ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области лекарственной терапии, области респираторной терапии, области медицинской искусственной вентиляции легких и связанным областям.
УРОВЕНЬ ТЕХНИКИ
Мониторинг дыхания выполняют с целью диагностики заболеваний органов дыхания и при поддержании респираторной терапии, такой как механическая искусственная вентиляции легких. Определение характеристик дыхательного усилия, которое делает пациент, представляет особую важность для оптимизации настроек устройства для искусственной вентиляции легких для различных режимов с поддержкой, таких как искусственная вентиляция с поддержкой давлением (ИВПД). Целью является обеспечение лишь достаточной поддержки для сохранения эффективного дыхания без чрезмерной поддержки пациента, что может привести к эффектам атрофии, травме легких, усложнения снятия устройства для искусственной вентиляции легких с груди пациента, недостаточной поддержки пациента, что может привести к избыточному мышечному утомлению или другим нежелательным эффектам.
Дыхательное усилие может быть выражено количественно различными способами. Как правило, базовый параметр называют давлением Pmus(t) дыхательных мышц, то есть давлением, которое прикладывается к легким диафрагмой пациента и мускулатурой грудной клетки. Работа дыхания (РД) может быть вычислена из интеграла по объему Pmus(t) (т.е. WOB = ∫ Pmus(t)dV) или интеграла по времени произведения Pmus(t) и потока (т.е. WOB = ∫ Pmus(t)V(t)dt) за одно дыхательное движение, тогда как сила дыхания (СД) может быть вычислена из интеграла по объему Pmus(t) или интеграла по времени произведения Pmus(t) и потока в единицу времени (например, в минуту, тем самым охватывая несколько дыхательных движений). Таким образом, определение характеристик давления Pmus(t) дыхательных мышц является ключевым этапом в наблюдении дыхательного усилия.
Известные подходы для оценки давления дыхательных мышц включают инвазивные и неинвазивные методы. Например, документ US 6723055 раскрывает систему для измерения респираторных функций.
Неинвазивный метод, называемый маневр в паузе в конце вдоха, используют для оценки сопротивления и эластичности дыхательной системы путем блокирования дыхательных путей в конце фазы вдоха. Затем может быть вычислен Pmus(t) путем использования уравнения движения легких, а также измеренного давления в дыхательных путях и потока воздуха. Данный подход основан на некоторых предположениях, которые могут быть не достоверными при всех обстоятельствах, а также проблематичными с клинической точки зрения, поскольку он прерывает (хотя и ненадолго) дыхание, необходимое для жизнедеятельности. В другом примере инвазивный метод включает помещение баллонного катетера, вводимого в пищевод пациента. Было продемонстрировано, что давление в пищеводе сильно приближено к внутриплевральному давлению и его используют для вычисления Pmus пациента. Другие подходы основаны на подгонке давления в дыхательных путях и потока воздуха к уравнению движения легких, относящемуся к этим значениям и параметризированному параметрами дыхательной системы, такими как сопротивление дыхательной системы, Rrs, и податливость Crs или эластичность Ers дыхательной системы. Кроме того, эти подходы в целом основаны на некоторых упрощающих предположениях о профиле истинного Pmus(t) пациента для оценки иным образом неопределенного набора уравнений. Эти упрощающие предположения вновь могут быть не достоверными при всех обстоятельствах. В частности, проблемы возникают во время эпизодов асинхронности устройства для искусственной вентиляции легких пациента, при которых дыхательное усилие пациента не в полной мере синхронизировано с положительным давлением в дыхательных путях, прикладываемым устройством для механической искусственной вентиляции легких.
Далее представлены новые и улучшенные аппараты и способы, которые преодолевают вышеуказанные и другие проблемы.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В соответствии с одним аспектом, аппарат для мониторинга дыхания содержит датчик центрального венозного давления, выполненный с возможностью измерения сигнала центрального венозного давления (ЦВД) у пациента. По меньшей мере один процессор запрограммирован на обработку сигнала ЦВД для генерирования информации о дыхании пациента путем операций, включающих:
сегментацию сигнала ЦВД для определения интервалов дыхания;
вычисление сигнала суррогатного значения давления дыхательных мышц из сегментированного сигнала ЦВД и
фильтрацию сигнала суррогатного значения давления дыхательных мышц для удаления компонента работы сердца из сигнала суррогатного значения давления дыхательных мышц.
В соответствии еще с одним аспектом, аппарат для механической искусственной вентиляции легких содержит устройство для механической искусственной вентиляции легких. Датчик центрального венозного давления выполнен с возможностью измерения сигнала центрального венозного давления пациента в зависимости от времени. По меньшей мере один датчик дыхательных путей на устройстве для механической искусственной вентиляции легких выполнен с возможностью измерения давления и потока воздуха в дыхательных путях в зависимости от времени по пациенту. По меньшей мере один процессор запрограммирован на:
прием сигнала центрального венозного давления от датчика центрального венозного давления;
прием сигнала потока в дыхательных путях, зависящего от времени, по пациенту по меньшей мере от одного датчика дыхательных путей;
вычисление сигнала суррогатного значения давления дыхательных мышц, зависящего от времени, по каждому дыхательному движению пациента;
извлечение по меньшей мере одной характеристики дыхания из сигнала суррогатного значения давления дыхательных мышц посредством операций, включающих фильтрацию данных, указывающими на работу сердца пациента, от сигнала давления дыхательных мышц, определение формы сигнала суррогатного значения давления дыхательных мышц и
обновление настроек алгоритма ограниченной оптимизации и/или алгоритма параметрической оптимизации устройства для механической искусственной вентиляции легких на основании сигнала определенной формы.
В соответствии еще с одним аспектом, некратковременный носитель хранит инструкции, выполненные с возможностью считывания и исполнения одним или более микропроцессорами, запрограммированными на осуществление способа наблюдения паттернов дыхания пациента. Способ включает:
прием значения центрального венозного давления от датчика центрального венозного давления; прием значений по меньшей мере одного из давления в дыхательных путях и потока воздуха в дыхательных путях, зависящего от времени, по пациенту по меньшей мере от одного датчика дыхательных путей;
сегментацию принятых значений для определения каждого дыхательного движения пациента;
вычисление сигнала суррогатного значения давления дыхательных мышц, зависящего от времени, по каждому дыхательному движению пациента;
фильтрацию данных, указывающих на работу сердца пациента, от сигнала суррогатного значения давления дыхательных мышц с использованием данных о работе сердца, принятых от датчика ЭКГ, при наличии;
извлечение множества пиков в отфильтрованном сигнале, соответствующих форме отфильтрованном сигнала; и
обновление настроек алгоритма ограниченной оптимизации и/или алгоритма параметрической оптимизации устройства для механической искусственной вентиляции легких исходя из сигнала определенной формы.
Одно преимущество заключается в улучшенном мониторинге нарушений дыхательного усилия пациента во время механической искусственной вентиляции легких пациента, у которого присутствует самостоятельное дыхание.
Еще одно преимущество заключается в определении асинхронности в дыхательном усилии пациента путем фильтрации работы сердца пациента от сигнала дыхания.
Еще одно преимущество заключается в определении такой асинхронности в дыхательном усилии пациента без определения давления дыхательных мышц пациента, Pmus(t).
Еще одно преимущество заключается в автоматической регулировке настроек устройства для искусственной вентиляции легких в ответ на определенную асинхронность.
Еще одно преимущество заключается в улучшении оценки механики дыхания методами ограниченной оптимизации/параметрической оптимизации путем использования подходящих ограничений монотонности и времени истинного давления мышц.
Дополнительные преимущества настоящего изобретения станут поняты специалисту в данной области техники после прочтения и понимания следующего подробного описания. Следует понимать, что в любом представленном варианте реализации может быть достигнуто одно, больше или все вышеуказанные преимущества и/или могут быть достигнуты другие преимущества, или же ни одно из них не может быть достигнуто.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение может принимать форму различных компонентов и схем размещения компонентов, а также различных этапов и порядков выполнения этапов. Чертежи предназначены лишь для иллюстрации предпочтительных вариантов реализации и их не следует рассматривать в качестве ограничения настоящего изобретения.
На фиг. 1 изображены несколько графических профилей внутриплеврального давления, Ppl(t), относительно профилей фактического давления мышц, Pmus(t), для различных типов дыхательного движения.
На фиг. 2 изображены несколько профилей давления в правом предсердии, Pra(t), (Pra эквивалентно сигналу ЦВД) в отношении внутриплеврального давления для дыхательных движений, изображенных на фиг. 1.
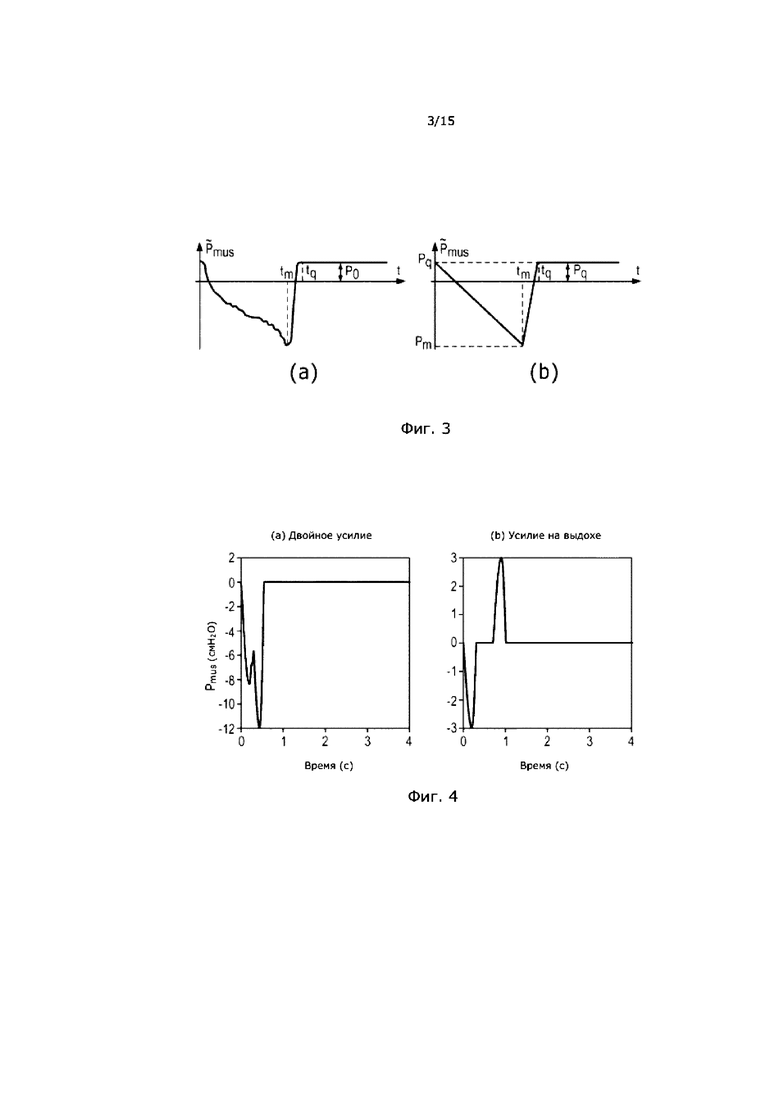
На фиг. 3 изображены потенциальные номинальные (синхронные) профили Pmus, подвергаемые ограничениям монотонности и кусочно-линейным ограничениям.
На фиг. 4 изображен профиль выборки Pmus для двойного усилия на вдохе и усилия на выдохе.
