Изобретение относится к геофизике, а именно, к способам определения опасности цунами при мониторинге подводных цунамигенных землетрясений путем раннего обнаружения признаков цунами.
Известны способы определения опасности цунами (патент RU № 2066468, 10.09.1999, заявка JP №2002117475, 19.04.2002, патент RU № 2156988, 27.09.2000, а.с.SU №1801203, 07.03.1993), включающие регистрацию преимущественно электрических сигналов или упругих колебаний, предвестников образования цунами, регистрацию колебаний, сравнение их с опорным сигналом, определение сейсмических параметров среды и по измеренным параметрам определение направления распространения волны и ее высоты.
Недостатком данных решений является относительно невысокая вероятность получения достоверных прогностических данных.
В известном способе обнаружения возможности наступления катастрофических явлений (патент RU №2030769, 10.03.1995), включающем измерение параметра геофизического поля в контролируемом районе и суждение по полученным данным о возможности наступления катастрофических явлений, при этом измерения производят непрерывно, выявляют колебания измеряемого параметра и при обнаружении синусоидальных колебаний возрастающей частоты, имеющих амплитуду, статистически достоверно отличающуюся от фоновой для контролируемого района, и период от 100 до 1000000 сек, судят о наличии возможности наступления катастрофических явлений. Однако непосредственное использование этих сигналов в качестве прямых предвестников цунами осложнено наличием помех, создаваемых шумами морской среды различного происхождения, в связи с чем возникает задача выделения подводных сейсмических сигналов на фоне шумов морской среды.
Наиболее широкий спектр сигналов, а соответственно и более достоверный прогноз наступления катастрофических явлений, можно получить при использовании способа сейсмической разведки (патент RU №2030766, 10.03.1995), включающего возбуждение упругих колебаний, их регистрацию сейсмоприемниками, каждый из которых содержит три датчика, расположенных под углом 45 градусов к горизонтальной плоскости, и обработку полученных записей с выделением полезного сигнала, в котором одновременно возбуждают упругие волны Р- и S-типа.
В данном способе, как и в предыдущих аналогах, сигналы, обусловленные третичным приходом волн, не учитываются, что существенно снижает вероятность прогноза.
Среди известных аналогов наиболее близким к заявляемому решению является способ по пат. RU №2260819, опубл. 20.09.2005, в котором факт возникновения и направления распространения волны цунами устанавливают по сигналам устройств регистрации, размещенных в прибрежной зоне, по крайней мере, в двух точках в вертикальном направлении на глубинах не более 10 м вблизи берега и вдоль континентальных шельфов, а определение степени опасности волны цунами устанавливают по измеренному градиенту потенциала электрического поля и параметрам волнения в едином масштабе времени, по крайней мере на двух уровнях по вертикали путем сравнения их со значениями, полученными для спокойного моря.
Определение опасности цунами на более раннем этапе обеспечило бы возможность заблаговременного предупреждения населения о приближающейся опасности. Однако размещение регистрирующих устройств вдали от прибрежной зоны на глубинах более 100м снижает достоверность прогноза, так как известно, что наибольшая информативность этих первичных сигналов наблюдается на глубинах 6-10м от уровня прилива, вблизи берега и вдоль континентальных шельфов.
Задачей предлагаемого изобретения является повышение достоверности и оперативности прогнозирования цунами путем более раннего обнаружения признаков цунами при мониторинге параметров волнения.
Поставленная задача решается за счет того, что в способе определения опасности цунами для прибрежной и удаленных зон цунамигенных регионов путем определения параметров волнения с помощью устройств определения параметров, соединенных трактом связи с наземными станциями приема и обработки сейсмических сигналов службы предупреждения о цунами, установленными в прибрежных зонах цунамигенных регионов, в отличие от прототипа в качестве устройств определения параметров волнения используют устройства, установленные на борту летательных аппаратов, выполняющих регулярные рейсы в цунамигенных регионах, с возможностью их взаимодействия с навигационными спутниковыми аппаратами (ГЛОНАСС или GPS) и с водной поверхностью цунамигенных регионов (океанов), при этом для определения параметров волнения при измерении высоты от летательного аппарата до водной поверхности вычисляют геодезические координаты летательного аппарата (φо, λо, Hо) со смещением, обусловленным наклоном отражающей водной поверхности (океанов) относительно референц-эллипсоида по формуле:
(φо, λо, Hо) = (φг, λг, -Hг), (1)
где φо, λо, Hо – широта, долгота и высота летательного аппарата, φг, λг, -Hг – геодезические координаты соответственно; по вычисленным геодезическим координатам определяют наклон водной поверхности (океанов) по широте и долготе по формулам:
ΔЦφ = ΔSφ /2Н = Δφ М /2Н, (2)
ΔЦλ = ΔSλ /2Н = ΔλN /2Н, (3)
где ΔЦφ, ΔЦλ – наклон водной поверхности (океанов) по широте и долготе, M, N – радиусы кривизны нормального сечения и меридиана референц – эллипсоида; Δφ, Δλ – разности геодезических координат по данным устройств определения параметров волнения, при этом исключают ионосферную погрешность путем обработки спутниковой навигационной информации методом PrecisePointPosition, в свою очередь, на наземных станциях приема и обработки сейсмических сигналов службы предупреждения о цунами по измеренным параметрам выполняют моделирование колебаний уровня водной поверхности океана, вызываемых атмосферными возмущениями с выделением сигнала цунами на шельфе с учетом неоднородной береговой линии и в открытом океане на фоне естественного длинноволнового шума с выделением длинных волн, для которых возникает эффект резонансного отражения, включая уединенные волны в форме холмов с периодом колебаний от 15 до 60 минут, при этом прогноз возникновения волны цунами составляют по двум выделенным уединенным волнам в форме холмов, следующих друг за другом с периодом колебаний от 15 до 60 минут и значениям наклона (ΔЦφ, ΔЦλ) выше 4-5угл.сек, при этом, если значения указанных величин наклонов повторяются в течение 2-х – 3-х циклов, то такая волна определяется как волна цунами.
