Предлагаемое изобретение относится к области ракетно-космической техники и может быть использовано при разработке способов выведения полезных грузов на околоземные орбиты.
Известно описание изобретения «Способ доставки полезного груза твердотопливной ракетой на околоземную орбиту и твердотопливная ракета для его осуществления» патент RU 2072952 c1, МПК B64G 1/14, опубликован 10.02.1997 г. В этом изобретении описан способ, связанный с уменьшением воздействия истекающих продуктов сгорания из твердотопливных двигательных установок (ДУ) разгонных ступеней и управляющих двигателей на полезный груз, установленный в передней части многоступенчатой космической ракеты-носителя (КРН). Особенно это касается последней разгонной ступени и ДУ доводочной ступени, расположенных в непосредственной близости от полезного груза в ситуации, когда обтекатель, прикрывающий полезный груз, уже сброшен. В этом способе, при спаде давления в камере ДУ последней ступени до минимального уровня, включают газореактивную систему ориентации (ГРСО), по окончании работы которой последовательно совершают операции по разделению, включению ДУ доводочной ступени по толкающей схеме и расхождению последней разгонной и доводочной ступеней, при этом узлы разделения этих ступеней дополнены двигателями, находящимися на последней разгонной ступени, ориентированными своими сопловыми блоками в сторону полезного груза (тянущая схема) под углом к продольной оси ракеты. Для простоты, при дальнейшем изложении, будем называть их тормозными двигателями (что эквивалентно первоначальному названию). В конце работы ДУ доводочной ступени обнуляют тягу ДУ путем вскрытия дополнительных сопел, осуществляя гашение ДУ, затем отделяют полезный груз.
Данное изобретение было принято авторами за прототип.
Недостатки прототипа связаны, в основном, с наличием отделяемой от последней ступени ракеты доводочной ступени, а также со схемой функционирования доводочной ступени и заключаются в следующем:
1. Отделение доводочной ступени включает операции по механическому и электрическому разделению стыковочных плоскостей путем срабатывания пиротехнических средств (разрывных болтов, пирозамков, пиропатронов включения тормозных двигателей, пироразделителей электрических цепей и т.д.). Наличие большого количества пиросредств связано с увеличением количества электрических цепей и длин кабелей, количества команд, большей емкости источников питания и, соответственно, массы приборов системы управления (СУ), кабелей и элементов конструкции;
2. Разделение стыка последней разгонной и доводочной ступеней сопровождается ударной нагрузкой, которая передается на находящиеся поблизости командные приборы СУ в приборном отсеке, что может снизить надежность их работы;
3. Включение тормозных двигателей последней ступени с соплами, направленными в сторону полезного груза сопровождается истечением высокотемпературных продуктов сгорания, которые могут воздействовать на оптические и другие чувствительные элементы полезного груза, не имеющие защиты.
4. Обнуление тяги ДУ доводочной ступени сопровождается дополнительными ударными воздействиями на командные приборы СУ и полезного груза, что может привести к снижению их надежности, а дополнительные пиросредства и кабели, проведенные к устройствам обнуления тяги, увеличивают затраты массы;
5. Скорость движения доводочной ступени к моменту отделения ПГ обладает существенным разбросом.
Задача изобретения заключается в том, чтобы предложить способ выведения ПГ на околоземную орбиту, который позволит повысить надежность выведения ПГ путем исключения нежелательного воздействия I на него и уменьшения количества ударных воздействий на него, массы конструкции последней и доводочной ступеней или, соответственно, увеличения массы ПГ, а также улучшить способ выведения ПГ и повысить его точность.
