Изобретение относится к области автоматизации информационно-управляющих систем радиомониторинга (РМ), функционирующих в реальном масштабе времени, и может быть использовано для обработки результатов радиомониторинга в сложной электромагнитной обстановке.
Известен способ обеспечения электромагнитной совместимости систем связи, описанный в Пат. РФ №2271067, МПК G01S 13/46, опубликованный 27.12.1998 г. Он заключается в идентификации групп конкретных передатчиков, которые могут работать одновременно на заданном частотном канале из диапазона рабочих частот с заданными параметрами излучаемых радиосигналов, обеспечивающих радиопокрытие обслуживаемой территории, не оказывая недопустимого воздействия на приемники других радиоэлектронных средств.
Способ-аналог обладает недостатками, связанными с отсутствием возможности идентификации объектов в заданном районе (обслуживаемой территории), включая радиоэлектронные средства (РЭС) с различными параметрами излучаемых радиосигналов, что в конечном счете не позволяет оценить общую радиоэлектронную и оперативную обстановку.
Известен способ оценки эффективности процесса разработки объектов военной техники, описанный в Пат. РФ №2282243, МПК G06T 17/50, G06N 5/50, опубл. 20.08.2006 г., бюл. №23. Он включает на подготовительном этапе формирование базы данных в составе первого массива с данными о физико-географических условиях заданного района, формирование компьютерных моделей объектов и занесении их в базу данных в виде второго массива данных:  - физических параметров объектов i-го типа, i=1, 2, …, I, фото или радиолокационных снимков Phi, формирование третьего массива данных с потенциальными данными об их пространственно-временных и количественных характеристиках и о технико-экономических показателях их работы, отображение полученной модели, а в процессе работы на основе полученных данных определение значения показателей боевого воздействия каждого объекта, задание цветовой шкалы преобразования показателей боевого воздействия, функционирования и представления каждой модели объекта в изображение, отображение данных об объектах в виде табличного и/или графического представления, выделение из второго и третьего массивов данных объектов, которые относят соответственно к первому и второму участникам военных действий, формирование на основе последних четвертого и пятого массивов данных, воспроизведение этапов итерационного процесса боевого взаимодействия моделей участников военных действий и отображения его на экране компьютера, при этом на каждом этапе этого процесса осуществляют формирование области боевого взаимодействия каждого объекта для каждого участника военных действий, анализ наличия совпадений сформированных областей цветокодовых изображений первой и второй моделей участников военных действий, при этом совпадения принимают за факт попадания в цель, фиксирование наличия и отсутствия попаданий, по которым оценивают результативность соответствующих объектов, занесение в базу данных пространственно-временных и количественных показателей объектов с полученной результативностью для каждого участника военных действий, формирование шестого массива данных на основе полученных результатов, отображение полученных результатов в виде диаграмм и ранжировка по убыванию результативности пространственно-временных и количественных показателей объектов, содержащихся в шестом массиве, выделение групп объектов, характеристики которых соответствуют заданным условиям выбора, из которых формируют седьмой массив данных, занесение в последний данных о технико-экономических показателях разработки соответствующих объектов, формирование восьмого массива данных об экономических показателях разработки выделенной группы объектов.
- физических параметров объектов i-го типа, i=1, 2, …, I, фото или радиолокационных снимков Phi, формирование третьего массива данных с потенциальными данными об их пространственно-временных и количественных характеристиках и о технико-экономических показателях их работы, отображение полученной модели, а в процессе работы на основе полученных данных определение значения показателей боевого воздействия каждого объекта, задание цветовой шкалы преобразования показателей боевого воздействия, функционирования и представления каждой модели объекта в изображение, отображение данных об объектах в виде табличного и/или графического представления, выделение из второго и третьего массивов данных объектов, которые относят соответственно к первому и второму участникам военных действий, формирование на основе последних четвертого и пятого массивов данных, воспроизведение этапов итерационного процесса боевого взаимодействия моделей участников военных действий и отображения его на экране компьютера, при этом на каждом этапе этого процесса осуществляют формирование области боевого взаимодействия каждого объекта для каждого участника военных действий, анализ наличия совпадений сформированных областей цветокодовых изображений первой и второй моделей участников военных действий, при этом совпадения принимают за факт попадания в цель, фиксирование наличия и отсутствия попаданий, по которым оценивают результативность соответствующих объектов, занесение в базу данных пространственно-временных и количественных показателей объектов с полученной результативностью для каждого участника военных действий, формирование шестого массива данных на основе полученных результатов, отображение полученных результатов в виде диаграмм и ранжировка по убыванию результативности пространственно-временных и количественных показателей объектов, содержащихся в шестом массиве, выделение групп объектов, характеристики которых соответствуют заданным условиям выбора, из которых формируют седьмой массив данных, занесение в последний данных о технико-экономических показателях разработки соответствующих объектов, формирование восьмого массива данных об экономических показателях разработки выделенной группы объектов.
Способ-аналог позволяет моделировать процесс ведения военных действий на основе компьютерных моделей объектов военной техники.
Однако, аналог обладает недостатками, ограничивающими его применение в области обработки результатов радиомониторинга. К их числу можно отнести:
отсутствует учет функционирующих РЭС, размещенных на объектах военной техники или работающей в их интересах;
не выполняется оценка электромагнитной доступности (ЭМД) к РЭС объектов;
отсутствует оценка текущей электромагнитной обстановки (ЭМО) в районе ведения радиомониторинга (РМ), формирование выводов по ней;
тип объектов по результатам РМ не определяется;
отсутствуют выводы о складывающейся оперативной обстановке (ОО) в заданном районе;
