Изобретение относится к области ракетно-космической техники, и может быть использовано при создании двигательных установок (ДУ) для управляемых космических аппаратов (КА).
Известно, что для управления КА в полете применяются различные ДУ, обеспечивающие ориентацию и удержание КА на траектории полета, а также изменение положения КА.
Последнее 10-летие освоения космического пространства характеризуется активизацией стран и частных компаний - участников различных проектов по созданию КА с применением различного класса ДУ, использующих в качестве источника энергии химическое топливо (жидкое, твердое, гелеобразное и газообразное), электрических, плазменных, ионных и др. (см. обзор ФГУП "НТЦ оборонного комплекса "Компас", М., 2018 г.) Известно использование для управления КА двигательной установки в виде газореактивной системы ориентации (ГРСО), установленной на Ракете космического назначения (см. патент 2025645 от 30.12.1992 - прототип). В рассматриваемом патенте ГРСО располагается на сопловом блоке третьей маршевой ступени и содержит (см. фиг. 3) газогенераторы (28), распределители (29), сопловые блоки (30) и коллекторы (31). При этом, газогенераторы могут быть выполнены твердотопливными, на сжиженном или сжатом газе. Количество газогенераторов определяется как условием компоновки, так и потребным запасом рабочего тела.
Недостатком способа управления ГРСО, принятого за прототип, является то, что при задействовании газогенераторов по очереди в системе возникают колебания потока продуктов сгорания, что отрицательно сказывается на работоспособности регулирующих и управляющих устройств.
Стоить отметить, что изготовление ГРСО, принятого за прототип, осуществляется поэлементным монтажом составных частей ГРСО на сопловом блоке, что снижает эксплуатационные характеристики и усложняет монтаж и проведение приемо-сдаточных испытаний.
Кроме того, недостатками ДУ на жидком или газообразном (на сжиженном или сжатом газе) топливе по сравнению с ТДУ, являются малые гарантийные сроки сохранности, пониженная надежность и эксплуатационные характеристики.
Задачей предполагаемого изобретения является создание способа управления и конструкции ТДУ, которые позволят сглаживать динамические колебания и более рационально использовать запас рабочего тела за счет предварительного накопления и стабилизации давления газа в ресивере-накопителе, а также повысят точность, надежность и эксплуатационные характеристики ТДУ.
Это достигается за счет того, что в известном способе управления ТДУ, заключающемся в изменении импульса и вектора тяги ТДУ с помощью комбинации сопловых электромагнитных блоков управления (ЭМБУ), открывающих и закрывающих выходное сечение по командам от системы управления (СУ), через которые истекает газ под давлением, создаваемый источниками рабочего тела и проходящий через коллектор, в котором производится телеметрический контроль давления с помощью датчика, на выходе из последовательно задействуемых источников рабочего тела происходит накопление и стабилизация давления газа в ресивере-накопителе, после чего производится понижение давления газа с помощью понижающего механического редуктора, разделяющего коллектор на контуры высокого давления (ВД) и низкого давления (НД), при этом СУ производит контроль давления в обоих контурах и в соответствии с алгоритмом управления (АУ) подает команды: на задействование второго и последующих источников рабочего тела при понижении давления в контуре ВД ниже допустимого для корректной работы редуктора, на открытие всех ЭМБУ при случайном превышении максимально допустимого давления в контуре НД для сброса излишка газа в окружающую среду, не оказывая при этом влияния на управление КА.
Кроме того, понижение давления газа может осуществляться с возможностью изменения уровня давления в контуре НД за счет применения понижающего редуктора с электромагнитным приводом, режим работы которого изменяется согласно командам СУ.
Контроль допустимых уровней давления в контурах ВД и НД может осуществляться по показаниям трех датчиков в каждом контуре с последующим сравнением и исключением заведомо ложных показаний при выходе из строя одного из датчиков, согласно АУ.
Стабилизация давления в контуре НД непосредственно перед ЭМБУ может производиться с помощью ресивера-демпфера.
