Изобретение относится к области измерений, а более конкретно к способам оперативного мониторинга за состоянием окружающей обстановки по измеренным физическим параметрам.
Известен способ измерения физических полей [1], включающий пропускание через контролируемую зону зондирующих сигналов, которые затем подвергаются обработке, включающей томографическое восстановление распределения параметров физического поля в пределах контролируемой зоны, в котором зондирующие сигналы пропускают через измерительные каналы, которые предварительно формируют в контролируемой зоне, при этом в качестве зондирующих сигналов используют когерентное световое излучение, при этом из светодиодов формируют основную и дополнительную измерительные сети, для чего световоды основной измерительной сети размещают по меньшей мере по двум направлениям предпочтительно таким образом, чтобы каждый светодиод одного направления пересекал все светодиоды другого направления.
Данный способ имеет ограниченное применение, так как его эффективность обусловлена выполнением условия, заключающегося в том, что каждый световод одного направления должен пересекать все светодиоды другого направления. Выполнение данного условия возможно только при жесткой привязке световодов, что может быть обеспечено только в условиях земной поверхности
Известен также способ оперативного исследования атмосферы, земной поверхности и океана [2], включающий транспортировку к области исследования по баллистической или орбитальной траектории диагностического модуля, отделение от него за границами атмосферы спускаемых капсул, снабженных радиозондами, доставку спускаемых капсул к исследуемой области, измерение с помощью радиозондов во время их спуска и после приземления или приводнения параметров атмосферы, земной поверхности и океана, передачу информации от радиозондов на пункты приема, в котором от диагностического модуля отделяют комплект спускаемых капсул, количество капсул в котором удовлетворяет условию заполнения всей исследуемой области, после истечения заданного временного интервала осуществляют разведение спускаемых капсул, обеспечивая заданное распределение их в пространстве и доставку их к верхней границе исследуемой области, при этом от диагностического модуля последовательно с заданными временными интервалами отделяют несколько комплектов спускаемых капсул.
Данный способ по сравнению с известным способом [1] позволяет производить оперативное исследование с приемлемой степенью точности, получение исходной информации за счет того, что он включает транспортировку к области исследования диагностического модуля, отделение от него спускаемых капсул, снабженных радиозондами, измерение физических параметров и передачу их на пункты приема, при этом от диагностического модуля отделяют комплект спускаемых капсул, количество которых удовлетворяет условию заполнения всей исследуемой области с обеспечением заданного их распределения в пространстве.
Однако при использовании данного способа для оперативного исследования океана при воздействии взволнованной водной поверхности происходит нарушение заданного распределения капсул. Данный фактор особенно негативно сказывается при проведении исследований, связанных с обеспечением высокоточного координирования при спуске капсул и при их дрейфе после приводнения в океане.
Известные способы мониторинга за состоянием окружающей обстановки по измеренным физическим параметрам включают доставку измерительной аппаратуры в исследуемый район, ее размещение, измерение физических параметров, характеризующих окружающую обстановку, передачу информации об измеренных физических параметрах на приемный пункт для последующей обработки и анализа.
В качестве измерительной аппаратуры используются различные датчики измерения физических величин, устанавливаемые как стационарно в виде световодов [1], буев [3-7], вех [8], так и размещаемых на носителях, преимущественно на летательных аппаратах [9-13].
Известные способы и устройства не в полной мере обеспечивают требования по оперативности выполнения мониторинга состояния окружающей обстановки в конкретно заданном районе, что обусловлено следующими факторами.
Выполнение мониторинга посредством датчиков, устанавливаемых стационарно, позволяет производить мониторинг только в зоне их первоначальной установки.
Выполнение мониторинга посредством измерительных датчиков, установленных на летательных аппаратах, имеющих ограничения по высоте полета, требует получения существенного объема статистических данных для обеспечения необходимой достоверности измеряемых физических параметров [14], что значительно повышает трудоемкость таких работ. Кроме того, использование летательных аппаратов ограничено погодными условиями, что уменьшает степень оперативности исследования конкретных районов.
Наиболее близким по своей технической сущности к заявляемому техническому решению является способ оперативного исследования атмосферы, земной поверхности и океана [2].
Задачей настоящего предложения является повышение точности получения исходной информации об окружающей обстановке по измеренным физическим параметрам при оперативном исследовании конкретно заданного района, преимущественно атмосферы и океана, а также расширение функциональных возможностей устройства, предназначенного для реализации способа оперативного исследования атмосферы, земной поверхности и океана.
Поставленная задача достигается за счет того, что в способе оперативного исследования атмосферы, земной поверхности и океана и устройстве для его осуществления, включающем транспортировку к области исследования диагностического модуля, отделение от него спускаемых капсул, снабженных измерительной аппаратурой, доставку спускаемых капсул к исследуемой области, измерение с помощью измерительной аппаратуры физических параметров атмосферы, земной поверхности и океана, передачу измеренных физических параметров на пункты приема с отделением в заданные временные интервалы от диагностического модуля спускаемых капсул, количество которых удовлетворяет условию заполнения всей исследуемой области с обеспечением заданного распределения в исследуемой области, обеспечение заданного распределения в исследуемой области осуществляется путем определения координат местоположения капсул, сравнения их с заданными координатами, и при превышении заданного отклонения формируют сигнал для перемещения капсулы в заданную точку, а посредством измерительной аппаратуры, имеющей непересекающиеся энергетические спектры, дополнительно определяют горизонтальные составляющие скорости и параметры вертикального движения капсулы с определением высоты и периода волн 3% обеспеченности с включением этих параметров в состав информационного сообщения, передаваемого на пункты приема через искусственный спутник Земли с полосой частот в диапазоне дециметровых волн, а спускаемая капсула, содержащая корпус с измерительной аппаратурой, парашютную систему и информационный блок связи, корпус которой выполнен в форме цилиндра с торцевым сферическим днищем и конической крышкой с плоским днищем и снабжен стабилизаторами, которая еще снабжена движителем, спутниковым навигационно-измерительным модулем, гидроакустическим модулем, информационно связанными между собой.
Обеспечение заданного распределения в исследуемой области путем определения координат местоположения капсул, сравнение этих координат с заданными координатами и при превышение заданного отклонения - формирование сигнала для перемещения капсулы в заданную точку, а измерение физических параметров посредством аппаратуры, имеющей не пересекающие энергетические спектры, позволяет дополнительно определять горизонтальные составляющие скорости и параметры вертикального движения капсулы с определением высоты и периода волн 3% обеспеченности с включением этих параметров в состав информационного сообщения, передаваемого на пункты приема через искусственный спутник Земли с полосой частот в диапазоне дециметровых волн, с выполнением спускаемой капсулы, содержащей корпус с измерительной аппаратурой и парашютную систему, корпус которой выполнен в форме цилиндра с торцевым сферическим днищем и конической крышкой с плоским днищем и снабженной стабилизаторами, движителем, спутниковым навигационно-измерительным модулем, гидроакустическим модулем, информационно связанными между собой, позволяет повысить точность определения исходных физических параметров и расширить функциональные возможности известного способа.
Совокупность новых признаков из известного уровня техники не выявлена, что позволяет сделать вывод о соответствии заявляемого решения условию патентоспособности "изобретательский уровень".