не осуществляется формирование полученных данных потребителям информации в формализованном виде о составе, состоянии и деятельности объектов в заданном районе на фоне карт геоинформационных систем (ГИС).
Наиболее близким по своей технической сущности является способ обработки результатов радиомониторинга, описанный в патенте РФ №2659486, МПК G06T 1/00 (2006.01), опубл. 02.07.2018, бюл. №19. Он включает на подготовительном этапе формирование базы данных в составе первого массива с данными о физико-географических условиях заданного района, формирование компьютерных моделей объектов и занесение их в базу данных в виде второго массива данных, содержащего физические параметры объекта  i-го типа, i=1, 2, …, I, фото или радиолокационный снимок Phi, формирование третьего массива данных с потенциальными сведениями об их пространственно-временных и количественных характеристиках, общей площади заданного района S, площади элементарного участка Si, удовлетворяющего требованиям по размещению i-го объекта или его элемента, удалению каждого i-го объекта от барьерного рубежа Li для различных оперативных условий, взаимном расстоянии между i-м и j-м объектами Dij, формирование четвертого массива данных с параметрами РЭС: Δƒ, V, Tu, modeλ, τсп, τти, где Δƒ - диапазон рабочих частот, V - вид передачи, Tu - тип РЭС, u=1, 2, … U, modeλ - режим функционирования РЭС, λ=1, 2, …, Λ; τсп - среднее время работы РЭС при выходе в эфир, τти - интервал времени пребывания u-го РЭС на одной позиции, пятого массива данных с параметрами узлов связи (УС) пунктов управления (ПУ): количеством n РЭС различных типов Tип, n=1, 2, …, N, размерами необходимой площади для их развертывания Sr, Sr=n⋅Si, шестого массива данных с оперативно-тактическими нормативами по размещению УС на местности: удалением УС от соответствующих ПУ dn и барьерного рубежа Ln, взаимным удалением УС ПУ одного
i-го типа, i=1, 2, …, I, фото или радиолокационный снимок Phi, формирование третьего массива данных с потенциальными сведениями об их пространственно-временных и количественных характеристиках, общей площади заданного района S, площади элементарного участка Si, удовлетворяющего требованиям по размещению i-го объекта или его элемента, удалению каждого i-го объекта от барьерного рубежа Li для различных оперативных условий, взаимном расстоянии между i-м и j-м объектами Dij, формирование четвертого массива данных с параметрами РЭС: Δƒ, V, Tu, modeλ, τсп, τти, где Δƒ - диапазон рабочих частот, V - вид передачи, Tu - тип РЭС, u=1, 2, … U, modeλ - режим функционирования РЭС, λ=1, 2, …, Λ; τсп - среднее время работы РЭС при выходе в эфир, τти - интервал времени пребывания u-го РЭС на одной позиции, пятого массива данных с параметрами узлов связи (УС) пунктов управления (ПУ): количеством n РЭС различных типов Tип, n=1, 2, …, N, размерами необходимой площади для их развертывания Sr, Sr=n⋅Si, шестого массива данных с оперативно-тактическими нормативами по размещению УС на местности: удалением УС от соответствующих ПУ dn и барьерного рубежа Ln, взаимным удалением УС ПУ одного  и различных
и различных  уровней управления, временем пребывания УС на одной позиции Tти, и седьмого массива данных с Н эталонными описаниями различных вариантов оперативной и соответствующих им вариантов ЭМО, а в процессе работы оценивание электромагнитной доступности РЭС УС ПУ объектов РМ, сведения о которой записывают в восьмой массив данных, оценивание с учетом всех восьми массивов базы данных текущей ЭМО, формирование девятого массива данных с результатами оценки ЭМО в заданном районе с учетом ЭМД РЭС узлов связи ПУ: ƒm, (х,у)m, Vm, CSm, Tm, modem,
уровней управления, временем пребывания УС на одной позиции Tти, и седьмого массива данных с Н эталонными описаниями различных вариантов оперативной и соответствующих им вариантов ЭМО, а в процессе работы оценивание электромагнитной доступности РЭС УС ПУ объектов РМ, сведения о которой записывают в восьмой массив данных, оценивание с учетом всех восьми массивов базы данных текущей ЭМО, формирование девятого массива данных с результатами оценки ЭМО в заданном районе с учетом ЭМД РЭС узлов связи ПУ: ƒm, (х,у)m, Vm, CSm, Tm, modem,  ,
,  , dlj, где ƒm - рабочая частота обнаруженного излучения РЭС, (х,у)m - координаты РЭС, работающего на m-й частоте, Vm - вид принятого на ней сигнала, CSm - позывной работающего РЭС, Tm - идентификационный тип РЭС, modem - режим функционирования РЭС на m-й частоте,
, dlj, где ƒm - рабочая частота обнаруженного излучения РЭС, (х,у)m - координаты РЭС, работающего на m-й частоте, Vm - вид принятого на ней сигнала, CSm - позывной работающего РЭС, Tm - идентификационный тип РЭС, modem - режим функционирования РЭС на m-й частоте,  - время работы РЭС;
- время работы РЭС;  - время пребывания РЭС на одной позиции, dlj - взаимное удаление l-го и j-го РЭС, работающих в одной радиосети, уточнение местоположения обнаруженных РЭС с учетом пригодности элементарных участков Si к их развертыванию, отображение полученных результатов в ГИС, определение по результатам оценки ЭМО локальных объединений РЭС, образующих УС ПУ, уточнение их местоположения с учетом пригодности участков Sr к их развертыванию, и локальных объединений анализируемых объектов, образованных совокупностью УС ПУ отдельных частей, соединений и объединений, регистрация результатов анализа ЭМО в десятом массиве данных, сравнение полученных результатов текущей ЭМО с ее эталонными моделями, хранящимися в седьмом массиве данных, принятие решения о сложившейся оперативной обстановке и вероятном местоположении оцениваемых объектов и их состоянии, при совпадении с заданной точностью текущей оценки ЭМО с описанием одной из эталонных моделей ЭМО, регистрация результатов оценки оперативной и электромагнитной обстановки в одиннадцатом массиве данных, формирование на их основе двенадцатого массива данных с формализованными данными об оперативной и электромагнитной обстановке в заданном районе для потребителей информации, которую представляют на электронной карте ГИС, продолжение оценки текущей электромагнитной обстановки при невыполнении пороговых условий, использование информации об объектах и их состоянии из десятого массива данных для формирования одиннадцатого массива данных.
