Изобретение относится к области мониторинга поверхностных гравитационных волн и преимущественно может быть использовано для обнаружения волн цунами в открытом океане в области прогнозируемого подводного землетрясения.
Известна система наблюдения сейсмических морских волн с использованием GPS приемников по патенту JP № 2009229432. В состав системы входят GPS приемники, которые снабжены функцией плавучести. Приемники размещаются как на поверхности моря, так и могут погружаться на определенную глубину. Суть способа состоит в измерении горизонтального смещения GPS приемников по информации об их местоположении. Считается, что сейсмические морские волны в каждой точке наблюдения обладают уникальными особенностями, которые являются демаскирующими признаками волны.
Недостатком известной системы являются высокие требования к точности определения координат GPS приемника, которые могут быть не обеспечены навигационной системой над открытым океаном. Действительно, известно, что скорость горизонтального движения воды по сравнению с фазовой скоростью движения волны меньше во столько раз, во сколько раз глубина океана больше высоты волны. Например, если средняя глубина океана 4000 м, а средняя высота волны 1 м, тогда их отношение будет равно 4000, а значит горизонтальная скорость движения воды будет в 4000 раз меньше фазовой скорости движения волны. Если фазовая скорость волны в открытом океане равна 720 км/ч или 200 м/с, то горизонтальная скорость воды будет равна 0.05 м/с или 5 см/с. Примерно те же значения скорости получаются с применением формулы для вычисления максимальной скорости течений для приливной волны [1, с.174]
 м/с, где h - амплитуда волны, H - глубина моря в данной точке.
м/с, где h - амплитуда волны, H - глубина моря в данной точке.
Для примера  .
.
Для определении сантиметровых смещений точность определения координат приеника GPS должна иметь величину единиц сантиметров. Если среднеквадратическая ошибка (σ) определения координат приемника будет равна 10 м, то для достоверного определения смещения (выхода за пределы 6σ) необходимо время
τ=6×10/0,05=1200 с.
За 1200 с гребень волны уйдет от точки идеального обнаружения на расстояние
1200×200 м/с = 240000 м = 240 км,
что приведет к недопустимому запаздыванию и неэффективности системы.
Таким образом, использование координат GPS приемника в качестве информационного параметра, идентифицирующего волну цунами, связано с обеспечением высокой точности навигационной системы, которая в открытом океане может быть недостижима.
Известна буйковая станция DART [2 стр.262], состоящая из заякоренного поверхностного буя и донной платформы, обмен информацией между которыми ведется по акустическому каналу связи. Основу системы составляют глубоководные датчики давления. Датчик, расположенный на донной платформе, измеряет среднее за 15 с давление с точностью, соответствующей 1 мм водяного столба. Это позволяет надежно выделять цунами высотой в 1 см при глубине океана в месте постановки около 6000 м. Поверхностный буй оборудован спутниковой системой передачи данных (GOES) в центры предупреждения о цунами. Достоинством станции является высокая точность и стабильность, а размещение датчика давления на большой глубине позволяет отфильтровать ветровые волны, поскольку известно, что вариации давления, связанные с поверхностными волнами, ощутимы на дне только в случае длинных волн (волн цунами) [2, стр.260]. К недостаткам станции относится жесткая привязка к месту. Измерения производятся в области, не связанной с областью оперативного прогноза очага генерации цунами. То есть даже абсолютно точный прогноз местоположения очага цунами на местоположение анализируемой установки никак не повлияет в силу ее стационарности. Удаленность станции от очага приводит к сокращению заблаговременности оповещения (чем ближе к очагу, тем раньше пройдет оповещение, с одной стороны, чем ближе к очагу, тем точнее определяются параметры деформации дна океана - с другой стороны).
В отличие от американских станций японские глубоководные станции [2, стр.262] агентства JAMSTEK не используют спутниковый канал связи, а соединены с побережьем кабельными линиями, что приводит к жесткой привязке станций к побережью и, как следствие, к сокращению времени заблаговременности предупреждения о цунами по сравнению со случаем выноса датчиков в открытый океан ближе к очагу генерации цунами.
Наиболее близким по технической сущности к предлагаемому изобретению является станция DART.
Целью изобретения является повышение оперативности оповещения о волне цунами посредством приближения средства измерений к прогнозируемому очагу генерации цунами.
