Изобретение относится к области информационно-управляющих систем мониторингом и может быть использовано в навигационных, пеленгационных и других средствах для обнаружения, определения координат одиночных и групповых объектов и их распознавания различными методами контроля.
Под групповым объектом будем понимать совокупность одиночных объектов, находящихся в одном позиционном районе и функционирующих в интересах достижения общей цели. Под одиночным объектом понимают танк, самолет, автомобиль (аппаратная радиосвязи) и т.д.
Известен способ по Пат. РФ №2427000, МПК B01S 5/04, обеспечивающий наведение видеокамеры на объект, положение которого в абсолютной системе координат с центром в точке размещения видеокамеры известно в этот момент времени, определяют ориентацию видеокамеры в системе координат видеокамеры, на основе определенной ориентации видеокамеры и положения объекта рассчитывают поворот системы координат видеокамеры в абсолютной системе координат. Полученные результаты используются для пересчета координат наблюдаемого объекта. Аналог представляет собой совместное использование радио и видео мониторинга. В результате достигается повышение точности определения местоположения одиночного контролируемого объекта. Однако названный способ реализуется на земной поверхности и обладает малым радиусом действия. Кроме того, недостаточная точность аналога также ограничивает его применение. Последнее связано с тем, что в кадре видеокамеры наблюдаются не только заданный одиночный объект, но и смежные с ним предметы, что затрудняет точное визирование видеокамеры. Аналогичными недостатками обладают и способы по Пат. РФ №№2251712, 2154284.
Известен способ по Пат. РФ №2323851, МПК В64С 31/06. Аналог предполагает использование беспилотного летательного аппарата (БПЛА) в совокупности с видеокамерой. Аналог обеспечивает фотографирование земной поверхности под управлением наземного поста.
Аналог представляет собой совместное использование воздушного и оптического мониторингов. В результате способ обладает большим радиусом действия.
Основные недостатки данного аналога состоят в том, что он не обеспечивает измерение координат объектов, а для принятия решения о фотографировании необходим оператор поста управления.
Известен способ по Пат. РФ №2465613, МПК G01S 3/14. Он предполагает установку под фюзеляжем летно-подъемного средства (ЛПС) видеокамеры, определение ориентации видеокамеры и антенной системы (АС) пеленгатора относительно борта ЛПС, а в процессе полета постоянное через заданный интервал времени определение местоположения ЛПС и его ориентации, а при обнаружении заданного источника радиоизлучения (ИРИ) определение его пространственно-информационных параметров с учетом пространственной ориентации видеокамеры, АС и собственно ЛПС путем последовательного перехода из одной системы координат в другую. Аналог реализует совместное использование радио и воздушного оптико-электронного мониторингов.
Способ-аналог позволяет с помощью видеокамеры и радиопеленгатора повысить точность определения местоположения ИРИ, расширить радиус действия измерителя.
Способу также присущ недостаток, связанный с относительно низкой точностью определения координат объектов. Практический интерес, как правило, представляет не сам ИРИ, а объект, на котором (или в котором) он размещается. В ситуации, когда ИРИ на объекте находится в выключенном состоянии, прототип теряет свою работоспособность. Кроме того, ИРИ часто выносят за пределы объекта, что также усугубляет ситуацию. Низкая точность определения координат объясняется тем, что в кадре видеокамеры одновременно наблюдается большая площадь земной поверхности, много превышающая площадь объекта, что и влечет за собой ошибки измерений.
Известен способ определения координат объектов по Пат. РФ №2513900, МПК G01S 13/46, В64С 31/06.
Способ-аналог заключается в том, что на подготовительном этапе на борту летно-подъемного средства под фюзеляжем устанавливают и фиксируют видеокамеру, запоминают коэффициенты дисторсии объектива видеокамеры, определяют ориентацию видеокамеры относительно борта ЛПС  , где
, где  - соответственно углы крена, тангажа и склонения видеокамеры, задают маршрут полета ЛПС, а в процессе полета постоянно через заданный интервал времени Δt определяют местоположение ЛПС
- соответственно углы крена, тангажа и склонения видеокамеры, задают маршрут полета ЛПС, а в процессе полета постоянно через заданный интервал времени Δt определяют местоположение ЛПС  , где
, где  соответственно широта, долгота и высота ЛПС в ti-й момент времени, i=1,2,…,I, и его пространственную ориентацию
соответственно широта, долгота и высота ЛПС в ti-й момент времени, i=1,2,…,I, и его пространственную ориентацию  , где
, где  соответственно углы крена, тангажа и склонения ЛПС в ti-й момент времени, совместно запоминают навигационные и временные параметры ЛПС, а при обнаружении j-го объекта в момент времени ti определяют его местоположение на кадре видеокамеры, преобразуют координаты j-го объекта в кадре на вектор направления на него в системе координат видеокамеры
соответственно углы крена, тангажа и склонения ЛПС в ti-й момент времени, совместно запоминают навигационные и временные параметры ЛПС, а при обнаружении j-го объекта в момент времени ti определяют его местоположение на кадре видеокамеры, преобразуют координаты j-го объекта в кадре на вектор направления на него в системе координат видеокамеры  с учетом влияния на результаты измерений дисторсии объектива, переводят координаты ЛПС в геоцентрическую систему координат
с учетом влияния на результаты измерений дисторсии объектива, переводят координаты ЛПС в геоцентрическую систему координат  корректируют вектор направления на j-й объект
корректируют вектор направления на j-й объект  с учетом априорно известной ориентации видеокамеры относительно борта ЛПС путем последовательного умножения значений на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления
с учетом априорно известной ориентации видеокамеры относительно борта ЛПС путем последовательного умножения значений на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления  на j-й объект с учетом измеренных в момент времени ti пространственных углов ЛПС: крена
на j-й объект с учетом измеренных в момент времени ti пространственных углов ЛПС: крена  , тангажа
, тангажа  и склонения
и склонения  определяют уточненные значения азимута
определяют уточненные значения азимута  , угла места
, угла места  и удаление ЛПС, находящегося в момент времени ti на высоте
и удаление ЛПС, находящегося в момент времени ti на высоте  , от j-го объекта
, от j-го объекта  , расположенного на поверхности «круглой» Земли, в геоцентрической системе координат определяют значение истинного вектора направления на j-й объект
, расположенного на поверхности «круглой» Земли, в геоцентрической системе координат определяют значение истинного вектора направления на j-й объект  , которое зависит от широты
, которое зависит от широты  и долготы
и долготы  местоположения ЛПС, определяют координаты точки пересечения вектора
местоположения ЛПС, определяют координаты точки пересечения вектора  с «круглой» Землей
с «круглой» Землей  , преобразуют геоцентрические координаты j-го объекта
, преобразуют геоцентрические координаты j-го объекта  в географические
в географические  , где Bj и Lj соответственно широта и долгота местоположения j-го объекта, при наличии k последовательных кадров, k=1,2,…,K, с изображением j-го объекта выполняют к циклов измерений географических координат
, где Bj и Lj соответственно широта и долгота местоположения j-го объекта, при наличии k последовательных кадров, k=1,2,…,K, с изображением j-го объекта выполняют к циклов измерений географических координат  , а результаты измерений усредняют, а при наличии цифровой карты местности района измерений, представляющей собой матрицу с дискретностью по координатам района измерений с соответствующими значениями высот рельефа, дополнительно уточняют географические координаты обнаруженного j-го объекта
, а результаты измерений усредняют, а при наличии цифровой карты местности района измерений, представляющей собой матрицу с дискретностью по координатам района измерений с соответствующими значениями высот рельефа, дополнительно уточняют географические координаты обнаруженного j-го объекта  . Способ реализует совместное использование радио и воздушного оптико-электронного мониторингов.
. Способ реализует совместное использование радио и воздушного оптико-электронного мониторингов.
Благодаря учету местоположения объекта в кадре видеокамеры в аналоге достигается более точное измерение вектора направления на объект. Возможность последующего усреднения результатов оценивания по кадрам и учет особенности рельефа местности способствуют дальнейшему повышению точностных характеристик способа.
Однако аналогу присущ недостаток, связанный с необходимостью участия оператора наземного поста управления в своевременном принятии решения о необходимости измерения координат конкретного объекта из их совокупности на кадре. Данная ситуация еще более усугубляется при необходимости одновременного управления несколькими БПЛА, например, четырьмя (см. «Орлан-10». http://bla-or-lan.ru/default/catalog/bla/jrlan-10.html), что влечет за собой пропуски и ошибочные решения. Кроме того, все аналоги не обеспечивают распознавание обнаруженных объектов.
Наиболее близким по своей технической сущности к заявляемому является способ определения координат по Пат. РФ №2550811, G01S 13/46, опубл. 20.05.2015, бюл. №14. Способ-прототип заключается в том, что на подготовительном этапе на борт летно-подъемного средства устанавливают и фиксируют видеокамеру для обзора нижней полусферы, запоминают коэффициенты дисторсии объектива видеокамеры, определяют ориентацию видеокамеры относительно борта ЛПС  , где
, где  - соответственно углы крена, тангажа и склонения видеокамеры, для каждого класса объектов формируют и запоминают набор эталонных вектор-контуров в совокупности с n первыми членами свертки ее автокорреляционной функции (АКФ), задают маршрут полета ЛПС, а в процессе полета постоянно через заданный интервал времени Δt определяют местоположение ЛПС
- соответственно углы крена, тангажа и склонения видеокамеры, для каждого класса объектов формируют и запоминают набор эталонных вектор-контуров в совокупности с n первыми членами свертки ее автокорреляционной функции (АКФ), задают маршрут полета ЛПС, а в процессе полета постоянно через заданный интервал времени Δt определяют местоположение ЛПС  , где
, где  соответственно широта, долгота и высота ЛПС в ti-й момент времени, i=1,2,…,I, и его пространственную ориентацию
соответственно широта, долгота и высота ЛПС в ti-й момент времени, i=1,2,…,I, и его пространственную ориентацию  , где