- время пребывания РЭС на одной позиции, dlj - взаимное удаление l-го и j-го РЭС, работающих в одной радиосети, уточнение местоположения обнаруженных РЭС с учетом пригодности элементарных участков Si к их развертыванию, отображение полученных результатов в ГИС, определение по результатам оценки ЭМО локальных объединений РЭС, образующих УС ПУ, уточнение их местоположения с учетом пригодности участков Sr к их развертыванию, и локальных объединений анализируемых объектов, образованных совокупностью УС ПУ отдельных частей, соединений и объединений, регистрация результатов анализа ЭМО в десятом массиве данных, сравнение полученных результатов текущей ЭМО с ее эталонными моделями, хранящимися в седьмом массиве данных, принятие решения о сложившейся оперативной обстановке и вероятном местоположении оцениваемых объектов и их состоянии, при совпадении с заданной точностью текущей оценки ЭМО с описанием одной из эталонных моделей ЭМО, регистрация результатов оценки оперативной и электромагнитной обстановки в одиннадцатом массиве данных, формирование на их основе двенадцатого массива данных с формализованными данными об оперативной и электромагнитной обстановке в заданном районе для потребителей информации, которую представляют на электронной карте ГИС, продолжение оценки текущей электромагнитной обстановки при невыполнении пороговых условий, использование информации об объектах и их состоянии из десятого массива данных для формирования одиннадцатого массива данных.
Способ-прототип обеспечивает принятие решения в автоматизированном режиме об оперативной обстановке в заданном районе, составе, состоянии и функционировании объектов на основе структурно-статистического анализа и априорных сведений, хранящихся в базе данных, результатов моделирования и анализа текущей электромагнитной обстановки.
Однако прототипу присущи недостатки, ограничивающие его применение. К их числу можно отнести:
в базе данных не учитывается старение информации о местоположении РЭС, объектов радиомониторинга;
не выполняется проверка существенности изменений, вносимых поступающими вектор-реализациями входного потока, в предметную область. Вследствие этого сложный алгоритм оценки оперативной обстановке на основе локализации РЭС выполняется в каждом цикле;
отсутствует согласование интенсивности обработки с интенсивностью входного потока, длиной очереди, что приводит к несвоевременности принятия решений.
Целью заявляемого изобретения является разработка способа обработки результатов радиомониторинга, обеспечивающего повышение скорости обработки входных данных за счет выстраивания требуемой последовательности этапов обработки на основе определения существенности изменений, вносимых вектор-реализациями входного потока данных, своевременной коррекции хранящейся в базе данных информации с учетом времени ее старения.
Поставленная цель достигается тем, что на подготовительном этапе формируют базу данных в составе первого массива с данными о физико-географических условиях заданного района, формируют компьютерные модели объектов и заносят их в базу данных в виде второго массива данных, содержащего физические параметры объекта  i-го типа, i=1, 2, …, I, фото или радиолокационный снимок Phi, формируют третий массив данных с потенциальными сведениями об их пространственно-временных и количественных характеристиках, общей площади заданного района S, площади элементарного участка Si, удовлетворяющего требованиям по размещению i-го объекта или его элемента, удалению каждого i-го объекта от барьерного рубежа Li для различных оперативных условий, взаимном расстоянии между i-м и j-м объектами dij, формируют четвертый массив данных с параметрами радиоэлектронных средств: Δƒ, V, Tu, modeλ, τсп, τти, где Δƒ - диапазон рабочих частот, V - вид передачи, Tu - тип РЭС, u=1, 2, … U, modeλ - режим функционирования РЭС, λ=1, 2, …, Λ; τсп - среднее время работы РЭС при выходе в эфир, τти - интервал времени пребывания u-го РЭС на одной позиции, пятый массив данных с параметрами узлов связи пунктов управления: количеством n РЭС различных типов Tип, n=1, 2, …, N, размерами необходимой площади для их развертывания Sr, Sr=n⋅Si, шестой массив данных с оперативно-тактическими нормативами по размещению УС на местности: удалением УС от соответствующих ПУ dn и барьерного рубежа Ln, взаимным удалением УС ПУ одного
i-го типа, i=1, 2, …, I, фото или радиолокационный снимок Phi, формируют третий массив данных с потенциальными сведениями об их пространственно-временных и количественных характеристиках, общей площади заданного района S, площади элементарного участка Si, удовлетворяющего требованиям по размещению i-го объекта или его элемента, удалению каждого i-го объекта от барьерного рубежа Li для различных оперативных условий, взаимном расстоянии между i-м и j-м объектами dij, формируют четвертый массив данных с параметрами радиоэлектронных средств: Δƒ, V, Tu, modeλ, τсп, τти, где Δƒ - диапазон рабочих частот, V - вид передачи, Tu - тип РЭС, u=1, 2, … U, modeλ - режим функционирования РЭС, λ=1, 2, …, Λ; τсп - среднее время работы РЭС при выходе в эфир, τти - интервал времени пребывания u-го РЭС на одной позиции, пятый массив данных с параметрами узлов связи пунктов управления: количеством n РЭС различных типов Tип, n=1, 2, …, N, размерами необходимой площади для их развертывания Sr, Sr=n⋅Si, шестой массив данных с оперативно-тактическими нормативами по размещению УС на местности: удалением УС от соответствующих ПУ dn и барьерного рубежа Ln, взаимным удалением УС ПУ одного  и различных
и различных  уровней управления, временем пребывания УС на одной позиции Тти, и седьмой массив данных с Н эталонными описаниями различных вариантов оперативной и соответствующих им вариантов электромагнитной обстановки, а в процессе работы оценивают электромагнитную доступность РЭС объектов РМ, сведения о которой записывают в восьмой массив данных, а с учетом всех восьми массивов базы данных оценивают текущую ЭМО, формируют девятый массив данных с результатами оценки ЭМО в заданном районе с учетом ЭМД РЭС узлов связи ПУ: ƒm, tm, (x,y)m, Vm, CSm, Tm, modem,
уровней управления, временем пребывания УС на одной позиции Тти, и седьмой массив данных с Н эталонными описаниями различных вариантов оперативной и соответствующих им вариантов электромагнитной обстановки, а в процессе работы оценивают электромагнитную доступность РЭС объектов РМ, сведения о которой записывают в восьмой массив данных, а с учетом всех восьми массивов базы данных оценивают текущую ЭМО, формируют девятый массив данных с результатами оценки ЭМО в заданном районе с учетом ЭМД РЭС узлов связи ПУ: ƒm, tm, (x,y)m, Vm, CSm, Tm, modem,  ,
,  , dlj, где ƒm - рабочая частота обнаруженного излучения РЭС, tm - дата и время обнаружения m-го РЭС, (х,у)m - координаты РЭС, работающего на m-й частоте, Vm - вид принятого на ней сигнала, CSm - позывной работающего РЭС, Tm - идентификационный тип РЭС, modem - режим функционирования РЭС на m-й частоте,
, dlj, где ƒm - рабочая частота обнаруженного излучения РЭС, tm - дата и время обнаружения m-го РЭС, (х,у)m - координаты РЭС, работающего на m-й частоте, Vm - вид принятого на ней сигнала, CSm - позывной работающего РЭС, Tm - идентификационный тип РЭС, modem - режим функционирования РЭС на m-й частоте,  - время работы РЭС;