Поставленная цель достигается посредством наделения станции свойством мобильности.
Для этого платформу с размещенным на ней датчиком давления (датчиком цунами) наделяют функцией плавучести с возможностью удерживать заданный подводный горизонт посредством скрепленных с платформой емкостей, соединенных шлангами с баллоном со сжатым газом и водяным насосом, на платформе размещают блок управления и блок обработки сигналов датчика цунами, а также буй, содержащий приемник навигационных сигналов и передатчик информации по спутниковому каналу связи, причем буй связывают с платформой кабелем-сцепкой и снабжают автономной системой погружения и всплытия.
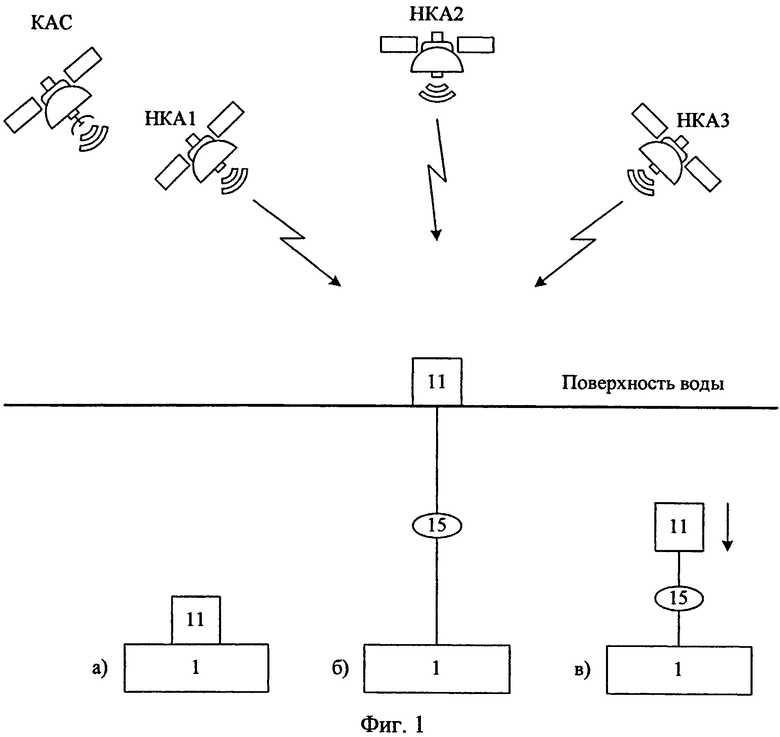
На фиг.1 показано устройство в трех положениях: а) при производстве измерений; б) при передаче сигнала обнаружения волны цунами; в) при переходе в исходное состояние для производства измерений. На фиг.2 показана обобщенная схема, поясняющая работу устройства.
Устройство содержит платформу 1 с прикрепленными к ней емкостями 2, соединенными шлангами 3 и 4 с баллоном со сжатым газом 5 и водяным насосом 6, датчик давления (датчик цунами) 7, блок управления 8, блок питания 9, блок обработки сигналов датчика цунами 10 и буй 11 с автономной системой погружения и всплытия 12, причем буй содержит приемник навигационных сигналов 13, передатчик информации 14 через КА и связан с платформой кабель-сцепкой 15.
Устройство работает следующим образом.
1. Доставка устройства в область прогнозируемого подводного землетрясения.
Устройство доставляется (кораблем, самолетом) в заданную область океана - область прогнозируемого очага землетрясения и погружается на глубину, превышающую глубину влияния ветровых волн (например, для океана - 50 м [3]).
2. Установка на заданный подводный горизонт.
Изначально устройство тяжелее воды и происходит его погружение. При этом сигнал с выхода датчика давления 7 (датчика цунами) поступает на вход блока обработки 10, где происходит фильтрация ветровых волн. С выхода блока обработки 10 сигнал, пропорциональный глубине погружения, поступает на вход блока управления 8, в котором происходит сравнение с пороговым значением сигнала, соответствующим заданной глубине погружения платформы 1. При превышении величины сигнала порогового значения в блоке управления 8 формируются команды, которые с его соответствующих выходов подаются на исполнительные механизмы баллона 5 и насоса 6. Посредством включения и выключения крана, а также включения и выключения насоса происходит гашение автоколебаний платформы 1, и она занимает стабильное положение на заданном уровне, которое в дальнейшем отслеживается с учетом ветрового волнения.
