ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка испрашивает приоритет в соответствии с разделом 119 35 U.S.C. по предварительным заявкам на патент США №№ 62/704,284, 62/704,285, 63/018,833, 63/019,032, все из которых были поданы 1 мая 2020 г. Предварительные заявки на патент полностью включены в настоящий документ посредством ссылки, включая, без ограничений, описание, формулу изобретения и реферат, а также любые фигуры, таблицы, приложения или графические материалы к ним.
ОБЛАСТЬ ТЕХНИКИ
Аспекты настоящего изобретения относятся в целом к аппарату, системам и соответствующему способу использования в по меньшей мере сельскохозяйственной отрасли. Более конкретно, но не исключительно, аппарат, способы и системы включают в себя дополнение, добавление и/или замену информации глобальной системы позиционирования (GPS) для использования в сельскохозяйственных операциях.
УРОВЕНЬ ТЕХНИКИ
Сельскохозяйственная сеялка для пропашных культур представляет собой машину, предназначенную для точного распределения семян в почве. Сеялка для пропашных культур по существу содержит горизонтальный брус для навешивания сменных рабочих органов, прикрепленный к узлу сцепки для буксировки за трактором или другим орудием. Высевающие секции, содержащие дозаторы семян, крепятся к брусу для навешивания сменных рабочих органов. В различных конфигурациях семена могут храниться в отдельных бункерах на каждой высевающей секции или храниться в центральном бункере и доставляться к высевающим секциям по мере необходимости. Высевающие секции включают в себя почвообрабатывающие инструменты для раскрытия и закрытия семенной борозды и систему дозирования семян для распределения семян по семенной борозде.
Точное земледелие ориентируется на очень точное и своевременное знание физического местоположения. Урожайность может быть напрямую связана с тем, насколько точно может быть соблюдено расстояние между семенами. На сегодняшний день традиционная GPS имеет ограничения по точности, которые необходимо дополнить данными из других источников. Дополнительно, из-за препятствий, атмосферных явлений или других воздействий перебои в получении данных GPS представляют собой проблему для сельскохозяйственных операций. Такие ограничения в GPS, включая возможные перебои в работе, могут влиять на текущую сельскохозяйственную операцию для одного орудия, а также могут влиять на несколько орудий в те же или разных местоположениях, которые зависят от информации, предоставляемой GPS. Недостаток информации может приводить к проблемам с уплотнением, чрезмерной посадкой, пропущенной посадкой и другим проблемам, которые могут влиять на урожайность культуры.
Таким образом, в данной области техники существует потребность в системах, способах и/или аппарате, улучшающих применение GPS в сельскохозяйственных операциях, включая дополнение данных GPS и замену GPS во время перебоя в работе.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Следующие цели, признаки, преимущества, аспекты и/или варианты реализации не являются исчерпывающими и не ограничивают изобретение в целом. Ни один вариант реализации не должен обеспечивать все без исключения цели, признаки или преимущества. Любые из целей, признаков, преимуществ, аспектов и/или вариантов реализации, раскрытых в настоящем документе, могут быть интегрированы друг с другом либо полностью, либо частично.
Следовательно, основной целью, признаком и/или преимуществом любого из аспектов любого из раскрытых в настоящем документе вариантов реализации является улучшение или преодоление недостатков в данной области техники.
Другой целью, признаком и/или преимуществом любого из аспектов любого из раскрытых в настоящем документе вариантов реализации является дополнение систем, способов и/или аппарата для обнаружения местоположения, связанных с сельскохозяйственными орудиями.
Еще одной целью, признаком и/или преимуществом любого из аспектов любого из раскрытых в настоящем документе вариантов реализации является дополнение глобальной системы позиционирования (GPS) буксирующего транспортного средства и/или буксируемого орудия.
Еще одной целью, признаком и/или преимуществом любого из аспектов любого из раскрытых в настоящем документе вариантов реализации является обеспечение системы и/или способа предоставления информации о местоположении или позиционировании буксирующего транспортного средства и/или буксируемого сельскохозяйственного орудия, когда произошел перебой в работе или нарушение работы GPS.
Еще одной дополнительной целью, признаком и/или преимуществом любого из аспектов любого из раскрытых в настоящем документе вариантов реализации является обеспечение абсолютного позиционирования буксирующего транспортного средства и буксируемого сельскохозяйственного орудия с применением комбинации GPS и инерциального измерительного блока (IMU).
Еще одной дополнительной целью, признаком и/или преимуществом любого из аспектов любого из раскрытых в настоящем документе вариантов реализации является применение информации о местоположении/позиционировании от IMU и другой информации для замены информации, предоставляемой GPS во время перебоя в работе или нарушения работы.
Еще одной дополнительной целью, признаком и/или преимуществом любого из аспектов любого из раскрытых в настоящем документе вариантов реализации является совместное позиционирование комбинации буксирующего транспортного средства и буксируемого сельскохозяйственного орудия со вторым местоположением или буксирующим транспортным средством и буксируемым сельскохозяйственным орудием.
Еще одной дополнительной целью, признаком и/или преимуществом любого из аспектов любого из раскрытых в настоящем документе вариантов реализации является включение одного или более беспилотных автономных транспортных средств (UV) для дополнения местоположения буксирующего транспортного средства и буксируемого сельскохозяйственного орудия.
Еще одной целью, признаком и/или преимуществом любого из аспектов любого из раскрытых в настоящем документе вариантов реализации является хранение и доступ к сельскохозяйственным данным в местоположении, удаленном от сельскохозяйственного орудия, например, в облачной системе хранения.
Компьютеризированные способы и системы, раскрытые в настоящем документе, можно использовать в самых разных сельскохозяйственных операциях, включая посадку, обработку почвы, прессование, сбор урожая, опрыскивание, транспортировку, культивацию, боронование, вспашку, внесение удобрений, транслирование, погрузку, разгрузку и т. п. Некоторые аспекты раскрытых в настоящем документе компьютеризированных способов и систем могут даже находить применение в других отраслях, в значительной степени зависящих от связи и/или навигации, таких как автомобильная, морская и/или аэрокосмическая отрасли.
Еще одной дополнительной целью, признаком и/или преимуществом является поддержка Интернета вещей (IoT) и других сред, в которых информация, данные или т. п. передаются эффективно с более высокой скоростью и более широкой полосой пропускания.
Еще одной дополнительной целью, признаком и/или преимуществом является обеспечение безопасных, экономичных и надежных результатов для фермеров, использующих раскрытые в настоящем документе компьютеризированные способы.
Еще одной дополнительной целью, признаком и/или преимуществом является отображение аспектов, раскрытых в настоящем документе компьютеризированных способов с отчетливыми эстетическими признаками, включая, но не ограничиваясь ими, карты, таблицы и другой текст или изображения, которые в ином случае улучшают взаимодействие с электроникой сельскохозяйственного орудия. Например, взаимодействие с пользователем может быть улучшено или иным образом дополнительно облегчено посредством графического пользовательского интерфейса, который предоставляет пользователю интуитивно понятные элементы управления и/или автоматически предупреждает оператора сельскохозяйственного орудия о потенциальных проблемах и/или предлагает оператору выполнить ручной ввод, например, когда потенциальные проблемы не могут быть разрешены автоматически. В качестве другого примера, графические пользовательские интерфейсы могут быть настроены интуитивно, например, путем сравнения, и одновременно, например, в компактном пространстве, чтобы отображать более чем один набор данных.
В соответствии с некоторыми аспектами настоящего изобретения сельскохозяйственная система содержит сельскохозяйственное орудие, выполненное с возможностью осуществления по меньшей мере одной сельскохозяйственной операции на участке, глобальную систему позиционирования (GPS), связанную с сельскохозяйственным орудием для предоставления информации о местоположении для по меньшей мере одной сельскохозяйственной операции на участке, при этом информация о местоположении относится к событию по меньшей мере одной сельскохозяйственной операции, и систему дополнения GPS, связанную с сельскохозяйственным орудием, при этом система дополнения GPS дополняет GPS или заменяет GPS во время перебоя в работе GPS.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации система дополнения GPS содержит совокупность устройств дополнения GPS.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации совокупность устройств дополнения GPS содержат один или более датчиков, лидар, радар, спидометры, устройства направления, инерциальные измерительные блоки, камеры, акселерометры, гироскопы, магнитометры, другие известные типы датчиков положения, устройства расчета погрешности (например, устройства для расчета ухода тактовой частоты, эфемерных и/или ионосферных задержек) и/или любые другие подходящие/полезные радионавигационные компоненты.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации система дополнения GPS содержит инерциальный измерительный блок.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации беспилотное транспортное средство (UV) связано с сельскохозяйственным орудием.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации UV является частью системы дополнения GPS.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации UV содержит беспилотный летательный аппарат (БПЛА).
В соответствии с любыми аспектами любого из раскрытых вариантов реализации по меньшей мере одна сельскохозяйственная операция включает в себя одно или более из посадки, обработки почвы, прессования, сбора урожая, опрыскивания, транспортировки и культивации.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации событие по меньшей мере одной сельскохозяйственной операции включает в себя одно или более из посадки семян, опрыскивания местоположения, сбора культуры, проезда в местоположении и укладки кипы.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации включена система связи для обмена информацией с другим сельскохозяйственным орудием.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации процессор связан с сельскохозяйственным орудием.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации процессор дает команду на выполнение или невыполнение по меньшей мере одной сельскохозяйственной операции.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации процессор связан с GPS и системой дополнения GPS, при этом процессор может: использовать информацию как от GPS, так и от системы дополнения GPS, чтобы обеспечить дополненное местоположение; или использовать информацию от системы дополнения GPS, когда GPS недоступна, чтобы продолжать предоставлять информацию о местоположении.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации система содержит дисплей, отображающий по меньшей мере одно из информации о местоположении от GPS, объединенной информации о местоположении от GPS и системы дополнения GPS и информации о местоположении от системы дополнения GPS.
В соответствии с дополнительными аспектами и/или вариантами реализации, способ получения местоположения события сельскохозяйственной операции, выполняемой сельскохозяйственной машиной, включает в себя получение информации о местоположении с помощью GPS, получение информации о местоположении с помощью системы дополнения GPS и использование информации о местоположении с использованием информации о местоположении как от GPS, так и от системы дополнения GPS для обеспечения местоположения события, или использование информации о местоположении от системы дополнения GPS, когда GPS недоступна, для обеспечения местоположения события.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации способ включает в себя отображение местоположения события на пользовательском дисплее.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации, когда GPS недоступна, отображение местоположения события на основе системы дополнения GPS отличается от отображения местоположения с использованием как GPS, так и системы дополнения GPS.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации способ включает в себя сохранение местоположения события в запоминающем устройстве с указанием даты и времени.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации способ включает в себя соединение беспилотного транспортного средства с сельскохозяйственной машиной для содействия в получении местоположения события.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации беспилотное транспортное средство включает беспилотный летательный аппарат.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации способ включает в себя совместное использование местоположения события со второй сельскохозяйственной машиной.
В соответствии с любыми аспектами любого из раскрытых вариантов реализации контроллер второй сельскохозяйственной машины использует местоположение события для управления работой второй сельскохозяйственной машины.
В соответствии с дополнительными аспектами и/или вариантами реализации система определения местоположения сельскохозяйственного события, выполняемого сельскохозяйственной машиной, содержит глобальную систему позиционирования (GPS) и систему дополнения GPS, при этом система дополнения GPS содержит беспилотный летательный аппарат (БПЛА), связанный с сельскохозяйственной машиной, причем указанный БПЛА сообщает свое местоположение сельскохозяйственной машине, чтобы добавить местоположение, определенное с помощью GPS, или чтобы быть использованным вместо GPS, когда GPS недоступна.
Эти и/или другие цели, признаки, преимущества, аспекты и/или варианты реализации станут очевидны для специалистов в данной области техники после просмотра следующих кратких и подробных описаний графических материалов.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
На Фиг. 1 представлен вид сбоку приведенного в качестве примера трактора.
На Фиг. 2 представлен вид в перспективе сельскохозяйственной сеялки.
На Фиг. 3 представлено схематическое изображение сельскохозяйственной машины, содержащей буксирующее транспортное средство и соединенное с ним орудие.
На Фиг. 4 представлено схематическое изображение системы дополнения GPS в соответствии с аспектами настоящего раскрытия и/или изобретения.
На Фиг. 5 представлена схема, показывающая сельскохозяйственную машину в поле.
На Фиг. 6 представлена схема компонентов системы, в которой информация совместно используется между несколькими сельскохозяйственными машинами и/или устройствами.
На Фиг. 7А представлена схема, показывающая несколько сельскохозяйственных машин на одном поле.
На Фиг. 7B представлено приведенное в качестве примера изображение экрана одной из сельскохозяйственных машин, показанных на Фиг. 7А.
На Фиг. 8A представлена схема сельскохозяйственной машины в поле, которая потеряла информацию GPS.
На Фиг. 8B представлено приведенное в качестве примера изображение экрана сельскохозяйственной машины, показанной на Фиг. 8А.
На Фиг. 9 представлена блок-схема, показывающая способ работы системы определения местоположения сельскохозяйственной машины.
На Фиг. 10A представляет собой вид БПЛА, используемого в операции с сельскохозяйственной машиной, для содействия в определении местоположения.
На Фиг. 10B представлен другой вид БПЛА и сельскохозяйственной машины.
На Фиг. 10C представлен еще один вид БПЛА и сельскохозяйственной машины в соответствии с дополнительными аспектами системы.
На Фиг. 10D представлен вид БПЛА и сельскохозяйственной машины, когда БПЛА не используется в настоящий момент.
На Фиг. 11 схематично проиллюстрирована аппаратная среда, на которой подчеркнуты вычислительные компоненты приведенной в качестве примера системы интеллектуального управления, такие как планшет с сенсорным дисплеем.
Проиллюстрировано и подробно описано несколько вариантов реализации, причем одинаковые ссылочные позиции представляют одинаковые компоненты на нескольких видах. Графические материалы представлены в качестве примера и могут быть показаны без соблюдения масштаба, если не указано иное. Кроме того, следует отметить, что любой из аспектов любой из фигур можно использовать с любой другой фигурой, не включающей указанный аспект, и при этом сохраняется сущность изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Следующие определения и вводные сведения приведены для облегчения понимания вариантов реализации и/или их аспектов. Если не указано иное, все используемые в настоящем документе технические и научные термины имеют то же значение, которое обычно понимает обычный специалист в области техники, к которой относятся варианты реализации данного изобретения.
Термины в единственном числе включают в себя ссылки как в единственном, так и во множественном числе.
Термин «или» является синонимом «и/или» и означает любой элемент или комбинацию элементов определенного перечня.
Используемые в настоящем документе термины «изобретение» или «настоящее изобретение» не предназначены для обозначения какого-либо одного варианта реализации конкретного изобретения, а охватывают все возможные варианты реализации, как изложено в описании и формуле изобретения.
Используемый в настоящем документе термин «около» относится к незначительным вариациям числовых величин по отношению к любой количественно измеряемой переменной. Обычному специалисту в данной области техники будет понятно, что непреднамеренная ошибка может возникнуть, например, из-за использования обычных методов измерения или оборудования или из-за различий в производстве, источнике или чистоте компонентов. Формула изобретения включает в себя эквиваленты величин, независимо от того, изменены они или нет термином «около».
Термин «выполненный с возможностью» описывает конструкцию, способную выполнять задачу или принимать определенную конфигурацию. Термин «выполненный с возможностью» может использоваться взаимозаменяемо с другими аналогичными фразами, такими как «сконструированный», «размещенный», «адаптированный», «изготовленный» и т. п.
Термины, характеризующие последовательный порядок, положение и/или ориентацию, упоминаются в соответствии с представленными видами. Если в контексте не указано иное, эти термины не имеют ограничивающего характера.
В средствах связи и вычислительных средах машиночитаемый носитель представляет собой носитель, способный хранить данные в формате, считываемом механическим устройством. Термин «энергонезависимый» используется в настоящем документе для обозначения машиночитаемых носителей (CRM), которые хранят данные в течение коротких периодов времени или при наличии питания, таких как запоминающее устройство.
По существу энергонезависимый машиночитаемый носитель работает под управлением операционной системы, хранящейся в запоминающем устройстве. Энергонезависимый машиночитаемый носитель реализует компилятор, который позволяет программному приложению, написанному на языке программирования, таком как COBOL, C++, FORTRAN или любом другом известном языке программирования, преобразовываться в код, считываемый центральным процессором. После завершения центральный процессор осуществляет доступ к данным, хранящимся в запоминающем устройстве энергонезависимого машиночитаемого носителя, и манипулирует ими, используя отношения и логику, заданные программным приложением и сгенерированные с помощью компилятора.
