Область техники, к которой относится изобретение
Изобретение относится к области управления вращающимися электрическими машинами. В частности, изобретение относится к способу расчета магнитного потока во вращающейся электрической машине, способу управления инвертором, программному элементу, машиночитаемому носителю, контроллеру для инвертора и системе, содержащей вращающуюся электрическую машину.
Уровень техники
Как правило, невозможно непосредственно измерить магнитный поток и крутящий момент во вращающихся электрических машинах, значения которых могут быть необходимы для управления вращающимися электрическими машинами.
Например, в длинных каналах двигателя нефтяных платформ двигатель (являющийся электрической машиной) и инвертор разделяет большое расстояние, которое может достигать десятков километров. В таких случаях управление может быть основано на длительности импульса и скалярном режиме без обратной связи, где резистивное падение напряжения не может быть точно определено. Разомкнутая система управления объединяется с динамическим управлением крутящего момента (DTC) и принципами векторного управления, при этом могут применяться аналогичные измерение аппаратными средствами и диагностика.
Ошибки в падении напряжения на резистивное сопротивление могут повлиять на точность оцениваемого магнитного потока и оцениваемого крутящего момента. Также могут быть и другие источники ошибок, которые могут привести к ошибкам в оценке магнитного потока: измерение коэффициента усиления и ошибки смещения промежуточного напряжения постоянного тока и фазных токов, неточные оценки потерь на силовых переключателях инвертора или используемый алгоритм интегрирования.
Одним из известных решений коррекции ошибок может быть оценка резистивных потерь на линии и использование оценки в интегрированном контуре. Еще одним возможным решением может быть дополнительное измерение напряжения двигателя и его применение для расчета магнитного потока.
Дополнительный способ может быть основан на оценках минимального и максимального уровней магнитного потока за один период и добавлении полученного таким способом среднего значения к оценке магнитного потока, или на непосредственном применении коррекции к вектору напряжения. Тем не менее при таком способе имеется недостаток, который может не позволить выполнить хорошую корректировку при изменении частоты двигателя.
Решения для коррекции ошибок магнитного потока можно найти в документе US 20020041171 А1, описывающем наблюдение за магнитным потоком, в TW 441161 А, описывающем адаптацию параметров на линии и в JP 2006136053 А, в котором показан блок управления коррекцией смещения магнитного потока, корректирующий электрический ток с использованием вычисленных смещенных компонентов.
Описание изобретения
Целью изобретения является обеспечение способа лучшей коррекции ошибок в разомкнутой системе управления вращающейся электрической машиной.
Эта цель достигается при осуществлении объектов изображения по независимым пунктам формулы изобретения. Дальнейшие показательные варианты осуществления изобретения являются очевидными исходя из зависимых пунктов.
Один из объектов изобретения относится к способу расчета магнитного потока во вращающейся электрической машине. Вращающейся электрической машиной может быть электрический двигатель, как, например, индукционный двигатель, синхронный или двигатель с постоянными магнитами.
Согласно варианту осуществления изобретения, подача электрического тока к вращающейся электрической машине осуществляется посредством инвертора. Инвертор может модулировать ширину импульса цепи постоянного тока для питания вращающихся электрических машин, варьируя электрическую энергию. Инвертор может содержать контроллер для управления переключателем состояний инвертора и/или для управления частотой и крутящим моментом вращающихся электрических машин.
Согласно варианту осуществления изобретения, способ содержит этапы: определение вектора напряжения инвертора; определение вектора тока инвертора; расчет оцененного вектора магнитного потока на основе вектора напряжения инвертора и вектора тока инвертора; измерение коррекции и/или ошибок вычисления за счет изменения длины оцененного вектора магнитного потока, зависящего от сравнения оцененного магнитного потока (который может быть абсолютным значением или величиной оцененного вектора магнитного потока) и контрольного магнитного потока (который может быть величиной/длиной контрольного вектора магнитного потока). Контрольный магнитный поток может быть определен на основе относительной угловой частоты вращающейся электрической машины.
Таким образом, сдвиг магнитного потока оцененного вектора магнитного потока, вызванный ошибками измерений и/или вычислений может быть откорректирован путем сравнения оцененного вектора магнитного потока и контрольного вектора магнитного потока (или длины векторов), который уже был определен заранее для управления инвертора. В частности, в зависимости от сравнения их длин, длина оцененного вектора магнитного потока может быть увеличена или уменьшена.
В частности, коррекция смещения может быть применена, не зная полного периода оцененного вектора магнитного потока. Таким образом, так же когда частота вращающейся электрической машины меняется, с помощью способа можно генерировать хорошую коррекцию ошибок, в частности в случае, когда меняется только длина оцененного вектора магнитного потока. Изменение только длины оцененного вектора магнитного потока может означать, что меняется только величина, а не направление оцененного вектора магнитного потока.
Это может принести, по меньшей мере, следующие преимущества: оцененный вектор магнитного потока может быть стабилизирован с помощью управления. Может быть увеличена точность расчета частоты на основе оцененного вектора магнитного потока. Может быть увеличена точность определения электромагнитного крутящего момента. Могут быть улучшены электромагнитный крутящий момент и сигналы мощности для диагностики.
