ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к приведению в действие двигателя с постоянными магнитами, и, в частности, к способу и устройству управления без датчика положения для двигателя с постоянными магнитами с приведением в действие посредством длинного кабеля.
УРОВЕНЬ ТЕХНИКИ
Двигатель с постоянными магнитами широко используется в промышленности ввиду его высокой удельной мощности, высокого выходного крутящего момента и высокой эффективности. Что касается нефтяной промышленности, существует тенденция замены асинхронных двигателей на двигатели с постоянными магнитами для того, чтобы повысить эффективность, снизить энергопотребление и уменьшить общий размер двигателей. Поскольку двигатели, используемые в погружном электроцентробежном насосе (ЭЦН), находятся далеко от рабочей платформы во время эксплуатации, двигатели с постоянными магнитами соединены с преобразователями длинными кабелями. Учитывая потери в кабелях I2R, для повышения напряжения и снижения силы тока используется повышающий трансформатор. Для подавления отражения напряжения и перенапряжения в кабелях необходимы синусоидальные фильтры или индуктивно-емкостные фильтры. Вследствие использования длинных кабелей, трансформатора и синусоидального фильтра представляется трудным получать необходимый сигнал положения для двигателей с постоянными магнитами, а также представляется трудным применять традиционные способы управления без датчика положения, особенно в режиме ожидания или при низкой скорости.
Ввиду отсутствия эффективного способа управления без датчика положения в неподвижном состоянии или при низкой скорости, может быть использован только разомкнутый способ управления для приведения в действие двигателей с постоянными магнитами в промышленных устройствах (патентные заявки США US 13/868,216, US 14/565,781). Поскольку крутящий момент нагрузки погружного электроцентробежного насоса является большим и резко изменяется во время запуска, погружной электроцентробежный насос, приводимый в действие двигателем с постоянными магнитами, часто подвержен несинхронизированному сбою.
В традиционном индуктивном способе управления без датчика положения высокочастотный сигнал обнаружения генерируется переключателем питания. Однако в двигателе с постоянными магнитами с приведением в действие посредством длинного кабеля высокочастотный сигнал обнаружения, генерируемый переключателем питания, сильно подавляется при прохождении через повышающий трансформатор в цепи. Большая часть энергии, содержащейся в сигнале обнаружения, потребляется в трансформаторе и синусоидальном фильтре, при этом в обмотке двигателя течет малая часть энергии, а получение сигнала положения ротора не осуществляется.
Технология мультиплексирования с разделением по частоте (Frequency Division Multiplexing, FDM) является одной из широко используемых технологий в коммуникационной инженерии, которая делит канал передачи информации на несколько непересекающихся подканалов. Каждый сигнал занимает одну из полос частот, а многоканальные сигналы делятся на приемной клемме с использованием соответствующих полосовых фильтров для того, чтобы восстановить требуемые сигналы.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задачи настоящего изобретения заключаются в обеспечении способа и устройства управления без датчика положения для двигателя с постоянными магнитами с приведением в действие посредством длинного кабеля, которые могут расширить диапазон регулирования скорости двигателя и повысить точность определения положения.
Техническая схема, вводимая в соответствии с настоящим изобретением, является следующей: способ управления без датчика положения для двигателя с постоянными магнитами с приведением в действие посредством длинного кабеля, в котором между повышающим трансформатором и двигателем с постоянными магнитами добавляют цепь связи, и высокочастотные сигналы обнаружения с различными частотами передают в кабель питания и обмотки двигателя посредством трех трансформаторов связи в цепи связи, соответственно, а затем получают высокочастотные составляющие напряжения отклика в первичных обмотках трех трансформаторов связи посредством полосовых фильтров, и, наконец, получают сигналы положения, согласно соотношениям между эффективными значениями высокочастотных составляющих напряжения. Контроллер может осуществлять управление двигателем без датчика положения, согласно сигналам положения.
Высокочастотные сигналы обнаружения генерируются независимыми источниками сигналов, и высокочастотные сигналы обнаружения и основная приводная мощность ШИМ подвергаются мультиплексированию с разделением по частоте в силовом кабеле и обмотках двигателя с постоянными магнитами.
Между повышающим трансформатором и точкой ввода высокочастотных сигналов обнаружения предусмотрено устройство для захвата высокочастотной сигнальной волны для предотвращения попадания части высокочастотного сигнала в электрическую сеть и инвертор через повышающий трансформатор, за счет чего электрическая сеть и инвертор не будут воздействовать на высокочастотный сигнал.
Устройство для реализации способа управления без датчика положения для двигателя с постоянными магнитами с приведением в действие посредством длинного кабеля содержит источник питания, инвертор, три синусоидальных фильтра, три трансформатора связи, длинный кабель и двигатель с постоянными магнитами, при этом все они соединены последовательно. Инвертор приводится в действие контроллером. Цепь связи, соединяющая цепь высокочастотного сигнала обнаружения с цепью главного питания, расположена между повышающим трансформатором и кабелем. Входная клемма цепи связи соединена с высокочастотными сигналами обнаружения, частота которых установлена контроллером, а выходная клемма цепи связи соединена с контроллером посредством полосового фильтра для выдачи высокочастотной составляющей напряжения трехфазной цепи.