С точки зрения конструкции это достигается за счет того, что имеющаяся ТДУ, содержащая в качестве источника рабочего тела твердотопливные газогенераторы (ТТГГ), ЭМБУ и соединяющий их коллектор с установленным в нем датчиком давления, снабжена ресивером-накопителем в виде емкости, установленной на выходе из ТТГГ, и понижающим редуктором, установленным после ресивера-накопителя и разделяющим коллектор ТДУ на контуры НД и ВД, в каждом из которых установлены датчики давления, связанные электрической связью с СУ.
В контуре НД дополнительно может быть установлен ресивер-демпфер в виде емкости, внутренняя полость которого соединена газоходами со входом в ЭМБУ.
Ресиверы-демпферы могут быть установлены перед каждым ЭМБУ, и их минимальный объем определяется по формуле:

n - количество ЭМБУ, связанных с ресивером-демпфером;
k - допустимый разброс давления в ресивере-демпфере;
 - секундный объемный расход продуктов сгорания через один ЭМБУ;
- секундный объемный расход продуктов сгорания через один ЭМБУ;
τ - минимальное время нахождения ЭМБУ в открытом состоянии. Составные части ТДУ могут быть смонтированы на основании в виде пластины, снабженной местами крепления для установки в КА, при этом на пластине выполнены ребра и местные выборки, обеспечивающие оптимальное соотношение жесткостных и массовых характеристик.
В контурах ВД и НД установлены блоки датчиков, в каждом из которых может размещаться по 3 датчика давления, связанных электрической связью с СУ, и по одному датчику в каждом контуре, связанных с телеметрической системой регистрации параметров КА.
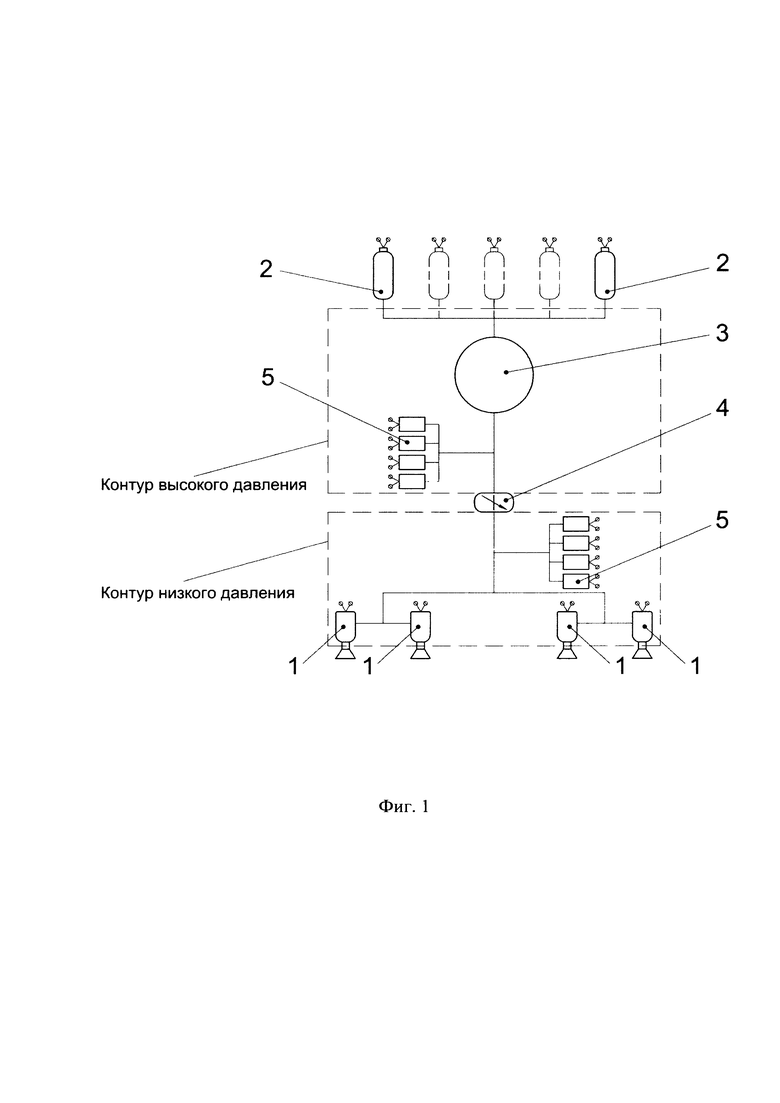
На фиг. 1 показана принципиальная схема ТДУ.