Сущность заявляемого способа заключается в следующем.
К области исследования, например, ограниченной координатами акватории, посредством летательного аппарата транспортируют капсулы, снабженные измерительной аппаратурой. Отделяют от него спускаемые капсулы, которые посредством парашютной системы доставляются в исследуемую область.
При отделении спускаемых капсул запускают измерительную аппаратуру, в частности радиозонд и спутниковый навигационно-измерительный модуль, а после приводнения по радиосигналу с летательного аппарата или в момент отрыва парашюта запускают дополнительную измерительную аппаратуру. Посредством спутникового навигационно-измерительного модуля контролируют траекторию движения спускаемых капсул, а после приводнения уточняют координаты местоположения по гидроакустическому модулю. При отклонении значений координат от заданных формируют сигнал на движитель для перемещения капсулы в точку с заданными координатами. В процессе проведения исследований координаты капсулы контролируются непрерывно. Передача измеряемых параметров на пункты приема осуществляется через искусственные спутники Земли с полосой частот в диапазоне дециметровых волн. При этом измерительная аппаратура имеет непересекающиеся энергетические спектры и обеспечивает измерение горизонтальных составляющих скорости и параметры вертикального движения капсулы с определением высоты и периода волн 3% обеспеченности с включением этих параметров в состав информационного сообщения, передаваемого на пункты приема.
Устройство, посредством которого реализуется заявляемый способ, иллюстрируется чертежами, где на фиг.1 изображена спускаемая капсула, на фиг.2 изображен парашют, на фиг.3 изображена камера парашютной системы, на фиг.4 изображена схема действия парашютной системы, на фиг.5 изображена блок-схема измерительной аппаратуры, на фиг.6 изображена схема блока передачи информации, на фиг.7 изображена схема антенного блока, на фиг.8 изображена блок-схема системного блока, на фиг.9 изображена схема приемоиндикатора, на фиг.10 изображена блок-схема спутникового навигационно-измерительного модуля, на фиг.11 изображена схема узкополосного следящего фильтра, на фиг.12 изображена схема гидроакустического модуля, на фиг.13 изображена блок-схема измерения составляющих скорости относительного дна, на фиг.14 изображена блок-схема циклического скоростемера.
Спускаемая капсула (фиг.1) представляет собой корпус 1 цилиндрической формы с торцевым сферическим днищем 2 и конической крышкой 3 с плоским днищем и стабилизаторами 4.
Оболочные элементы корпуса 1 выполнены из алюминиевого сплава АМГ-6, обладающего удовлетворительной коррозийной стойкостью и высокими прочностными характеристиками.
Парашютная система спускаемой капсулы состоит из парашюта (фиг.2) и парашютной камеры (фиг.3).
Парашют состоит из купола 5, стабилизирующего кольца 6, строп 7, удлинительного звена 8, выполненного как продолжение строп 7, состроченных вместе с тремя коушами 9 на конце, резака 10 и шнура рифления 11.
Парашютная камера состоит из основы камеры 12, кармана 13, ленты 14, металлического кольца 15, нижних петель 16, шнура 17.
Парашютная система и спускаемая капсула размещаются в парашютном контейнере. При сбрасывании капсулы с летательного аппарата (фиг.4) отделение от носителя и ввод в действие осуществляется принудительно с помощью вытяжного звена 18, которое металлическим кольцом крепится на летательном аппарате, а другим концом крепится к уздечке купола парашюта 19. Вытяжное звено 18 полностью выходит из кармана 13 камеры 20, раскрывает камеру и, вытянув парашют 21, обрывается по разрывной ленте 14. При этом выдергиваются боевые чеки резаков 10 и они приводятся в действие.
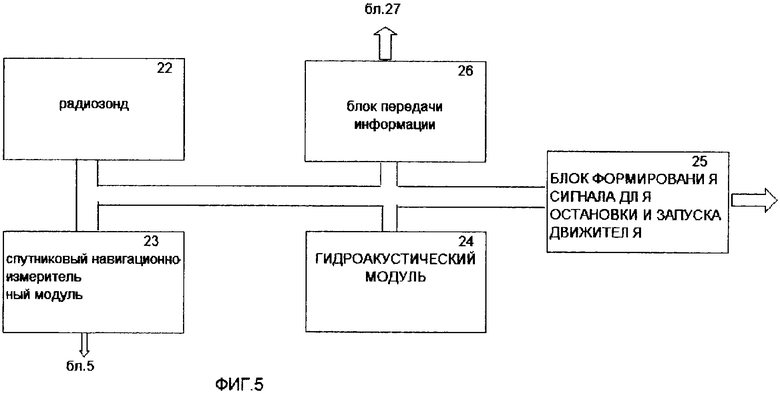
Аппаратура, размещаемая в спускаемой капсуле включает (фиг.5) радиозонд 22, спутниковый навигационно-измерительный модуль 23, гидроакустический модуль 24, блок формирования сигнала для запуска и остановки движителя 25, блок передачи информации 26.
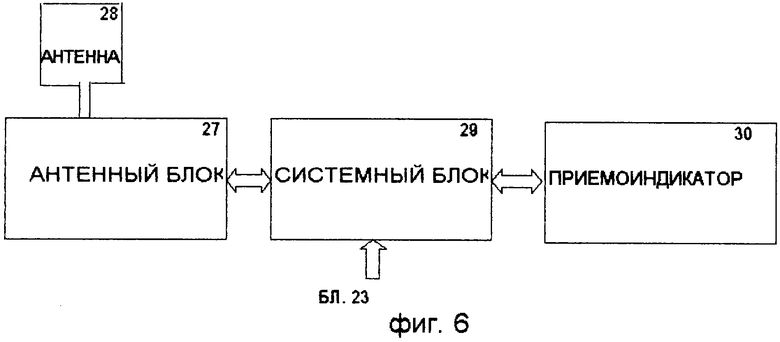
Блок передачи информации 26 включает (фиг.6) антенный блок 27, устанавливаемый на капсуле в местах прямой видимости искусственного спутника Земли, содержащий морскую ненаправленную антенну 28 спирального типа с антенным кабелем и комплектом для установки антенны, системный блок 29 и приемоиндикатор GPS 30, устанавливаемые в объеме капсулы.
Антенна 28 не требует применения систем ориентации и стабилизации по направлению на искусственный спутник Земли и может работать на прием и передачу при сильной качке капсулы.
Передача данных производится по специально выделенным каналам на компьютерные терминалы приемных пунктов со скоростью 600 бит/с через искусственный спутник Земли.
Обмен данными осуществляется в режиме коммутации сообщений с промежуточным хранением информации.
Передача информации со спутников на приемные пункты осуществляется в полосе частот диапазона дециметровых волн, что позволяет уменьшить потери при распространении радиоволн и разместить на капсуле типы антенн, не требующих системы наведения и пространственной стабилизации.
В качестве антенны 28 использована резонансная спиральная антенна, имеющая высоту 440 мм, диаметр 136 мм и массу 0,5 кг. Ширина диаграммы направленности антенны 28 в вертикальной плоскости составляет не менее 150 градусов, а в горизонтальной плоскости - 360 градусов при коэффициенте эллиптичности 0,8 и коэффициенте усиления не менее 1 дБ.