, где  соответственно углы крена, тангажа и склонения ЛПС в ti-й момент времени, совместно запоминают навигационные и временные параметры ЛПС, а при обнаружении j-го одиночного объекта в момент времени ti определяют его местоположение на кадре видеокамеры, преобразуют координаты j-го одиночного объекта в кадре на вектор направления на него в системе координат видеокамеры
соответственно углы крена, тангажа и склонения ЛПС в ti-й момент времени, совместно запоминают навигационные и временные параметры ЛПС, а при обнаружении j-го одиночного объекта в момент времени ti определяют его местоположение на кадре видеокамеры, преобразуют координаты j-го одиночного объекта в кадре на вектор направления на него в системе координат видеокамеры  с учетом влияния на результаты измерений дисторсии объектива, переводят координаты ЛПС в геоцентрическую систему координат
с учетом влияния на результаты измерений дисторсии объектива, переводят координаты ЛПС в геоцентрическую систему координат  , корректируют вектор направления на j-й объект
, корректируют вектор направления на j-й объект  с учетом априорно известной ориентации видеокамеры относительно борта ЛПС
с учетом априорно известной ориентации видеокамеры относительно борта ЛПС  путем последовательного умножения значений
путем последовательного умножения значений  на соответствующие углам Эйлера матрицы по-ворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления
на соответствующие углам Эйлера матрицы по-ворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления  на j-й одиночный объект с учетом измеренных в момент времени ti пространственных углов ЛПС: крена
на j-й одиночный объект с учетом измеренных в момент времени ti пространственных углов ЛПС: крена  , тангажа
, тангажа  и склонения
и склонения  , определяют уточненные значения азимута
, определяют уточненные значения азимута  угла места
угла места  и удаление ЛПС, находящегося в момент времени ti на высоте
и удаление ЛПС, находящегося в момент времени ti на высоте  от j-го одиночного объекта
от j-го одиночного объекта  , расположенного на поверхности «круглой» Земли, в геоцентрической системе координат определяют значение истинного вектора направления на j-й одиночный объект
, расположенного на поверхности «круглой» Земли, в геоцентрической системе координат определяют значение истинного вектора направления на j-й одиночный объект  , зависящее от широты
, зависящее от широты  и долготы
и долготы  местоположения ЛПС, определяют координаты точки пересечения вектора
местоположения ЛПС, определяют координаты точки пересечения вектора  с «круглой» Землей
с «круглой» Землей  , преобразуют геоцентрические координаты j-го одиночного объекта в географические
, преобразуют геоцентрические координаты j-го одиночного объекта в географические  , где Bj и Lj соответственно широта и долгота местоположения j-го одиночного объекта, при наличии k последовательных кадров, k=1,2,…,K, с изображением j-го одиночного объекта выполняют n циклов измерений географических координат
, где Bj и Lj соответственно широта и долгота местоположения j-го одиночного объекта, при наличии k последовательных кадров, k=1,2,…,K, с изображением j-го одиночного объекта выполняют n циклов измерений географических координат  , результаты измерений усредняют, а при наличии цифровой карты местности района измерений, представляющей собой матрицу с дискретностью по координатам района измерений с соответствующими значениями высот рельефа, уточняют географические координаты обнаруженного j-го одиночного объекта
, результаты измерений усредняют, а при наличии цифровой карты местности района измерений, представляющей собой матрицу с дискретностью по координатам района измерений с соответствующими значениями высот рельефа, уточняют географические координаты обнаруженного j-го одиночного объекта  , для распознавания обнаруженных одиночных объектов и принятия решения на их местоопределение находят вектор-контур обнаруженного объекта и первые n элементов вейвлетной свертки АКФ, сравнивают их с n первыми элементами сверток АКФ эталонных вектор-контуров, определяют и выделяют эталонные вектор-контура с минимальными отличиями от обнаруженного вектор-контура, определяют значения взаимнокорреляционных функций (ВКФ) для выделенных эталонных вектор-контуров и обнаруженного вектор-контура, сравнивают полученные значения ВКФ с заданным порогом, а при выполнении пороговых условий определяют эталонный вектор-контур с наибольшим значением ВКФ, принимают решение об обнаружении и идентификации одиночного объекта, соответствующего эталону с максимальным значением ВКФ, определяют координаты центра обнаруженного и идентифицированного одиночного объекта на кадре и формируют команду на его местоопределение, а в качестве выходных формируют данные о типе объекта, его географических координат и времени измерения.
, для распознавания обнаруженных одиночных объектов и принятия решения на их местоопределение находят вектор-контур обнаруженного объекта и первые n элементов вейвлетной свертки АКФ, сравнивают их с n первыми элементами сверток АКФ эталонных вектор-контуров, определяют и выделяют эталонные вектор-контура с минимальными отличиями от обнаруженного вектор-контура, определяют значения взаимнокорреляционных функций (ВКФ) для выделенных эталонных вектор-контуров и обнаруженного вектор-контура, сравнивают полученные значения ВКФ с заданным порогом, а при выполнении пороговых условий определяют эталонный вектор-контур с наибольшим значением ВКФ, принимают решение об обнаружении и идентификации одиночного объекта, соответствующего эталону с максимальным значением ВКФ, определяют координаты центра обнаруженного и идентифицированного одиночного объекта на кадре и формируют команду на его местоопределение, а в качестве выходных формируют данные о типе объекта, его географических координат и времени измерения.
Прототип обеспечивает повышение пропускной способности за счет более эффективного обнаружения и распознавания заданных одиночных объектов на основе видеоизображений с борта нескольких БПЛА, путем реализации процедур «компьютерного зрения». Положительный эффект способа базируется на использовании воздушного оптического мониторинга.
Однако прототипу присущи недостатки, ограничивающие его применение:
не обеспечивает распознавание групповых объектов, которые представляют наибольший интерес;
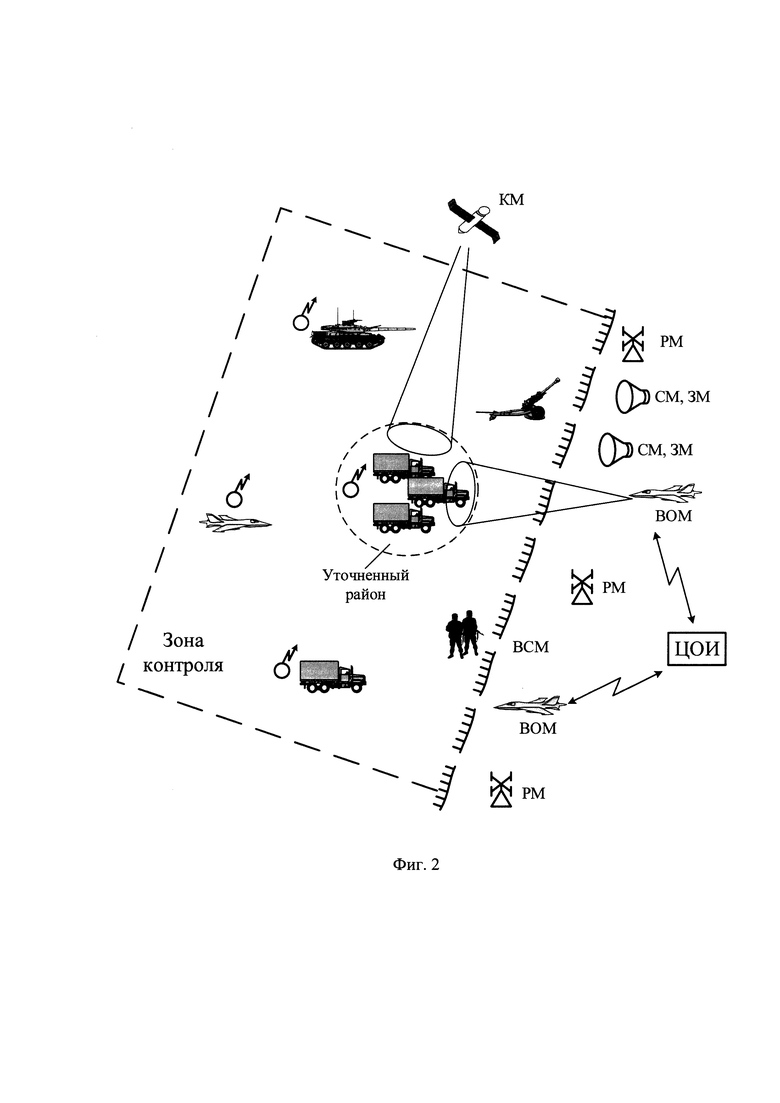
эффективность обнаружения и распознавания объектов прототипом ограничена в силу разных причин. Известно, что основными факторами проявляемости объектов выступают: топология размещения на местности, зависимость выбора района размещения от местных условий, взаимосвязанность района размещения с районами размещения других объектов, а также результат его функционирования в виде излучения и отображения энергии в различных физических полях. Одним из путей устранения названных недостатков является комплексное использование различных видов мониторинга. В качестве последних можно отметить радиомониторинг (РМ), войсковой и специальный мониторинг (ВСМ), локационный мониторинг (ЛМ), радиотехнический мониторинг (РТМ), космический мониторинг (КМ), звуковой и световой мониторинг (ЗСМ), инфракрасный мониторинг (ИКМ) и др.
В большинстве известных аналогов определение местоположения объектов основано на определении координат ИРИ.
Однако, практический интерес, как правило, представляет местоположение не ИРИ, а объект, на котором (или в котором) он размещается.
Во многих случаях ИРИ и обслуживаемый ими объект пространственно разнесены. В результате поставленная задача остается нерешенной. Проблемы с ее реализацией у прототипа возникают в ночное время суток, тумане, на сильно пересеченной местности и др.
Целью заявляемого технического решения является разработка способа определения координат объектов и их распознавание, обеспечивающий повышение вероятности обнаружения групповых объектов и их распознавание за счет комплексного применения всех видов мониторинга, на основе использования априорной информации о их структуре и топологии пространственного размещения в различных условиях боевой деятельности.
Поставленная цель достигается тем, что в известном способе определения координат, заключающемся в том, что на подготовительном этапе для ведения воздушного оптического мониторинга (ВОМ) на борт летно-подъемного средства устанавливают и фиксируют видеокамеру для обзора нижней полусферы, запоминают коэффициенты дисторсии объектива видеокамеры, определяют ориентацию видеокамеры относительно борта ЛПС  , где
, где  - соответственно углы крена, тангажа и склонения видеокамеры, для каждого класса объектов формируют и запоминают набор эталонных вектор-контуров в совокупности с n первыми членами свертки ее автокорреляционной функции, задают маршрут полета ЛПС, а в процессе полета на первом этапе работы постоянно через заданный интервал времени Δt определяют местоположение ЛПС
- соответственно углы крена, тангажа и склонения видеокамеры, для каждого класса объектов формируют и запоминают набор эталонных вектор-контуров в совокупности с n первыми членами свертки ее автокорреляционной функции, задают маршрут полета ЛПС, а в процессе полета на первом этапе работы постоянно через заданный интервал времени Δt определяют местоположение ЛПС  , где
, где  соответственно широта, долгота и высота ЛПС в ti-й момент времени, i=1,2,…,I, и его пространственную ориентацию
соответственно широта, долгота и высота ЛПС в ti-й момент времени, i=1,2,…,I, и его пространственную ориентацию  , где
, где  соответственно углы крена, тангажа и склонения ЛПС в ti-й момент времени, совместно запоминают навигационные и временные параметры ЛПС, а при обнаружении j-го одиночного объекта в момент времени ti определяют его местоположение на кадре видеокамеры, преобразуют координаты j-го одиночного объекта в кадре на вектор направления на него в системе координат видеокамеры
соответственно углы крена, тангажа и склонения ЛПС в ti-й момент времени, совместно запоминают навигационные и временные параметры ЛПС, а при обнаружении j-го одиночного объекта в момент времени ti определяют его местоположение на кадре видеокамеры, преобразуют координаты j-го одиночного объекта в кадре на вектор направления на него в системе координат видеокамеры  с учетом влияния на результаты измерений дисторсии объектива, переводят координаты ЛПС в геоцентрическую систему координат
с учетом влияния на результаты измерений дисторсии объектива, переводят координаты ЛПС в геоцентрическую систему координат  , корректируют вектор направления на j-й одиночный объект
, корректируют вектор направления на j-й одиночный объект  с учетом априорно известной ориентации видеокамеры относительно борта ЛПС
с учетом априорно известной ориентации видеокамеры относительно борта ЛПС  путем последовательного умножения значений
путем последовательного умножения значений  на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления
на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления  на j-й одиночный объект с учетом измеренных в момент времени tt пространственных углов ЛПС: крена