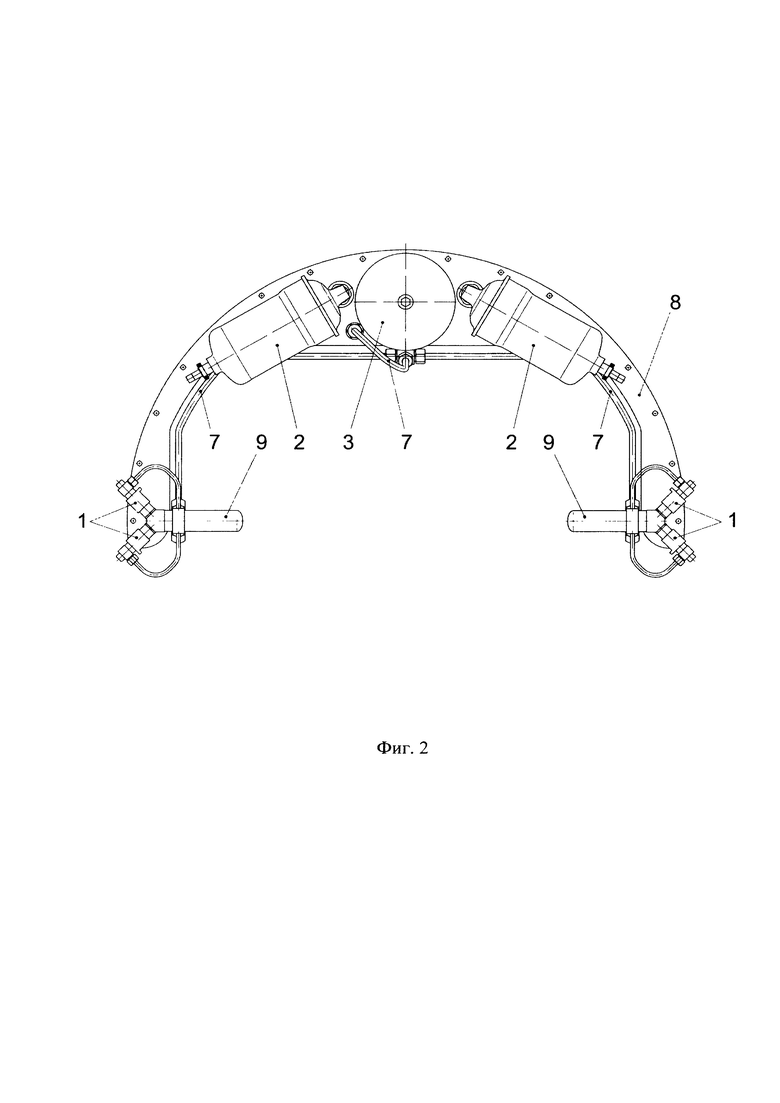
На фиг. 2 показан вариант компоновки ТДУ (вид сверху).