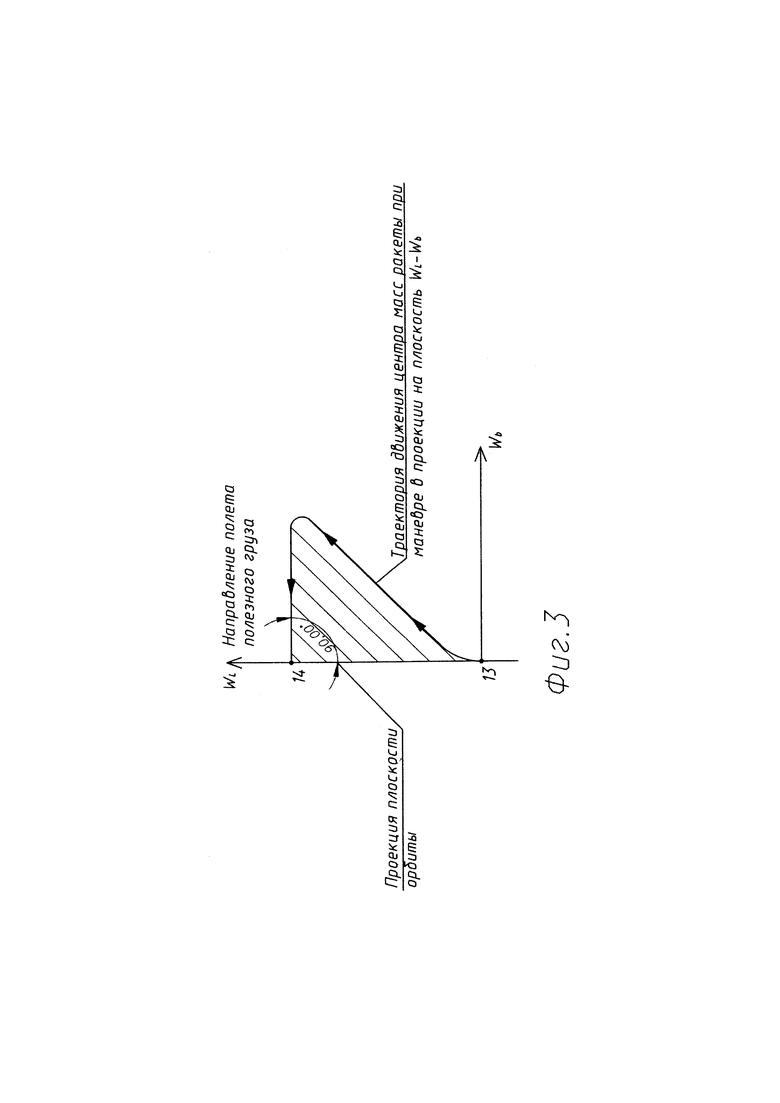
Решение поставленной задачи достигается тем, что в известном способе выведения полезного груза на околоземные орбиты с помощью космической ракеты-носителя (РН), заключающийся в последовательной работе двигательных установок (ДУ) разгонных ступеней, начиная с ДУ I ступени, при котором после окончания работы ДУ предыдущей разгонной ступени производят ее отделение от ракеты-носителя (РН) и осуществляют запуск последующей разгонной ступени, при этом к концу работы ДУ предпоследней разгонной ступени обеспечивают выход РН за пределы атмосферы на высоту более 100 км, при достижении давления в камере ДУ предпоследней разгонной ступени уровня 1 кг/см производят ее отделение по пенальной схеме, включают газореактивную систему ориентации (ГРСО), расположенную на сопловом блоке ДУ последней ступени, на временном интервале между отделением ДУ предпоследней разгонной ступени и началом работы ДУ последней разгонной ступени с работающей ГРСО осуществляют отделение обтекателя и дополнительный набор высоты до величины, близкой к высоте апогейной точки орбиты, включают ДУ последней разгонной ступени, обеспечивая в процессе ее работы разворот вектора скорости ступени на угол к местному горизонту, равный нулю, к концу работы этой ступени осуществляют дополнительный набор скорости до величины, близкой к первой космической скорости, в процессе работы ДУ доводочной ступени осуществляют коррекцию кинематических параметров, отделяют ПГ с использованием толкателей, отличающийся тем, что в конце работы ДУ последней разгонной ступени при уровне давления в камере ДУ ниже 1 кг/см2 включают ДУ доводочной ступени, осуществляют коррекцию кинематических параметров при работе управляющих сопел по толкающей схеме, в процессе работы этой ДУ с помощью СУ РН компенсируют разбросы скорости предыдущей разгонной ступени, осуществляют контроль текущих значений кинематических параметров по траектории ракеты в составе доводочной ступени и отработавшей ДУ последней разгонной ступени и их соответствия заданным конечным значениям, при достижении значений контролируемых параметров, близких к конечным, до завершения работы ДУ доводочной ступени начинают осуществлять маневр типа «петля», в поле кажущихся скоростей (WL, WB), совершаемый центром масс (ЦМ) ракеты в плоскости, перпендикулярной плоскости орбиты для уменьшения разбросов скорости в направлении полета ПГ (WL), завершают маневр в расчетной точке пересечения под прямым углом конечного участка траектории ЦМ ракеты с плоскостью орбиты, соответствующей полному выгоранию топлива ДУ доводочной ступени, при этом продолжительность и амплитуда маневра определяются с учетом выжигания остатков топлива, находящихся в ДУ доводочной ступени к моменту начала маневра, для обеспечения заданного углового положения ступени включают ГРСО, при этом сопла ГРСО установлены так, что проекция тяги толкающих сопел равна проекции тяги тянущих сопел, за счет чего результирующая проекция тяги ГРСО на продольную ось ракеты равна нулю, разворачивают ракету на угол, соответствующий совпадению ее продольной оси с плоскостью орбиты, придают заданную ориентацию ракеты соплами ГРСО, перед отделением ПГ с использованием толкателей.