- время работы РЭС;  - время пребывания РЭС на одной позиции, dlj - взаимное удаление l-го и j-го РЭС, работающих в одной радиосети, уточняют местоположение обнаруженных РЭС с учетом пригодности элементарных участков Si к их развертыванию, отображают полученные результаты в геоинформационной системе, по результатам оценки ЭМО определяют локальные объединения РЭС, образующие УС ПУ, уточняют их местоположение с учетом пригодности участков Sr к их развертыванию, и локальные объединения анализируемых объектов, образованные совокупностью УС ПУ отдельных частей, соединений и объединений, а результаты анализа ЭМО записывают в десятый массив данных, сравнивают полученные результаты текущей ЭМО с ее эталонными моделями, хранящимися в седьмом массиве данных, при совпадении с заданной точностью текущей оценки ЭМО с описанием одной из эталонных моделей ЭМО, принимают решение о сложившейся оперативной обстановке и вероятном местоположении оцениваемых объектов и их состоянии, а результаты оценки оперативной и электромагнитной обстановки записывают в одиннадцатый массив данных, на основе которых далее формируют двенадцатый массив данных с формализованными данными об оперативной и электромагнитной обстановке в заданном районе для потребителей информации, которую представляют на электронной карте ГИС, в противном случае при невыполнении пороговых условий продолжают оценку текущей электромагнитной обстановки, а информацию об объектах и их состоянии из десятого массива данных используют для формирования одиннадцатого массива данных, анализ входного потока параметров радиоизлучений осуществляют на основе динамической таксономии путем проверки наличия в девятом массиве данных о предыдущих излучениях этого РЭС, полученных в результате завершенных циклов обработки, при наличии данных, зарегистрированных в пределах времени упреждения смены местоположения объекта РМ, на котором размещено РЭС, обновляют время его регистрации, а дальнейшую обработку полученных данных на основе формирования локальностей РЭС не проводят, сведения о параметрах и времени работы РЭС, подтверждающие факт функционирования объекта РМ, на котором оно размещается, используют для формирования выводов по оценке ЭМО и ОО и записывают в одиннадцатый массив данных.
- время пребывания РЭС на одной позиции, dlj - взаимное удаление l-го и j-го РЭС, работающих в одной радиосети, уточняют местоположение обнаруженных РЭС с учетом пригодности элементарных участков Si к их развертыванию, отображают полученные результаты в геоинформационной системе, по результатам оценки ЭМО определяют локальные объединения РЭС, образующие УС ПУ, уточняют их местоположение с учетом пригодности участков Sr к их развертыванию, и локальные объединения анализируемых объектов, образованные совокупностью УС ПУ отдельных частей, соединений и объединений, а результаты анализа ЭМО записывают в десятый массив данных, сравнивают полученные результаты текущей ЭМО с ее эталонными моделями, хранящимися в седьмом массиве данных, при совпадении с заданной точностью текущей оценки ЭМО с описанием одной из эталонных моделей ЭМО, принимают решение о сложившейся оперативной обстановке и вероятном местоположении оцениваемых объектов и их состоянии, а результаты оценки оперативной и электромагнитной обстановки записывают в одиннадцатый массив данных, на основе которых далее формируют двенадцатый массив данных с формализованными данными об оперативной и электромагнитной обстановке в заданном районе для потребителей информации, которую представляют на электронной карте ГИС, в противном случае при невыполнении пороговых условий продолжают оценку текущей электромагнитной обстановки, а информацию об объектах и их состоянии из десятого массива данных используют для формирования одиннадцатого массива данных, анализ входного потока параметров радиоизлучений осуществляют на основе динамической таксономии путем проверки наличия в девятом массиве данных о предыдущих излучениях этого РЭС, полученных в результате завершенных циклов обработки, при наличии данных, зарегистрированных в пределах времени упреждения смены местоположения объекта РМ, на котором размещено РЭС, обновляют время его регистрации, а дальнейшую обработку полученных данных на основе формирования локальностей РЭС не проводят, сведения о параметрах и времени работы РЭС, подтверждающие факт функционирования объекта РМ, на котором оно размещается, используют для формирования выводов по оценке ЭМО и ОО и записывают в одиннадцатый массив данных.
При этом на подготовительном этапе для формирования первого массива данных строят геопространственную модель заданного района местности, учитывающую его тактические свойства, позволяющую определить пригодность элементарных участков района для объектов радиомониторинга с различными требованиями к размещению.
Благодаря новой совокупности существенных признаков в заявляемом способе за счет учета результатов предыдущих циклов обработки, времени старения информации и принятия на их основе решения о целесообразности выполнения полной совокупности процедур анализа поступивших данных появляется возможность повысить скорость обработки входного потока данных без накладывания ограничений на ее достоверность и полноту.
Заявленный способ поясняется чертежами, на которых показаны:
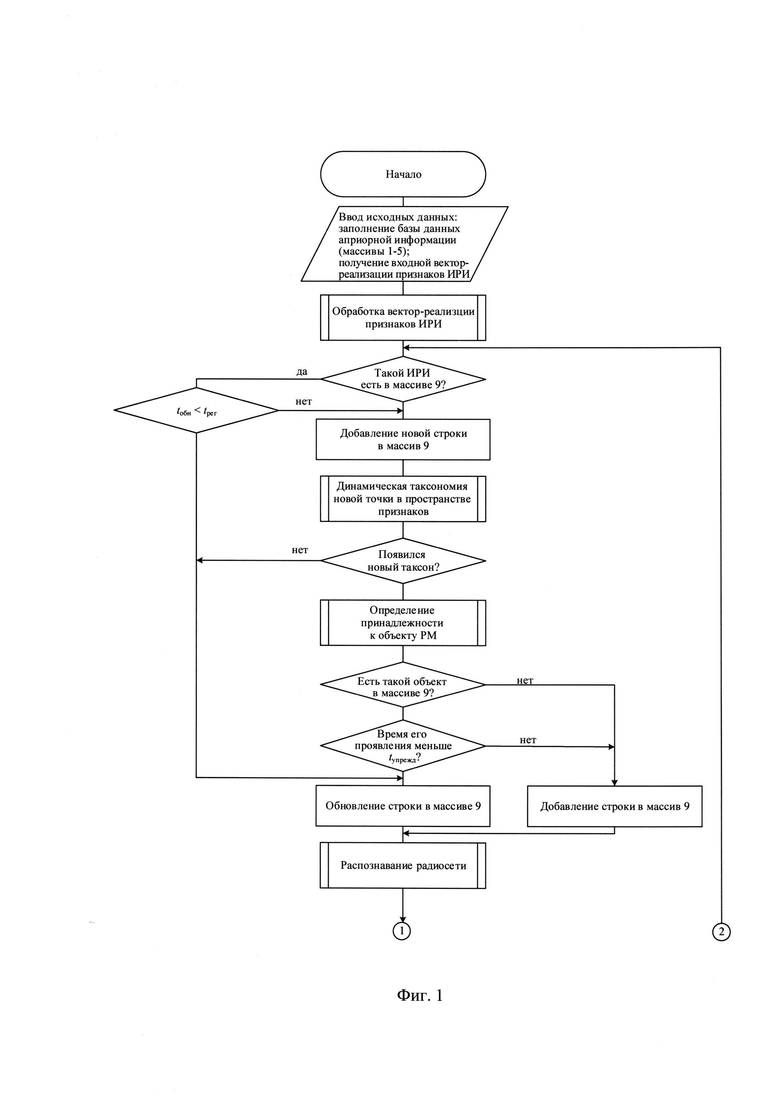
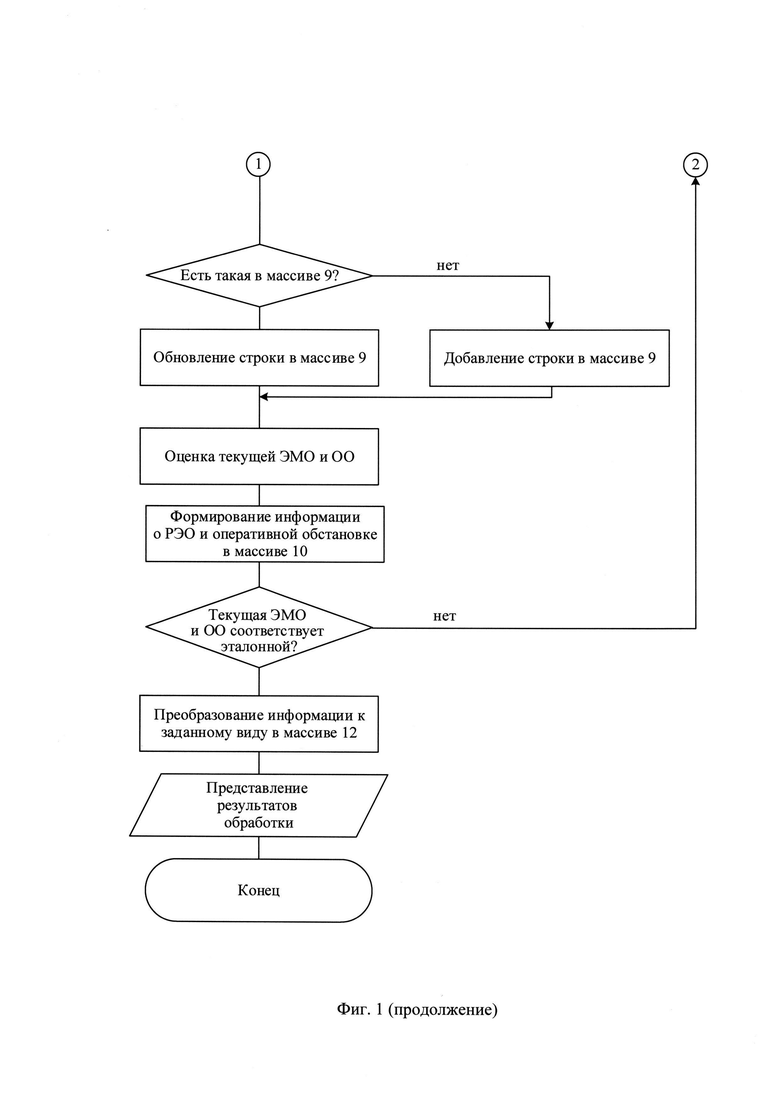
на фиг. 1 - обобщенный алгоритм обработки результатов радиомониторинга;
на фиг.2 - трехмерная матричная геопространственная модель заданного района;
на фиг. 3 - алгоритм формирования трехмерной матричной геопространственной модели;
на фиг. 4 - обобщенная схема алгоритма «трассовой» обработки информации;
на фиг. 5 - появление нового таксона как признак существенности события;
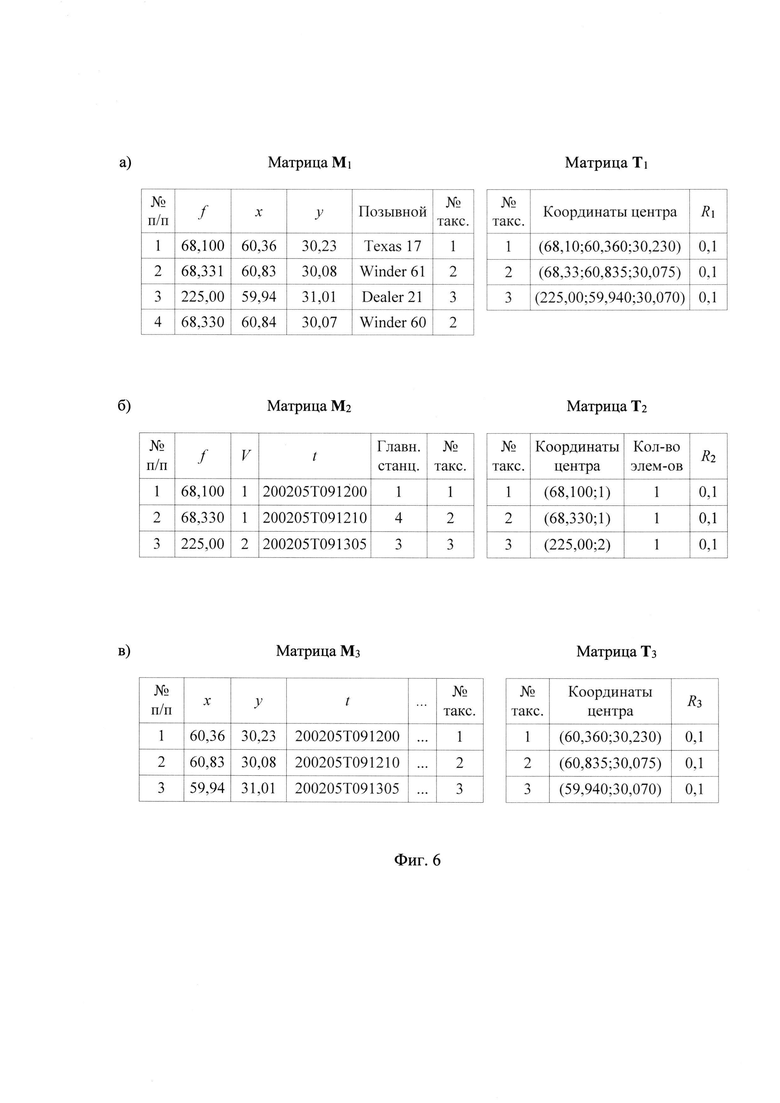
на фиг. 6 - пример заполнения:
а) матрицы источников радиоизлучения M1;
б) матрицы источников РМ М2;
в) матрицы объектов РМ М3;
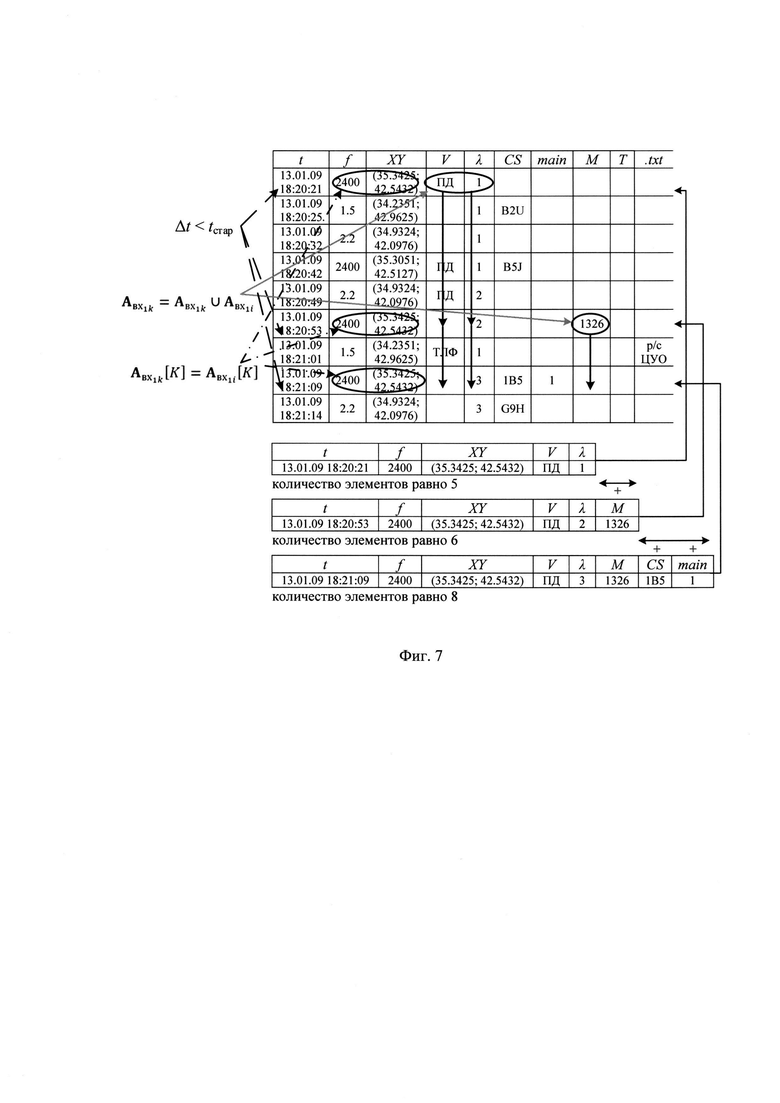
на фиг. 7 - «мозаичная» схема накопления данных радиомониторинга;
на фиг. 8 - результаты оценки эффективности предлагаемого способа;
на фиг. 9 - обобщенная структурная схема устройства обработки результатов радиомониторинга.
Анализ тенденций использования средств электросвязи в мире свидетельствует о экспоненциальном росте их числа во всех областях деятельности человека. В результате современные условия ведения РМ характеризуются перегруженностью частотного диапазона, снижением семантической доступности к излучениям контролируемых РЭС. Наиболее информативными на этом фоне становятся структурно-статистические признаки, а их обработка предполагает максимальное использование средств автоматизации.