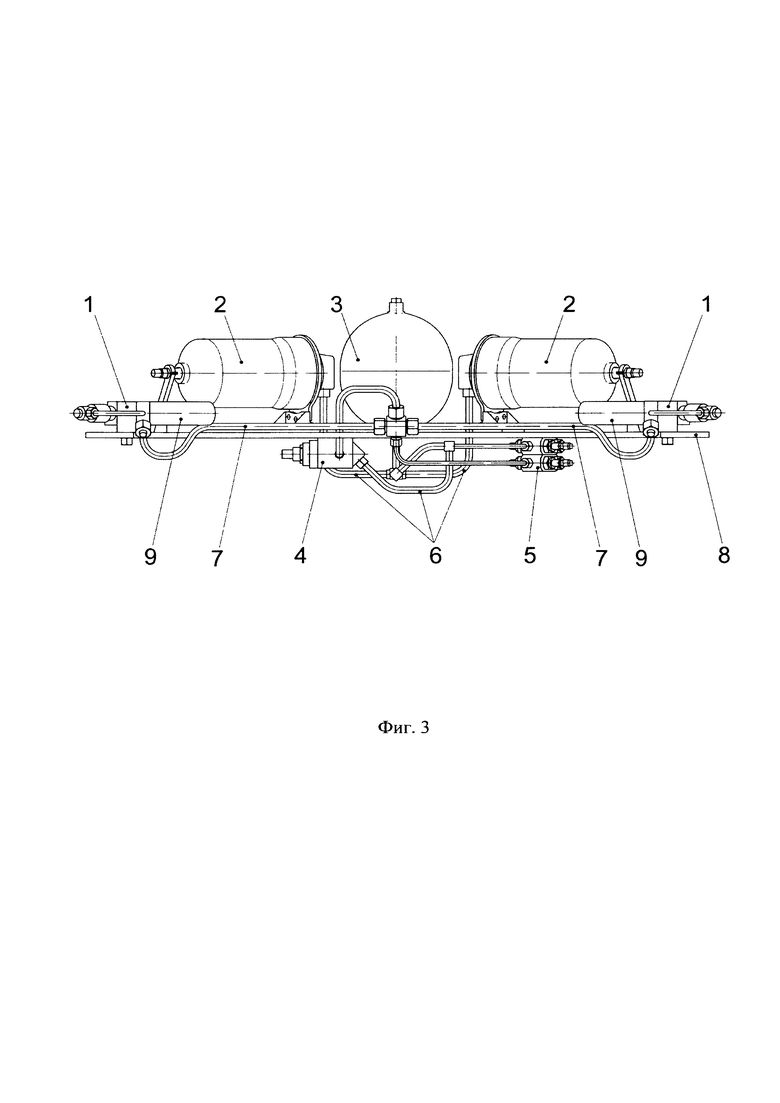
На фиг. 3 показан вариант компоновки ТДУ (вид спереди).
ТДУ состоит из ЭМБУ (1), ТТГГ (2), ресивера-накопителя (3), установленного на выходе из ТТГГ (2), редуктора (4), установленного на выходе из ресивера-накопителя (3) и разделяющего коллектор на контуры ВД (6) и НД (7), блоков датчиков (5), расположенных в контурах ВД (6) и НД (7), ресивера-демпфера (9) и основания (8), на котором установлены элементы ТДУ.
ТДУ работает следующим образом:
По команде от СУ срабатывает первый ТТГГ (2), продукты сгорания которого поступают в ресивер-накопитель (3) контура ВД (6). Далее они проходят через редуктор (4), понижающий давление, и истекают по коллектору контура НД (7) к ЭМБУ (1), открывающихся/закрывающихся по командам СУ и создают управляющие усилия для корректировки траектории полета КА. Блок датчиков (5) в контуре ВД (6) контролирует давление газа в ресивере-накопителе (3), которое постепенно снижается по мере расходования продуктов сгорания через ЭМБУ (1), и при достижении минимально допустимого для корректной работы редуктора (4) уровня давления газа, СУ дает команду на запуск второго и последующих ТТГГ (2). Блок датчиков (5) в контуре НД (7) контролирует уровень давления газа, и при случайном превышении давления газа выше допустимого, СУ дает команду на одновременное открытие всех ЭМБУ (1) для сброса давления. Так как вектор тяги всех ЭМБУ (1) направлен в радиальном направлении, и все они находятся попарно симметрично относительно оси КА, их одновременное открытие не оказывает влияния на управление КА. Ресивер-демпфер (9) стабилизирует давление в контуре НД (7), сглаживая динамические колебания, возникающие как следствие переходных процессов при открытии/закрытии редуктора (4), для поддержания максимально высокой точности уровня тяги создаваемой ЭМБУ (1). Минимальный объем Vmin ресивера-демпфера (9) определяется по формуле:
n - количество ЭМБУ, связанных с ресивером-демпфером;
k - допустимый разброс давления в ресивере-демпфере;
- секундный объемный расход продуктов сгорания через один ЭМБУ;
τ - минимальное время нахождения ЭМБУ в открытом состоянии.