Каждая из трехфазных выходных клемм вторичной обмотки повышающего трансформатора, соответственно, снабжена устройством для захвата высокочастотной сигнальной волны, за счет чего разность высокочастотных составляющих напряжения в каждой фазе не подвергается воздействию со стороны электрической сети и переключателя питания.
Каждое из устройств для захвата высокочастотной сигнальной волны состоит из индукторов и конденсаторов, соединенных параллельно. Одна клемма устройства для захвата соединена с одной фазой вторичной обмотки повышающего трансформатора, а другая клемма соединена с одной фазой кабеля.
Цепь связи содержит три комплекта цепей трансформатора связи, причем первый комплект цепи трансформатора связи содержит первый трансформатор, и одна клемма вторичной обмотки первого трансформатора соединена с фазой А трехфазного напряжения, а другая клемма соединена с фазой B трехфазного напряжения посредством первого конденсатора. Второй комплект цепи трансформатора связи содержит второй трансформатор, одна клемма вторичной обмотки второго трансформатора соединена с фазой С трехфазного напряжения, а другая клемма соединена с фазой А посредством второго конденсатора. Третий комплект цепи трансформатора связи содержит третий трансформатор, одна клемма вторичной обмотки третьего трансформатора соединена с фазой B трехфазного напряжения, а другая клемма соединена с фазой C трехфазного напряжения посредством третьего конденсатора. Источник сигнала содержит первый источник сигнала, соединенный с первичной обмоткой первого трансформатора, второй источник сигнала, соединенный с первичной обмоткой второго трансформатора, и третий источник сигнала, соединенный с первичной обмоткой третьего трансформатора. Полосовой фильтр содержит первый полосовой фильтр и второй полосовой фильтр (102), соответственно соединенные с первичной обмоткой первого трансформатора, и третий полосовой фильтр и четвертый полосовой фильтр, соответственно соединенные с первичной обмоткой второго трансформатора, и пятый полосовой фильтр и шестой полосовой фильтр, соответственно соединенные с первичной обмоткой третьего трансформатора.
Первый полосовой фильтр и шестой полосовой фильтр имеют одинаковую полосу пропускания, обозначенную Δƒ2, и второй полосовой фильтр и четвертый полосовой фильтр имеют одинаковую полосу пропускания, обозначенную Δƒ3, и третий полосовой фильтр и пятый полосовой фильтр имеют одинаковую полосу пропускания, обозначенную Δƒ1, а Δƒ1, Δƒ2 и Δƒ3 не пересекаются друг с другом.
Способ и устройство управления без датчика положения для двигателя с постоянными магнитами с приведением в действие посредством длинного кабеля, согласно настоящему изобретению, обладают следующими полезными эффектами:
1. Изобретение преодолевает недостатки слабого эффекта управления в способе обратной ЭДС при низкой скорости и нулевой скорости, а также ограничение, заключающееся в том, что традиционный способ индуктивности не может быть использован в двигателе с приведением в действие посредством длинного кабеля, увеличивает диапазон регулирования скорости двигателя и повышает точность определения положения ротора.
2. Высокочастотные сигналы трех частот могут быть соединены в цепи одновременно, а высокочастотные составляющие напряжения разных частот в каждом напряжении клеммы фазы могут быть получены в режиме реального времени посредством полосовых фильтров. Путем сравнения, положение ротора двигателя с постоянными магнитами может быть получено в режиме реального времени, что облегчает более точное управление двигателем с постоянными магнитами.