Оперативная (текущая) обработка информации РМ, подразумевающая решение в реальном времени задач вскрытия объектов радиомониторинга по-прежнему опирается на интеллектуальную деятельность должностных лиц информативно-аналитических органов. Существуют жесткие ограничения на время представлений данных, вызванные в первую очередь быстрым старением информации о местоположении объектов, а результативность РМ определяют количеством вскрытых в ходе обработки объектов в единицу времени. В настоящее время существует несколько подходов к решению рассмотренной проблемы. Однако в них недостаточно проработаны вопросы формирования и использования средств информационно-справочной поддержки решения задач обработки, выстраивания последовательности процедур обработки поступающей информации, требуют доработки вопросы вскрытия ОО по структурно-статистическим признакам и др. Авторами предлагается модифицированный способ «трассовой» обработки результатов РМ, который предполагает объединение и автоматическое определение последовательности процедур обработки непосредственно по мере прохождения этапов обработки (см. фиг. 4). Основное преимущество данного подхода состоит в существенном сокращении длины цепочки процедур обработки входных реализаций за счет исключения из нее процедур, выполнение которых для текущей вектор-реализации признаков не требуется, что обеспечивает сокращение временных затрат на обработку информации. Такой результат достигают внедрением в конце каждого этапа обработки блока принятия решения о необходимости перехода к следующему этапу (блок 4, фиг. 4).
В предлагаемом способе для решения поставленной задачи на подготовительном этапе выполняют следующие операции (см. фиг. 1). Формируют первый массив базы данных о физико-географических условиях заданного района, оказывающих влияние на тактические свойства местности (см. Военная топография/ А.А. Псарев, А.Н. Коваленко, A.M. Куприн. - М.: Воениздат, 1986. - 386 с.). В прототипе предлагается оцениваемый район разбивать на элементарные участки, для каждого их которых выполняют вычисление значений его свойств относительно рассматриваемого субъекта - транспортного средства (при оценке проходимости), конкретного пункта управления с его площадными, структурными характеристиками (при оценке защитных свойств), конкретной радиостанции и антенно-фидерной системы (при оценке возможности установления радиосвязи) и т.д. Такой подход подразумевает оценку тактических свойств местности только применительно к рассматриваемому объекту. Однако для случая большого количества разнотипных объектов РМ предполагается многократное вычисление характеристик и свойств одних и тех же элементарных участков местности. Поэтому для оценки тактических свойств местности предлагается использовать трехмерную матрицу геопространственной модели местности (см. фиг. 2). Матрица Cijk представляет собой математическую конструкцию для размещения результатов вычисления характеристик элементарных участков местности, используемых в дальнейшем при оценке тактических свойств. Индексы (i, j) определяют место элементарного участка в оцениваемом районе, а индекс k соответствует слоям матрицы, в которых размещаются значения конкретных характеристик элементарного участка. Порядок расчета характеристик элементарных участков приведен в Приложении 1.
Порядок формирования матрицы Cijk представлен на фиг. 3. Он заключается в последовательном обходе элементарных участков заданного района местности, вычислении значений различных свойств этих участков и записи их в элементы соответствующих слоев матрицы Cijk.
Формируют компьютерные модели объектов военной техники и заносят информацию в виде второго массива данных. Последние содержат физические параметры объектов  i-го типа, i=1, 2, …, I, фото или радиолокационный снимок
i-го типа, i=1, 2, …, I, фото или радиолокационный снимок  (см. фиг. 2 описания прототипа).
(см. фиг. 2 описания прототипа).
Далее формируют третий массив данных с потенциальными данными пространственно-временных и количественных характеристик объектов военной техники. Кроме того, в третий массив данных заносят сведения об общей площади заданного района S, результаты предварительного анализа на пригодность совокупности элементарных участков с площадью Si для развертывания различных объектов или их элементов (на основе анализа данных первого массива), удаление каждого i-го объекта от барьерного рубежа Li для различных оперативных условий, взаимном удалении между i-м и j-м объектами dij и др. По выбору оператора необходимые данные об объектах отображают в виде табличного и/или графического представления.
Формируют четвертый массив данных с параметрами РЭС: диапазоном рабочих частот ΔF, видом передачи Vl, l=1, 2, …, L, типом РЭС Tu, u=1, 2, …, U, режимом функционирования РЭС modeλ, λ=1, 2, …, Λ, среднем времени работы РЭС при выходе в эфир τсп, интервалом времени пребывания n-го РЭС на одной позиции τти. При необходимости этот массив может быть расширен другими техническими и оперативными параметрами РЭС.
После этого приступают к формированию пятого массива данных с параметрами узлов связи пунктов управления различного уровня. В их число входят количество n РЭС различных типов Тип, n=1, 2, …, N, размеры необходимой площадки для их развертывания Sr.
Шестой массив базы данных предназначен для хранения информации об оперативно-тактических нормативах и пространственно- временных характеристиках по размещению УС ПУ на местности: удалении УС от соответствующих ПУ dn и барьерного рубежа Ln, взаимным удалением УС ПУ одного  и различных
и различных  уровней управления, времени пребывания УС на одной позиции Тти.
уровней управления, времени пребывания УС на одной позиции Тти.
Подготовительный этап завершается формированием массива данных с эталонными описаниями различных вариантов оперативной обстановки (наступление в центре или на одном из флангов заданного района, оборона и т.д.). При этом учитывают как стандартный набор сил и средств, так и присутствующий в заданном районе. Далее определяют соответствующий набор радиосредств для этой группировки объектов, порядок организации радиосвязи между ее элементами с учетом технических характеристик РЭС. В результате получают эталонные описания ЭМО для всех вариантов развития оперативной обстановки. От качества описания эталонных моделей оперативной и ЭМО в дальнейшем зависит и адекватность принимаемых решений.
На следующем этапе после задания по возможности всеобъемлющей априорной информации об объектах приступают к режиму анализа оперативной и ЭМО, осуществляют оценку ЭМД РЭС, находящихся в заданном районе. Последняя косвенно характеризует не только достижимое качество оценки ЭМО, но и оптимальность пространственного размещения измерителей. Поэтому на этом этапе возможна коррекция местоположения некоторых измерителей с целью улучшения ЭМД объектов РМ. Результаты оценки ЭМД записывают в восьмой массив данных и по требованию оператора представляют на экране монитора на фоне цифровой карты ГИС.
Предлагаемый способ обработки результатов РМ основан на применении алгоритма динамической таксономии DINA, суть которого заключается в следующем (см. Загоруйко Н.Г. Прикладные методы анализа данных и знаний. Новосибирск: Изд-во ИМ СО РАН, 1999. - С. 45-46). На начальном этапе множество точек в n-мерном пространстве, характеризующих поступившие вектор-реализации n анализируемых признаков, является пустым. Поэтому таксономия осуществляется на точках, возникающих по одной или небольшими группами. Задается радиус гиперсферы R и первая из появившихся точек объявляется центром первого таксона. При появлении каждой последующей точки осуществляется проверка, не попадает ли она в один из существующих таксонов путем сравнения расстояния от точки до центров таксонов. Если найдется такое расстояние меньшее R, то новая точка включается в состав соответствующего таксона, а его центр тяжести пересчитывается. В противном случае она объявляется центром нового таксона.
Данный подход для определения существенности изменений, вносимых в предметную область обрабатываемой реализацией признаков на примере двухмерного признакового пространства, n=2, показан на фиг. 5. Для каждого узла принятия решения Dj строится отдельная таксономия Tj со своими точками, соответствующими ключевым значениям строк матрицы Mj, своим радиусом Rj. Особенностью алгоритма динамической таксономии является то, что при добавлении новой точки переразбиения всего множества точек на таксоны не происходит, а задействуется либо таксон с ближайшим центром тяжести, либо новый таксон. Замечено, что основным существенным событием, требующим внесения изменения в матрицы более высокого уровня Mj+1, является появление нового источника радиоизлучения, радиосети, объекта РМ. Следовательно, в терминах предлагаемого способа таксономии существенности изменения описания предметной области на каждом этапе обработки соответствует ситуация появления нового таксона в таксономии Tj (точка A на фиг. 5, n=2).
В процессе работы для оценки текущей ЭМО (на основе алгоритма DINA) предлагается использовать «трассовую» обработку данных (см. фиг. 7). Последняя предполагает следующую «трассу» обработки: источник радиоизлучения - радиосеть - объект радиомониторинга - состояние и деятельность объекта РМ - оценка ЭМО - получение выводов по данным РМ.
Первый этап заключается в обработке входного информационного потока Iвх, который представляет собой набор параметров радиоизлучений от различных средств РМ. Формируют универсальный формализованный вектор параметров Iвх от m-го РЭС:

где ƒm - рабочая частота m-го РЭС, tm - время выхода m-го РЭС в эфир, (x,y)m - координаты m-го РЭС, Vm - вид передачи m-го РЭС, CSm - его позывной, Tm - тип РЭС, modem - режим функционирования m-го РЭС,  - время пребывания m-го РЭС на одной позиции,
- время пребывания m-го РЭС на одной позиции,  - среднее время работы m-го РЭС при выходе в эфир, dij - взаимное удаление i-го и j-го РЭС, функционирующих в одной радиосети. Последний может быть расширен в зависимости от сложившейся ЭМО и возможностей измерителей. В предлагаемом способе не рассматриваются объекты и их РЭС, находящиеся в воздухе. Так же исключены из рассмотрения параметры сигналов радиотехнических средств.