В каждом блоке датчиков (5) установлено по три датчика для СУ и по одному датчику для телеметрической регистрации давления. Установка трех датчиков для СУ позволяет составить АУ таким образом, чтобы при возникновении критичной разницы показаний одного датчика относительно двух других вследствие выхода первого из строя, показания вышедшего из строя датчика не препятствовали корректной работе СУ.
Редуктор (4) может быть выполнен с электромагнитным приводом, связанным электрической связью с СУ. В этом случае открытие/закрытие проходного сечения редуктора (4) осуществляется электромагнитом, команды для которого поступают от СУ по показаниям датчиков ВД и НД.
Совокупность изложенных способа и конструкции ТДУ позволяет повысить точность и надежность функционирования ТДУ, свести к минимуму газодинамические колебательные процессы. Применение ТТГГ в ТДУ дает возможность максимально увеличить гарантийные сроки ТДУ, а также исключить заправочные и контрольные операции перед стартом, а за счет последовательного включения ТТГГ и многократного заполнения ресивера-накопителя газом - снизить массу ТДУ. Последовательное включение ТТГГ с последующей стабилизацией газа в ресивере-накопителе позволяет выполнять требования к общему времени готовности ТДУ для создания импульса тяги через ЭМБУ, при этом общее время готовности может существенно превышать суммарное время активной работы.
Применение понижающего редуктора с электромагнитным приводом позволяет перейти на режим пониженной тяги для более точного управления малогабаритными объектами на доводочном участке, что в итоге повышает точность управления, маневренность и точность дозирования суммарного импульса тяги ТДУ. Положительный эффект в плане точности регулирования достигается за счет того, что точность датчика (до ±3%) значительно выше, чем разброс параметров регулирующего органа, например пружины (≈±10%).
Установка в каждом контуре трех датчиков и применение алгоритма сравнения дает возможность исключить заведомо ложные показания в том случае, если один из датчиков выйдет из строя.
Установка перед ЭМБУ ресивера-демпфера дает возможность сгладить колебания в контуре НД, возникающие при открытии/закрытии проходного сечения редуктора, что в итоге обеспечивает точность тяги ЭМБУ до ±2%.
Установка всех элементов ТДУ на едином основании максимально упрощает ее монтаж в отсеке, позволяя заранее выполнять вне отсека КА такие операции, как подгибка и фиксация положения газоходов, проверка герметичности ТДУ и т.п., а также упрощает проведение стендовой отработки и приемно-сдаточных испытаний. Основание выполнено в виде пластины снабженной местами крепления для установки в КА. Пластина имеет ребра и местные выборки, обеспечивающие оптимальные соотношения жесткостных и массовых характеристик.
