОСОБ, АППАРАТ И ТЕРМИНАЛ ДЛЯ ИЗМЕРЕНИЯ УГЛА | 2014 |
|
RU2599178C2 |