Для обеспечения надежного функционирования устройства на взволнованной морской поверхности в условиях затенения, заныривания и заливания при жестких ограничениях на энергетику радиолинии применен соответствующий алгоритм передачи информации, который заключается в следующем.
Сообщение объемом до 1532 бит, предназначенное для передачи, первоначально разбивается на блоки по 100 бит. Затем сформированные блоки за счет избыточного помехоустойчивого кодирования увеличиваются до 140 бит.
Излучаемый сигнал с блока 26 с модуляцией и скоростью 1200 бит/с принимается приемной антенной спутника, где приемный тракт с регенерацией сигнала на борту фильтрует и демодулирует принятый сигнал, с прямой ретрансляцией переносит сигнал без изменения его структуры на соответствующую частоту передачи. При этом на выходе бортового демодулятора с вероятностью ошибки не более 10-2 на бит восстанавливается цифровая последовательность сообщения, передаваемого блоком 26. Затем сигнал излучается в направлении приемного пункта. Принятый и выделенный канальным приемником приемного пункта сигнал подается на вход канального декодера, на выходе которого вероятность ошибки уменьшается до значения 10-5, на блок, в котором находится 100 информационных бит.
Восстановленные декодером блоки поступают на устройство восстановления и вывода сообщений, которое осуществляет накопление, восстановление и мажоритарную поблочную обработку принятых сигналов. После поблочного декодирования производится запись восстановленного сообщения в оконечное запоминающее устройство. После этого сообщение готово для дальнейшей обработки.
Блок 26 осуществляет передачу независимо от наличия в данный момент в зоне видимости спутника и может передавать до 32 результатов измерений различных величин. Длительность одного сообщения не более 1 с. Интервалы между моментами передачи 40-60 с или 100-200 с. Передаваемое сообщение содержит опознавательный номер капсулы и значение отсчета данных. Передаваемое с блока 26 сообщение принимается на борту спутника, при этом для каждого принятого сообщения фиксируется время приема и измеряется доплеровский сдвиг частоты. Кроме того, на борту спутника производится демодуляция принятой информации от капсулы. Далее информация приводится к определенному виду (кадру) и храниться на борту спутника до момента ее сброса на один из приемных пунктов. Информация считывается из памяти спутника при каждом пролете над одним из приемных пунктов, где рассчитываются координаты капсул и обрабатываются измеренные измерительной аппаратурой физические параметры.
Разделение сообщений от различных капсул достигается во времени за счет отсутствия синхронизации моментов начала излучения от блоков 26 различных капсул и за счет различных периодов повторения, а по частоте за счет различного сдвига несущей частоты различных капсул, вызванного доплеровским эффектом.
Дальность передачи данных в режиме реального времени до 5 тыс.км, а дальность передачи данных по всем районам Мирового океана с задержкой до 3 часов не ограничена.
Информативность бортовой спутниковой системы составляет за период 12 часов, прием и передача информации от 16 000 капсул. В зоне одновременного приема - до 920 капсул. Определение координат - до 4000 за сутки. Период повторения сеансов связи составляет 40-200 с, а скорость передачи информации составляет 400 бит/с.
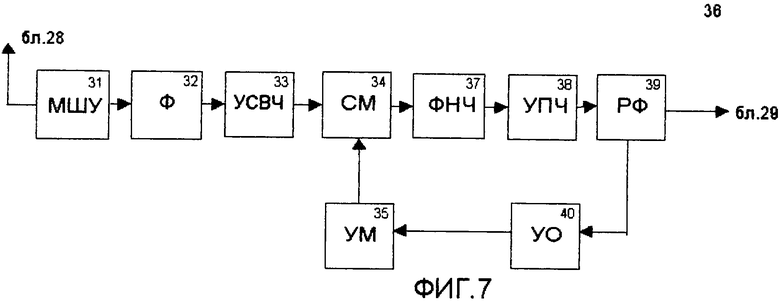
Антенна 28 установлена на верхней крышке антенного блока 27, представляющего собой блок сверхвысокой частоты, состоящий из корпуса и плат, которые установлены внутри корпуса. Блок содержит (фиг.7) малошумящий усилитель 31, фильтр 32, усилитель сверхвысотной частоты 33, смеситель 34, умножитель 35 и плату усиления промежуточной частоты 36, состоящую из входного фильтра низкой частоты 37, усилителя промежуточной частоты 38, разделительного фильтра 39 и усилителя-ограничителя 40.
Малошумящий усилитель 31 выполнен двухкаскадным на транзисторах 2Т313А-2, каждый каскад которого обеспечивает усиление сигнала в диапазоне частот 1570-1620 МГц до 10 дБ.
Фильтр 32 выполнен в микрополосковом исполнении и состоит из пяти резисторов. Для подстройки амплитудно-частотных характеристик предусмотрены две подстроечные пластины из поликора толщиной 1 мм, положение которых подбирается при регулировке фильтра.
Усилитель сверхвысокой частоты 33 выполнен по балансной схеме на четырех транзисторах 2Т313А1-2. Общее усиление УСВЧ составляет 20 дБ в диапазоне 1570-1620 МГц.
Смеситель 34 выполнен на базе СВЧ микросборки М43209 и обеспечивает преобразование сигналов в диапазоне частот 1570-1620 МГц в сигналы промежуточной частоты в диапазоне 15-65 МГц при частоте гетеродина 1555 МГц, поступающей с платы умножителя 35, который выполнен на четырех транзисторах 2Т3132А-2. Первый и второй транзисторы обеспечивают усиление и ограничение сигнала 311 МГц. Четвертый транзистор работает в режиме отсечки тока и усиливает все гармоники, полученные на третьем транзисторе. Выделение пятой гармоники с частотой 1555 МГц обеспечивает трехрезонаторный микрополосковый фильтр, расположенный на той же плате, что и транзисторы.
Входной фильтр низкой частоты 37 выполнен на трех конденсаторах и двух катушках индуктивности и имеет частоту среза 70 МГц. Усилитель промежуточной частоты 38 выполнен трехкаскадным на шести транзисторах по двухконтактной схеме. Усилитель-ограничитель 40 выполнен на транзисторе, а разделительный фильтр 39 выполнен на катушке индуктивности, конденсаторе и резисторе.
Антенный блок 27 при приеме сигнала работает следующим образом. Сигнал навигационного космического аппарата в полосе частот 1570-1620 МГц, принятый антенной, через выходной объем антенны поступает на входной блок сверхвысокой частоты на малошумящий усилитель 31, который обеспечивает усиление сигнала до 20 дБ при коэффициенте шума не более 4 дБ. Усиленный сигнал подается на вход фильтра 32, который имеет полосу пропускания не более 20 дБ. Параметрами фильтра 32 определяются амплитудно-частотные характеристики высокочастотного тракта. С выхода фильтра 32 сигнал подается на вход усилителя сверхвысокой частоты 33, который обеспечивает усиление сигнала до 20 дБ. С выхода блока 33 сигнал поступает на смеситель 34, где происходит его преобразование в полосу частот 15-65 МГц. На вход гетеродина смесителя 34 поступает частота 1553 МГц с выхода умножителя 35. В режиме преобразования смеситель 34 имеет коэффициент передачи минус 9 дБ.
