Изобретение относится к области прикладного телевидения, использующего алгоритмы селекции изображения объекта на неоднородном фоне, в частности, с целью последующего определения его координат и автосопровождения.
Известен способ селекции изображения объекта, описанный в литературе У. Прэтт, Цифровая обработка изображений. Пер. с англ. М. Мир, Кн. 2. 1982 г. С. 555-560. Способ заключается в определении значения средней яркости изображения и установления глобального порога, соответствующего этому значению, при сравнении с которым формируется бинарный сигнал объекта. Способ имеет недостаточную точность при наличии неравномерности фона.
Известен другой способ, описанный там же, который заключается в определении гистограммы яркости изображения, нахождении минимального ее значения и установления глобального порога, соответствующего этому значению, при сравнении с которым формируется бинарный сигнал объекта. Способ имеет также недостаточную точность при наличии неравномерности фона.
Известен также способ, описанный там же, который заключается в разбиении изображения на фрагменты и установлении локальных порогов для каждого фрагмента по средней яркости фрагмента либо по минимуму гистограммы яркости. Данный способ также имеет недостаточную точность, поскольку не исключает селекцию неоднородностей фона при селекции изображения объекта.
Известен способ, описанный в статье Морозов А.В. Адаптивная бинаризация изображений звездного неба. Вопросы радиоэлектроники серия Техника телевидения, вып.1, 2017 г. С. 25-27. Способ заключается в определении среднего значения яркости В изображения, дифференцировании сигнала изображения и определения по нему среднеквадратического отклонения σ и формировании порога Р, равного взвешенной сумме: Р=αВ+βσ, где α и β константы, при сравнении с которым формируется бинарный сигнал объекта. Данный способ позволяет повысить вероятность правильного обнаружения сигнала малоразмерного объекта, однако, данный не обладает достаточной точностью при наличии неоднородного фона.
Наиболее близким техническим решением к предлагаемому изобретению, является принятый за прототип способ, описанный в статье А.Л. Андреев, В.В. Коротаев, A.M. Пашковский, «Селекция изображений малоразмерных объектов на неоднородном фоне в условиях помех», Изв. Вузов. Приборостроение. 2013 г., т. 56, №10, с. 88-93.
Данный способ основан на дифференциации размеров объекта и неоднородностей фона и заключается в следующем.
Текущий сигнал изображения с выхода телевизионного датчика преобразуется в цифровую форму. Далее этот сигнал сглаживают в пределах апертуры сглаживающего фильтра, размер m которой должен быть больше размеров Мo изображения объекта, но много меньше размеров изображений неоднородностей фона Мф, т.е.:

В результате сглаживания сигнал от объекта подавляется, а сигнал от неоднородностей фона сохраняется и используется для компенсации фоновой составляющей. Компенсация производится путем вычитания сглаженного сигнала из исходного текущего сигнала. Полученный разностный сигнал сравнивают с порогом, например, на уровне 0,5 от максимального значения разностного сигнала, формируя тем самым выходной бинарный сигнал объекта.
Недостатком данного способа является низкая точность селекции изображения объекта при его сближении с точкой видеонаблюдения. В результате такого сближения размер изображения объекта начинает постепенно увеличиваться. Это приводит к несоблюдению выражений (1), и, соответственно, к прекращению подавления сигнала объекта при сглаживании. В результате сигнал объекта и компенсируется вместе с фоном при последующем вычитании. На практике размер сглаживающей апертуры m обычно не превышает 8-10 элементов. Отметим также, что при несоблюдении условий (1) вычитание сглаженного сигнала из текущего приводит к формированию контуров объекта (так называемое, «нерезкое маскирование»). Несмотря на то, наличие контуров объекта является достаточным для определения, в частности, координат его центра, амплитуда контуров объекта, формируемых при «нерезком маскировании», оказывается меньше амплитуды сигнала объекта, формируемого при соблюдении условия (1). Таким образом, снижение отношения сигнал-шум также приводит к уменьшению точности селекции изображения объекта.
