ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[01] Настоящее раскрытие относится к узлу погружного насоса и способу эксплуатации узла погружного насоса.
УРОВЕНЬ ТЕХНИКИ
[02] В WO 2014/154500 А1 раскрыто устройство для определения давления в линии подачи текучей среды, содержащее корпусную часть, которая может быть подключена к линии подачи текучей среды и имеет измерительный канал, в который введен модуль датчика для измерения давления, который соединен с модулем передачи для беспроводной передачи данных измерения, обнаруженных модулем датчика, при этом устройство выполнено с возможностью внешнего беспроводного источника питания этого модуля датчика посредством считывающего устройства. Корпусная часть снабжена крышкой на своем конце напротив измерительного канала, причем крышка выполнена из пластика. Устройство считывания содержит антенну.
[03] Корпусная часть и модуль датчика выполнены с возможностью выдерживания давления, которое присутствует в линии подачи текучей среды, к которой должно быть подключено устройство для определения давления. Тем не менее, устройство для определения давления не имеет возможности выдерживания имеющегося давления, если устройство будет погружено в жидкость. В частности, крышка не имеет возможности выдерживания больших давлений, механического напряжения, например, из-за вибрации или нагрева. Устройство для определения давления не может быть удалено из линии подачи текучей среды, не прерывая линию подачи текучей среды для транспортировки текучей среды.
СУЩНОСТЬ ИЗОБРЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[04] В отличие от таких известных устройств для определения давления, согласно вариантам выполнения настоящего изобретения предложен узел погружного насоса, который полностью способен выдерживать большие давления текучей среды, в которую узел погружного насоса должен быть погружен, механические напряжения и/или нагрев, и который способен обеспечить улучшенную беспроводную связь между его компонентами во время работы узла погружного насоса. Согласно дополнительным вариантам выполнения настоящего раскрытия предложен способ эксплуатации такого узла погружного насоса.
[05] Основная идея, лежащая в основе настоящего раскрытия для достижения этой цели, заключается в создании узла погружного насоса, содержащего погружной насос и герметично уплотненную капсулу датчика, причем капсула датчика может быть установлена таким образом, чтобы первичная катушка погружного насоса и вторичная катушка капсулы датчика могли эффективно и без проводов передавать данные и/или мощность между погружным насосом и капсулой датчика.
[06] В соответствии с первым аспектом настоящего раскрытия изобретения представлен узел погружного насоса, причем узел погружного насоса содержит
- погружной насос с корпусом, и
- капсулу датчика с герметично уплотненным кожухом, в котором капсула датчика установлена с возможностью отсоединения в положении датчика, расположенном на внешней поверхности корпуса погружного насоса,
- причем погружной насос содержит первичную катушку внутри корпуса, а капсула датчика содержит вторичную катушку внутри кожуха,
- при этом первичная катушка и вторичная катушка выполнены с возможностью индуктивной связи друг с другом для беспроводной передачи данных и/или мощности через корпус и кожух, когда капсула датчика установлена в положении датчика.
[07] Такой узел погружного насоса содержит погружные компоненты, которые выполнены с возможностью выдерживания давления в жидкости, в которую узел погружного насоса должен быть погружен. Герметично уплотненная капсула датчика может быть установлена в положении датчика для связи первичной катушки и вторичной катушки для передачи мощности и/или данных. Индуктивная связь между катушками позволяет герметично уплотнять капсулу датчика, то есть предотвращать попадание жидкости, даже под давлением окружающей жидкости, в капсулу датчика и избегать любых проблем, связанных с влажностью внутри капсулы датчика. Благодаря индуктивной связи между погружным насосом и капсулой датчика можно обойтись без каких-либо кабелей или проводов для передачи данных и/или мощности в и/или из капсулы датчика.
[08] Первичная катушка расположена в корпусе насоса, а вторичная катушка находится в кожухе датчика. При установке капсулы датчика в положении датчика первичная катушка и вторичная катушка могут быть связаны для индуктивной передачи мощности и/или данных. Передача данных и/или мощности осуществляется через конструкцию «от катушки к катушке», причем одна катушка является вторичной катушкой в капсуле датчика, а другая катушка является первичной катушкой в корпусе погружного насоса, который служит в качестве главного устройства. Использование катушек улучшает передачу мощности и/или данных, в частности, через корпус и кожух, которые расположены между катушками. Передача мощности и/или данных от и/или к капсуле датчика может быть достигнута без каких-либо физических разъемов, кабелей, батарей и/или открытия капсулы датчика или разборки узла погружного насоса.
[09] Съемная установка капсулы датчика в положении датчика позволяет эффективно обслуживать узел насоса. В частности, капсула датчика может быть заменена без разборки погружного насоса.
[10] Опционально, внутренняя поверхность корпуса может содержать углубление в корпусе, причем первичная катушка расположена в углублении в корпусе. Такое углубление в корпусе позволяет эффективно ориентировать первичную катушку с помощью углубления в корпусе в направлении положения датчика. Таким образом, первичная катушка предпочтительно расположена так, чтобы быть связанной с вторичной катушкой, когда капсула датчика установлена в положении датчика.
[11] Опционально, внутренняя поверхность кожуха может содержать углубление в кожухе, причем вторичная катушка расположена в углублении в кожухе. Такое углубление в кожухе позволяет эффективно позиционировать вторичную катушку, так что вторичная катушка расположена предпочтительным образом для связи с первичной катушкой, когда капсула датчика установлена в положении датчика. Предпочтительно, кожух содержит углубление в кожухе и корпус содержит углубление в корпусе, чтобы обеспечить эффективное выравнивание катушек.
[12] Опционально, расстояние между первичной катушкой и вторичной катушкой может составлять менее 5 мм, предпочтительно менее 3 мм, когда капсула датчика установлена в положении датчика. Такое расстояние между первичной катушкой и вторичной катушкой обеспечивает надежную установку и в то же время достаточное индуктивное соединение между первичной катушкой и вторичной катушкой. Корпус и кожух расположены между первичной катушкой и вторичной катушкой, и минимальное расстояние 2 мм, предпочтительно 1 мм и даже более предпочтительно 0,5 мм, является преимуществом для получения прочной герметично уплотненной капсулы датчика, способной выдерживать большие давление и механическое напряжение. Расстояние между первичной катушкой и вторичной катушкой предпочтительно совпадает с расстоянием между основаниями по существу цилиндрических углублений в корпусе и кожухе, в которых устанавливаются катушки.
[13] Опционально, первичная катушка может иметь первичную магнитную ось, а вторичная катушка может иметь вторичную магнитную ось, причем вторичная магнитная ось соосно и/или параллельно выровнена с первичной магнитной осью, когда капсула датчика установлена в положении датчика. Это обеспечивает эффективное магнитное соединение между первичной катушкой и вторичной катушкой с оптимизированной степенью передачи мощности и/или данных. Преимущественно выравнивание магнитных осей может быть эффективно достигнуто путем обеспечения по существу цилиндрических углублений в кожухе и корпусе.
[14] Возможно, узел погружного насоса может дополнительно содержать фиксирующий элемент, охватывающий капсулу датчика. Предпочтительно фиксирующий элемент может способствовать установке и/или выравниванию капсулы датчика в положении датчика. Фиксирующий элемент может быть установлен на внешней поверхности корпуса и содержать охватывающую секцию, такую как канал или углубление, для охвата капсулы датчика, в частности, в положении датчика. Фиксирующий элемент защищает капсулу датчика от ударов во время работы узла насоса, например, в скважине.
[15] Возможно, капсула датчика может образовывать продольную ось, проходящую от первого участка капсулы датчика, устанавливаемого с возможностью отсоединения в положении датчика, до второго участка капсулы датчика, причем капсула датчика охвачена по ее периметру фиксирующим элементом, и при этом фиксирующий элемент определяет канал для сообщения по текучей среде между вторым участком капсулы датчика и окружающей текучей средой, в которую погружной насос выполнен с возможностью погружения. Это определяет предпочтительную геометрию капсулы датчика и фиксирующего элемента. Фиксирующий элемент содержит канал, через который капсулу датчика можно направлять предпочтительно параллельно продольной оси, так что капсула датчика может быть установлена так, чтобы ее первый участок капсулы датчика находился в положении датчика. Сообщение по текучей среде через канал может быть использовано для улучшения чувствительности капсулы датчика.
[16] Возможно, фиксирующий элемент может содержать фильтр, демпфирующий элемент и/или препятствие, расположенное в канале для сообщения по текучей среде между второй капсулой датчика и окружающей текучей средой, в которую погружной насос выполнен с возможностью погружения. Текучая среда, в частности, может быть жидкостью. Такие фильтр, демпфирующий элемент и/или препятствие могут использоваться для улучшения способности капсулы датчика выполнять надежные измерения и/или защищать капсулу датчика от условий окружающей среды. Демпфирующий элемент и/или препятствие могут избегать гидравлического удара и/или кавитации вблизи капсулы датчика. Фильтр, демпфирующий элемент и/или препятствие могут быть выполнены заодно целое с фиксирующим элементом или отдельной частью, которая может быть удалена с фиксирующего элемента, например, для очистки. Фильтр, демпфирующий элемент и/или препятствие защищают капсулу датчика от ударов во время работы узла насоса в скважине, от частиц, которые взвешены в жидкости, в которую погружается узел насоса, и обеспечивает эффективное измерение температуры жидкости путем минимизации потенциального влияния температуры от погружного насоса.
[17] Возможно, фиксирующий элемент может быть изготовлен из пластика или композитного материала для обеспечения экономически выгодного варианта выполнения фиксирующего элемента, который может быть рентабельно изготовлен и установлен. Фиксирующий элемент может содержать секции, которые выполнены из материала, отличного от пластика или композитного материала, например металла, в частности стали.
[18] Возможно, корпус и/или кожух могут содержать секцию передачи в положении датчика, при этом секция передачи содержит нержавеющую сталь, стекло и/или металл с электропроводностью менее 107 A/(Вм), предпочтительно менее 8×106 A/(Вм), более предпочтительно, менее 2×106 A/(Вм). Такая секция передачи полезна с точки зрения герметичного уплотнения капсулы датчика, с одной стороны, и достаточно прозрачна для электромагнитного соединения, с другой стороны.
[19] Возможно, корпус и/или кожух могут содержать секцию передачи в положении датчика, при этом секция передачи содержит нержавеющую сталь, стекло и/или металл с относительной магнитной проницаемостью ниже 5, предпочтительно ниже 2. Опять же, такая секция передачи полезна с точки зрения герметичного уплотнения капсулы датчика, с одной стороны, и достаточно прозрачна для электромагнитного соединения, с другой стороны.