В одном варианте реализации программное приложение и компилятор материально реализованы в машиночитаемом носителе. Когда команды считываются и выполняются энергонезависимым машиночитаемым носителем, энергонезависимый машиночитаемый носитель выполняет этапы, необходимые для реализации и/или использования настоящего изобретения. Программное приложение, команды по эксплуатации и/или встроенное программное обеспечение (полупостоянное программное обеспечение, запрограммированное в постоянном запоминающем устройстве) также могут быть материально реализованы в запоминающем устройстве и/или устройствах передачи данных, таким образом превращая программное приложение в продукт или изделие в соответствии с настоящим изобретением.
Один или более описанных в настоящем документе вариантов реализации могут быть реализованы с использованием программных модулей, механизмов или компонентов. Программный модуль, механизм или компонент могут включать в себя программу, подпрограмму, часть программы, или программный компонент, или аппаратный компонент, способный выполнять одну или более заявленных задач или функций. Модуль или компонент может существовать на аппаратном компоненте независимо от других модулей или компонентов. В альтернативном варианте модуль или компонент может представлять собой совместно используемый элемент или процесс других модулей, программ или машин.
Механические, электрические, химические, процедурные и/или другие изменения, очевидные для обычного специалиста в данной области техники, могут быть выполнены без отступления от сущности и объема настоящего изобретения.
На Фиг. 1 показан трактор 100, используемый для передачи высокого крутящего момента в целях буксировки техники, используемой в сельском хозяйстве. Трактор 100 содержит кабину 101 с рулевым колесом 102 и сиденьем 103 для оператора. Трактор 100 также содержит раму 104 транспортного средства, на которой размещен двигатель, расположенный рядом с передней осью трактора 100 и перед кабиной 101. Кабина 101 и рама 104 транспортного средства конструктивно поддерживаются шасси 105 трактора, которое крепится к задним ведущим колесам 106 и передним направляющим колесам 107, причем указанные передние направляющие колеса 107 функционально соединены с рулевым колесом 102. Выхлопная труба 108 позволяет угарному газу выходить из трактора 100 во время работы двигателя. Сцепка 109 трактора обеспечивает соединение между сельскохозяйственной техникой и трактором 100.
На Фиг. 2 показана сеялка 110, используемая для контролируемого посева и удобрения семян. Например, сеялка 110, показанная на Фиг. 2, содержит дышло 112, которое может быть телескопическим. Дышло 112 содержит первый конец 114 со сцепкой 116 орудия для крепления к буксирующему транспортному средству, такому как трактор 100. Противоположный конец дышла 112 прикреплен к раме или центральному брусу 118 для навешивания сменных рабочих органов. Тяговые соединения 120 подсоединены между центральным брусом 118 для навешивания сменных рабочих органов и дышлом 112 и используются вместе в сочетании со складывающими исполнительными устройствами 122 для складывания вперед центрального бруса 118 для навешивания сменных рабочих органов. Следовательно, дышло 112 может представлять собой телескопическое дышло, поскольку оно может выдвигаться или двигаться, чтобы обеспечить складывание вперед центрального бруса 118 для навешивания сменных рабочих органов. Сеялка 110 также может быть подъемно-поворотной, складывающейся сзади, вертикально складывающейся, узкорядной или представлять собой по существу любой другой тип сеялки.
Центральный брус 118 для навешивания сменных рабочих органов содержит первое и второе крылья 130, 134, отходящие от него. Центральный брус 118 для навешивания сменных рабочих органов содержит центральные бункеры 124, которые содержат семена или другие гранулы/частицы, используемые при посадке. Совокупность транспортных колес 128 также соединены с центральным брусом 118 для навешивания сменных рабочих органов. Первое и второе крылья 130, 134 по существу представляют собой просто отображения друг друга. Крылья содержат брусья 132, 135 для навешивания сменных рабочих органов первого и второго крыльев. Вдоль центрального бруса 118 для навешивания сменных рабочих органов, а также брусьев 132, 135 для навешивания сменных рабочих органов первого и второго крыльев прикреплена совокупность высевающих секций 140. Высевающие секции содержат дозаторы 142 семян, инструменты для взаимодействия с почвой и/или другие компоненты, используемые для контролируемой посадки, обработки почвы и удобрения семян. К первому и второму крыльям 130, 134 также присоединены первое и второе разметочные устройства 133, 136. Разметочные устройства содержат исполнительные устройства 137, которые используются для подъема и опускания разметочных устройств 133, 136. Разметочные устройства 133, 136 можно опускать, чтобы обеспечить ориентир для края сеялки для использования при посадке. Если в этом нет необходимости, маркеры можно поднять в положение, показанное на Фиг. 2, чтобы убрать маркеры с пути.
На Фиг. 2 также показана совокупность вентиляторов 126, а также совокупность колес 138. Крылья также могут содержать исполнительные устройства 131 для подъема и опускания или иного приложения направленной вниз силы на крылья. Поэтому, как показано на Фиг. 2, существует множество компонентов посадочного орудия 110. Компоненты могут включать в себя движущиеся части, такие как исполнительные устройства, используемые для перемещения крыльев, разметочных устройств, высевающих секций и т. д., а также обеспечивающие дополнительные функции. Например, вентиляторы 126 используют для обеспечения давления в дозаторах 142 семян, чтобы содействовать прилипанию семян к движущемуся в них высевающему диску. Дозаторы семян могут иметь электрический привод в том смысле, что двигатель, такой как шаговый двигатель, можно использовать для вращения дозаторов семян, чтобы содействовать прилипанию к нему семян и обеспечивать дозирование семян контролируемым образом для идеального расстояния, распределения и/или размещения. Другие признаки могут включать в себя исполнительные устройства или другие механизмы для прикладывания прижимной силы к высевающим секциям 140. Фары также могут быть включены как часть сеялки.
Дополнительно, между центральными бункерами 124 и любой совокупностью дозаторов 142 семян на высевающих секциях 140 может быть обеспечена пневматическая система подачи семян, поскольку пневматическая система подачи семян обеспечивает непрерывный поток семян к высевающим секциям по мере необходимости для обеспечения непрерывной посадки семян посредством дозаторов семян на высевающих секциях. Таким образом, для различных органов управления сеялки может потребоваться или иным образом быть полезным использование системы управления орудием. Система управления орудием может содействовать управлению каждой из функций орудия или сеялки 110, чтобы обеспечить бесперебойную или близкую к бесперебойной работу с орудием, а также обеспечивает связь и/или передачу данных, состояния и другой информации между компонентами.
Следует понимать, что сеялка не обязательно должна включать в себя все признаки, раскрытые в настоящем документе, и может также включать в себя дополнительные или альтернативные признаки, как те, которые показаны и/или описаны. Вышеизложенное было включено в виде приведенной в качестве примера сеялки, и следует понимать, что по существу любая сеялка от любого производителя и любые дополнения или послепродажные компоненты могут быть включены в любую сеялку, которая охватывает любой из аспектов настоящего изобретения.
Следовательно, сеялка 110, такая как показанная, может тянуться буксирующим транспортным средством, таким как трактор 100, показанный на Фиг. 1. Кроме того, сеялку 110 можно буксировать самоходным автономным буксировочным блоком, а не транспортным средством, управляемым оператором, таким как трактор, например, показанный и описанный в находящемся в совместной собственности патенте США № 10,575,453, который полностью включен в настоящий документ посредством ссылки. Задние ведущие колеса и передние направляющие колеса могут быть заменены гусеницами, независимо от того, реализованы ли указанные гусеницы на транспортном средстве, управляемом оператором, или самоходном транспортном средстве.
Объем информации, передаваемой между трактором и компонентами сеялки, постоянно возрастает и включает в себя высокую интенсивность движения. В настоящее время любая передача информации осуществляется с низкой пропускной способностью, слабо определенным протоколом, а также включает в себя проблемы совместимости между различными компонентами трактора и/или орудиями. Таким образом, возникли проблемы, и был разработан новый тип системы, включающий в себя сочетание высокой интенсивности движения, низкую задержку, высокий уровень безопасности, высокую надежность, высокую пропускную способность, общую цепочку поставок и высокопрочную систему, чтобы обеспечить работу орудия и содействовать управлению различными компонентами орудия или связанными с ним. Следовательно, необходимо понимать, что настоящее изобретение обеспечивает решения для удовлетворения указанных возникающих требований, которые могут включать в себя повышение прочности и/или комплекты ввода/вывода (I/O). Решение было разработано с использованием стандартных протоколов и компонентов с учетом смежных возможностей. Результатом становится интеллектуальное решение на основе Интернета вещей, поддерживающее уникальный комплект функций и элементов ввода/вывода.
Таким образом, на Фиг. 3 показана система управления орудием и компоненты в соответствии с аспектами настоящего изобретения. Как показано на фигуре, некоторые компоненты системы управления орудием могут быть включены не в само орудие. Например, система управления орудием, как показано на фигуре, содержит систему 150 интеллектуального управления, в которой, например, может использоваться сенсорный дисплей или другой интерфейс машина-пользователь. Примерами такой системы 150 интеллектуального управления могут быть, но не ограничены ими, планшеты, телефоны, портативные устройства, ноутбуки, пользовательские дисплеи, компьютеры или другие вычислительные устройства, способные разрешать ввод, предоставлять параметры и отображать выходные данные электронных функций. Кроме того, система 150 управления может содержать дополнительные компоненты, такие как микропроцессор, микроконтроллер, другое подходящее программируемое устройство, другие компоненты, реализованные частично или полностью на полупроводнике (например, микросхема программируемой пользователем вентильной матрицы (FPGA), такая как микросхема, разработанная посредством процесса проектирования уровня межрегистровых передач (RTL)). К тому же, система 150 управления может содержать ряд вводов, выводов, запоминающее устройство, источник питания, динамики, микрофоны, камеры, датчики и т. п.
Система 150 интеллектуального управления может быть прикреплена к блоку 154 интеллектуального маршрутизатора или иным образом связана с ним. Блок 154 интеллектуального маршрутизатора может быть включен, но не требуется во всех случаях. Например, когда система 150 интеллектуального управления представляет собой планшет, система 150 интеллектуального управления может не содержать требуемое количество соединений, вводов и/или возможностей вывода. Следовательно, интеллектуальный маршрутизатор 154 может быть включен для соединения с системой 150 интеллектуального управления, чтобы обеспечить дополнительные вводы, выводы и/или другие возможности соединения с системой 150 интеллектуального управления. Система 150 интеллектуального управления и/или интеллектуальный маршрутизатор 154 могут быть удалены от орудия, такого как сеялка 110. Как показано на Фиг. 3, комбинация системы 150 интеллектуального управления и интеллектуального маршрутизатора 154 показана в тракторе 100 или другом буксирующем транспортном средстве. Когда система 150 интеллектуального управления представляет собой планшет, этот элемент можно расположить внутри кабины трактора, чтобы обеспечить отображение ввода и вывода на его дисплее таким образом, что оператор может просматривать указанный дисплей и взаимодействовать с ним, находясь в тракторе 100. Однако следует иметь в виду, что блок управления можно использовать преимущественно в любом месте, удаленном от посадочного орудия, и он может быть даже удален от местоположения или местонахождения поля.
Как уже упоминалось, система интеллектуального управления может принимать форму дисплея или компонента дисплея. Дисплей представляет собой форму пользовательского интерфейса. Пользовательский интерфейс представляет собой способ взаимодействия пользователя с машиной. Пользовательский интерфейс может представлять собой цифровой интерфейс, интерфейс командной строки, графический пользовательский интерфейс (GUI) или любой другой возможный способ взаимодействия пользователя с машиной. Например, пользовательский интерфейс (UI) может включать в себя комбинацию цифровых и аналоговых устройств ввода и/или вывода или любого другого типа устройства ввода/вывода UI, необходимого для достижения требуемого уровня контроля и мониторинга для устройства. Примеры устройств ввода и/или вывода включают в себя компьютерные мыши, клавиатуры, сенсорные экраны, ручки, диски, переключатели, кнопки и т. д. Затем ввод (вводы), полученный от UI, может быть отправлен на микроконтроллер для управления операционными аспектами устройства.
Модуль пользовательского интерфейса может содержать дисплей, который может действовать в качестве устройства ввода и/или вывода. Такой дисплей может представлять собой, например, жидкокристаллический дисплей (LCD), дисплей на светоизлучающих диодах (LED), дисплей на органических светоизлучающих диодах (OLED), электролюминесцентный дисплей (ELD), дисплей с электронным эмиттером с поверхностной проводимостью (SED), дисплей с автоэлектронной эмиссией (FED), LCD на тонкопленочных транзисторах (TFT) или отражающий бистабильный холестерический дисплей (т. е. электронная бумага).
Система интеллектуального управления/дисплей 150 в тракторе предоставляет большое количество информации. Приведенные в качестве примера блоки информации могут включать в себя, но не ограничиваются этим, архивную информацию (планирование пути, урожайность, местоположения посадки и т. д.), системы связи/сети (Bluetooth, проводные или беспроводные соединения, связь ближнего поля, WAN, LAN, сотовые сети и т. д.), информацию спидометра, информация о направлении (информацию по 9 осям), датчики, программируемую логику, ввод/выводы и т. п. Информация может относиться к трактору, сеялке или их комбинации. Информация может также включать в себя информацию от дополнительных тракторов и/или сеялок или других орудий на общем поле или отдельном поле.
Еще дополнительные компоненты, которые могут быть связаны с буксирующим транспортным средством/трактором 100, располагаться на нем или иным образом, включают в себя глобальную систему позиционирования (GPS). GPS может располагаться отдельно или быть частью дисплея 150 и использоваться для предоставления информации о местоположении трактору 100.
На Фиг. 3 также показаны компоненты системы, которые могут быть частью орудия, такого как сеялка 110. Также следует понимать, что орудие может представлять собой по существу сельскохозяйственное орудие любого типа, включая, но не ограничиваясь этим, сеялки, рядовые сеялки, почвообрабатывающие орудия, распылители, диски, сошники для внесения удобрений и т. п. Как показано, сеялка/орудие 110 может содержать GPS 146, которая может быть взята из трактора 100, или может представлять собой отдельный источник/индикатор местоположения сеялки отдельно от трактора. Это может иметь форму антенны или другого приемника для связи с источником GPS, таким как спутник или вышка, для передачи информации о местоположении.
С сеялкой 110 связаны высевающие секции 140, число которых может быть от единицы до N, причем N может представлять собой любое число больше единицы. Высевающие секции сеялки содержат компоненты, который содействуют точной укладке семян в поле, например, на основе местоположения, определенного GPS. Таким образом, высевающие секции содержат многочисленные компоненты, такие как включающие в себя, но не ограниченные этим, инструменты для взаимодействия с почвой, датчики, исполнительные устройства, датчики, инерционные измерительные блоки и т. п. Высевающие секции 140 и/или другие компоненты сеялки 110 также могут содержать множество других органов управления и датчиков. Органы управления и/или датчики могут управляться или иным образом связываться с маршрутизатором, узлом, системой интеллектуального управления, датчиками и т. п.
Например, сеялка может содержать одно или более из интеллектуального маршрутизатора сеялки (IPR) 162, интеллектуального узла сеялки (IPN) 166 и интеллектуального устройства позиционирования сеялки (IPP) 164. IPR 162 также может называться персональным модулем сеялки и является типом интеллектуального маршрутизатора орудия или элемента интеллектуального маршрутизатора. IPR 162, как будет раскрыто в настоящем документе, обеспечивает программируемость сеялки, одновременно обеспечивая возможность соединения с компонентами и органами управления для различных аспектов сеялки. Например, IPR 162 может содержать функцию или элемент интеллектуального управления (центральный процессор и т. п.), который можно запрограммировать для предоставления информации, относящейся к сеялке 110. Это может включать в себя количество рядов на сеялке, тип сеялки, тип давления для дозаторов семян, тип дозаторов семян, количество дозаторов семян и преимущественно любую другую информацию, связанную с сеялкой таким образом, что информацию можно использовать для управлять функциональными возможностями сеялки. Такое программирование IPR 162 может быть выполнено во время изготовления сеялки, например ее сооружения. Следовательно, IPR 162 может быть запрограммирован на заводской основе для предоставления такой информации, которая может быть передана другими компонентами системы управления орудием. Однако конфигурация IPR 162 будет предоставлять информацию, встроенную в его ЦП во время изготовления, чтобы обеспечить параметры и настройки для взаимодействия с другими компонентами системы управления орудием. IPR 162 может быть соединен с совокупностью интеллектуальных узлов 166 сеялки, которые могут преимущественно называться интеллектуальными узлами или другими интеллектуальными узлами орудия.
IPN 166 можно использовать как для высевающих секций сеялки, так и для вспомогательных функций сеялки. IPN 166 может быть расположен на каждой высевающей секции сеялки или может быть увеличен таким образом, чтобы было несколько IPN на каждой высевающей секции таким образом, что IPN могут быть разбиты на ряд один IPN, ряд два IPN полностью и до ряда N IPN, причем это равно количеству высевающих секций, связанных с сеялкой. Аналогичным образом, когда IPN 166 используется со вспомогательной функцией сеялки, количество IPN, связанных с сеялкой, может быть определено на основе количества вспомогательных функций, связанных с самой сеялкой.