Описание предлагаемого способа иллюстрируется следующими рисунками:
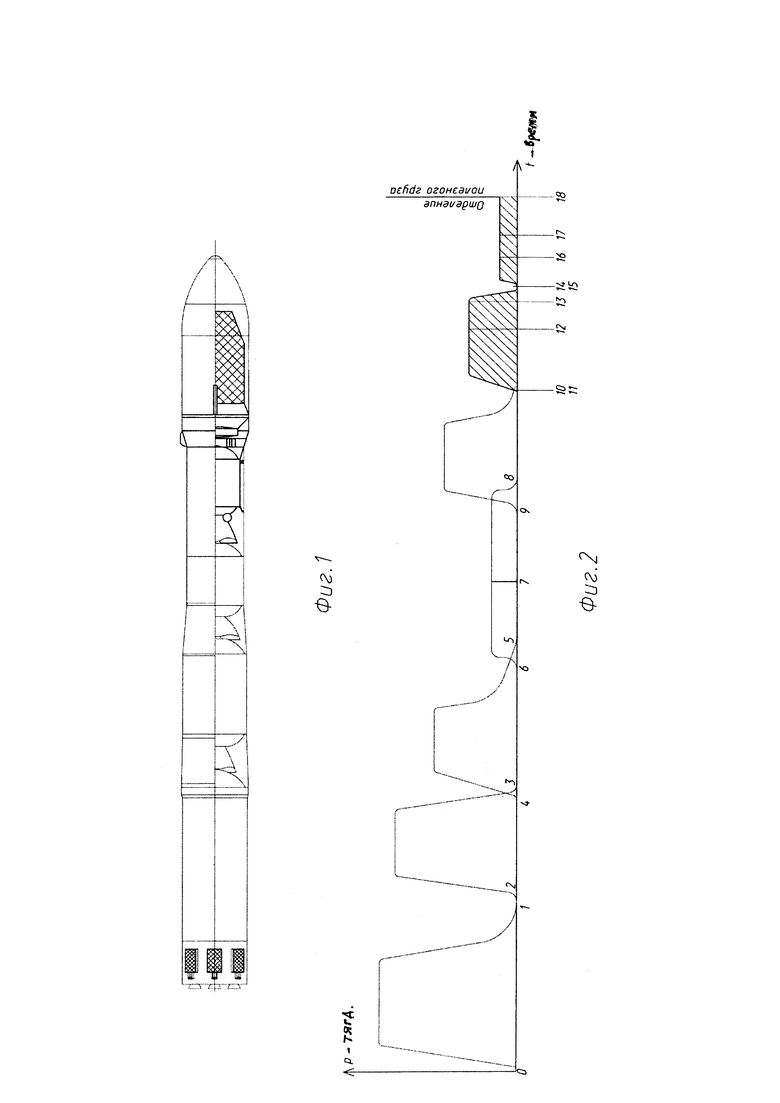
Фиг. 1 - конструктивная схема ракеты
Фиг. 2 - функциональная схема работы ДУ разгонных и доводочной ступени и ГРСО.
Фиг. 3 - схема маневра типа «петля» ракеты на участке работы ДУ доводочной ступени.
Способ выведения ПГ на околоземные орбиты с помощью КРН основан на применении последовательно работающих ДУ разгонных первой (0…1), второй (2…3), третьей (4…5), последней и доводочной ступеней с длительным временным промежутком с работающей ГРСО (6…8) между окончанием работы ДУ третьей разгонной ступени (5) и началом работы ДУ последней разгонной ступени (9) с проведением паузы (7) для сброса обтекателя, при этом в конце работы ДУ последней разгонной ступени (10) и включают ДУ доводочной ступени (11), управляющие сопла которой направлены по толкающей схеме, в процессе работы этой ДУ с помощью СУ РН осуществляют контроль текущих значений кинематических параметров и их соответствие заданных конечным значениям (12), начинают осуществлять маневр типа «петля» (13) с завершением этого маневра в расчетной точке пересечения траектории центра масс (ЦМ) ракеты с плоскостью орбиты, соответствующей полному выгоранию топлива ДУ (14) при этом продолжительность и амплитуда маневра определяются с учетом выгорания остатков топлива, находящихся в ДУ доводочной ступени к началу маневра, далее включают ГРСО (15), результирующая проекция тяги которой на продольную ось ступени равна нулю, осуществляют разворот ракеты на угол, необходимый для совпадения ее продольной оси с плоскостью орбиты (16), обеспечивают управление угловым положением ракеты для придания заданной ориентации ПГ к моменту отделения (17), отделяют ПГ (18) с использованием силы толкателей.