- среднее время работы m-го РЭС при выходе в эфир, dij - взаимное удаление i-го и j-го РЭС, функционирующих в одной радиосети. Последний может быть расширен в зависимости от сложившейся ЭМО и возможностей измерителей. В предлагаемом способе не рассматриваются объекты и их РЭС, находящиеся в воздухе. Так же исключены из рассмотрения параметры сигналов радиотехнических средств.
Вероятность одновременного заполнения всех элементов вектора параметров обнаруженного РЭС незначительна. Некоторые его элементы могут так и остаться нулевыми.
По окончании инициализации данных местоположения РЭС на фоне электронной карты ГИС и обработки параметров радиосигналов полученные результаты заносят в девятый массив базы данных и отображают на электронной карте ГИС. На основе полученных в массиве 9 данных о текущей ЭМО и априорных данных об объектах (массивы 2-7) ЭМД РЭС (массив 8) приступают к анализу оперативной обстановки в заданном районе. Для этого определяют взаимные удаления РЭС. Это целесообразно выполнить с использованием выражения для обобщенного евклидова расстояния.
Минимальным представлением вектор-реализации признаков (1) должна быть триада: время tm - рабочая частота ƒm - координаты РЭС (х,у)m. Они являются основными, без них обработка не осуществляется. Поступившие векторы параметров  образуют матрицу
образуют матрицу  (см. фиг. 6а).
(см. фиг. 6а).
На основе матрицы М1 строится таксономия Т1 для принятия решения о продолжении обработки. На фиг.6а приведен пример разбиения множества строк М1 на таксоны по параметрам (ƒ,x,y), обеспечивающим выявление факта появления нового источника радиоизлучения.
Результаты выполнения процедур распознавания оперативно-тактического назначения радиосетей и радионаправлений на втором этапе обработки формируют матрицу М2. Изменения, вносимые в содержание строк этой матрицы, так же имеют различную значимость. Поэтому для определения необходимости перехода к третьему этапу осуществляется динамическая таксономия источников РМ. В качестве существенных признаков в рассматриваемом на фиг. 6б примере выбраны значения рабочей частоты ƒ и вида передачи V.
Несмотря на то, что площадные характеристики объектов различного уровня иерархии управления существенно разнятся, для выявления событий, свидетельствующих об изменениях обстановки (появлении новых объектов, перемещении объектов), при построении динамической таксономии третьего этапа необходимо использовать минимальный радиус гиперсферы (см. фиг. 6в).
Таким образом, представленные материалы и рассмотренные примеры свидетельствуют о рациональности применения метода динамической таксономии в качестве основы построения решающих функций при формировании «трассы» текущей обработки результатов радиомониторинга. Выполненные исследования показывают, что чувствительность предложенного способа напрямую зависит от информативности выбранных ключевых признаков, измерений, в которых строится таксономия, а также радиуса R гиперсферы.
Далее определяют число таксонов РЭС в заданном районе Uk, их взаимные удаления, что позволяет формировать предварительные выводы об оперативной обстановке. В рамках каждого таксона определяют среднее значение дистанции связи в соответствии с выражениями:


где n - количество РЭС в радиосети, dcв - дистанция связи между одним из корреспондентов сети с координатами (хрс, yрс) и главной РЭС с координатами (xгл, yгл).
Кроме того, представляет интерес удаление каждого таксона РЭС от барьерного рубежа  Для этого находят минимальное удаление объектов (РЭС) от прямых отрезков ломаной линии, которыми интерпретируется барьерный рубеж. Полученные результаты используют для формирования десятого массива базы данных. Дополнительно в этот массив поступают сведения о ЭМО из девятого массива и проанализированные характеристики рельефа местности заданного района из первого массива данных. Для последующей обработки используют параметры барьерного рубежа, сведения о местоположении РЭС и объектов, пространственные характеристики (удаление РЭС и объектов от барьерного рубежа, взаимное удаление РЭС и объектов, и т.д.)
Для этого находят минимальное удаление объектов (РЭС) от прямых отрезков ломаной линии, которыми интерпретируется барьерный рубеж. Полученные результаты используют для формирования десятого массива базы данных. Дополнительно в этот массив поступают сведения о ЭМО из девятого массива и проанализированные характеристики рельефа местности заданного района из первого массива данных. Для последующей обработки используют параметры барьерного рубежа, сведения о местоположении РЭС и объектов, пространственные характеристики (удаление РЭС и объектов от барьерного рубежа, взаимное удаление РЭС и объектов, и т.д.)
Совокупность полученных сведений об оперативной и ЭМО сравнивают с их эталонными описаниями, хранящимися в седьмом массиве данных. При достаточной степени совпадений полученных результатов с одним из эталонных описаний принимают решение в его пользу, которое записывают в одиннадцатый массив базы данных вместе с полученными результатами анализа.
На основе содержимого одиннадцатого массива формируют двенадцатый массив данных с формализованными данными об оперативной и электромагнитной обстановке в заданном районе для потребителей информации, которую представляют на электронной карте ГИС. Форму представления результатов анализа, как правило, определяет заказчик информации. Последние содержат сведения об ЭМО, составе, состоянии и деятельности объектов РМ, оперативной обстановке в заданном районе.
В противном случае при невыполнении пороговых условий по идентичности полученных оценок с одной из эталонных моделей массива 7 продолжают выполнять анализ текущей ЭМО, а на ее основе оперативной обстановки.
Для оценки эффективности предложенного способа (см. Приложение 2) был проведен эксперимент, в ходе которого было определено сокращение временных затрат на обработку входных вектор-реализаций по сравнению со способом-прототипом (см. фиг. 8). Здесь временные затраты на обработку вектор-реализаций входного потока выражены в количестве процедур по их обработке. Из рассмотрения фиг. 8 следует, что использование заявляемого способа позволяет сократить временные затраты на 32%.
Предлагаемый способ обработки результатов радиомониторинга может быть реализован с помощью устройства, приведенного на фиг. 9. Устройство содержит блок ввода информации 1, блок индикации 2, первую входную шину устройства 3, модуль хранения статической информации 4 в составе восьми блоков памяти 4.1-4.8, блок расчета электромагнитной доступности 5, блок хранения динамической информации 6, блок оценки текущей электромагнитной обстановки 7, блок локализации радиоэлектронных средств 8, блок оценки оперативной обстановки 9, блок принятия решения 10, блок преобразования информации 11, вторую входную шину устройства 12 и выходную шину 13.
На подготовительном этапе с помощью блока ввода информации 1 вводится вся априорная информация в модуль хранения статической информации 4. Последняя размещается по соответствующим блокам памяти 4.1 -4.7 (массивы 1-7 соответственно).
Все вводимые данные при необходимости по команде блока 1 отражают на экране блока индикации 2.
На начальном этапе работы с помощью блока расчета ЭМД 5 определяют границы доступности излучений РЭС различных диапазонов частот до всех измерителей. Данные о последних (координаты местоположения, особенности их географического расположения, рабочий диапазон частот и др.) поступают на группу информационных входов блока 5 с группы информационных выходов блока 1.
На данном этапе имеется возможность оптимизировать (уточнить) местоположение измерителей относительно заданного района РМ. Результаты оценки ЭМД записывают в блок памяти 4.8 модуля хранения статической информации 4.
В процессе работы входной информационный поток  об ЭМО по входной шине 3 поступает на группу информационных входов блока хранения динамической информации 6. Блок 6 представляет собой буферное запоминающее устройство. Информация об очередном m-м излучении в виде вектора параметров (ƒm, tm, (х,у)m, Vm, CSm, Tm, modem,
об ЭМО по входной шине 3 поступает на группу информационных входов блока хранения динамической информации 6. Блок 6 представляет собой буферное запоминающее устройство. Информация об очередном m-м излучении в виде вектора параметров (ƒm, tm, (х,у)m, Vm, CSm, Tm, modem,  ,
,  , dij) с группы информационных выходов блока 6 поступает на первую группу информационных входов блока оценки текущей ЭМО 7. На вторую группу его информационных входов поступают сведения о параметрах РЭС с группы информационных выходов блока памяти 4.4. На третью группу информационных входов поступают цифровые модели местности с группы информационных выходов блока 4.1.
, dij) с группы информационных выходов блока 6 поступает на первую группу информационных входов блока оценки текущей ЭМО 7. На вторую группу его информационных входов поступают сведения о параметрах РЭС с группы информационных выходов блока памяти 4.4. На третью группу информационных входов поступают цифровые модели местности с группы информационных выходов блока 4.1.
В блоке 7 осуществляют анализ поступивших данных: определение типа m-го РЭС, уточнение его местоположения на местности, расчет дистанции связи dij РЭС, работающих в одной радиосети, формирование предварительных выводов о принадлежности РЭС к УС ПУ. По команде блока 1 результаты анализа блока 7 высвечиваются на экране блока 2 на фоне цифровой карты ГИС.