С выхода смесителя 34 сигнал поступает на плату усилителя промежуточной частоты 36, где происходит фильтрация и усиление сигнала на 35 дБ. Для развязки по питанию, опорной частоте и сигналу на плате 36 установлен разделительный фильтр 39, который обеспечивает выделение опорной частоты 311 МГц, которая затем передается на усилитель-ограничитель 40, который переходит в режим ограничения при входном уровне гетеродина на входе блока сверхвысокой частоты более 250 мВ и обеспечивает нормальную работу антенного блока 27 при коротком фидере между антенным блоком 27 и приемоиндикатором 30.
С выхода усилителя 40 платы усилителя промежуточной частоты 36 частота 311 МГц поступает на умножитель частоты 35, который производит усиление частоты 311 МГц до необходимого уровня, ограничивает его и выделяет пятую гармонику, равную 1555 МГц.
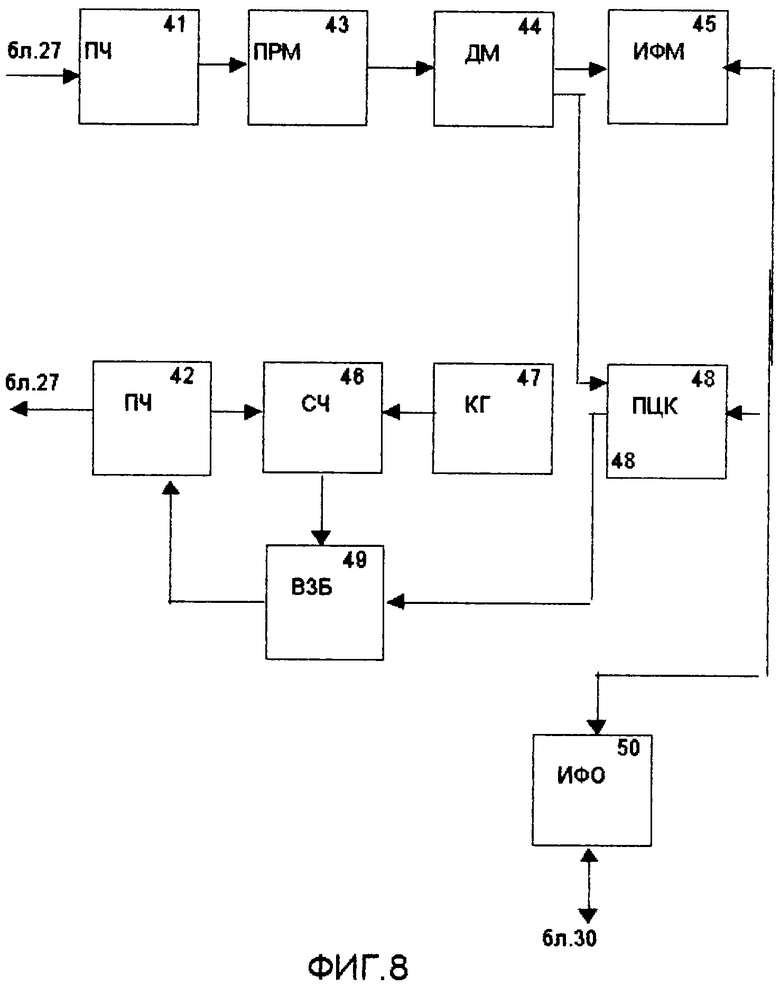
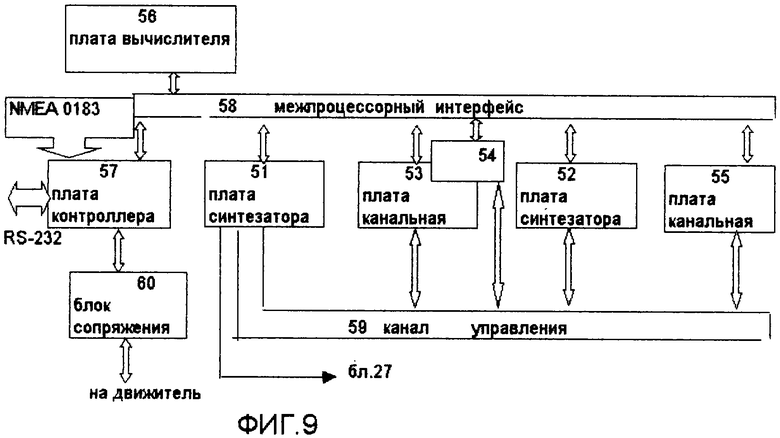
Системный блок 29 (фиг.8) состоит из преобразователя частоты приемного тракта 41, 42, приемника 43, блока демодуляторов 44, интерфейса модема 45, синтезатора частот 46, кварцевого генератора 47, преобразователя цифра - код 48, возбудителя передатчика 49, интерфейса оконечных устройств 50. Приемоиндикатор 30 (фиг.9) состоит из двух плат синтезаторов 51, 52, трех плат канальных 53, 54 и 55, платы вычислителя 56, платы контролера 57, междупроцессорного интерфейса 58, канала управления 59, блока сопряжения 60.
Платы синтезаторов 51 и 52 предназначены для формирования опорных гетеродинных частот высокой стабильности, усиления сигнала промежуточной частоты, формирования отсчетов псевдодальностей, формирования шины управления платами канальными, слежения за сигналом, изменяющимся в пределах доплеровскнх сдвигов частот от 5,0 до минус 5,0 кГц, обработки информации сигнала навигационного космического аппарата на протяжении всего интервала слежения, формирования метки системного времени.
Платы канальные 53, 54, 55 предназначены для свертки сигнала, поступающего с синтезатора, псевдослучайной последовательности конкретного навигационного космического аппарата, преобразования сигнала и получения второй промежуточной частоты 420 кГц, содержащей информацию о доплеровском сдвиге, усиления этой частоты, оцифровки значения доплеровского сдвига частоты, выделения эфемерической информации выработки сигналов для получения псевдодальностей.
Плата вычислителя 56 предназначена для приема, хранения и преобразования информации, поступающей с плат синтезаторов 51, 52 и плат канальных 53, 54, 55, решения задачи определения координат места, счисления и скорости.
Плата контролера 57 предназначена для управления приемоиндикатором для обмена информацией этих устройств с процессором, для формирования последовательного канала по NMEA 0183, а также для ведения календаря.
Блок сопряжения 60 предназначен для приема и обработки информации, поступающей от радиозонда и гидроакустического модуля выдачи этой информации по каналу NMEA 0183 на приемоиндикатор 30, и трансляции сигналов на движитель. Электрическая связь с движителем осуществляется через вращающиеся трансформаторы типа ВТ-5 и сельсины. Блок также содержит аналого-цифровой преобразователь и сетевой адаптер.