Задачей предлагаемого технического решения является повышение точности селекции изображения объекта на неоднородном фоне в условиях сближения объекта с точкой видеонаблюдения.
Технический результат заявляемого технического решения выражен в повышении точности селекции изображения объекта за счет повышения отношения сигнал-шум при соответствующем увеличении размеров изображения объекта.
Технический результат достигается тем, что в отличие от известного способа селекции изображения объекта на неоднородном фоне, заключающемся в формировании компенсирующего сигнала путем сглаживания текущего цифрового сигнала в апертуре с размером m>Мo, но m<<Мф, где Мo и Мф - размеры изображения объекта и фона, соответственно, формировании разностного сигнала путем вычитания компенсирующего сигнала из текущего и формировании выходного бинарного сигнала объекта путем сравнения разностного сигнала с фиксированным порогом, согласно изобретению в каждом i-том кадре видеопоследовательности производят оценку размера бинарного изображения объекта Moi и при изменении этого размера в пределах l<Moi≤m осуществляют предварительное сглаживание текущего сигнала с апертурой mi=Мoi, соответствующей полученной оценке, а при достижении условия mi=m размер апертуры фиксируют.
Для достижения указанного выше технического результата предложен способ селекции изображения объекта на неоднородном фоне, включающий формирование компенсирующего сигнала путем сглаживания текущего цифрового сигнала в апертуре с размером m>Мo, но m<<Мф, где Мo и Мф - размеры изображения объекта и фона, соответственно, формирование разностного сигнала путем вычитания компенсирующего сигнала из текущего и формирование выходного бинарного сигнала объекта путем сравнения разностного сигнала с фиксированным порогом, причем, в каждом i-том кадре видеопоследовательности производят оценку размера бинарного изображения объекта Мoi, при 1<Мoi≤m осуществляют предварительное сглаживание текущего сигнала с апертурой mi=Moi, а при достижении условия mi=m размер апертуры фиксируют.
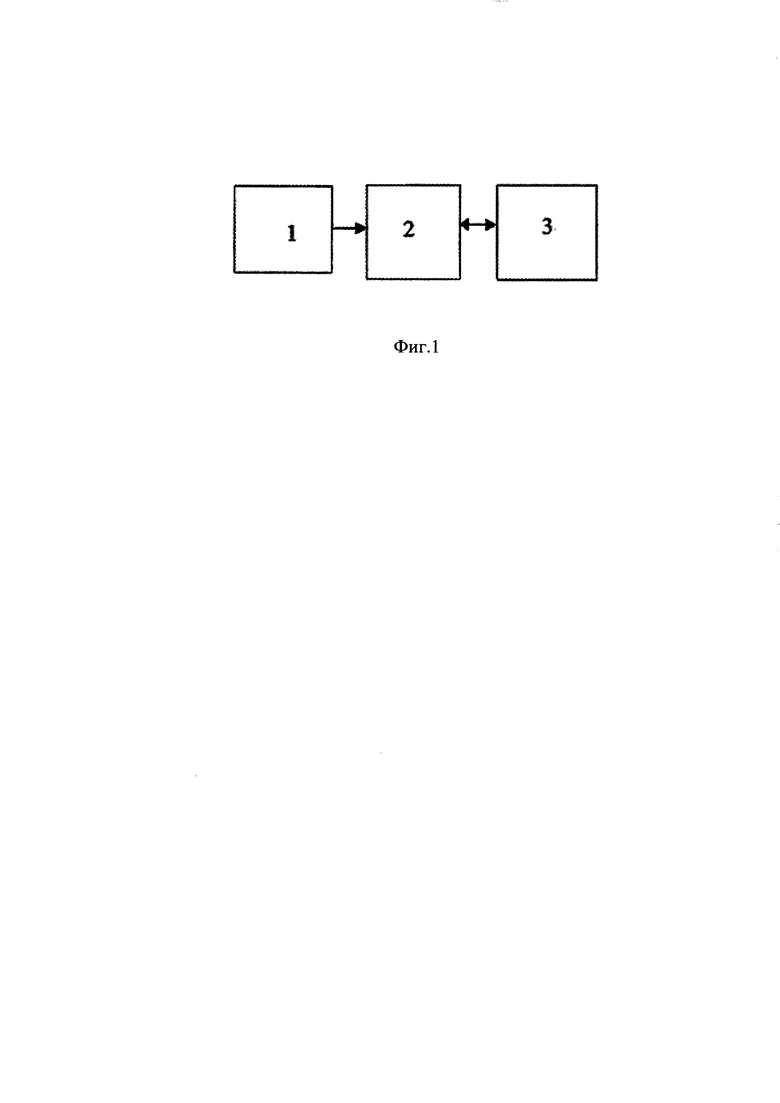
В качестве примера на фиг. 1 показана спектрозональная телевизионная система, реализующая предлагаемый способ, где:
1 - телевизионная камера;
2 - устройство видеозаписи;
3 - компьютер.