Согласно варианту осуществления изобретения, способ управления вращающихся электрических машин и способ коррекции смещения оцененного вектора магнитного потока в системе управления без обратной связи могут быть использованы для двигателей с очень длинными линиями подачи питания, которые дополнительно могут быть снабжены повышающими и понижающими трансформаторами. Способ может быть использован для управления инвертора напряжения, при скалярном (разомкнутая система управления без обратной связи) управлении магнитным потоком, и/или в электрическом двигателе, который запитывается с помощью длинных линий подачи питания, и который также имеет дополнительные повышающие и понижающие трансформаторы в системе привода.
В последнем случае способ для коррекции смещения магнитного потока и коррекции электромагнитного крутящего момента в скалярном режиме с широтно-импульсной модуляцией может улучшить магнитный поток, крутящий момент, оценивание потребляемой мощности при применении приводов с длинными линиями подачи питания двигателю с понижающими и повышающими трансформаторами.
Согласно варианту осуществления изобретения, способ дополнительно содержит: уменьшение длины оцененного вектора магнитного потока, если величина оцененного магнитного потока больше, чем величина контрольного магнитного потока, и/или удлинение оцененного вектора магнитного потока, если величина оцененного магнитного потока меньше, чем контрольное значение величины магнитного потока. Таким образом, всегда, когда применяется способ коррекции ошибок, оцененный вектор магнитного потока может быть смещен в направлении (неизвестном) действительного вектора магнитного потока. Не обязательно полностью корректировать ошибки за один этап расчета. Каждый раз при применении способа корректированный оцененный вектор магнитного потока несколько менее ошибочен, чем оцененный вектор магнитного потока без коррекции.
Например, увеличение и уменьшение длины оцененного вектора магнитного потока может быть выполнено путем: определения вектора смещения посредством умножения оцененного вектора магнитного потока на коэффициент, зависящий от соотношения между величиной контрольного магнитного потока и оцененной величины магнитного потока, изменения длины оцененного вектора магнитного потока за счет добавления вектора смещения к оцененному вектору магнитного потока. Таким образом, длина оцененного вектора магнитного потока изменяется без изменения направления оцененного вектора магнитного потока. Другими словами, коэффициент может быть действительным (а не комплексным числом).
Согласно варианту осуществления изобретения, определяется разница между оцененной величиной магнитного потока и величиной контрольного магнитного потока, и коэффициент зависит от соотношения разности и оцененной величины магнитного потока. Таким образом, коррекция может быть линейно зависимой от отклонения между оцененной величиной магнитного потока от контрольной величины магнитного потока.
Согласно варианту осуществления изобретения, коэффициент содержит фиксированное значение усиления, которое может находиться между 0,5 и 0,4, например 0,1 и 0,2. Эксперименты показали, что фиксированный коэффициент усиления этого значения приводит к хорошей сходимости ошибки коррекции.
Для экономии времени расчета можно не проводить коррекцию каждый раз при расчете оцененного вектора магнитного потока. Согласно варианту осуществления изобретения, оцененный вектор магнитного потока рассчитывается в первой дискретной временной области, а коррекция ошибок выполняется во второй дискретной временной области, один шаг второй дискретной временной области соответствует N шагам первой дискретной временной области.
Согласно варианту осуществления изобретения, вектор напряжения инвертора определяется на основе позиций переключения инвертора и напряжений на входах инвертора.
Согласно варианту осуществления изобретения, вектор тока инвертора определяется на основе токов на входах и/или выходах инвертора.
Согласно варианту осуществления изобретения, оцененный вектор магнитного потока является производным (например, в дискретной временной области) от предыдущего вектора магнитного потока, с добавлением вектора разницы и вектора потери напряжения. Вектор разницы может зависеть от контрольной угловой частоты, длины дискретного шага времени и вектора напряжения инвертора. Вектор потери напряжения может зависеть от контрольной угловой частоты, длины дискретного шага времени, заданного значения сопротивления и вектора тока инвертора.
Дополнительный аспект изобретения относится к способу управления инвертором. Согласно варианту осуществления изобретения, способ управления инвертором содержит: задание контрольной угловой частоты для вращающихся электрических машин, определение контрольного напряжения из угловой частоты, управление переключений инвертора, таких, как выходные напряжения инвертора с широтно-импульсной модуляцией, генерирование которых соответствует контрольному напряжению, определение оцененного вектора магнитного потока, как описано выше и далее; использование оцененного вектора магнитного потока для диагностики.
Дополнительный аспект изобретения относится к программному элементу (или компьютерной программе) для расчета магнитного потока во вращающихся электрических машинах, который выполняется процессором, адаптированным для выполнения этапов способа, как описано выше и далее. Например, контроллер инвертора может содержать процессор.
Дополнительный аспект изобретения относится к машиночитаемому носителю, в котором сохраняется программный элемент. Машиночитаемым носителем может быть дискета, жесткий диск, USB (Universal Serial Bus - универсальная последовательная шина) устройства хранения, ОЗУ (RAM - Random Access Memory - оперативное запоминающее устройство), ПЗУ (ROM - Read Only Memory - постоянное запоминающее устройство) и EPROM (Erasable Programmable Read Only Memory - стираемое программируемое постоянное ПЗУ). Машиночитаемым носителем может быть также сеть передачи данных, например Интернет, с возможностью загрузки программного кода.
Дополнительный аспект изобретения относится к контроллеру для инвертора, адаптированному для выполнения способа, как описано выше и далее.