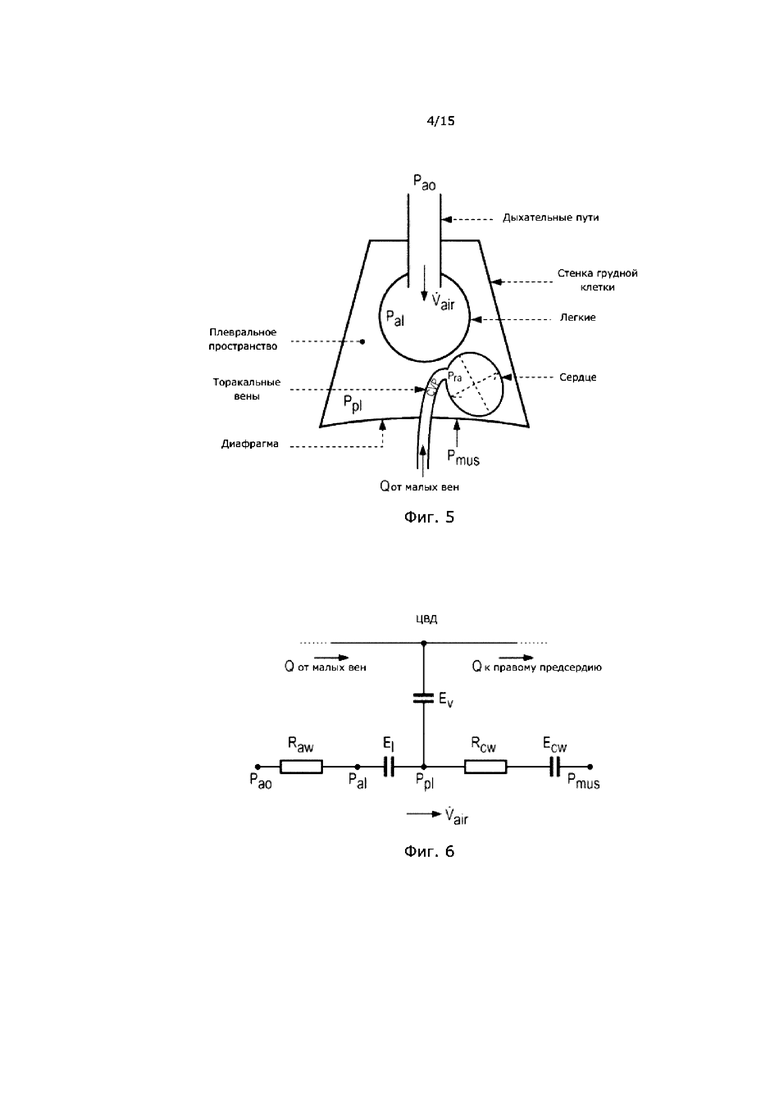
На фиг. 5 представлено схематическое изображение механики дыхания и сердце.
На фиг. 6 изображена электрическая модель дыхательного аппарата и центральных вен.
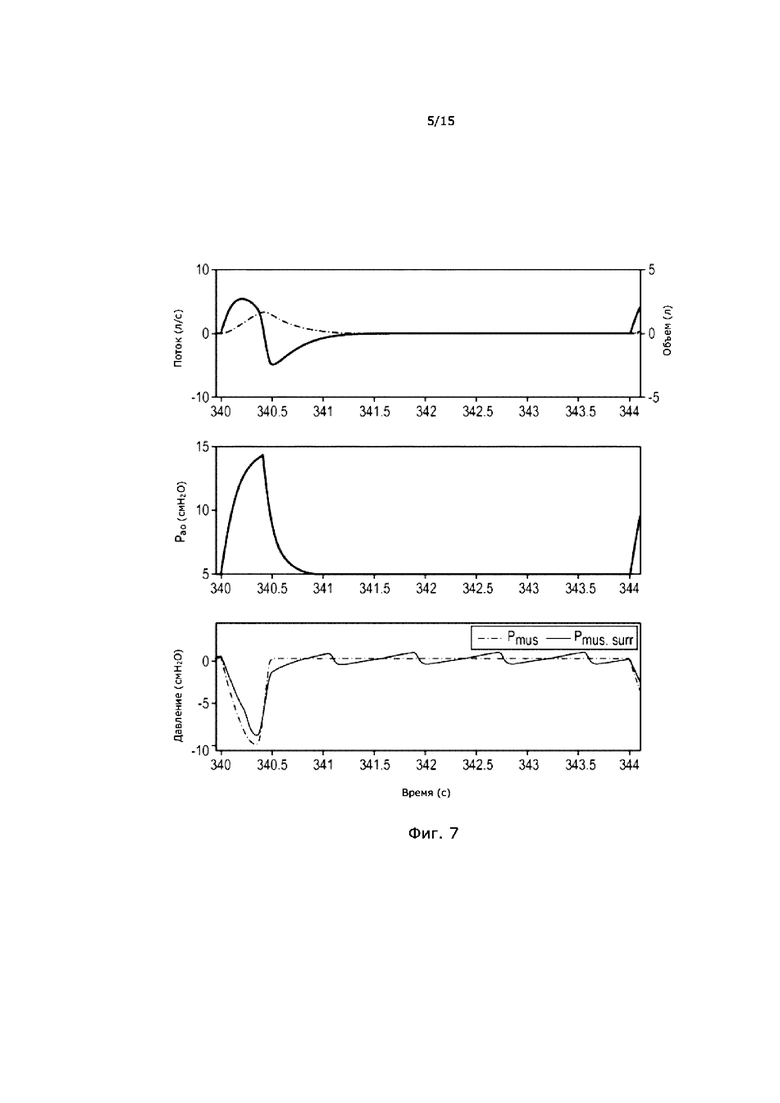
На фиг. 7 изображены реальные и сигналы суррогатного значения мышечного усилия во время регулярного усилия на вдохе.
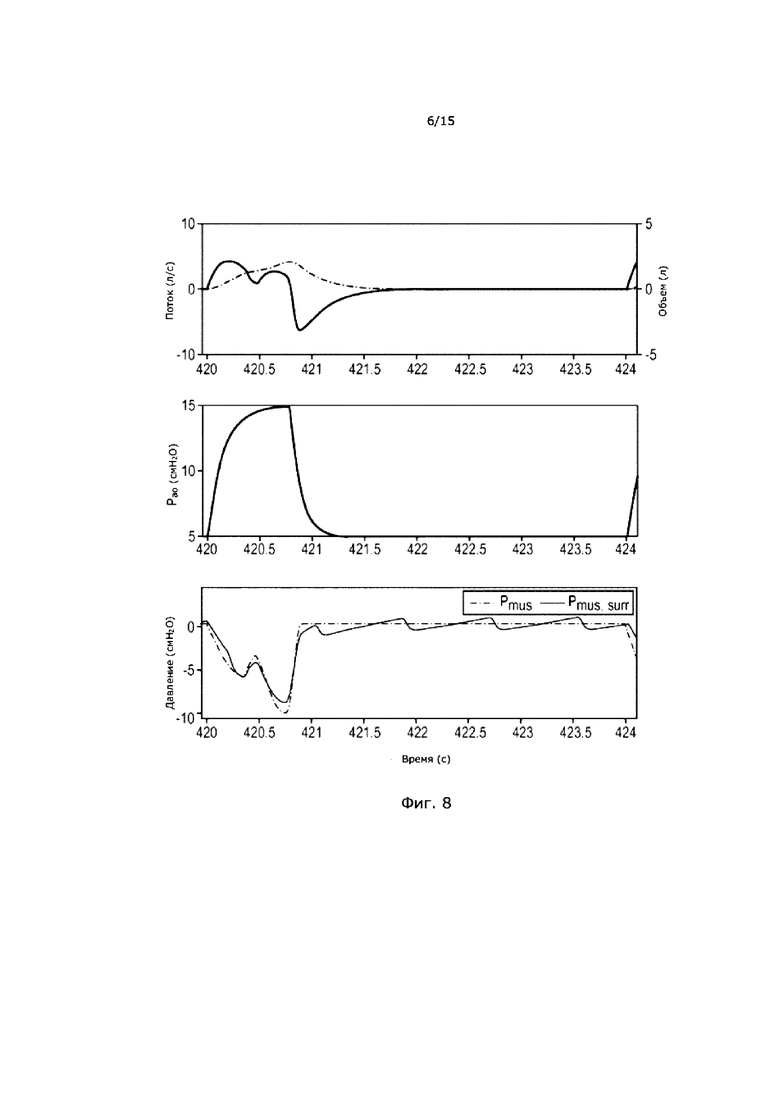
На фиг. 8 изображены реальные и сигналы суррогатного значения мышечного усилия во время двойного усилия на вдохе.
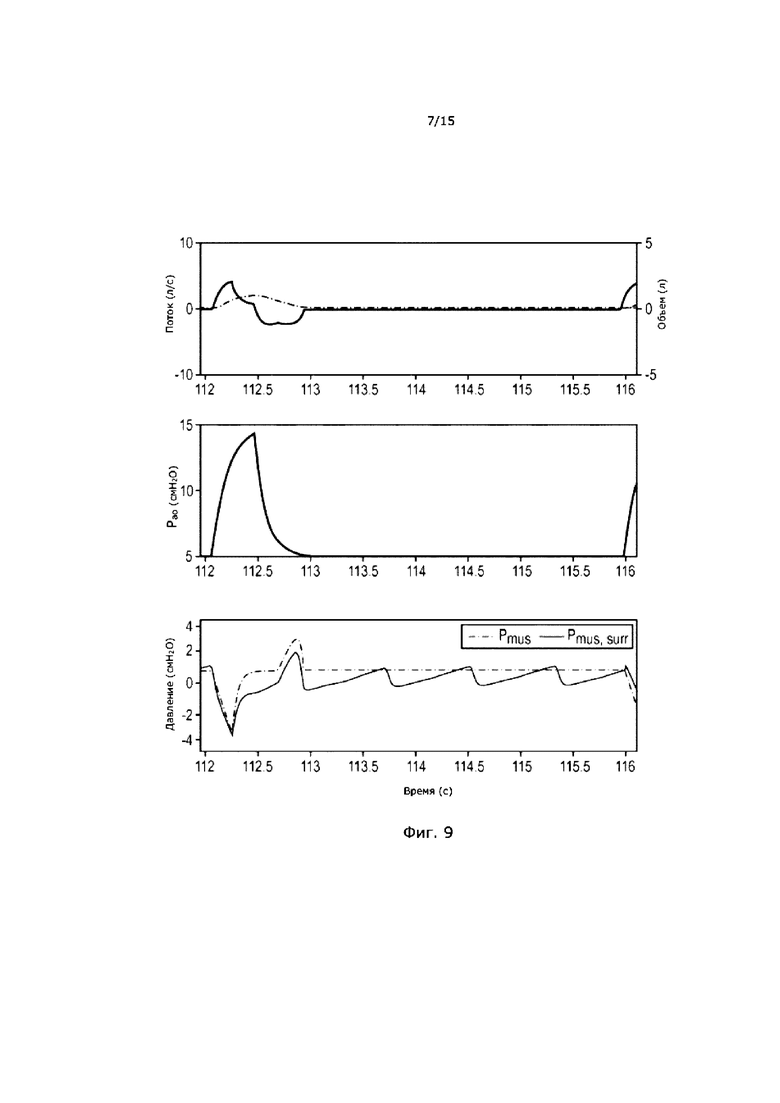
На фиг. 9 изображены реальные и сигналы суррогатного значения мышечного усилия во время усилия на выдохе.
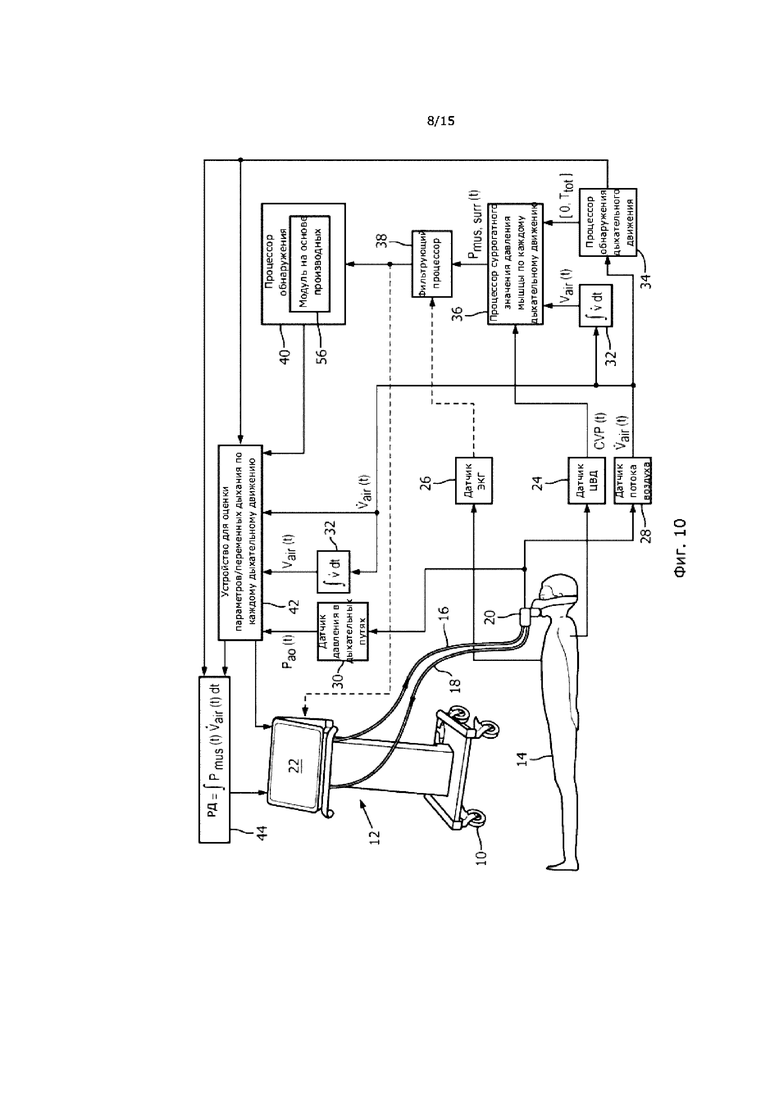
На фиг. 10 приведено схематическое изображение предложенного аппарата для искусственной вентиляции легких, в соответствии с одним аспектом настоящего изобретения.