3. Всплытие для передачи сигнала через спутниковый канал связи.
После установки платформы 1 с аппаратурой на заданный подводный горизонт устройство переходит в режим обнаружения волны цунами. Задача обнаружения волны цунами возлагается на блок обработки 10 с использованием алгоритмов станции DART. Сигнал, идентифицирующий волну цунами, поступает на вход блока управления 8. По этому сигналу в блоке управления 8 формируется команда на включение механизма «облегчения» буя 11 с помощью автономной системы погружения и всплытия 12. Буй 11 всплывает, поднимая на поверхность приемник 13 и передатчик 14, находящиеся на нем. При этом кабель-сцепка 15 буя 11 с платформой 1 распускается.
4. Передача сигнала через КА связи.
При выходе буя 11 на поверхность формируется сигнал «выход на поверхность», по которому включаются приемник 13 и передатчик 14, происходит их настройка на навигационные аппараты и спутник связи, после которой происходит передача сохраненного в блоке обработки сигнала цунами и определенных с помощью навигационной системы координат приемника через спутник связи в центр цунами. Таким образом, с запаздыванием на время подъема буя с глубины 50 м, определения координат антенны приемника и передачи информации через спутник в центре цунами становятся известными координаты и параметры волны цунами на момент ее обнаружения.
5. Погружение буя.
После передачи сигнала цунами и координат навигационного приемника по спутниковой связи в блоке управления 8 формируется команда на погружение буя 11, которая поступает на автономный механизм погружения и всплытия буя и на кабель-сцепку 15. Буй 11 «утяжеляется», а механизм скручивания гибкой кабель-сцепки подтягивает буй 11 на отведенное на платформе место. При этом платформа 1 испытывает колебания уровня, которые компенсируются механизмом выставления платформы 1 на заданный уровень. После успокоения платформы 1 устройство переходит в режим обнаружения волны цунами.
6. Завершение дежурства
Цикл обнаружение - передача повторяется, пока не исчерпается энергетический ресурс (блок питания 9) устройства. После исчерпания энергоресурса устройство передает сигнал «тревоги» и свои координаты. Далее устройство снимается с «дежурства», всплывает, заряжается и при необходимости опять ставится на «дежурство».
Дополнительный положительный эффект устройства заключается в том, что в режиме дежурства устройство перемещается вместе с океаническим течением и, таким образом, осуществляется мониторинг волн цунами не в точке (точку спрогнозировать невозможно), а в области прогноза подводного землетрясения.
Источники информации
1. Шулейкин В.В. Физика моря. 1953 г.
2. Левин Б.В., Носов М.А. Физика цунами и родственных явлений в океане. - М.: Янус-К, 2005 г.
3. Куликов Е.А. Физика цунами. - журнал «Физика», №11, 2005, издательского дома «Первое сентября».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения опасности цунами | 2020 |
|
RU2738589C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПАСНОСТИ ЦУНАМИ | 2020 |
|
RU2735952C1 |