3. Цепь связи, согласно изобретению, представляет собой не только канал, по которому высокочастотный сигнал обнаружения поступает в кабель питания двигателя, но также канал, по которому высокочастотная составляющая напряжения на клемме двигателя поступает в полосовой фильтр, тем самым предотвращая использование датчика напряжения и снижая стоимость системы и объем системы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
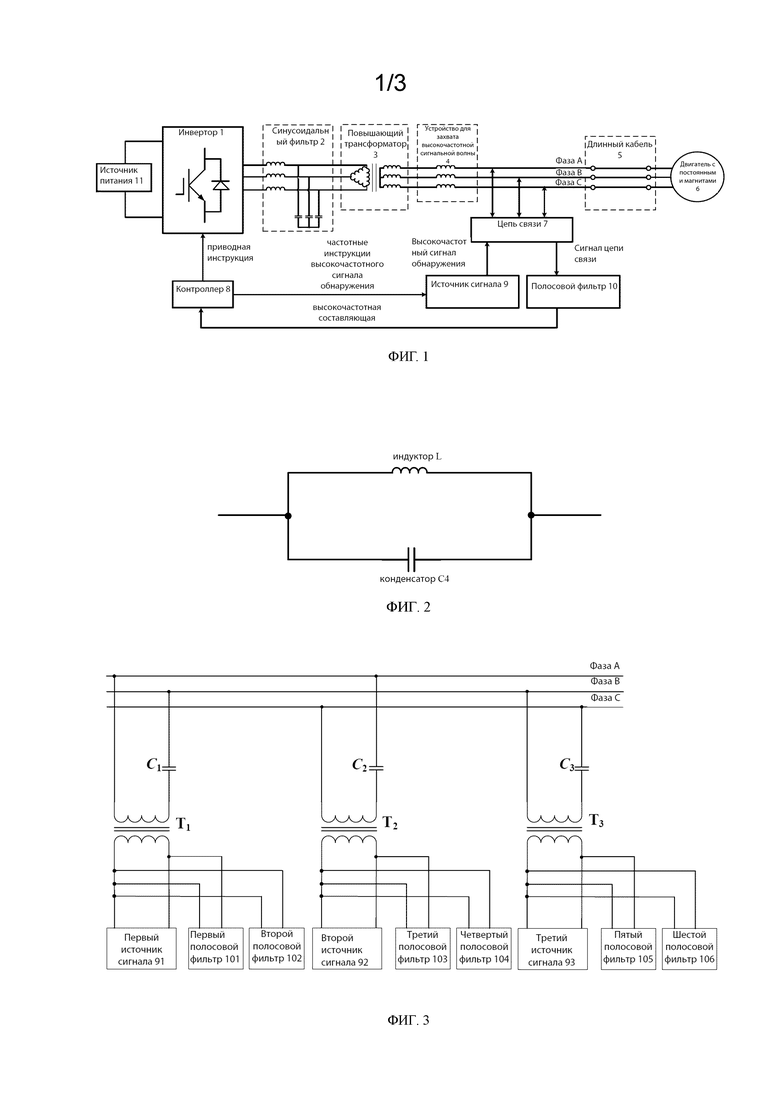
Фиг. 1 представляет собой блок-схему устройства управления без датчика положения для двигателя с постоянными магнитами с приведением в действие посредством длинного кабеля согласно настоящему изобретению.
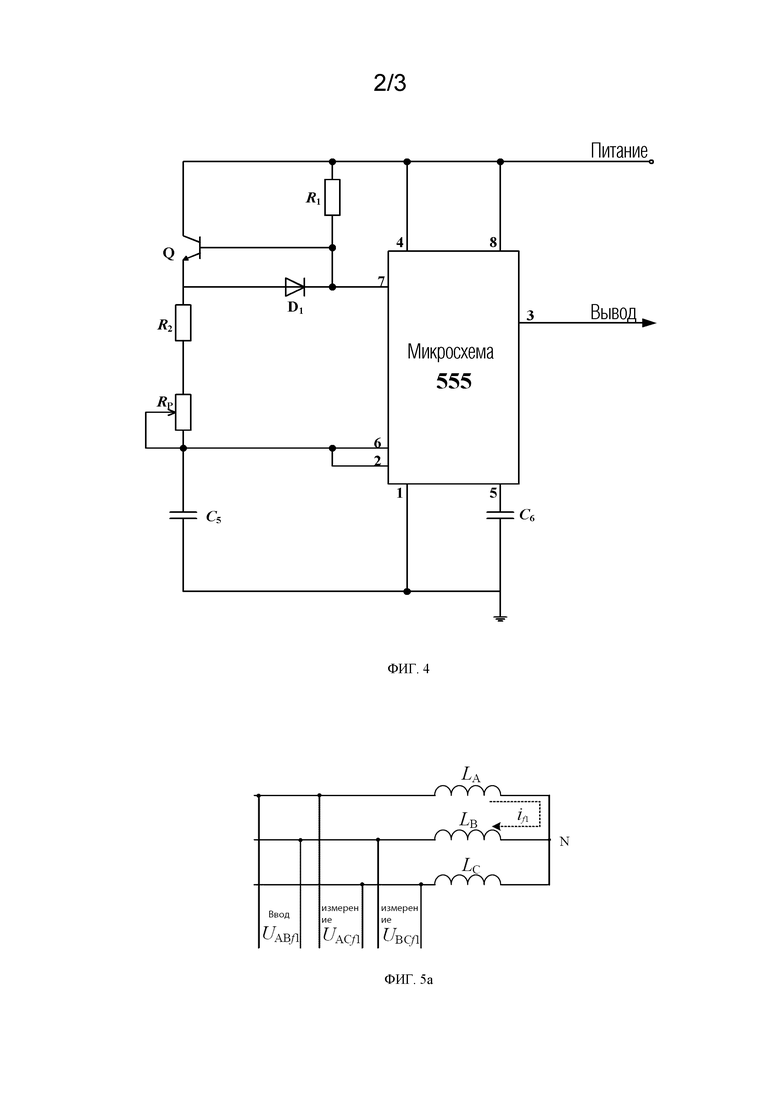
Фиг. 2 представляет собой блок-схему цепи устройства для захвата высокочастотной сигнальной волны в устройстве, согласно настоящему изобретению.