IPP 164 в общем можно назвать элементами интеллектуального позиционирования или элементами интеллектуального позиционирования орудия. IPP 164, как будет раскрыто в настоящем документе, можно использовать с каждым из узлов или с любым количеством функций или компонентов сеялки 110 для предоставления дополнительной информации, связанной с компонентами. Это может включать в себя движение, местоположение или другие данные, которые могут быть собраны через IPP 160, которые могут быть использованы и переданы в различные компоненты системы управления орудием, такие как пользовательский дисплей системы 152 интеллектуального управления.
IPN, IPR и IPP показаны и описаны в находящемся в совместной собственности патенте США № 10,952,365, который полностью включен в настоящий документ посредством ссылки. Как показано в заявке на патент США № 10,952,365, IPN, IPR и IPP имеют многочисленные функции и работают с многочисленными компонентами. Как показано в заявке, имеется система интеллектуального управления в форме элемента дисплея/ЦП. Элемент дисплея/ЦП соединен с IPR. Соединение Ethernet можно использовать для соединения дисплея с IPR орудия. Использование соединения Ethernet обеспечивает высокоскоростную передачу информации между компонентами с высокой пропускной способностью. Протокол Ethernet обеспечивает высокоскоростную, высокую пропускную способность, при этом большой объем данных может передаваться между двумя компонентами, соединенными посредством соединения Ethernet, таким образом, который до сих пор не был реализован в сельскохозяйственной отрасли. Таким образом, использование сети Ethernet в системе управления орудием обеспечивает гораздо более высокую скорость передачи при передаче данных высокоскоростным способом. Показано, что IPR имеет три соединения Ethernet, отходящие от него. Они включают в себя Ethernet левое, Ethernet правое и Ethernet вспомогательное. Соединение Ethernet левое показывает соединение Ethernet с левым крылом сеялки 110, и показано, что оно соединено с рядом IPN, которые связаны с высевающими секциями, прикрепленными к левому крылу сеялки или на нем. Аналогично, соединение Ethernet правое соединено с совокупностью IPN, которые связаны с рядом высевающих секций, прикрепленных к правому крылу сеялки 110 или связанных с ним. Однако следует понимать, что количество используемых IPN и делегирование правого и левого каналов приведены только для иллюстративных целей и не должны ограничивать настоящее изобретение. Наконец, соединение Ethernet вспомогательное соединяет IPR с совокупностью IPN, связанных со вспомогательными функциями сеялки 110. Хотя два IPN соединены посредством Ethernet вспомогательного, следует понимать, что это предназначено только для иллюстративных целей и не должно ограничивать настоящее изобретение.
Следовательно, в иллюстративных целях соединение Ethernet левое, связанное с IPN, может быть описано следующим образом. IPN соединены с рядом датчиков, двигателей и других органов управления, в которых IPN передают информацию между собой и IPR для управления функциями его компонентов. Например, один IPN соединен с двигателем дозатора семян, центром потока инсектицида, датчиком семян, кнопкой ручного режима, управлением двигателем инсектицидов и датчиком жидких удобрений. Такой двигатель и датчики преимущественно связаны с высевающей секцией и/или дозатором семян сеялки. Следовательно, IPN соединен с компонентами и работает с IPR для управления функциональными возможностями различных компонентов. Другой IPN, соединенный с соединением Ethernet левым, включает в себя соединение с вакуумными соленоидами, рабочими фарами, датчиками вакуума, рабочими выключателями и пневматическим давлением прижима (PDP). Аналогичным образом, другой IPN, соединенный с соединением Ethernet правым, включает в себя соединение с вакуумными соленоидами, рабочими фарами, датчиками вакуума, рабочими выключателями и соленоидами разметочного устройства. Они также представляют собой функции, связанные с крылом и управлением его компонентами. Следовательно, дополнительный IPN будет включать в себя соединения и управление функциями, связанными с этими компонентами. Соединение Ethernet вспомогательное показано соединенным с дополнительными компонентами. Например, IPN, связанные с соединением Ethernet вспомогательным, включают в себя компоненты соленоидов колес крыла, соленоидов оси, соленоидов крыла, катушек возбуждения, датчиков генератора переменного тока, датчиков температуры, органов управления пневматической подачей семян, соленоидов сцепки, органов управления запуском от внешнего источника и органов управления удобрениями. Такие органы управления, датчики и т. п. связаны с другими аспектами сеялки и ее управления. Это обеспечивает использование сеялки и получение данных, связанных с различными органами управления.
Следовательно, IPN находятся в сообщении с IPR, чтобы обеспечить органы управления для связанных компонентов IPN. Это обеспечит управление сеялкой на более высокой скорости и с более высокой пропускной способностью таким образом, что органы управления будут передавать больший объем данных между и IPR. Кроме того, использование показанной и описанной системы управления орудием обеспечит дополнительные преимущества и улучшения. Такие преимущества могут включать в себя тип системы «Подключайся и работай». В настоящее время каждая высевающая секция включает в себя узел или плату управления, специально запрограммированную для местоположения высевающей секции по отношению к сеялке, типа дозатора семян, используемого с сеялкой, и других факторов, на которые специально рассчитан узел, который привязан к конкретному местоположению. Аспекты настоящего изобретения обеспечивают по сути универсальность и функциональность IPN для обеспечения соединения IPN с IPR, в котором затем IPN будет запрограммирован для обеспечения любого количества функциональных возможностей. Затем эти функциональные возможности могут быть переданы на пользовательский дисплей, чтобы позволить оператору взаимодействовать с IPN в отношении того, как он должен действовать, реагировать или иным образом функционировать по отношению к другим компонентам системы управления орудием.
Например, IPR можно запрограммировать во время изготовления, как было раскрыто ранее. Он может содержать информацию, относящуюся к сеялке, такую как количество высевающих секций, тип механизма подачи семян, тип обеспечения прижимной силы, тип давления на дозаторы семян и/или любые другие факторы, которые могут варьироваться в зависимости от посадочного орудия. IPN могут быть прикреплены к сеялке, при этом IPR может передавать эту информацию на IPN через высокоскоростные соединения Ethernet с высокой пропускной способностью для предоставления информации, относящейся к сеялке, на IPN. Затем IPN может распознавать другие компоненты, соединенные с ним, и может предоставлять функциональные возможности оператору через пользовательский дисплей, чтобы дать возможность оператору вводить требуемые результаты, органы управления, параметры или другие входные данные, чтобы позволить IPN активно управлять компонентами, соединенными с ним, на основе указанных входных данных. Это быстрое программирование в стиле «Подключайся и работай» позволяет практически не программировать IPN до тех пор, пока они не будут соединены с номером IPR. Холостое программирование IPN обеспечит быструю связь IPN с соединенными с ним компонентами, чтобы обеспечить управление указанными компонентами независимо от какого-либо предварительного программирования. Преимущество такого подхода состоит в том, что это экономит время, затраты и исключает другие проблемы, связанные со специальным программированием платы управления с функциональными возможностями компонентов, к которым она будет прикреплена.
На Фиг. 11 схематично проиллюстрирована аппаратная среда, на которой подчеркнуты вычислительные компоненты приведенной в качестве примера системы интеллектуального управления, такие как планшет или блок отображения другого типа с сенсорным дисплеем.
Система интеллектуального управления содержит запоминающее устройство, которое имеет область хранения программ и/или область хранения данных. Запоминающее устройство включает либо постоянное запоминающее устройство (ROM), пример энергонезависимого запоминающего устройства, что означает, что оно не теряет данные, когда оно не соединено с источником питания), либо оперативное запоминающее устройство (RAM), пример энергозависимого запоминающего устройства, что означает, что оно теряет данные, когда не соединено с источником питания). Примеры энергозависимого запоминающего устройства включают в себя статическое RAM (SRAM), динамическое RAM (DRAM), синхронное DRAM (SDRAM) и т. д. Примеры энергонезависимого запоминающего устройства включают в себя электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), флэш-память, жесткие диски, SD-карты и т. д.
Центральный процессор, такой как процессор, микропроцессор или микроконтроллер, соединен с запоминающим устройством и способен выполнять программные команды, хранящиеся в запоминающем устройстве. Центральный процессор представляет собой электронную схему, которая выполняет операции с некоторым внешним источником данных, таким как запоминающее устройство или каким-либо другим потоком данных. Центральный процессор выполняет основные арифметические, логические, управляющие операции и операции ввода/вывода (I/O), указанные в командах.
Как показано на Фиг. 11, аспектами системы интеллектуального управления, включая компьютерные аппаратные и программные ресурсы модулей, управляет операционная система, хранящаяся в запоминающем устройстве. Более конкретно, компилятор позволяет программному приложению, написанному на языке программирования, таком как COBOL, C++, FORTRAN или любом другом известном языке программирования, преобразовываться в код для считывания центральным процессором. После завершения центральный процессор осуществляет доступ к данным, хранящимся в запоминающем устройстве энергонезависимого машиночитаемого носителя, и манипулирует ими, используя отношения и логику, заданные программным приложением и сгенерированные с помощью компилятора.
В одном варианте реализации программное приложение и компилятор материально реализованы в системе интеллектуального управления. Когда команды считываются и выполняются центральным процессором, система интеллектуального управления выполняет этапы, необходимые для реализации и/или использования настоящего изобретения. Программное приложение, команды по эксплуатации и/или встроенное программное обеспечение (полупостоянное программное обеспечение, запрограммированное в постоянном запоминающем устройстве) также могут быть материально реализованы в запоминающем устройстве, модуле сельскохозяйственных данных, модуле аналитики, модуле сельскохозяйственных задач и/или устройствах передачи данных (например, модуле связи), таким образом превращая любое программное приложение, раскрытое в настоящем документе, в продукт или изделие в соответствии с настоящим изобретением.
Модуль связи способен соединять систему интеллектуального управления с сетью, такой как сеть облачных вычислений, и/или системами взаимосвязанных сетей, такими как Интернет. В некоторых вариантах реализации система интеллектуального управления и/или модуль связи могут содержать один или более коммуникационных портов, таких как Ethernet, последовательное присоединение по передовой технологии (SATA), универсальную последовательную шину (USB) или интегрированную электронику накопителей (IDE), для передачи, приема или хранения данных. В других вариантах реализации модель лицензирования и доставки программного обеспечения, используемая в связи с сетью 200A облачных вычислений, может представлять собой программное обеспечение как услугу (SaaS), инфраструктуру как услугу (IaaS), платформу как услугу (PaaS), рабочий стол как услуга (DaaS), поставщик управляемых услуг, мобильную инфраструктуру как услугу (MBaaS) или управление информационными технологиями как услугу (ITMaaS).
Модуль сельскохозяйственных данных содержит необходимые аппаратные и/или программные компоненты и/или электрически соединен с другими вычислительными компонентами таким образом, что система интеллектуального управления может более эффективно хранить, контролировать и передавать сельскохозяйственные данные.
Для предоставления точной и актуальной информации важна GPS 145, 146 либо трактора 100, либо сеялки 110. Точное земледелие ориентируется на очень точное и своевременное знание физического местоположения. Урожайность может быть напрямую связана с тем, насколько точно может быть соблюдено расстояние между семенами. На сегодняшний день традиционная GPS имеет ограничения по точности, которые необходимо дополнить данными из других источников. Дополнительно, из-за препятствий, атмосферных явлений или других воздействий перебои в получении данных GPS представляют собой проблему для сельскохозяйственных операций. Следовательно, в соответствии с аспектами настоящего изобретения можно использовать набор источников данных для улучшения данных о местоположении традиционной GPS. Традиционные формы на практике связаны с самим приемником GPS, причем коррекции обеспечиваются базовыми станциями, модемами сотовой связи и т. д. Если они недоступны или нежелательны, необходимы дополнительные источники данных.
Инерциальный измерительный блок (IMU) 170, такой как показанный на Фиг. 4, может быть использован в сочетании с GPS для обеспечения абсолютного позиционирования, и с накопленными знаниями может использовать измерения IMU для продолжения пространственного отслеживания и работы до тех пор, пока не будет завершен перебой в работе GPS. Использование дополнительного источника отслеживания скорости и направления, такого как датчик скорости вращения колеса, расширяет эту возможность и увеличивает количество времени, в течение которого она действительна. IMU по существу представляет собой электронное устройство, которое измеряет и сообщает удельную силу корпуса, угловую скорость, а иногда и ориентацию корпуса, используя комбинацию акселерометров, гироскопов, а иногда и магнитометров.
В IMU 170 можно добавить информацию GPS от сеялки и/или трактора, чтобы улучшить данные о местоположении. Такие данные о местоположении могут включать в себя, но не ограничивается этим, местоположение трактора, местоположение орудия или даже местоположение события или операции, выполняемой орудием. Например, в соответствии с по меньшей мере некоторыми аспектами некоторых вариантов реализации настоящего изобретения, комбинация информации GPS и информации IMU может быть объединена для предоставления точной или близкой к точной информации, относящейся к местоположению посаженных частиц (т. е. семян). Эта улучшенная информация позволит получить более качественные данные. Такие данные могут включать в себя, но не ограничиваются этим, точное местоположение посадки для данных об урожайности, местоположение для карт предписаний, информацию о посадках для смягчения последующего уплотнения засаженной зоны, а также любую другую измеренную информацию (например, информацию об аномалиях, пустотах, препятствиях, информацию о почве, влажность почвы, тип почвы, информацию о климате, скорость, информацию о движении по 9 осям и/или информацию о высотах).
Кроме того, информацию IMU 170 можно использовать вместо информации GPS, например, во время перебоя в работе или в местоположении, где информация о местоположении GPS прерывается, отрывочно или иным образом нарушена, например, в долинах или других местоположениях, где может быть что-либо на пути между орудием и спутником GPS или другим провайдером. В такой ситуации информацию IMU можно использовать для оценки данных, указывающих местоположение и движение комбинации трактор/орудие во время перебоя в работе GPS. Это можно сделать несколькими способами, включая, но не ограничиваясь этим, информацию о направлении и скорости. Как только передача информации GPS возвращается в режим онлайн, система 150 интеллектуального управления, например, в тракторе или другом буксируемом транспортном средстве 100, может попытаться интерполировать перебой в работе и информацию, полученную во время перебоя в работе, с помощью IMU 170, чтобы заполнить пробел в местоположении во время перебоя в работе GPS. Таким образом, IMU 170 можно использовать для улучшения местоположения по GPS или предоставления информации во время перебоя в работе GPS.
Как показано на Фиг.4, IMU 170 включает в себя многочисленные компоненты. Кроме того, следует понимать, что они не являются ограничивающими, и IMU 170, как предусмотрено настоящим изобретением, может включать в себя большее или меньшее количество компонентов.
Компоненты IMU включают в себя множество признаков и подкомпонентов, включая, но не ограничиваясь этим, устройство обработки/логику 176 (например, процессор, показанный как 32-разрядный ARM Cortex-M3 от Texas Instruments), интерфейсы 178 (например, драйверы, другие переключатели, CAN и т. д.), изоляцию, разъемы или другие устройства 180 ввода/вывода (например, 12-контактные, 2-контактные, 6-контактные, заголовки, соединители, JTAG и т. д.), источники напряжения (12 В, 5 В, 3 В), блок питания, пассивные элементы (преобразователи и т. п.) и датчики (9-осевой инерциальный измерительный датчик). Также может быть отдельный источник 174 питания, который может быть встроен в виде батареи или может быть внешним через проводной или беспроводной источник питания. Как показано на фигуре, имеется также ряд дискретных и/или множественных подключений/подключений шины.
Процессор/логика 176 также может называться блоком обработки. Блок обработки, также называемый процессором, представляет собой электронную схему, которая выполняет операции с некоторым внешним источником данных, обычно запоминающим устройством или каким-либо другим потоком данных. Неограничивающие примеры процессоров включают в себя микропроцессор, микроконтроллер, арифметико-логическое устройство (ALU) и, в особенности, центральный процессор (ЦП). ЦП, также называемый центральным процессором или основным процессором, представляет собой электронную схему в компьютере, которая выполняет команды компьютерной программы, выполняя основные арифметические, логические, управляющие операции и операции ввода/вывода (I/O), указанные в командах. Блоки обработки широко распространены в планшетах, телефонах, портативных устройствах, ноутбуках, пользовательских дисплеях и других вычислительных устройствах. Один или более описанных в настоящем документе вариантов реализации могут быть реализованы с использованием программных модулей, механизмов или компонентов. Программный модуль, механизм или компонент могут включать в себя программу, подпрограмму, часть программы, или программный компонент, или аппаратный компонент, способный выполнять одну или более заявленных задач или функций. Модуль или компонент может существовать на аппаратном компоненте независимо от других модулей или компонентов. В альтернативном варианте модуль или компонент может представлять собой совместно используемый элемент или процесс других модулей, программ или машин.