Телевизионная камера 1, устройство 2 видеозаписи и компьютер 3 соединены последовательно.
Способ осуществляется следующим образом. Телевизионная камера 1 преобразует в электрический сигнал изображение малоразмерного объекта, находящегося на неоднородном фоне. Электрический сигнал преобразуется в цифровую форму стандартным устройством 2 видеозаписи и вводится в компьютер 3 в виде последовательности кадров. Введенные в компьютер кадры изображений последовательно обрабатываются программным путем.
При этом текущий цифровой сигнал сглаживается в апертуре с размером m>Мo, но m<<Мф, где Мo и Мф - размеры изображения объекта и фона, соответственно. Затем производится формирование разностного сигнала путем вычитания компенсирующего сигнала из текущего и формирование выходного бинарного сигнала объекта путем сравнения разностного сигнала с фиксированным порогом. Дополнительно в каждом i-том кадре видеопоследовательности производят оценку размера бинарного изображения объекта Moi, причем, при 1<Moi≤m осуществляют предварительное сглаживание текущего сигнала с апертурой mi=Moi, а при достижении условия mi=m размер данной апертуры фиксируют.
Следует отметить, что в процессе предварительного сглаживания при увеличении размера изображения объекта и, соответственно, при увеличении апертуры mi=Moi в пределах 1<mi≤m происходит увеличение отношения сигнал-шум до в  раз, что положительно сказывается на результате селекции объекта. Так, например, при размере апертуры m=9 дальнейшее формирование сигнала объекта после достижения размера апертуры mi=m будет производиться при отношении сигнал-шум в три раза выше исходного.
раз, что положительно сказывается на результате селекции объекта. Так, например, при размере апертуры m=9 дальнейшее формирование сигнала объекта после достижения размера апертуры mi=m будет производиться при отношении сигнал-шум в три раза выше исходного.
Происходящее при этом уменьшение разрешающей способности не оказывает влияния на результат селекции изображения объекта в силу соответствующего увеличения его размера при сближении объекта с точкой видеонаблюдения. Происходящее при этом сглаживание фронтов сигнала объекта также не оказывает влияния на результат его селекции и определения координат, поскольку центр объекта будет соответствовать максимуму сигнала его изображения.