Полученная в блоке 7 информация с группы информационных выходов поступает на первую группу информационных входов блока локализации РЭС 8. На вторую группу его информационных входов поступает априорная информация о характеристиках объектов РМ (УС ПУ) с группы информационных выходов блока памяти 4.5. На третью группу информационных входов блока 8 поступают оперативно-тактические нормативы по размещению объектов РМ на местности с группы информационных выходов блока 4.6. На четвертую группу входов блока 8 поступает значение радиуса гиперсферы R. В функции блока 8 входит локализация (объединение) РЭС в группы (таксоны).
Результаты анализа (сформированные таксоны РЭС) совместно с цифровой картой ГИС с группы информационных выходов блока 8 поступают на первую группу информационных входов блока оценки оперативной обстановки 9. На вторую группу его информационных входов поступают значения эталонных описаний оперативной и электромагнитной обстановки для типовых оперативных ситуаций с группы информационных выходов блока 4.7. На третью группу информационных входов поступает информация об ЭМД РЭС с группы информационных выходов блока 4.8. На четвертую группу информационных входов блока 9 поступают модели объектов с группы информационных выходов блока 4.2. На пятую группу информационных входов подают пространственно-временные характеристики объектов с группы информационных выходов блока 4.3.
В функции блока 9 входит «трассовая» обработка полученных в блоке 8 данных, сравнительный анализ эталонных описаний оперативной и ЭМО с реальной динамично изменяющейся оперативной и РЭО с учетом ЭМД излучений РЭС и выбор наиболее близкого эталонного описания.
Выбранное наиболее близкое эталонное описание оперативной и ЭМО совместно с их текущим значением с группы информационных выходов блока 9 поступают на группу информационных входов блока принятия решения 10. Здесь оценивают степень отличия эталонного описания OO и ЭМО от их текущих значений. В случае минимальных отличий, не превышающих заданный порог, блок 10 принимает решение в пользу выбранного эталонного описания OO и ЭМО. В свою очередь это эталонное описание характеризует состав, состояние и деятельность группы объектов в заданном районе.
С первой группы информационных выходов блока 10 полученная информация поступает на группу информационных входов блока преобразования информации 11. Последний предназначен для преобразования полученной информации к виду, заданному потребителем информации. К заказчику она поступает по выходной шине 12. В противном случае, когда не выполняются пороговые условия в блоке 10, информация на его выходе отсутствует, а устройство продолжает выполнять анализ электромагнитной и оперативной обстановки.
Таким образом, приведенное устройство позволяет без существенных технических проблем реализовать заявляемый способ.
Приложение 1
Порядок расчета характеристик элементарных участков
Для k=1:
1. Вычисление координат угловых точек элементарного участка (i, j) по формулам:
(x1, у1)=(x0+(i-1)⋅L, у0 - (j-1)⋅L);
(x2, у2)=(x0+i⋅L, у0 - (j-1)⋅L);
(x3, у3)=(x0+i⋅L, у0 - j⋅L);
(x4, у4)=(x0+(i-1)⋅L, у0 - j⋅L);
где (x0, у0) - координаты северо-западного угла выбранного района карты местности, L - длина стороны элементарного участка (м);
2. Измерение абсолютных высот угловых точек h1, h2, h3, h4;
3. Вычисление углов наклона скатов между угловыми точками элементарного участка (i, j) по формулам:
α1=|arctg((h1 - h2)/L)⋅180/π|;
α2=|arctg((h2 - h3)/L)⋅180/π|;
α3=|arctg((h3 - h4)/L)⋅180/π|;
α4=|arctg((h4 - h1)/L)⋅180/π|;
α5=|arctg((h1 - h3)/L⋅20,5)⋅180/π|;
α6=|arctg((h2 - h4)/L⋅20,5)⋅180/π|;
4. В ячейку (i, j) матрицы Cijk записать максимальное значение угла наклона ската из вычисленных на этапе 3.
Приложение 2
Оценка эффективности заявляемого способа
Для проверки достигаемого положительного эффекта от применения заявляемого способа обработки результатов радиомониторинга был проведен эксперимент с помощью имитационной модели, разработанной в среде AnyLogic на основе агентного подхода. Модель содержала агентов двух классов: «Объект радиомониторинга» и «РЭС».
Моделировалось функционирование 142 объектов радиомониторинга, на узлах связи которых суммарно использовалось 221 радиоэлектронное средство. В течение суток на обработку поступило 60986 вектор-реализаций. В соответствии с оперативно-тактическими нормативами по периодичности перемещений объектов радиомониторинга (см. Пат. РФ 2659486, фиг. 5) объектами РМ было осуществлено 668 смен местоположения. В соответствии с логикой работы алгоритма в заявляемом способе к существенным изменениям обстановки относятся события первого обнаружения объекта, а также установления факта смены им местоположения, приводящие к появлению новых таксонов в динамической таксономии (см. Таблицы №1 и №2). Поэтому, в течение суток полный цикл обработки в среднем требовался только для одной из 68 вектор-реализаций входного потока. Это позволило повысить скорость обработки входного потока на 32% (см. фиг. 8) и обеспечить достаточную полноту его обработки.


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обработки результатов радиомониторинга | 2019 |
|
RU2736329C1 |
| Способ обработки результатов радиомониторинга | 2017 |
|
RU2659486C1 |
| Способ обработки результатов радиомониторинга | 2021 |
|
RU2781947C1 |
| Способ профессиональной подготовки должностных лиц органов управления радиомониторингом | 2021 |
|
RU2776323C1 |
| Способ профессиональной подготовки должностных лиц органов управления радиоэлектронной борьбы | 2022 |
|
RU2794470C1 |
| Способ определения координат объектов и их распознавания | 2022 |
|
RU2787946C1 |
| Способ прокладывания маршрута движения подвижных объектов по пересеченной местности | 2018 |
|
RU2681667C1 |
| Способ системно-динамического представления радиоэлектронной обстановки для профессиональной подготовки специалистов радиомониторинга | 2016 |
|
RU2627255C1 |
| Контрольно-измерительная система радиомониторинга | 2022 |
|
RU2790349C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2837386C1 |






Изобретение относится к области автоматизации информационно-управляющих систем. Технический результат - повышение скорости обработки входного потока данных за счет выстраивания последовательности этапов обработки на основе определения изменений, вносимых входным потоком данных, своевременной коррекции информации с учетом времени ее старения. Для этого предложен способ обработки результатов РМ, который заключается в том, что формируют базу данных с данными о физико-географических условиях заданного района, формируют компьютерные модели объектов и заносят в базу данных. Формируют массив данных с параметрами радиоэлектронных средств, массив данных с параметрами узлов связи пунктов управления, массив данных с эталонными нормативами по размещению УС на местности, массив данных с эталонными описаниями различных вариантов оперативной и соответствующих им электромагнитной обстановки (ЭМО), а в процессе работы оценивают ЭМО. По ее результатам определяют локальности РЭС, сравнивают полученные результаты текущей ЭМО с ее эталонными моделями. При их совпадении принимают решение о сложившейся оперативной обстановке и вероятном местоположении оцениваемых объектов и их состоянии. 1 з.п. ф-лы, 2 табл., 2 пр., 9 ил.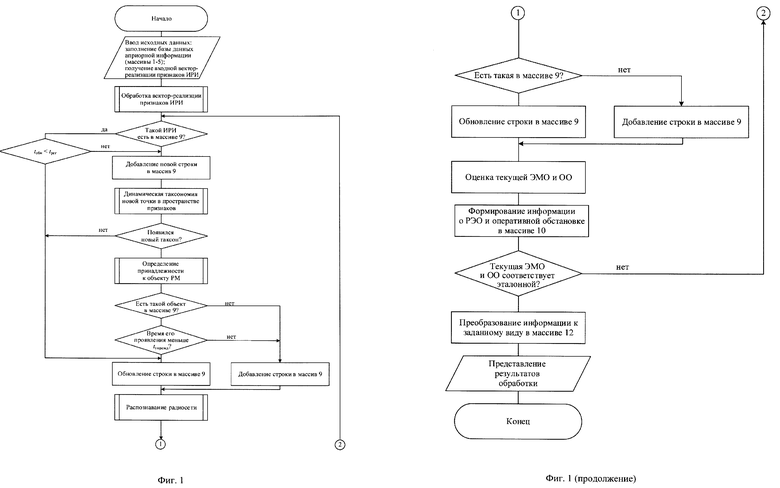
1. Способ обработки результатов радиомониторинга (РМ), заключающийся в том, что на подготовительном этапе формируют базу данных в составе первого массива с данными о физико-географических условиях заданного района, формируют компьютерные модели объектов и заносят их в базу данных в виде второго массива данных, содержащего физические параметры объекта  i-го типа, i=1, 2, …, I, фото или радиолокационный снимок Phi, формируют третий массив данных с потенциальными сведениями об их пространственно-временных и количественных характеристиках, общей площади заданного района S, площади элементарного участка Si, удовлетворяющего требованиям по размещению i-го объекта или его элемента, удалению каждого i-го объекта от барьерного рубежа Li для различных оперативных условий, взаимном расстоянии между i-м и j-м объектами dij, формируют четвертый массив данных с параметрами радиоэлектронных средств (РЭС): Δƒ, V, Tu, modeλ, τсп, τти, где Δƒ - диапазон рабочих частот, V - вид передачи, Tu - тип радио или радиотехнического средства, u=1, 2, … U, modeλ - режим функционирования РЭС, λ=1, 2, …, Λ; τсп - среднее время работы РЭС при выходе в эфир, τти - интервал времени пребывания u-го РЭС на одной позиции, пятый массив данных с параметрами узлов связи (УС) пунктов управления (ПУ): количеством n РЭС различных типов Tип, n=1, 2, …, N, размерами необходимой площади для их развертывания Sr, Sr=n⋅Si, шестой массив данных с оперативно-тактическими нормативами по размещению УС на местности: удалением УС от соответствующих ПУ dn и барьерного рубежа Ln, взаимным удалением УС ПУ одного