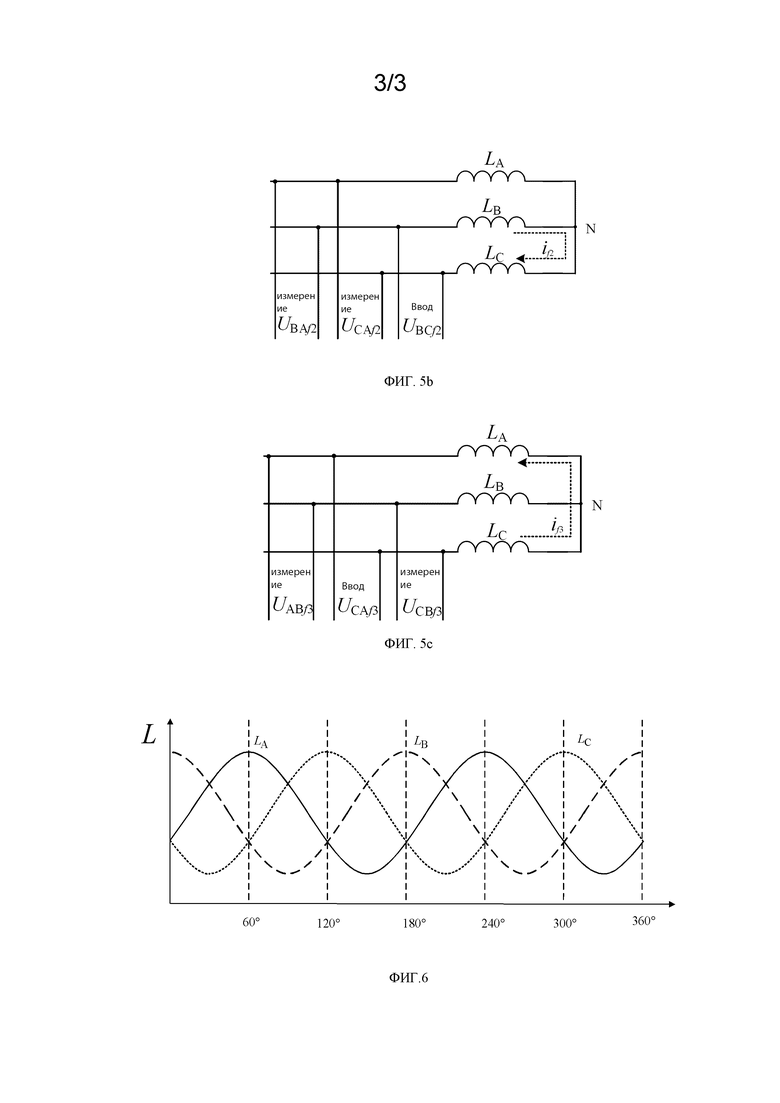
Фиг. 3 представляет собой блок-схему устройства, содержащего цепи связи, источники сигнала и полосовые фильтры, согласно настоящему изобретению.
Фиг. 4 представляет собой блок-схему цепи источника сигнала в устройстве, согласно настоящему изобретению.
Фиг. 5a представляет собой блок-схему, на которой показано сравнение значений индуктивности обмотки фазы A и фазы B.
Фиг. 5b представляет собой блок-схему, на которой показано сравнение значений индуктивности обмотки фазы B и фазы C.
Фиг. 5с представляет собой блок-схему, на которой показано сравнение значений индуктивности обмотки фазы С и фазы А.
На фиг. 6 показана соответствующая зависимость между разностью трехфазных обмоток и положением ротора.
При этом:
1: Инвертор 2: Синусоидальный фильтр
3: Повышающий трансформатор 4: Устройство для захвата высокочастотной сигнальной волны
5: Длинный кабель 6: Двигатель с постоянными магнитами
7: Цепь связи 8: Контроллер
9: Источник сигнала 91: Первый источник сигнала
92: Второй источник сигнала 93: Третий источник сигнала
10: Полосовой фильтр 101: Первый полосовой фильтр
102: Второй полосовой фильтр 103: Третий полосовой фильтр
104: Четвертый полосовой фильтр 105: Пятый полосовой фильтр
106: Шестой полосовой фильтр 11: Источник питания
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ РЕАЛИЗАЦИИ
Изобретение будет подробно описано ниже со ссылкой на чертежи в сочетании с вариантами реализации.
Способ управления без датчика положения для двигателя с постоянными магнитами с приведением в действие посредством длинного кабеля, согласно настоящему изобретению, заключается в следующем: добавление цепи связи после повышающих трансформаторов в цепи приведения в действие посредством длинного кабеля двигателя с постоянными магнитами и передачу трех высокочастотных сигналов обнаружения с разными частотами в кабель питания и обмотки двигателя посредством трех трансформаторов связи в цепи связи, соответственно; получение высокочастотных составляющих напряжения на первичных обмотках трех трансформаторов связи посредством полосового фильтра и получение сигналов положения, согласно соотношениям между эффективными значениями высокочастотных составляющих напряжения; и, наконец, выполнение управления двигателем без датчика положения контроллером согласно полученным сигналам положения.