Таким образом, предлагаемое изобретение содержит способ выведения полезного груза с помощью многоступенчатой КРН, который позволит повысить надежность выведения ПГ путем исключения как нежелательного воздействия продуктов сгорания ДУ, так и ударного воздействия на полезный груз при отсутствии самого факта разделения последней и доводочной ступеней, что также уменьшает массу конструкции, кроме того, при реализации данного способа можно ожидать улучшения точностных показателей из-за уменьшения разбросов кинематических параметров в связи с введением маневра ракеты в конце работы ДУ доводочной ступени для дожигания остатков топлива, находящихся в ней и последующего участка с работающей ГРСО вплоть до отделения полезного груза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Головная часть космической ракеты-носителя и способ выведения космических аппаратов | 2018 |
|
RU2698838C1 |
| СПОСОБ ДОСТАВКИ ПОЛЕЗНОГО ГРУЗА ТВЕРДОТОПЛИВНОЙ РАКЕТОЙ НА ОКОЛОЗЕМНУЮ ОРБИТУ И ТВЕРДОТОПЛИВНАЯ РАКЕТА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2072952C1 |
| МНОГОСТУПЕНЧАТАЯ КОСМИЧЕСКАЯ РАКЕТА-НОСИТЕЛЬ | 2005 |
|
RU2265560C1 |
| РАКЕТА КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 1992 |
|
RU2025645C1 |
| СПОСОБ ВЫВОДА ПОЛЕЗНОГО ГРУЗА В ОКОЛОЗЕМНОЕ ПРОСТРАНСТВО С ИСПОЛЬЗОВАНИЕМ АВИАЦИОННОГО РАКЕТНО-КОСМИЧЕСКОГО КОМПЛЕКСА И АВИАЦИОННЫЙ РАКЕТНО-КОСМИЧЕСКИЙ КОМПЛЕКС | 2005 |
|
RU2265558C1 |
| КОСМИЧЕСКИЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ОБЕСПЕЧЕНИЯ УСЛУГ ПО ЗАПУСКУ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ КОСМИЧЕСКОГО РАКЕТНОГО КОМПЛЕКСА | 2001 |
|
RU2179941C1 |
| СПОСОБ ПЕРЕОБОРУДОВАНИЯ БОЕВЫХ ТВЕРДОТОПЛИВНЫХ РАКЕТ В ТВЕРДОТОПЛИВНУЮ РАКЕТУ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ И РАКЕТА КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 1998 |
|
RU2142898C1 |
| СПОСОБ ВЫВОДА ПОЛЕЗНОГО ГРУЗА В ОКОЛОЗЕМНОЕ ПРОСТРАНСТВО | 1994 |
|
RU2078010C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ, ПЕРЕОБОРУДОВАННОЙ ИЗ МНОГОСТУПЕНЧАТОЙ ЖИДКОСТНОЙ БАЛЛИСТИЧЕСКОЙ РАКЕТЫ | 2020 |
|
RU2751731C1 |
| СПОСОБ УПРАВЛЕНИЯ АВИАЦИОННО-КОСМИЧЕСКОЙ СИСТЕМОЙ ДЛЯ ВЫВЕДЕНИЯ ПОЛЕЗНОГО ГРУЗА | 1999 |
|
RU2160214C1 |
Изобретение относится к ракетной технике, а более конкретно к выведению на орбиту груза ракетой-носителем. Способ выведения полезного груза на околоземные орбиты с помощью космической ракеты-носителя включает последовательную работу разгонных ступеней и отделение полезного груза с использованием толкателей. Работают двигательные установки (ДУ) первой (0…1), второй (2…3), третьей (4…5), последней и доводочной ступеней. Газореактивная система ориентации (ГРСО) работает (6…8) между окончанием работы третьей ступени (5) и началом работы ДУ последней разгонной ступени (9) с проведением паузы (7) для сброса обтекателя. В конце работы ДУ последней ступени (10) и включают ДУ доводочной ступени (11). В процессе работы этой ДУ с помощью системы управления осуществляют контроль текущих значений кинематических параметров и их соответствие заданным конечным значениям (12) и начинают осуществлять маневр типа «петля» (13) с завершением этого маневра в расчетной точке пересечения траектории центра масс (ЦМ) ракеты с плоскостью орбиты, соответствующей полному выгоранию топлива ДУ (14). Далее включают ГРСО (15), осуществляют разворот ракеты на угол, необходимый для совпадения ее продольной оси с плоскостью орбиты (16), обеспечивают управление угловым положением ракеты для придания заданной ориентации ПГ к моменту отделения (17) и отделяют ПГ (18). Достигается повышение надежности. 3 ил. 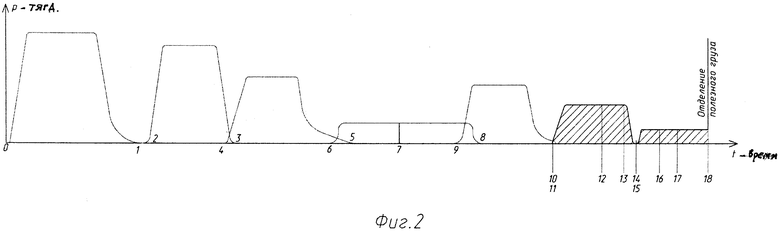