В целом приемоиндикатор 30 работает следующим образом. После запуска аппаратуры в приемоиндикатор вводят исходные данные (широта, долгота, высота антенны над уровнем моря, скорость и курс от гидроакустического модуля) и выполняют программу поиска навигационного космического аппарата, при этом если в оперативно-запоминающем устройстве приемоиндикатора 30 есть сохраненный альманах о навигационном космическом аппарате, то поиск и наведение производится только на навигационный космический аппарат, находящийся в зоне видимости. При отсутствии альманаха процессор приемоиндикатора 30 через платы синтезаторов записывает в каждый канал, канальных плат, номера навигационных космических аппаратов системы "NAVSTAR", a также цифровой код литерной частоты навигационных космических аппаратов системы "Глонасс" и разрешает поиск навигационного космического аппарата по дальности. Принятый антенный сигнал навигационного космического аппарата в диапазоне частот 1570-1620 МГц усиливается и преобразуется в сигнал промежуточной частоты в полосе 15-65 МГц. Сигнал промежуточной частоты с антенного блока 27 поступает на плату синтезатора системы "NAVSTAR" и подается на платы канальные и плату синтезатора системы "Глонасс". С платы синтезатора системы "NAVSTAR" в антенный усилитель подается сигнал первой гетеродинной частоты 311 МГц для получения промежуточной частоты. В канальных платах, в каждом канале, происходит свертка сигнала псевдослучайной последовательности кодом конкретного навигационного космического аппарата, преобразование сигнала промежуточной частоты 420 КГц. Сигнал этой частоты содержит информацию об эфемеридах, а также информацию о доплеровском сдвиге частоты. Для повышения точности отсчетов измерение доплеровского сдвига частоты производится на частоте 3,36 МГц, а эфемеридная информация преобразуется в шестиразрядный код и по каналу межпроцессорного интерфейса передается на плату вычислителя вместе со значением доплеровской частоты. Кроме того, в процессор передаются признаки наличия навигационного космического аппарата на данном канале и признак его захвата, а также информация о рассогласовании шкал времени между бортовым временем навигационного космического аппарата и системным временем приемоиндикатора 30.
Вся информация с канальной платы системы "Глонасс" поступает в процессор с прерыванием, с частотой 20 Гц (500 мс), а с канальной платы системы "NAVSTAR" - с частотой 10 Гц (100 мс), которые являются метками времени и используются для ведения счета времени. Частоты 10 и 20 Гц являются высокостабильными и вырабатываются на плате синтезатора частоты системы "Глонасс" путем деления опорной частоты 1 кГц.
Кроме того, с каждого канала на плату синтезатора системы "NAVSTAR" поступает тактовая частота псевдослучайной последовательности кода и сигнал начала кодовой последовательности - "эпоха" кода. Находящийся на плате синтезатора системы "NAVSTAR" дальномер раз в секунду подключается к каждому каналу и по информации, по тактовой частоте кода и "эпохе" кода производит измерение псевдослучайной дальности до навигационного космического аппарата. Выдача информации в процессор производится по прерываниям с частотой 10 Гц.
Информация, поступающая с плат синтезаторов и канальных плат, накапливается в оперативно запоминающем устройстве 61, находящемся на плате вычислителя 56.
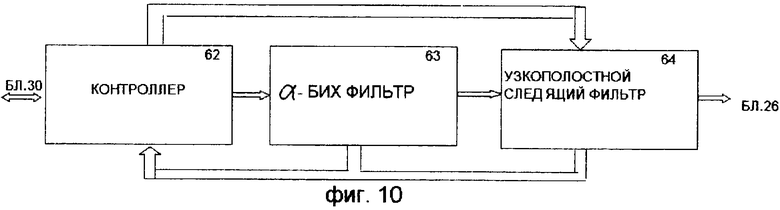
Спутниковый навигационно-измерительный модуль 23 (фиг.10) предназначен для измерения параметров волнения и состоит из контроллера 62, α-БИХ фильтра 63 и узкополосного следящего по частоте фильтра 2-го порядка астатизма 64. Контроллер 62 представляет собой однокристальную ЭВМ и обеспечивает включение питания приемоиндикатора 30 по внутреннему таймеру или внешней команде, сглаживание по времени (на интервале 15 минут) горизонтальных составляющих скорости капсул и передачу этих сглаженных значений в блок информационного сообщения, а также обработку оценок вертикального движения капсулы и передачу результатов (высота волны, ее период) в блок информационного сообщения. Оценка вертикального движения капсулы осуществляется путем совместной обработки текущих значений высоты и вертикальной скорости, вырабатываемых с секундным темпом обновления в соответствии с зависимостью

Для восстановления профиля параметр сглаживания α выбирают ˜0,1-0,2,
где  - обновленная оценка высоты волны;
- обновленная оценка высоты волны;
 - оценка высоты волны на предыдущем шаге;
- оценка высоты волны на предыдущем шаге;
Vhi - измеренное значение вертикальной скорости капсулы в момент ti,
hi - измеренное значение текущей высоты волны в момент ti.
Для восстановления профиля hi вычисляют оценку среднего значения высоты волны на интервале ˜15 минут:
где N - количество измерений.
Оценку среднего квадратического отклонения волнения определяют по формуле
Затем вычисляют оценку высоты волны 3% обеспеченности по формуле h3%=5,28σh.
Восстановленный профиль волнения hi обрабатывают в следящем фильтре 64 с коэффициентом сглаживания α=10-3 при собственной частоте следящего фильтра 64, равной ωо≈2π/6, что позволяет на выходе фильтра 64 получить сглаженную первичную волну, так как все вторичные волны через фильтр 64 не проходят, что позволяет подсчитать число периодов волны на заданном интервале.
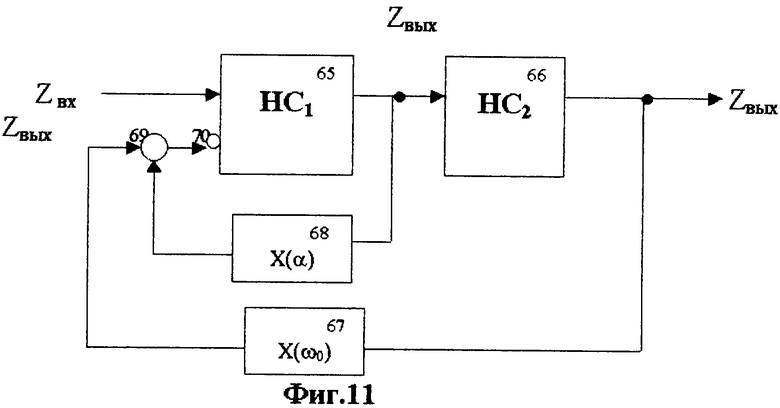
Следящий фильтр 64 (фиг.11) состоит из накапливающих сумматоров 65 и 66, умножителей 67 и 68, блока суммирования 69. Сумматор 65 имеет инверсный вход 70. Применение узкополосного следящего фильтра обусловлено тем, что период морской волны определяется как промежуток времени между прохождением через одну и ту же точку на поверхности моря двух следующих друг за другом гребней волн. При этом в известных устройствах для подавления вторичных колебаний и выделения основного применяют согласованный полосовой фильтр. Однако точное значение выделяемого периода (частоты) основного колебания неизвестно, что снижает достоверность определения периода колебания по измеренным параметрам.