Кроме того, IMU 170 может включать в себя любое количество датчиков. Датчики могут быть связаны с одним устройством или расположены внутри, на и/или вокруг орудия для получения дополнительной информации, которая затем может быть передана в процессор для конфигурации и определения информации, такой как информация о местоположении. Предполагается, что орудие содержит датчики и/или модули. Модули могут быть размещены на орудии и вокруг него и включают в себя различные датчики для предоставления информации системе интеллектуального управления. Датчики могут включать в себя визуальные датчики, радарные датчики, лидарные датчики, датчики температуры, датчики содержания влаги, радиочастотные датчики, радиоприемники ближнего и дальнего радиуса действия, антенны и т. п. Эти датчики могут быть сгруппированы любым образом и могут использоваться для определения многих аспектов. Например, датчики можно использовать для определения местоположения близлежащего объекта или препятствия. Датчики можно использовать для определения характеристик почвы, таких как содержание влаги, уплотнение, температура и т. п. Датчики также могут представлять собой датчики местоположения для определения того, находится ли орудие на ровном грунте, на возвышенности, идет ли оно вверх или вниз по склону и т. д. Датчики местоположения также могут определять участки, по которым не должно перемещаться орудие, на основе предварительно определенных и/или запрограммированных данных. Затем датчики могут давать указания исполнительным устройствам или другим механизмам на орудии, чтобы уменьшать опрокидывание, застревание, наезд на объект или иное попадание машины в нежелательную ситуацию. Датчики также можно использовать с системами определения местоположения, такими как GPS. Комбинация датчиков и систем определения местоположения позволит орудию двигаться к местоположению, не наезжая на препятствия, не наезжая на другие орудия, не повреждая посаженные или существующие культуры, а также соблюдая другие правила, такие как правила дорожного движения. Датчики и/или системы определения местоположения позволят орудию безопасно и точно перемещаться из одного местоположения в другое, в местоположения в пределах поля или иным образом в комбинации с дополнительными транспортными средствами.
Датчики измеряют одну или более характеристик объекта и могут включать в себя, среди многих других, например, акселерометры, датчики положения, датчики давления (включая датчики веса) или датчики уровня жидкости. Акселерометры могут измерять ускорение объекта в различных направлениях (например, в направлении по оси x, направлении по оси y и т. д.). Датчики положения могут измерять положение одного или более компонентов объекта. Например, датчики положения могут измерять положение объекта относительно другого неподвижного объекта, такого как стена. Датчики давления могут измерять давление газа или жидкости или даже вес объекта. Датчики уровня жидкости могут воспринимать измерение жидкости, содержащейся в контейнере, или измерять глубину жидкости в ее естественном виде, такой как вода в реке или озере. При необходимости может быть обеспечено меньше или больше датчиков. Например, датчик вращения можно использовать для определения скорости (-ей) объекта (-ов), фотодетектор можно использовать для определения света или другого электромагнитного излучения, датчик расстояния можно использовать для определения расстояния, пройденного объектом, таймер можно использовать для определения продолжительности использования объекта и/или продолжительности использования любого компонента, а датчик температуры можно использовать для определения температуры объекта или жидкости.
Следует отметить, что в по меньшей мере некоторых из аспектов и/или вариантов реализации, раскрытых в настоящем документе, датчики и/или IMU расположены на отдельных независимых платформах, например, как на тракторе 100, так и на орудии 110. Взаимосвязанная высокоскоростная сеть делает возможным объединение. Аспекты настоящего изобретения включают в себя использование датчиков по отдельности для определения состояния (ориентации и положения) платформ и последующее объединение их в решение по положению для использования орудием. Затем, когда GPS недоступна, состояние платформы сохраняется и оставшиеся датчики способствуют поддержанию состояния платформы за счет движения орудия.
Еще дополнительная информация может быть получена от IMU 170, такая как информация о погоде (температура, влага/влажность, атмосферное давление, насыщенность, информация о ветре и т. п.).
На Фиг. 5 представлена схема поля 190, засаживаемого посредством комбинации трактора 100 и сеялки 110. На схеме показана комбинация, движущаяся в направлении стрелки 182. Дополнительная информация, показанная на фигуре, представляет собой информацию 192 о посадках. Информация 192 о посадках показывает путь, по которому прошла указанная комбинация, и местоположение засаженного поля 190. Это показано перекрестной штриховкой 192. Следует понимать, что эта информация может быть важной, так как нежелательно, чтобы засаженное местоположение было снова засажено или даже заезжено, что может привести к уплотнению, которое может повлиять на рост посаженной культуры и конечный урожай. Это может быть особенно важно при наличии нескольких машин в общем поле 190, чтобы каждой машине было известно местоположение и выполняемые операции (т. е. местоположение посадки) другой машины, чтобы уменьшить чрезмерную посадку или повторную посадку. Следует понимать, что информация может отображаться на пользовательском интерфейсе, например, на тракторе, в поле или в любом другом местоположении, удаленном от поля.
Кроме того, информация, включая местоположение операции, такая как информация 192 о посадке, например показанная на Фиг. 5, может представлять собой информацию, которая совместно используется как часть сети 200, такой как показанная на Фиг. 6. На Фиг. 6 показан пример сети для передачи информации от сеялки. Информация может быть передана во многие местоположения сети, такие как, но не ограниченные этим, дополнительные орудия, мобильные устройства, серверы/компьютеры или другие узлы, элементы, устройства и т. п. сети. Следует понимать, что сеть может представлять собой облачную сеть, основанную на Интернете сеть или сотовую сеть. В некоторых вариантах реализации сеть представляет собой, только в качестве примера, глобальную сеть (WAN), такую как сеть на основе TCP/IP или сотовая сеть, локальную сеть (LAN), районную сеть (NAN), домашнюю сеть (HAN) или персональную сеть (PAN), использующую любой из множества протоколов связи, таких как Wi-Fi, Bluetooth, ZigBee, связь ближнего поля (NFC) и т. д., хотя возможны и другие типы сетей, которые возможны рассматриваются в настоящем документе. Указанная сеть обычно обеспечивает связь между модулем связи и центральным местоположением в моменты низкокачественного соединения. Связь через сеть может быть защищена с использованием одного или более методов шифрования, таких как методы, обеспеченные в расширенном стандарте шифрования (AES), который заменил стандарт шифрования данных (DES), в стандарте IEEE 802.1 для сетевой безопасности на основе портов, предварительного общего ключа, расширяемого протокола аутентификации (EAP), встроенного эквивалента конфиденциальности (WEP), протокол ограниченной во времени целостности ключа (TKIP), защищенного доступа Wi-Fi (WPA) и т. п.
Как показано на Фиг. 6, сеть 200 может представлять собой облачную сеть 202. Облачные вычисления представляют собой модель предоставления услуг, обеспечивающую удобный сетевой доступ по запросу к общему пулу конфигурируемых вычислительных ресурсов (например, сети, пропускная способность сети, серверы, блоки обработки, запоминающие устройства, хранилища, приложения, виртуальные машины и сервисы), которые могут быть быстро предоставлены и высвобождены с минимальными усилиями по управлению или взаимодействием с поставщиком услуг. Среда облачных вычислений ориентирована на услуги с акцентом на отсутствие состояния, низкую степень связи, модульность и семантическую совместимость. В основе облачных вычислений лежит инфраструктура, содержащая сеть взаимосвязанных узлов.
Приведенные в качестве примера характеристики модели облачных вычислений
Самообслуживание по запросу: потребитель услуг облачных вычислений может в одностороннем порядке обеспечивать вычислительные возможности, такие как серверное время и сетевое хранилище, по мере необходимости автоматически, не требуя взаимодействия человека с поставщиком услуги.
Широкий сетевой доступ: возможности доступны по сети и доступны через стандартные механизмы, которые способствуют использованию разнородными тонкими или толстыми клиентскими платформами (например, мобильными телефонами, ноутбуками и PDA).
Объединение ресурсов: вычислительные ресурсы поставщика объединяются для обслуживания нескольких потребителей с применением многопользовательской модели, причем различные физические и виртуальные ресурсы динамически назначаются и переназначаются в соответствии с запросом. Существует ощущение независимости от местоположения, поскольку потребитель по существу не имеет контроля или знаний о точном местонахождении обеспечиваемых ресурсов, но может указать местоположение на более высоком уровне абстракции (например, страна, штат или центр обработки данных).
Динамичная гибкость: возможности могут быть быстро и гибко обеспечены, в некоторых случаях автоматически, для быстрого масштабирования и быстро высвобождены для быстрого свертывания. Возможности, доступные для обеспечения, часто кажутся потребителю неограниченными и могут быть приобретены в любом количестве в любой момент времени.
Измеряемый сервис: облачные системы автоматически контролируют и оптимизируют использование ресурсов, используя возможности измерения на некотором уровне абстракции, соответствующем типу сервиса (например, хранение, обработка, пропускная способность и учетные записи активных пользователей). Использование ресурсов можно отслеживать, контролировать и сообщать, обеспечивая прозрачность как для поставщика, так и для потребителя используемого сервиса.
Приведенные в качестве примера модели сервиса модели облачных вычислений
Программное обеспечение как сервис (SaaS): возможность, предоставляемая потребителю, заключается в использовании приложений поставщика, работающих в облачной инфраструктуре. Приложения доступны с различных клиентских устройств через интерфейс тонкого клиента, такой как веб-браузер (например, веб-почта). Потребитель не управляет и не контролирует базовую облачную инфраструктуру, включая сеть, серверы, операционные системы, хранилище или даже возможности отдельных приложений, за возможным исключением ограниченных специфичных для пользователя настроек конфигурации приложений.
Платформа как сервис (PaaS): возможность, предоставляемая потребителю, заключается в развертывании в облачной инфраструктуре созданных или приобретенных потребителем приложений, созданных с использованием языков программирования и инструментов, поддерживаемых поставщиком. Потребитель не управляет и не контролирует базовую облачную инфраструктуру, включая сети, серверы, операционные системы или хранилище, но имеет контроль над развернутыми приложениями и, возможно, конфигурациями среды размещения приложений.
Инфраструктура как сервис (IaaS): возможность, предоставляемая потребителю, заключается в обеспечении обработки, хранения, сетей и других основных вычислительных ресурсов, причем потребитель может развертывать и запускать произвольное программное обеспечение, которое может включать операционные системы и приложения. Потребитель не управляет базовой облачной инфраструктурой и не контролирует ее, но имеет контроль над операционными системами, хранилищем, развернутыми приложениями и, возможно, ограниченным контролем над выбранными сетевыми компонентами (например, брандмауэрами хоста).
Приведенные в качестве примера модели развертывания модели облачных вычислений
Частное облако: облачная инфраструктура используется исключительно для организации. Она может управляться организацией или третьей стороной и может существовать в помещениях, так и вне помещений.
Облако сообщества: облачная инфраструктура совместно используется несколькими организациями и поддерживает конкретное сообщество, у которого есть общие интересы (например, миссия, требования безопасности, политика и соображения соответствия). Оно может управляться организациями или третьей стороной и может существовать в помещениях, так и вне помещений.
Публичное облако: облачная инфраструктура доступна для широкой общественности или большой отраслевой группы и принадлежит организации, продающей облачные услуги.
Гибридное облако: облачная инфраструктура состоит из двух или более облаков (частного облака, облака сообщества или публичного облака), которые остаются уникальными объектами, но связаны друг с другом стандартизированной или запатентованной технологией, обеспечивающей переносимость данных и приложений (например, пакетная обработка облака для балансировки нагрузки между облаками).
Иллюстративная среда 200 облачных вычислений содержит один или более узлов облачных вычислений, с которыми локальные вычислительные устройства используются потребителями услуг облачных вычислений. Вычислительные устройства 204 могут включать в себя, например, персональный цифровой помощник (PDA) или сотовый телефон, настольный компьютер, ноутбук и/или любой другой подходящий тип компьютерных систем или другие мобильные устройства. Узлы облачных вычислений будут связываться друг с другом и могут быть сгруппированы физически или виртуально в одну или более сетей, таких как частные, общественные, общедоступные или гибридные облака, как описано выше, или их комбинацию. Это позволяет среде 200 облачных вычислений предлагать инфраструктуру, платформы и/или программное обеспечение в качестве услуг, для которых потребителю услуг облачных вычислений не требуется поддерживать ресурсы на локальном вычислительном устройстве. Следует понимать, что типы вычислительных устройств предназначены только для иллюстрации, и что вычислительные узлы и среда 200 облачных вычислений могут связываться с любым типом компьютеризированного устройства по любому типу сети и/или сетевому адресному соединению (например, с помощью веб-браузера).
Информация сети 200 может быть отправлена и/или сохранена на сервере или в другом запоминающем устройстве 206. В некоторых вариантах реализации запоминающее устройство включает в себя область хранения программ и/или область хранения данных. Запоминающее устройство может включать постоянное запоминающее устройство (ROM), пример энергонезависимого запоминающего устройства, что означает, что оно не теряет данные, когда оно не соединено с источником питания), или оперативное запоминающее устройство (RAM), пример энергозависимого запоминающего устройства, что означает, что оно теряет данные, когда не соединено с источником питания). Примеры энергозависимого запоминающего устройства включают в себя статическое RAM (SRAM), динамическое RAM (DRAM), синхронное DRAM (SDRAM) и т. д. Примеры энергонезависимого запоминающего устройства включают в себя электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), флэш-память, жесткие диски, SD-карты и т. д. В некоторых вариантах реализации блок обработки, такой как процессор, микропроцессор или микроконтроллер, соединен с запоминающим устройством и выполняет программные команды, которые могут быть сохранены в RAM запоминающего устройства (например, во время выполнения), ROM запоминающего устройства (например, по существу на постоянной основе) или другом энергонезависимом машиночитаемом носителе, таком как другое запоминающее устройство или диск.
Сервер 206 может также содержать сельскохозяйственные данные и/или модули. Такие данные могут быть распределены на категории и/или разделены на уровни. Например, первый уровень сельскохозяйственных данных может содержать информацию о посадке, такую как (а) команда сажать или не сажать; (b) тип семян и/или удобрений; (c) расстояние между семенами; и (d) глубина посадки. Например, второй уровень сельскохозяйственных данных может содержать информацию об эффективности посадки, такую как (а) разделение (включая пропуски и/или дублирования); (b) нормы внесения удобрений; (c) нормы инсектицидов; (d) коэффициенты контакта с землей; (e) коэффициенты прижимной силы; и (f) нормы распределения. Например, третий уровень 208-3 сельскохозяйственных данных 208 может содержать временную, геопространственную информацию и/или информацию о прогнозе погоды, такую как (а) время суток; (b) температура воздуха; (c) время года; (d) погодные условия; и/или (e) геопространственные координаты. Например, четвертый уровень сельскохозяйственных данных может содержать информацию о транспортном средстве, такую как (а) направление, например направление или азимут орудия и/или буксирующего транспортного средства; (b) скорость или скорость движения орудия и/или буксирующего транспортного средства; (c) уровень топлива в одном или более топливных баках орудия и/или буксирующего транспортного средства; и/или (d) технические возможности орудия и/или буксирующего транспортного средства. Например, пятый уровень (не показан) сельскохозяйственных данных может содержать информацию о почве, такую как (а) содержание влаги; (b) уплотнение; (c) температура грунта; (d) подъем; (e) глубина; (f) уклон местности; и/или (g) состав почвы. Символы и/или значения для сельскохозяйственных данных могут отображаться через графический пользовательский интерфейс. Сельскохозяйственные данные могут быть обозначены как архивные данные, временные данные, оперативные данные, ожидаемые данные, прогностические данные и т. п.
Дополнительно, как показано на Фиг. 6, показаны одна или более передвижных машин. Это включает в себя первую передвижную машину 212 и передвижную машину 210, обозначенную как N, при этом N относится к любому количеству передвижных машин. Это может включать в себя две или более машин, работающих в общем поле или полях, удаленных друг от друга, при этом информация от каждой из передвижных машин передается через сеть 200. Передвижная машина может представлять собой по существу любое сельскохозяйственное орудие или машину, выполняющую одну или более сельскохозяйственных операций или функций в поле, чтобы передавать и документировать информацию, включая информацию, относящуюся к времени, местоположению и обстоятельствам, связанным с операцией.
Также на Фиг. 6 показаны дополнительные входные данные 208, которые являются частью сети и которые обеспечивают информацию для текущего и архивного картографирования, оценки, передачи, анализа или иных целей. Такие входные данные могут включать в себя, но не ограничиваются этим, информацию GPS или другую информацию о местоположении (например, от беспилотного автономного транспортного средства, дистанционно управляемого транспортного средства, вышки и т. п.), информацию датчиков, карты предписаний, картографические данные, информацию о погоде или климате и/или архивные данные (урожайность, препятствия, местоположения посадки, информацию о пути и т. п.). Любая дополнительная информация, которая может быть использована в сельскохозяйственных целях, должна рассматриваться как часть сети.
На Фиг. 7А представлена схема, показывающая несколько блоков в поле 274. Как показано на Фиг. 12, поле 274 может включать в себя первую машину, такую как трактор и/или комбинацию 146 трактора и орудия, вторую машину 146, прикрепленную к орудию, и трактор 100, прикрепленный к сеялке 110 трактора. Кроме того, тягач 276 может буксировать накопительный бункер, показанный за пределами поля 274. Первая и вторая машины 146, а также трактор 100 выполняют операцию в пределах поля. Использование нескольких транспортных средств в поле одновременно сократит время выполнения операций.