Высокочастотный сигнал обнаружения генерируется независимым источником сигнала, и высокочастотный сигнал обнаружения и контур основного питания подвергаются мультиплексированию с разделением по частоте с кабелем и обмоткой питания двигателя с постоянными магнитами.
Устройство для захвата высокочастотной сигнальной волны между повышающим трансформатором и точкой ввода высокочастотного сигнала обнаружения предназначено для предотвращения попадания части высокочастотного сигнала в электрическую сеть и инвертор через повышающий трансформатор, за счет чего разница высокочастотных составляющих напряжения в каждой фазе не подвергается воздействию со стороны электрической сети и переключателя питания.
Как показано на фиг. 1, устройство для реализации способа управления без датчика положения для двигателя с постоянными магнитами с приведением в действие посредством длинного кабеля, согласно настоящему изобретению, содержит инвертор 1, синусоидальный фильтр 2, повышающий трансформатор 3, длинный кабель 5 и двигатель 6 с постоянными магнитами, которые соединены последовательно; и входная клемма сигнала инвертора 1 соединена с контроллером 8 для выдачи управляющих инструкций, а входная клемма питания инвертора 1 соединена с источником 11 питания. Цепь 7 связи, выдающая высокочастотные сигналы обнаружения на двигатель 6 с постоянными магнитами и получающая высокочастотные составляющие напряжения трехфазных выходных клемм вторичной обмотки повышающего трансформатора 3, расположена между трехфазными выходными клеммами вторичной обмотки повышающего трансформатора 3 и трехфазными входными клеммами длинного кабеля 5. Входная клемма цепи 7 связи соединена с контроллером 8 посредством источника 9 сигнала для получения частотных инструкций высокочастотных сигналов обнаружения, а выходная клемма цепи 7 связи соединена с контроллером 8 посредством полосового фильтра для выдачи высокочастотной составляющей напряжения трехфазных выходных клемм вторичной обмотки повышающего трансформатора 3 контроллеру 8.
Трехфазные выходные клеммы вторичной обмотки повышающего трансформатора 3, соответственно, снабжены устройством 4 для захвата высокочастотной сигнальной волны для того, чтобы разность высокочастотных составляющих напряжения в каждой фазе не была подвержена воздействию со стороны электрической сети и инвертора.
Как показано на фиг. 2, каждое устройство 4 для захвата высокочастотной сигнальной волны состоит из индуктора L и четвертого конденсатора C4, соединенных параллельно. Одна клемма устройства для захвата высокочастотной сигнальной волны соединена с однофазной выходной клеммой из трехфазных выходных клемм вторичной обмотки повышающего трансформатора 3, а другая клемма соединена с одной фазой входной клеммы длинного кабеля 5 и цепью 7 связи.
Как показано на фиг. 3, цепь 7 связи содержит три комплекта цепей трансформатора, причем первый комплект цепи трансформатора содержит первый трансформатор T1 связи, и одна клемма вторичной обмотки первого трансформатора T1 связи соединена с фазой А трехфазного напряжения, а другая клемма соединена с фазой В трехфазного напряжения посредством первого конденсатора С1. Второй комплект цепи трансформатора содержит второй трансформатор T2 связи, одна клемма вторичной обмотки второго трансформатора T2 связи соединена с фазой C трехфазного напряжения, а другая клемма соединена с фазой A посредством второго конденсатора С2. Третий комплект цепи трансформатора содержит третий трансформатор T3 связи, одна клемма вторичной обмотки третьего трансформатора T3 связи соединена с фазой B, а другая клемма соединена с фазой C посредством третьего конденсатора C3. Источник 9 сигнала содержит первый источник 91 сигнала, соединенный с первичной обмоткой первого трансформатора T1 связи, второй источник 92 сигнала, соединенный с первичной обмоткой второго трансформатора T2 связи, и третий источник 93 сигнала, соединенный с первичной обмоткой третьего трансформатора Т3 связи. Полосовой фильтр 10 содержит первый полосовой фильтр 101 и второй полосовой фильтр 102, соответственно, соединенные с первичной обмоткой первого трансформатора T1 связи, и третий полосовой фильтр 103 и четвертый полосовой фильтр 104, соответственно, соединенные с первичной обмоткой второго трансформатора T2 связи, и пятый полосовой фильтр 105 и шестой полосовой фильтр 106, соответственно, соединенные с первичной обмоткой третьего трансформатора T3 связи.
Первый полосовой фильтр 101 и шестой полосовой фильтр 106 имеют одинаковую полосу пропускания, обозначенную Δƒ2, и второй полосовой фильтр 102 и четвертый полосовой фильтр 104 имеют одинаковую полосу пропускания, обозначенную Δƒ3, а третий полосовой фильтр 103 и пятый полосовой фильтр 105 имеют одинаковую полосу пропускания, обозначенную Δƒ1, а Δƒ1, Δƒ2 и Δƒ3 не пересекаются друг с другом.