Способ выведения полезного груза на околоземные орбиты с помощью космической ракеты-носителя (РН), заключающийся в последовательной работе двигательных установок (ДУ) разгонных ступеней, начиная с ДУ I ступени, при котором после окончания работы ДУ предыдущей разгонной ступени производят ее отделение от ракеты-носителя (РН) и осуществляют запуск последующей разгонной ступени, при этом к концу работы ДУ предпоследней разгонной ступени обеспечивают выход РН за пределы атмосферы на высоту более 100 км, при достижении давления в камере ДУ предпоследней разгонной ступени уровня 1 кг/см2 производят ее отделение по пенальной схеме, включают газореактивную систему ориентации (ГРСО), расположенную на сопловом блоке ДУ последней ступени, на временном интервале между отделением ДУ предпоследней разгонной ступени и началом работы ДУ последней разгонной ступени с работающей ГРСО осуществляют отделение обтекателя и дополнительный набор высоты до величины, близкой к высоте апогейной точки орбиты, включают ДУ последней разгонной ступени, обеспечивая в процессе ее работы разворот вектора скорости ступени на угол к местному горизонту, равный нулю, к концу работы этой ступени осуществляют дополнительный набор скорости до величины, близкой к первой космической скорости, в процессе работы ДУ доводочной ступени компенсируют разбросы скорости предыдущей разгонной ступени, осуществляют коррекцию кинематических параметров, отделяют полезный груз (ПГ) с использованием толкателей, отличающийся тем, что в конце работы ДУ последней разгонной ступени при уровне давления в камере ДУ ниже 1 кг/см2, включают ДУ доводочной ступени, с управляющими соплами, которые направлены по толкающей схеме, в процессе работы этой ДУ компенсируют разбросы скорости предыдущей разгонной ступени, с помощью системы управления (СУ), осуществляют контроль текущих значений кинематических параметров по траектории ракеты в составе доводочной ступени и отработавшей ДУ последней разгонной ступени и их соответствие заданным конечным значениям, при достижении значений контролируемых параметров, близких к конечным, до завершения работы ДУ доводочной ступени начинают осуществлять маневр типа «петля», совершаемый центром масс (ЦМ) ракеты в плоскости, перпендикулярной плоскости орбиты для уменьшения разбросов скорости в направлении полета ПГ, завершают маневр в расчетной точке пересечения под прямым углом конечного участка траектории ЦМ ракеты с плоскостью орбиты, соответствующей полному выгоранию топлива ДУ доводочной ступени, при этом продолжительность и амплитуда маневра определяются с учетом выжигания остатков топлива, находящихся в ДУ доводочной ступени к моменту начала маневра, для обеспечения заданного углового положения ступени включают ГРСО, при этом сопла ГРСО установлены так, что проекция тяги толкающих сопел равна проекции тяги тянущих сопел, за счет чего результирующая проекция тяги ГРСО на продольную ось ракеты равна нулю, разворачивают ракету на угол, соответствующий совпадению ее продольной оси с плоскостью орбиты, придают заданную ориентацию ракеты соплами ГРСО, перед отделением ПГ с использованием толкателей.
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА МЕЖПЛАНЕТНУЮ ТРАЕКТОРИЮ ПОЛЕТА | 2005 |
|
RU2289533C1 |
| US 4964340 A1, 23.10.1990 | |||
| US 6769651 B2, 03.08.2004. | |||