Дополнительный аспект изобретения относится к системе. Согласно варианту осуществления изобретения, система содержит: инвертор с контроллером, адаптированным для выполнения способа, как описано выше и далее; кабель, подключенный к выходу инвертора; вращающаяся электрическая машина, расположенная в другом географическом местоположении относительно инвертора и снабженная кабелем; при этом датчики для определения входных параметров с целью определения оцененного магнитного потока расположены исключительно в инверторе. Входными параметрами могут быть позиции переключений инвертора, напряжения в звене постоянного тока и/или выходных токов инвертора. После инвертора может быть расположен повышающий трансформатор, соединенный с кабелем. Перед вращающейся электрической машиной может быть понижающий трансформатор, присоединенный к кабелю.
Должно быть понятно, что признаки способа, как описано выше и далее, могут быть признаками системы или контроллера, и наоборот.
Технически могут быть возможны, но явно не упоминаются, также комбинации вариантов осуществлений изобретения, описанных выше и далее, а также вариантов осуществления способа и системы.
Эти и другие аспекты изобретения будут очевидны из вариантов осуществления изобретения, описанных ниже, и будут разъяснены со ссылками на эти варианты.
Краткое описание чертежей
Ниже варианты осуществления настоящего изобретения описаны более подробно со ссылками на прилагаемые чертежи.
На Фиг.1 изображена система привода, в соответствии с вариантом осуществления изобретения.
На Фиг.2 изображены компоненты контроллера, в соответствии с вариантом осуществления изобретения.
На Фиг.3 изображены дополнительные компоненты контроллера, в соответствии с вариантом осуществления изобретения.
На Фиг.4 изображена схема, показывающая коррекцию ошибок, в соответствии с вариантом осуществления изобретения.
На Фиг.5а и 5b изображен пример того, как магнитный поток корректируется в соответствии с вариантом осуществления изобретения.
На Фиг.6а и 6b изображен пример того, как крутящий момент корректируется в соответствии с вариантом осуществления изобретения.
На Фиг.7а и 7b изображен пример того, как корректируется мощность в соответствии с вариантом осуществления изобретения.
В принципе, одинаковые части имеют одинаковые ссылочные обозначения на фигурах.
Подробное описание предпочтительных вариантов осуществления изобретения
Общий обзор
На фиг.1 представлена система 10 привода, содержащая инвертор-источник напряжения 12, подключенный к повышающему трансформатору 14, кабели 16 и понижающий трансформатор 18, присоединенный к вращающейся электрической машине в виде электродвигателя 20. Например, кабели могут быть длиннее десяти километров. Топология используемого инвертора может быть инвертором 12 с закрепленной нейтральной точкой (NPC), но также может быть использован другой инвертор-источник напряжения, соединенный с шиной 22 постоянного тока. Цепь постоянного тока может быть снабжена выпрямителем.
Для управления инвертором 12 система содержит контроллер 24.
На фиг.2 изображены компоненты или модули контроллера 24. Модули могут быть функциональными модулями контроллера и могут быть реализованы, соответственно, как запрограммированные программные модули или процедуры. Однако для специалистов в данной области техники очевидно, что функциональные модули могут быть реализованы полностью или частично на аппаратном уровне.
Контроллер 24 адаптирован для работы на принципе скалярного режима и для управления инвертором 12 таким образом, что ток генерируется с широтно-импульсной модуляцией на выходе инвертора 12. Одним входным параметром контроллера 24 является опорная частота ωREF, указывающая желаемую частоту вращения двигателя. Из опорной частоты ωREF модуль 26 опорного напряжения генерирует опорное напряжение US_REF с помощью заданной характеристики 28 напряжение/частота.
Опорное напряжение US_REF подается на вход модуля 30 широтно-импульсного модулятора. Модуль 30 генерирует импульс длиной 32 из опорного напряжения US_REF и переключает состояния Sa, Sb, Sc полупроводниковых переключателей инвертора, реализуя импульсы 32 в виде выходных токов инвертора 14.
Управление без обратной связи, модель напряжения и оценка магнитного потока
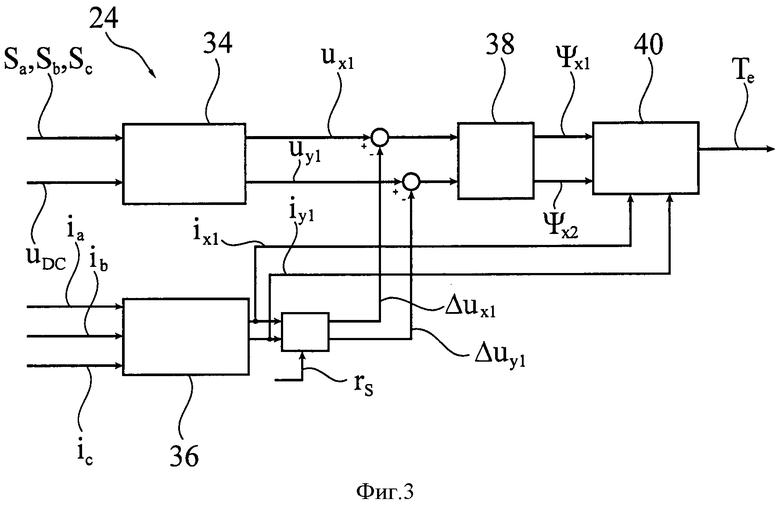
На фиг.3 изображены компоненты или модули контроллера 24 для расчета вектора Ψ магнитного потока статора и электромагнитного крутящего момента Te с моделью напряжения инвертора 12 и двигателя 20.
Для реализации модели напряжения модуль 34 вектора напряжения вычисляет комплексный вектор напряжения с компонентами Ux1 и Uy1 с помощью входных параметров Sa, Sb, Sc и UDC. Информация о позициях Sa, Sb, Sc переключений инвертора может приходить от модуля 30 широтно-импульсного модулятора, напряжение UDC линии постоянного тока может быть измерено с помощью датчика в линии 22 постоянного тока.
Кроме того, фазовые токи ia, ib, ic, например измеренные на выходе инвертора 12, преобразуются в комплексный вектор тока с компонентами ix1 и iy1 посредством 3/2 преобразования в модуле 36 вектора тока. Коррекция ΔUx1, ΔUy1 вектора напряжения рассчитывается из вектора ix1, iy1 тока с помощью расчетного сопротивления rs, и добавляется к вектору Ux1 и Uy1 напряжения. Расчетное сопротивление rs может быть основано на резистивных частях обмотки статора, повышающего трансформатора 14 и кабелей 18 между инвертором и двигателем 20.
Посредством интеграции результирующего вектора Ux1, Uy1 напряжения модуль 38 вектора магнитного потока рассчитывает оцененный вектор ΨS_EST магнитного потока с компонентами Ψх1 и Ψх2. С помощью оцененного вектора Ψх1, Ψх2 магнитного потока и вектора ix1, iy1 тока модуль 40 вектора крутящего момента рассчитывает оцененный крутящий момент Te двигателя 20.
Значения, вычисленные контроллером 24, содержат ошибки из-за падения напряжения на полупроводниках инвертора и пассивных компонентах, таких как фильтры, кабели, соединяющие клеммы двигателя и инвертора, ошибки измерений напряжения UDC постоянного тока и измерений фазных токов ia, ib, ic.
Далее управление без обратной связи двигателем 20, выполняемое с помощью контроллера 24 и соответствующих этапов вычислений, модель напряжения и оценка магнитного потока будут описаны более подробно.
Модель напряжения основывается на общем уравнении напряжения 