Микросхемы типа AD9834, AD9951 и AD9951 могут быть использованы в источнике 9 высокочастотного сигнала. На фиг. 4 показана структура цепи источника 9 высокочастотного сигнала.
Микросхемы типа CF61A4801C, CF61A8001C и CF61A8701 могут быть использованы в полосовом фильтре от первого до шестого 101, 102, 103, 104, 105, 106.
Как показано на фиг. 1, двигатель представляет собой двигатель с постоянными магнитами, приводимый в действие посредством длинного кабеля. На фигуре можно увидеть, что система ввода независимого высокочастотного сигнала обнаружения предусмотрена на выходной стороне повышающего трансформатора 3 в линии передачи питания. Система ввода высокочастотного сигнала обнаружения состоит из источника 9 высокочастотного сигнала и цепи 7 связи. Высокочастотный сигнал обнаружения генерируется источником 9 высокочастотного сигнала в форме с фиксированной частотой, и высокочастотный сигнал, генерируемый источником 9 высокочастотного сигнала, передается непосредственно на линию питания двигателя с постоянными магнитами через цепь 7 связи. Поскольку устройство 4 для захвата высокочастотной сигнальной волны и повышающий трансформатор 3 установлены между точкой ввода высокочастотного сигнала обнаружения и инвертором 1, высокочастотный сигнал обнаружения не может поступать в инвертор 1 и сеть питания, что позволяет избежать ошибку обнаружения, вызванную инверторами 1 и электрической сетью.
Цепь связи передает высокочастотный сигнал обнаружения на линию питания двигателя с постоянными магнитами и предотвращает попадание низкочастотного сигнала в источник 9 высокочастотного сигнала. На фиг. 2 показана цепь связи. Три высокочастотных сигнала обнаружения поступают на линию питания через три трансформатора связи в цепи связи; а между тем, высокочастотная составляющая напряжения клеммы в линии питания также попадает в полосовой фильтр через вторичную и первичную обмотку трех трансформаторов связи в цепи связи. На фиг. 2 показано устройство для захвата высокочастотной сигнальной волны, состоящее из катушки индуктивности и конденсатора. На фиг. 4 показана цепь источника высокочастотного сигнала, которая может генерировать фиксированный высокочастотный сигнал с выходной частотой ƒ=1/[1,278(R2+RP)C1]. Можно увидеть, что частота высокочастотного сигнала зависит от значений резисторов R2, RP и конденсатора C1.
Взяв в качестве примера синусоидальный двигатель с постоянными магнитами, как показано на фиг. 2, источник 9 высокочастотного сигнала вводит три высокочастотных сигнала обнаружения с разными частотами в трехфазную линию питания двигателя с постоянными магнитами через цепь 7 связи. Поскольку обратная ЭДС частоты питания может быть отфильтрована посредством полосового фильтра 10, в соответствии с формулой расчета индуктивного сопротивления XL=2πƒL, индуктивное реактивное сопротивление является сильным, когда частота сигнала является высокой, а напряжение сопротивления обмотки может быть проигнорировано. Фиг. 5(а) представляет собой высокочастотную эквивалентную схему цепи двигателя с постоянными магнитами в полосе пропускания Δƒ1. Высокочастотный сигнал UABƒ1 обнаружения с частотой ƒ1 вводится между фазой A и фазой B; между тем, индуктивность обмоток фазы A и фазы B делит высокочастотную составляющую UABƒ1 напряжения, согласно значениям индуктивности, а поскольку фаза C не имеет высокочастотного сигнала обнаружения с частотой ƒ1, она рассматривается как короткое замыкание в высокочастотной эквивалентной схеме цепи двигателя с постоянными магнитами. Таким образом, напряжения на обеих клеммах фазы AC и фазы BC являются напряжениями клемм фазы A и фазы B. Соотношение между LA и LB может быть получено путем сравнения напряжений UACƒ1 и UBCƒ1. Подобным образом, как показано на фиг. 5(b), высокочастотный сигнал UBCƒ2 обнаружения с частотой ƒ2 вводится между фазой B и фазой C. Соотношение между LB и LC может быть получено путем сравнения напряжений UBAƒ2 и UCAƒ2. Как показано на фиг. 5(c), высокочастотный сигнал UCAƒ3 обнаружения с частотой ƒ3 вводится между фазой C и фазой A. Соотношение между LA и LC может быть получено путем сравнения напряжений UABƒ3 и UCBƒ3. Следовательно, соотношение между трехфазной индуктивностью может быть оценено в режиме реального времени. Согласно соотношению между трехфазными обмотками и положением ротора, показанным на фиг. 6, может быть получено абсолютное положение ротора, а контроллер 8 управляет двигателем для стабильной работы, согласно сигналу абсолютного положения ротора.