Для обеспечения того, что тракторы 100, машины 146 и/или тягач 276 не перекроют друг друга или иным образом не столкнутся друг с другом, транспортные средства излучают сетевые сигналы 226, которые могут сообщаться и передаваться друг другу. Сетевые сигналы 226 могут включать в себя огромное количество информации. Например, сетевые сигналы 226 могут сообщать местоположение блоков относительно друг друга, а также относительно местоположения в поле 274. Информация о местоположении также может включать в себя местоположение любой выполняемой сельскохозяйственной деятельности, такой как обработка почвы, посадка, внесение частиц (например, жидких или сухих удобрений), сбор урожая, опрыскивание и т. п. Сетевые сигналы 226 также могут передавать любые оповещения, предупреждения, обновления состояния или другие действия, которые могут происходить. Например, оповещения могут быть отправлены, когда в блоке немного материала, блок поврежден, обнаружено препятствие, обновляется общий статус состояния почвы, скопление мусора, концентрация сорняков и/или т. п. и т. д.
Кроме того, на Фиг. 7А показана вышка 224, излучающая сетевой сигнал 226. Вышка 224, которая может представлять собой одну из многих вышек вокруг поля, может обеспечивать дополнительные аспекты, определяющие местоположение, для поля 274, и может быть использована для добавления или иного дополнения GPS, IMU или другой информации. Высота и/или положение вышки 224 может повысить эффективность связи между задействованными элементами в поле. Вышка 224 также может сообщать другому полю или главному модулю, расположенному в другом местоположении, информацию о состоянии, оповещениях, предупреждениях или другие данные, полученные транспортными средствами в поле. Кроме того, предполагается, что сельскохозяйственные данные 208 из сетевых сигналов 226 могут быть сохранены для будущих целей. Например, когда блоки работают в поле 274, они могут получать данные, такие как данные о полевых условиях, для подготовки будущих графиков посадки и/или карт.
На Фиг. 7B представлен вид приведенного в качестве примера графического пользовательского интерфейса 216, показывающий вид со стороны одного пользователя по меньшей мере одного из трактора/орудий, таких как показанные на Фиг. 7A. Например, когда оператор перемещается на тракторе 100 по полю 274, пользователь может просматривать сельскохозяйственные данные 208 в режиме реального времени до того, как сельскохозяйственные данные 208 или их аспекты будут преобразованы, сохранены и/или отображены как архивные данные. Как показано, картографический вид 216A показывает области (представленные пунктирными линиями позади сеялки 110), которые были недавно обработаны (например, вспаханы, засажены, удобрены и т. д.) сельскохозяйственным орудием 110. Если какой-либо аспект сельскохозяйственной и/или компьютеризированной системы становится недоступным и препятствует отображению оперативных данных на карте, компьютеризированная система предоставит средство для отслеживания максимально доступного объема данных, прежде чем этот аспект снова станет доступным. Например, данные и информацию от IMU 170 можно использовать для оценки участка или участков поля, которые были обработаны во время перебоя в работе GPS. Как раскрыто, система может использовать известное направление по нескольким осям/направлениям, скорость, любое планирование пути, архивные данные, информацию от других машин и т. п., для обеспечения оценки того, где обрабатывали поле во время перебоя в работе. Эта информация может быть использована для заполнения любых данных, которые были утеряны во время перебоя в работе GPS.
Чтобы пользователь мог оценить, недоступны ли аспекты системы, на дисплее может находиться визуальный индикатор 216E состояния, который может сообщать о доступности одного или более аспектов системы. Визуальный индикатор 216E состояния указывает, доступна ли дифференциальная система GPS, и, таким образом, графический пользовательский интерфейс 216 отображает только оперативные данные и один картографический вид 216A. На Фиг. 7B визуальный индикатор состояния показывает, что дифференциальная система GPS в настоящее время недоступна.
Графический пользовательский интерфейс 216 также может предоставлять пользователю возможность выбора действий 216F с помощью устройств 212 ввода (таких как органы управления с сенсорным экраном), что позволяет (например, с помощью модулей 202, 204, 206) посредством навигации компьютеризированной системы и/или сельскохозяйственной системы выполнять определенные сельскохозяйственные задачи. Аналогично, органы 216G управления безопасностью дают оператору возможность задействовать элементы безопасности на сельскохозяйственном орудии 110.
Как показано на Фиг. 8А, которая представляет собой схему части экрана, пользовательского интерфейса или другого указания трактора 100 и сеялки 110 в поле 274, стрелка 277 показывает направление движения. Это может обеспечиваться GPS, IMU или их определенной комбинацией. Как показано на фигуре, участок 276 указывает местоположение обработанного участка поля, например участка поля, который был засажен. Также на фигуре незаполненным участком 278 показан участок без GPS, например при перебое в работе, или местоположение, в котором GPS недоступна. Как показано в примере, дисплей или интерфейс могут не иметь достоверную информацию о том, что произошло во время этого перебоя в работе. Однако использование информации от IMU может позволить системе оценить, что посадка произошла. Это может быть сделано с помощью информации IMU, а также любой сохраненной информации, например, в виде алгоритма, планирования пути, автоматического управления или других программ, указывающих запланированный путь комбинации трактор/сеялка.
Это дополнительно показано в приведенной в качестве примера форме на Фиг. 8B, на которой показан участок поля 274, показывающий засаженные участки и участки с перебоем в работе. Темно-черные участки экрана 216 указывают на то, что поле было обработано (например, засажено). Пробел на вертикальном участке может указывать на перебой в работе GPS. Таким образом, система не имеет достоверной информации о том, что поле 276 было обработано в этом местоположении. Однако, местоположение IMU может по существу заполнить потерянные местоположения и обеспечить некоторую уверенность в том, что участок поля был обработан, что затем можно использовать для заполнения пробела для указания того, что весь предполагаемый участок поля был засажен или обработан иным образом. Затем эта информация может совместно использоваться другим местоположением, например удаленным портативным компьютером или другой машиной, в общем поле 274 или другом поле.
На Фиг. 9 показана блок-схема системы, такой как контроллер/дисплей 150 в тракторе, для определения того, доступна ли GPS, а если нет, то что должно или может произойти для продолжения операций. Как показано на фигуре, первый этап состоит в том, работает ли машина/пользователь с элементом сельскохозяйственного оборудования. Это может иметь вид комбинации трактор/орудие, управляемой пользователем, или форму автономного блока, который работает на основе запрограммированных команд. См., например, находящийся в совместной собственности патент США № 10,104,824, который полностью включен в настоящий документ посредством ссылки. Это может иметь многие формы, но может представлять собой, например, запрос о том, используется ли сеялка для посадки, или даже движется ли трактор по полю. Если нет, то на этом запрос заканчивается. Если да, то следующий запрос состоит в определении того, поступает ли соответствующая информация GPS для предоставления услуг определения местоположения. Местоположение GPS можно использовать для текущего направления, заранее запрограммированного планирования пути, автоматического управления или по существу любой операции, в которой требуется или желательно определить местоположение.
Определение соответствующей GPS содействует в определении операции. Как было показано на Фиг.7В и Фиг. 8В, дисплей 216 может содержать участок дисплея, например, в рамке 216D и 216Е, которая указывает, правильно ли работает GPS для текущей операции. Если, как и в случае с 216D, имеется соответствующая GPS, машина может продолжать работать и отслеживать операцию. Эта информация может быть отображена на дисплее, сохранена в запоминающем устройстве и/или совместно использоваться одним или более удаленными устройствами. Совместно используемая информация может включать в себя информацию о местоположении, информацию об операции (посаженные семена, вспаханное местоположение, препятствие, пустота, внесенные частицы, собранная культура или по существу любая другая сельскохозяйственная операция), информацию о времени и/или любую другую информацию, связанную с работой сельскохозяйственной машины. Информацию не обязательно нужно использовать совместно, и машина может продолжать работу без совместного использования информации. Однако, если желательно совместно использовать информацию, ее можно передать по сети, такой как, но не ограничиваясь этим, одно из облачных сетей, сетей Wi-Fi, сотовых сетей, LAN, WAN, Bluetooth, Zigbee, NFC, протокола двухточечной передачи (PPP), высокоуровневого управления каналом передачи данных (HDLC) или другого средства связи, которое было раскрыто или известно иным образом. Информация может совместно использоваться в режиме реального времени удаленным устройством, машиной или пользователем для предоставления информации в режиме реального времени для операции или может совместно использоваться постфактум позже. Может происходить как одновременное совместное использование информации, так более позднее совместное использование информации.
Возвращаясь к запросу соответствующей GPS, когда отсутствует соответствующая GPS, например во время перебоя в работе GPS, прерывания, нарушения работы или иное, например в другом местоположении, в котором машина не может соответствующим образом иметь соединение с источником GPS, система может идентифицировать себя как таковую. Это может иметь форму оповещения на дисплее или может быть просто указано на дисплее, например, в рамке 216E (см., например, Фиг. 7B). Независимо от причины, когда система определяет, что отсутствует соответствующая GPS, в дополнение к предоставлению оповещения или иного указания на то же самое, следующим запросом будет запрос на наличие информации IMU, которая была получена и которую дальше будут получать. Как уже отмечалось, эта информация может включать в себя по существу любую информацию, относящуюся к работе машины, и может включать в себя датчики, лидар, радар, информацию о направлении (например, по 9 осям), данные о скорости, климате и т. д. Если имеется соответствующая информация IMU, ее можно использовать вместо информации о местоположении по GPS, чтобы обеспечить непрерывную работу машины в режиме, близком к нормальному. В этот момент машина будет продолжать работать, получая информацию и запрашивая совместное использование информации.
Как уже отмечалось, информацию IMU можно использовать для оценки местоположения машины и ее работы даже без наличия информации GPS. Как только информация GPS снова поступает, информацию IMU можно использовать для заполнения любых пробелов в отслеживании работы, чтобы заполнить пробел там, где информация GPS в ином случае предоставила бы местоположение работы машины, например, в пробеле, показанном на темном участке дисплея на Фиг. 8B. Информация IMU будет достаточно подробной, чтобы машина могла продолжать работу и даже совместно использовать информацию в режиме реального времени или в более позднее время, с уверенностью в том, что она является правильной.
Если получаемой информации IMU недостаточно или даже если она есть, система продолжит проверку состояния GPS, чтобы определить, когда информация GPS поступит снова. При необходимости машина сможет продолжить работу с IMU, и как только GPS снова заработает, также продолжится и непрерывная работа машины. Это уменьшит любое время простоя, связанное с потерей или прерыванием соединения GPS для предоставления информации о местоположении, времени или другой информации, которая может быть использована для идентификации сельскохозяйственной операции.
Однако, если будет определено, что получаемой информации GPS недостаточно или она не является соответствующей, а также недостаточно информации IMU для продолжения нормальной работы машины, система выдаст оповещение и может даже остановить работу машины. Это делается для обеспечения того, чтобы сельскохозяйственные операции не выполнялись и не отслеживались, что снизит вероятность нежелательного действия (уплотнение, многократная посадка, многократное внесение удобрений, другое нарушение работы) на участке, на котором сельскохозяйственная операция уже проводилась, но не была задокументирована.
Затем в системе можно устранить неполадки, чтобы определить причину перебоя в работе/нарушения работы GPS, а также любую проблему с IMU, чтобы попытаться получить информацию для продолжения сельскохозяйственной работы машины.
Эти команды могут быть частью базы данных. База данных представляет собой структурированный набор данных, который, как правило, хранится в компьютере. База данных, а также данные и информация, содержащиеся в ней, не обязательно должны находиться в едином физическом или электронном местоположении. Например, база данных может находиться, по меньшей мере частично, на локальном устройстве хранения, на внешнем жестком диске, на сервере базы данных, соединенном с сетью, в облачной системе хранения, в распределенном реестре (таком как те, которые обычно используют с технологией блокчейн) или т. п.
Дополнительная информация, используемая в системе, может быть представлена в виде сельскохозяйственных данных. Сельскохозяйственные данные могут быть распределены на категории и/или разделены на уровни. Например, первый уровень сельскохозяйственных данных может содержать информацию о посадке, такую как (а) команда сажать или не сажать; (b) тип семян и/или удобрений; (c) расстояние между семенами; и (d) глубина посадки. Например, второй уровень сельскохозяйственных данных может содержать информацию об эффективности посадки, такую как (а) разделение (включая пропуски и/или дублирования); (b) нормы внесения удобрений; и (c) нормы распределения. Например, третий уровень сельскохозяйственных данных может включать временную информацию и/или информацию о прогнозе погоды, такую как (а) время суток; (b) температура воздуха; (c) время года; и/или (d) погодные условия. Например, четвертый уровень (не показан) сельскохозяйственных данных может содержать информацию о транспортном средстве, такую как (а) направление, например направление или азимут орудия и/или буксирующего транспортного средства; (b) скорость или скорость движения орудия и/или буксирующего транспортного средства; (c) уровень топлива в одном или более топливных баках орудия и/или буксирующего транспортного средства; и/или (d) технические возможности орудия и/или буксирующего транспортного средства. Например, пятый уровень (не показан) сельскохозяйственных данных может содержать информацию о почве, такую как (а) содержание влаги; (b) уплотнение; (c) температура грунта; (d) подъем; (e) глубина; (f) уклон местности; и/или (g) состав почвы. Символы и/или значения для сельскохозяйственных данных могут отображаться через графический пользовательский интерфейс. Сельскохозяйственные данные могут быть обозначены как архивные данные, временные данные, оперативные данные, ожидаемые данные, прогностические данные и т. п.
На Фиг. 10A-10D показаны дополнительные аспекты и/или варианты реализации для добавления, дополнения или иной замены информации GPS для сельскохозяйственной машины. На фигурах беспилотное автономное транспортное средство (UV) 300 показано в сочетании с трактором 100 и орудием 110, которое показано как посадочное орудие. На фигурах UV показано как беспилотный летательный аппарат (БПЛА). БПЛА 300 может представлять собой дрон, такой как летающий дрон. Как следует понимать, БПЛА может быть привязан к трактору 100, орудию 110 или к тому и другому. Привязка БПЛА 300 к машине (-ам) обеспечивает получение информации и может осуществляться в проводном или беспроводном режиме. В беспроводном режиме БПЛА 300 будет передавать информацию машине (-ам) и наоборот, и передаваемая информация может быть использоваться всеми компонентами для дополнения или иного добавления информации, такой как информация GPS.
На фигурах также показан дисплей 150 в тракторе 100, при этом дисплей используют для предоставления информации, относящейся к сельскохозяйственной машине, включая, но не ограничиваясь этим, оперативную информацию, сельскохозяйственную информацию, скорость, оповещения/проблемы, помощь/устранение неполадок, местоположение и т. п. Дисплей не должен иметь ограничивающий характер.
На Фиг. 10A показано, что БПЛА 300 летит на высоте (h1) 306 над машинами. БПЛА может содержать роторы, пропеллеры, тяги и т. п. для обеспечения возможностей полета. Кроме того, БПЛА может содержать датчики, передатчики, приемники, средства связи, процессоры и другие инструменты телеметрии. Совместно они показаны датчиком 304. Согласно раскрытому изобретению, БПЛА 300 может поддерживать связь с источником 302 GPS, таким как спутник или другой механизм.
На фигуре высота 306 может быть задана над машинами таким образом, чтобы БПЛА 300 мог иметь лучшее соединение с источником 302 GPS. Например, некоторые поля или другие местоположения могут находиться в областях, таких как долины или т. п., в которых может не хватать требуемого соединения с источником 302 GPS. Использование БПЛА 300 на высоте, достаточной для приема информации GPS, может быть применено для последующей передачи указанной информации 308 GPS на трактор и/или орудие для отображения и использования на них, например, на дисплее 150 в тракторе 100. Таким образом, использование БПЛА 300 на такой высоте будет дополнять информацию GPS, используемую трактором 100 и/или орудием 110. Известную высоту БПЛА 300 также следует учитывать при определении информации.
На Фиг. 10B БПЛА 300 располагается непосредственно над сеялкой 110 в известном местоположении относительно нее. БПЛА 300 может принимать непосредственную информацию GPS от источника 302 GPS, и известную высоту над сеялкой 110 можно использовать для передачи этой информации на трактор 100 и/или сеялку 110 для дополнения или иного добавления информации GPS машин.
На Фиг. 10C представлен еще один пример того, как БПЛА 300 можно использовать для дополнения или иного добавления информации GPS, используемой трактором 100 и/или сеялкой 110, например, на дисплее 150. На Фиг. 10C местоположение БПЛА 300 может представлять собой по существу любое местоположение относительно трактора 100 и/или сеялки 110 таким образом, что БПЛА 300 может получать информацию GPS от источника 302. БПЛА 300 также может получать информацию с использованием IMU на сеялке, тракторе или самом БПЛА. Использование IMU для получения дополнительной информации еще больше будет дополнять информацию о местоположении машин. Затем полученную информацию от БПЛА 300 можно триангулировать 310 с трактором 100 и/или сеялкой 110, чтобы добавить или заменить информацию GPS, используемую машинами для одной или более сельскохозяйственных операций.