iS - ток статора, ΨS - вектор магнитного потока статора и ωk - угловая частота двигателя. В координатах статора ωk=0 и уравнение (1) напряжения становится следующим:
Вектор ΨS магнитного потока статора определяется посредством уравнения:

uS - напряжение статора, а основная гармоника iS тока статора может быть определена следующим образом:

В разомкнутом контуре регулирования, в скалярном режиме вектор ΨS магнитного потока статора вычисляется с помощью уравнения (3), в котором rS включает все резистивные потери на пути от выхода инвертора до клеммы двигателя.
Ошибки при оценке магнитного потока
Ошибка в интеграле (3) оказывает влияние на неверно оцененный (статорный) вектор ΨS_EST магнитного потока (который может быть вычислен аналогично ΨS в формуле (3)). За счет ошибок в оцененном векторе ΨS_EST магнитного потока вычисляется неточный крутящий момент Te, который является векторным произведением оцененного вектора ΨS_EST магнитного потока и вектора iS тока. Влияние ошибок при интеграции более заметно на низких частотах. На очень низких частотах может потребоваться дополнительная коррекция напряжения, вследствие высоких потерь напряжения из-за сопротивления rS. Частота ω, при которой может требоваться коррекция, может зависеть от применения и от падения напряжения.
Если воздействие ошибки при интеграции разомкнутого контура регулирования не скорректировано, то оцененный вектор ΨS_EST магнитного потока смещается от первоначального направления. В результате, вычисленный крутящий момент Te и оцененная мощность на валу (в зависимости от крутящего момента) может колебаться.
Ошибка интеграции изображена на фиг.4. Оцененный вектор ΨS_EST магнитного потока зацикливается с угловой частотой ω вокруг точки E, отличающейся от начала координат комплексной x-y-плоскости.
Ошибки, которые приводят к отклонению оцененного вектора ΨS_EST магнитного потока, происходят в двух случаях: во-первых, измеренное промежуточное напряжение может быть меньше реального напряжения постоянного тока, во-вторых, может возникнуть ошибка смещения в измеренных фазовых токах, которая приводит к компоненту постоянного тока в фазовых токах и, наконец, приводит к нестабильной интеграции. Эти факты могут быть выведены из следующих уравнений.
Уравнение (3) магнитного потока может быть записано в форме:

Ошибка вектора магнитного потока статора может быть выражена как разница между вектором магнитного потока статора и оцененным вектором магнитного потока (уравнение 7):

rS_EST - оцененное сопротивление, rS - заранее установленное оцененное сопротивление и ΔrS - ошибка при оценке.
Вектор ошибки магнитного потока статора описывается следующим образом:

Вместе с уравнением (5) это дает:

и

С уравнением (4) вектор ошибки магнитного потока становится:

В уравнении (10) можно обратить внимание, что вектор ΔΨS ошибки магнитного потока статора пропорционален ошибке в сопротивлении ΔrS статора и обратно пропорционален угловой частоте ω.
Если смещается вектор тока, то оценка магнитного потока статора сдвигается от начала координат на величину, увеличенную на ΔrS.
Оцениваемый крутящий момент TEL может быть рассчитан векторным умножением вектора ΨS магнитного потока статора и тока iS статора. Ошибка магнитного потока непосредственно влияет на ошибку крутящего момента.


Ошибка крутящего момента пропорциональна ошибке сопротивления ΔrS статора и обратно пропорциональна угловой скорости ω.
Следовательно, ошибки вектора магнитного потока статора и ошибки электромагнитного крутящего момента малы на более высокой скорости, но очень велики, если угловая скорость ω близка к нулю.
Коррекция ошибок оценки магнитного потока
Далее содержится пояснение алгоритма коррекции смещения магнитного потока в системах с разомкнутым контуром регулирования, которая может быть выполнена посредством модуля 38 вектора магнитного потока:
Как правило, в скалярном режиме разомкнутого контура регулирования вектор магнитного потока оценивается с помощью уравнения (3) интегрирования. Смещение магнитного потока статора от точки начала координат приводит к колебанию оцененного крутящего момента, сопровождаемые хорошо рассчитываемыми колебаниями мощности.
С помощью алгоритма коррекции оцененный вектор ΨS_EST магнитного потока статора рассчитывается в дискретной временной области. Сначала на вычислительном временном уровне или временном этапе Tsl предварительное значение вектора ΨS_EST_PRELIMINARY магнитного потока статора определяется согласно уравнению (13):

ΨS_EST_PRELIMINARY[k] - предварительное значение вектора магнитного потока статора на k-м цикле вычисления, которое основано на последней действительной оценке магнитного потока статора ΨS_EST[k]. Далее, uINV - вектор напряжения инвертора, который рассчитывается с помощью измерения промежуточного напряжения UDC и позиций переключения. Компоненты ux1 и uy1 от uINV могут быть рассчитаны посредством модулей 34 и 36 (см. выше).
Интеграл потерь напряжения за счет сопротивления и тока статора рассчитывается согласно (14):

Оцененное значение вектора ΨS_EST магнитного потока статора на k-м цикле вычисления корректируются посредством (14),