ТДУ предлагаемой конструкции планируется использовать при создании перспективных КА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Твердотопливная двигательная установка для космического аппарата | 2021 |
|
RU2762215C1 |
| Твёрдотопливная двигательная установка многократного включения и способ ее многократного включения | 2018 |
|
RU2709117C1 |
| Способ выведения полезного груза на околоземные орбиты с помощью космической ракеты-носителя | 2018 |
|
RU2703763C1 |
| РАКЕТА КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 1992 |
|
RU2025645C1 |
| Стендовое устройство для определения суммарного импульса тяги твердотопливной газореактивной системы ориентации, снабженной газонакопительной емкостью, и способ определения суммарного импульса тяги твердотопливной газореактивной системы ориентации с газонакопительной емкостью | 2021 |
|
RU2756361C1 |
| Головная часть космической ракеты-носителя и способ выведения космических аппаратов | 2018 |
|
RU2698838C1 |
| СПОСОБ ДОСТАВКИ ПОЛЕЗНОГО ГРУЗА ТВЕРДОТОПЛИВНОЙ РАКЕТОЙ НА ОКОЛОЗЕМНУЮ ОРБИТУ И ТВЕРДОТОПЛИВНАЯ РАКЕТА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2072952C1 |
| Газогенераторная система | 2023 |
|
RU2806846C1 |
| ЖИДКОСТНАЯ РАКЕТНАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА КОСМИЧЕСКОГО АППАРАТА | 2021 |
|
RU2760369C1 |
| Ракетный двигатель твердого топлива | 2021 |
|
RU2771220C1 |
Изобретение относится к области ракетно-космической техники и может быть использовано при создании двигательных установок (ДУ) для управляемых космических аппаратов (КА). Технический результат – повышение эффективности управления двигательной установки космического аппарата за счет сглаживания динамики и эффективного использования рабочего тела, а также повышение надежности работы устройства. Способ управления твердотопливной двигательной установкой заключается в изменении импульса и вектора тяги твердотопливной двигательной установки с помощью комбинации открывающихся и закрывающихся по командам от системы управления сопловых электромагнитных блоков управления. Через эти блоки обеспечивают истекание газа под давлением, создаваемым источниками рабочего тела, проходящего через коллектор. В коллекторе производят телеметрический контроль давления с помощью датчиков. При этом на выходе из последовательно задействуемых источников рабочего тела производят накопление и стабилизацию давления газа в ресивере-накопителе. После этого производят понижение давления газа с помощью понижающего механического редуктора, разделяющего коллектор на контуры высокого и низкого давления. С помощью системы управления производят контроль давления в обоих контурах. В соответствии с алгоритмом управления подают команды на задействование второго и последующих источников рабочего тела. Команды подают при понижении давления в контуре высокого давления ниже допустимого для корректной работы редуктора, а также на открытие всех сопловых электромагнитных блоков управления при случайном превышении максимально допустимого давления в контуре низкого давления для сброса излишка газа в окружающую среду, не оказывая при этом влияния на управление космическим аппаратом. 2 н. и 8 з.п. ф-лы, 3 ил.
1. Способ управления твердотопливной двигательной установкой космического аппарата, заключающийся в изменении импульса и вектора тяги твердотопливной двигательной установки с помощью комбинации открывающихся и закрывающихся по командам от системы управления сопловых электромагнитных блоков управления, через которые обеспечивают истекание газа под давлением, создаваемым источниками рабочего тела, проходящего через коллектор, в котором производят телеметрический контроль давления с помощью датчиков, отличающийся тем, что на выходе из последовательно задействуемых источников рабочего тела производят накопление и стабилизацию давления газа в ресивере-накопителе, после чего производят понижение давления газа с помощью понижающего механического редуктора, разделяющего коллектор на контуры высокого и низкого давления, при этом с помощью системы управления производят контроль давления в обоих контурах и в соответствии с алгоритмом управления подают команды на задействование второго и последующих источников рабочего тела при понижении давления в контуре высокого давления ниже допустимого для корректной работы редуктора, а также на открытие всех сопловых электромагнитных блоков управления при случайном превышении максимально допустимого давления в контуре низкого давления для сброса излишка газа в окружающую среду, не оказывая при этом влияния на управление космическим аппаратом.
2. Способ управления твердотопливной двигательной установкой космического аппарата по п. 1, отличающийся тем, что понижение давления газа осуществляют с возможностью изменения уровня давления в контуре низкого давления за счет применения понижающего редуктора с электромагнитным приводом, режим работы которого изменяют согласно командам системы управления.