Использование узкополосного следящего фильтра позволяет выделить самую низкочастотную компоненту волнограммы с достаточным подавлением более высокочастотной компоненты, что достигается при выполнении условия α<ωo (где α - параметр затухания; ωo - частота собственных колебаний фильтра).
Выходной сигнал следящего фильтра 64 имеет значения ωo=10 и α=0,6. Поскольку оценка приращения координаты Z формируется в спутниковых приемниках из высокочастотных фазовых измерений с субмиллиметровой точностью, то следящий узкополосной фильтр 64 оптимальным образом сглаживает кодовые измерения фазовыми:

где Ziизм - текущее значение измерения;
α - коэффициент передачи фильтра (α<1);
 - текущая оценка.
- текущая оценка.
Определение высоты волны 3% обеспеченности и периода волн осуществляется в следующей последовательности.
После включения питания приемоиндикатора по внутреннему таймеру (или по внешней команде) эпизодически на 15-20 минут он автоматически осуществляет поиск сигналов спутников, измерения и обработку радионавигационных параметров с выдачей по внешнему интерфейсу типа RS-232 трех координат и трех проекций скорости, привязанных к оцифрованному времени с темпом обновления 1 секунда, включение координат по команде в состав информационного сообщения для передачи по каналу связи, сглаживание по времени (на интервале ˜15 минут) горизонтальных составляющих скорости капсулы и передачу этих сглаженных значений в состав информационного сообщения.
Обработка оценок вертикального движения капсулы и передача результатов (высота волны и ее период) в состав информационного сообщения включает:
1. Сглаживание оценок текущей высоты Hi оценками вертикальной скорости Vнi, полученными от α-БИХ фильтра 63 с α=0,1 с.
2. Вычисление оценки средней квадратической погрешности и высоты волны 3% обеспеченности:
h3%=5,28/nΣHii.
3. Глубокое сглаживание восстановленной волнограммы следящим фильтром 2-го порядка астатизма (ωо=10-3; α=0,6).
4. Подсчет интервала времени ΔТn для целого числа N периодов этих сильно зафильтрованных колебаний (N=20-30) и вычисление периодов волн: T=ΔTn/N.
Совместная обработка вертикальных и горизонтальных перемещений капсулы основана на том, что вариации горизонтальной скорости движения капсулы в направлении распространения волны сильно коррелированны с его вертикальным движением. Эти вариации имеют колебательный характер с периодом, равным периоду волны, но сдвинуты по фазе относительно вертикального движения в силу инерционности капсулы. Силы, возбуждающие горизонтальные колебания капсулы (скатывание и орбитальное движение), пропорциональны вертикальной скорости и ординате профиля волны соответственно (сдвинуты по фазе на 90°).
Приемоиндикатор 30 в штатном режиме вычисляет и выдает три географические координаты и три составляющие скорости: северную VN, восточную VE и вертикальную VH. Северная VN и восточная VE скорости имеют нестационарный тренд, вызванный поверхностным течением и ветром. Вертикальная скорость VH имеет практически нулевое математическое ожидание.
Математическая модель взаимосвязи горизонтальных вариаций скорости капсулы с его вертикальным движением описывается зависимостями:
σVб=σVcк+σVopб,
где σVб - вариация горизонтальной скорости буя;
σVск - составляющая σVб, вызванная скатыванием;
σVорб - составляющая σVб, вызванная орбитальным движением частиц в волне, а без учета вторичных волн
σVcк=K1σVн=a1sin(ωt+ϕ)
σVopб=K2σVн=a2соs(ωt+ψ),
где K1 и К2 - коэффициенты пропорциональности, которые зависят от конструкции капсулы (формы его корпуса, размеров, масса и т.д.). С учетом постоянной времени τз узкополостного следящего фильтра 64, который определяется параметром α=1/τз и выражением для амплитуды волны заданной обеспеченности
 вектор, совпадающий с направлением распространения волн, определяется выражением
вектор, совпадающий с направлением распространения волн, определяется выражением
σVб=Acos(ωt+ϑ).
Так как в приемоиндикаторе 30 вектор, совпадающий с направлением распространения волны, представляется двумя географическими проекциями σVNб и σVEб, то оценки определяются в соответствии с зависимостями


Вариации σVNiизм и σVЕiизм получают из измеренных значений VNiизм и VЕiизм вычитанием текущих оценок их математических ожиданий (нестационарных трендов). Тренд хорошо выделяется 2-3-кратным применением α-БИХ фильтра к измеренным значениям проекций скорости. С учетом динамики этого тренда параметр можно уменьшить до 0,01 (постоянная времени сглаживания τс=100 сек).
Эти вариации сильно зашумлены трехмерным характером волнения (наличием углового распределения энергии в двухмерном спектре волнения), а также шумами приемоиндикатора 30.
Поскольку глубокое сглаживание этих вариаций по времени, устранив шумы приемника, усреднит также угловой спектр волнения (что нежелательно). Поэтому необходимо сглаживать их на интервале времени, равном полупериоду первичной волны. Тогда гистограмма направлений распространения, полученных из таких сглаженных проекций скорости капсулы, отразит угловое распределение склонов этих волн.
Для улучшения оценок направлений А распространения волн на k-том интервале периода использована зависимость Aк=arctg σVЕкб/σVNкб, где σVЕкб и σVNкб соответствуют Dξ=M[ξ(t)], что позволяет использовать корреляцию горизонтальных вариаций скорости с вертикальным движением для весового сглаживания измерений на интервале периода первичной волны. При весовом сглаживании неизвестные коэффициенты пропорциональности, обусловленные массогабаритными характеристиками капсулы, сокращаются, что исключает необходимость их установления


Здесь k=1, 2............n,
где n - количество отсчетов, примерно соответствующее половине периода первичной волны.