[20] Возможно, узел погружного насоса может дополнительно содержать электронный блок управления, выполненный с возможностью сканирования частот работы первичной катушки для работы первичной катушки на частоте, удовлетворяющей первому условию, согласно которому эффективность передачи мощности выше минимальной эффективности передачи мощности, и удовлетворяющей второму условию, согласно которому отношение сигнал/шум выше минимального отношения сигнал/шум. Это повышает эффективность передачи, которая может зависеть от точного положения капсулы датчика при установке в положении датчика. Примечательно, что резонансная частота первичной катушки и/или вторичной катушки обеспечивает оптимальную эффективность передачи, но, тем не менее, не обеспечивает лучший выбор для передачи мощности и/или данных, поскольку отношение сигнал/шум на этой частоте часто слишком мало, в частности, при передаче данных из капсулы датчика в погружной насос. Лучшая частота как компромисс между достаточной эффективностью передачи и достаточным отношением сигнал/шум может быть найдена путем сканирования частоты работы первичной катушки. пПодробно, в частности, когда погружной насос и/или любой из его компонентов включен, сканирование может быть выполнено с помощью относительно грубой и широкой развертки частоты, которая находит точку максимальной мощности (mpp), то есть частоту, для которой передача мощности является наиболее эффективной, и выполняется первое условие. За этим следует более узкий и более точный поиск рабочей частоты, которая удовлетворяет второму условию, близкому к точке максимальной мощности и обычно ниже нее. Предпочтительно, электронный блок управления может быть выполнен с возможностью повторения процедуры сканирования, когда передача мощности повторно оценивается и обнаруживается, что она не удовлетворяет первому и/или второму условию. Передача мощности может быть повторно оценена на постоянной, регулярной или событийной основе.
[21] Возможно, кожух капсулы датчика может иметь по существу цилиндрическую форму, определяющую продольную ось, при этом вторичная катушка определяет магнитную ось, параллельную продольной оси кожуха, для улучшения совмещения вторичной катушки с первичной катушкой и позиционирования и выравнивания капсулы датчика. Капсула датчика может быть установлена одним концом в углублении в наружном корпусе для достижения эффективного выравнивания продольной оси и/или второй магнитной оси.
[22] Возможно, капсула датчика может образовывать продольную ось, проходящую от первого участка капсулы датчика, устанавливаемого с возможностью отсоединения в положении датчика, до второго участка капсулы датчика, при этом первый участок капсулы датчика содержит электронику датчика, а второй участок капсулы датчика содержит чувствительный элемент. Этот вариант выполнения улучшает эффективную установку капсулы датчика в положение датчика, так что первый участок капсулы датчика, который содержит вторичную катушку, установлен относительно корпуса, который содержит первичную катушку так, чтобы обеспечить эффективное магнитное соединение между первичной катушкой и вторичной катушкой. В то же время второй участок капсулы датчика может быть расположен относительно текучей среды, свойства которой должны быть восприняты чувствительным элементом.
[23] Возможно, погружной насос может иметь по существу цилиндрическую форму, определяющую продольную ось для ориентации по существу вдоль вертикального направления во время работы насоса, и иметь нижний конец, причем датчик положения расположен на внешней поверхности нижнего конца корпуса погружного насоса для эффективной установки узла погружного насоса.
[24] Возможно, капсула датчика может содержать электронику датчика в герметично уплотненном кожухе, при этом электроника датчика выполнена с возможностью генерации команды управления насосом, например команды включения/выключения или команды скорости насоса, и беспроводной передачи указанной команды управления насосом от вторичной катушки через корпус и кожух к первичной катушке. Этот вариант выполнения улучшает управление погружным насосом. Погружной насос может управляться в зависимости от свойств жидкости, в которую погружен узел насоса, и которая воспринимается капсулой датчика.
[25] В соответствии с другим аспектом настоящего изобретения предложен способ эксплуатации узла погружного насоса, содержащий следующие этапы, на которых:
- устанавливают капсулу датчика с герметично уплотненным кожухом в положении датчика, расположенном на внешней поверхности корпуса погружного насоса, так, чтобы первичная катушка внутри корпуса и вторичная катушка внутри кожуха были расположены индуктивно соединенными друг с другом, и
- передают по беспроводной связи данные и/или мощность посредством индуктивной связи между первичной катушкой и вторичной катушкой через корпус и кожух.
[26] Герметично уплотненная капсула датчика может быть установлена на внешней поверхности корпуса для установки в положении датчика для связи первичной катушки и вторичной катушки для передачи мощности и/или данных. Индуктивное соединение между катушками позволяет герметично уплотнить капсулу датчика и можно обойтись без любых кабелей или проводов для передачи данных и/или мощности в и/или из капсулы датчика.
[27] Электроника узла погружного насоса содержит первичную катушку, которая расположена в корпусе насоса, и вторичную катушку, которая расположена в кожухе датчика. При установке капсулы датчика на внешней поверхности корпуса насоса первичная катушка и вторичная катушка могут быть соединены для индуктивной передачи мощности и/или данных.