Предлагаемый способ может быть реализован с помощью комплекса, содержащего наземную станцию приема и обработки сейсмических сигналов службы предупреждения о цунами, включающую: средства обработки сейсмической информации, выполненные в виде автоматизированных рабочих мест на основе быстродействующих ЭВМ, соединенных информационными линиями связи с устройствами регистрации сейсмической информации, размещенными в ионосфере, атмосфере, литосфере и гидросфере, как на подвижных носителях, так и стационарно, дополнительно содержит модуль обработки сейсмической и гидрометеорологической информации, включающий блок выделения уединенных волн в форме холмов с периодом колебаний от 15 до 60 минут и определения наклона выделенных волн, для классификации волны, как волны типа цунами, спутниковый канал связи с приемниками навигационной аппаратуры потребителей (НАП) и радиовысотомерами, установленными на летательных аппаратах, выполняющих регулярные рейсы в цунамигенных регионах, при этом приемники НАП снабжены двумя антеннами, одна из которых ориентирована в сторону навигационных спутниковых аппаратов (по оси Зенита), а вторая – в сторону водной поверхности океанов ( по оси Надира).
Сущность предлагаемого технического решения заключается в возможности более раннего обнаружения признаков цунами в виде длинных волн. В основе способа лежит постоянный мониторинг и вычисление параметров волнения вблизи зоны возможных землетрясений, что позволяет своевременно обнаружить возникновение длинных волновых откликов на сейсмические толчки. Способ основан на вычислении геометрической формы, параметров и направления перемещения длинных волн, дающем адекватные оценки возможности возникновения опасных морских явлений вблизи побережья. При поступлении информации о возможности наступления цунами на пункт приема и обработки сейсмических сигналов, непосредственно в процессе оперативного контроля и прогноза вычисленные данные могут уточняться на конкретных участках морского побережья, в бухтах и гаванях морских портов.
Сопоставление предлагаемого способа и прототипа показало, что поставленная задача – повышение достоверности и оперативности прогнозирования цунами – решается в результате новой совокупности признаков, что доказывает соответствие предлагаемого изобретения критерию патентоспособности «новизна».
В свою очередь, проведенный информационный поиск в области геофизики не выявил решений, содержащих отдельные отличительные признаки заявляемого способа, что позволяет сделать вывод о соответствии способа критерию «изобретательский уровень».
Сущность предлагаемого технического решения поясняется чертежами, где на фиг. 1. представлена схема измерения параметров океанских длинных волн типа цунами, на фиг.2. – блок-схема устройства реализации способа.