Поскольку оцененный вектор ΨS_EST рассчитывается из интеграции напряжения, в открытом алгоритме интеграции магнитного потока могут возникать ошибки, которые могут быть видны в виде сдвига от первоначального местоположения начала координат на комплексной плоскости (см. фиг.4). Сдвиг оцененного вектора магнитного потока влияет на колебания в рассчитанных крутящем моменте и мощности. Действительные сигналы используются для целей управления и диагностики, для чего необходима определенная точность. Последующий алгоритм для коррекции сдвига оцененного вектора магнитного потока корректирует вектор смещения магнитного потока и улучшает точность оценки крутящего момента и мощности.
Вектор ΨOFFSET смещения магнитного потока статора определяется с помощью (16)

ΨS_REF - контрольная величина магнитного потока статора, a |ΨS_EST| - амплитуда или величина, или длина оцененного вектора магнитного потока статора. Контрольная величина ΨS_REF магнитного потока статора может быть получена из контрольной частоты ωREF, которая используется для расчета uS_REF (см фиг.2 и соответствующее описание).
Корректированный вектор ΨOFF_COMPENSATE смещения магнитного потока определяется с помощью (17):

Pgain - значение усиления для вектора сдвига магнитного потока и может иметь значение между 0.1 и 0.2.
Выражение в скобках в формуле (16) - первый действительный коэффициент. Pgain в формуле (17) - второй действительный коэффициент. В сумме, (корректированный) вектор сдвига магнитного потока рассчитывается с помощью умножения оцененного вектора магнитного потока и действительного коэффициента, являющегося произведением первого и второго действительных коэффициентов.
Для коррекции ошибок, вектор (17) смещения корректированного магнитного потока добавляется к интегральному уравнению (18) резистивных потерь напряжения:

Из уравнений с (16) по (18) можно вывести, что оцененный вектор ΨS_EST магнитного потока укорачивается, если величина ΨS_EST оцененного магнитного потока больше, чем контрольная величина ΨS_REF магнитного потока, и оцененный вектор ΨS_EST магнитного потока укорачивается, если величина оцененного вектора ΨS_EST магнитного потока меньше, чем контрольная величина ΨS_REF магнитного потока.
Это показано на фиг.4. Контрольный вектор магнитного потока может иметь такую же или схожую величину ΨS_REF, как и действительный магнитный поток статора ΨS_real. В том случае, если оцененный вектор ΨS_EST1 магнитного потока меньше, чем действительный вектор магнитного потока ΨS_real, то вектор магнитного потока удлиняется за счет вектора смещения ΨOFF1. В том случае, если оцененный вектор ΨS_EST2 магнитного потока больше, чем действительный вектор ΨS_real магнитного потока, то вектор ΨS_EST2 удлиняется за счет вектора смещения ΨOFF2. В любом случае, после коррекции оцененный вектор магнитного потока оказывается ближе к действительному магнитному потоку и, следовательно, оказывается менее ошибочным относительно действительного вектора магнитного потока. Цель коррекции заключается в коррекции смещения, а не в адаптации амплитуды магнитного потока.
После коррекции вектор смещения магнитного потока может быть использован для коррекции ошибки крутящего момента:

Электромагнитный крутящий момент (19) и угловая скорость определяют оцениваемую мощность.
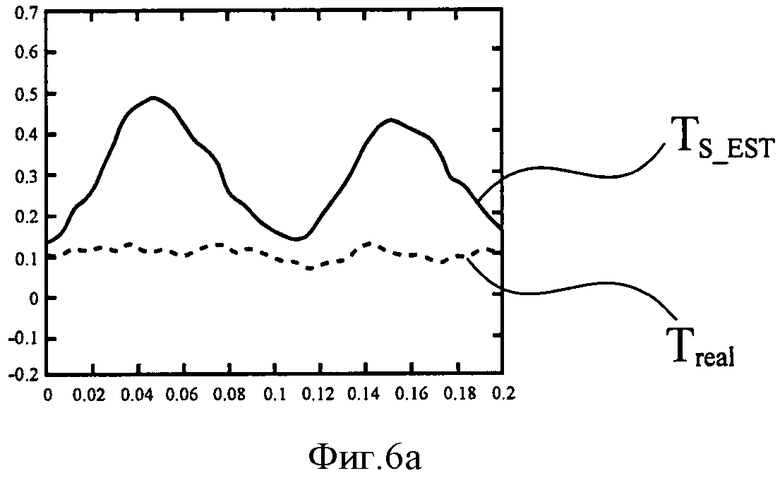
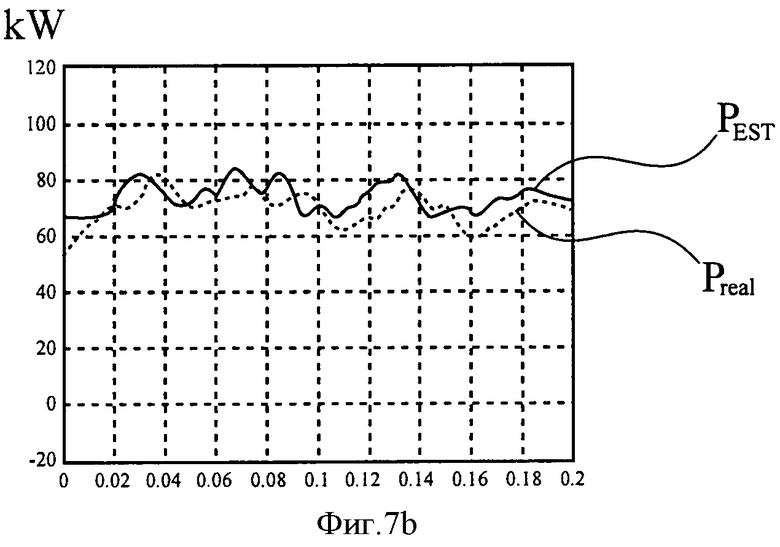
Последующие фигуры 5a, 5b, 6a, 6b, 7a и 7b показывают моделированные и расчетные данные магнитного потока Ψ, крутящий момент T и мощность P, при этом на фиг.5a, 6a и 7a коррекция магнитного потока, согласно настоящему изобретению, отсутствует, а на фиг.5b, 6b и 7b магнитный поток корректируется согласно алгоритму, как описано выше.
Данные моделируются при устойчивом состоянии работы двигателя 20 на малой скорости (0.05 от максимальной скорости) и с нагрузкой, составляющей 10%.
На фиг.5a и 5b изображен действительный магнитный поток ΨS_real и оцененный вектор ΨS_EST магнитного потока на комплексной плоскости. Как может быть видно на фиг.5a и 5b, смещение вектора ΨS_EST из точки начала координат на фиг.5a корректируется с помощью алгоритма.
На фиг.6a и 6b изображен действительный крутящий момент Treal и оцениваемый крутящий момент ΨS_EST. Как может быть видно на фиг.6a и 6b, большинство вариаций оцениваемого момента ΨS_EST на фиг.6a корректируется по алгоритму на фиг.6b.
На фиг.7a и 7b изображена действительная мощность Preal на валу и оцениваемая мощность PEST на валу. Как может быть видно на фиг.7a и 7b, большинство вариаций оцениваемого крутящего момента PEST на фиг.7a корректируются по алгоритму на фиг.7b.
Изобретение было проиллюстрировано и подробно описано в чертежах и предшествующем описании. Такая иллюстрация и описание должны рассматриваться как иллюстративные или показательные, но не как ограничивающие, при этом изобретение не ограничивается раскрытыми вариантами осуществления. Специалистам в данной области техники могут быть понятными и осуществимыми другие изменения раскрытых вариантов осуществления изобретения, а также применение на практике заявленного изобретения после изучения чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения слово «содержит» не исключает других элементов или этапов, а неопределенный артикль «a» или «an» не исключает множественности. Один процессор или контроллер, или другой элемент может выполнять функции нескольких отдельных пунктов, изложенных в формуле изобретения. Тот факт, что определенные мероприятия приведены в различных взаимозависимых пунктах, не означает, что комбинация этих мероприятий не может быть использована для получения преимущества. Любые цифровые ссылки в формуле изобретения не должны истолковываться как ограничивающие объем изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОРОМ | 2011 |
|
RU2578165C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СИНХРОННОЙ МАШИНОЙ С ПОСТОЯННЫМИ МАГНИТАМИ | 2010 |
|
RU2561879C2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ МОТОРА И МАШИНА ДЛЯ СТИРКИ БЕЛЬЯ, ВКЛЮЧАЮЩАЯ В СЕБЯ ЕГО | 2014 |
|
RU2596104C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2576246C1 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| КОНТРОЛЛЕР ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2432663C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В ЭЛЕКТРОННО-ВЫЧИСЛИТЕЛЬНУЮ МАШИНУ (ЭВМ) | 2000 |
|
RU2173882C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ВРАЩАЮЩЕЙСЯ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2015 |
|
RU2664782C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ВРАЩАЮЩЕЙСЯ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2491692C2 |