| СПОСОБ СЕЙСМИЧЕСКОГО МИКРОРАЙОНИРОВАНИЯ | 2010 |
|
RU2436125C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2013 |
|
RU2546784C2 |
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ ПРИ НАХОЖДЕНИИ ПОДВОДНОГО ОБЪЕКТА НА ГОРИЗОНТЕ ПЛАВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ ГИДРОАКУСТИЧЕСКОГО КАНАЛА ПЕРЕДАЧИ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2008 |
|
RU2398316C2 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2011 |
|
RU2468395C1 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА | 2010 |
|
RU2436134C1 |
| Способ обнаружения возможности наступления цунами | 2020 |
|
RU2748132C1 |
| БУЙКОВАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ДЛЯ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКОВ СИЛЬНЫХ ЗЕМЛЕТРЯСЕНИЙ И ЦУНАМИ | 2008 |
|
RU2410725C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2011 |
|
RU2457514C1 |
Изобретение относится к плавучим средствам и может быть использовано для обнаружения волн цунами в открытом океане. Сущность: устройство содержит платформу (1) с установленным на ней буем (11). Платформу (1) наделяют функцией плавучести и возможностью удерживать заданный подводный горизонт посредством скрепленных с ней емкостей (2), соединенных шлангами (3, 4) с баллоном (5) со сжатым газом и водяным насосом (6). На платформе (1) размещают датчик (7) давления (то есть датчик цунами), блок (8) управления, блок (9) питания и блок (10) обработки сигналов датчика (7) давления. Буй (11) связывают с платформой (1) кабель-сцепкой (15). Буй (11) снабжают автономной системой (12) погружения и всплытия, приемником (13) навигационных сигналов, а также передатчиком (14) информации по спутниковому каналу связи. Технический результат: повышение оперативности оповещения о волне цунами посредством приближения средства измерений к прогнозируемому очагу землетрясения. 2 ил.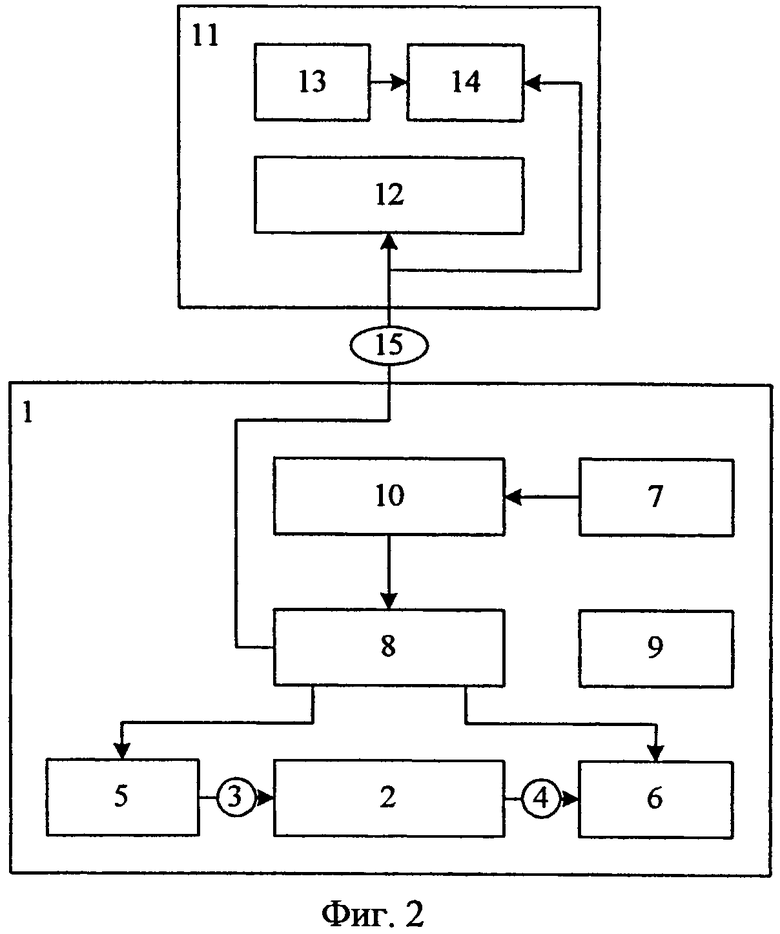
Индикатор-сигнализатор волн цунами в открытом океане, содержащий платформу с размещенными на ней датчиком давления и блоком питания, а также буй с приемником навигационных сигналов и передатчиком информации по спутниковому каналу связи, отличающийся тем, что с целью повышения оперативности оповещения о волне цунами посредством приближения средства измерений к прогнозируемому очагу землетрясения платформу наделяют функцией плавучести с возможностью удерживать заданный подводный горизонт посредством скрепленных с платформой емкостей, соединенных шлангами с баллоном со сжатым газом и водяным насосом, на платформе размещают блок управления и блок обработки сигналов датчика цунами, причем буй устанавливают на платформе, связывают с платформой кабель-сцепкой и снабжают автономной системой погружения и всплытия.
| JP 2009143331 A, 02.07.2009 | |||
| JPH 11281758 A, 15.10.1999 | |||
| US 2006195263 A1, 31.08.2006 | |||
| ДРЕЙФУЮЩАЯ БУЙКОВАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ДЛЯ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКОВ СИЛЬНЫХ ЗЕМЛЕТРЯСЕНИЙ И ЦУНАМИ | 2008 |
|
RU2405176C2 |