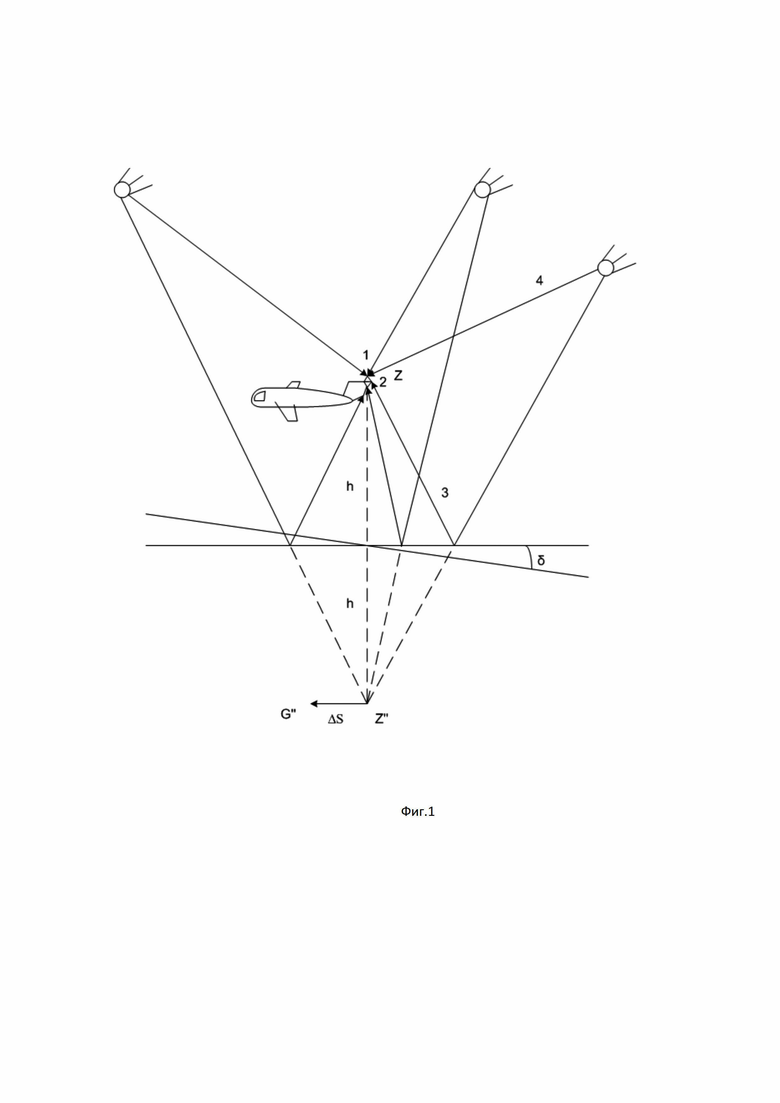
Схема измерения параметров океанских длинных волн типа цунами (фиг.1) содержит: приемные антенны 1, 2 бортового спутникового приемника с диаграммами направленности в верхней и нижней полусферах; (поз.3 и 4 обозначены отраженные от морской поверхности и прямые сигналы навигационного космического аппарата; ΔS – смещение под влиянием океанской длинной волны типа цунами обсервованного места по отраженным от морской поверхности сигналам антенны 2 относительно зеркально отраженного от поверхности референц – эллипсоида обсервованного места по сигналам антенны 1.
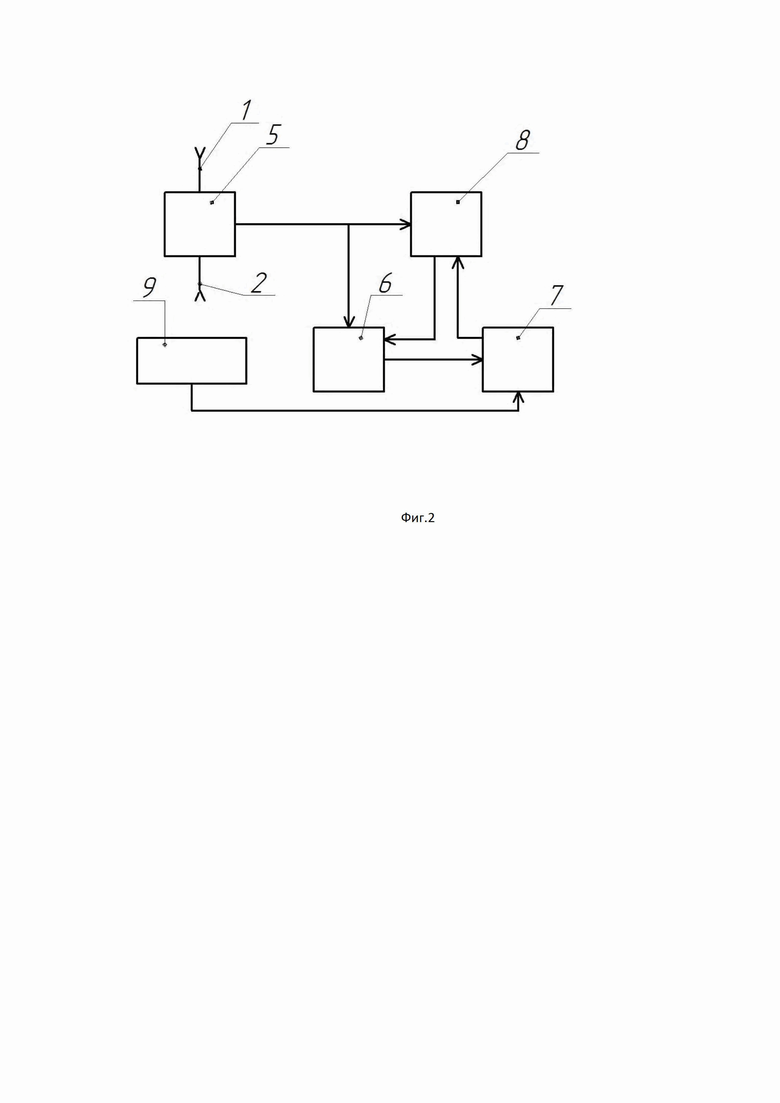
Блок-схема устройства для реализации способа (фиг.2) содержит бортовой приемник 5 НАП с приемными антеннами 1, 2 с диаграммами направленности в верхней (по оси Зенита) и нижней полусферах (по оси Надира), блок 6 учета эфемеридных погрешностей и погрешностей расхождения шкал времени, GSM – модем 7, персональный компьютер 8 со специальным программным обеспечением, который служит для записи, хранения и обработки результатов измерений, штатный радиовысотомер 9.
Блок-схема наземной станции приема и обработки сейсмических сигналов службы предупреждения о цунами и определения степени опасности волны цунами для охраняемого района включает устройство приема и средства обработки сейсмической информации, выполненные в виде автоматизированных рабочих мест на основе быстродействующих ЭВМ, устройства приема сейсмической информации, соединенные информационными линиями связи с устройствами регистрации сейсмической информации, размещенными в ионосфере, атмосфере, литосфере и гидросфере, как на подвижных носителях, так и стационарно. Наземная станция дополнительно содержит спутниковый канал связи с приемниками 5 навигационной аппаратуры потребителей (НАП) и радиовысотомерами 9, установленными на летательных аппаратах, выполняющих регулярные рейсы в цунамигенных регионах, модуль обработки сейсмической и гидрометеорологической информации, включающий блок выделения уединенных волн в форме холмов с периодом колебаний от 15 до 60 минут.
Устройство приема информации соединено информационными каналами с датчиками регистрации как цунамигенных параметров, так и параметров физических полей, размещенные в ионосфере, атмосфере, гидросфере и литосфере и основанные на различных принципах работы.
В качестве устройств регистрации могут быть использованы сейсмические датчики, датчики, измеряющие давление водяного столба, датчики измерения колебаний уровня моря, датчики измерения поверхностных и подводных течений, датчики для измерения атмосферного давления, датчики измерения скорости и направления ветра, устройства дистанционного зондирования водной поверхности, установленные в цунамигенном регионе.
Аналогом в части конструктивных элементов приемника 5 НАП является устройство, описание которого приведено в патенте US № 6549165В2, 15.04.2003. При этом посредством бортового приемника 5 НАП реализован способ выполнения высотометрии Земли, который включает этапы: приема восходящей антенной 1 (антенной с диаграммой направленности вверх) на борту платформы над поверхностью Земли прямых сигналов, имеющих по меньшей мере две разные несущие частоты, передаваемых спутниками ГНСС или GPS с учетом антенны 2 с диаграммой направленности вверх, приема нисходящей антенной (с диаграммой направленности вниз) на борту платформы сигналов, отраженных поверхностью Земли и имеющих по меньшей мере две разные несущие частоты, сравнения несущих фаз прямых сигналов и принятых отраженных сигналов на несущих частотах, что позволяет при их сравнении определить высоту океанской поверхности.
Антенна 1 с диаграммой направленности вверх предназначена для приема сигналов, передаваемых непосредственно спутниками навигационной системы ГНСС или GPS, таких как глобальная система позиционирования, в то время как антенна 2 с диаграммой направленности вниз, которая обычно может быть более ориентированной, чем антенна 1 с диаграммой направленности вверх, предназначена для приема сигналов, передаваемых спутниками ГНСС или GPS, которые отражаются поверхностью Земли, и в частности поверхностью океана. Обе антенны предназначены для приема как правой, так и левой круговой поляризации (LHCP и RHCP). Сигналы, принятые восходящей антенной 2, служат для определения по сигналам, передаваемым спутниками ГНСС или GPS, векторов времени T, временного положения PWGS-84 и временной дрейфовой скорости V, соответствующих текущему времени, положению и скорости приемника. Бортовой приемник 5 НАП принимает, по меньшей мере, два сигнала, имеющих разные несущие частоты, и предпочтительно три различных сигнала, имеющих соответствующие несущие частоты L1, L2, L5. Для достижения оптимальной производительности соответствующие частоты принимаемых сигналов должны быть надлежащим образом разнесены, причем две несущие частоты расположены близко друг к другу (L2 и L5), а третья несущая частота (L1) находится дальше от двух первых. Например, эти частоты следующие: L1=1575 МГц, L2=1227 МГц и L5=1176 МГц. Эти сигналы принимаются с обеих круговых поляризаций и каждый циркулярно поляризованный сигнал обрабатывается отдельно в бортовом приемнике 5 НАП.
Рассмотрим 2 примера выполнения способа, считая для простоты, что координаты фазовых центров приема антенн 1, 2 совпадают.
Пример 1. Морская поверхность в первом приближении совпадает с поверхностью референц-эллипсоида, не подвержена влиянию океанской длинной волны типа цунами и является отражающим плоским зеркалом. В этом случае, для каждого космического аппарата за счет отражения от морской поверхности увеличивается путь 3 прохождения отраженного сигнала до антенны 2 относительно пути 4 прямого сигнала до антенны 1. По законам геометрической оптики измеренные бортовым спутниковым приемником 5 координаты антенны 2 (точка Z” на фиг.1) будут зеркальным отражением относительно плоскости геоида измеренных НАП координат антенны 1 (точка Z на фиг.1). Так как в рассматриваемом случае поверхность геоида совпадает с поверхностью референц-эллипсоида, то (φо, λо, Hо) = (φг, λг, -Hг), где φ, λ, H – широта, долгота и высота антенны приемника 5 НАП.
Таким образом, при совпадении морской поверхности (геоида) с поверхностью референц-эллипсоида (то есть при отсутствии океанской длинной волны типа цунами), вычисленные в бортовом приемнике 5 НАП оценки геодезических координат (φ, λ) по измерениям прямых и отраженных координат совпадают, значения высоты Н – равны, но противоположны по знаку.
Пример 2. Морская поверхность наклонена относительно поверхности референц-эллипсоида на угол δ и близка по высоте к поверхности референц-эллипсоида. Аналогично по законам геометрической оптики, измеренные бортовым приемником 5 НАП координаты антенны 2 (точка Z” на фиг.1) будут зеркальным отражением относительно плоскости геоида измеренных бортовым приемником 5 НАП координат антенны 1 (точка Z на фиг.1). Так как в рассматриваемом случае поверхность геоида развернута относительно поверхности референц-эллипсоида на угол δ, то будет наблюдаться смещение (точка G” на фиг.1) относительно (точка Z” на фиг.1) на величину ΔS. Значение ΔS нетрудно найти из треугольника, ограниченного точками ZZ”G (фиг.1) с учетом малой величины δ:
ΔS = 2Н sinδ = 2Н δ. (1)
Например, при Н = 10 км = 1000000 см, Δ = 1” = 1/206280, имеем из формулы (1) ΔS = 2000000/206280 = 10 см.
Поскольку антенна 1 и антенна 2 на летательном аппарате могут быть размещены близко друг к другу, а разности высот точек Z и Z” не превышают 20 км, то при работе бортового приемника 5 НАП в фазовом дифференциальном режиме, по опыту использования геодезических приемников системы ГЛОНАСС, возможно измерение относительных координат точек Z” и G” (то есть смещения ΔS) с инструментальными погрешностями в единицы см. Тогда с учетом ранее приведенных численных оценок, имеется принципиальная возможность измерения и обнаружения океанских длинных волн типа цунами предлагаемым методом с инструментальной погрешностью в доли угл. сек.
Бортовой приемник 5 НАП предназначен для измерения составляющих наклона океанских длинных волн типа цунами состоит из двух приемных антенн 1,2 с диаграммами направленности в верхней и нижней полусферах. Приемник 5 выполнен с улучшенными характеристиками чувствительности и помехоустойчивости. Блок 6 предназначен для учета погрешностей и погрешностей расхождения шкал времени и своим входом информационно связан с опорными станциями для изменения погрешностей и погрешностей расхождения шкал времени, а своим выходом соединен с входом персонального компьютера 8 со специальным программным обеспечением для записи, хранения и обработки результатов измерений.
Поправки к эфемеридам (орбитам) спутников и времени излучения их сигналов могут приниматься из сети Интернет или при помощи GSM – модема 9 соответственно антеннами 1 и 2, и через бортовой приемник 5 НАП поступать на GSM – модем 9. Отсутствие в измерительном комплексе дорогих гироскопических и гравиметрических приборов позволит снизить его стоимость, до величины, сравнимой со стоимостью комплекта геодезического приемника системы ГЛОНАСС (не более 1,1 млн руб. за комплекс), в то же время использование высокоточных фазовых измерений обеспечит измерение составляющих наклона океанских длинных волн типа цунами с предельной инструментальной погрешностью не более 1 угл. сек. Размещение аппаратуры на самолетах обеспечит производительность съемки наклона океанских длинных волн типа цунами до 10 тыс. кв. км/ч и не потребует доработки самолетов, так как масса комплекса не превысит 20 кг при энергопотреблении не более 30 Вт. Конструкция бортового приемника 5 НАП и алгоритмы обработки принятых отраженных сигналов могут быть реализованы как в патенте US № 6549165В2, 15.04.2003.
Метод обработки спутниковой навигационной информации, называемый РРР (PrecisePointPosition) использует кодовые измерения дальности. В режиме РРР двухчастотный приемник исключает ионосферную погрешность, а опорные станции служат для измерения эфемеридных погрешностей и расхождения шкал времени. На основе измеренных данных сети опорных станций ГНСС в центре обработки данных уточняется действительное положение спутников ГНСС на орбитах и формируются поправки к бортовым спутниковым эфемеридам и расхождению системных шкал времени. При этом точность определения близка к фазовым измерениям дальности и равна примерно 2-3 см. Поправки к эфемеридам (орбитам) спутников и времени излучения их сигналов могут приниматься из сети Интернет или при помощи GSM – модема 8.
При скорости полета самолета V = 300 – 800 км/час и высоте полета самолета H = 2 – 10 км, диаметр зоны отражения сигналов от морской поверхности составит D = (6 – 8) Н = 12 – 80 км. При этом производительность съемки наклона океанских длинных волн типа цунами составит: Р = DV = 3600 – 64000 кв. км/час.
При времени осреднения данных в одном цикле 2-5 сек, если значения наклона океанских длинных волн над морской поверхностью в течение 2-3 циклов подряд превысят 4-5 угл. сек., то следует считать, что с самолета наблюдается волна типа цунами. Сообщение о волне типа цунами немедленно передается в береговой центр для дальнейшей обработки данных.
Одновременно с измерениями посредством бортового приемника 5 НАП выполняют измерение высоты волнения посредством штатного радиовысотомера 9. При полетах над водной поверхностью излучаемые радиовысотомером электромагнитные волны отражаются от водной поверхности от гребня и подошвы волны, что позволяет измерить и высоту волны, как разницу между высотой гребня и подошвы. Кроме того, при изменении высоты полета самолета по показаниям радиовысотомера, в частности, уменьшения приборной высоты на 0,5 – 1м и более с учетом изменения наклона средней океанской отражающей поверхности можно утверждать, что выявлена волна типа цунами.
На наземных станциях приема и обработки сигналов службы предупреждения о цунами по информации, поступающей от соответствующих измерительных датчиков устанавливают эпицентр подводного землетрясения, о чем оповещают соответствующие технические центры, в том числе экипажи рейсовых самолетов, находящихся в регионе подводного землетрясения.
После получения информации от средств измерения параметров океанской поверхности, установленных на рейсовых самолетах, по измеренным сигналам выполняют моделирование колебаний уровня океана, вызываемых атмосферными возмущениями с выделением сигнала цунами на шельфе с учетом неоднородной береговой линии и в открытом океане на фоне естественного длинноволнового шума с выделением длинных волн, для которых возникает эффект резонансного отражения, включая уединенные волны в форме холмов с периодом колебаний от 15 до 60 минут, прогноз возникновения волны цунами выполняют по двум выделенным уединенным волнам в форме холмов с периодом колебаний от 15 до 60 минут и значениям наклона для выделенных волн, при этом если значения наклонов в течении 2–3-х циклов превысят 4-5 угл.сек. Такая волна классифицируется как волна цунами.
При анализе выявленной волны цунами из зарегистрированных длинных волн принимаются следующие факторы: магнитуда более 7 по шкале Рихтера и центр землетрясения расположен под водой, зарегистрированные уединенные волны в форме холмов длинной от 10 до 100 км и более. При этом за каждой такой волной неизбежно следует другая такая же волна с периодом колебаний от 15 до 60мин (В.В. Шулейкин. Краткий курс физики моря. Гидрометеорологическое издательство. Л., 1959, с.105-108), скорость волны в открытом океане составляет 500 – 700км, регистрируют рэлеевскую волну – предвестника цунами, которая распространяется со скоростью примерно в 20 раз больше, чем волна цунами, расстояние между двумя уединенными волнами в форме холма 100км, высота волны менее 1м (Рабинович А.Б. Наблюдения цунами в открытом океане. Известия РАН, сер. Физика атмосферы и океана, 2014, т.50, №5, с.508-523, Рабинович А.Б. Длинные гравитационные волны в океане. СПб., Гидрометеоиздат, 1993, 326с.)
При этом, если измеренные параметры превышают параметры для спокойного моря более, чем на 75% для первого уровня и 50% для второго уровня и при этом параметры волнения имеют тенденцию дальнейшего синхронного увеличения, то опасность волны цунами составляет более 85%.
Предлагаемый способ позволяет выявить длинные волны, оценить их параметры и использовать полученные данные в меньшие сроки и существенно дешевле, чем ныне использующиеся методы, аналогично тому, как спутниковая геодезия производительнее и дешевле для потребителей, чем традиционные геодезические технологии.
Предлагаемое изобретение было создано специалистами Научного центра ФГБОУ ВО «Государственный университет морского и речного флота имени адмирала С.О. Макарова» в составе научно-исследовательской работы. Была создана модель (макет) устройства, произведены экспериментальные исследования и расчеты, показавшие возможность использования заявляемого способа.
Изложенное, позволяет сделать вывод о соответствии изобретения критерию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| АЛЬТИМЕТРИЧЕСКИЙ СПОСОБ ВЫПОЛНЕНИЯ МОРСКОЙ ВЫСОТОМЕТРИИ С ОПРЕДЕЛЕНИЕМ УКЛОНЕНИЯ ОТВЕСНОЙ ЛИНИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2727584C1 |
| Способ определения опасности цунами | 2020 |
|
RU2738589C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| БУЙКОВАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ДЛЯ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКОВ СИЛЬНЫХ ЗЕМЛЕТРЯСЕНИЙ И ЦУНАМИ | 2008 |
|
RU2410725C2 |
| ДРЕЙФУЮЩАЯ БУЙКОВАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ДЛЯ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКОВ СИЛЬНЫХ ЗЕМЛЕТРЯСЕНИЙ И ЦУНАМИ | 2008 |
|
RU2405176C2 |
| ИНДИКАТОР-СИГНАЛИЗАТОР ВОЛН ЦУНАМИ В ОТКРЫТОМ ОКЕАНЕ | 2013 |
|
RU2555498C2 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2254600C1 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА | 2010 |
|
RU2436134C1 |
Изобретение относится к области геофизики. Технический результат заключается в повышении достоверности прогнозирования цунами. Способ основан на определении параметров волнения с помощью устройств, соединенных трактом связи с наземными станциями приема и обработки сейсмических сигналов службы предупреждения о цунами, установленными в прибрежных зонах цунамигенных регионов. В качестве устройств определения параметров волнения используют устройства, установленные на борту летательных аппаратов, выполняющих регулярные рейсы в цунамигенных регионах, с возможностью их взаимодействия с навигационными спутниковыми аппаратами (ГЛОНАСС или GPS) и с водной поверхностью цунамигенных регионов (океанов), при этом для определения параметров волнения при измерении высоты от летательного аппарата до водной поверхности вычисляют геодезические координаты летательного аппарата (ϕо, λо, Hо) со смещением, обусловленным наклоном отражающей водной поверхности (океанов) относительно референц-эллипсоида, при этом исключают ионосферную погрешность путем обработки спутниковой навигационной информации методом PrecisePointPosition, в свою очередь, на наземных станциях приема и обработки сейсмических сигналов службы предупреждения о цунами по измеренным параметрам выполняют моделирование колебаний уровня водной поверхности океана, вызываемых атмосферными возмущениями с выделением сигнала цунами на шельфе с учетом неоднородной береговой линии и в открытом океане на фоне естественного длинноволнового шума с выделением длинных волн, для которых возникает эффект резонансного отражения, включая уединенные волны в форме холмов. Прогноз возникновения волны цунами составляют по двум выделенным уединенным волнам в форме холмов, следующих друг за другом. 1 з.п. ф-лы, 2 ил.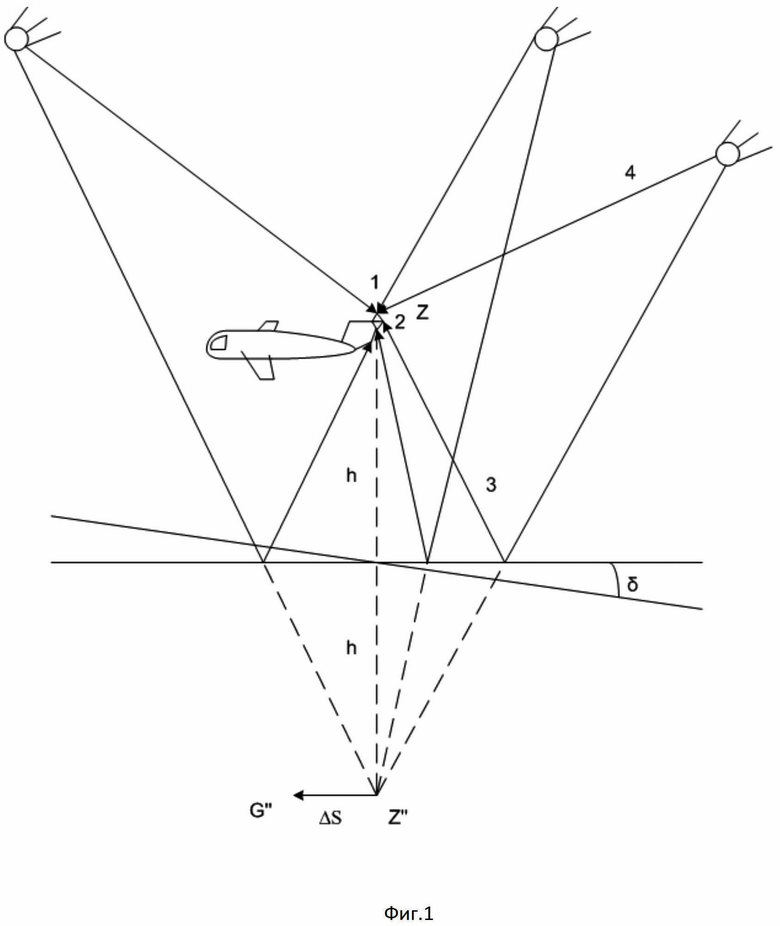