на j-й одиночный объект с учетом измеренных в момент времени tt пространственных углов ЛПС: крена  , тангажа
, тангажа  и склонения
и склонения  , определяют уточненные значения азимута
, определяют уточненные значения азимута  , угла места
, угла места  и удаление ЛПС, находящегося в момент времени ti на высоте
и удаление ЛПС, находящегося в момент времени ti на высоте  от j-го одиночного объекта
от j-го одиночного объекта  расположенного на поверхности «круглой» Земли, в геоцентрической системе координат определяют значение истинного вектора направления на j-й одиночный объект
расположенного на поверхности «круглой» Земли, в геоцентрической системе координат определяют значение истинного вектора направления на j-й одиночный объект  зависящее от широты
зависящее от широты  и долготы
и долготы  местоположения ЛПС, определяют координаты точки пересечения вектора
местоположения ЛПС, определяют координаты точки пересечения вектора  с «круглой» Землей
с «круглой» Землей  , преобразуют геоцентрические координаты j-го одиночного объекта в географические
, преобразуют геоцентрические координаты j-го одиночного объекта в географические  , где Bj и Lj соответственно широта и долгота местоположения j-го одиночного объекта, при наличии к последовательных кадров, k=1,2,…,K, с изображением j-го одиночного объекта выполняют n циклов измерений географических координат
, где Bj и Lj соответственно широта и долгота местоположения j-го одиночного объекта, при наличии к последовательных кадров, k=1,2,…,K, с изображением j-го одиночного объекта выполняют n циклов измерений географических координат  , результаты измерений усредняют, а при наличии цифровой карты местности района измерений, представляющей собой матрицу с дискретностью по координатам района измерений с соответствующими значениями высот рельефа, уточняют географические координаты обнаруженного j-го одиночного объекта
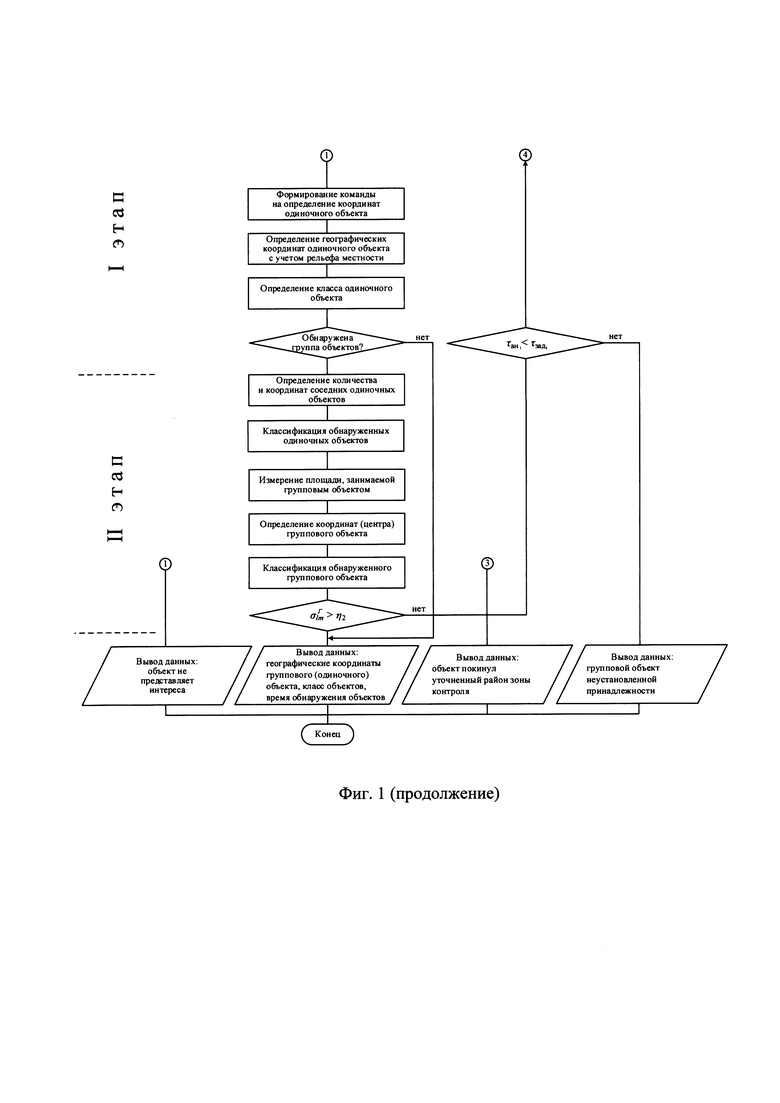
, результаты измерений усредняют, а при наличии цифровой карты местности района измерений, представляющей собой матрицу с дискретностью по координатам района измерений с соответствующими значениями высот рельефа, уточняют географические координаты обнаруженного j-го одиночного объекта  , для распознавания обнаруженных одиночных объектов и принятия решения на их местоопределение находят вектор-контур обнаруженного объекта и первые n элементов вейвлетной свертки АКФ, сравнивают их с n первыми элементами сверток АКФ эталонных вектор-контуров, определяют и выделяют эталонные вектор-контура с минимальными отличиями от обнаруженного вектор-контура, определяют значения взаимнокорреляционных функций (ВКФ) для выделенных эталонных вектор-контуров и обнаруженного вектор-контура, сравнивают полученные значения ВКФ с заданным порогом η1, а при выполнении пороговых условий определяют эталонный вектор-контур с наибольшим значением ВКФ, принимают решение об обнаружении и идентификации одиночного объекта, соответствующего эталону с максимальным значением ВКФ, определяют координаты центра обнаруженного и идентифицированного одиночного объекта на кадре и формируют команду на его местоопределение, а в качестве выходных формируют данные о типе одиночного объекта, его географических координат и времени измерения, одновременно с воздушным оптическим мониторингом дополнительно используют результаты других доступных видов мониторинга: войскового и специального мониторинга (ВСМ), радиомониторинга (РМ) и радиотехнического мониторинга (РТМ), космического мониторинга (КМ), звукового и светового мониторинга (ЗСМ), и инфракрасного мониторинга (ИКМ), предназначенные для обнаружения и определения координат одиночных и групповых объектов, формируют центр обработки информации (ЦОИ), предназначенный для управления совместной работой всех видов мониторинга, распознавания одиночных и групповых объектов на основе передаваемых на него результатов измерений от всех видов мониторинга, для этого на подготовительном этапе для каждого класса одиночных и групповых объектов и каждого вида мониторинга формируют и запоминают набор эталонных параметров для различных видов боевой деятельности, задают границы зоны контроля и его физико-географические условия, положение барьерного рубежа, а в процессе работы с помощью средств РМ определяют предварительное местоположение объекта на основе координат (xi, yi) обслуживающего его радиоэлектронного устройства, на основе которых ЦОИ уточняет маршрут полета одного из находящихся под его управлением ЛПС, осуществляющим ВОМ, с учетом прохождения линии барьерного рубежа, с борта ЛПС на ЦОИ транслируют видеокадры из уточненного района зоны контроля с центром (xi, yi), с помощью которых на ЦОИ обнаруживают и определяют местоположение одиночного объекта, а с помощью сравнения эталонных вектор-контуров с вектор-контуром обнаруженного объекта определяют его принадлежность к s-му классу одиночных объектов, s=1,2,…,S, S - количество классов одиночных объектов, а на втором этапе работы при обнаружении нескольких одиночных объектов в одном позиционном районе принимают решение о обнаружении группового объекта, определяют занимаемую площадь и координаты центра группового объекта и его принадлежность к l-му классу групповых объектов, l=1,2,…,L, L - количество классов групповых объектов, на основе сравнения эталонных вектор-признаков, хранящихся в базе данных ЦОИ, с вектор-признаками обнаруженного группового объекта путем нахождения ВКФ с максимальным значением, превысившим пороговый уровень η2, отображают полученные результаты в геоинформационной системе о типе объекта, его географических координатах и времени измерения, в случае необнаружения в уточненном районе одиночного объекта продолжают его поиск и анализ с использованием других доступных видов мониторинга на протяжении заданного на первый этап интервала времени
, для распознавания обнаруженных одиночных объектов и принятия решения на их местоопределение находят вектор-контур обнаруженного объекта и первые n элементов вейвлетной свертки АКФ, сравнивают их с n первыми элементами сверток АКФ эталонных вектор-контуров, определяют и выделяют эталонные вектор-контура с минимальными отличиями от обнаруженного вектор-контура, определяют значения взаимнокорреляционных функций (ВКФ) для выделенных эталонных вектор-контуров и обнаруженного вектор-контура, сравнивают полученные значения ВКФ с заданным порогом η1, а при выполнении пороговых условий определяют эталонный вектор-контур с наибольшим значением ВКФ, принимают решение об обнаружении и идентификации одиночного объекта, соответствующего эталону с максимальным значением ВКФ, определяют координаты центра обнаруженного и идентифицированного одиночного объекта на кадре и формируют команду на его местоопределение, а в качестве выходных формируют данные о типе одиночного объекта, его географических координат и времени измерения, одновременно с воздушным оптическим мониторингом дополнительно используют результаты других доступных видов мониторинга: войскового и специального мониторинга (ВСМ), радиомониторинга (РМ) и радиотехнического мониторинга (РТМ), космического мониторинга (КМ), звукового и светового мониторинга (ЗСМ), и инфракрасного мониторинга (ИКМ), предназначенные для обнаружения и определения координат одиночных и групповых объектов, формируют центр обработки информации (ЦОИ), предназначенный для управления совместной работой всех видов мониторинга, распознавания одиночных и групповых объектов на основе передаваемых на него результатов измерений от всех видов мониторинга, для этого на подготовительном этапе для каждого класса одиночных и групповых объектов и каждого вида мониторинга формируют и запоминают набор эталонных параметров для различных видов боевой деятельности, задают границы зоны контроля и его физико-географические условия, положение барьерного рубежа, а в процессе работы с помощью средств РМ определяют предварительное местоположение объекта на основе координат (xi, yi) обслуживающего его радиоэлектронного устройства, на основе которых ЦОИ уточняет маршрут полета одного из находящихся под его управлением ЛПС, осуществляющим ВОМ, с учетом прохождения линии барьерного рубежа, с борта ЛПС на ЦОИ транслируют видеокадры из уточненного района зоны контроля с центром (xi, yi), с помощью которых на ЦОИ обнаруживают и определяют местоположение одиночного объекта, а с помощью сравнения эталонных вектор-контуров с вектор-контуром обнаруженного объекта определяют его принадлежность к s-му классу одиночных объектов, s=1,2,…,S, S - количество классов одиночных объектов, а на втором этапе работы при обнаружении нескольких одиночных объектов в одном позиционном районе принимают решение о обнаружении группового объекта, определяют занимаемую площадь и координаты центра группового объекта и его принадлежность к l-му классу групповых объектов, l=1,2,…,L, L - количество классов групповых объектов, на основе сравнения эталонных вектор-признаков, хранящихся в базе данных ЦОИ, с вектор-признаками обнаруженного группового объекта путем нахождения ВКФ с максимальным значением, превысившим пороговый уровень η2, отображают полученные результаты в геоинформационной системе о типе объекта, его географических координатах и времени измерения, в случае необнаружения в уточненном районе одиночного объекта продолжают его поиск и анализ с использованием других доступных видов мониторинга на протяжении заданного на первый этап интервала времени  , при обнаружении объекта и невыполнении пороговых условий
, при обнаружении объекта и невыполнении пороговых условий  принимают решение о обнаружении объекта не представляющего интерес и прекращают дальнейший его анализ и определение уточненных координат, а в случае необнаружения объекта за интервал времени , принимают решение о покидании им уточненного района и прекращении дальнейших поисков, в случае невыполнения пороговых условий на втором этапе работы продолжают поиск и анализ недостающих элементов группового объекта с использованием для этого результатов измерений других доступных видов мониторинга, при этом результаты измерений различных видов мониторинга в виде вектор-признаков сравнивают с соответствующими эталонными векторами одиночных и групповых объектов до момента их обнаружения и распознавания, определения уточненных координат, если на протяжении заданного интервала времени
принимают решение о обнаружении объекта не представляющего интерес и прекращают дальнейший его анализ и определение уточненных координат, а в случае необнаружения объекта за интервал времени , принимают решение о покидании им уточненного района и прекращении дальнейших поисков, в случае невыполнения пороговых условий на втором этапе работы продолжают поиск и анализ недостающих элементов группового объекта с использованием для этого результатов измерений других доступных видов мониторинга, при этом результаты измерений различных видов мониторинга в виде вектор-признаков сравнивают с соответствующими эталонными векторами одиночных и групповых объектов до момента их обнаружения и распознавания, определения уточненных координат, если на протяжении заданного интервала времени  на втором этапе работы распознать объект не удалось,