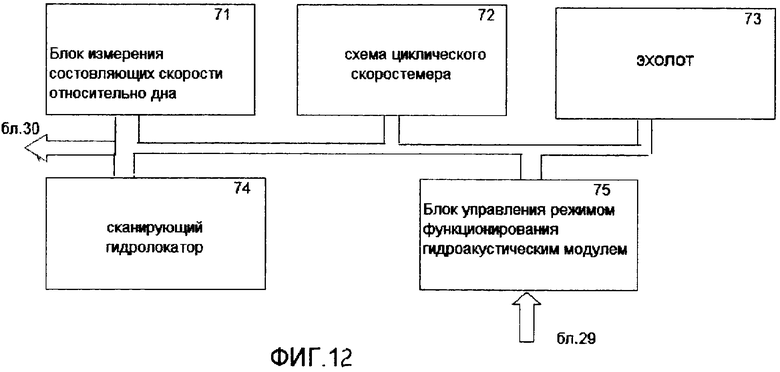
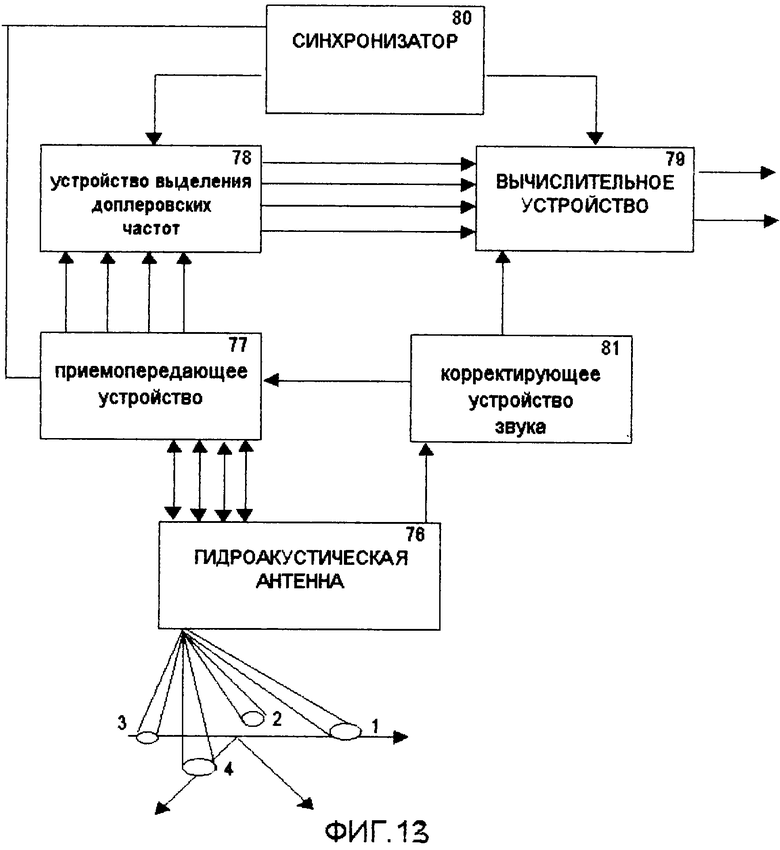
Гидроакустический модуль 24 (фиг.12) состоит из блока измерения составляющих скорости относительно дна 71, схемы циклического скоростемера 72, эхолота 73, сканирующего гидролокатора 74 и блока управления режимом функционирования гидроакустического модуля 75, который информационно связан с приемоиндикатором 30.
Входящие в состав гидроакустического модуля 24 измерительные средства работают в циклическом режиме и в определенной последовательности по управляющим сигналам, поступающим в составе информационных сообщений с искусственного спутника.
Блок измерения составляющих скорости относительно дна 71 (фиг.13) состоит из гидроакустической антенны 76, представляющей собой электроакустические преобразователи, в качестве которых используются пьезокерамические элементы из гитано-бариевых или свинцово-цинково-титановых материалов, представляющие собой плоскую поршневую мембрану, приемопередающего устройства 77.
Гидроакустическая антенна 76 и приемопередающее устройство 77 обеспечивают излучение и прием отраженных от грунта акустических сигналов, распространяющихся по лучам 1-4. Отраженные сигналы Fnp1-Fnp4 с выхода приемопередающего устройства поступают в устройство выделения доплеровских частот 78, где определяются разности частот излученных и принятых колебаний по каждому лучу в вычисленном устройстве 79, доплеровские частоты Fд1-Fд4, пропорциональные соответствующим радиальным скоростям, преобразуются по известным математическим зависимостям в информацию о составляющих скорости Vx (продольная) и Vy (поперечная) в системе координат капсулы. Работой гидроакустического модуля 24 в целом управляет синхронизатор 80 (схема бланкирования). В состав гидроакустического модуля входит корректирующее устройство 81, учитывающее изменения скорости звука в морской воде в соответствии с зависимостью
C=1448,6+4,618t-0,0523t+2,310t+1,25(S-35)-0,11(S-35)t,
где С - скорость звука, м/с;
t - температура морской воды, град С;
S - соленость морской воды, o/оо.
В одном корпусе с гидроакустической антенной размещен термистор (датчик температуры), данные которого автоматически учитываются в вычислительном устройстве 79, а также поступают в состав информационного сообщения. Путем изменения частоты излучения посредством синхронизатора 80 обеспечивается возможность функционирования блока 60 от ревеберационных слоев, позволяет измерять скорость подводных течений на разных уровнях по глубине.
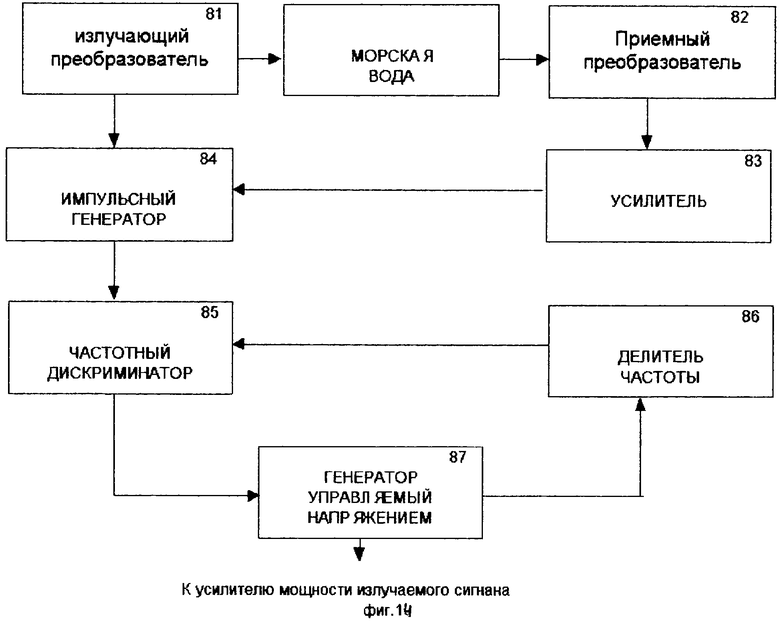
Схема циклического скоростемера 72 (фиг.14) представляет собой замкнутое через воду акустическое кольцо синхронизации, образованное двумя акустическими преобразователями 81 и 82, усилителем 83 и импульсным генератором 84, запускаемым по сигналам с выхода усилителя 83. Частота следования импульсов в подобном кольце пропорциональна скорости звука в воде, что обеспечивает непосредственное измерение скорости звука на горизонте антенны 76 для определения скорости поверхностного течения. В частотном дискриминаторе 85 эта частота следования сравнивается с частотой излученного антенной сигнала, который представляет собой гармонику сигнала в кольце. При изменении скорости звука в воде на выходе дискриминатора 85 появляется управляющее напряжение того или иного знака, изменяющее соответствующим образом частоту излучаемого антенной 76 сигнала. При этом автоматически поддерживается постоянной длина волны излучаемых колебаний посредством делителя частоты 86 и генератора, управляемого напряжением, 87.
Скорость течения Vт определяют как V=L/t±C,
где L - расстояние между излучателем и приемником ультразвука;
t - время прохождения ультразвуком расстояния L;
С - скорость ультразвука в неподвижной жидкости.
В связи с тем, что скорость ультразвука в морской воде зависит от целого ряда факторов (температуры, давления, солености), во избежание погрешностей при измерении скорости течения в гидроакустическом модуле 24 измеряют не время распространения ультразвуковой волны от излучателя до приемника, а разность времен распространения волн, излучаемых по потоку t1=L/C+V и излучаемых против потока t2=L/C-V, а скорость течения определяют как Vt=L(t1-t2)/t1t2, если направление распространения ультразвука совпадает с вектором скорости потока. Если же указанные направления смещены друг относительно друга на некоторый угол θ, то скорость течения определяется из выражения V=L(t1-t2)/t1t2cosθ.