1. Способ определения опасности цунами для прибрежной и удаленных зон цунамигенных регионов, основанный на определении параметров волнения с помощью устройств, соединенных трактом связи с наземными станциями приема и обработки сейсмических сигналов службы предупреждения о цунами, установленными в прибрежных зонах цунамигенных регионов, отличающийся тем, что в качестве устройств определения параметров волнения используют устройства, установленные на борту летательных аппаратов, выполняющих регулярные рейсы в цунамигенных регионах, с возможностью их взаимодействия с навигационными спутниковыми аппаратами (ГЛОНАСС или GPS) и с водной поверхностью цунамигенных регионов (океанов), при этом для определения параметров волнения при измерении высоты от летательного аппарата до водной поверхности вычисляют геодезические координаты летательного аппарата (ϕо, λо, Hо) со смещением, обусловленным наклоном отражающей водной поверхности (океанов) относительно референц-эллипсоида по формуле
(ϕо, λо, Hо) = (ϕг, λг, -Hг), (1)
где ϕо, λо, Hо – широта, долгота и высота летательного аппарата, φг, λг, -Hг – геодезические координаты соответственно; по вычисленным геодезическим координатам определяют наклон водной поверхности (океанов) по широте и долготе по формулам
ΔЦϕ = ΔSϕ /2Н = Δϕ М /2Н, (2)
ΔЦλ = ΔSλ /2Н = ΔλN /2Н, (3)
где ΔЦϕ, ΔЦλ – наклон водной поверхности (океанов) по широте и долготе, M, N – радиусы кривизны нормального сечения и меридиана референц – эллипсоида; Δϕ, Δλ – разности геодезических координат по данным устройств определения параметров волнения, при этом исключают ионосферную погрешность путем обработки спутниковой навигационной информации методом PrecisePointPosition, в свою очередь, на наземных станциях приема и обработки сейсмических сигналов службы предупреждения о цунами по измеренным параметрам выполняют моделирование колебаний уровня водной поверхности океана, вызываемых атмосферными возмущениями с выделением сигнала цунами на шельфе с учетом неоднородной береговой линии и в открытом океане на фоне естественного длинноволнового шума с выделением длинных волн, для которых возникает эффект резонансного отражения, включая уединенные волны в форме холмов с периодом колебаний от 15 до 60 мин, при этом прогноз возникновения волны цунами составляют по двум выделенным уединенным волнам в форме холмов, следующих друг за другом с периодом колебаний от 15 до 60 мин и значениям наклона (ΔЦϕ, ΔЦλ) выше 4-5 угл.сек, при этом, если значения указанных величин наклонов повторяются в течение 2 – 3-х циклов, то такая волна определяется как волна цунами.
2. Способ по п .1, отличающийся тем, что в нем использован комплекс, содержащий наземную станцию приема и обработки сейсмических сигналов службы предупреждения о цунами, включающую: средства обработки сейсмической информации, выполненные в виде автоматизированных рабочих мест на основе быстродействующих ЭВМ, соединенных информационными линиями связи с устройствами регистрации сейсмической информации, размещенными в ионосфере, атмосфере, литосфере и гидросфере, как на подвижных носителях, так и стационарно, дополнительно содержит модуль обработки сейсмической и гидрометеорологической информации, включающий блок выделения уединенных волн в форме холмов с периодом колебаний от 15 до 60 мин и определения наклона выделенных волн, спутниковый канал связи с приемниками навигационной аппаратуры потребителей (НАП) и радиовысотомерами, установленными на летательных аппаратах, выполняющих регулярные рейсы в цунамигенных регионах, при этом приемники НАП снабжены двумя антеннами, одна из которых ориентирована в сторону навигационных спутниковых аппаратов (по оси Зенита), а вторая – в сторону водной поверхности океанов ( по оси Надира).
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПАСНОСТИ ЦУНАМИ | 2004 |
|
RU2260819C1 |
| RU 2066468 C1, 10.09.1996 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| JP 2002117475 A, 19.04.2002. | |||