на втором этапе работы распознать объект не удалось,  , принимают решение о обнаружении группового объекта неустановленной принадлежности.
, принимают решение о обнаружении группового объекта неустановленной принадлежности.
Благодаря новой совокупности признаков в заявляемом способе обеспечивается эффективное обнаружение и распознавание объектов всех типов на основе комплексного использования всех видов мониторинга независимо от рельефа местности, маскировочных мероприятий и погодных условий.
Сущность изобретения состоит в следующем. В способе-прототипе показана возможность обнаружения и измерения координат одиночных объектов (автомобиль, танк, самолет и т.д.) и их распознавание на основе поступающих с борта летно-подъемного средства видеообразов. Последние также могут быть получены с помощью других видов мониторинга, например, КМ. Кроме того, образы одиночных объектов могут быть добыты средствами радиотехнического и инфракрасного мониторинга. В тактической зоне хорошие результаты достигаются с помощью звукового (ЗМ) и светового мониторинга (СМ), совместным использованием радио и видео мониторинга. В тех случаях, когда эффективность одного вида мониторинга, например, воздушного (ВМ), падает вследствие маскировочных мероприятий на объекте, поставленная задача с заданным качеством может быть решена с привлечением другого или других видов мониторинга. В качестве последних в названной ситуации целесообразно использовать ИКМ или войсковой, специальный мониторинг (см. Кузьмин В.В., Удальцов Н.П., Подход к вскрытию объектов наблюдения за счет комплексного применения и обработки добываемой специальной информации от различных сил и средств мониторинга. Сборник трудов 72-й Всероссийской НТК, посвященной Дню радио. - СПб: Изд-во СПб ТЭТУ «ЛЭТИ», 2017. - с. 105-107).
Однако наибольший практический интерес представляют групповые объекты, которые, как правило, содержат набор (часто разнотипных) одиночных объектов. В качестве последних выступают: пункты управления (ПУ) войсками, узлы связи ПУ, группировки войск в позиционном районе и на марше, огневые позиции ракетных войск и артиллерии, средств противовоздушной обороны (ПВО) и др. Размещение их на местности не носят случайный характер, а подчинено достижению максимальной эффективности от их применения при решении поставленной задачи. Кроме того, топология размещения групповых объектов (удаление от барьерного рубежа, взаимные расстояния между ними и т.д.) для различных видов боевой деятельности определена руководящими документами. В качестве последних выступают, например, Полевой устав армии США (см. FM 3-90.6 Brigade Combat Team. - Washington: Headquarters, Department of the Army, 2010. - 224 p.; FM 30-5 Combat Intelligence. Washington: Department of the Army, 1956. - 143 p.). Учет требований руководящих документов по взаимному размещению групповых объектов на местности существенно упрощает задачу по их обнаружению и распознаванию. Для решения этой задачи также предлагается комплексное использование различных видов мониторинга.
Использование РМ, ранее позволявшего решать большинство актуальных задач по поиску, определению координат и распознаванию одиночных и групповых объектов, использующих радиоэлектронные средства (РЭС), в настоящее время находится в затруднительном положении. Современные контролируемые РЭС имеют широкий диапазон рабочих частот, используют режимы помехозащиты (например, псевдослучайную перестройку рабочей частоты (ППРЧ) и др.) и гарантированное закрытие передаваемой информации. Все это ограничивает входной информационный поток системы РМ в основном координатами радиоизлучателей. Исходя из сложившейся ситуации оптимальным является подход к распознаванию групповых объектов на основе выявления закономерностей в их взаимном размещении, базирующейся на принципе всеобщей взаимосвязанности предметов и явлений.
В связи с тем, что почти все одиночные и групповые объекты в своем составе имеют РЭС, на первом этапе осуществляют обнаружение и предварительную (грубую) оценку координат источников радиоизлучений с помощью средств РМ. Далее в этот район направляют ЛПС, на борту которого находятся средства ВДМ, ИКМ и локационного мониторинга (ЛМ). При обнаружении с помощью ВДМ группы одиночных объектов определяют их тип и общее количество, площадь и координаты центра занимаемого ими района. Полученные данные передают на центр обработки информации. Одновременно с воздушным ВДМ в измерениях могут участвовать средства ИКМ и ЛМ. Последние необходимы для измерений в сложных погодных условиях (туман, пурга и др.) и ночью, а также при эффективном выполнении на групповом объекте маскировочных мероприятий (см. Чабан Л.Н. Методы и алгоритмы распознавания образов в автоматизированном дешифровании данных дистанционного зондирования: Учебное пособие. - М: МИИГА и К, 2016. - 94 с.; Королев А.Ю., Королева А.А., Яковлев А.Д. Маскировка вооружения, техники и объектов. - СПб: Университет ИТМО, 2015. - 155 с.). Для решения поставленной задачи может привлекаться КМ. Для этого борт космического аппарата оснащают набором измерителей РМ, ВДМ, ЛМ и др. На ЦОИ возлагается задача на основе информации, получаемой от всех видов мониторинга, определить принадлежность групповых объектов. Данную операцию выполняют путем сравнения наборов эталонных характеристик для всех типов групповых объектов, хранящихся в базе данных и сформированных на подготовительном этапе, с полученными результатами измерений. Решение в пользу того или иного группового объекта принимают по максимальному значению взаимнокорреляционной функции превысившей пороговое значение.
Заявленный способ поясняется чертежами, на которых показаны:
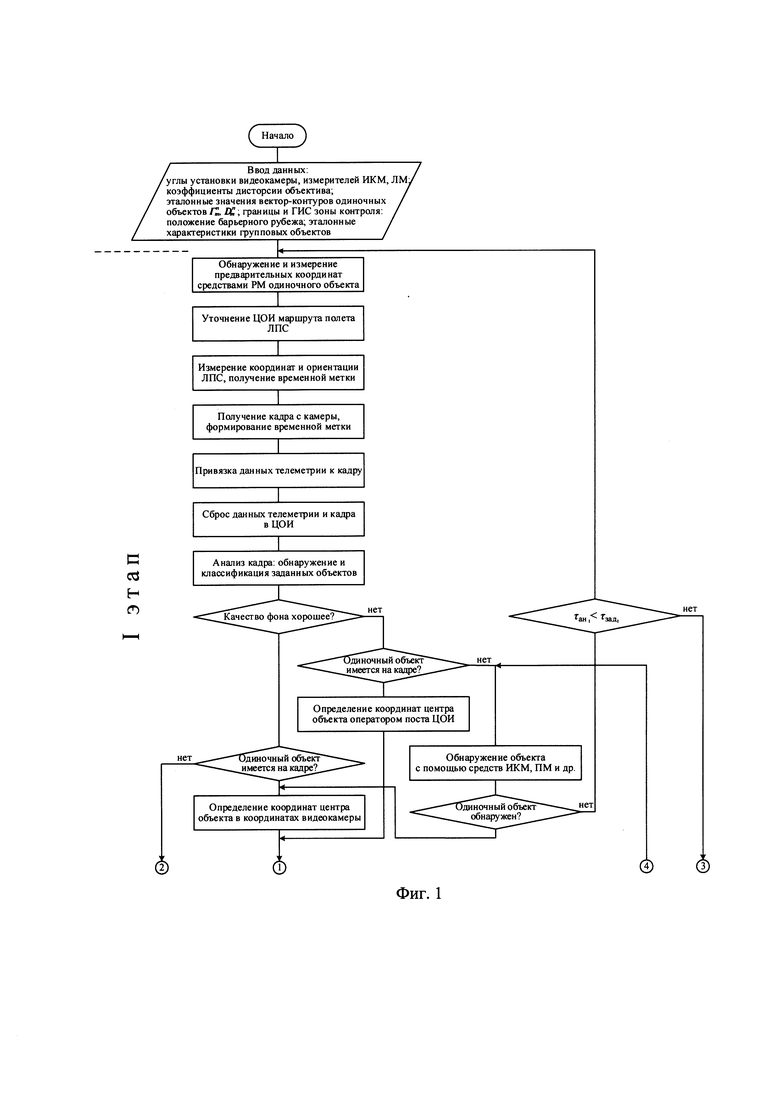
на фиг. 1 - обобщенный алгоритм определения местоположения объектов и их распознавания;
на фиг. 2 - порядок взаимодействия различных видов мониторинга;
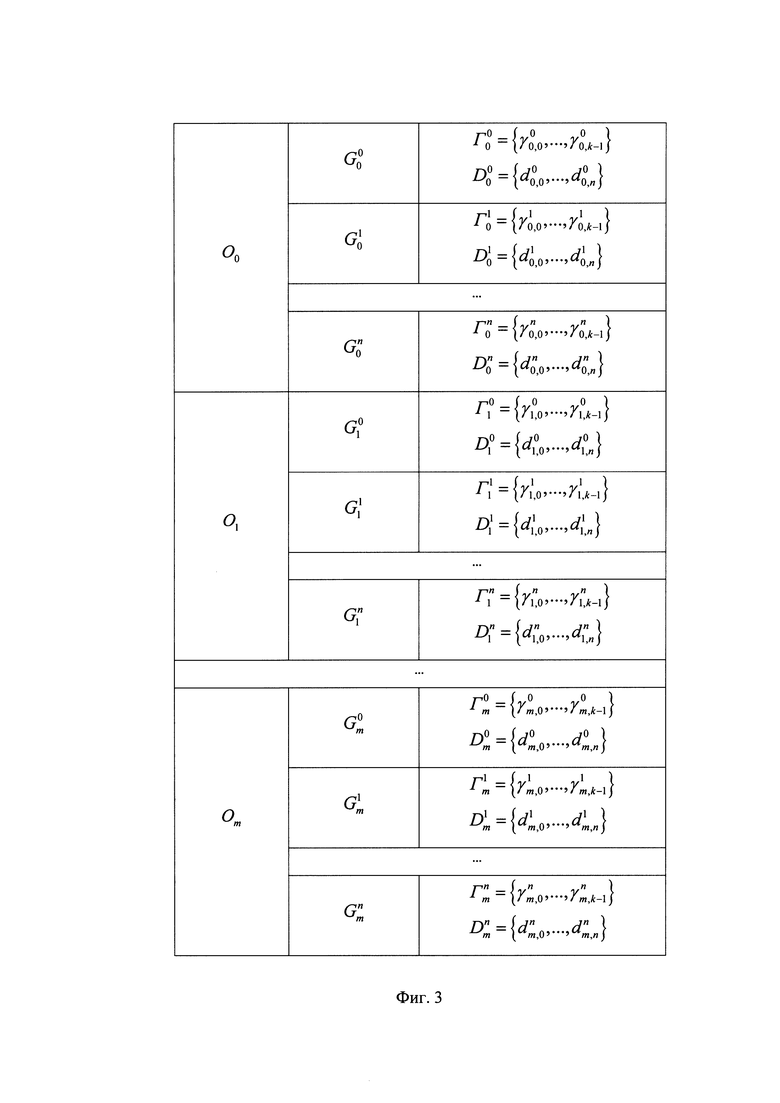
на фиг. 3 - порядок формирования эталонных данных одиночных объектов;
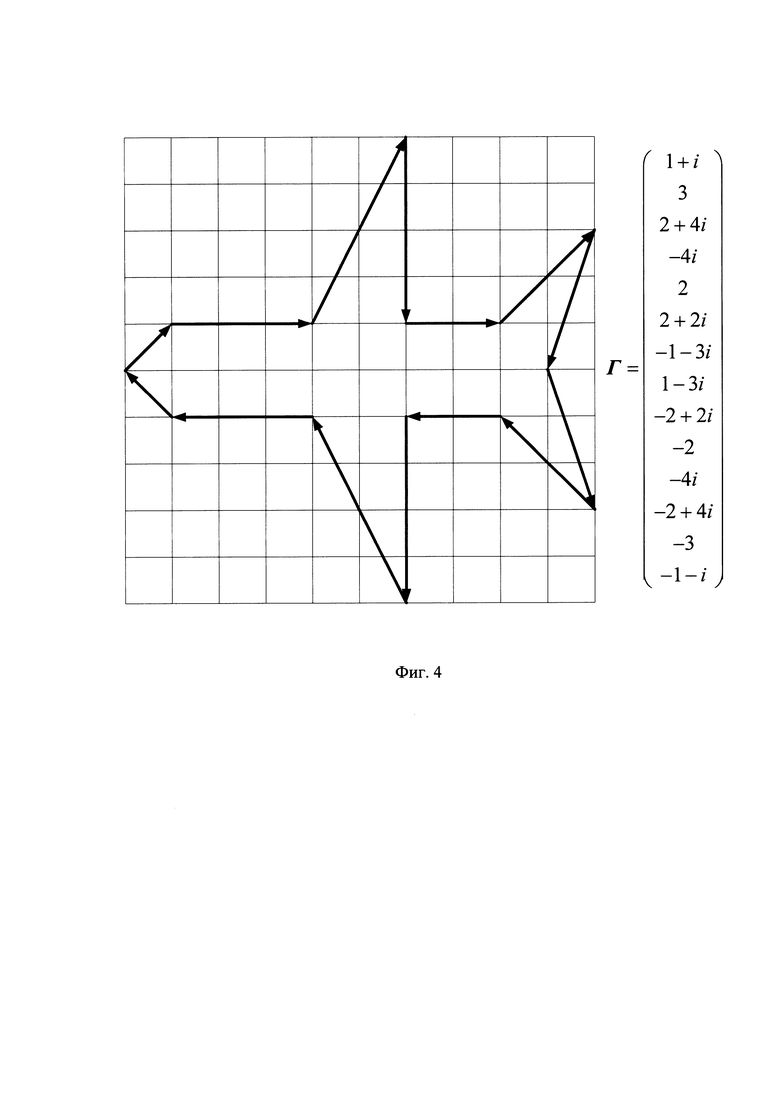
на фиг. 4 - инвариантность относительного сдвига начала отсчета при использовании комплексного вектор-контура для эталонного описания одиночного объекта;
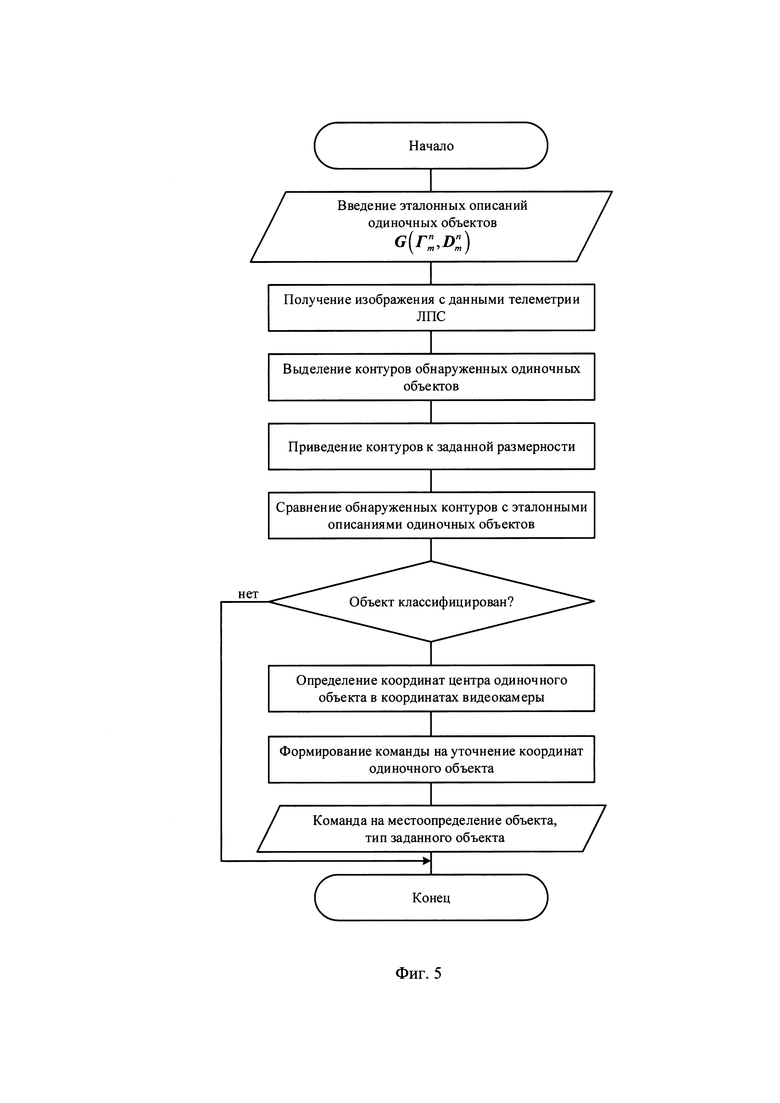
на фиг. 5 - обобщенный алгоритм распознавания одиночных объектов;
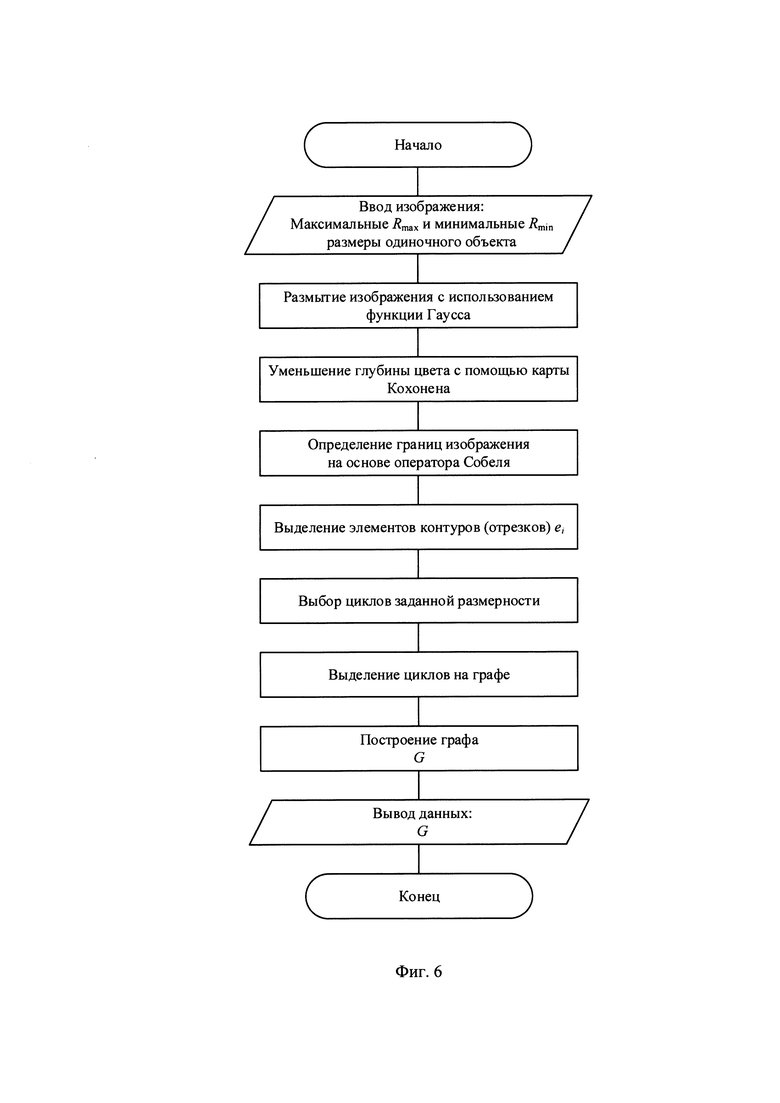
на фиг. 6 - алгоритм выделения вектор-контуров одиночных объектов;
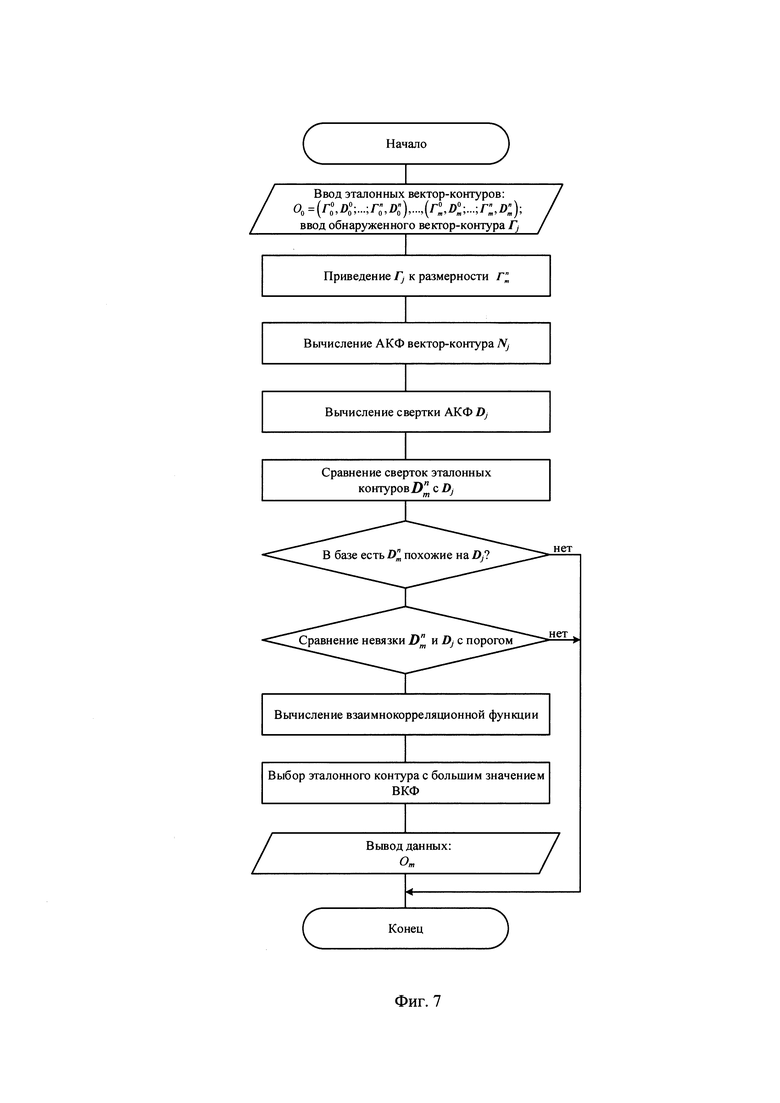
на фиг. 7 - алгоритм сравнения обнаруженных вектор-контуров с эталонными описаниями;
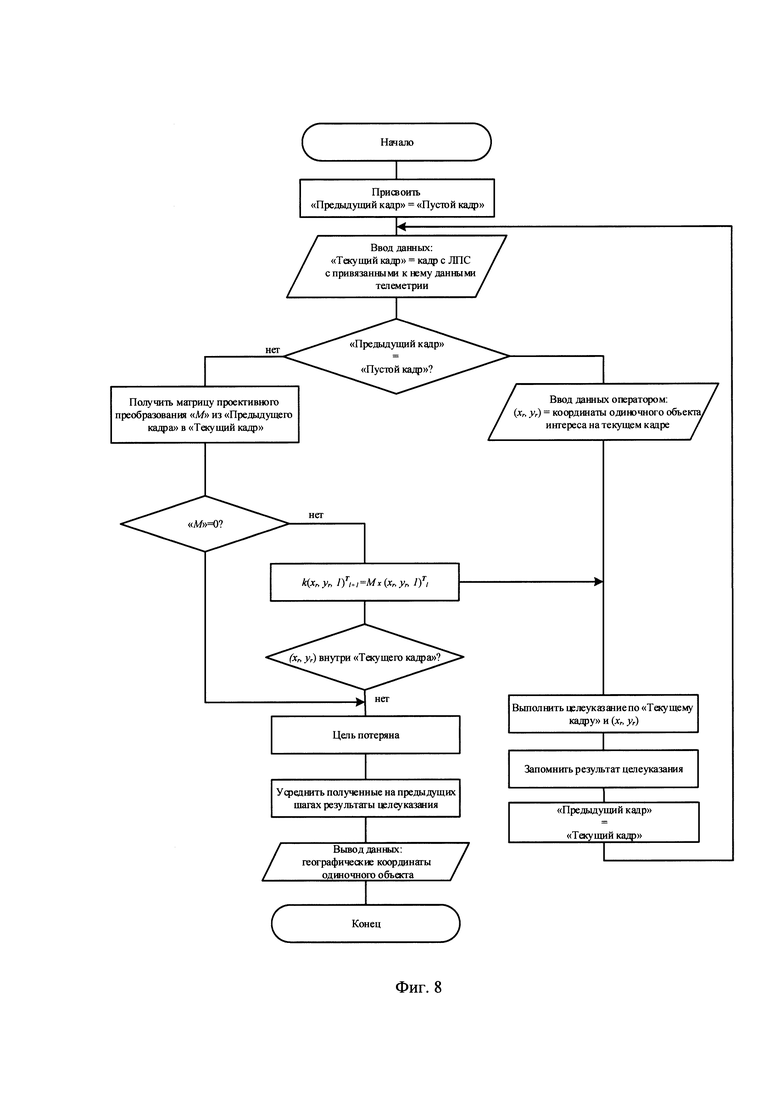
на фиг. 8 - алгоритм нахождения координат одиночных объектов [В, L, H)j в географической системе координат по одному кадру;
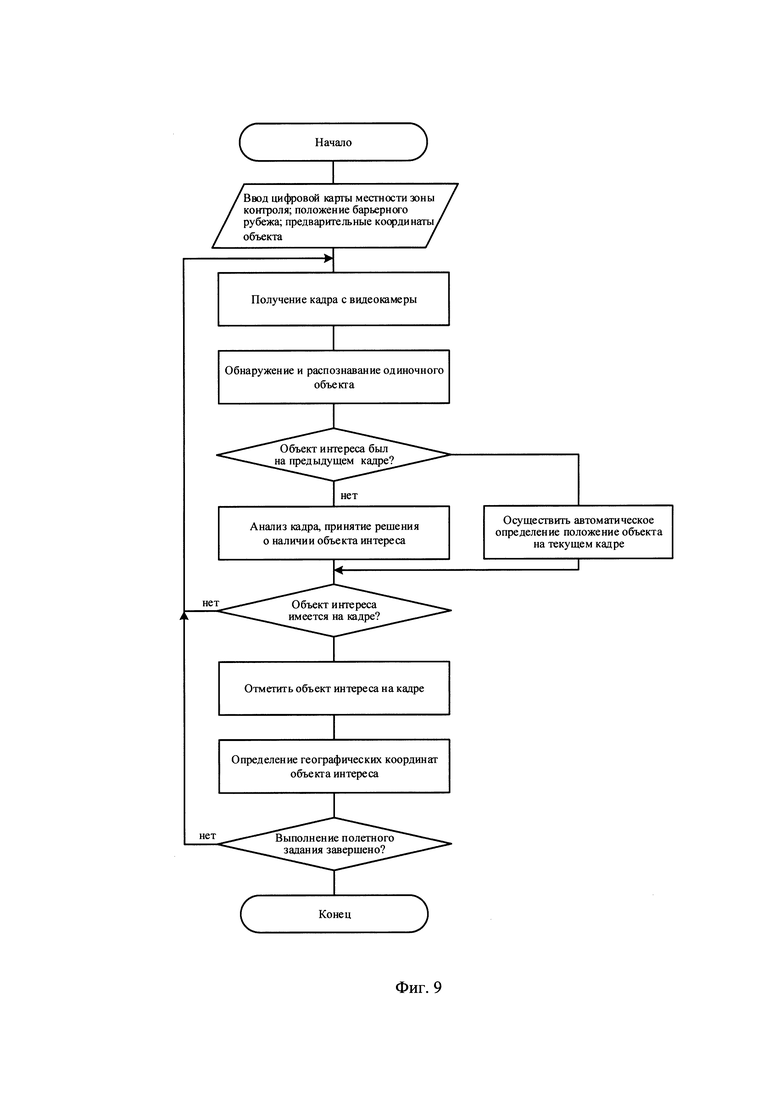
на фиг. 9 - алгоритм нахождения координат одиночных объектов (В, L, H)j в географической системе координат по серии кадров;
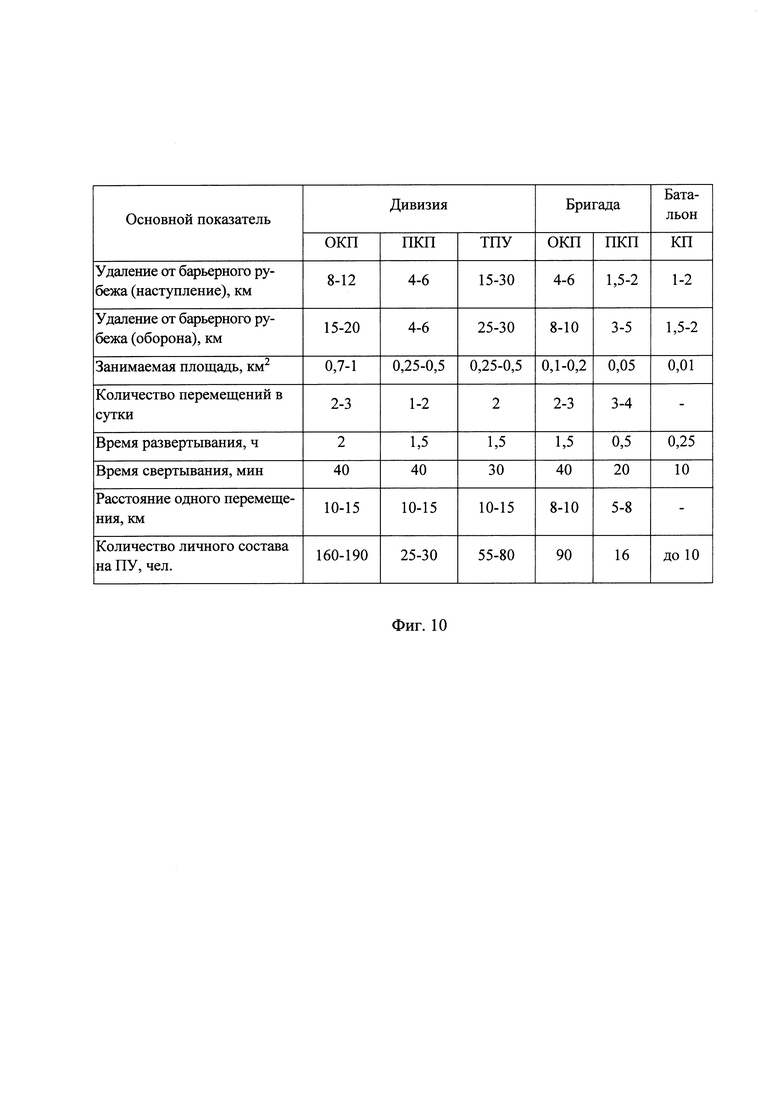
на фиг. 10 - пространственно-временные признаки групповых объектов мониторинга;
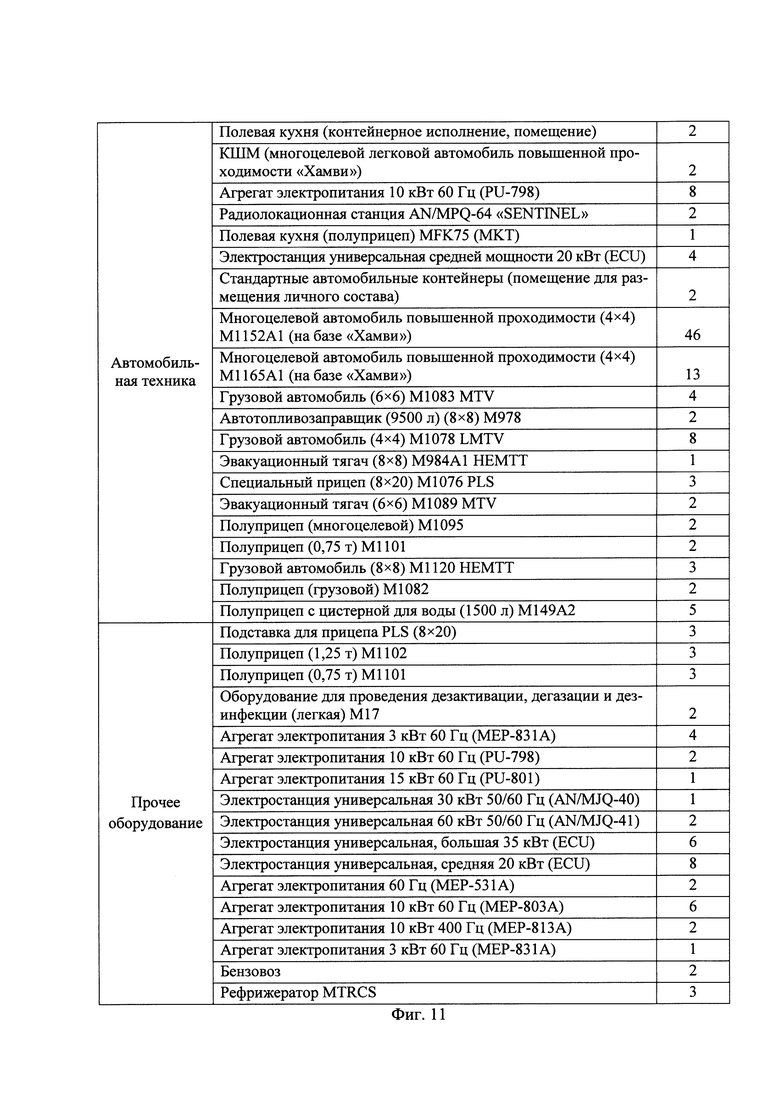
на фиг. 11 - количественные признаки (количество одиночных объектов) основного командного пункта (ОКП) механизированной дивизии (мд) ВС США;
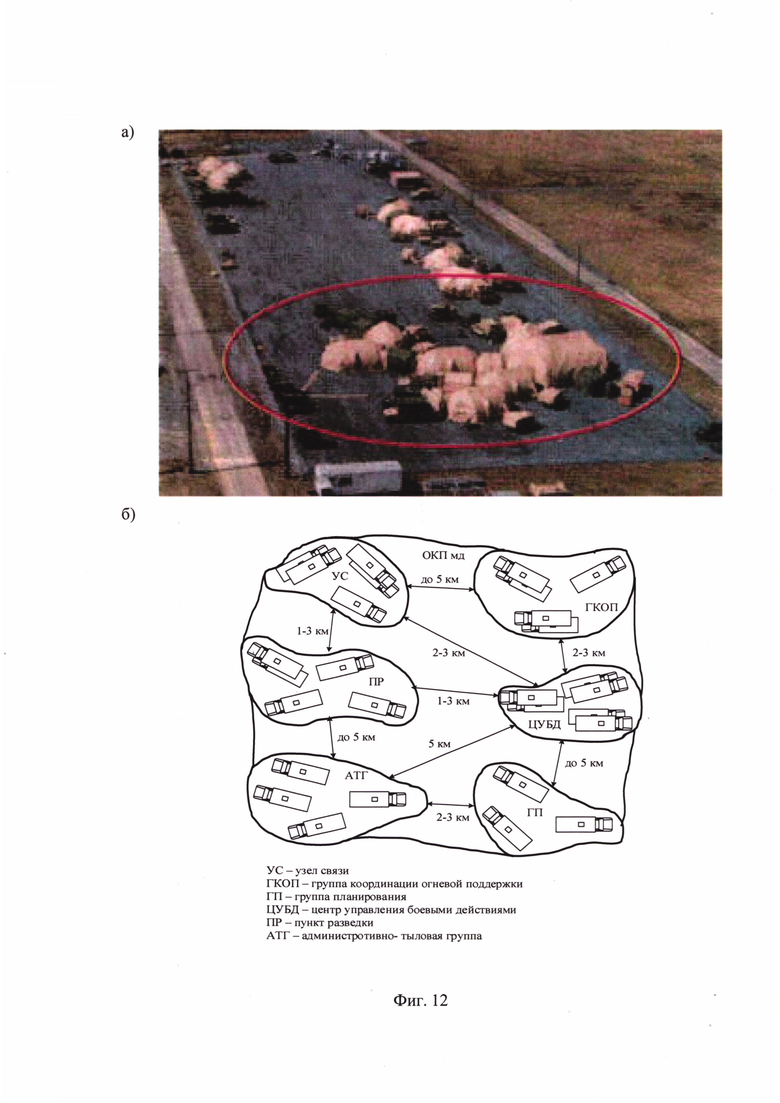
на фиг. 12 - вариант размещения ОКП мд ВС США:
а) при наличии пространственных ограничений;
б) пространственно-распределенная структура основного командного пункта дивизии ВС США;
на фиг. 13 - зависимость вероятности распознавания Ррас группового объекта (ОКП бронетанковой дивизии ВС США) от времени наблюдения tн различными видами мониторинга и их совокупности;
на фиг. 14 - зависимость вероятности распознавания Ррас группового объекта (ОКП дивизии ВС США) от количества используемых признаков Nпр и погрешностей в их измерении.
Реализация заявляемого способа поясняется следующим образом (см. фиг. 1, 2). На подготовительном этапе под фюзеляжем ЛПС устанавливают видеокамеру и фиксируют ее ориентацию. Измеряют ориентацию видеокамеры в трех плоскостях принятых в авиации как крена kk, тангажа lk и склонения  . Измеряют и запоминают коэффициенты дисторсии В1, В2, В3 объектива видеокамеры. Аналогичные действия осуществляют с оборудованием ИКМ и ЛМ.
. Измеряют и запоминают коэффициенты дисторсии В1, В2, В3 объектива видеокамеры. Аналогичные действия осуществляют с оборудованием ИКМ и ЛМ.
Формируют и запоминают библиотеку эталонных описаний заданных одиночных объектов (см. фиг. 3). Последние должны отвечать следующим требованиям:
обеспечивать точное сравнение обнаруженного контура с эталонным описанием объектов;
предоставлять возможность быстрого получения эталонных описаний контуров, близких к обнаруженному;
обеспечивать быструю дискриминацию контуров, точно не принадлежащих к заданным объектам.
Этим требованиям отвечает комплексный контур-вектор  , где
, где  . Такое представление одиночного объекта Oi инвариантно относительно сдвига начала координат, а преобразование поворота и масштаба изображения Oi эквивалентны операции умножения и повороту каждого элементарного вектора из состава комплексного вектора-контура (см. фиг. 4). Каждый класс одиночных объектов Oi предлагается задавать набором эталонных контуров
. Такое представление одиночного объекта Oi инвариантно относительно сдвига начала координат, а преобразование поворота и масштаба изображения Oi эквивалентны операции умножения и повороту каждого элементарного вектора из состава комплексного вектора-контура (см. фиг. 4). Каждый класс одиночных объектов Oi предлагается задавать набором эталонных контуров  , состоящих из комплексных вектор-контуров
, состоящих из комплексных вектор-контуров  и первых n членов вейвлет-свертки автокорреляционной функции
и первых n членов вейвлет-свертки автокорреляционной функции  , где n и k - параметры базы эталонов (см. фиг. 3).
, где n и k - параметры базы эталонов (см. фиг. 3).
На первом этапе с помощью средств РМ обнаруживают излучения РЭС одиночных объектов Oi и «грубо» определяют их координаты (xi, yi). В зависимости от диапазона радиоволн для этого используют как наземные измерители (см. Пат. РФ №№2283505, 2327186 и др.), так и воздушные (см. Пат РФ №№2594759, 2659808, 2659810 и др.). Полученные координаты РЭС передают на ЦОИ. Последний осуществляет наведение ЛПС мониторинга на обнаруженный РМ объект (уточненный район). Площадь района с текущим центром (xi, yi) задают на подготовительном этапе.
Изображения, получаемые на видеокамеру содержат как правило много высокочастотных шумов из-за высоких значений коэффициента усиления ISO, нагрева матрицы, артефактов сжатия JPEG и др., наличие которых негативно сказывается на выделение контуров объектов. Для борьбы с шумами (см. фиг. 6) используют размытие с применением функции Гаусса в качестве весовой функции (см. Fisher, Perkins Walker end Wolfart Spatial Filters-Laplacian of Gaussian, 2003)