Сигнал изображения объекта может быть получен путем последовательной съемки стандартной телевизионной камерой с фиксацией в компьютере через стандартное устройство видеозаписи типа AverEZCapture фирмы AverMedia, подключаемое PCI- шине компьютера. Выходное изображение селектируемого объекта может быть получено путем программирования в среде стандартного пакета MATLAB или путем создания специализированной программы в среде С++.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2419150C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2003 |
|
RU2250478C2 |
| СПОСОБ СРАВНЕНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2673396C1 |
| СПОСОБ СЕЛЕКЦИИ ФРАГМЕНТА ИЗОБРАЖЕНИЯ ДЛЯ ТЕЛЕВИЗИОННЫХ КООРДИНАТОРОВ | 2006 |
|
RU2319316C1 |
| Способ определения скорости по видео | 2017 |
|
RU2695708C2 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИИ ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ НА ОСНОВЕ КОМПЛЕКСИРОВАНИЯ БАЗОВЫХ АЛГОРИТМОВ | 2014 |
|
RU2575401C1 |
| СПОСОБ ПОИСКА И РАСПОЗНАВАНИЯ ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2011 |
|
RU2458397C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ СЛАБОИЗЛУЧАЮЩИХ ПОДВИЖНЫХ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ НА ПРОСТРАНСТВЕННО-НЕОДНОРОДНОМ ФОНЕ ОПТИКО-ЭЛЕКТРОННЫМИ ПРИБОРАМИ | 2013 |
|
RU2536082C1 |
| Способ преобразования изображения дыма и пламени | 2019 |
|
RU2707416C1 |
| Способ помехоустойчивого обнаружения дыма и пламени в сложной фоно-световой обстановке | 2021 |
|
RU2760921C1 |
Изобретение относится к области прикладного телевидения, использующего алгоритмы селекции изображения объекта на неоднородном фоне, в частности, с целью последующего определения его координат и автосопровождения. Технический результат заключается в повышении точности селекции изображения объекта за счет повышения отношения сигнал-шум при соответствующем увеличении размеров изображения объекта. Результат достигается тем, что формируют компенсирующий сигнал путем сглаживания текущего цифрового сигнала в апертуре с размером m>Мo, но m<<Мф, где Мo и Мф - размеры изображения объекта и фона, соответственно, формируют разностный сигнал путем вычитания компенсирующего сигнала из текущего и формирования выходного бинарного сигнала объекта путем сравнения разностного сигнала с фиксированным порогом, причем в каждом i-м кадре видеопоследовательности производят оценку размера бинарного изображения объекта Moi, при 1<Moi≤m осуществляют предварительное сглаживание текущего сигнала с апертурой mi=Moi, а при достижении условия mi=m размер апертуры фиксируют. 1 ил.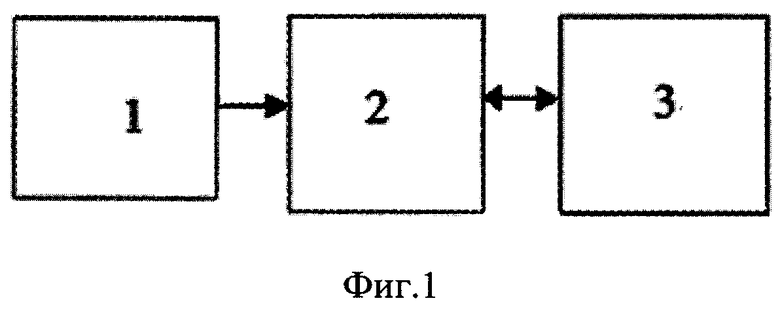
Способ селекции изображения объекта на неоднородном фоне, включающий формирование компенсирующего сигнала путем сглаживания текущего цифрового сигнала в апертуре с размером m>Мo, но m<<Мф, где Мo и Мф - размеры изображения объекта и фона, соответственно, формирование разностного сигнала путем вычитания компенсирующего сигнала из текущего и формирование выходного бинарного сигнала объекта путем сравнения разностного сигнала с фиксированным порогом, отличающийся тем, что в каждом i-том кадре видеопоследовательности производят оценку размера бинарного изображения объекта Moi, при 1<Moi≤m осуществляют предварительное сглаживание текущего сигнала с апертурой mi=Moi, а при достижении условия wi=m размер апертуры фиксируют.
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА | 1984 |
|
RU2081436C1 |
| US 6118886 A, 2000.09.12 | |||
| US 4603430 A, 1986.07.29 | |||
| EP 0346985 A2, 1989.12.20 | |||
| US 7317829 B2, 2008.01.08 | |||
| Устройство для последовательной гибки заготовок в обод | 1978 |
|
SU774730A1 |
| US 7006128 B2, 2006.02.28. | |||