i-го типа, i=1, 2, …, I, фото или радиолокационный снимок Phi, формируют третий массив данных с потенциальными сведениями об их пространственно-временных и количественных характеристиках, общей площади заданного района S, площади элементарного участка Si, удовлетворяющего требованиям по размещению i-го объекта или его элемента, удалению каждого i-го объекта от барьерного рубежа Li для различных оперативных условий, взаимном расстоянии между i-м и j-м объектами dij, формируют четвертый массив данных с параметрами радиоэлектронных средств (РЭС): Δƒ, V, Tu, modeλ, τсп, τти, где Δƒ - диапазон рабочих частот, V - вид передачи, Tu - тип радио или радиотехнического средства, u=1, 2, … U, modeλ - режим функционирования РЭС, λ=1, 2, …, Λ; τсп - среднее время работы РЭС при выходе в эфир, τти - интервал времени пребывания u-го РЭС на одной позиции, пятый массив данных с параметрами узлов связи (УС) пунктов управления (ПУ): количеством n РЭС различных типов Tип, n=1, 2, …, N, размерами необходимой площади для их развертывания Sr, Sr=n⋅Si, шестой массив данных с оперативно-тактическими нормативами по размещению УС на местности: удалением УС от соответствующих ПУ dn и барьерного рубежа Ln, взаимным удалением УС ПУ одного  и различных
и различных  уровней управления, временем пребывания УС на одной позиции Tти, и седьмой массив данных с Н эталонными описаниями различных вариантов оперативной и соответствующих им вариантов электромагнитной обстановки (ЭМО), а в процессе работы оценивают электромагнитную доступность (ЭМД) РЭС объектов РМ, сведения о которой записывают в восьмой массив данных, а с учетом всех восьми массивов базы данных оценивают текущую ЭМО, формируют девятый массив данных с результатами оценки ЭМО в заданном районе с учетом ЭМД РЭС узлов связи ПУ: ƒm, tm, (х,у)m, Vm, CSm, Тm, modem,
уровней управления, временем пребывания УС на одной позиции Tти, и седьмой массив данных с Н эталонными описаниями различных вариантов оперативной и соответствующих им вариантов электромагнитной обстановки (ЭМО), а в процессе работы оценивают электромагнитную доступность (ЭМД) РЭС объектов РМ, сведения о которой записывают в восьмой массив данных, а с учетом всех восьми массивов базы данных оценивают текущую ЭМО, формируют девятый массив данных с результатами оценки ЭМО в заданном районе с учетом ЭМД РЭС узлов связи ПУ: ƒm, tm, (х,у)m, Vm, CSm, Тm, modem,  ,
,  , dlj, где ƒm - рабочая частота обнаруженного излучения РЭС, tm - дата и время обнаружения m-го РЭС, (х,у)m - координаты РЭС, работающего на m-й частоте, Vm - вид принятого на ней сигнала, CSm - позывной работающего РЭС, Тm - идентификационный тип РЭС, modem - режим функционирования РЭС на m-й частоте,
, dlj, где ƒm - рабочая частота обнаруженного излучения РЭС, tm - дата и время обнаружения m-го РЭС, (х,у)m - координаты РЭС, работающего на m-й частоте, Vm - вид принятого на ней сигнала, CSm - позывной работающего РЭС, Тm - идентификационный тип РЭС, modem - режим функционирования РЭС на m-й частоте,  - время работы РЭС;
- время работы РЭС;  - время пребывания РЭС на одной позиции, dlj - взаимное удаление l-го и j-го РЭС, работающих в одной радиосети, уточняют местоположение обнаруженных РЭС с учетом пригодности элементарных участков Si к их развертыванию, отображают полученные результаты в геоинформационной системе (ГИС), по результатам оценки ЭМО определяют локальные объединения РЭС, образующие УС ПУ, уточняют их местоположение с учетом пригодности участков Sr к их развертыванию, и локальные объединения анализируемых объектов, образованные совокупностью УС ПУ отдельных частей, соединений и объединений, а результаты анализа ЭМО записывают в десятый массив данных, сравнивают полученные результаты текущей ЭМО с ее эталонными моделями, хранящимися в седьмом массиве данных, при совпадении с заданной точностью текущей оценки ЭМО с описанием одной из эталонных моделей ЭМО принимают решение о сложившейся оперативной обстановке (ОО) и вероятном местоположении оцениваемых объектов и их состоянии, а результаты оценки оперативной и электромагнитной обстановки записывают в одиннадцатый массив данных, на основе которых далее формируют двенадцатый массив данных с формализованными данными об оперативной и электромагнитной обстановке в заданном районе для потребителей информации, которую представляют на электронной карте ГИС, в противном случае при невыполнении пороговых условий продолжают оценку текущей электромагнитной обстановки, а информацию об объектах и их состоянии из десятого массива данных используют для формирования одиннадцатого массива данных, отличающийся тем, что анализ входного потока параметров радиоизлучений осуществляют на основе динамической таксономии путем проверки наличия в девятом массиве данных о предыдущих излучениях этого РЭС, полученных в результате завершенных циклов обработки, при наличии данных, зарегистрированных в пределах времени упреждения смены местоположения объекта РМ, на котором размещено РЭС, обновляют время его регистрации, а дальнейшую обработку полученных данных на основе формирования локальностей РЭС не проводят, сведения о параметрах и времени работы РЭС, подтверждающие факт функционирования объекта РМ, на котором оно размещается, используют для формирования выводов по оценке ЭМО и оперативной обстановки и записывают в одиннадцатый массив данных.
- время пребывания РЭС на одной позиции, dlj - взаимное удаление l-го и j-го РЭС, работающих в одной радиосети, уточняют местоположение обнаруженных РЭС с учетом пригодности элементарных участков Si к их развертыванию, отображают полученные результаты в геоинформационной системе (ГИС), по результатам оценки ЭМО определяют локальные объединения РЭС, образующие УС ПУ, уточняют их местоположение с учетом пригодности участков Sr к их развертыванию, и локальные объединения анализируемых объектов, образованные совокупностью УС ПУ отдельных частей, соединений и объединений, а результаты анализа ЭМО записывают в десятый массив данных, сравнивают полученные результаты текущей ЭМО с ее эталонными моделями, хранящимися в седьмом массиве данных, при совпадении с заданной точностью текущей оценки ЭМО с описанием одной из эталонных моделей ЭМО принимают решение о сложившейся оперативной обстановке (ОО) и вероятном местоположении оцениваемых объектов и их состоянии, а результаты оценки оперативной и электромагнитной обстановки записывают в одиннадцатый массив данных, на основе которых далее формируют двенадцатый массив данных с формализованными данными об оперативной и электромагнитной обстановке в заданном районе для потребителей информации, которую представляют на электронной карте ГИС, в противном случае при невыполнении пороговых условий продолжают оценку текущей электромагнитной обстановки, а информацию об объектах и их состоянии из десятого массива данных используют для формирования одиннадцатого массива данных, отличающийся тем, что анализ входного потока параметров радиоизлучений осуществляют на основе динамической таксономии путем проверки наличия в девятом массиве данных о предыдущих излучениях этого РЭС, полученных в результате завершенных циклов обработки, при наличии данных, зарегистрированных в пределах времени упреждения смены местоположения объекта РМ, на котором размещено РЭС, обновляют время его регистрации, а дальнейшую обработку полученных данных на основе формирования локальностей РЭС не проводят, сведения о параметрах и времени работы РЭС, подтверждающие факт функционирования объекта РМ, на котором оно размещается, используют для формирования выводов по оценке ЭМО и оперативной обстановки и записывают в одиннадцатый массив данных.
2. Способ по п. 1, отличающийся тем, что на подготовительном этапе для формирования первого массива данных строят геопространственную модель заданного района местности, учитывающую его тактические свойства, позволяющую определить пригодность элементарных участков района для объектов радиомониторинга с различными требованиями к размещению.
| Способ обработки результатов радиомониторинга | 2017 |
|
RU2659486C1 |
| КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА РАДИОМОНИТОРИНГА | 2011 |
|
RU2459218C1 |
| КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА РАДИОМОНИТОРИНГА ОВЧ И УВЧ ДИАПАЗОНОВ "КУНИЦА" | 2007 |
|
RU2340914C1 |
| US 8064387 B2, 22.11.2011. | |||