где x(m, n) - входное изображение, y(m, n) - выходное изображение, a r - радиус размытия. Чем больше шума на изображении в силу разных причин, тем больше радиус r следует выбирать.
Большая глубина цвета изображения позволяет различать незначительные цветовые переходы, но также сильно увеличивает пространство для алгоритмов классификации. Для увеличения скорости работы алгоритма распознавания глубину цвета изображения уменьшают без потери информации о контурах и переходах. Это достигается с помощью самоорганизующейся карты Кохонена (см. Т. Kohonen. Self-Organizing Maps. - 3. ed. - New York: Springer, 2001. - 502 p.). Нейронные сети Кохонена SOM позволяют подстраиваться под различные условия съемки без участия оператора и обеспечивают кластеризацию многомерных вектор-контуров.
Для поиска границ (выделения контуров одиночного объекта) по аналогии с прототицом используют оператор Собеля (см. Харкевич А.А. Спектральный анализ. - М.: Физматгиз, 1963. - 432 с.), представляющий собой дискретный дифференциальный оператор, вычисляющий приблизительное значение градиента в каждой точке. Используемая при этом маска применения имеет вид

С помощью последней сворачивают исходное изображение для вычисления приближенных значений производных по горизонтали Gx и вертикали Gy

где Y - исходное изображение, * - обозначает двумерную операцию свертки. В каждой точке изображения приблизительное значение величины градиента можно вычислить используя выражение