Настоящее изобретение может быть применено для определения положения ротора двигателя с постоянными магнитами в произвольном рабочем состоянии. Разница индуктивности каждой фазы двигателя с постоянными магнитами в разных положениях ротора не зависит от движения ротора двигателя, а также может быть получена разность индуктивности каждой фазы, когда ротор находится в неподвижном состоянии. Во время процесса пуска двигателя при нулевой скорости, сначала осуществляется запуск системы ввода высокочастотного сигнала обнаружения в процессе пуска, высокочастотный сигнал обнаружения вводится в линию питания двигателя с постоянными магнитами для получения соотношения между индуктивностью трехфазной обмотки. Согласно соотношению между индуктивностью каждой фазы обмотки и положением ротора, показанным на фиг. 6, определяют исходное положение ротора, а затем контроллер отправляет инструкцию приводного импульса для того, чтобы начать ускорение, и векторное управление или коммутационное управление двигателя с постоянными магнитами может быть выполнено в соответствии с положением ротора, полученным высокочастотным сигналом обнаружения в процессе ускорения.
Несмотря на то, что функции и рабочие процессы настоящего изобретения были описаны выше со ссылкой на прилагаемые чертежи, настоящее изобретение ими не ограничивается. Вышеуказанные конкретные реализации являются лишь иллюстративными, а не ограничивающими. Специалист в данной области техники может создать различные формы, в соответствии с раскрытием настоящего изобретения, не отступая от цели настоящего изобретения и объема охраны прилагаемой формулы изобретения, а в рамках охраны настоящего изобретения должны содержаться все формы.
Изобретение относится к области электротехники. Технический результат - расширение диапазона регулирования скорости двигателя и повышение точности определения положения. Способ управления без датчика положения для двигателя с постоянными магнитами с приведением в действие посредством длинного кабеля основан на добавлении цепи связи после повышающего трансформатора в цепи приведения в действие посредством длинного кабеля двигателя с постоянными магнитами. При осуществлении заявленного способа осуществляют передачу трех высокочастотных сигналов обнаружения с разными частотами в кабель питания и обмотки двигателя посредством трех трансформаторов связи в цепи связи соответственно, получение высокочастотных составляющих напряжения на первичных обмотках трансформаторов связи посредством полосовых фильтров, получение сигналов положения согласно соотношениям между эффективными значениями высокочастотных составляющих напряжения и, наконец, реализацию управления двигателем без датчика положения посредством контроллера в соответствии с полученными сигналами положения. 2 н. и 6 з.п. ф-лы, 6 ил.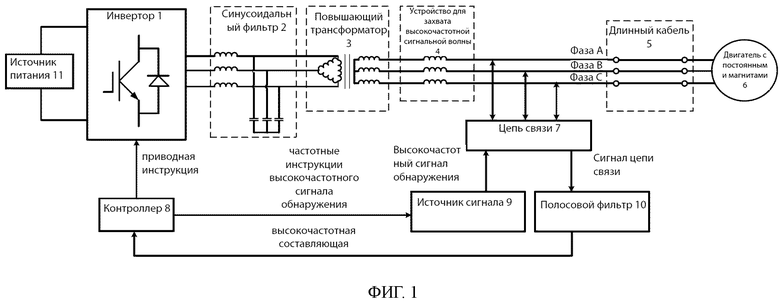
1. Устройство управления без датчика положения для двигателя с постоянными магнитами с приведением в действие посредством длинного кабеля, содержащее:
инвертор (1), синусоидальный фильтр (2), повышающий трансформатор (3), длинный кабель (5) и двигатель (6) с постоянными магнитами, которые соединены последовательно;
причем входная клемма сигнала инвертора (1) соединена с контроллером (8) для выдачи приводных инструкций, а входная клемма питания инвертора (1) соединена с источником (11) питания;
причем цепь (7) связи, выдающая высокочастотные сигналы обнаружения на двигатель (6) с постоянными магнитами и получающая высокочастотные составляющие напряжения трехфазных выходных клемм вторичной обмотки повышающего трансформатора (3), расположена между трехфазными выходными клеммами вторичной обмотки повышающего трансформатора (3) и трехфазными входными клеммами длинного кабеля (5);
входная клемма цепи (7) связи соединена с контроллером (8) посредством источника (9) сигнала для получения частотных инструкций высокочастотных сигналов обнаружения; и
выходная клемма цепи (7) связи соединена с контроллером (8) посредством полосового фильтра (10) для выдачи высокочастотных составляющих напряжения трехфазных выходных клемм вторичной обмотки повышающего трансформатора (3) контроллеру (8).
2. Устройство по п. 1, в котором каждая из трехфазных выходных клемм вторичной обмотки повышающего трансформатора (3) соответственно снабжена устройством (4) для захвата высокочастотной сигнальной волны для того, чтобы разность высокочастотных составляющих напряжения в каждой фазе не была подвержена воздействию со стороны электрической сети и инвертора.