На Фиг. 10D показано, что БПЛА 300 может представлять собой дрон для следующих операций, который используют только при необходимости. Например, БПЛА 300 может храниться на тракторе 100 и/или сеялке 110, и ему может быть отправлено сообщение «активировать», когда для информации о местоположении GPS требуется добавление или замена. Вызов БПЛА 300 отправит БПЛА в одно из местоположений, показанных на Фиг. 10А-С, для получения добавочной информации, чтобы передать ее на машины для добавления местоположения по GPS.
Таким образом, для улучшения данных о местоположении сельскохозяйственной машины, такой как трактор (буксирующее транспортное средство) или орудие, можно использовать набор источников данных. Традиционные формы на практике связаны с самим приемником GPS, причем коррекции обеспечиваются базовыми станциями, модемами сотовой связи и т. д. Если они недоступны или нежелательны, необходимы дополнительные источники данных.
Инерциальный измерительный блок (IMU) может быть использован в сочетании с GPS для обеспечения абсолютного позиционирования, и с накопленными знаниями может использовать измерения IMU для продолжения пространственного отслеживания и работы до тех пор, пока не будет завершен перебой в работе GPS. Использование дополнительного источника отслеживания скорости и направления, такого как датчик скорости вращения колеса, расширяет эту возможность и увеличивает количество времени, в течение которого она действительна.
Другие источники могут быть задействованы для дополнительного повышения точности и продолжительности. Бортовые камеры трактора, лидарные датчики и другие датчики движения.
Из вышеизложенного следует, что раскрытые варианты реализации и/или аспекты решают по меньшей мере все из заявленных задач. Настоящее изобретение не должно ограничиваться конкретными вариантами реализации, описанными в настоящем документе. Кроме того, следует понимать, что любой из аспектов, раскрытых относительно любого из показанных и/или описанных вариантов реализации, может быть объединен с любым из других аспектов и/или вариантов реализации, чтобы обеспечить даже дополнительные варианты реализации, которые раскрыты в настоящем документе. Такие дополнительные варианты реализации очевидны для специалистов в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСПРЕДЕЛЕННЫЕ ДАННЫЕ ПО ГРУНТАМ | 2021 |
|
RU2820406C1 |
| АВТОМАТИЧЕСКИЕ ПАРТНЕРЫ ПО ПОЛЕВЫМ РАБОТАМ | 2021 |
|
RU2824084C1 |
| КОМПЬЮТЕРИЗИРОВАННЫЙ СПОСОБ И СИСТЕМА ДЛЯ ПРИМЕНЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО ОРУДИЯ | 2021 |
|
RU2818807C1 |
| БЛОКИ УПРАВЛЕНИЯ, УЗЛЫ, СИСТЕМА И СПОСОБ ДЛЯ ПЕРЕДАЧИ И ОБМЕНА ДАННЫМИ | 2017 |
|
RU2718991C1 |
| СИСТЕМА РАСПРЕДЕЛЕНИЯ МАССЫ ДЛЯ СЕМЕННЫХ СЕЯЛОК И МАШИН ДЛЯ ВНЕСЕНИЯ ПРОДУКТОВ | 2013 |
|
RU2600182C2 |
| Способ и система для определения механического состояния сельскохозяйственных угодий | 2020 |
|
RU2802808C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ ОРУДИЕ С ЭЛЕКТРОГИДРАВЛИЧЕСКИМИ ЦИЛИНДРАМИ | 2015 |
|
RU2653081C2 |
| СПОСОБ И СИСТЕМЫ ИСПОЛЬЗОВАНИЯ КОЭФФИЦИЕНТА ЗАПОЛНЕНИЯ ИМПУЛЬСОВ ДАТЧИКОВ ДЛЯ ОПРЕДЕЛЕНИЯ РАСХОДА СЕМЯН ИЛИ ЧАСТИЦ | 2020 |
|
RU2816548C2 |
| УСТРОЙСТВА, СПОСОБЫ И СИСТЕМЫ ДЛЯ ОБЕСПЕЧЕНИЯ ПРИЖИМНОГО УСИЛИЯ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО ОРУДИЯ | 2015 |
|
RU2655204C2 |
| СИСТЕМЫ, СПОСОБЫ И/ИЛИ УСТРОЙСТВА ДЛЯ ОБЕСПЕЧЕНИЯ ПОЛЬЗОВАТЕЛЬСКОГО ДИСПЛЕЯ И ИНТЕРФЕЙСА ДЛЯ ИСПОЛЬЗОВАНИЯ С СЕЛЬСКОХОЗЯЙСТВЕННЫМ ОРУДИЕМ | 2017 |
|
RU2730413C1 |
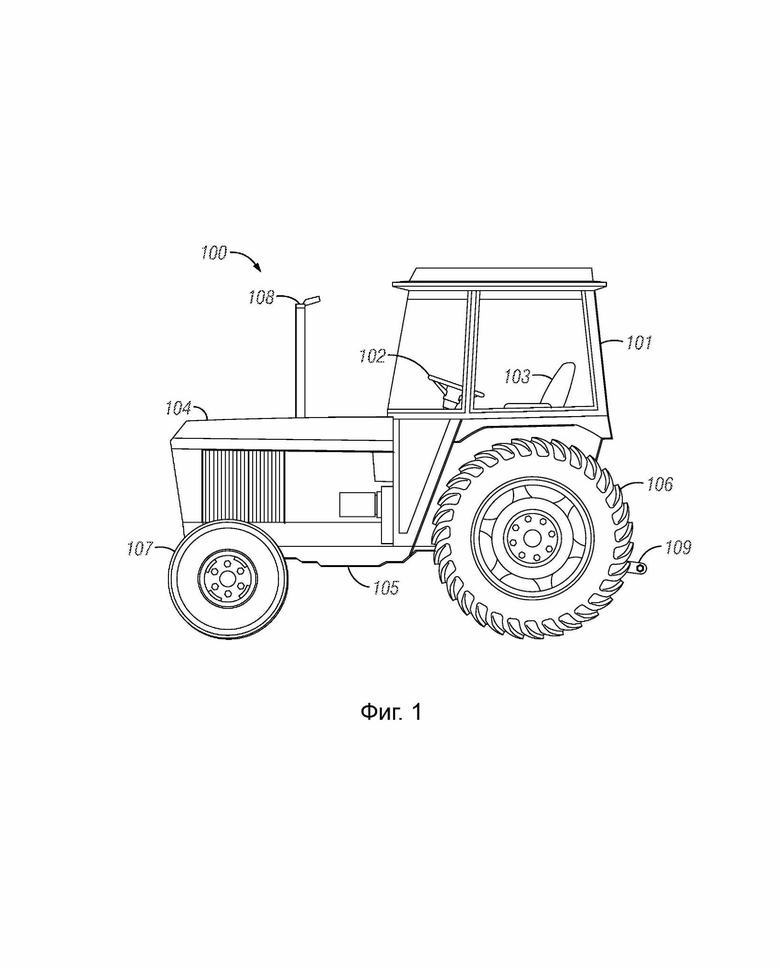
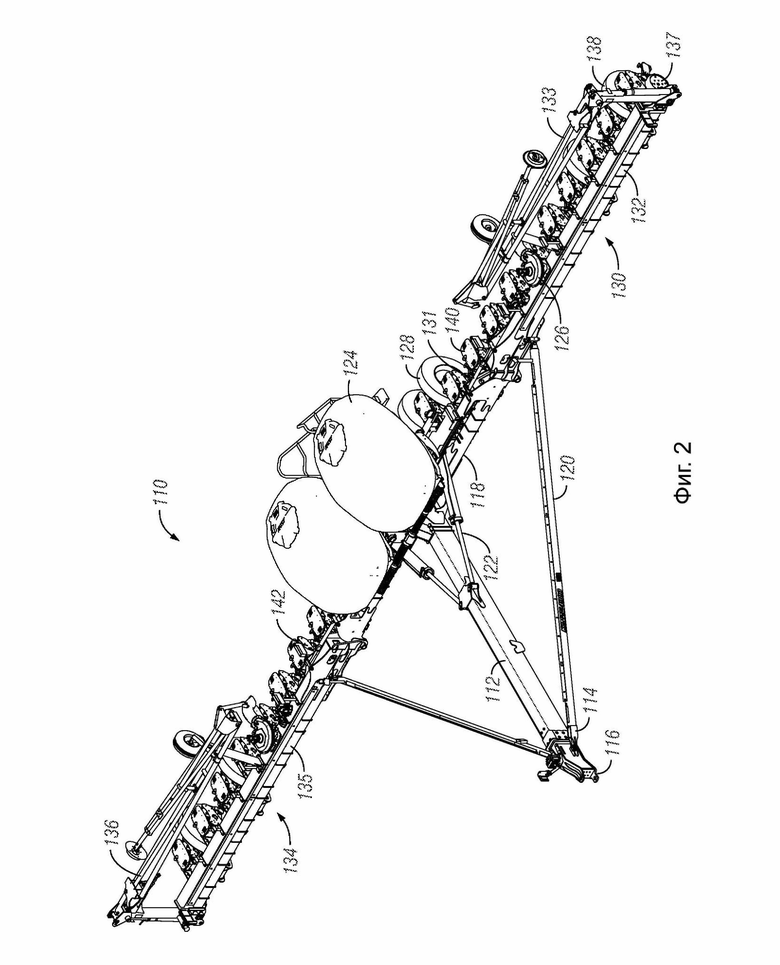
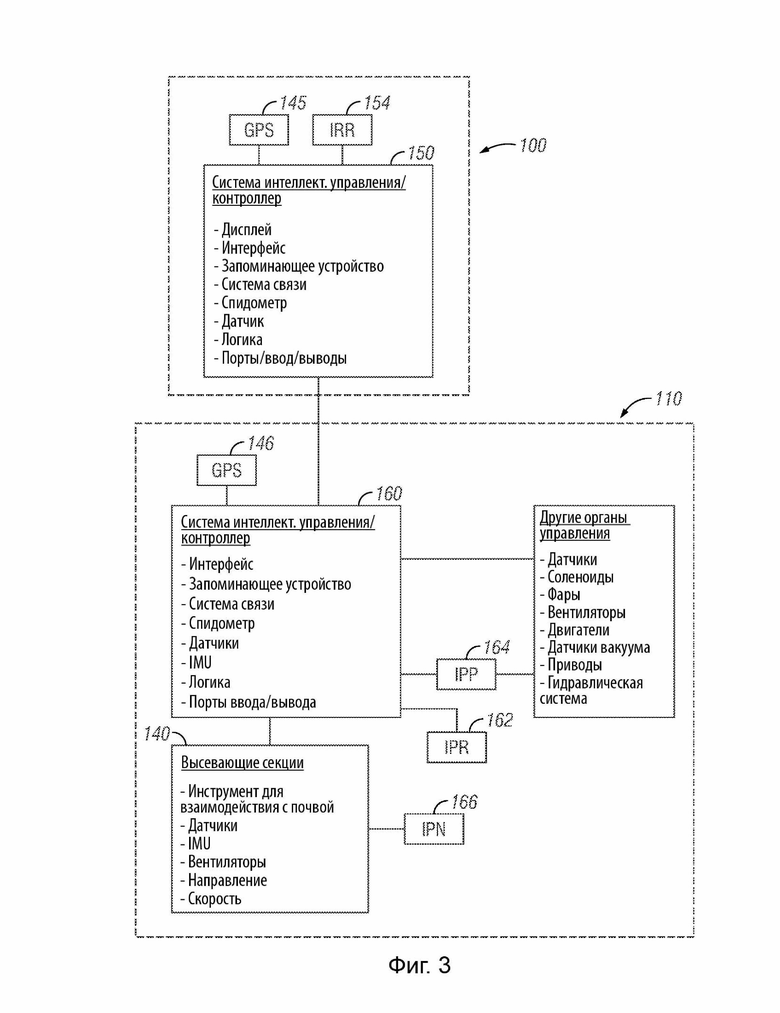
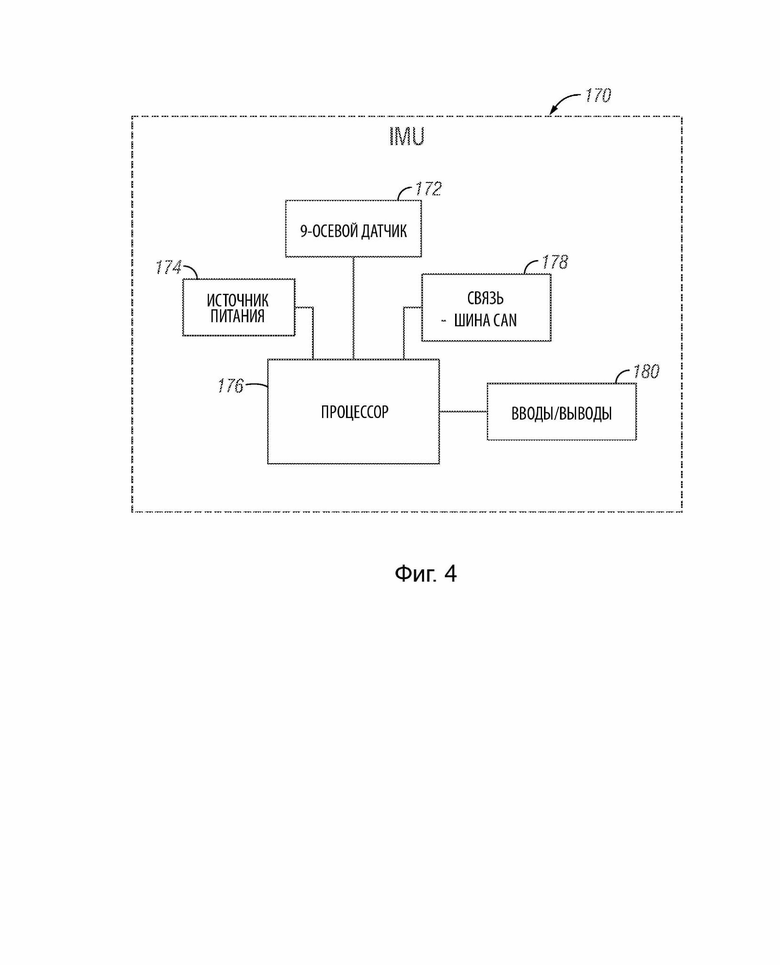
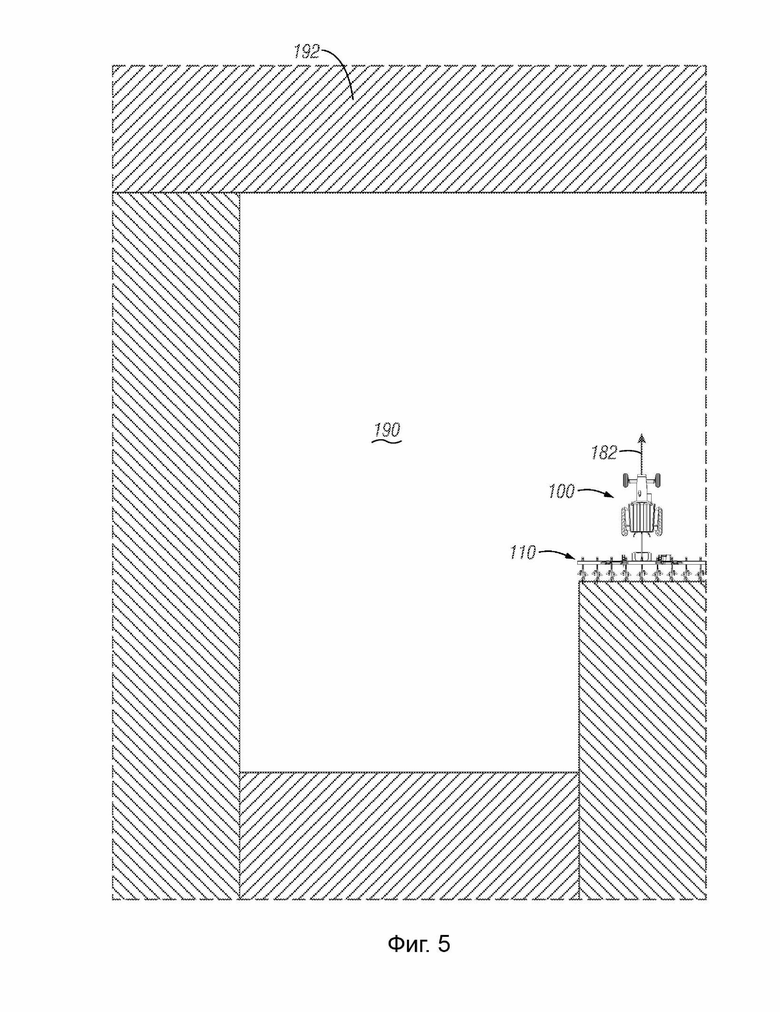
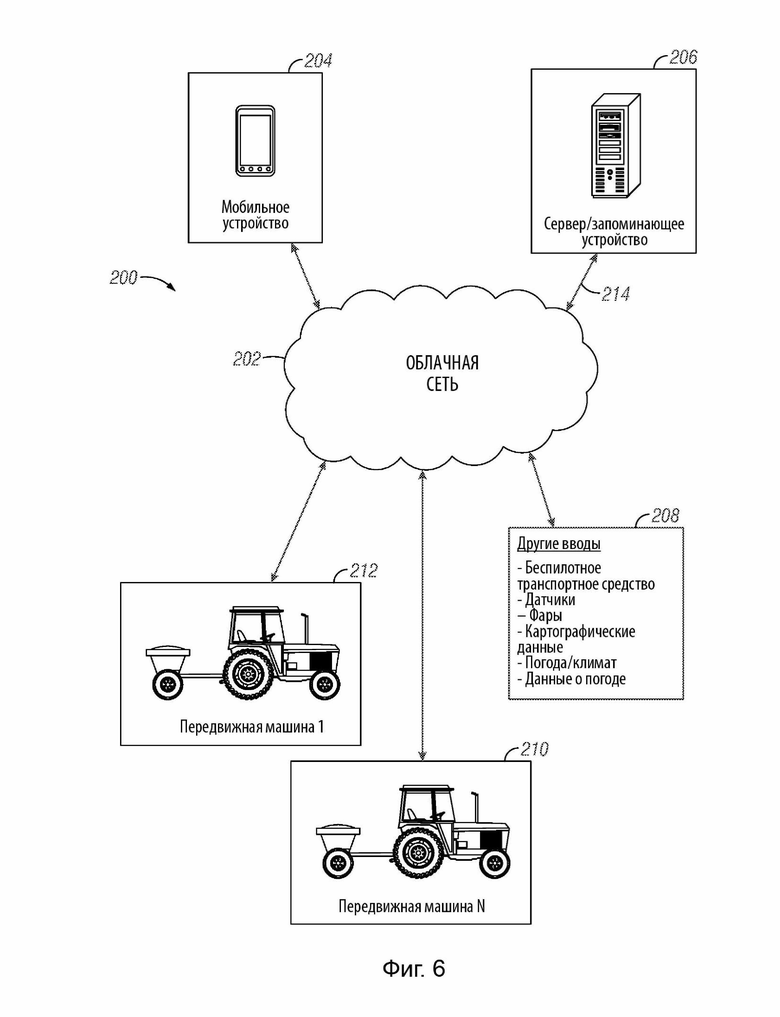

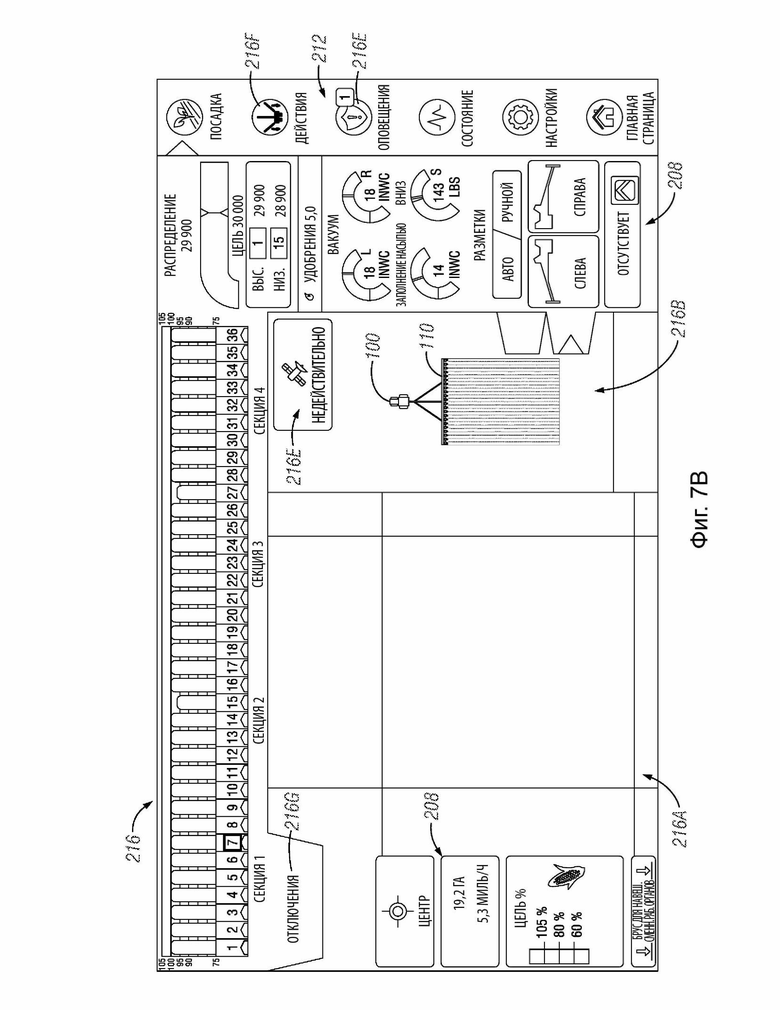
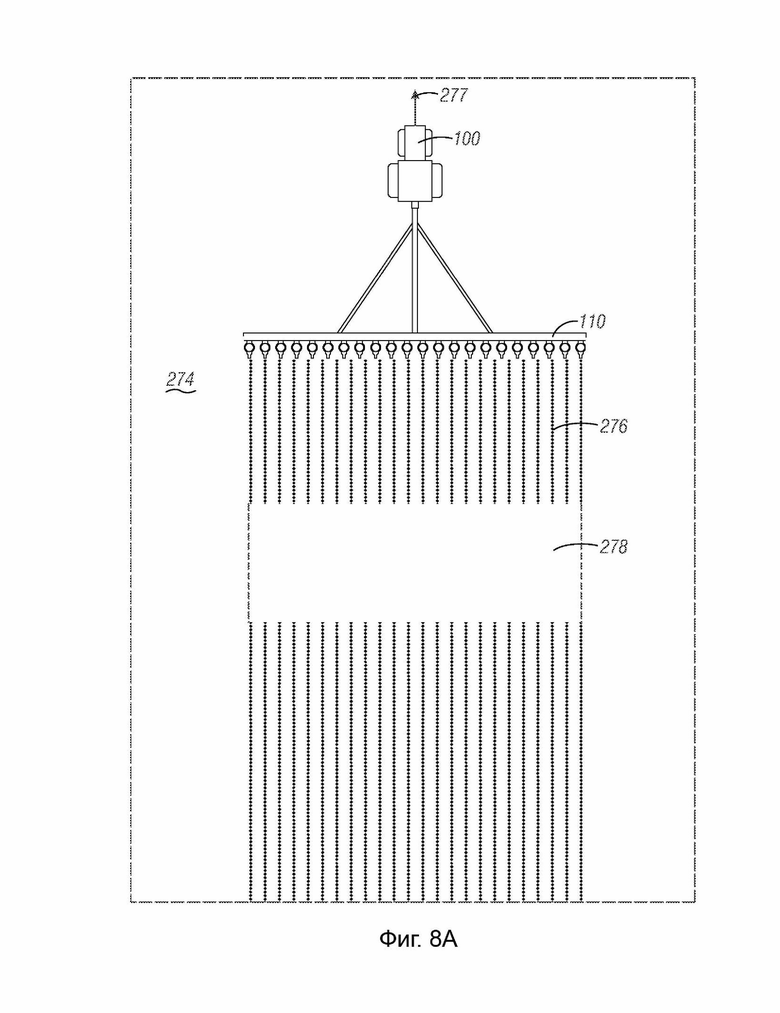