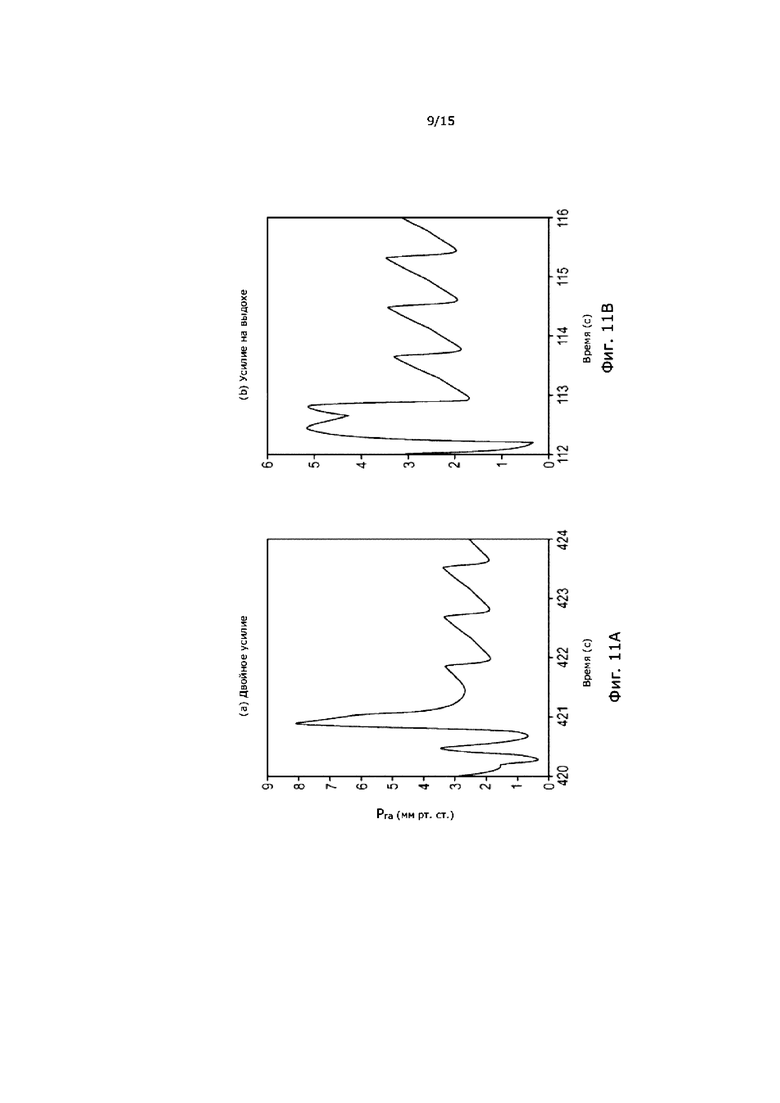
На фиг. 11А изображен график давления в правом предсердии, соответствующего дыханию с двойным усилием на вдохе.
На фиг. 11B изображен график давления в правом предсердии, соответствующего дыханию с усилием на выдохе.
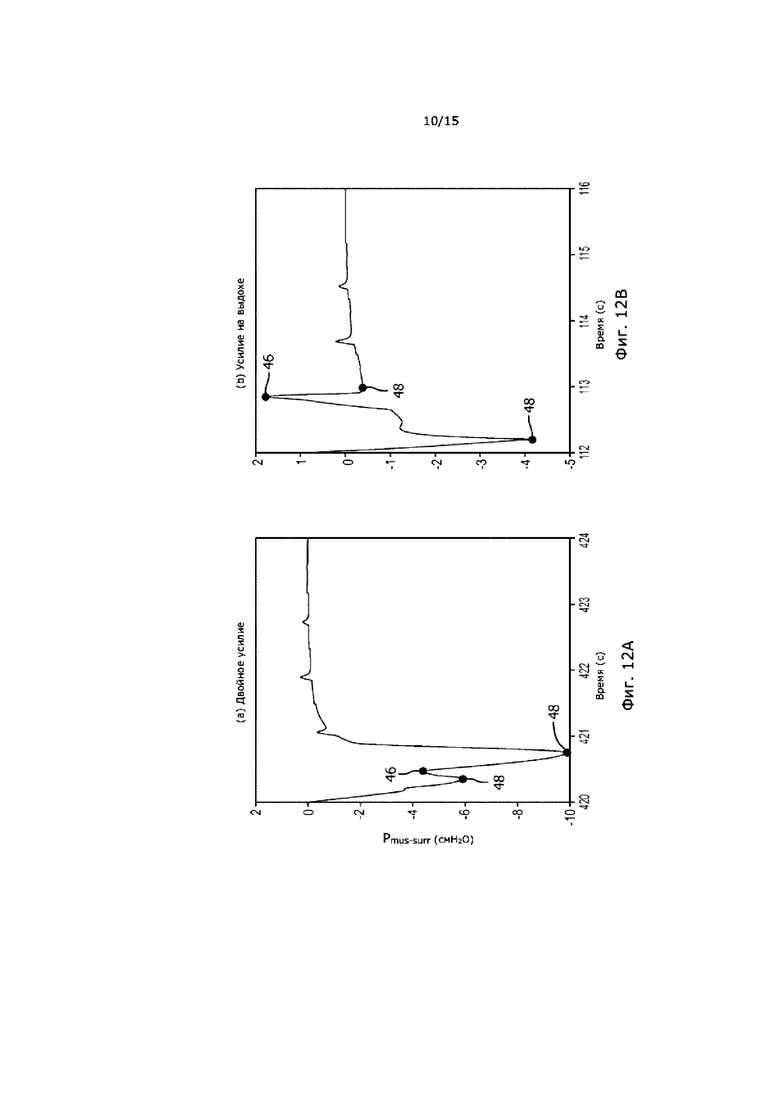
На фиг. 12А изображен график отфильтрованных профилей суррогатного значения давления мышц вместе с определением пиков для дыхания с двойным усилием на вдохе.
На фиг. 12В изображен график отфильтрованных профилей суррогатного значения давления мышц вместе с определением пиков для дыхания с усилием на выдохе.
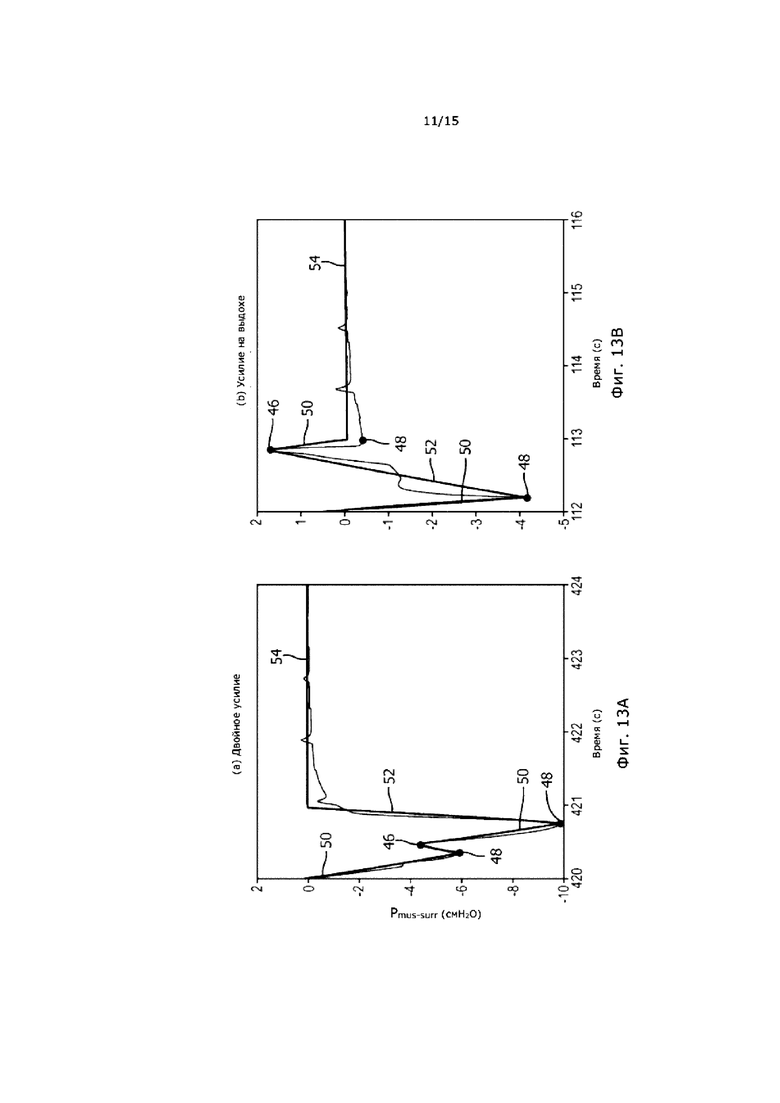
На фиг. 13А изображены сегменты сигнала суррогатного значения давления мышц с положительной монотонностью, отрицательной монотонностью и постоянным значением для отфильтрованного сигнала, изображенного на фиг. 12А.
На фиг. 13В изображены сегменты сигнала суррогатного значения давления мышц с положительной монотонностью, отрицательной монотонностью и постоянным значением для отфильтрованного сигнала, изображенного на фиг. 12В.
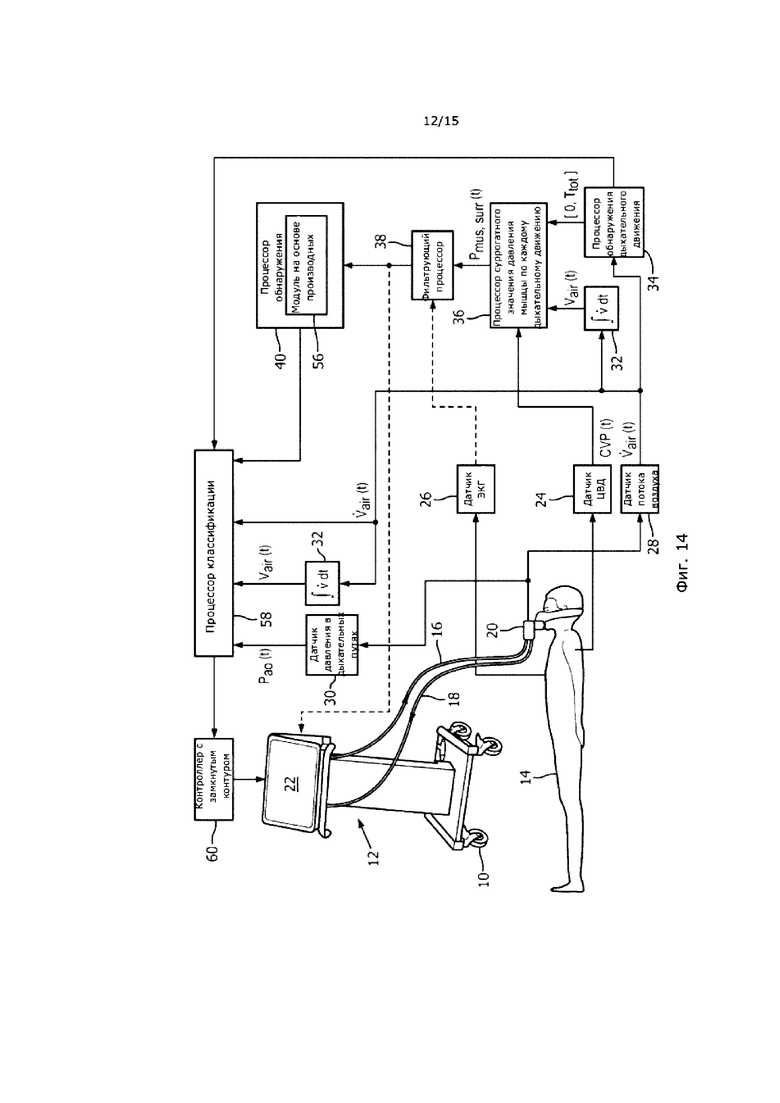
На фиг. 14 приведено схематическое изображение предложенного аппарата для искусственной вентиляции легких, в соответствии с еще одним аспектом настоящего изобретения.