В качестве эхолота 73 может быть использован промерный эхолот типа ПЭЛ, навигационный эхолот типа НЭЛ, аналоги или эхолокатор для распознавания морских грунтов [15].
При использовании эхолокатора или сканирующего гидролокатора обеспечивается возможность определения местоположения капсулы относительно дна с трансляцией этих данных через спутник на диспетчерский пункт для воспроизведения местоположения капсул на электронной картографической навигационной системе. При использовании капсул для исследования земной поверхности гидроакустический модуль содержит геофоны.
В качестве движителя в зависимости от формы капсулы может быть использован движитель типа вертушки (при форме капсулы в виде цилиндра или конуса) или движитель с пластинчатым ротором для капсулы, имеющей форму сфероида. Аналог которого описан в [16] для капсулы, выполненной в виде сфероида.
Реализация заявляемого способа и устройства для его осуществления технической сложности не представляет, так как в качестве основной и дополнительной измерительной аппаратуры может быть использована серийно выпускаемая аппаратура с использованием информационных линий между искусственными спутниками диспетчерскими пунктами, а в качестве капсул могут быть использованы корпуса миноторпедного оружия с использованием штатного движительного устройства, например, при использовании корпусов торпеды или при использовании корпусов мин с несущественной модернизацией корпуса для реализации движителя пластинчатого типа, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности «промышленная применимость».
Кроме того, при использовании корпусов миноторпедного оружия при заранее запланированных исследованиях в океане в качестве диагностического модуля могут быть использованы плавсредства, что исключает необходимость в использовании парашютной системы, что значительно упрощает конструкцию корпуса капсулы и условия заполнения всей исследуемой области с обеспечением заданного распределения в исследуемой области.
Источники информации
1. Патент РФ № 2066466.
2. Патент РФ № 2041478.
3. Авторское свидетельство СССР № 532758.
4. Авторское свидетельство СССР № 530176.
5. Авторское свидетельство СССР № 1712784.
6. Патент РФ № 2050547.
7. Патент США № 3449950.
8. Авторское свидетельство СССР № 532759.
9. Авторское свидетельство СССР № 640114.
10. Авторское свидетельство СССР № 1037742.
11. Авторское свидетельство СССР № 1240169.
12. Авторское свидетельство СССР № 1535141.
13. Патент РФ № 1825092.
14. 3агородников А.А. Радиолокационная съемка морского волнения с летательных аппаратов. Л., Гидрометеоиздат, 1978, с.83, с.200.
15. Патент РФ № 2045081.
16. Патент РФ № 2133209.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА | 2010 |
|
RU2436134C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСНЫХ ДАННЫХ О СОСТОЯНИИ ОКЕАНА | 2004 |
|
RU2282217C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2365940C1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2001 |
|
RU2205417C2 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА | 2010 |
|
RU2426156C1 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2011 |
|
RU2490679C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
Изобретение относится к метеорологии и мониторингу окружающей среды и может найти применение при исследовании и контроле параметров атмосферы, земной поверхности и океана в любой точке земного шара. Сущность: транспортируют к области исследования диагностический модуль. Отделяют от него капсулы. Доставляют капсулы к исследуемой области. Измеряют физические параметры атмосферы, земной поверхности и океана при помощи измерительной аппаратуры, содержащейся в капсуле. Дополнительно определяют горизонтальные составляющие скорости и параметры вертикального движения капсулы с определением высоты волн. Включают эти параметры в состав информационного сообщения и передают через искусственный спутник Земли. Технический результат: повышение точности получения исходной информации об окружающей обстановке; расширение функциональных возможностей устройства, предназначенного для реализации данного способа. 2 н. и 4 з.п.ф-лы, 14 ил.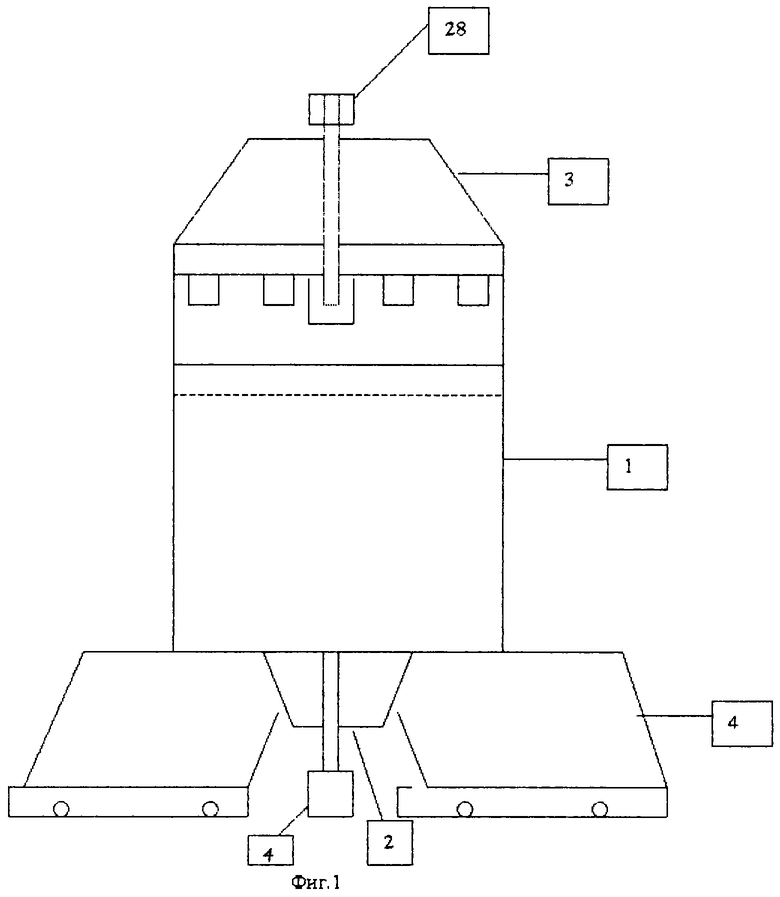
| Способ определения микросателлитной нестабильности | 2018 |
|
RU2717309C2 |
| Баллистическая капсула для радиоактивных отходов | 1991 |
|
SU1836726A3 |
| US 4951271 A1, 21.08.1990 | |||
| ДВИЖИТЕЛЬ ПЛАВУЧЕГО СРЕДСТВА | 1997 |
|
RU2133209C1 |
| Предохранительное приспособление при фуговочном станке или круглой пиле | 1928 |
|
SU16406A1 |
| Тело удобообтекаемого профиля | 1927 |
|
SU28778A1 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА | 1992 |
|
RU2041476C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2156958C1 |
| RU 2000132004 А, 27.11.2002 | |||
| СПОСОБ КАВИТАЦИОННОЙ ОБРАБОТКИ ЖИДКИХ НЕФТЕПРОДУКТОВ | 2010 |
|
RU2455341C1 |
| US 5209112 A1, 11.05.1993. | |||