3. Способ управления твердотопливной двигательной установкой космического аппарата по п. 1, отличающийся тем, что контроль допустимых уровней давления в контурах высокого и низкого давления осуществляют по показаниям трех датчиков в каждом контуре и последующим сравнением и исключением заведомо ложных показаний при выходе из строя одного из датчиков, согласно алгоритму управления.
4. Способ управления твердотопливной двигательной установкой космического аппарата по п. 1, отличающийся тем, что стабилизацию давления в контуре низкого давления непосредственно перед электромагнитными блоками управления производят с помощью ресивера-демпфера.
5. Твердотопливная двигательная установка космического аппарата, содержащая в качестве источника рабочего тела твердотопливные газогенераторы, сопловые электромагнитные блоки управления, соединяющий их коллектор с установленными в нем датчиками давления и систему управления, обеспечивающую открывание и закрывание выходных сечений сопел электромагнитных блоков управления, отличающаяся тем, что твердотопливная двигательная установка снабжена ресивером-накопителем в виде емкости, установленной на выходе из твердотопливных газогенераторов, и понижающим редуктором, установленным после ресивера-накопителя и разделяющим коллектор на контуры низкого и высокого давления, в каждом из которых установлены датчики давления, связанные электрической связью с системой управления, обеспечивающей управление двигательной установкой по показаниям датчиков давления и алгоритму системы управления, при этом вектор тяги всех сопел электромагнитных блоков управления направлен в радиальном направлении и все они находятся попарно симметрично относительно оси космического аппарата.
6. Твердотопливная двигательная установка космического аппарата по п. 5, отличающаяся тем, что в контуре низкого давления дополнительно установлен ресивер-демпфер в виде емкости, внутренняя полость которого соединена газоходами с входом в сопловые электромагнитные блоки управления.
7. Твердотопливная двигательная установка космического аппарата по п. 5, отличающаяся тем, что ресиверы-демпферы установлены перед каждым сопловым электромагнитным блоком и их минимальный объем (Vmin) определен по формуле:

n - количество электромагнитных блоков управления, связанных с ресивером-демпфером;
w - секундный объемный расход продуктов сгорания через один сопловый электромагнитный блок управления;
τ - минимальное время нахождения соплового электромагнитного блока в открытом состоянии;
k - допустимый разброс давления в ресивере-демпфере.
8. Твердотопливная двигательная установка космического аппарата по п. 5, отличающаяся тем, что редуктор выполнен с электромагнитным приводом, связанным электрической связью с системой управления.
9. Твердотопливная двигательная установка космического аппарата по п. 5, отличающаяся тем, что ее составные части смонтированы на основании в виде пластины, снабженной местами крепления для установки в космический аппарат, при этом на пластине выполнены ребра и местные выборки, обеспечивающие оптимальное соотношение жесткостных и массовых характеристик.
10. Твердотопливная двигательная установка космического аппарата по п. 5, отличающаяся тем, что в контурах высокого и низкого давления установлены блоки датчиков, в каждом из которых размещены по 3 датчика давления, связанных электрической связью с системой управления, и по одному датчику в каждом контуре, связанных с телеметрической системой регистрации параметров двигательной установки.
| РАКЕТА КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 1992 |
|
RU2025645C1 |
| RU 2070979 С1, 27.12.1996 | |||
| РАКЕТА-НОСИТЕЛЬ КОМБИНИРОВАННОЙ СХЕМЫ | 2000 |
|
RU2166463C1 |
| РАКЕТНЫЙ ДВИГАТЕЛЬ ТВЕРДОГО ТОПЛИВА ДЛЯ УВОДА ОТДЕЛЯЕМЫХ ЧАСТЕЙ РАКЕТЫ | 2012 |
|
RU2513052C2 |
| ТВЕРДОТОПЛИВНАЯ РАКЕТА | 2011 |
|
RU2492417C2 |
| US 20030163986 A1, 04.09.2003. | |||