Изобретение относится к области электротехники и может быть использовано во вращающихся электрических машинах. Технический результат - повышение точности коррекции ошибки смещения магнитного потока в разомкнутой системе управления вращающейся электрической машине. В способе коррекции смещения магнитного потока, вызванного ошибками измерений и/или расчетов при управлении вращающейся электрической машины (20), смещение магнитного потока для оцененного вектора магнитного потока корректируют посредством сравнения длины вектора магнитного потока с контрольной величиной магнитного потока, которая заранее определена для управления инвертором. В зависимости от результатов сравнения длина оцененного вектора магнитного потока будет увеличена или уменьшена. 4 н. и 8 з.п. ф-лы, 10 ил.
1. Способ определения магнитного потока во вращающейся электрической машине (20), на которую подается электричество от инвертора (12), содержащий этапы:
определение вектора (ux1, uy1) напряжения инвертора;
определение вектора (ix1, iy1) тока инвертора;
расчет оцененного вектора (ΨS_EST) магнитного потока на основе вектора напряжения инвертора и вектора тока инвертора;
коррекция ошибок посредством изменения длины оцененного вектора (ΨS_EST) магнитного потока в соответствии с результатом сравнения длины оцененного вектора (ΨS_EST) магнитного потока и контрольной величины (ΨS_REF) магнитного потока.
2. Способ по п. 1, дополнительно содержащий:
определение вектора (ΨOFFSET) смещения путем умножения оцененного вектора (ΨS_EST) магнитного потока на коэффициент, причем коэффициент зависит от соотношения между контрольной величиной (ΨS_REF) магнитного потока и длиной оцененного вектора (ΨS_EST) магнитного потока;
изменение длины оцененного вектора (ΨS_EST) магнитного потока посредством добавления вектора (ΨOFFSET) смещения к оцененному вектору (ΨS_EST) магнитного потока.
3. Способ по п. 2, в котором коэффициент зависит от соотношения между разностью между длиной оцененного вектора магнитного потока и контрольной величиной магнитного потока (ΨS_EST-ΨS_REF) и длиной оцененного вектора (ΨS_EST) магнитного потока.
4. Способ по п. 2, в котором коэффициент содержит фиксированное значение (Pgain) усиления.
5. Способ по п. 4, в котором фиксированное значение усиления составляет 0,1-0,2.
6. Способ по любому из пп. 1-5, в котором вектор (ux1, uy1) напряжения инвертора определяют на основе позиций (Sa, Sb, Sc) переключения инвертора и/или напряжений (uDC) на входах инвертора.
7. Способ по любому из пп. 1-5, в котором вектор (ix1, iy1) тока инвертора определяют на основе токов (ia, ib, ic) на входах и/или выходах инвертора.
8. Способ по любому из пп. 1-5,
в котором оцененный вектор (ΨS_EST) магнитного потока выводят из предыдущего вектора магнитного потока посредством добавления вектора разности и вектора потери напряжения;
при этом вектор разности зависит от контрольной угловой частоты, длины временного шага дискретизации и вектора (ux1, uy1) напряжения инвертора;
а вектор потери напряжения зависит от контрольной угловой частоты, длины временного шага дискретизации, заранее определенного значения сопротивления и вектора (ix1, iy1) тока инвертора.
9. Способ управления инвертором (12), включающий:
задание контрольной угловой частоты (ωREF) для вращающейся электрической машины (20);
определение контрольного напряжения (uS_REF), исходя из угловой частоты;
управление электронными переключателями инвертора (12) таким образом, что генерируются модулированные выходные напряжения (32) инвертора (12), которые соответствуют контрольному напряжению;
определение оцененного вектора (ΨS_EST) магнитного потока по любому из пп. 1-8;
использование оцененного вектора (ΨS_EST) магнитного потока для диагностики.
10. Контроллер (24) для инвертора (12), выполненный с возможностью осуществления способа по любому из пп. 1-9.
11. Система (10), содержащая:
инвертор (12) с контроллером (24) по п. 10;
кабель (16), соединенный с выходом инвертора (12);
вращающуюся электрическую машину (20), расположенную в другом географическом местоположении относительно инвертора (12) и снабжаемую энергией через кабель (16); и
расположенные на инверторе (12) датчики для определения входных параметров, с тем чтобы определить оцененный вектор (ΨS_EST) магнитного потока.
12. Система (10) по п. 11, дополнительно содержащая:
повышающий трансформатор (14) и понижающий трансформатор (18), присоединенные к кабелю (16).
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ СИСТЕМА | 2008 |
|
RU2375804C2 |
| КВАС | 1999 |
|
RU2155800C1 |
| DE 10020136 A1, 23.10.2001 | |||
| US 2002041171 A1, 11.04.2002 | |||
| US 6703809 B2, 09.03.2004 | |||
| CN 101582675 A, 18.11.2009 | |||
| Режекторный фильтр | 1986 |
|
SU1385259A1 |
| Устройство для подачи заготовок в зону обработки | 1972 |
|
SU441161A1 |