3. Устройство по п. 2, в котором каждое устройство (4) для захвата высокочастотной сигнальной волны состоит из индуктора (L) и четвертого конденсатора (C4), соединенных параллельно, одна клемма устройства для захвата высокочастотной сигнальной волны соединена с однофазной выходной клеммой из трехфазных выходных клемм вторичной обмотки повышающего трансформатора (3), а другая клемма соединена с одной фазой входной клеммы длинного кабеля (5) и цепью (7) связи.
4. Устройство по п. 1, отличающееся тем, что цепь (7) связи содержит три комплекта цепей трансформатора связи, причем
первый комплект цепи трансформатора содержит первый трансформатор (T1), и одна клемма вторичной обмотки первого трансформатора (T1) соединена с фазой А трехфазного напряжения, а другая клемма соединена с фазой В трехфазного напряжения посредством первого конденсатора (С1);
второй комплект цепи трансформатора содержит второй трансформатор (T2), одна клемма вторичной обмотки второго трансформатора (T2) соединена с фазой C трехфазного напряжения, а другая клемма соединена с фазой A посредством второго конденсатора (С2);
третий комплект цепи трансформатора содержит третий трансформатор (T3), одна клемма вторичной обмотки третьего трансформатора (T3) соединена с фазой В, а другая клемма соединена с фазой С посредством третьего конденсатора (С3);
источник (9) сигнала содержит первый источник (91) сигнала, соединенный с первичной обмоткой первого трансформатора (Т1), второй источник (92) сигнала, соединенный с первичной обмоткой второго трансформатора (Т2), и третий источник (93) сигнала, соединенный с первичной обмоткой третьего трансформатора (T3);
полосовой фильтр (10) содержит первый полосовой фильтр (101) и второй полосовой фильтр (102), соответственно соединенные с первичной обмоткой первого трансформатора (T1), и третий полосовой фильтр (103) и четвертый полосовой фильтр (104), соответственно соединенные с первичной обмоткой второго трансформатора (T2), и пятый полосовой фильтр (105) и шестой полосовой фильтр (106), соответственно соединенные с первичной обмоткой третьего трансформатора (T3).
5. Устройство по п. 4, в котором первый полосовой фильтр (101) и шестой полосовой фильтр (106) имеют одинаковую полосу пропускания, обозначенную Δƒ2, и второй полосовой фильтр (102) и четвертый полосовой фильтр (104) имеют одинаковую полосу пропускания, обозначенную Δƒ3, и третий полосовой фильтр (103) и пятый полосовой фильтр (105) имеют одинаковую полосу пропускания, обозначенную Δƒ1, и Δƒ1, Δƒ2 и Δƒ3 не пересекаются друг с другом.
6. Способ управления без датчика положения для двигателя с постоянными магнитами с приведением в действие посредством длинного кабеля, выполняемый с помощью устройства управления по п.1, включающий в себя:
добавление цепи связи после повышающего трансформатора в цепи приведения в действие посредством длинного кабеля двигателя с постоянными магнитами;
передачу трех высокочастотных сигналов обнаружения с разными частотами в кабель питания и обмотки двигателя посредством трех трансформаторов связи в цепи связи соответственно;
получение высокочастотных составляющих напряжения на первичных обмотках трех трансформаторов связи посредством полосовых фильтров;
получение сигналов положения согласно соотношениям между эффективными значениями высокочастотных составляющих напряжения; и
наконец, реализацию управления двигателем без датчика положения посредством контроллера согласно полученным сигналам положения.
7. Способ управления без датчика положения по п. 6, в котором высокочастотный сигнал обнаружения генерируется независимым источником сигнала, и высокочастотный сигнал обнаружения и контур основного питания подвергаются мультиплексированию с разделением по частоте с кабелем и обмотками питания двигателя с постоянными магнитами.
8. Способ управления без датчика положения по п. 6, в котором устройство для захвата высокочастотной сигнальной волны обеспечивается между повышающим трансформатором и точкой ввода высокочастотного сигнала обнаружения для предотвращения попадания части высокочастотного сигнала в электрическую сеть и инвертор через повышающий трансформатор, за счет чего разница высокочастотных составляющих напряжения в каждой фазе не подвергается воздействию со стороны электрической сети и переключателя питания.
| CN 102780430 A, 14.11.2012 | |||
| CN 105827174 A, 03.08.2016 | |||
| US 9595896 B1, 14.03.2017 | |||
| ПАТРОН ДЛЯ ПНЕВМАТИЧЕСКОГО ОРУЖИЯ, СТРЕЛЯЮЩЕГО ПУЛЯМИ С КОНИЧЕСКОЙ ИЛИ СФЕРИЧЕСКОЙ ГОЛОВНОЙ ЧАСТЬЮ | 2004 |
|
RU2270974C1 |
| WO 2016057934 A1, 14.04.2016 | |||
| КОРРЕКЦИЯ СМЕЩЕНИЯ МАГНИТНОГО ПОТОКА ДЛЯ ВРАЩАЮЩЕЙСЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2011 |
|
RU2566499C2 |