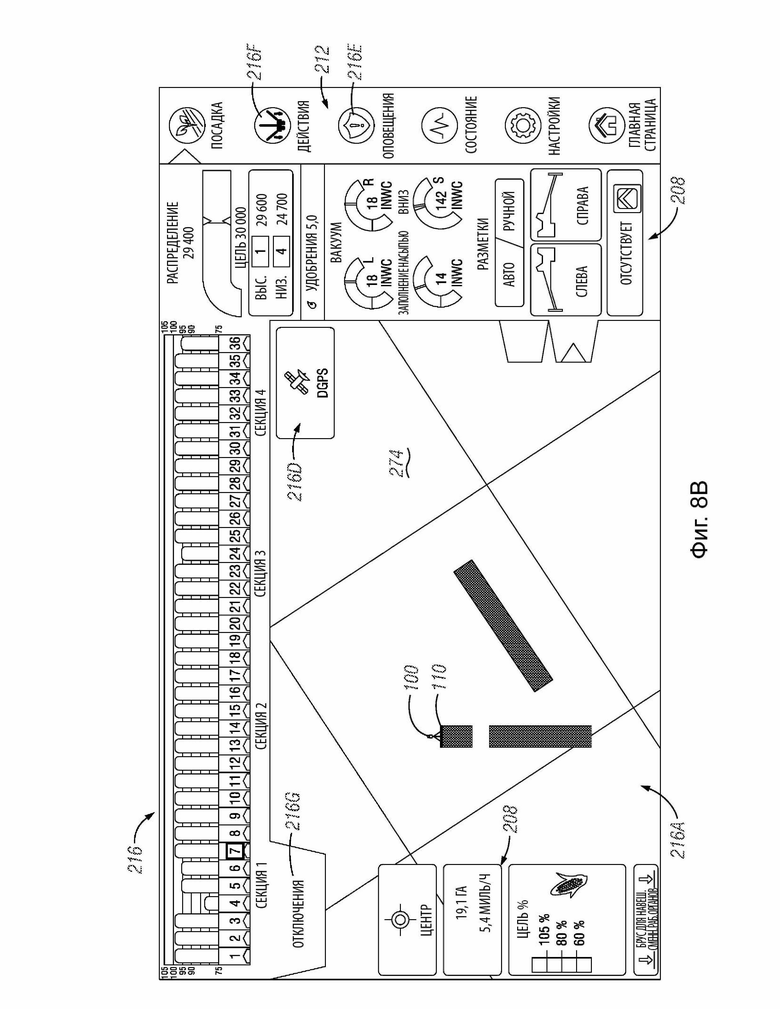
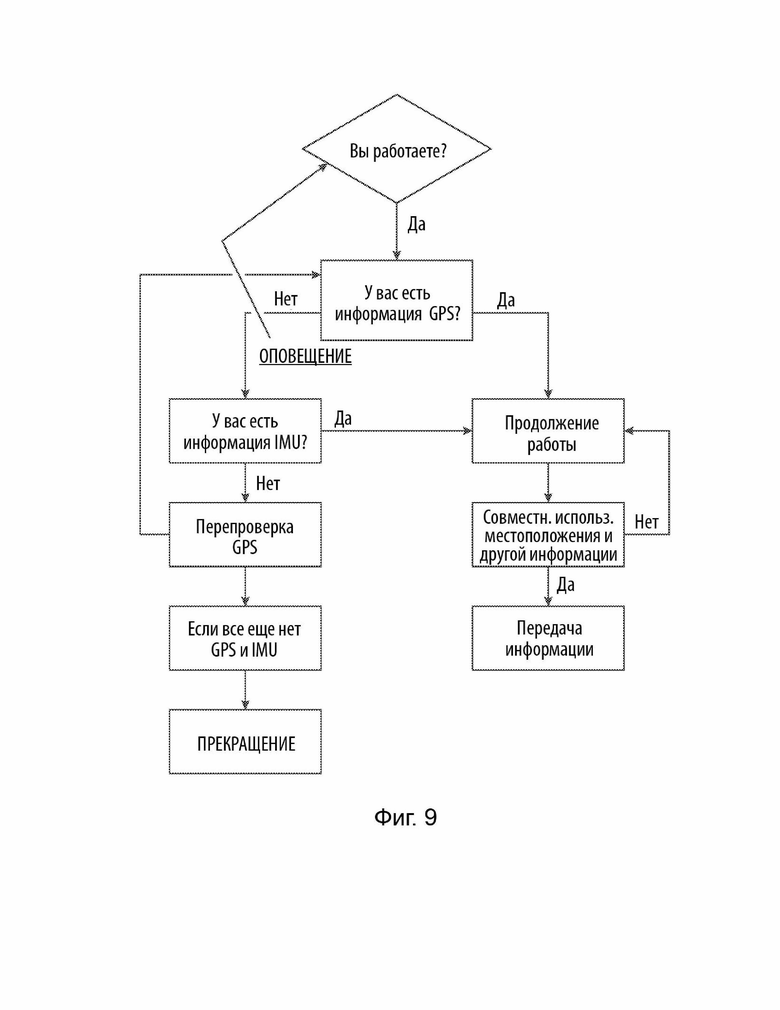
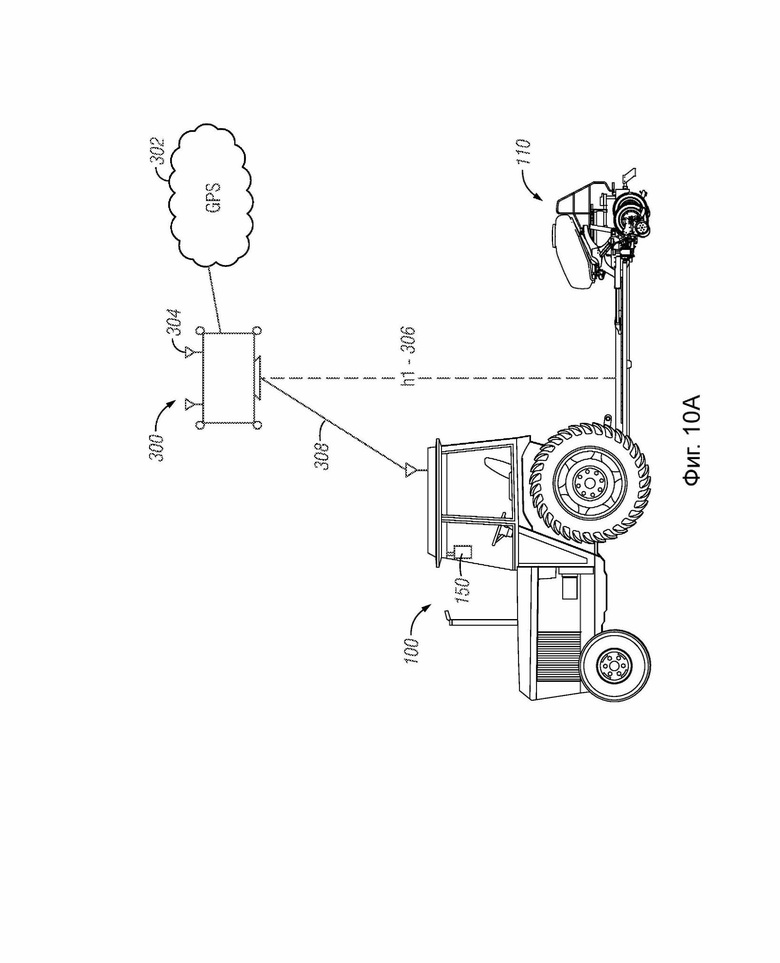
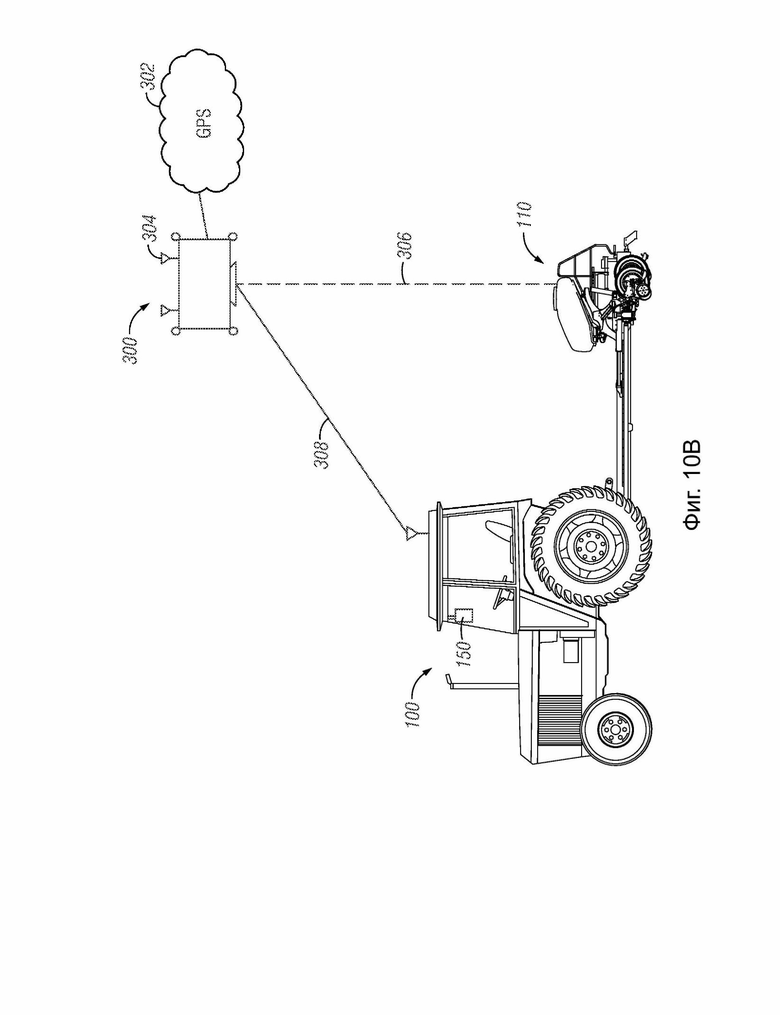
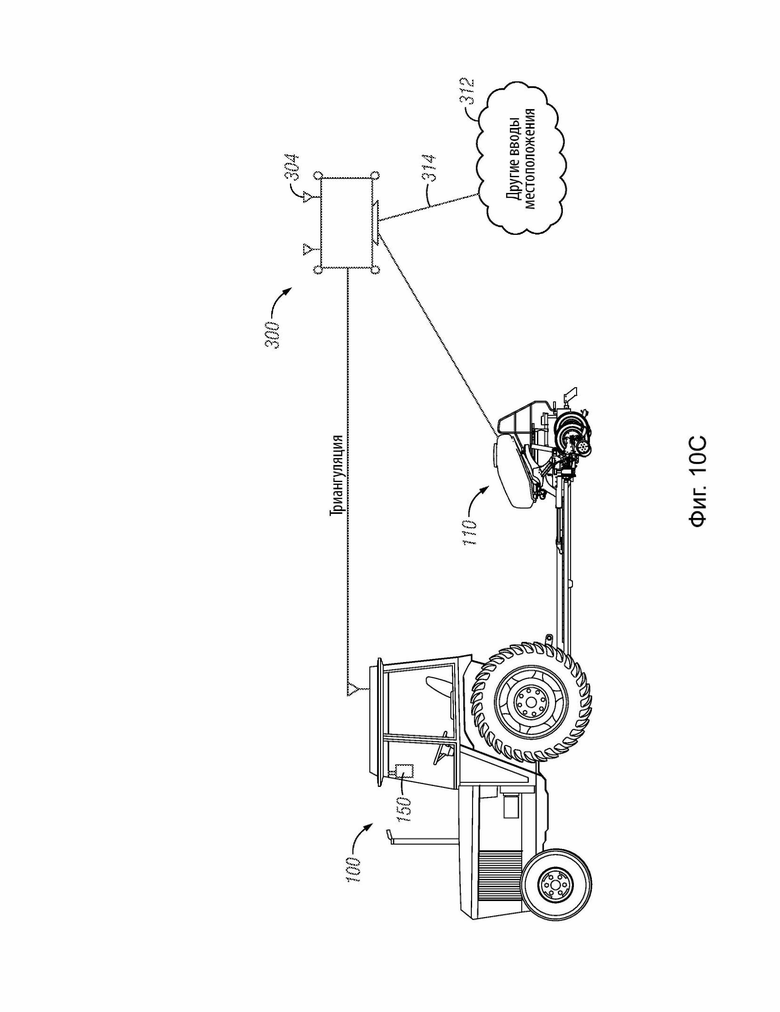
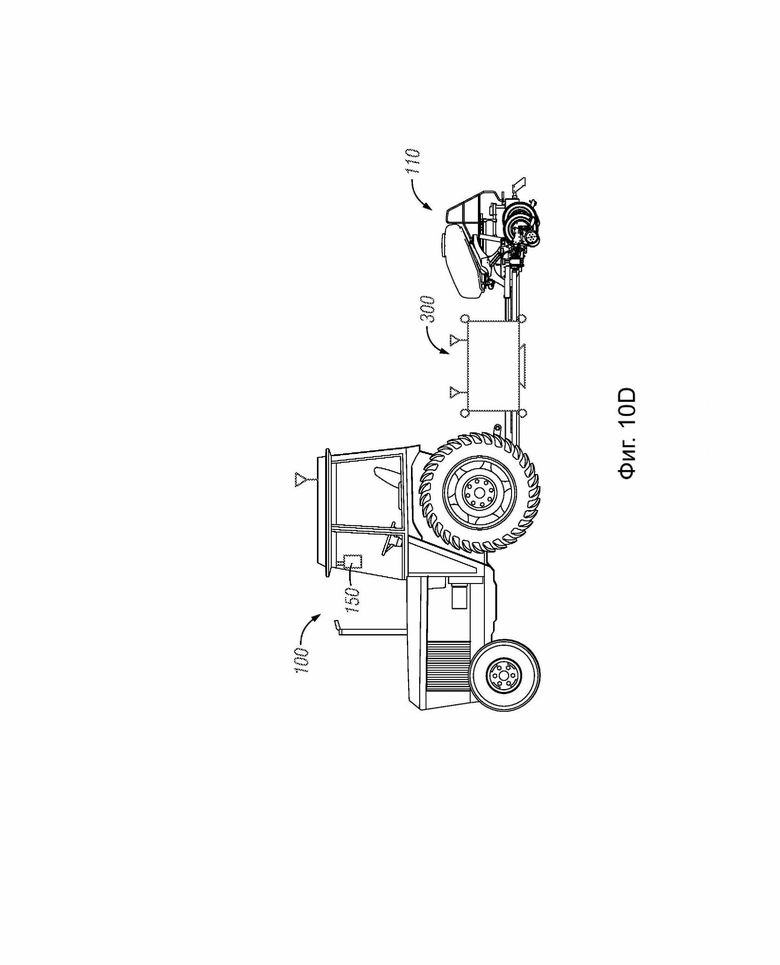
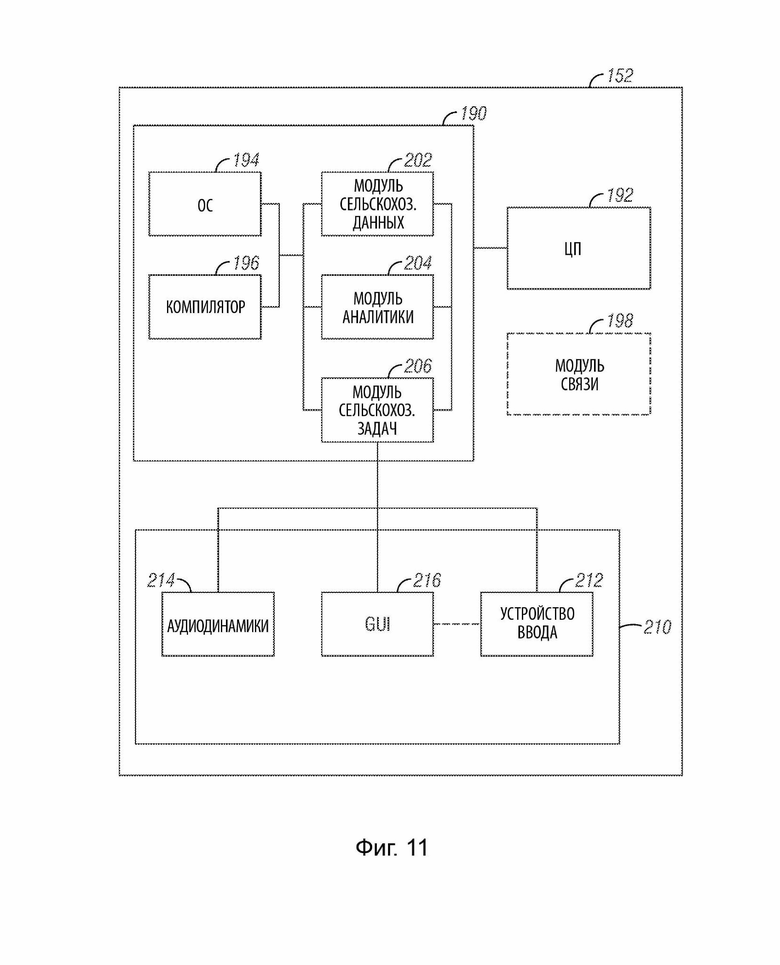
Изобретение относится к сельскому хозяйству. Система определения местоположения сельскохозяйственного орудия, осуществляющая сельскохозяйственную операцию на участке, включает глобальную систему позиционирования (GPS), связанную с сельскохозяйственным орудием, для предоставления информации о местоположении для сельскохозяйственной операции на участке. Информация о местоположении относится к событию сельскохозяйственной операции. Также имеется система дополнения GPS, связанная с сельскохозяйственным орудием. Система дополнения GPS включает инерциальный измерительный блок, расположенный на сельскохозяйственной машине. Инерциальный блок имеет 9-осевой инерциальный измерительный блок с датчиками. Указанный блок дополняет GPS или заменяет GPS во время перебоя в работе GPS. Улучшается определение местоположения. 3 н. и 20 з.п. ф-лы, 11 ил.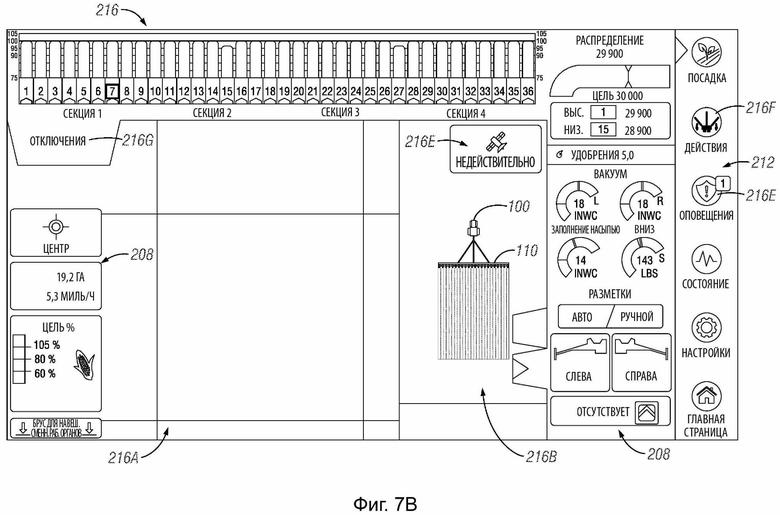
1. Система определения местоположения сельскохозяйственного орудия, выполненная с возможностью осуществления по меньшей мере одной сельскохозяйственной операции на участке, включающая глобальную систему позиционирования (GPS), связанную с сельскохозяйственным орудием, для предоставления информации о местоположении для по меньшей мере одной сельскохозяйственной операции на участке, при этом информация о местоположении относится к событию по меньшей мере одной сельскохозяйственной операции; и
систему дополнения GPS, связанную с сельскохозяйственным орудием, при этом система дополнения GPS включает инерциальный измерительный блок, расположенный на сельскохозяйственной машине, при этом указанный инерциальный блок имеет 9-осевой инерциальный измерительный блок с датчиками и дополняет GPS или заменяет GPS во время перебоя в работе GPS.
2. Система по п. 1, отличающаяся тем, что система дополнения GPS содержит совокупность устройств дополнения GPS, которая включает по меньшей мере инерциальный измерительный блок.
3. Система по п. 2, отличающаяся тем, что совокупность устройств дополнения GPS содержит:
a. один или более датчиков,
b. лидар,
c. спидометры,
d. устройства направления,
e. инерциальные измерительные блоки,
f. камеры,
g. акселерометры,
h. гироскопы и/или
i. магнитометры.
4. Система по п. 1, отличающаяся тем, что система дополнения GPS содержит инерциальный измерительный блок.
5. Система по п. 1, дополнительно содержащая беспилотное транспортное средство (UV), связанное с сельскохозяйственным орудием.
6. Система по п. 5, отличающаяся тем, что UV является частью системы дополнения GPS.
7. Система по п. 5, отличающаяся тем, что UV содержит беспилотный летательный аппарат (БПЛА).
8. Система по п. 1, отличающаяся тем, что по меньшей мере одна сельскохозяйственная операция включает одно или более из:
a. посадки;
b. обработки почвы;
c. прессования;
d. сбора урожая;
e. опрыскивания;
f. транспортировки; и
g. культивации.
9. Система по п. 8, отличающаяся тем, что событие по меньшей мере одной сельскохозяйственной операции включает одно или более из:
a. посадки семян;
b. опрыскивания местоположения;
c. сбора культуры;
d. проезда в местоположение; и
e. укладки кипы.
10. Система по п. 9, дополнительно содержащая систему связи для обмена информацией с другим сельскохозяйственным орудием.
11. Система по п. 10, дополнительно содержащая процессор, связанный с сельскохозяйственным орудием.
12. Система по п. 11, отличающаяся тем, что процессор дает команду на выполнение или невыполнение по меньшей мере одной сельскохозяйственной операции.
13. Система по п. 1, дополнительно содержащая процессор, связанный с GPS, и систему дополнения GPS, при этом процессор может:
применять информацию как от GPS, так и от системы дополнения GPS для предоставления дополненного местоположения; или
применять информацию от системы дополнения GPS, когда GPS недоступна, чтобы продолжать предоставлять информацию о местоположении.
14. Система по п. 13, дополнительно содержащая дисплей, отображающий по меньшей мере одно из информации о местоположении от GPS, объединенной информации о местоположении от GPS и системы дополнения GPS и информации о местоположении от системы дополнения GPS.
15. Способ получения местоположения события сельскохозяйственной операции, выполняемой сельскохозяйственной машиной, включающий:
получение информации о первом местоположении с помощью GPS;
получение информации о втором местоположении с помощью системы дополнения GPS, включающей инерциальный измерительный блок, расположенный на сельскохозяйственной машине, при этом указанный инерциальный измерительный блок имеет 9-осевой инерциальный измерительный блок с датчиками; и
применение информации о первом и втором местоположении путем:
применения информации о первом и втором местоположении как от GPS, так и от системы дополнения GPS для обеспечения местоположения события; или
применения информации о первом и втором местоположении от системы дополнения GPS, когда GPS недоступна для обеспечения местоположения события.
16. Способ по п. 15, дополнительно включающий отображение местоположения события на пользовательском дисплее.
17. Способ по п. 16, отличающийся тем, что, когда GPS недоступна, отображение местоположения события на основе системы дополнения GPS отличается от отображения местоположения с применением как GPS, так и системы дополнения GPS.
18. Способ по п. 16, дополнительно включающий сохранение местоположения события в запоминающем устройстве с указанием даты и времени.
19. Способ по п. 15, дополнительно включающий соединение беспилотного транспортного средства с сельскохозяйственной машиной для содействия в получении местоположения события.
20. Способ по п. 19, отличающийся тем, что беспилотное транспортное средство представляет собой беспилотный летательный аппарат.
21. Способ по п. 15, дополнительно включающий совместное использование местоположения события со второй сельскохозяйственной машиной.
22. Способ по п. 21, отличающийся тем, что контроллер второй сельскохозяйственной машины применяет местоположение события для управления работой второй сельскохозяйственной машины.
23. Система определения местоположения сельскохозяйственного события, выполняемого сельскохозяйственной машиной, содержащая:
глобальную систему позиционирования (GPS); и
систему дополнения GPS, включающую инерциальный измерительный блок, расположенный на сельскохозяйственной машине, при этом указанный инерциальный измерительный блок имеет
9-осевой инерциальный измерительный блок с датчиками;
при этом система дополнения GPS содержит беспилотный летательный аппарат (БПЛА), связанный с сельскохозяйственной машиной, причем указанный БПЛА сообщает свое положение сельскохозяйственной машине для:
добавления местоположения, определенного GPS; или
его применения вместо GPS, когда GPS недоступна.
| US 2016366815 A1, 22.12.2016 | |||
| US 5878371 А1, 02.03.1999 | |||
| US 2017315555 А1, 02.11.2017 | |||
| WO 2015120470 A1, 13.08.2015 | |||
| СПОСОБ ОБЪЕДИНЕННОГО ИСПОЛЬЗОВАНИЯ ЛОКАЛЬНОЙ СИСТЕМЫ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ, ЛОКАЛЬНОЙ СИСТЕМЫ RTK И РЕГИОНАЛЬНОЙ, ШИРОКОДИАПАЗОННОЙ ИЛИ ГЛОБАЛЬНОЙ СИСТЕМЫ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПО ИЗМЕРЕНИЮ НЕСУЩЕЙ ФАЗЫ ЧАСТОТЫ | 2007 |
|
RU2438141C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДАЧИ СИГНАЛА ОПЕРАТОРУ СЕЛЬСКОХОЗЯЙСТВЕННОГО ОРУДИЯ, ЧТО СЕЛЬСКОХОЗЯЙСТВЕННОЕ ОРУДИЕ ПРОХОДИТ РАНЕЕ ЗАСЕЯННУЮ ОБЛАСТЬ | 2011 |
|
RU2556054C2 |