[28] Возможно, этап беспроводной передачи данных и/или мощности может содержать этап, на котором генерируют рабочие частоты первичной катушки в диапазоне от 0,5 кГц до 200 кГц, предпочтительно в диапазоне от 1 кГц до 100 кГц, более предпочтительно в диапазоне от 5 кГц до 50 кГц, чтобы обеспечить особенно эффективное индуктивное соединение между первичной катушкой и вторичной катушкой, при этом считается, что корпус насоса и кожух датчика расположены между первичной катушкой и вторичной катушкой, и при этом кожух датчика и/или корпус насоса могут быть выполнены из электропроводящих материалов.
[29] Возможно, способ может дополнительно содержать этапы, на которых сканируют рабочие частоты и находят рабочую частоту, удовлетворяющую первому условию, согласно которому эффективность передачи мощности выше минимальной эффективности передачи мощности, и удовлетворяющую второму условию, согласно которому отношение сигнал/шум выше минимального отношения сигнал/шум. Это повышает эффективность передачи, которая может зависеть от точного положения капсулы датчика при установке в положении датчика. Сканирование рабочих частот и определение рабочей частоты, которая удовлетворяет первому условию и второму условию, может быть частью так называемого «рукопожатия» между погружным насосом и капсулой датчика, и которое предпочтительно предшествует фактической передаче мощности и/или данных между погружном насосом и капсулой датчика. Сканирование рабочих частот и определение рабочей частоты могут повторяться во время работы узла погружного насоса, когда какое-либо из условий больше не выполняется.
[30] Возможно, способ может дополнительно содержать этап, на котором генерируют команды управления насосом, например команды включения/выключения или команды скорости насоса, с помощью электроники датчика в герметично уплотненном кожухе капсулы датчика, и при этом беспроводная передача данных и/или мощности содержит этап, на котором отправляют указанную команду управления насосом от вторичной катушки к насосу первичной катушки. Этот вариант выполнения улучшает управление погружным насосом. Погружной насос может управляться в зависимости от свойств жидкости, в которую погружен узел насоса, и которая воспринимается капсулой датчика.
[31] Возможно, этап установки может инициировать загрузку данных, таких как конфигурация насоса или обновление программного обеспечения, от вторичной катушки к первичной катушке. Таким образом, такие данные могут автоматически загружаться в насос путем установки датчика. Датчик может, например, запросить насос, если требуется обновление программного обеспечения, и начать загрузку обновления, если это необходимо.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
[32] Варианты выполнения настоящего изобретения теперь будут описаны в качестве примера со ссылкой на следующие фигуры, на которых:
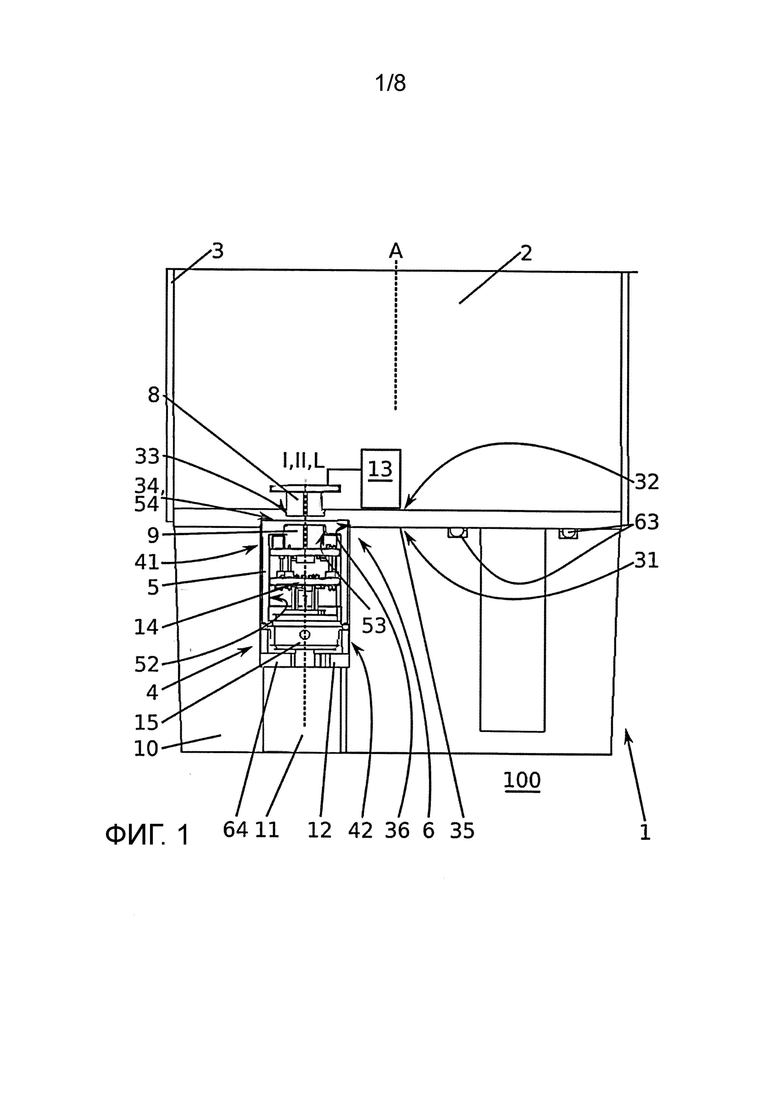
На Фиг.1 показан частичный продольный вид в разрезе узла погружного насоса, раскрытого здесь;
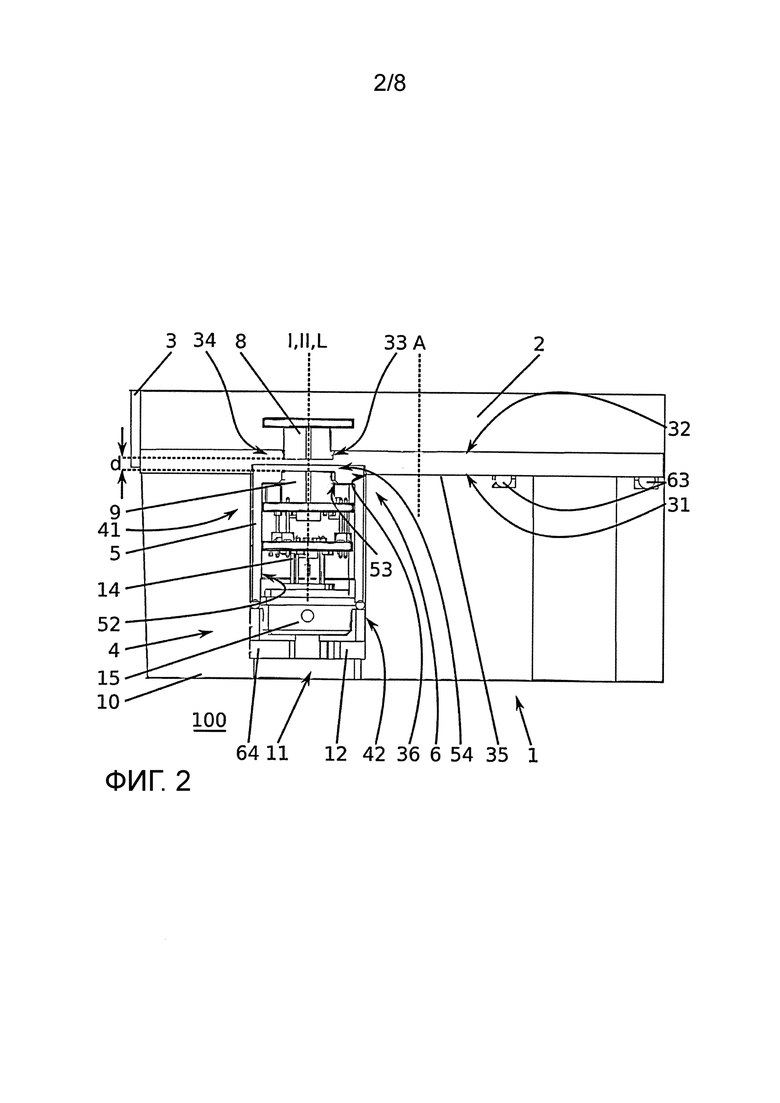
На Фиг. 2 показан увеличенный вид узла погружного насоса, показанного на Фиг.1;
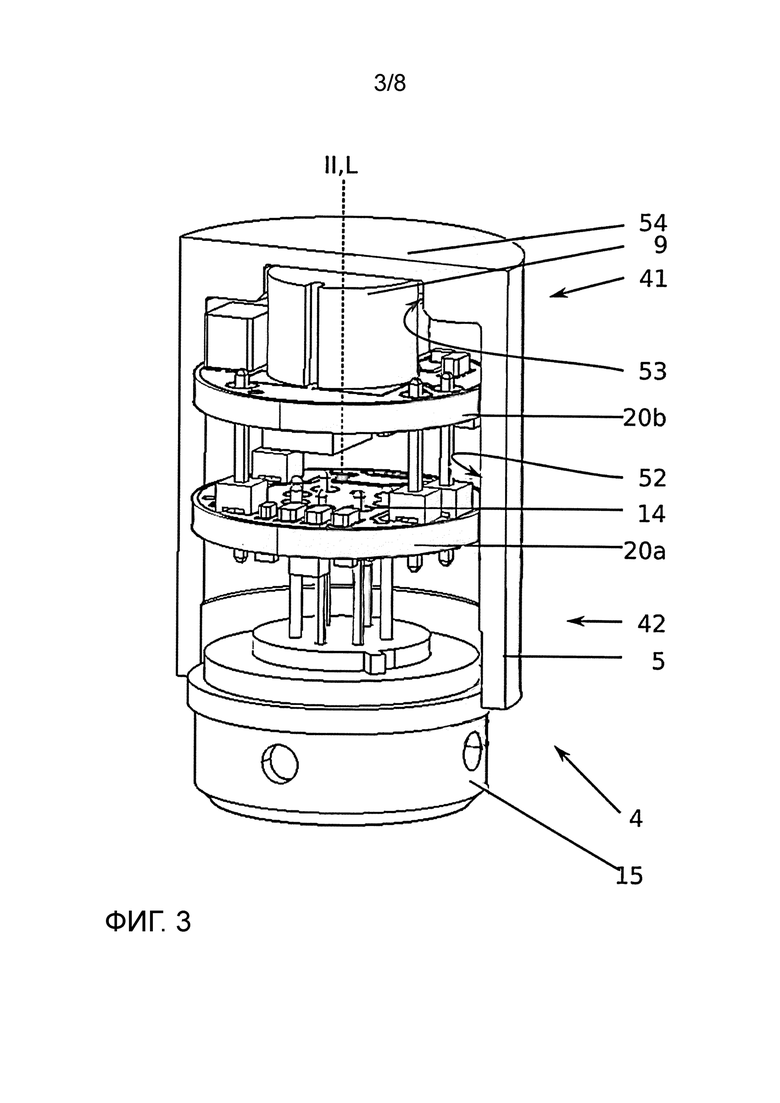
На Фиг. 3 показан вид в изометрии с частичным разрезом капсулы датчика, показанной на Фиг. 1 и 2;
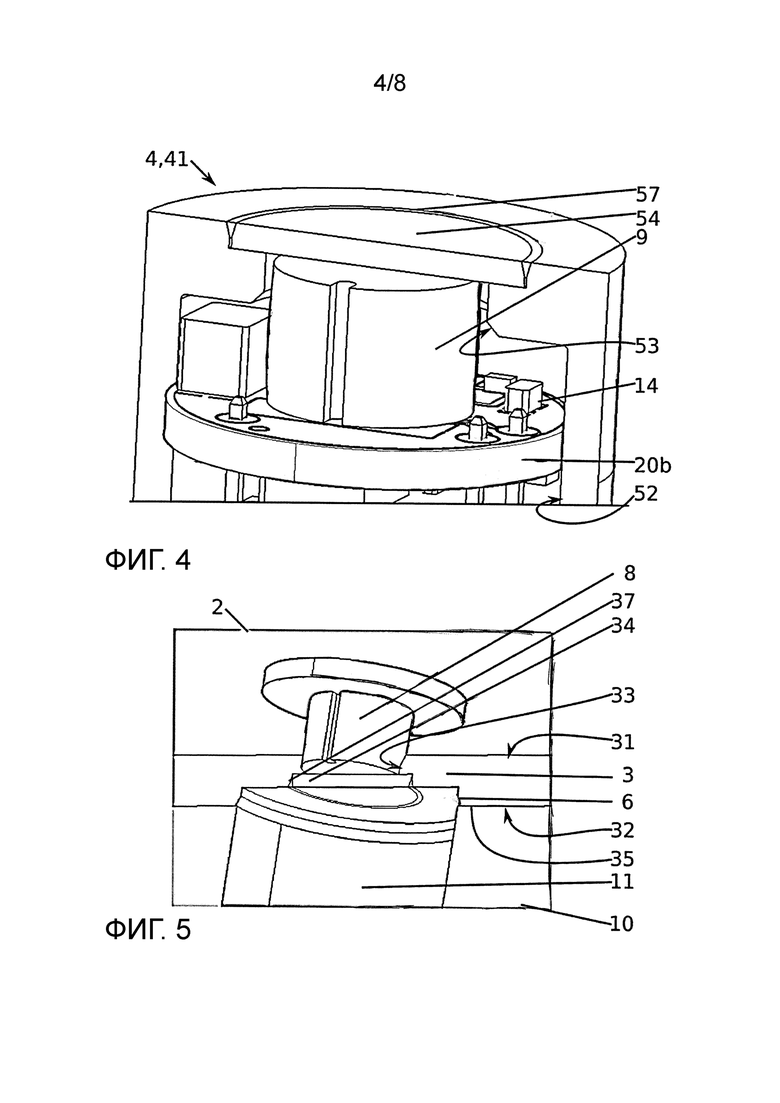
На Фиг. 4 показан вид в изометрии с частичным разрезом наполовину альтернативного варианта выполнения капсулы датчика, раскрытого в данном документе;
На Фиг. 5 показан вид в изометрии с частичным разрезом альтернативного варианта выполнения погружного насоса, раскрытого в данном документе;
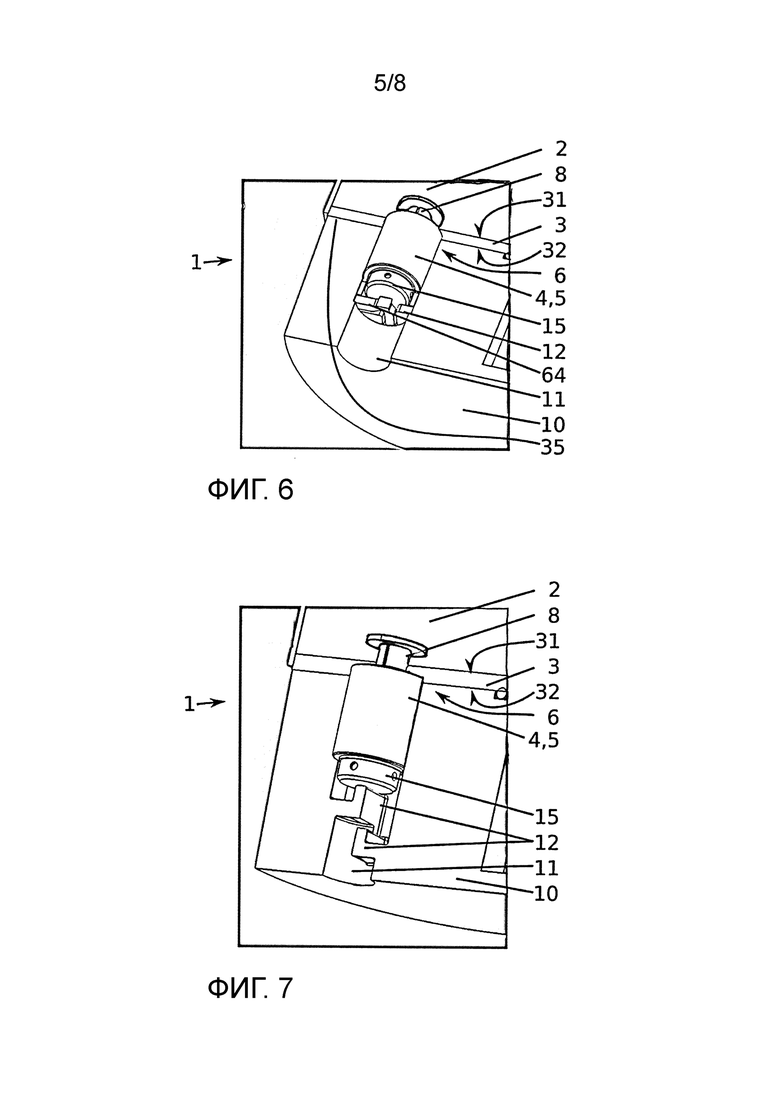
На Фиг. 6-8 показан вид в изометрии с частичным разрезом различных вариантов выполнения погружного насоса, раскрытых с различными вариантами выполнения фиксирующих элементов;
На Фиг. 9 схематически показан вариант выполнения электроники узла погружного насоса, раскрытого в данном документе;
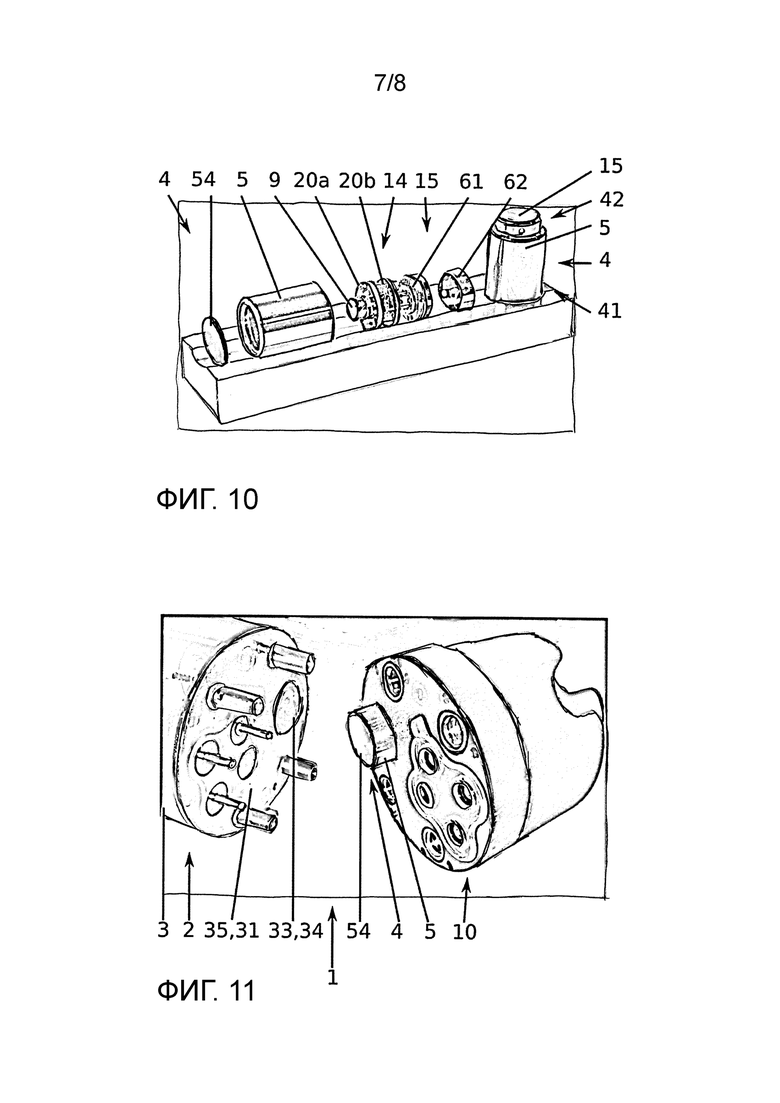
На Фиг. 10 показан вид в изометрии разобранного и собранного варианта выполнения капсулы датчика, раскрытой в данном документе;
На Фиг. 11 показан подробный вид в изометрии погружного насоса, раскрытого в данном документе, с отсоединенной капсулой датчика; и
На Фиг. 12 схематически показана альтернативная интеграция капсулы датчика.
ПОДРОБНОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[33] На Фигуре 1 показан узел 1 погружного насоса. Узел 1 погружного насоса содержит погружной насос 2 с корпусом 3. Узел 1 погружного насоса выполнен с возможностью погружения в жидкость 100, например воду, в частности пресную и/или морскую воду. Жидкость 100 оказывает давление на компоненты узла 1 погружного насоса. Погружной насос 2 и корпус 3 выполнены с возможностью выдерживания давления, которое оказывает жидкость 100, в которой узел 1 погружного насоса находится или должен быть погружен. Погружной насос 2 выполнен с возможностью перекачивания жидкости 100.
[34] Узел 1 погружного насоса дополнительно содержит капсулу 4 датчика с герметично уплотненным кожухом 5. Герметичное уплотнение кожуха 5 гарантирует, что капсула 4 датчика погружается в жидкость 100, в то время как капсула 4 датчика может выдерживать давление в жидкости 100 без попадания какой-либо жидкости 100 в капсулу 4 датчика и/или без какой-либо проблемы с влажностью в капсуле. Кожух 5 полностью покрывает компоненты внутри капсулы 4 датчика, например, электронику 14 датчика и чувствительный элемент 15. Чувствительный элемент 15 может быть выполнен с возможностью определения по меньшей мере одного из следующих свойств: давления, температуры, солености, pH и/или концентрации другого вещества, которое присутствует в жидкости 100. Чувствительный элемент 15 также может содержать акселерометр и/или датчик ориентации.
[35] Погружной насос 2 содержит первичную катушку 8 внутри корпуса 3, а капсула 4 датчика содержит вторичную катушку 9 внутри кожуха 5. Первичная катушка 8 и вторичная катушка 9 выполнены с возможностью индуктивного соединения (связи) друг с другом для беспроводной передачи данных и/или мощности через корпус 3 и кожух 5, когда капсула 4 датчика установлена в положении 6 датчика. Положение 6 датчика расположено так, что гарантируется эффективная передача данных и/или мощности между погружным насосом 2 и капсулой 4 датчика, то есть между первичной катушкой 8 и вторичной катушкой 9. В этом варианте выполнения положение 6 датчика геометрически определяется углублением 36 в наружном корпусе на внешней поверхности 31 корпуса 3 и/или фиксирующим элементом 10, который прикреплен к нижнему концу 35 корпуса 3.
[36] Корпус 3 имеет внутреннюю поверхность 32, а внутренняя поверхность 32 содержит углубление 33 в корпусе, причем первичная катушка 8 расположена в углублении 33 в корпусе. Углубление 33 в корпусе улучшает выравнивание первичной катушки 8 относительно положения датчика 6 и улучшает возможность установки первичной катушки 8 внутри корпуса 3. Предпочтительно углубление 33 в корпусе содержит по существу цилиндрическую форму с боковой поверхностью и плоским основанием, при этом первичная катушка 8 охвачена по периферии боковой поверхностью и выровнена относительно плоского основания. То есть первичная катушка 8 содержит первичную магнитную ось I, а магнитная ось I перпендикулярна плоскому основанию углубления 33 в корпусе.
[37] Кожух 5 имеет внутреннюю поверхность 52, а внутренняя поверхность 52 содержит углубление 53 в кожухе, в котором вторичная катушка 9 расположена в углублении 53 в кожухе. Углубление 53 в кожухе улучшает выравнивание вторичной катушки 9 относительно первичной катушки 8, когда капсула 4 датчика установлена в положении 6 датчика, и улучшает возможность установки вторичной катушки 9 в кожухе 5. Предпочтительно углубление 53 в кожухе имеет по существу цилиндрическую форму с боковой поверхностью и плоским основанием, причем вторичная катушка 8 охвачена по периферии боковой поверхностью и выровнена относительно основания. То есть вторичная катушка 9 содержит вторичную магнитную ось II, а магнитная ось II перпендикулярна плоскому основанию углубления 53 в кожухе.
[38] Корпус 3 содержит внешнее углубление 36 в корпусе на внешней поверхности 31 корпуса 3 для улучшения возможности установки капсулы 4 датчика в положении 6 датчика. Предпочтительно наружное углубление 36 в корпусе имеет форму, которая соответствует форме кожуха 5. Например, если кожух 5 имеет цилиндрическую форму, углубление 36 в наружном корпусе также имеет цилиндрическую форму с такими размерами, что капсула 4 датчика может быть по меньшей мере частично вставлена в углубление 36 в наружном корпусе. В положении 6 датчика вторичная магнитная ось II расположена параллельно первичной магнитной оси I, когда капсула 4 датчика установлена в положении 6 датчика. Это позволяет особенно эффективно передавать мощность и/или данные между первичной катушкой 8 и вторичной катушкой 9.
[39] Узел 1 погружного насоса содержит фиксирующий элемент 10. Фиксирующий элемент 10 содержит канал 11. Канал 11 имеет такие пропорции, что капсула 4 датчика может быть направлена через канал 11 и установлена в положении 6 датчика. В положении 6 датчика капсула 4 датчика охватывается фиксирующим элементом 10 и поддерживается установочным элементом 64. Установочный элемент 64 помогает направить капсулу 4 датчика в положение 6 датчика и может зафиксировать капсулу 4 датчика в положении 6 датчика. Установочный элемент 64 может быть отделен от фиксирующего элемента 10 и может быть подвижным, то есть смещаемым и/или вращающимся, из проходного положения, позволяющего капсуле 4 датчика перемещаться по каналу 11 в заблокированное положение, фиксирующее капсулу 4 датчика в положении 6 датчика. Установочный элемент 64 может быть изготовлен из упругого материала и/или содержать пружину, в частности, для фиксации капсулы 4 датчика в положении 6 датчика. Установочный элемент 64 может быть выполнен с возможностью съемной установки капсулы 4 датчика в положении 6 датчика в канале 11.
[40] Корпус 3 и/или фиксирующий элемент 10 содержит по меньшей мере один крепежный элемент, который выполнен с возможностью прикрепления фиксирующего элемента 10 к нижнему концу 35 корпуса 3. Например, крепежный элемент может содержать по меньшей мере один выступ, углубление и/или блокировочное устройство, которое расположено на нижнем конце 35 корпуса 3 и выполнено с возможностью крепления фиксирующего элемента 10. Крепежный элемент может использоваться для облегчения крепления корпуса 3 и фиксирующего элемента 10 и/или улучшения совмещения фиксирующего элемента 10 относительно корпуса 3, так что капсула 4 датчика может быть установлена в положении 6 датчика. Крепежный элемент может быть выполнен с возможностью съемной установки фиксирующего элемента 10 и корпуса 3. Уплотнительное кольцо 63 установлено между корпусом 3 и/или фиксирующим элементом 10.
[41] Капсула 4 датчика установлена с возможностью отсоединения в положении датчика 6 на внешней поверхности 31 корпуса 3 погружного насоса 2. Съемная установка капсулы 4 датчика в положении 6 датчика достигается за счет съемной установки фиксирующего элемента 10 на корпусе 3 погружного насоса 2 и/или съемной установки капсулы 4 датчика в канале 11 фиксирующего элемента 10.
[42] Узел 1 погружного насоса содержит электронный блок 13 управления, который показан только схематично и расположен внутри или у погружного насоса 2, например, внутри корпуса 3, как показано на Фигуре 1, или на внешней поверхности 31 корпуса 3 (не показано). Электронный блок 13 управления выполнен с возможностью сканирования частоты работы первичной катушки для работы первичной катушки 8 и его работа подробно поясняется со ссылкой на Фигуру 9.
[43] Капсула 4 датчика содержит электронику 14 датчика в герметично уплотненном кожухе 5, так что электроника 14 датчика защищена от воды, и/или механических, и/или тепловых напряжений. Электроника 14 датчика, в частности, выполнена с возможностью управления измерений чувствительного элемента 15 и связи с погружным насосом 2. Электроника 14 датчика подробно поясняется со ссылкой на Фигуру 9.
[44] На Фигуре 2 показан увеличенный вид узла 1 погружного насоса по Фигуре 1.
[45] Погружной насос 2 имеет по существу цилиндрическую форму, которая определяет продольную ось А для ориентации по существу вдоль вертикального направления во время работы насоса. Погружной насос 2 имеет нижний конец 35, а датчик положения 6 расположен на внешней поверхности 31 нижнего конца 35. Нижний конец 35 может быть приварен к остальной части корпуса 3 для герметичного закрытия объема внутри насоса 2. Предпочтительно нижний конец 35 и/или корпус 3 выполнен из металла.
[46] Капсула 4 датчика имеет по существу цилиндрическую форму и определяет продольную ось L, которая проходит от первого участка 41 капсулы датчика до второго участка 42 капсулы датчика, причем первый участок 41 капсулы датчика установлен с возможностью отсоединения в положении 6 датчика. Продольная ось L параллельна и совпадает со второй магнитной осью II вторичной катушки 9 для достижения улучшенной эффективности передачи. В положении 6 датчика вторая магнитная ось II соосно выровнена с первичной магнитной осью I первичной катушки 8, чтобы обеспечить эффективную магнитную связь между первичной катушкой 8 и вторичной катушкой 9. Выравнивание магнитных осей I, II облегчается выравниванием продольной оси L капсулы 4 датчика и продольной оси A погружного насоса 2, которые выровнены, когда капсула 4 датчика установлена в положении 6 датчика. Параллельное выравнивание продольных осей A, L поддерживается формой фиксирующего элемента 10 и канала 11, причем канал 11 имеет по существу цилиндрическую форму и определяет продольную ось, параллельную продольной оси L погружного насоса 2, когда фиксирующий элемент 10 прикреплен к погружному насосу 2.
[47] Вторичная катушка 9 может собирать мощность, которая излучается от первичной катушки 8, и наоборот. Передача мощности осуществляется посредством индукции. Индуцированное поле проходит через секции 34, 54 интерфейса корпуса 3 и кожуха 5 соответственно. Таким образом, индуцированное поле проходит через два слоя, которые образуются корпусом 3 насоса и кожухом 5 датчика. Корпус 3 содержит секцию 34 передачи корпуса, которая расположена у углубления 33 в корпусе. Кожух 5 содержит секцию 54 передачи кожуха, которая расположена у углубления 53 в кожухе. Секции 34, 54 передачи выполнены из материала, например, нержавеющей стали, которая подходит для обеспечения герметичного уплотнения капсулы 4 датчика и обеспечивает эффективное магнитное соединение между первичной катушкой 8 и вторичной катушкой 9. Расстояние d между первичной катушкой 8 и вторичной катушкой 9 составляет менее 5 мм, предпочтительно менее 3 мм, когда капсула 4 датчика установлена в положении 6 датчика.
[48] На Фигуре 3 показана капсула 4 датчика, показанная в положении 6 датчика на Фигурах 1 и 2. Кожух 5 капсулы 4 датчика предпочтительно выполнен из нержавеющей стали и/или содержит секции, которые выполнены из нержавеющей стали. Капсула 4 датчика может содержать гибкий демпфирующий элемент (не показан), который расположен между вторичной катушкой 9 и кожухом 54 для поглощения механического напряжения, вызванного тепловым расширением, вибрацией и/или давлением, чтобы избежать высоких напряжений в компонентах капсулы 4 датчика.
[49] Кожух 5 выполнен в виде одной части, причем несколько секций сварены вместе. Кожух 5 также может содержать несколько частей, как показано на Фигуре 4; например, одна часть может составлять участок 54 интерфейса кожуха 5, который имеет более низкую относительную магнитную проницаемость и/или более низкую электрическую проводимость, чем остальная часть кожуха 5, чтобы уменьшить электромагнитные потери электромагнитного поля, которое проходит через секцию 54 интерфейса, когда первичная катушка 8 и вторичная катушка 9 индуктивно соединены.
[50] Как показано на Фигуре 3, секция 54 передачи выполнена из того же материала, что и кожух 5. Для улучшения электромагнитного соединения вторичной катушки 9 с первичной катушкой 2 в погружном насосе 2 и для облегчения выравнивания вторичной катушки 9 кожух 5 содержит углубление 53 в кожухе, которое имеет толщину стенки меньше, чем толщина остальных стенок кожуха 5. Из-за уменьшенной толщины стенки кожуха 5 в углублении 53 в кожухе электромагнитное излучение защищено очень плохо, и возможно эффективное индуктивное соединение вторичной катушки 9 с первичной катушкой 8.
[51] Электроника 14 датчика или по меньшей мере один из ее компонентов может содержаться и/или размещаться на одной или нескольких печатных платах 20a, 20b. Предпочтительно печатные платы 20a, 20b имеют размер, который меньше размера чувствительного элемента 15, чтобы обеспечить сборку капсулы датчика с одного конца и тем самым сделать необходимым только один сварочный шов. Капсула 5 датчика может быть собрана путем первого введения вторичной катушки 9 в кожух 5 с помощью перемещения вторичной катушки вдоль продольной оси L к первому участку 41 капсулы датчика, пока вторичная катушка 9 не достигнет углубления 53 в кожухе. Затем печатные платы 20a, 20b вводятся в кожух 5 путем перемещения печатных плат 20a, 20b вдоль продольной оси L в направлении вторичной катушки 9, так что печатные платы 20a, 20b достигают положения, которое определяется посредством геометрии внутренней части кожуха и так, что печатные платы 20a, 20b поддерживаются внутренней поверхностью 52 капсулы 4 датчика. Наконец, капсула 4 датчика может быть закрыта и герметично уплотнена путем прикрепления чувствительного элемента 15 ко второму участку 42 капсулы датчика. В этом примере капсула 4 датчика содержит две печатные платы 20a, 20b. В альтернативных вариантах выполнения капсула 4 датчика может содержать одну или более двух печатных плат 20a, 20b. Печатные платы 20a, 20b пространственно отделены друг от друга, но электрически связаны друг с другом. Печатные платы 20a, 20b, вторичная катушка 9 и/или чувствительный элемент 15 также могут быть собраны и испытаны отдельно для получения набора калибровочных данных перед вводом в кожух 5 и перед использованием в узле 1 погружного насоса.
[52] На Фигуре 4 показан альтернативный вариант выполнения капсулы 4 датчика, который будет пояснен в отношении отличий от варианта выполнения капсулы 4 датчика, который показан на Фигурах 1-3. Секция 54 передачи кожуха выполнена из материала, отличного от материала кожуха 5. Например, кожух 5 может быть изготовлен из нержавеющей стали, а секция 54 передачи кожуха может быть изготовлена из металла с электропроводностью меньше, чем у нержавеющей стали, металла с относительной магнитной проницаемостью ниже 5, предпочтительно ниже 2, стекла, керамики и/или их композиций. Секция 54 передачи кожуха, которая также может называться мембраной, которая гарантирует, что герметичное уплотнение капсулы 4 датчика не нарушено и что электромагнитное соединение первичной катушки 8 и вторичной катушки 9 гарантируется, когда капсула 5 датчика установлена в положении 6 датчика. Кожух 5, выполненный из полимера, не предназначен для герметичного уплотнения, когда капсула 4 датчика погружена в воду. Секция 54 передачи кожуха расположена в верхней пластине цилиндрической капсулы 5 датчика в первом участке 41 капсулы датчика.
[53] Чтобы улучшить герметичное уплотнение капсулы 4 датчика и/или облегчить установку капсулы 4 датчика, капсула 4 датчика может содержать уплотнительный элемент 57, который расположен между кожухом 5 и секцией 54 передачи кожуха. Уплотнительный элемент 57 может быть изготовлен из упругого материала для поглощения механического напряжения, вызванного вибрациями и/или тепловым расширением любого компонента капсулы 4 датчика и/или погружного насоса 2.
[54] На Фигуре 5 показан альтернативный вариант выполнения погружного насоса 2 с фиксирующим элементом 10, который будет объяснен в отношении отличий от варианта выполнения, который показан на Фигурах 1 и 2. Секция 34 передачи корпуса выполнена из материала, отличного от корпуса 3. Например, корпус 3 может быть изготовлен из нержавеющей стали, а секция 34 передачи корпуса может быть изготовлен из металла с электропроводностью меньше, чем у нержавеющей стали, металла с относительной магнитной проницаемостью ниже 5, предпочтительно ниже 2, из стекла, керамики и/или их композиции. Секция 34 передачи корпуса гарантирует, что герметичное уплотнение погружного насоса 2 не нарушено и что электромагнитное соединение первичной катушки 8 и вторичной катушки 9 гарантируется, когда капсула 5 датчика установлена в положении 6 датчика. Секция 34 передачи кожуха корпуса расположена на нижнем конце 35 корпуса 3.
[55] Для улучшения герметичного уплотнения корпуса 3 и/или для облегчения установки корпуса 3 корпус 3 может содержать уплотнительный элемент 37, который расположен между корпусом 3 и секцией 34 передачи корпуса. Уплотнительный элемент 37 может быть изготовлен из упругого материала для поглощения механического напряжения, вызванного вибрациями и/или тепловым расширением любого компонента капсулы 4 датчика и/или погружного насоса 2.
[56] На Фигурах 6-8 показан вариант выполнения фиксирующего элемента 10, который прикреплен к погружному насосу 2 каждый. Окружающая среда, в частности жидкость 100, может достигать чувствительного элемента 15 через один или несколько каналов 11. Канал 11 или каналы 11 проходят через фиксирующий элемент 10. Альтернативно, канал 11 также может проходить между фиксирующим элементом 10 и нижним концом 35. Фиксирующий элемент 10 содержит по меньшей мере одно препятствие 12, которое расположено в канале 11 и которое влияет на сообщение по текучей среде между капсулой 4 датчика и текучей средой 100, в которую погружен погружной насос 2.
[57] На Фигуре 6 фиксирующий элемент 10 содержит установочный элемент 64, который облегчает установку капсулы 4 датчика в положении 6 датчика. Препятствие 12 защищает капсулу 4 датчика, например, от частиц, которые взвешены в жидкости 100 и могут быть удалены. Установочный элемент 64 и препятствие 12 могут быть помещены в канал 11 после того, как капсула 4 датчика перемещается по каналу, пока капсула 4 датчика не достигнет положения 6 датчика на нижнем конце 35 корпуса 3.
[58] На Фигуре 7 фиксирующий элемент 10 содержит два препятствия 12, которые расположены в канале 11. Препятствия 12 расположены диаметрально противоположно друг другу в канале 11, что обеспечивает особенно эффективную защиту чувствительного элемента 15 от частиц, которые могут присутствовать в жидкости 100, в которую должен погружаться узел 1 погружного насоса. Каждое из препятствий 12 содержит выступ, который проходит от боковой стенки по существу цилиндрического канала 11 к внутренней части канала 11, и выступ, перпендикулярный выступу, так что частицы в жидкости 100 могут осаждаться на препятствии 12. В этом варианте выполнения капсула 4 датчика может быть вставлена в канал 11 до того, как фиксирующий элемент 10 будет прикреплен к корпусу 3 погружного насоса 2. Капсула 4 датчика может быть демонтирована, когда фиксирующий элемент 10 отсоединен от корпуса 3, и препятствия 12 могут быть очищены для удаления частиц осадка.
[59] Фигура 8 будет описана в отношении отличий от варианта выполнения по Фигуре 7. На Фигуре 8 фиксирующий элемент 10 содержит более одного канала 11. Дополнительный канал выполнен с возможностью улучшения потока жидкости 100 около капсулы 4 датчика, так что тепло от капсулы 4 датчика может передаваться жидкости 100. Это может улучшить охлаждение капсулы 4 датчика во время работы и особенно выгодно, когда капсула 4 датчика выполнена с возможностью измерения температуры.
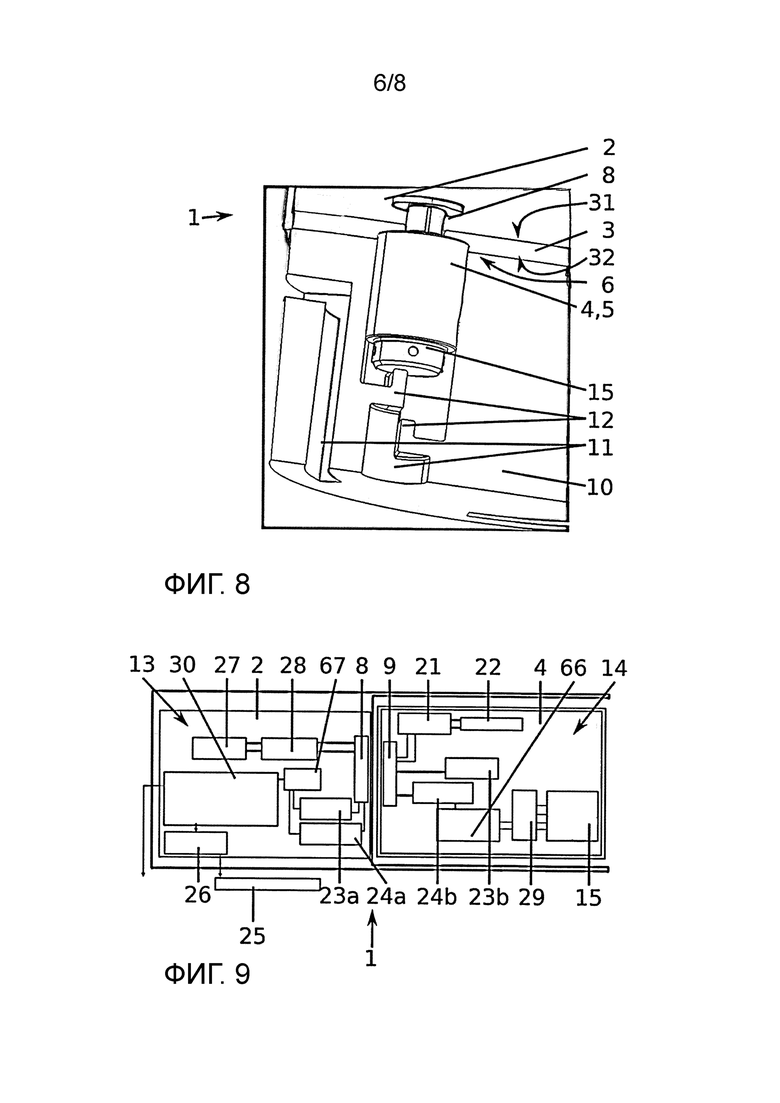
[60] На Фигуре 9 показана схема электроники узла 1 погружного насоса, как объяснено со ссылкой на Фигуры 1-3. Мощность и/или данные передаются через резонансные контуры, которые содержат первичную катушку 8 погружного насоса 2 и вторичную катушку 9 капсулы 4 датчика.
[61] Погружной насос 2 содержит электронный блок 13 управления с источником 27 питания, драйвер 28 мощности, микроконтроллер 30, драйвер катушки для управления первичной катушкой 8 и последовательный резонансный контур с первичной катушкой 8.
[62] Источник 27 питания может быть источником низкого напряжения, например, 5 В, <200 мА, который снабжает микроконтроллер 30 и резонансный контур. Микроконтроллер 30 выполнен с возможностью обработки запуска путем нахождения оптимальной частоты возбуждения полумоста и/или первичной катушки 8 так, чтобы он соответствовал оптимальной частоте резонансного контура для передачи мощности и/или данных. Электронный блок 13 управления выполнен с возможностью сканирования частот работы первичной катушки для работы первичной катушки 8 на частоте, удовлетворяющей первому условию, согласно которому эффективность передачи мощности при индуктивной передаче мощности между первичной катушкой 8 и вторичной катушкой 9 выше минимальной эффективности передачи мощности и удовлетворяющей второму условию, согласно которому отношение сигнал/шум выше минимального отношения сигнал/шум. Частота работы первичной катушки находится в диапазоне от 0,5 кГц до 200 кГц, предпочтительно в диапазоне от 1 кГц до 100 кГц, более предпочтительно в диапазоне от 5 кГц до 50 кГц для беспроводной передачи данных и/или мощности между погружным насосом 2 и капсулой 5 датчика.
[63] Электронный блок 13 управления содержит устройство 23а модуляции и устройство 24а демодуляции для выполнения модуляции и/или демодуляции связи с капсулой 4 датчика и от нее, причем устройство 23а модуляции и устройство 24а демодуляции электрически соединены с микроконтроллером 30 и первичной катушкой 8. Микроконтроллер 30 может содержать или быть электрически соединенным с устройством 26 связи, которое образует интерфейс с интерфейсом 25 управления, например интерфейс UART, с другими устройствами, такими как электроника, которая управляет погружным насосом 2. Полумостовой драйвер выполнен с возможностью управления питанием резонансного контура и первичной катушки 8 с частотой, передаваемой с микроконтроллера 30. Микроконтроллер 30 может быть выполнен с возможностью выполнения процедур, чтобы определять, работает ли погружной насос 2 всухую, то есть без какой-либо жидкости 100, и/или для улучшения компенсации допуска для компенсации, например, эффектов смещения капсулы 4 датчика в положении 6 датчика. Электронный блок 13 управления содержит накопитель 67 данных, который соединен с микроконтроллером 30, устройством 23а модуляции и устройством 24b демодуляции. В накопителе 67 данных могут храниться данные, которые должны быть отправлены от погружного насоса 2 в капсулу 4 датчика и/или приняты от капсулы 4 датчика погружным насосом 2.
[64] Электроника 14 датчика капсулы 4 датчика содержит источник 21 питания капсулы датчика, возможный накопитель 22 мощности, устройство 23b модуляции и устройство 24b демодуляции, контроллер 66 датчика, чувствительное устройство 15, преобразователь 29 сигналов и, возможно, память для хранения информации, которая, в частности, может быть считана и/или записана без кабелей или открытия кожуха 5.
[65] Источник 21 питания датчика снабжает электронику 14 датчика электрической мощностью, которая может передаваться в источник 22 питания от погружного насоса 2 через первичную катушку 8 и вторичную катушку 9 и/или от накопителя 22 мощности. Источник 21 питания преобразует переменный ток как принимаемый посредством передачи мощности и/или данных от погружного насоса 2 в постоянный ток с использованием выпрямителя. Электрическая энергия постоянного тока накапливается в конденсаторе и превращается в регулируемое напряжение, которое снабжает электронику датчика 14.
[66] Чувствительное устройство (датчик) 15 воспринимает аналоговый сигнал путем измерения свойства жидкости 100, в которую должен быть погружен узел 1 погружного насоса. Аналоговый сигнал направляется в преобразователь 29 сигналов, который преобразует аналоговый сигнал в цифровой сигнал и направляет цифровой сигнал в контроллер 66 датчика. Контроллер 66 датчика выполнен с возможностью генерирования команд для выполнения измерений чувствительным устройством 15 и/или для облегчения связи между капсулой 4 датчика и погружным насосом 2.
[67] Связь между капсулой 4 датчика и погружным насосом 2 может быть реализована, например, путем модуляции сигналов связи непосредственно на сигналы передачи мощности с помощью устройств 23а, 23b модуляции. Например, это может быть выполнено с помощью метода амплитудной манипуляции (ask), частотной манипуляции (fsk), фазовой манипуляции (psk) и/или их объединения. Например, связь посредством амплитудной манипуляции может быть достигнута путем включения и выключения первичной катушки 8 по импульсной схеме, то есть путем прямой модуляции излучения электромагнитного поля от первичной катушки 8 и изменения резонансной части резонансного контура в капсуле 4 датчика, что приводит к изменению напряжения на первичной катушке 8. Для приема и оценки принятого сигнала устройства 24а, 24b демодуляции могут демодулировать шаблоны переменного тока в первичной катушке 8 и/или вторичной катушке 9, а микроконтроллер 30 и/или контроллер 66 датчика могут оценивать принятый сигнал и/или команды управления. В качестве альтернативы, связь между капсулой 4 датчика и погружным насосом 2 может быть обеспечена другими известными беспроводными методами, например Bluetooth или другими стандартными методами связи, которые способны проходить через кожух 5 и/или корпус 3.
[68] Электроника 14 датчика выполнена с возможностью генерации команды управления насосом, например команды включения/выключения или команды скорости насоса, и беспроводной передачи указанной команды управления насосом от вторичной катушки 9 через корпус 3 и кожух 5 к первичной катушке 8. Таким образом, электроника 14 датчика может использоваться для управления работой насоса в замкнутом контуре. Электроника 14 датчика содержит параллельный резонансный контур со вторичной катушкой 8, возможно источником 21 питания, контроллером 66 датчика и аналоговым интерфейсом ASSP (стандартное для конкретного приложения продукта). Параллельный резонансный контур согласован с резонансом на той же частоте, что и последовательный резонансный контур в электронном блоке 13 управления, и использует вторичную катушку 9 для преобразования переданного магнитного поля в напряжение с переменным током. Переменный ток преобразуется в регулируемое напряжение с помощью капсульного источника 21 питания датчика для питания остальных компонентов электроники 14 датчика. Аналоговый интерфейс ASSP производит выборку и фильтрацию аналогового выходного напряжения от чувствительного элемента 15, который преобразует измеренную физическую величину в напряжение, которое передается на погружной насос 2. Даже если измерения не выполняются капсулой 4 датчика, капсула 4 датчика может использоваться для снабжения погружного насоса 2 информацией о применении или конфигурации, например, для обновления программного обеспечения погружного насоса 2 без необходимости демонтажа погружного насоса 2.
[69] На Фигуре 10 показан вид в изометрии двух капсул 4 датчика согласно варианту выполнения настоящего изобретения. Капсула 4 датчика слева на Фигуре 10 разобрана, а капсула 4 датчика и справа на Фигуре 10 находится в собранном состоянии. Капсулы 4 датчика поясняются со ссылкой на чертежи на Фигуры 1-3. На Фигуре 10 показано, что чувствительный элемент 15 содержит чувствительную (воспринимающую) электронику 61 и защитную крышку 62. Чувствительная электроника 61 электрически соединена с электроникой 14 датчика, которая расположена на печатных платах 20a, 20b. Защитная крышка 62 выполнена из металла, например нержавеющей стали или пластика, и прижата к кожуху 5. Защитная крыша имеет отверстия, позволяющие жидкости 100, в которую должна быть погружена капсула 4 датчика, обтекать чувствительную электронику 61 для точных измерений свойств жидкости, например, температуру и/или давление.
[70] На Фигуре 11 показан вид в изометрии узла 1 погружного насоса в соответствии с вариантом выполнения настоящего изобретения. Узел 1 погружного насоса поясняется со ссылкой на чертежи на Фигурах 1, 2. Нижний конец 35 погружного насоса 2 приварен к боковой стенке корпуса 3. Нижний конец 35 содержит на внешней поверхности 31 корпуса 3 углубление 33 в корпусе в секции 34 передачи корпуса. Капсула 4 датчика содержит кожух 5, в котором секция 54 передачи кожуха выполнена из материала, отличного от материала кожуха 5. Капсула 4 датчика вводится в фиксирующий элемент 10, и фиксирующий элемент 10 выполнен с возможностью прикрепления к погружному насосу 2. Когда фиксирующий элемент 10 прикреплен к погружному насосу 2, капсула 4 датчика находится в положении 6 датчика (не показано).
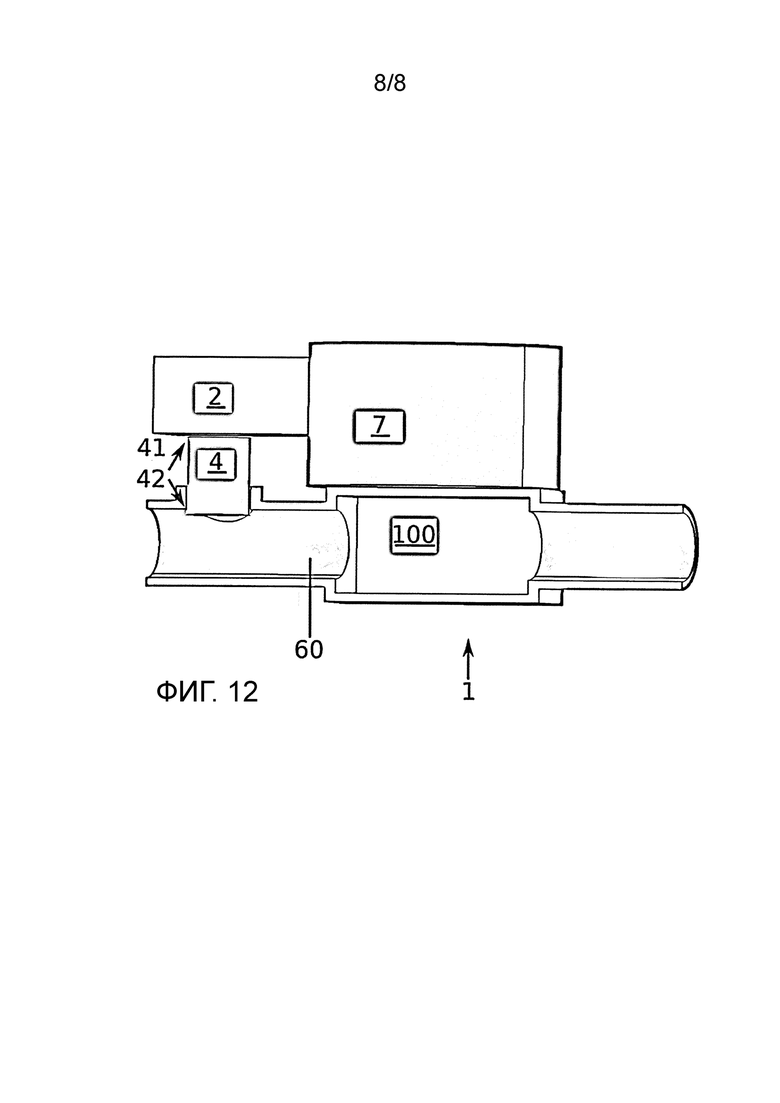
[71] На Фигуре 12 показана альтернативная интеграция капсулы 4 датчика. Капсула 4 датчика может быть встроена и/или подключена к погружному насосу 2 и доставлять измеренную информацию постоянно или по запрос погружного насоса 2. Капсула 4 датчика также может быть использована в качестве отдельного блока и помещена в полый корпус 60 узла 1 погружного насоса, например, в клапан, трубу, фитинг трубы или в другое место, связанное с погружным насосом 2. При этом капсула 4 датчика ориентирована так, что ее второй участок 42 капсулы датчика направлен в сторону полого корпуса 60, чтобы выполнять измерения жидкости 100 внутри полого корпуса 60. Первый участок 41 капсулы датчика ориентирован в направлении погружного насоса 2, и электронный блок 13 управления погружным насосом 2 может управлять управляемым насосным устройством 7, например, для запуска, остановки и/или управления перекачкой жидкости 100.
[72] Если в вышеприведенном описании упоминаются целые числа или элементы, которые имеют известные, очевидные или предсказуемые эквиваленты, то такие эквиваленты включаются в настоящий документ, как если бы они были изложены индивидуально. Следует сделать ссылку на формулу изобретения для определения истинного объема охраны настоящего раскрытия, который следует истолковывать так, чтобы он охватывал любые такие эквиваленты. Читателю также будет понятно, что целые числа или признаки раскрытия, которые описаны как возможные, предпочтительные, выгодные, удобные и т.п., являются возможными и не ограничивают объем охраны независимых пунктов формулы изобретения.
[73] Вышеуказанные варианты выполнения следует понимать как иллюстративные примеры раскрытия. Следует понимать, что любой признак, описанный в отношении любого одного варианта выполнения, может использоваться отдельно или в сочетании с другими описанными признаками, а также может использоваться в сочетании с одним или несколькими признаками любого другого варианта выполнения или любого объединения любого другого варианта выполнения. Хотя по меньшей мере один примерный вариант выполнения был показан и описан, следует понимать, что другие модификации, замены и альтернативы очевидны для специалиста в данной области техники и могут быть изменены без отклонения от объема предмета, описанного в данном документе, и эта заявка предназначена для охвата любых адаптаций или вариаций конкретных вариантов выполнения, обсуждаемых в данном документе.
[74] Кроме того, выражение «содержащий» не исключает другие элементы или этапы, и «один» не исключает множественное число. Кроме того, характеристики или этапы, которые были описаны со ссылкой на один из вышеупомянутых примерных вариантов выполнения, также могут использоваться в сочетании с другими характеристиками или этапами других примерных вариантов выполнения, описанных выше. Этапы способа могут применяться в любом порядке или параллельно или могут составлять часть или более подробную версию другого этапа способа. Следует понимать, что в объем патента должны быть включены все такие модификации, которые разумно и надлежащим образом входят в объем вклада в уровень в данной области техники. Такие модификации, замены и альтернативы могут быть сделаны без отклонения от сущности и объема охраны раскрытия, которые должны определяться из прилагаемой формулы изобретения и ее юридических эквивалентов.
[75] Список ссылочных позиций:
1 узел погружного насоса2 погружной насос3 корпус4 капсула датчика5 кожух6 датчик положения7 управляемое насосное устройство8 первичная катушка9 вторичная катушка10 фиксирующий элемент11 канал12 препятствие13 электронный блок управления14 электроника датчика15 чувствительный элемент 20a, 20b печатная плата 21 источник питания капсулы датчика 22 накопитель мощности 23а, 23b устройство модуляции 24а, 24b устройство демодуляции 25 интерфейс управления26 устройство связи27 источник питания28 драйвер питания29 преобразователь сигналов30 микроконтроллер31 внешняя поверхность32 внутренняя поверхность33 углубление в корпусе34 секция передачи корпуса35 нижний конец36 внешнее углубление в корпусе37 уплотнительный элемент41 первый участок капсулы датчика42 второй участок капсулы датчика52 внутренняя поверхность53 углубление в кожухе54 секция передачи кожуха57 уплотнительный элемент60 полый корпус61 чувствительная электроника62 крышка63 уплотнительное кольцо64 установочный элемент66 контроллер датчика67 накопитель данных100 жидкостьд расстояниеЯ первичная магнитная ось II вторичная магнитная ось A, L продольная ось.
Изобретение относится к узлу (1) погружного насоса и способу его эксплуатации. Узел содержит погружной насос (2) с корпусом (3) и капсулу (4) датчика с герметично уплотненным кожухом (5), в которой капсула (4) датчика установлена с возможностью отсоединения в положении (6) датчика, расположенном на внешней поверхности (7) корпуса (3) погружного насоса (2). Погружной насос (2) содержит первичную катушку (8) внутри корпуса (3), и капсула (4) датчика содержит вторичную катушку (9) внутри кожуха (5). Первичная катушка (8) и вторичная катушка (9) выполнены с возможностью индуктивного соединения друг с другом для беспроводной передачи данных и/или мощности через корпус (3) и кожух (5), когда капсула (4) датчика установлена в положении датчика (6). Выдерживается большое давление текучей среды, механическое напряжение и/или нагрев. Способен обеспечить улучшенную беспроводную связь между компонентами во время работы узла погружного насоса. 2 н. и 19 з.п. ф-лы, 12 ил.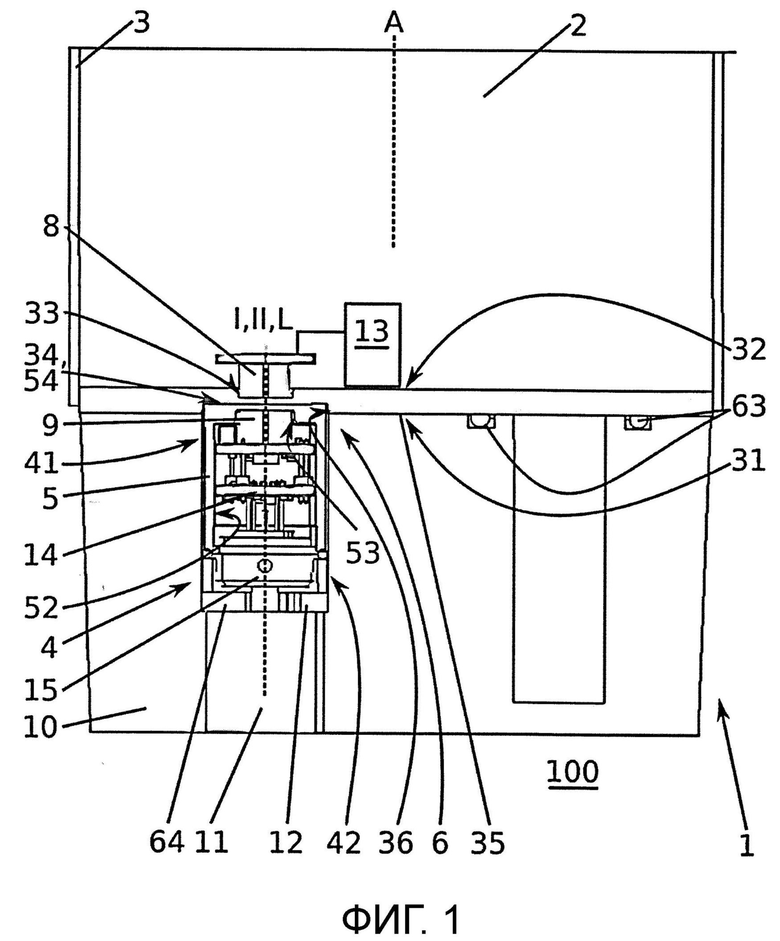
1. Узел (1) погружного насоса, содержащий погружной насос (2) с корпусом (3) и капсулу (4) датчика с герметично уплотненным кожухом (5), причем капсула (4) датчика установлена с возможностью ее отсоединения в положении (6) датчика, расположенном на внешней поверхности (31) корпуса (3) погружного насоса (2), причем погружной насос (2) содержит первичную катушку (8) внутри корпуса (3), а капсула (4) датчика содержит вторичную катушку (9) внутри кожуха (5), при этом первичная катушка (8) и вторичная катушка (9) выполнены с возможностью индуктивной связи друг с другом для беспроводной передачи данных и/или мощности через корпус (3) и кожух (5), когда капсула (4) датчика установлена в положении датчика (6).
2. Узел (1) по п. 1, в котором внутренняя поверхность (32) корпуса (3) содержит углубление (33) корпуса, при этом первичная катушка (8) расположена в углублении (33) корпуса.
3. Узел (1) по любому из пп. 1, 2, в котором внутренняя поверхность (52) кожуха содержит углубление (53) кожуха, причем вторичная катушка (9) расположена в углублении (53) кожуха.
4. Узел (1) по любому из пп. 1-3, в котором расстояние (d) между первичной катушкой (8) и вторичной катушкой (9) составляет менее 5 мм, предпочтительно менее 3 мм, когда капсула (4) датчика установлена в положении датчика (6).
5. Узел (1) по любому из пп. 1-4, в котором первичная катушка (8) имеет первичную магнитную ось (I), а вторичная катушка (9) имеет вторичную магнитную ось (II), причем вторичная магнитная ось (II) соосно и/или параллельно выровнена с первичной магнитной осью (I), когда капсула (4) датчика установлена в положении датчика (6).
6. Узел (1) по любому из пп. 1-5, дополнительно содержит фиксирующий элемент (10), охватывающий капсулу (4) датчика.
7. Узел (1) по п. 6, в котором капсула (4) датчика образует продольную ось (L), проходящую от первого участка (41) капсулы датчика, устанавливаемого с возможностью отсоединения в положении датчика (6), до второго участка (42) капсулы датчика, причем капсула (4) датчика охвачена по периферии фиксирующим элементом (10), и при этом фиксирующий элемент (10) образует канал (11) для сообщения по текучей среде между вторым участком (42) капсулы датчика и окружающей текучей средой (100), в которую погружной насос (1) выполнен с возможностью погружения.
8. Узел (1) по п. 7, в котором фиксирующий элемент (10) содержит фильтр, демпфирующий элемент и/или препятствие (12), расположенные в канале (11) для сообщения по текучей среде между вторым участком (42) капсулы датчика и окружающей текучей средой (100), причем погружной насос (2) выполнен с возможностью погружения.
9. Узел (1) по любому из пп. 6-8, в котором фиксирующий элемент (10) выполнен из пластика или композиционного материала.
10. Узел (1) по любому из пп. 1-9, в котором корпус (3) и/или кожух (5) содержат секцию (34, 54) передачи в положении (6) датчика, причем секция (34, 54) передачи содержит нержавеющую сталь, стекло и/или металл с электропроводностью менее 107 А/(Вм), предпочтительно менее 8 х 106 А/(Вм), более предпочтительно менее 2 х 106 А/(Вм).
11. Узел (1) по любому из пп. 1-10, в котором корпус (3) и/или кожух (5) содержат секцию (34, 54) передачи в положении (6) датчика, причем секция (34, 54) передачи содержит нержавеющую сталь, стекло и/или металл с относительной магнитной проницаемостью ниже 5, предпочтительно ниже 2.
12. Узел (1) по любому из пп. 1-11, дополнительно содержащий электронный блок (13) управления, выполненный с возможностью сканирования частот работы первичной катушки для работы первичной катушки (8) на частоте, удовлетворяющей первому условию, согласно которому эффективность передачи мощности выше минимальной эффективности передачи мощности, и удовлетворяющей второму условию, согласно которому отношение сигнал/шум выше минимального отношения сигнал/шум.
13. Узел (1) по любому из пп. 1-12, в котором кожух (5) капсулы (4) датчика имеет по существу цилиндрическую форму, определяющую продольную ось (L), при этом вторичная катушка (9) определяет магнитную ось (II), параллельную продольной оси (L) кожуха (5).
14. Узел (1) по любому из пп. 1-13, в котором капсула (4) датчика образует продольную ось (L), проходящую от первого участка (41) капсулы датчика, устанавливаемого с возможностью отсоединения в положении датчика (6), до второго участка (42) капсулы датчика, при этом первый участок (41) капсулы датчика содержит электронику (14) датчика, а второй участок (42) капсулы датчика содержит чувствительный элемент (15).
15. Узел (1) по любому из пп. 1-14, в котором погружной насос (2) имеет по существу цилиндрическую форму, определяющую продольную ось (А), для его ориентации по существу вдоль вертикального направления во время работы насоса и имеет нижний конец (34), причем датчик (6) расположен на внешней поверхности (31) нижнего конца (34) корпуса (3) погружного насоса (2).
16. Узел (1) по любому из пп. 1-15, в котором капсула (4) датчика содержит электронику (14) датчика в герметично уплотненном кожухе (5), причем электроника (14) датчика выполнена с возможностью генерации команды управления насосом, например, команды включения/выключения или команды скорости насоса, и с возможностью беспроводной передачи команды управления насосом от вторичной катушки (9) через корпус (3) и кожух (5) к первичной катушке (8).
17. Способ эксплуатации узла (1) погружного насоса, содержащий этапы, на которых:
- устанавливают капсулу (4) датчика с герметично уплотненным кожухом (5) в положении (6) датчика, расположенном на внешней поверхности (31) корпуса (3) погружного насоса (2), так, чтобы первичная катушка (8) внутри корпуса (3) и вторичная катушка (9) внутри кожуха (5) были расположены индуктивно связанными друг с другом, и
- передают по беспроводной связи данные и/или мощность посредством индуктивной связи между первичной катушкой (8) и вторичной катушкой (9) через корпус (3) и кожух (5).
18. Способ по п. 17, в котором этап беспроводной передачи данных и/или мощности содержит этап, на котором генерируют рабочую частоту первичной катушки в диапазоне от 0,5 до 200 кГц, предпочтительно в диапазоне от 1 до 100 кГц, более предпочтительно в диапазоне от 5 до 50 кГц.
19. Способ по любому из пп. 17, 18, дополнительно содержащий этапы, на которых сканируют рабочие частоты и находят рабочую частоту, удовлетворяющую первому условию, согласно которому эффективность передачи мощности выше минимальной эффективности передачи мощности, и удовлетворяющую второму условию, согласно которому отношение сигнал/шум выше минимального отношения сигнал/шум.
20. Способ по любому из пп. 17-19, дополнительно содержащий этап, на котором генерируют команду управления насосом, например, команду включения/выключения или команду скорости насоса, электроникой датчика (14) в герметично уплотненном кожухе (5) капсулы (4) датчика, и при этом этап беспроводной передачи данных и/или мощности содержит этап, на котором отправляют указанную команду управления насосом от вторичной катушки (9) к насосу первичной катушки (8).
21. Способ по любому из пп. 17-20, в котором этап установки инициирует загрузку данных, таких как конфигурация насоса или обновление программного обеспечения, из вторичной катушки (9) в первичную катушку (8).
| СОСТАВ ПОКРЫТИЯ ДЛЯ ЗАЩИТЫ ТВЕРДОСПЛАВНЫХ ИЗДЕЛИЙ ОТ НАУГЛЕРОЖИВАНИЯ ПРИ СПЕКАНИИ | 2009 |
|
RU2432378C2 |
| Способ и система для контроля устройства для подъема жидкости | 2015 |
|
RU2689099C2 |
| ПРОЕКЦИОННОЕ ОПТИКО-ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО | 1964 |
|
SU175663A1 |
| US 9482233 B2, 01.11.2016 | |||
| WO 2006003190, 12.01.2006 | |||
| Многоэмиттерный термокатод и способ его изготовления | 1978 |
|
SU711920A1 |