В результате применения оператора Собеля выделяют элементы контуров (отрезки). С этой целью используют все особые точки (точки перегиба) и каждая пара соседних точек образует отрезок. При этом отрезки слишком малой и слишком большой длины исключают из рассмотрения.
После выделения множества отрезков находят все замкнутые контура. В начале строится граф, причем вершины, находящихся на расстоянии меньше заданного значения ∈ отожествляется. Далее полученный граф упрощается:
удаляются кратные ребра;
удаляются вершины степени один и инцидентные им ребра (процесс повторяется пока существуют вершины степени один), так как они не могут быть частью замкнутого контура.
Для выполнения операции сравнения найденный контур должен иметь размерность, соответствующую используемой в базе эталонов. Реализацию этого требования осуществляют следующим образом. Исходный контур  размерностью
размерностью  преобразуется в вектор-контур
преобразуется в вектор-контур  размерности k. При этом возможны две ситуации, когда k'>k и k'<k. В первой из них
размерности k. При этом возможны две ситуации, когда k'>k и k'<k. В первой из них  используется преобразование
используется преобразование

В ситуации, когда k'<k, выполняется интерполяция в соответствии с выражением

где  .
.
Непосредственно сравнение контуров Гэт и Nизм осуществляют при помощи взаимнокорреляционной функции (см. Введение в контурный анализ и его приложения к обработке изображений и сигналов. Под. ред. Фурман Я.А. - М.: Физматлит, 2003. - 592 с.)

где  - вектор-контур, полученный из Nизм путем циклического сдвига элементарных векторов на n позиций, n=0, 1 ,…, k-1. Значения взаимно-корреляционной функции отражают степень сходства контуров Гэт и Nизм при сдвиге Nизм на n позиций. Максимум ВКФ τmax определяют из выражения
- вектор-контур, полученный из Nизм путем циклического сдвига элементарных векторов на n позиций, n=0, 1 ,…, k-1. Значения взаимно-корреляционной функции отражают степень сходства контуров Гэт и Nизм при сдвиге Nизм на n позиций. Максимум ВКФ τmax определяют из выражения

Вычисление ВКФ является трудоемкой операцией  , где m - количество эталонов), k - количество элементарных векторов в составе вектор-контура, поэтому требуется некоторый дескриптор контура, который позволяет быстро
, где m - количество эталонов), k - количество элементарных векторов в составе вектор-контура, поэтому требуется некоторый дескриптор контура, который позволяет быстро  выбрать достаточно близкие эталоны и вычислить ВКФ только для них. В качестве такого дескриптора используют вейвлетную свертку Уолша автокорреляционной функции
выбрать достаточно близкие эталоны и вычислить ВКФ только для них. В качестве такого дескриптора используют вейвлетную свертку Уолша автокорреляционной функции  (см. Введение в контурный анализ; приложения к обработке изображений и сигналов / Я.А. Фурман, А.В. Кревецкий, А.К. Передреев и др. Под ред. Я.А. Фурмана. - 2-е изд., испр. - М.: Физматлит, 2003. - 592 с.). Близость первых четырех-пяти компонент сверток обнаруженного и контуров-эталонов является основанием нахождения для них ВКФ.
(см. Введение в контурный анализ; приложения к обработке изображений и сигналов / Я.А. Фурман, А.В. Кревецкий, А.К. Передреев и др. Под ред. Я.А. Фурмана. - 2-е изд., испр. - М.: Физматлит, 2003. - 592 с.). Близость первых четырех-пяти компонент сверток обнаруженного и контуров-эталонов является основанием нахождения для них ВКФ.
После выбора наиболее близких пяти-шести эталонов осуществляют точный анализ путем нахождения ВКФ в соответствии с (6) и поиск τmax в соответствии с (7). В случае, если τmax превышает заданное (пороговое) значение, принимается решение об обнаружении j-го одиночного объекта, с последующим определением координат центра объекта на кадре в пикселях  . Последнее отсчитывают от верхнего левого угла кадра.
. Последнее отсчитывают от верхнего левого угла кадра.
Полученные координаты j-го одиночного объекта в кадре преобразуют в направление на него в системе координат видеокамеры  . Данная операция выполняется в соответствии с выражением
. Данная операция выполняется в соответствии с выражением

где  , F - фокусное расстояние объектива видеокамеры, пересчитанное в пиксели матрицы (кадра),
, F - фокусное расстояние объектива видеокамеры, пересчитанное в пиксели матрицы (кадра),  - координаты центра матрицы в пикселях, В1, В2, В3 - измеренные коэффициенты дисторсии объектива (см. Szeliski, Richard. Computer: Algorithms and Applications. - Sprintger, 2010). Произведя переобозначение
- координаты центра матрицы в пикселях, В1, В2, В3 - измеренные коэффициенты дисторсии объектива (см. Szeliski, Richard. Computer: Algorithms and Applications. - Sprintger, 2010). Произведя переобозначение  выражение (8) принимает вид
выражение (8) принимает вид

где  . Вектор
. Вектор  определяется на основе известных параметров видеокамеры и координат j-го одиночного объекта на кадре
определяется на основе известных параметров видеокамеры и координат j-го одиночного объекта на кадре

Таким образом, обозначив  получаем уравнение, решением которого является искомый вектор
получаем уравнение, решением которого является искомый вектор 

Численное значение вектора  находится методом простых итераций.
находится методом простых итераций.
Направление на j-й одиночный объект определено без учета ориентации видеокамеры относительно корпуса ЛПС и собственно ориентации ЛПС в пространстве. В силу названных причин в предлагаемом способе по аналогии с аналогом (см. Пат РФ №2465613) на первом этапе учитывают ориентацию видеокамеры относительно ЛПС и положение ЛПС в пространстве. Это достигается путем последовательного перехода из одной системы координат в другую, что удобнее и быстрее выполнять в декартовой системе координат. На втором этапе определения координат одиночных объектов учитывают особенности рельефа местности района измерений. Данные этапы достаточно полно освещены в Пат. РФ №2419106, МПК G01S 13/46, опубл. 28.05.2011 и Пат. РФ №2458360 МПК G01S13/46, 5/02, 3/14, опубл. 01.08.2012.
Координаты ЛПС  , измеренные в момент времени ti, преобразуют в геоцентрическую систему координат:
, измеренные в момент времени ti, преобразуют в геоцентрическую систему координат:

В первом преобразовании вектора направления на j-й одиночный объект  учитывают априорно известную ориентацию видеокамеры относительно ЛПС на основе данных, полученных на подготовительном этапе. Коррекцию осуществляют в плоскости трех углов Эйлера: крена kk, тангажа lk и склонения
учитывают априорно известную ориентацию видеокамеры относительно ЛПС на основе данных, полученных на подготовительном этапе. Коррекцию осуществляют в плоскости трех углов Эйлера: крена kk, тангажа lk и склонения  . Исходный вектор последовательно перемножают на три соответствующие углам Эйлера матрицы поворота (см. фиг. 8)
. Исходный вектор последовательно перемножают на три соответствующие углам Эйлера матрицы поворота (см. фиг. 8)

где 
На следующем этапе в нормальной системе координат осуществляют преобразование скорректированного вектора направления на j-й одиночный объект  с целью учета ориентации ЛПС относительно земной поверхности и положения ЛПС в пространстве, что позволяет получить уточненное значение вектора направления на j-й объект
с целью учета ориентации ЛПС относительно земной поверхности и положения ЛПС в пространстве, что позволяет получить уточненное значение вектора направления на j-й объект  . Переход через эту систему координат продиктован тем, что в ней измеряются углы ориентации ЛПС. Получение вектора направления на источник
. Переход через эту систему координат продиктован тем, что в ней измеряются углы ориентации ЛПС. Получение вектора направления на источник  в нормальной системе координат также предпочтительно. Сформированный на предыдущем этапе вектор
в нормальной системе координат также предпочтительно. Сформированный на предыдущем этапе вектор  последовательно перемножают на три соответствующие матрицы поворота (относительно каждой из названных осей)
последовательно перемножают на три соответствующие матрицы поворота (относительно каждой из названных осей)

где, 
Уточненные значения азимута  и угла места
и угла места  определяют из выражения (14) следующим образом:
определяют из выражения (14) следующим образом:

Здесь вектор  находится в нормальной системе координат: ОХ+ - направление на север, OY+ - на восток, OZ+ - к центру Земли.
находится в нормальной системе координат: ОХ+ - направление на север, OY+ - на восток, OZ+ - к центру Земли.
Для нахождения расстояния между ЛПС и j-м одиночным объектом d  необходимо учесть шарообразный характер поверхности Земли. Иначе, данная задача может быть интерпретирована как нахождение расстояния , на котором вектор
необходимо учесть шарообразный характер поверхности Земли. Иначе, данная задача может быть интерпретирована как нахождение расстояния , на котором вектор  пересечется с «круглой» Землей на высоте метров:
пересечется с «круглой» Землей на высоте метров:

где D - дискриминант квадратного уравнения:  , R - радиус Земли, R=6370000 м. Следует отметить, что расстояние возможно определить при условии D≥0. В противном случае начинают новый цикл измерений пространственных параметров j-го одиночного объекта
, R - радиус Земли, R=6370000 м. Следует отметить, что расстояние возможно определить при условии D≥0. В противном случае начинают новый цикл измерений пространственных параметров j-го одиночного объекта  и
и  .
.
Нормальная система координат, в которой на данном этапе находится уточненный вектор  , расположена с некоторым поворотом, который зависит от широты и долготы местоположения ЛПС. Для окончательного перехода в геоцентрическую систему координат необходимо довернуть вектор на широту ЛПС и π/2 минус долготу ЛПС
, расположена с некоторым поворотом, который зависит от широты и долготы местоположения ЛПС. Для окончательного перехода в геоцентрическую систему координат необходимо довернуть вектор на широту ЛПС и π/2 минус долготу ЛПС  используя матрицы поворота, а затем перенести центр системы координат в центр Земли используя геоцентрические координаты ЛПС. В результате имеем истинный вектор
используя матрицы поворота, а затем перенести центр системы координат в центр Земли используя геоцентрические координаты ЛПС. В результате имеем истинный вектор  направления на j-й одиночный объект
направления на j-й одиночный объект

где 
На этом завершается первый этап измерений.
На следующем этапе результаты вычислений угла места  сравнивают с пороговым значением Δβ, определяющим заданную потенциальную точность измерения местоположения объектов. Следует отметить, что угол места на источник
сравнивают с пороговым значением Δβ, определяющим заданную потенциальную точность измерения местоположения объектов. Следует отметить, что угол места на источник  соответствует горизонту,
соответствует горизонту,  - зениту.
- зениту.
Координаты объекта на «круглой» Земле в геоцентрической системе координат по направлению и расстоянию на высоте Н0 по аналогии с аналогом (см. Пат. РФ №2465613) находят с помощью выражения:
Переход от (19) к более удобной географической системе координат  осуществляют следующим образом:
осуществляют следующим образом:
широта  ,
,
долгота 
При малых значениях  (обеспечивается низкая точность измерения координат объекта), а также при выполнении пороговых условий и отсутствии цифровой карты рельефа местности зоны контроля, определяют координаты точки пересечения истинного вектора направления на j-й одиночный объект
(обеспечивается низкая точность измерения координат объекта), а также при выполнении пороговых условий и отсутствии цифровой карты рельефа местности зоны контроля, определяют координаты точки пересечения истинного вектора направления на j-й одиночный объект  с «круглой» Землей, которые далее поступают на выход и используются в качестве искомой величины.,
с «круглой» Землей, которые далее поступают на выход и используются в качестве искомой величины.,
При выполнении пороговых условий  и наличия цифровой карты рельефа зоны контроля становится возможным более точное измерение координат. Порядок выполняемых при этом операций подробно рассмотрен в Пат РФ №2465613.
и наличия цифровой карты рельефа зоны контроля становится возможным более точное измерение координат. Порядок выполняемых при этом операций подробно рассмотрен в Пат РФ №2465613.
Результаты вычислений координат  преобразуют в удобную географическую систему координат
преобразуют в удобную географическую систему координат  в соответствии с выражением (20). Соответствующее значение Hjδ берется из массива цифровой карты рельефа местности.
в соответствии с выражением (20). Соответствующее значение Hjδ берется из массива цифровой карты рельефа местности.
Повышение точности определения координат объектов  достигается при работе с последовательностью видеокадров и привязанными к ним данными телеметрии (см. фиг. 9).
достигается при работе с последовательностью видеокадров и привязанными к ним данными телеметрии (см. фиг. 9).
В этом случае для каждого кадра серии вычисляют координаты объекта интереса  . При этом обеспечивается высокая точность, поскольку используют результаты измерений координат и ориентации ЛПС, сделанные на всей серии кадров.
. При этом обеспечивается высокая точность, поскольку используют результаты измерений координат и ориентации ЛПС, сделанные на всей серии кадров.
Запишем координаты j-го одиночного объекта в пикселях на l-м кадре  . Тогда координаты этого объекта в 1+1-м кадре примут вид
. Тогда координаты этого объекта в 1+1-м кадре примут вид  . Известно (см. Szeliski, Richard. Computer: Algorithms and Applications. - Sprintger, 2010), что при съемке плоской поверхности (в данном случае земной поверхности) одной и той же видеокамерой с двух позиций справедливо выражение, связывающее координаты одного и того же объекта на l-м и l+1-м кадрах:
. Известно (см. Szeliski, Richard. Computer: Algorithms and Applications. - Sprintger, 2010), что при съемке плоской поверхности (в данном случае земной поверхности) одной и той же видеокамерой с двух позиций справедливо выражение, связывающее координаты одного и того же объекта на l-м и l+1-м кадрах:

где  - матрица проективного преобразования из l-го кадра в l+1-й. Определяется взаимным расположением видеокамер в l-й и l+1-й позициях и имеет вид:
- матрица проективного преобразования из l-го кадра в l+1-й. Определяется взаимным расположением видеокамер в l-й и l+1-й позициях и имеет вид:
Определение значения матрицы выполняют следующим образом. При помощи алгоритма SURF (см. Herbert Bay, Andreas Ess, Tinne Tnytelaars, Luc Van Gool. SURF: Speeded Up Robust Features. - Computer Vision and Image Understanding (CVIU), Vol. 110, №3, 2008, p. 346-359) осуществляют поиск наборов контрастных точек на двух изображениях  и
и  . Для каждой точки из набора контрастных точек реализуют вычисление ее характеристики при помощи алгоритма BRIEF (см. М. Colonder, V. Lepetit, С. Strecha, P. Fua. BRIEF: Bonary Robust Independent Elementary Features. ECCV, 2010). Далее путем попарного сравнения вычисленных характеристик точек находят множество пар точек
. Для каждой точки из набора контрастных точек реализуют вычисление ее характеристики при помощи алгоритма BRIEF (см. М. Colonder, V. Lepetit, С. Strecha, P. Fua. BRIEF: Bonary Robust Independent Elementary Features. ECCV, 2010). Далее путем попарного сравнения вычисленных характеристик точек находят множество пар точек  , где
, где  - контрастная точка в l-м изображении (кадре), а
- контрастная точка в l-м изображении (кадре), а  - найденная как соответствующая ей контрастная точка в l+1-м изображении.
- найденная как соответствующая ей контрастная точка в l+1-м изображении.
При обнаружении Р пар соответствующих друг другу точек  , р=1, 2, …, Р, согласно (5) имеют место 2Р линейных уравнений относительно восьми неизвестных коэффициентов матрицы μ:
, р=1, 2, …, Р, согласно (5) имеют место 2Р линейных уравнений относительно восьми неизвестных коэффициентов матрицы μ:

На практике число Р достаточно велико по сравнению с минимально необходимым для решения данной системы. Однако среди найденных соответствий контрастных точек могут быть ошибочные совпадения. Данная проблема устраняется при помощи алгоритма RANSAC (см. Martin A. Fischler and Robert С. Bolles (June 1981). Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Comm. of the ACM24 (6): 381-395. doi: 10.1145/358669.358692). Алгоритм запускается на фиксированное число итераций, на каждой из которых из n найденных соответствий выбирается s случайных пар. Из выбранных пар получают систему из 2s линейных уравнений, которая решается методом наименьших квадратов. Д ля полученного решения считается невязка на всем наборе из 2n уравнений. После выполнения фиксированного числа итераций в качестве μ выбирается наилучшее решение.
В результате, найдя матрицу проективного преобразования между соседними кадрами становится возможным нахождение координат объекта  на последующем l+1-м кадре последовательности. С каждым последующим кадром местоположение j-го одиночного объекта уточняется, что и приводит к повышению точности измерений. Переход от координат
на последующем l+1-м кадре последовательности. С каждым последующим кадром местоположение j-го одиночного объекта уточняется, что и приводит к повышению точности измерений. Переход от координат  к вектору направления
к вектору направления  в координатах видеокамеры на каждом очередном кадре осуществляют в соответствии с выражениями (8)-(11).
в координатах видеокамеры на каждом очередном кадре осуществляют в соответствии с выражениями (8)-(11).
Таким образом, в предлагаемом способе ЦОИ на первом этапе работы осуществляет прием видеоизображений от нескольких ЛПС в заданных РМ точках зоны контроля совместно с информацией о их телеметрии, обнаружение и распознавание одиночных объектов и определение их уточненных координат без участия оператора. С этой целью на подготовительном этапе задают:
максимальное значение временного интервала  , отводимого на реализацию первого этапа работы;
, отводимого на реализацию первого этапа работы;
пороговый уровень ВКФ η1, на основании которого принимают решение при распознавании одиночных объектов.
Полностью не исключается участие оператора ЦОИ в процессе функционирования системы. Последний в состоянии контролировать качество выполняемой задачи. В отдельных случаях при работе с несколькими ЛПС в наиболее сложных условиях он может взять на себя управление процессами обнаружения и распознавания одиночных объектов в соответствии с алгоритмом, приведенном на фиг. 1, привлечь для решения поставленной задачи другие доступные виды мониторинга. При этом в качестве исходных данных на подготовительном этапе дополнительно задают:
ориентацию измерителей ИКМ и ЛМ относительно борта ЛПС  и
и  соответственно;
соответственно;
пороговые значения углов  ;
;
количество итераций при решении уравнения перехода от координат одиночного объекта в кадре  к вектору направления на него
к вектору направления на него  ;
;
число итераций расчета в алгоритме RANSAC.
Описание классов одиночных объектов по аналогии с ВОМ осуществляют с помощью комплексных вектор-контуров  и
и  соответственно. Алгоритм определения местоположения объектов и их распознавания аналогичен рассмотренному для ВОМ. Результаты КМ обрабатывают совместно с результатами других видов мониторинга по совпадающему алгоритму.
соответственно. Алгоритм определения местоположения объектов и их распознавания аналогичен рассмотренному для ВОМ. Результаты КМ обрабатывают совместно с результатами других видов мониторинга по совпадающему алгоритму.
При обнаружении объекта с помощью совокупности всех доступных видов мониторинга и невыполнении пороговых условий,  , принимают решение о обнаружении объекта не представляющего интереса. В случае необнаружения объекта за интервал времени τзад, принимают решение о прекращении дальнейших поисков. На выходной шине ЦОИ потребителям информации формируют сообщение о покидании объектом уточненного района. Качество операций, выполняемых на первом этапе, оказывает существенное влияние на вероятность правильного распознавания групповых объектов на втором этапе работы предлагаемого способа.
, принимают решение о обнаружении объекта не представляющего интереса. В случае необнаружения объекта за интервал времени τзад, принимают решение о прекращении дальнейших поисков. На выходной шине ЦОИ потребителям информации формируют сообщение о покидании объектом уточненного района. Качество операций, выполняемых на первом этапе, оказывает существенное влияние на вероятность правильного распознавания групповых объектов на втором этапе работы предлагаемого способа.
В случае обнаружения в одном позиционном районе нескольких одиночных объектов (второй этап работы) с координатами  ЦОИ принимает решение о обнаружении l-го группового объекта. Здесь i=1,2,…,I - координаты i-го одиночного объекта, s=1,2,…, S - класс одиночного объекта, S - количество классов одиночных объектов, I - класс группового объекта.
ЦОИ принимает решение о обнаружении l-го группового объекта. Здесь i=1,2,…,I - координаты i-го одиночного объекта, s=1,2,…, S - класс одиночного объекта, S - количество классов одиночных объектов, I - класс группового объекта.
На каждый l-й класс групповых объектов (ПУ войсками, УС ПУ и др.), l=1,2,…, L, на подготовительном этапе формируют вектор признаков  . Совокупность последних в качестве базы данных хранится на ЦОИ (см. фиг. 10, 11). В качестве признаков bl используют: количество и тип автомобильной и бронетехники в позиционном районе, количество прицепов, площадь позиционного района, удаление позиционного района от барьерного рубежа, взаимные расстояния между аналогичными групповыми объектами (позиционными районами), время пребывания в позиционном районе и др. Названные признаки групповых объектов задают раздельно для различных видов боевой деятельности (оборона, наступление).
. Совокупность последних в качестве базы данных хранится на ЦОИ (см. фиг. 10, 11). В качестве признаков bl используют: количество и тип автомобильной и бронетехники в позиционном районе, количество прицепов, площадь позиционного района, удаление позиционного района от барьерного рубежа, взаимные расстояния между аналогичными групповыми объектами (позиционными районами), время пребывания в позиционном районе и др. Названные признаки групповых объектов задают раздельно для различных видов боевой деятельности (оборона, наступление).
Кроме того, на подготовительном этапе задают:
максимальное значение временного интервала  , отводимого на реализацию второго этапа работы. При этом совокупность
, отводимого на реализацию второго этапа работы. При этом совокупность  должна быть намного меньше среднего времени пребывания объектов в одном позиционном районе;
должна быть намного меньше среднего времени пребывания объектов в одном позиционном районе;
пороговый уровень ВКФ η2, на основе которого принимают решение при распознавании групповых объектов.
В процессе анализа определяют площадь, занимаемую групповым объектом, координаты центра позиционного района методом разбиения (см. электронный ресурс sch156luz.mskobr.ru/files). удаление от барьерного рубежа, взаимные удаления от других известных групповых объектов и др. Так, на фиг. 12 а, б приведен один и тот же групповой объект (ОКП дивизии США), занимающий в зависимости от сложившейся ситуации один или несколько позиционных районов. В результате объект на фиг. 12 б представляет собой совокупность групповых объектов, что предполагает выполнение работ по вскрытию их взаимосвязанности в рамках дополнительного этапа.
Использование вектор-контуров для описания групповых объектов не целесообразно в связи с тем, что один и тот же групповой объект в зависимости от физико-географических, климатических и других условий имеет разную конфигурацию. На ее изменение так же накладывают свой отпечаток и изменения оперативной обстановки в зоне контроля, коррекция в силу разных причин штатной структуры объектов и др.
При обнаружении группового объекта (см. фиг. 12 а, б) средствами мониторинга на ЦОИ формируют вектор его признаков  согласованной с Bl размерностью. Сравнивают полученное значение Rm со всеми L хранящимися в базе данных эталонными значениями Bl, l=1,2,…,L, путем нахождения взаимно-корреляционной функции
согласованной с Bl размерностью. Сравнивают полученное значение Rm со всеми L хранящимися в базе данных эталонными значениями Bl, l=1,2,…,L, путем нахождения взаимно-корреляционной функции  . Определяют максимальное значение
. Определяют максимальное значение  и сравнивают его с порогом η2. При выполнении пороговых условий
и сравнивают его с порогом η2. При выполнении пороговых условий  принимают решение об обнаружении l-го группового объекта. В противном случае продолжают поиск, измерение и анализ характеристик недостающих одиночных объектов с привлечением других видов мониторинга, например, ВСМ.
принимают решение об обнаружении l-го группового объекта. В противном случае продолжают поиск, измерение и анализ характеристик недостающих одиночных объектов с привлечением других видов мониторинга, например, ВСМ.
Отображают полученные результаты в геоинформационной системе с использованием географических координат, времени измерений и типа объекта. На выходной информационной шине ЦОИ формируют сообщение о классе обнаруженного объекта, его уточненных (центральных) координатах, времени обнаружения.
При невыполнении пороговых условий  , и завершении временного интервала
, и завершении временного интервала  принимают решение о обнаружении группового объекта неустановленной принадлежности.
принимают решение о обнаружении группового объекта неустановленной принадлежности.
Выполнена оценка эффективности совместного использования различных видов мониторинга при распознавании как одиночных, так и групповых объектов. Последняя показала (см. Кузьмин В.В., Удальцов Н.П. Концептуальная модель комплексной обработки информации, добытой различными видами мониторинга. Труды 35-го межвузовского НТС «Повышение эффективности радиоэлектронного вооружения. Развитие транспортной базы». - СПб: МВАА, 2016. - С. 167-175.), что вероятность вскрытия (распознавания) основного командного пункта (ОКП) бронетанковой бригады ВС США за установленный интервал времени, равный периоду обновления обстановки, составляет:
радиомониторинг - 0,58;
космический мониторинг - 0,55;
воздушный мониторинг - 0,38;
мониторинг войсковой и специального назначения - 0,13.
Тогда, при условии независимости действий каждого из перечисленных видов мониторинга, вероятность распознавания данного группового объекта при комплексной обработке полученных измерений составит (см. Яглом A.M., Яглом И.М. Вероятность и информация. - М.: Гос. издательство физ.-мат. лит, 1960. - 275 с.):
где j - количество видов мониторинга.
Графическая интерпретация примера приведена на фиг. 13, подтверждающая положение теории распознавания образов. При стремлении количества признаков, описывающих объект к бесконечности, вероятность его распознавания стремится к единице. Однако, это справедливо при отсутствии погрешностей в измерениях. Кроме того, каждый признак однозначно характеризует объект на некотором интервале своих значений.
На фиг. 14 приведена зависимость вероятности распознавания объектов от количества признаков и погрешностей в измерениях их значений. Последняя свидетельствует о том, что использование недостоверных признаков приводит к резкому снижению вероятности распознавания групповых объектов.
Таким образом, предлагаемый способ обеспечивает:
обнаружение, определение координат и распознавание одиночных и групповых объектов в различных, включая неблагоприятные, условиях;
повышение вероятности правильного распознавания Ррас как одиночных, так и групповых объектов достигается за счет совместного использования результатов измерений доступных видов мониторинга;
эффективность предлагаемого способа, оцениваемая Ррас, во многом определяется качеством выполнения первого этапа (обнаружения, определения координат и распознавания одиночных объектов);
групповые объекты, как правило, имеют иерархическую структуру, что влечет за собой многоэтапную (более двух) обработку результатов мониторинга.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2014 |
|
RU2550811C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2012 |
|
RU2513900C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2011 |
|
RU2469408C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2465613C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2022 |
|
RU2812755C2 |
| Бортовая интеллектуальная система поиска и наведения беспилотного летательного аппарата | 2023 |
|
RU2819590C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2458360C1 |
| Разностно-дальномерный способ определения местоположения объектов | 2022 |
|
RU2790347C1 |
| Способ и устройство определения координат источников радиоизлучения | 2017 |
|
RU2659810C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |
Изобретение относится к способу определения координат объектов и их распознавания. Технический результат заключается в повышении точности обнаружения групповых объектов. В способе обеспечивается комплексное использование различных видов мониторинга на основе использования априорной информации об их структуре и топологии пространственного размещения в различных условиях боевой деятельности, при этом решение о принадлежности обнаруженного одиночного объекта к s-му классу принимают на основе сравнения его вектор-контура с S эталонными вектор-контурами с использованием максимального значения взаимно корреляционной функции (ВКФ), превысившей пороговое значение η1. В противном случае для обнаружения одиночного объекта дополнительно используют другие доступные виды мониторинга. Распознавание группового объекта осуществляют путем сравнения его вектора признаков с L эталонными вектор-признаками с использованием максимального значения ВКФ2. Решение в пользу l-го класса группового объекта принимают при выполнении пороговых условий max ВКФ2>η2. В противном случае с использованием средств доступных видов мониторинга в течение заданного интервала времени осуществляют дополнительный поиск одиночных объектов в уточненном районе и принимают окончательное решение. 14 ил.
Способ определения координат объектов и их распознавания, заключающийся в том, что на подготовительном этапе для ведения воздушного оптического мониторинга (ВОМ) на борт летно-подъемного средства (ЛПС) устанавливают и фиксируют видеокамеру для обзора нижней полусферы, запоминают коэффициенты дисторсии объектива видеокамеры, определяют ориентацию видеокамеры относительно борта ЛПС  , где kk, lk,
, где kk, lk,  - соответственно углы крена, тангажа и склонения видеокамеры, для каждого класса объектов формируют и запоминают набор эталонных вектор-контуров в совокупности с n первыми членами свертки ее автокорреляционной функции (АКФ), задают маршрут полета ЛПС, а в процессе полета на первом этапе работы постоянно через заданный интервал времени Δt определяют местоположение ЛПС
- соответственно углы крена, тангажа и склонения видеокамеры, для каждого класса объектов формируют и запоминают набор эталонных вектор-контуров в совокупности с n первыми членами свертки ее автокорреляционной функции (АКФ), задают маршрут полета ЛПС, а в процессе полета на первом этапе работы постоянно через заданный интервал времени Δt определяют местоположение ЛПС  , где
, где  - соответственно широта, долгота и высота ЛПС в ti-й момент времени, i=1, 2, …, I, и его пространственную ориентацию
- соответственно широта, долгота и высота ЛПС в ti-й момент времени, i=1, 2, …, I, и его пространственную ориентацию  , где
, где  - соответственно углы крена, тангажа и склонения ЛПС в ti-й момент времени, совместно запоминают навигационные и временные параметры ЛПС, а при обнаружении j-го одиночного объекта в момент времени ti определяют его местоположение на кадре видеокамеры, преобразуют координаты j-го одиночного объекта в кадре на вектор направления на него в системе координат видеокамеры
- соответственно углы крена, тангажа и склонения ЛПС в ti-й момент времени, совместно запоминают навигационные и временные параметры ЛПС, а при обнаружении j-го одиночного объекта в момент времени ti определяют его местоположение на кадре видеокамеры, преобразуют координаты j-го одиночного объекта в кадре на вектор направления на него в системе координат видеокамеры  с учетом влияния на результаты измерений дисторсии объектива, переводят координаты ЛПС в геоцентрическую систему координат
с учетом влияния на результаты измерений дисторсии объектива, переводят координаты ЛПС в геоцентрическую систему координат  корректируют вектор направления на j-й одиночный объект
корректируют вектор направления на j-й одиночный объект  с учетом априорно известной ориентации видеокамеры относительно борта ЛПС путем последовательного умножения значений на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления
с учетом априорно известной ориентации видеокамеры относительно борта ЛПС путем последовательного умножения значений на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления  на j-й одиночный объект с учетом измеренных в момент времени ti пространственных углов ЛПС: крена
на j-й одиночный объект с учетом измеренных в момент времени ti пространственных углов ЛПС: крена  , тангажа
, тангажа  и склонения
и склонения  , определяют уточненные значения азимута
, определяют уточненные значения азимута  , угла места
, угла места  и удаление ЛПС, находящегося в момент времени ti на высоте
и удаление ЛПС, находящегося в момент времени ti на высоте  от j-го одиночного объекта
от j-го одиночного объекта  , расположенного на поверхности «круглой» Земли, в геоцентрической системе координат определяют значение истинного вектора направления на j-й одиночный объект
, расположенного на поверхности «круглой» Земли, в геоцентрической системе координат определяют значение истинного вектора направления на j-й одиночный объект  , зависящее от широты Blps и долготы Llps местоположения ЛПС, определяют координаты точки пересечения вектора с «круглой» Землей
, зависящее от широты Blps и долготы Llps местоположения ЛПС, определяют координаты точки пересечения вектора с «круглой» Землей  , преобразуют геоцентрические координаты j-го одиночного объекта в географические
, преобразуют геоцентрические координаты j-го одиночного объекта в географические  , где Bj и Lj соответственно широта и долгота местоположения j-го одиночного объекта, при наличии k последовательных кадров, k=1, 2, …, K, с изображением j-го одиночного объекта выполняют n циклов измерений географических координат
, где Bj и Lj соответственно широта и долгота местоположения j-го одиночного объекта, при наличии k последовательных кадров, k=1, 2, …, K, с изображением j-го одиночного объекта выполняют n циклов измерений географических координат  , результаты измерений усредняют, а при наличии цифровой карты местности района измерений, представляющей собой матрицу с дискретностью по координатам района измерений с соответствующими значениями высот рельефа, уточняют географические координаты обнаруженного j-го одиночного объекта
, результаты измерений усредняют, а при наличии цифровой карты местности района измерений, представляющей собой матрицу с дискретностью по координатам района измерений с соответствующими значениями высот рельефа, уточняют географические координаты обнаруженного j-го одиночного объекта  , для распознавания обнаруженных одиночных объектов и принятия решения на их местоопределение находят вектор-контур обнаруженного объекта и первые n элементов вейвлетной свертки АКФ, сравнивают их с n первыми элементами сверток АКФ эталонных вектор-контуров, определяют и выделяют эталонные вектор-контуры с минимальными отличиями от обнаруженного вектор-контура, определяют значения взаимно корреляционных функций (ВКФ) для выделенных эталонных вектор-контуров и обнаруженного вектор-контура, сравнивают полученные значения ВКФ с заданным порогом η1, а при выполнении пороговых условий определяют эталонный вектор-контур с наибольшим значением ВКФ, принимают решение об обнаружении и идентификации одиночного объекта, соответствующего эталону с максимальным значением ВКФ, определяют координаты центра обнаруженного и идентифицированного одиночного объекта на кадре и формируют команду на его местоопределение, а в качестве выходных формируют данные о типе одиночного объекта, его географических координатах и времени измерения, отличающийся тем, что одновременно с воздушным оптическим мониторингом дополнительно используют результаты других доступных видов мониторинга: войскового и специального мониторинга (ВСМ), радиомониторинга (РМ) и радиотехнического мониторинга (РТМ), космического мониторинга (КМ), звукового и светового мониторинга (ЗСМ), и инфракрасного мониторинга (ИКМ), предназначенные для обнаружения и определения координат одиночных и групповых объектов, формируют центр обработки информации (ЦОИ), предназначенный для управления совместной работой всех видов мониторинга, распознавания одиночных и групповых объектов на основе передаваемых на него результатов измерений от всех видов мониторинга, для этого на подготовительном этапе для каждого класса одиночных и групповых объектов и каждого вида мониторинга формируют и запоминают набор эталонных параметров для различных видов боевой деятельности, задают границы зоны контроля и его физико-географические условия, положение барьерного рубежа, а в процессе работы с помощью средств РМ определяют предварительное местоположение объекта на основе координат (xi, yi) обслуживающего его радиоэлектронного устройства, на основе которых ЦОИ уточняет маршрут полета одного из находящихся под его управлением ЛПС, осуществляющих ВОМ, с учетом прохождения линии барьерного рубежа, с борта ЛПС на ЦОИ транслируют видеокадры из уточненного района зоны контроля с центром (xi, yi), с помощью которых на ЦОИ обнаруживают и определяют местоположение одиночного объекта, а с помощью сравнения эталонных вектор-контуров с вектор-контуром обнаруженного объекта определяют его принадлежность к s-му классу одиночных объектов, s=1,2,…,S, S - количество классов одиночных объектов, а на втором этапе работы при обнаружении нескольких одиночных объектов в одном позиционном районе принимают решение о обнаружении группового объекта, определяют занимаемую площадь и координаты центра группового объекта и его принадлежность к l-му классу групповых объектов, l=1, 2, …, L, L - количество классов групповых объектов, на основе сравнения эталонных вектор-признаков, хранящихся в базе данных ЦОИ, с вектор-признаками обнаруженного группового объекта путем нахождения ВКФ с максимальным значением, превысившим пороговый уровень η2, отображают полученные результаты в геоинформационной системе о типе объекта, его географических координатах и времени измерения, в случае необнаружения в уточненном районе одиночного объекта продолжают его поиск и анализ с использованием других доступных видов мониторинга на протяжении заданного на первый этап интервала времени
, для распознавания обнаруженных одиночных объектов и принятия решения на их местоопределение находят вектор-контур обнаруженного объекта и первые n элементов вейвлетной свертки АКФ, сравнивают их с n первыми элементами сверток АКФ эталонных вектор-контуров, определяют и выделяют эталонные вектор-контуры с минимальными отличиями от обнаруженного вектор-контура, определяют значения взаимно корреляционных функций (ВКФ) для выделенных эталонных вектор-контуров и обнаруженного вектор-контура, сравнивают полученные значения ВКФ с заданным порогом η1, а при выполнении пороговых условий определяют эталонный вектор-контур с наибольшим значением ВКФ, принимают решение об обнаружении и идентификации одиночного объекта, соответствующего эталону с максимальным значением ВКФ, определяют координаты центра обнаруженного и идентифицированного одиночного объекта на кадре и формируют команду на его местоопределение, а в качестве выходных формируют данные о типе одиночного объекта, его географических координатах и времени измерения, отличающийся тем, что одновременно с воздушным оптическим мониторингом дополнительно используют результаты других доступных видов мониторинга: войскового и специального мониторинга (ВСМ), радиомониторинга (РМ) и радиотехнического мониторинга (РТМ), космического мониторинга (КМ), звукового и светового мониторинга (ЗСМ), и инфракрасного мониторинга (ИКМ), предназначенные для обнаружения и определения координат одиночных и групповых объектов, формируют центр обработки информации (ЦОИ), предназначенный для управления совместной работой всех видов мониторинга, распознавания одиночных и групповых объектов на основе передаваемых на него результатов измерений от всех видов мониторинга, для этого на подготовительном этапе для каждого класса одиночных и групповых объектов и каждого вида мониторинга формируют и запоминают набор эталонных параметров для различных видов боевой деятельности, задают границы зоны контроля и его физико-географические условия, положение барьерного рубежа, а в процессе работы с помощью средств РМ определяют предварительное местоположение объекта на основе координат (xi, yi) обслуживающего его радиоэлектронного устройства, на основе которых ЦОИ уточняет маршрут полета одного из находящихся под его управлением ЛПС, осуществляющих ВОМ, с учетом прохождения линии барьерного рубежа, с борта ЛПС на ЦОИ транслируют видеокадры из уточненного района зоны контроля с центром (xi, yi), с помощью которых на ЦОИ обнаруживают и определяют местоположение одиночного объекта, а с помощью сравнения эталонных вектор-контуров с вектор-контуром обнаруженного объекта определяют его принадлежность к s-му классу одиночных объектов, s=1,2,…,S, S - количество классов одиночных объектов, а на втором этапе работы при обнаружении нескольких одиночных объектов в одном позиционном районе принимают решение о обнаружении группового объекта, определяют занимаемую площадь и координаты центра группового объекта и его принадлежность к l-му классу групповых объектов, l=1, 2, …, L, L - количество классов групповых объектов, на основе сравнения эталонных вектор-признаков, хранящихся в базе данных ЦОИ, с вектор-признаками обнаруженного группового объекта путем нахождения ВКФ с максимальным значением, превысившим пороговый уровень η2, отображают полученные результаты в геоинформационной системе о типе объекта, его географических координатах и времени измерения, в случае необнаружения в уточненном районе одиночного объекта продолжают его поиск и анализ с использованием других доступных видов мониторинга на протяжении заданного на первый этап интервала времени  , при обнаружении объекта и невыполнении пороговых условий
, при обнаружении объекта и невыполнении пороговых условий  принимают решение о обнаружении объекта, не представляющего интерес, и прекращают дальнейший его анализ и определение уточненных координат, а в случае необнаружения объекта за интервал времени принимают решение о покидании им уточненного района и прекращении дальнейших поисков, в случае невыполнения пороговых условий на втором этапе работы продолжают поиск и анализ недостающих элементов группового объекта с использованием для этого результатов измерений других доступных видов мониторинга, при этом результаты измерений различных видов мониторинга в виде вектор-признаков сравнивают с соответствующими эталонными векторами одиночных и групповых объектов до момента их обнаружения и распознавания, определения уточненных координат, если на протяжении заданного интервала времени
принимают решение о обнаружении объекта, не представляющего интерес, и прекращают дальнейший его анализ и определение уточненных координат, а в случае необнаружения объекта за интервал времени принимают решение о покидании им уточненного района и прекращении дальнейших поисков, в случае невыполнения пороговых условий на втором этапе работы продолжают поиск и анализ недостающих элементов группового объекта с использованием для этого результатов измерений других доступных видов мониторинга, при этом результаты измерений различных видов мониторинга в виде вектор-признаков сравнивают с соответствующими эталонными векторами одиночных и групповых объектов до момента их обнаружения и распознавания, определения уточненных координат, если на протяжении заданного интервала времени  на втором этапе работы распознать объект не удалось,
на втором этапе работы распознать объект не удалось,  , принимают решение о обнаружении группового объекта неустановленной принадлежности.
, принимают решение о обнаружении группового объекта неустановленной принадлежности.
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2014 |
|
RU2550811C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2012 |
|
RU2513900C1 |
| Способ и устройство определения координат источников радиоизлучения | 2018 |
|
RU2700767C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2465613C1 |
| СИСТЕМА НАБЛЮДЕНИЯ ЗА ЗЕМНОЙ ПОВЕРХНОСТЬЮ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2323851C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА И ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2251712C1 |
| СПОСОБ ПАССИВНОГО НЕСКАНИРУЮЩЕГО МУЛЬТИСПЕКТРАЛЬНОГО ВСЕАЗИМУТАЛЬНОГО ОПРЕДЕЛЕНИЯ ПЕЛЕНГОВ И/ИЛИ КООРДИНАТ И ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 1999 |
|
RU2154284C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2009 |
|
RU2427000C1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |