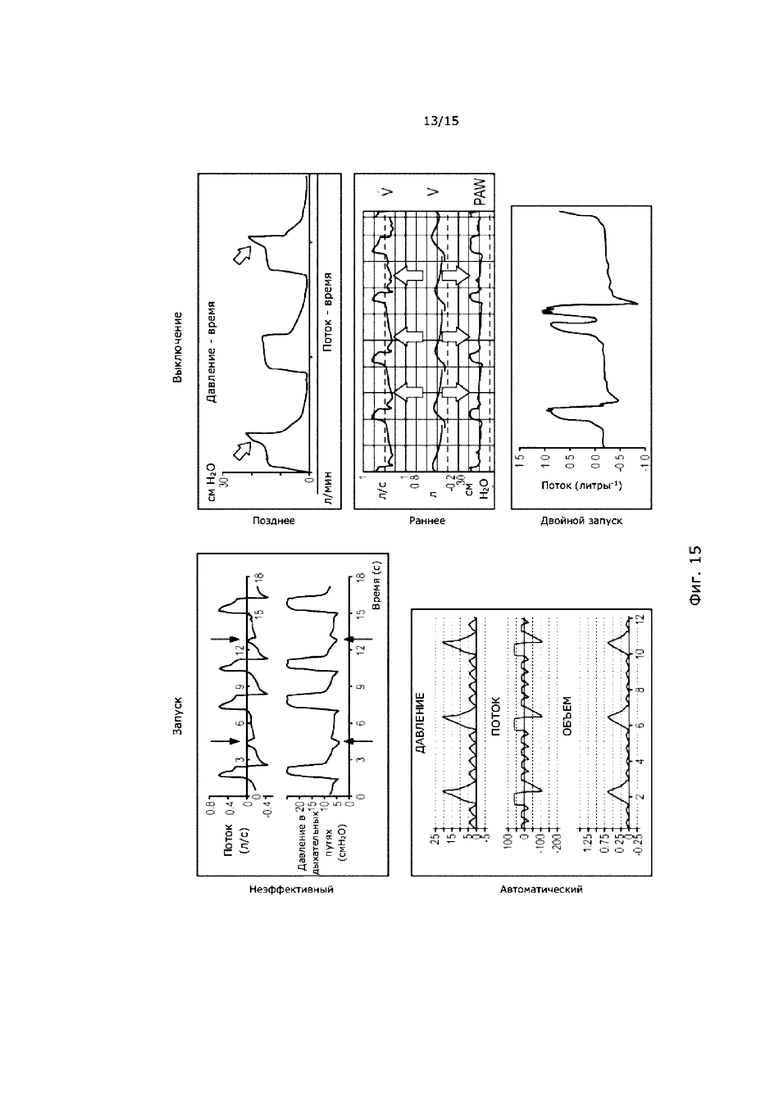
На фиг. 15 изображен пример графиков асинхронностей устройства для искусственной вентиляции легких пациента другого типа.
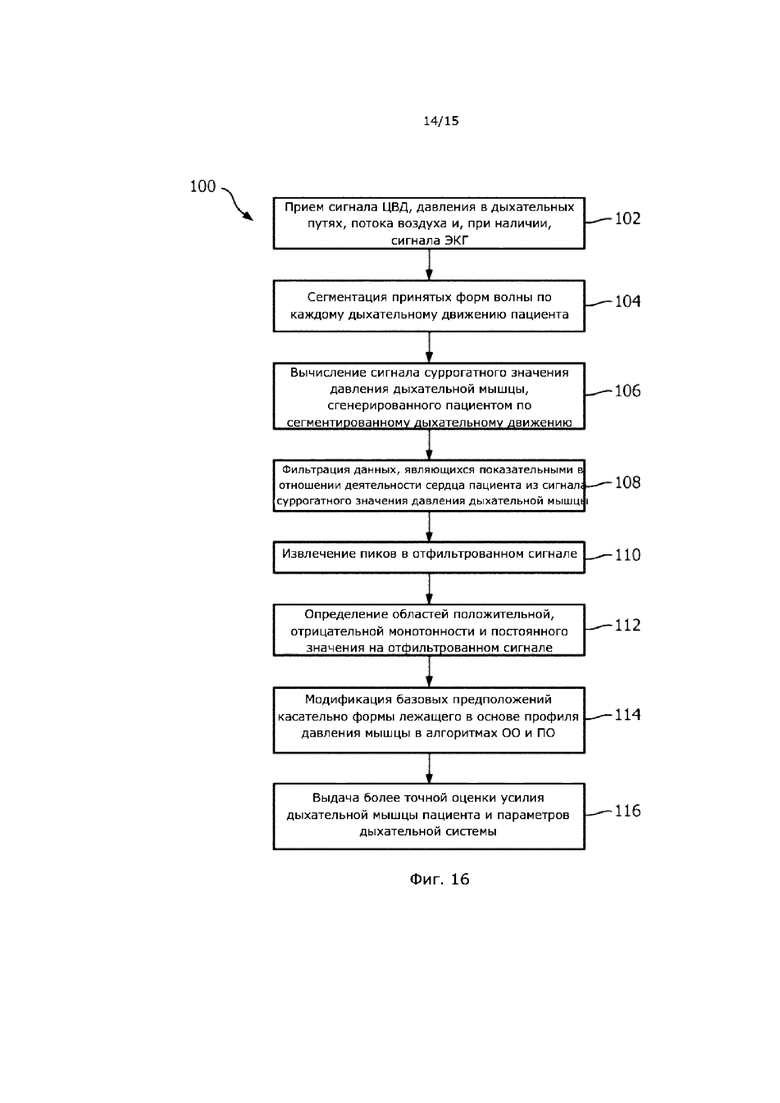
На фиг. 16 изображена структурная схема примера способа использования аппарата для искусственной вентиляции легких, изображенного на фиг. 10.
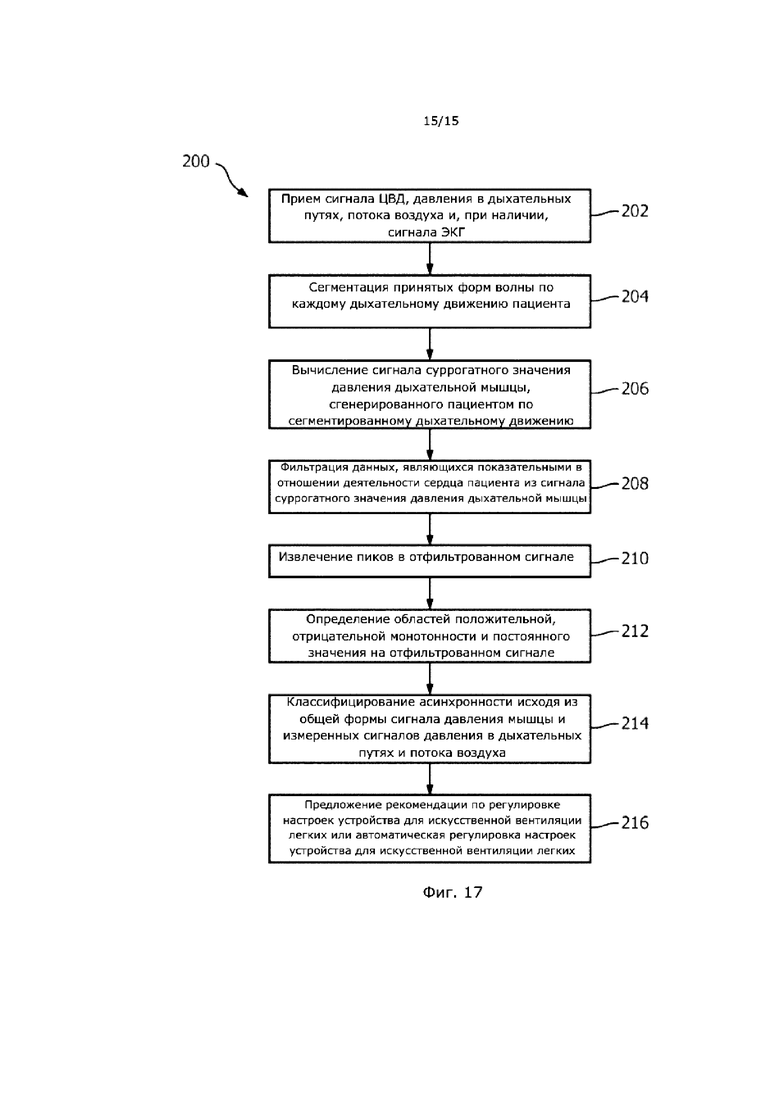
На фиг. 17 изображена структурная схема примера способа использования аппарата для искусственной вентиляции легких, изображенного на фиг. 14.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее представлены улучшенные подходы для мониторинга дыхательной системы, в которых эффективно применяют измеренное центральное венозное давление (ЦВД) для обеспечения улучшенной оценки дыхательной деятельности. В частности, в описанных подходах выявлено то, что ЦВД отражает отклонения, вызванные работой дыхательных мышц, во внутриплевральном давлении, Ppl(t), которое представляет собой давление в полости грудной клетки. Более конкретно, давление в правом предсердии, Pra(t), надежно коррелирует с внутриплевральным давлением, Ppl(t), а ЦВД является суррогатным значением давления в правом предсердии, Pra(t), поскольку местом измерения сигнала ЦВД являются торакальные вены, находящиеся близко к (сразу перед) правому предсердию. Кардиопульмонарное моделирование, описанное в настоящем документе, демонстрирует эти отношения. По существу, венозная система (например, верхняя и нижняя полые вены) возвращает кровь от тела в правое предсердие, тем самым обеспечивая физиологическое основание для связывания Pra и ЦВД. Кроме того, отношение между внутриплевральным давлением, Ppl(t), и давлением дыхательных мышц, Pmus(t), может быть выражено (до постоянного члена) следующим образом: Pmus(t)=Ppl(t)-EcwVair(t), где Ecw представляет собой эластичность стенки грудной клетки, а Vair(t) представляет собой объем наполнения легких воздухом (вычисляемый в виде интеграла потока воздуха в дыхательных путях). В вариантах реализации, описанных в настоящем документе, как правило, используют это приблизительное отношение, хотя подразумевается дополнительное принятие во внимание второстепенных факторов, таких как сопротивление стенки грудной клетки и/или зависимость Ecw от объема Vair(t) наполнения легких воздухом. Замещение ЦВД в качестве близкого приближения внутриплеврального давления приводит к отношению суррогатного значения давления мышц Pmus, surr(t)=CVP(t)-EcwVair(t). Преимущественно, ЦВД уже наблюдают в большинстве учреждений интенсивной терапии в качестве компонента наблюдения за сердцем и/или сердечно-сосудистой системы у пациентов с заболеваниями сердца или артерий. В отличие от этого, внутриплевральное давление Ppl(t) и давление в правом предсердии Pra(t), как правило, не подвергают мониторингу в учреждениях интенсивной терапии, а инструменты для такого мониторинга не являются общедоступными.
В некоторых вариантах реализации вышеуказанный подход может быть использован для выявления суррогатного значения давления дыхательных мышц, Pmus,surr(t), из измеренного CVP(t) и потока воздуха в дыхательных путях. Следует понимать, что сигнал суррогатного значения давления дыхательных мышц, который вычисляют с использованием ЦВД, может отличаться от истинного Pmus во всех клинических условиях вследствие различных факторов, таких как работа сердца, которые влияют непосредственно на волновой сигнал ЦВД. В некоторых вариантах реализации, зная приблизительно характер, лежащих в основе отношений, из данной оценки оценивают лишь волновой сигнал Pmus(t), однако в настоящем документе считается, что информация о данном волновом сигнале представляет собой особую значимость в улучшении оценки дыхательной системы при наличии усложняющих факторов, таких как асинхронность устройства для искусственной вентиляции легких пациента. Таким образом, в вариантах реализации, описанных в настоящем документе, ЦВД используют для выявления сигнала суррогатного значения давления мышц (Pmus,surr(t)). Затем данный сигнал Pmus,surr(t) используют ДЛЯ выявления информации о форме и времени истинного сигнала Pmus(t). После этого данную информацию используют для модификации уже разработанных методов оценки, например, СО и РО (в них используют лишь результаты измерений давления и потока воздуха в дыхательных путях), так что лежащий в основе истинный Pmus(t) более точно оценивают в случае нарушенной дыхательной деятельности пациента относительно поддержки искусственной вентиляции легких (асинхронность).
В целом, в подходах, описанных в настоящем документе, используют измеренное CVP(t) для вычисления суррогатного значения Pmus (Pmus,surr). С этой целью, сигнал (ЦВД или Pmus,surr) фильтруют для удаления сердечных импульсов, обусловленных сокращениями сердца. Компонент работы сердца может быть определен с использованием внешнего сигнала электрокардиограммы (ЭКГ) или путем анализа измеренного сигнала CVP(t) исходя из того, что частота сердечных сокращений представляет собой периодический сигнал с типичной частотой, составляющей приблизительно от 60 до 150 ударов в минуту, тогда как частота дыхания составляет порядка от 4 до 20 дыхательных движений в минуту. В некоторых вариантах реализации поток воздуха в дыхательных путях и/или сигнал CVP(t) анализируют для сегментации интервалов дыхания, дополнительно способствуя обработке сигнала ЦВД и/или Pmus,surr.
Физиологические переменные пациента, такие как значения давления, потоков, частота сердечных сокращений и частота дыхания, могут обеспечить существенные преимущества в диагностике и наблюдении заболеваний. Например, артериальное давление (АД) пациента практически повсеместно подвергают мониторингу в больницах, и оно является показательным в отношении постнагрузки сердца и сокращения, возникающего в стенке желудочка. Другим традиционным измеряемым сигналом у пациента является центральное венозное давление. Медицинское сообщество использует ЦВД, как правило, в качестве индекса предварительной нагрузки сердца, который отражает способность сердца создавать давление, достаточное для индуцирования кровотока. ЦВД представляет собой показатель взаимоотношения между функцией сердца и кровообращением, что отображают в виде общеизвестных кривых Франка-Старлинга. Таким образом, считают, что наблюдение за ЦВД, в дополнение к обычно измеряемому АД, предоставляет врачам ценные сведения о динамике работы сердечно-сосудистой системы, особенно в отделении интенсивной терапии (ОИТ).
Как определено в настоящем документе, в дополнение к вышеуказанной информации, относящейся к сердечно-сосудистой системе, которую врачи могут получить при доступности мониторинга ЦВД около койки, сам волновой сигнал ЦВД также демонстрирует отклонения, которые связаны с дыхательной активностью пациента. В частности, торакальные вены, место, в котором обычно измеряют ЦВД, находятся внутри полости грудной клетки и, следовательно, они подвержены воздействию внутриплеврального давления Ppl, которое представляет собой давление между легкими и стенкой грудной клетки. Как продемонстрировано в настоящем документе путем сердечно-легочных имитаций, внутриплевральное давление проявляет заметные колебания вследствие самостоятельного дыхания (без поддержки извне) или поддержки искусственной вентиляции легких извне. В первом случае, дыхательное усилие пациента, выражаемое давлением мышц (Pmus), эквивалентное давление усилия, прилагаемого дыхательными мышцами, тянет диафрагму вниз и расширяет стенку грудной клетки, приводя к снижению Ppl. Во время расслабления мышц эластичность стенки грудной клетки, характеризуемая, например, параметром эластичности Ecw, обуславливает возврат внутриплеврального давления к своему значению покоя. В случае механической искусственной вентиляции легких пациента, например, в режиме управляемой искусственной вентиляции легких с регулируемым давлением (ИВЛРД), пациент, которому проводят механическую искусственную вентиляцию легких, демонстрирует Ppl с положительными колебаниями, которые следуют профилю доставляемого объема. Более того, в режимах механической искусственной вентиляции легких с частичной помощью, как при искусственной вентиляции легких с поддержкой давлением (ИВЛПД), при которой пациент и устройство для искусственной вентиляции легких имеют общую работу, выполняемую дыхательным аппаратом, Ppl содержит как отрицательные, так и положительные колебания, зависящие от баланса между этими двумя источниками.
В результатах имитации, приведенных в настоящем документе, использовали моделирование сердечно-легочной (СЛ) системы для демонстрации различных отношений и корреляций, лежащих в основе описанных методов мониторинга дыхания с использованием результатов измерения ЦВД. СЛ-модель, использованная для этих имитаций, описана в работе автора Альбанезе и др. под названием «Интегрированная математическая модель сердечно-легочной системы человека: разработка модели», Американский журнал по физиологии - Физиология сердца и кровообращения, p. ajpheart.00230.2014, декабрь 2015 г. (Albanese et al., "An Integrated Mathematical Model of the Human Cardiopulmonary System: Model Development", Am. J. Physiol. - Hear. Circ. Physiol., p.ajpheart.00230.2014, Dec. 2015 (доступна в режиме онлайн по ссылке http://www.ncbi.nlm.nih.gov/pubmed/26683899 или http://ajpheart.physiology.org/content/early/2015/12/14/ajpheart.00230.2014). Она представляет собой интегрированную сердечно-легочную модель, которая математически описывает взаимосвязи между сердечно-сосудистой и дыхательной (т.е. легочной) системами вместе с их основными кратковременными механизмами управления, и охватывает сердечнососудистую циркуляцию, механику дыхания, газообмен тканей и альвеол, а также кратковременные механизмы нервной регуляции, действующие на сердечно-сосудистую и дыхательную функции. Модель СЛ-системы может быть использована для имитации как нормального поведения СЛ, так и поведения СЛ под воздействием различных патологических состояний.
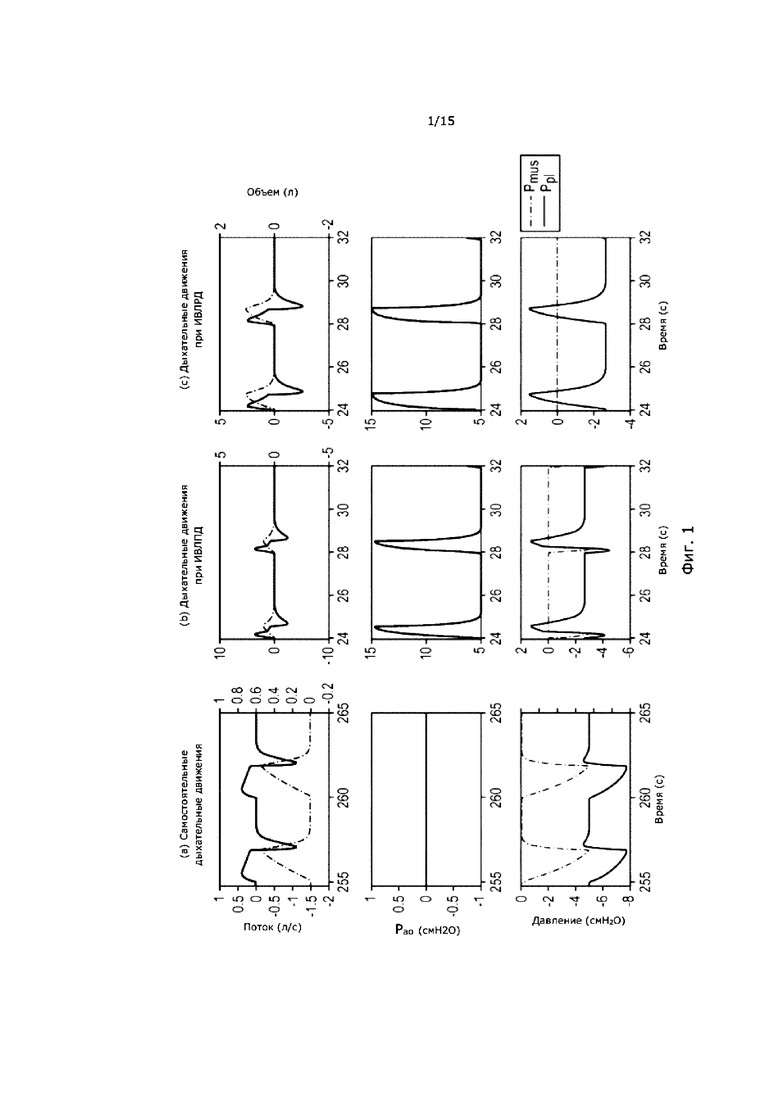
Образцы имитированного давления и волнового сигнала потока воздуха для двух последовательных дыхательных движений изображены на фиг. 1. Усилие, прилагаемое активным (т.е. не находящимся под воздействием седативных средств) пациентом во время самостоятельного дыхания или в режиме ИВЛПД, имитировали посредством профилей Pmus, которые подобны эквивалентному давлению мышц, полученному из экспериментальных данных по пациенту. На фиг. 1 изображено, что внутриплевральное давление проявляет отрицательные колебания, когда пациент активен, и положительные отклонения, когда аппарат для искусственной вентиляции легких поддерживает доставку воздуха в дыхательный аппарат. Рао представляет собой давление на входе в дыхательные пути пациента или на Y-соединении устройства для искусственной вентиляции легких, причем поток и объем являются показательными в отношении потока воздуха, доставляемого в легкие вследствие поддержки устройством для искусственной вентиляции легких извне или вследствие деятельности пациента. Следует понимать, что объем представляет собой прямой интеграл потока и он сбрасывается на ноль в устройстве для искусственной вентиляции легких перед началом каждого дыхательного движения.
Как изображено на фиг. 1, в устойчивом состоянии Ppl имеет отрицательное значение. В конце каждого дыхательного движения транспульмонарное давление (определяемое, как альвеолярное давление (т.е. внутри) минус давление Ppl (т.е. снаружи)) должно быть положительным для наполнения воздухом легких (т.е. альвеолы не повреждены). Например, при нормальном самостоятельном дыхании, транспульмонарное давление составляет около 5 см H2O и поскольку давление в дыхательных путях равно нулю, плевральное давление Ppl равно -5 см H2O. Таким образом, это плевральное давление Ppl в конце выдоха связано с функциональной остаточной емкостью (ФОЕ) легких и на него оказывает воздействие внешнее (в дыхательных путях) давление в конце выдоха (ПДКВ). Например, если значение ПДКВ для дыхательных движений при ИВЛПД и ИВЛРД отлично от нуля, плевральное давление в конце выдоха составляет больше -5 см H2O.
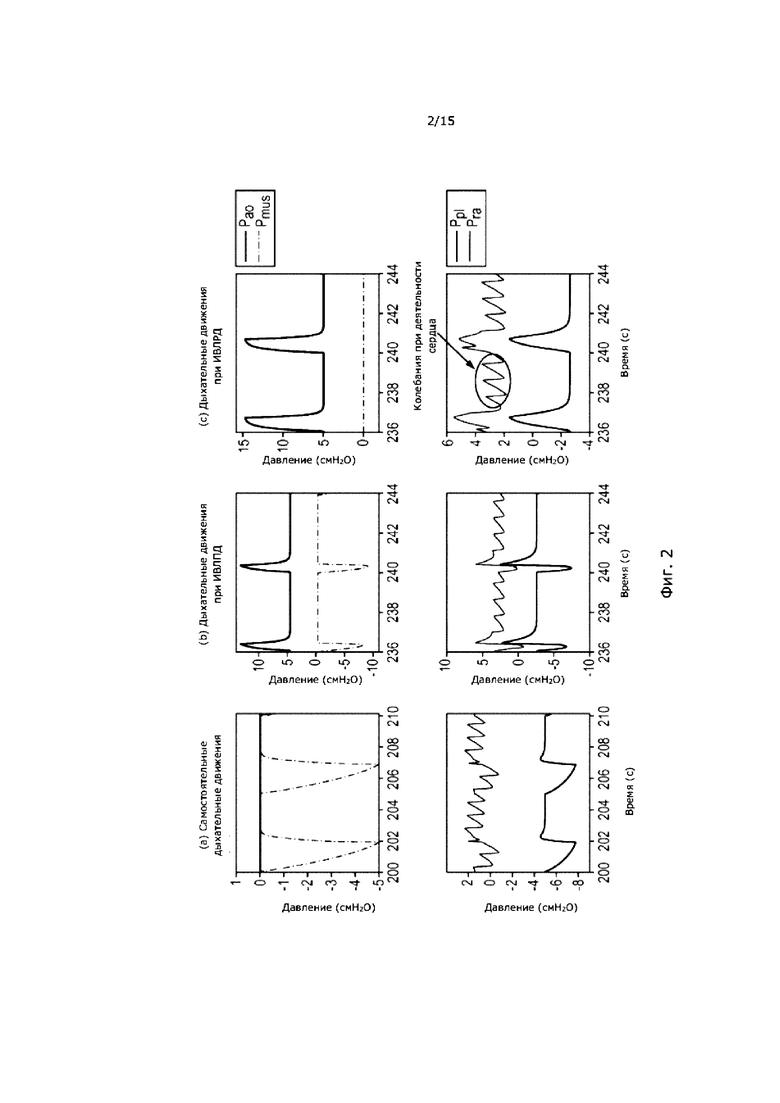
На фиг. 2 показано, что качественная демонстрация отношения между волновыми сигналами центрального венозного и внутриплеврального давления получена путем нанесения на график этих двух сигналов вместе с Pmus. Все сигналы имитируют для различных типов дыхательных движений, изображенных на фиг. 1 (т.е. (а) самостоятельных дыхательных движений, режимов (b) ИВЛПД и (с) ИВЛРД). В исследованиях с имитацией, изображенных на фиг. 2, показан волновой сигнал давления в правом предсердии (Pra) вместо ЦВД. Боковая венозная катетеризация (катетер иногда называют центральным катетером), которая выдает волновой сигнал ЦВД в клинических условиях, направлена на регистрацию деятельности правого предсердия и, таким образом, ожидается, что измеренное ЦВД будет приблизительно соответствовать Pra. Следует понимать, что центральный датчик ЦВД не является единственным способом получения информации о сигнале ЦВД. Для получения значений давления ЦВД подходят любые средства такого измерения. Некоторые датчики ЦВД представляют собой датчики низкого давления и, следовательно, их выходные данные подвержены искажениям вследствие выраженной двигательной активности пациента.
В дополнение к отклонениям, вызванным дыхательной деятельностью, давление в правом предсердии и, следовательно, измеренный волновой сигнал ЦВД, содержит циклические колебания, относящиеся к функции сердечно-сосудистой системы (т.е. компонента сигнала работы сердца, как обозначено черной окружностью на фиг. 2).
Сигнал ЦВД содержит отклонения, обусловленные динамикой, возникающей внутри или снаружи конкретного сосуда или структуры, которая служит в качестве точки измерения. Сердечные колебания являются колебаниями первого типа и являются результатом работы сердца и кровеносной системы. Они могут относиться к распространению кровотока по сосудистой системе, обратно к правым отделам сердца, или с отклонениями волны, исходящими от сокращающихся камер сердца (т.е. правого предсердия и желудочка). В последнем типе паттерны дыхания (самостоятельного или механически поддерживаемого) влияют на внутривенное давление путем вызывания отклонений, амплитуда и направление которых зависят от внешнего внутриплеврального давления и плотности сосуда.
Алгоритмы, такие как алгоритм ограниченной оптимизации (OO) и/или алгоритм параметрической оптимизации (ПО), которыми оценивают механику дыхательного аппарата (например, сопротивление, эластичность и т.п.) и усилие, прикладываемое дыхательными мышцами пациента (которое, как правило, количественно выражают, как Pmus), путем решения уравнения движения легких, основаны на ограничениях монотонности лежащего в основе волнового сигнала давления Pmus дыхательных мышц или на некоторых предположениях касательно формы профиля давления Pmus дыхательных мышц для преодоления природы проблемы, которая, как правило, не определена. Например, можно предположить, что при процедуре OO профиль Pmus в дыхательном движении состоит из области отрицательной монотонности, которая проходит до точки с минимальным значением, и области положительной монотонности, за которой, в свою очередь, идет другая область постоянного давления. Например, образец профиля Pmus, который следует этим ограничениям монотонности, изображен на левом графике на фиг. 3. Еще в одном примере, таком как подход ПО, предполагается, что Pmus имеет морфологические характеристики, подобные ОО, но кусочные области следуют некоторым заранее сконфигурированным профилям, таким как линейный (изображенный на правом графике на фиг. 3), параболический или постоянный. ПО проводит поиск по диапазону возможных волновых сигналов Pmus, которые отличаются в части формы, времени и амплитуды, и выбирает одну, которая дает оптимальные результаты оценки, если имеет место погрешность подбора давления в дыхательных путях.
Приведенные выше предположения касательно морфологических характеристик Pmus удовлетворены для приемлемо широкого диапазона нормальных профилей усилия на вдохе; однако имеет место существенное количество случаев, особенно при патологических состояниях и/или при плохо сконфигурированных настройках устройства для искусственной вентиляции легких, при которых давление мышц не соответствует этим ограничениям. Такие случаи могут включать, но без ограничения, двойные усилия на вдохе или форсированные усилия на выдохе, подобные тем, что изображены на фиг. 4. Ожидается, что в этих условиях производительность алгоритма OO и ПО будет значительно ухудшаться. Однако если общая форма профиля давления мышц заведомо известна, оба алгоритма могут быть модифицированы соответствующим образом и, следовательно, специально разработаны для каждого конкретного паттерна дыхания. Например, если определено двойное усилие на вдохе, соответствующие ограничения монотонности, или кусочные ограничения, могут заменить ограничения по умолчанию так, чтобы улучшить результаты оценки не только в части Pmus, но также в части оценок сопротивления и эластичности дыхательного аппарата. С этой целью, информация о форме Pmus, благодаря использованию результатов измерения ЦВД, как описано в настоящем документе, может обеспечивать более широкую применимость методов оценки OO и ПО в клинических условиях.
Еще в одной задаче по мониторингу дыхания было доказано, что точная оценка начала и прекращения дыхательной деятельности пациента является основной проблемой. Надлежащий и синхронный запуск и прекращение каждого механически поддерживаемого дыхательного движения, в соответствии с потребностями пациента, может привести к преимуществам, таким как существенное уменьшение дыхательной работы, сокращенная длительность госпитализации вследствие более высокой вероятности снятия устройства с груди и, следовательно, более низкие затраты на здравоохранение. Для этой цели желательно точное определение асинхронности устройства для искусственной вентиляции легких пациента. Как правило, результаты измерения давления и потока воздуха в дыхательных путях используют для определения типа и степени выраженности асинхронности, и последующей выдачи практикующему врачу соответствующих корректирующих действий или автоматической и оптимальной регулировки настроек устройства для искусственной вентиляции легких. В вариантах реализации, описанных в настоящем документе, для оценки асинхронности также используют волновой сигнал ЦВД, поскольку ЦВД выдает сигнал, отличающийся от традиционных измерений дыхания (например, давления и потока в дыхательных путях), который отражает внутриплевральные колебания и, следовательно, дыхательное усилие.
Как продемонстрировано СЛ-имитацией, такой как описана со ссылкой на фиг. 1 и 2, имеет место корреляционная взаимосвязь между внутриплевральным давлением (Ppl) и центральным венозным давлением (ЦВД). В частности, различные патерны дыхания, представленные волновым сигналом давления мышц, при режимах искусственной вентиляции легких или состояниях паицента в результате дают различные волновые сигналы внутриплеврального давления и, таким образом, профили связанного центрального венозного давления. Исходя из данного наблюдения, далее представлен преимущественный способ, в котором используют сигнал ЦВД, выполнения задач по мониторингу дыхания, таких как: (1) надлежащая модификация ограничений монотонности в алгоритме OO или выбор категории заданных профилей Pmus в алгоритме ПО; и (2) улучшение алгоритмов определения асинхронности и классификации.
Схематическое изображение сердца и легких в полости грудной клетки показано на фиг. 5. На этой упрощенной фигуре дыхательный аппарат (т.е. легкие) изображен в виде одного эластичного альвеолярного отсека (т.е. шара) с внутриальвеолярным давлением, Pal, и способного к сопротивлению пути (т.е. дыхательных путей, например, трахеи). Как альвеолы, так и сердце, находятся в пределах стенки грудной клетки (т.е. полости грудной клетки) и, следовательно, подвержены воздействию со стороны внутриплеврального давления, Ppl, которое, в свою очередь, зависит как от внешнего давления в дыхательных путях, Рао, так и от давления мышц, Pmus. В сердце фокус сделан на правое предсердие с давлением Pra, которое наполняется кровью из вен через торакальные вены, в основном, верхнюю и нижнюю полые вены. Поскольку правое предсердие находится внутри полости грудной клетки, изменения внутриплеврального давления Ppl влияют на давление Pra в правом предсердии и наоборот. Поскольку эти переносы давления зависят от свойств эластичности сосудистой ткани и формы сосуда, значение эластичности сосуда указывает на то, насколько подавленными будут эти изменения.
Аналог в виде электрической схемы, соответствующий приведенному выше схематическому изображению, изображен на фиг. 6. Элементы сопротивления и эластичности дыхательных путей/легких обозначены как Raw и EL соответственно, тогда как эластичности грудной клетки обозначена как Ecw. Дополнительное сопротивление, Rcw, которое является причиной рассеяния энергии внутри стенки грудной клетки, зачастую игнорируется вследствие относительно низкого трения тканей. Например, СЛ-модель, используемая для результатов имитации, пренебрегает Rcw и, следовательно, внутриплевральное давление вычисляют как Ppl=Pmus+EcwVair, где Vair представляет собой объем воздуха, доставляемого в легкие, и его вычисляют как интеграл потока по времени,  (номинальное значение Ecw составляет 10 cmH2O/L). CVP представляет собой давление внутри торакальных (центральных) вен, a Ev представляет собой параметр, который отражает свойства эластичности вен, обусловленные их свойствами материала и геометрией (т.е. формой).
(номинальное значение Ecw составляет 10 cmH2O/L). CVP представляет собой давление внутри торакальных (центральных) вен, a Ev представляет собой параметр, который отражает свойства эластичности вен, обусловленные их свойствами материала и геометрией (т.е. формой).
В соответствии с принципом сохранения массы, изменение объема центрального венозного отсека, обусловленное эластичным элементом, Ev, равно разности между потоком крови, входящим и выходящим из соответствующего местоположения в пространстве. Таким образом, может быть получено следующее обыкновенное дифференциальное уравнение (ОДУ) первого порядка:

Одним из свойств вен является их способность действовать в роли емкостного резервуара и хранить существенное количество объема крови. Данное явление связано с их высоким значением эластичности, которое зависит от состояния венозного тонуса и изменяется посредством симпатической стимуляции. После этого целесообразно предположить, что венозная эластичность является высокой или  (типичным значением для Ev является 0,012 cmH2O/L). Используя данную аппроксимацию, может быть получен сигнал суррогатного значения для внутриплеврального давления.
(типичным значением для Ev является 0,012 cmH2O/L). Используя данную аппроксимацию, может быть получен сигнал суррогатного значения для внутриплеврального давления.

Поскольку Ppl связано с мышечным усилием через механические свойства стенки грудной клетки (пренебрегая Rcw), то обеспечена возможность выражения сигнала суррогатного значения Pmus(t) путем использования CVP(t), согласно уравнению 2,

где Р0=Ppl(0)-CVP(0) является постоянным членом. Уравнение 3
Таким образом, уравнение 3 обеспечивает вычисление суррогатного значения давления дыхательных мышц Pmus,surr(t) или по меньшей мере его волнового сигнала при условии измеренных CVP(t) и Vair(t), при этом последнее получено в качестве интеграла потока воздуха в дыхательных путях по времени.
Для визуального сравнения фактического давления мышц, Pmus(t), и сигнала суррогатного значения Pmus,surr(t), вычисленного с помощью уравнения 3, т.е. Pmus,surr(t)=CVP(t)-EcwVair(t)+Р0, внимание удаляется дыхательным движениям при ИВЛПД, поскольку искусственная вентиляция легких с поддержкой давлением является общим режимом, который обеспечивает пациенту возможность активно дышать и разделять дыхательную нагрузку с устройством. Таким образом, ожидается, что во время искусственной вентиляции легких с поддержкой давлением (ИВЛПД) паттерны дыхания могут существенно отличаться между дыхательными движениями на основании клинического состояния пациента и выбранных настроек устройства для искусственной вентиляции легких. Подобно результатам имитации, представленным ранее, упрощенная версия сердечно-легочной модели может быть использована для генерирования Pmus(t) и Pmus,surr(t) и имитации соответствующего давления, потока воздуха и волновых сигналов объема в дыхательных путях для трех различных паттернов дыхания: (i) регулярное усилие на вдохе (фиг. 7), (ii) двойное усилие на вдохе (фиг. 8) и (iii) усилие на выдохе (фиг. 9). Следует понимать, что СЛ-модель генерирует лишь истинное Pmus и затем имитирует/вычисляет сигналы ЦВД, давления в дыхательных путях и потока воздуха. Из него вычисляют суррогатное значение Pmus, в соответствии с предположением, что Ev приблизительно равно нулю. На фиг. 7-9 суррогатное значение давления мышц (т.е. сплошная линия на нижнем графике каждой фигуры), вычисленное через центральное венозное давление (или давление в правом предсердии в случае исследований с имитацией, представленных в настоящем документе) ведет себя наподобие фактическому Pmus(t) (т.е. пунктирная линия на нижнем графике каждой фигуры). Одно отличие заключается в том, что в сигнале суррогатного значения наблюдаются колебания более высокой частоты, которые не присутствуют в сигнале фактического давления дыхательных мышц - эти колебания более высокой частоты представляют собой колебания, обусловленные сокращениями сердца. Колебания, обусловленные работой сердца, могут существенно влиять на получаемый сигнал суррогатного значения Pmus,surr(t) и, таким образом, его желательно подвергать фильтрации. Соответствующая фильтрация потенциально может включать использование сигналов электрокардиограммы (ЭКГ) для более точного определения колебаний, индуцированных сердечно-сосудистой системой, или определения колебаний, обусловленных работой сердца, в качестве периодических импульсов в ЦВД с сопоставлением изменения известной «целесообразной» частоты пульса, например, от 60 до 150 ударов в минуту, у обычного здорового взрослого человека.
Несмотря на то, что терапия с механической искусственной вентиляцией легких (МИВЛ) использовалась в ОИТ на протяжении долгих лет, она по-прежнему далека от оптимальной. В частности, асинхронность устройства для искусственной вентиляции легких пациента является одной из главных проблем, связанных с использованием МИВЛ для пациентов, которые не полностью находятся под седативным действием/парализованы и способны делать самостоятельные дыхательные усилия. Асинхронность устройства для искусственной вентиляции легких пациента происходит тогда, когда время цикла устройства для искусственной вентиляции легких не совпадает с временем дыхательного цикла пациента. Высокие уровни асинхронности связаны с увеличенной дыхательной работой, более длительной МИВЛ, более высокой частотой выполнения трахеостомии, невозможности отмены ИВЛ, более длительным пребыванием в ОИТ и госпитализацией, а также, следовательно, увеличенными затратами на здравоохранение и неблагоприятными исходами у пациентов.
Существует два класса асинхронности устройства для искусственной вентиляции легких пациента, которые далее могут быть подразделены в целом на 5 разных подтипов. Асинхронности запуска относятся к ситуации, при которой начало неврального периода вдоха (невральный Ti) не совпадает с началом периода вдоха в устройстве для искусственной вентиляции легких (механический Ti). В этом классе может быть определено два подтипа асинхронности: неэффективный запуск и автозапуск. Асинхронности, связанные с выключением, относятся к ситуации, при которой конец неврального Ti не совпадает с концом механического Ti. В этом классе может быть определено три подтипа асинхронности: отложенное выключение; раннее выключение и двойной запуск.
Используемый в настоящем документе термин «неэффективный запуск» (и его варианты) относится к асинхронности устройства для искусственной вентиляции легких пациента, при которой пациент начинает усилие на вдохе, которое не запускает устройство для искусственной вентиляции легких.
Используемый в настоящем документе термин «автозапуск» (и его варианты) относится к асинхронности устройства для искусственной вентиляции легких пациента, при которой происходит запуск устройства для искусственной вентиляции легких без наличия какого-либо самостоятельного усилия на вдохе у пациента.
Используемый в настоящем документе термин «отложенное выключение» (и его варианты) относится к асинхронности устройства для искусственной вентиляции легких пациента, при которой выключение устройства для искусственной вентиляции легких (т.е. прекращение активной доставки давления или потока) происходит после окончания неврального Ti.
Используемый в настоящем документе термин «раннее выключение» (и его варианты) относится к асинхронности устройства для искусственной вентиляции легких пациента, при которой выключение устройства для искусственной вентиляции легких (т.е. прекращение активной доставки давления или потока) происходит перед окончанием неврального Ti.
Используемый в настоящем документе термин «двойной запуск» (и его варианты) относится к асинхронности устройства для искусственной вентиляции легких пациента, при которой преждевременное прекращение поддержки устройством для искусственной вентиляции легких обуславливает возникновение двойного цикла вдоха в пределах одного и того же дыхательного цикла.
На фиг. 10 изображен вариант реализации аппарата 10 для мониторинга дыхания. В некоторых вариантах реализации аппарат 10 для мониторинга дыхания может содержать устройство 12 для механической искусственной вентиляции легких, выполненное с возможностью механической доставки искусственной вентиляции легких пациенту 14. Таким образом, аппарат 10 для мониторинга дыхания также может называться устройством для механической искусственной вентиляции легких.
Аппарат 10 для механической искусственной вентиляции легких используют для обеспечения механической искусственной вентиляции легких пациенту посредством устройства 12 для механической искусственной вентиляции легких, которое доставляет поток воздуха и/или давление, в соответствии с настройками устройства для искусственной вентиляции легких, пациенту 14, которому проводят искусственную вентиляцию легких, через впускной шланг 16 для воздуха. Воздух после выдоха возвращается в устройство 12 для искусственной вентиляции легких через шланг 18 для воздуха после выдоха. Y-деталь или Т-деталь 20 (или, в качестве альтернативы, эндотрахеальная трубка, или, в некоторых случаях, полнолицевая маска) подает воздух от выпускного конца впускного шланга 16 для воздуха к пациенту 14, которому проводят искусственную вентиляцию легких, во время вдоха и подает воздух после выдоха пациента 14, которому проводят искусственную вентиляцию легких, в шланг 18 для воздуха после выдоха во время выдоха. На фиг. 10 не показаны многочисленные другие вспомогательные компоненты, которые могут быть предусмотрены в зависимости от режима искусственной вентиляции легких и другой терапии, получаемой пациентом 14, которому проводят искусственную вентиляцию легких. Такие вспомогательные компоненты могут содержать, в качестве иллюстрации: кислородный баллон или другой источник кислорода для медицинского использования для доставки контролируемого уровня кислорода в поток воздуха, как правило контролируемый настройкой устройства для искусственной вентиляции легких, представляющей собой процент кислорода (FiO2) во вдыхаемом воздухе; увлажнитель, установленный во впускной линии 16; назогастральный зонд для подачи пациенту 14 питательных веществ; и подобное. Устройство 12 для механической искусственной вентиляции легких содержит интерфейс пользователя, содержащий, в иллюстративном примере, сенсорное устройство 22 отображения, через которое врач, специалист по дыхательной терапии или другой медицинский работник может визуализировать настройки устройства для искусственной вентиляции легких и выполнять мониторинг измеренных физиологических переменных (например, давления и потока воздуха в дыхательных путях) и рабочих параметров устройства 12 для механической искусственной вентиляции легких. В дополнение или в качестве альтернативы, интерфейс пользователя может содержать физические управляющие элементы для ввода пользователем (кнопки, диски, переключатели и так далее), клавиатуру, мышь, устройство(а) для звукового предупреждения, световой(ые) индикатор(ы) или подобное.
Кроме того, мониторинг пациента 14 выполняют посредством датчика 24 центрального венозного давления (ЦВД), выполненного с возможностью измерения сигнала ЦВД пациента, необязательного датчика 26 электрокардиограммы (ЭКГ), выполненного с возможностью измерения сигнала ЭКГ пациента, датчика 28 потока в дыхательных путях, выполненного с возможностью измерения потока воздуха в дыхательных путях с зависимостью от времени для пациента на устройстве 12 для механической искусственной вентиляции легких, и датчика 30 давления в дыхательных путях, выполненного с возможностью измерения давления в дыхательных путях с зависимостью от времени для пациента на устройстве 12 для механической искусственной вентиляции легких. Мониторинг пациента можно выполнять другими датчиками (не показаны), такими как датчик частоты дыхания, датчик SpО2 или другие. Каждый из иллюстративных датчиков 24, 26, 28, 30 более подробно описан ниже.
Датчик 24 ЦВД выполнен с возможностью измерения сигнала ЦВД пациента 14. Датчик 24 ЦВД вводят в кровеносный сосуд, более конкретно, в крупную вену, около правого предсердия сердца (т.е. нижнюю полую вену). Предпочтительно, давление Pra в правом предсердии связано с давлением (Ppl) в полости грудной клетки между стенкой грудной клетки и легкими пациента и (вместе с потоком воздуха) с давлением дыхательных мышц через уравнение 3, и, следовательно, сигнал давления ЦВД может быть использован для извлечения информации о дыхании пациента 14. Для этой цели, аппарат 10 для мониторинга дыхания содержит по меньшей мере один процессор, который запрограммирован на генерирование информации о дыхании пациента. Например, иллюстративный по меньшей мере один процессор содержит интегрирующий процессор 32, процессор 34 регистрации дыхательного движения, процессор 36 суррогатного значения давления мышц по каждому дыхательному движению, фильтрующий процессор 38, процессор 40 регистрации, процессор 42 оценки параметров/переменных дыхания по каждому дыхательному движению и вычислитель 44 РД.
Интегрирующий процессор 32 вычисляет объем воздуха  . Кроме того, поскольку подходы, описанные в настоящем документе, функционируют на основе каждого дыхательного движения, процессор 34 регистрации дыхательного движения выполнен с возможностью регистрации начала вдоха путем анализа полученного образца потока воздуха. Затем, каждое последующее дыхательное движение определяют, интервал от начала одного периода вдоха до начала следующего периода вдоха. Каждое дыхательное движение, определенное анализатором дыхательного движения, длится в течение интервала времени [0,Ttot], где время 0 соответствует первому образцу в начале периода вдоха, а время Ttot соответствует концу дыхательного движения, то есть последнему образцу перед началом следующего дыхательного движения. Процессор 36 суррогатного значения давления мышц по каждому дыхательному движению запрограммирован на прием: (1) сигнала ЦВД от датчика 24 ЦВД; и (2) объема воздуха от интегрирующего процессора 32. Для каждого интервала дыхательного движения, определенного процессором 34 регистрации дыхательного движения, процессор 36 суррогатного значения давления мышц по каждому дыхательному движению запрограммирован на сегментацию сигналов ЦВД и объема воздуха на интервалы дыхательного движения (т.е. отдельные дыхательные движения) и вычисление сигнала суррогатного значения давления дыхательных мышц, Pmus,surr(t), с зависимостью от времени с использованием уравнения 3 (представленного здесь).
. Кроме того, поскольку подходы, описанные в настоящем документе, функционируют на основе каждого дыхательного движения, процессор 34 регистрации дыхательного движения выполнен с возможностью регистрации начала вдоха путем анализа полученного образца потока воздуха. Затем, каждое последующее дыхательное движение определяют, интервал от начала одного периода вдоха до начала следующего периода вдоха. Каждое дыхательное движение, определенное анализатором дыхательного движения, длится в течение интервала времени [0,Ttot], где время 0 соответствует первому образцу в начале периода вдоха, а время Ttot соответствует концу дыхательного движения, то есть последнему образцу перед началом следующего дыхательного движения. Процессор 36 суррогатного значения давления мышц по каждому дыхательному движению запрограммирован на прием: (1) сигнала ЦВД от датчика 24 ЦВД; и (2) объема воздуха от интегрирующего процессора 32. Для каждого интервала дыхательного движения, определенного процессором 34 регистрации дыхательного движения, процессор 36 суррогатного значения давления мышц по каждому дыхательному движению запрограммирован на сегментацию сигналов ЦВД и объема воздуха на интервалы дыхательного движения (т.е. отдельные дыхательные движения) и вычисление сигнала суррогатного значения давления дыхательных мышц, Pmus,surr(t), с зависимостью от времени с использованием уравнения 3 (представленного здесь).

где
t принадлежит интервалу [0,Ttot] дыхательного движения,
CVP(t) обозначает сигнал ЦВД,
Ecw обозначает эластичность стенки грудной клетки,
Vair обозначает объем воздуха в легких, вычисленный интегрирующим процессором 32, а
Ро соответствует постоянному значению.
Определение члена смещения Ро не является важным, поскольку сигнал истинного мышечного давления всегда смещен для того, чтобы начинаться с нулевого значения и заканчиваться на нем. Кроме того, в вариантах применения, для которых волновой сигнал Pmus представляет интерес (например, для определения монотонно увеличивающихся или уменьшающихся областей, двойных пиков или другой такой динамической структуры), выбор значения Ро не является существенным.
Затем, сигнал Pmus,surr по каждому дыхательному движению передают на фильтрующий процессор 38. В этой точке, сегментированный сигнал ЦВД и/или сигнал Pmus,surr также может быть отображен на устройстве 22 отображения аппарата 10 для мониторинга дыхания. На фиг. 11А изображен сегментированный сигнал ЦВД, отображенный на устройстве 22 отображения, для дыхательного движения с двойным усилием на вдохе, а на фиг. 11B изображен сегментированный сигнал ЦВД, отображенный на устройстве 22 отображения для дыхательного движения с усилием на выдохе. Как на фиг. 11А, так и на фиг. 11B, давление Pra в правом предсердии (подходящим образом представлено как ЦВД) было сегментировано с временными выборками, заданными детектором 34 дыхательного движения.
Фильтрующий процессор 38 запрограммирован на прием сигнала Pmus,surr по каждому дыхательному движению от процессора 36 суррогатного значения давления мышц по каждому дыхательному движению. В некоторых вариантах реализации, когда вовлечен датчик 26 ЭКГ, фильтрующий процессор 38 также запрограммирован на прием сигнала ЭКГ отдатчика 26 ЭКГ и сегментацию сигнала ЭКГ на интервалы дыхательного движения, в соответствии с выходными данными детектора 34 дыхательного движения. Фильтрующий процессор 38 запрограммирован на фильтрацию принятого сигнала Pmus,surr для удаления компонента работы сердца из сигнала. В некоторых вариантах реализации, когда датчик 26 ЭКГ не используют, фильтрующий процессор 38 запрограммирован на удаление данных из сигнала Pmus,surr, являющихся показательными в отношении работы сердца пациента 14. Например, ожидается, что сердечные колебания в сигнале Pmus,surr являются по существу периодическими по своей природе с частотой, которая значительно выше частоты дыхания. Таким образом, фильтрующий процессор 38 может определять то, какие части сигнала Pmus,surr подлежат фильтрации. Еще в одном примере, когда используют датчик 26 ЭКГ, фильтрующий процессор 38 запрограммирован на использование принятого сигнала ЭКГ для фильтрации (т.е. «удаления») частей сигнала Pmus,surr, которые являются показательными в отношении работы сердца пациента. В варианте реализации сначала может быть отфильтрован компонент работы сердца из сигнала ЦВД с последующим вычислением сигнала суррогатного значения дыхательных мышц.
В этой точке отфильтрованный сигнал Pmus,surr может быть отображен на устройстве 22 отображения. На фиг. 12А изображен сигнал суррогатного значения Pmus, отображенный на устройстве 22 отображения, для дыхательного движения с двойным усилием на вдохе, а на фиг. 12В изображен сигнал суррогатного значения Pmus, отображенный на устройстве 22 отображения для дыхательного движения с усилием на выдохе. Как на фиг. 12А, так и на фиг. 12В, сигнал Pmus,surr, вычисленный в уравнении 3, был отфильтрован для удаления компонентов работы сердца из сигнала суррогатного значения; небольшие пики, например, на приблизительно 421 с, 422 с и 423 с на фиг. 12А, являются остаточным сигналом работы сердца, оставшимся после фильтрации.
Следует понимать, что сгенерированная информация о дыхании пациента 14 может содержать: (1) сигнал суррогатного значения внутриплеврального давления, приравненный к сегментированному и отфильтрованному сигналу ЦВД (т.е. значению сегментированного и отфильтрованного сигнала ЦВД, см. уравнение 2); (2) волновой сигнал суррогатного значения давления дыхательных мышц, определенную для каждого интервала дыхательного движения из сегментированного сигнала ЦВД (т.е. Pmus,surr, см. уравнение 3); и тому подобное (например, РД или СД). В некоторых вариантах реализации каждый тип сгенерированной информации о дыхании может быть отображен на устройстве 22 отображения.
В некоторых вариантах реализации процессор 40 регистрации запрограммирован на регистрацию или извлечение признаков вычисленного сигнала Pmus суррогатного значения для определения формы сигнала. Например, процессор 40 регистрации запрограммирован на регистрацию множества пиков 46 и 48 в сегментированном и отфильтрованном сигнале Pmus,surr. Процессор регистрации запрограммирован на генерирование сегментов информации о дыхании (например, CVP(t), Pmus,surr(t) и тому подобное) по интервалам времени, ограниченным пиками, из определенных пиков 46 и 48. Пики 46 соответствуют положительным пикам, а пики 48 соответствуют отрицательным пикам. Процессор 40 регистрации запрограммирован на определение положительных пиков 46, отрицательных пиков 48 и монотонности сегментов между пиками, т.е. сегментов с отрицательной монотонностью 50, с положительной монотонностью 52 и постоянным значением 54. Форма сигнала Pmus суррогатного значения может быть использована для изменения ограничений или параметров в соответствующем алгоритме OO и/или алгоритме ПО, включенном в процессоре 42 оценки параметров/переменных дыхания по каждому дыхательному движению. Например, физиологические сведения о форме профиля мышечного давления могут содержаться в процессоре 42 оценки параметров/переменных дыхания в форме ограничений Pmus(t) области. В подходе с OO такие монотонные области выражают в наборе неравенств и равенств, а желаемые параметры дыхательной системы и профиль Pmus(t) оценивают путем проблемы ограниченной оптимизации, квадратичная функция затрат которой подвержена воздействию со стороны вышеуказанных ограничений области. В другом аспекте в подходе с ПО используют простые реальные математические шаблоны для выражения линейного кусочного параметризированного Pmus(t) за одно дыхательное движение. Вычислитель 44 РД запрограммирован на обработку оцененного Pmus(t) по каждому дыхательному движению от процессора 42 оценки и запрограммирован на вычисление значения для работы дыхания (или силы дыхания) пациента, в соответствии с уравнением  (или
(или  , где T представляет собой некоторый выбранный интервал времени, предпочтительно, охватывающий несколько дыхательных движений).
, где T представляет собой некоторый выбранный интервал времени, предпочтительно, охватывающий несколько дыхательных движений).
Например, процессор 40 регистрации может содержать любое подходящее аппаратное обеспечение (например, схему для определения пиков с диодом и конденсатором) или программное обеспечение (например, сочетаемую фильтрацию с алгоритмом экспериментального определения шума, векторный алгоритм определения пиков, алгоритм выравнивания по методу наименьших квадратов, алгоритм оптимизации определения пиков, алгоритм на основе производных или подобные) для определения пиков. В иллюстративных вариантах реализации, описанных в настоящем документе, процессор 40 регистрации использует модуль 56 на основе производных для определения пиков Pmus,surr(t) в сравнении с сигналом времени. Следует понимать, что модуль 56 на основе производных также содержит любые подходящие алгоритмы для процессов обработки сигнала (например, фильтрации, уменьшения соотношения сигнал-шум, сглаживания данных и подобного). Как описано более подробно ниже, модуль 56 на основе производных выполнен с возможностью определения одного или более нарушений в паттерне дыхания исходя из результатов определения пиков, как более подробно описано ниже. Модуль 56 на основе производных выполнен с возможностью определения значений пиков 46, 48 (например, значений «оси у» Pmus,surr(t) в сравнении с сигналом времени, как более подробно описано ниже) и связанных значений моментов времени (например, значений «оси х»), в которые происходят эти пики. Из пиков 46, 48 может быть определена форма сигнала Pmus,surr. Определенные сегменты отличительной монотонности для сигналов Pmus,surr(t) изображены на фиг. 13А и 13В для дыхательного движения с двойным усилием на вдохе (фиг. 13А) и дыхательного движения с усилием на выдохе (фиг. 13В).
На фиг. 14 изображен еще один вариант реализации аппарата 10' для механической искусственной вентиляции легких, в котором информацию о дыхании, по меньшей мере частично полученную из результатов измерения ЦВД, используют для выдачи управляющей рекомендации для устройства для искусственной вентиляции легких с разомкнутым циклом или управления автоматическим устройством для искусственной вентиляции легких с замкнутым циклом. Аппарат 10' для механической искусственной вентиляции легких может быть выполнено по существу идентичным аппарату 10 для механической искусственной вентиляции легких, изображенному на фиг. 10, за исключением того, что описано ниже.
Аппарат 10' для механической искусственной вентиляции легких содержит 12 устройство для механической искусственной вентиляции легких (и связанные компоненты), датчик 24 ЦВД, необязательный датчик 26 ЭКГ, датчик 28 потока воздуха, датчик 30 давления в дыхательных путях, интегрирующий процессор 32, процессор 34 регистрации дыхательного движения, процессор 36 суррогатного значения давления мышц по каждому дыхательному движению, фильтрующий процессор 38, процессор 40 регистрации, процессор 42 оценки параметров/переменных дыхания по каждому дыхательному движению и вычислитель 44 РД, а также устройство 22 отображения, как описано выше. Кроме того, аппарат 10' для искусственной вентиляции легких содержит процессор 58 классификации, который более подробно описан ниже.
Как описано выше, интегрирующий процессор 32 вычисляет интеграл потока воздуха по времени, а процессор 34 регистрации дыхательного движения определяет начало вдоха и определяет интервал [0, Ttot] дыхательного движения для каждого дыхательного движения. Процессор 36 суррогатного значения давления мышц по каждому дыхательному движению запрограммирован на прием сигнала ЦВД отдатчика 24 ЦВД, объема воздуха от интегратора 32 и интервала дыхательного движения от процессора 34 регистрации дыхательного движения. Процессор 36 запрограммирован на сегментацию сигналов ЦВД и объема с использованием моментов времени интервала дыхательного движения и вычисление сигнала суррогатного значения давления мышц по каждому дыхательному движению, как описано выше.
Сигнал Pmus,surr по каждому дыхательному движению передают на фильтрующий процессор 38, где он фильтруется так, как описано выше. Необязательный сигнал ЭКГ от датчика 36 ЭКГ также может быть использован фильтрующим процессором 38 для улучшения процесса фильтрации. Отфильтрованный сигнал Pmus,surr по каждому дыхательному движению затем обрабатывают процессором 40 регистрации для определения его пиков 46, 48. Эти сигналы с определенными пиками могут быть отображены на устройстве 22 отображения. Кроме того, сигнал с определенным пиком передают на процессор 58 классификации.
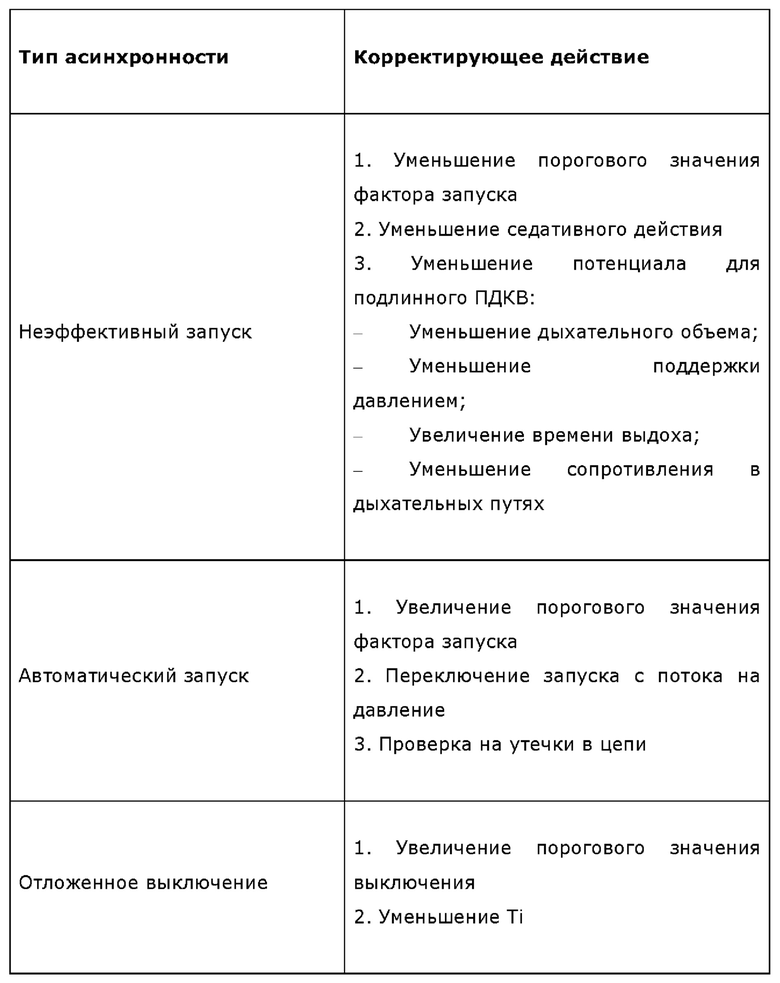
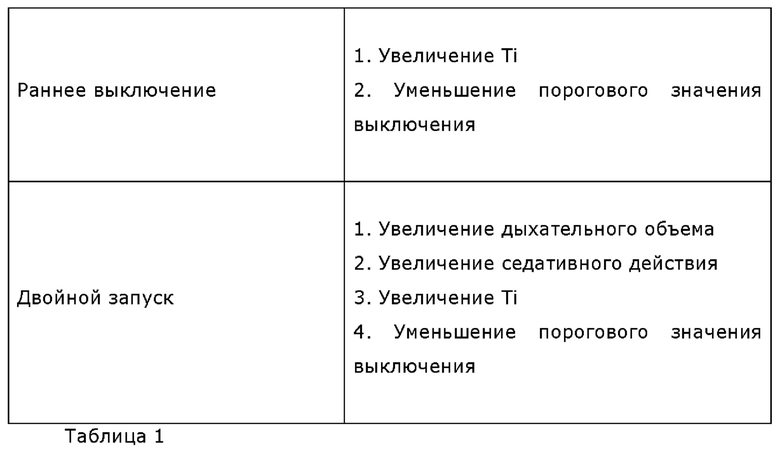
Процессор 58 классификации запрограммирован на классифицирование, по каждому дыхательному движению, асинхронности исходя из извлеченного (т.е. с определенным пиком) сигнала Pmus,surr, давления в дыхательных путях, потока воздуха и сигналов объема, на по меньшей мере одно из: асинхронность отсутствует; неэффективный запуск; автоматический запуск; отложенное выключение; раннее выключение и двойной запуск. На фиг. 15 изображены примеры отображенного сигнала для каждого типа асинхронности. Процессор 58 классификации может быть выполнен в виде искусственной нейронной сети, алгоритма логистической регрессии, алгоритма байесовской классификации и подобного.
На фиг. 14 показано, что процессор 58 классификации выполнен с возможностью приема результатов определения пиков и монотонности от модуля 56 на основе производных в процессоре 40 регистрации. Процессор 58 классификации выполнен с возможностью обозначения любых неправильных/ненормальных дыхательных движений и определения типа асинхронности искусственной вентиляции легких пациента из этих результатов определения пиков и монотонности (например, неэффективный запуск; автоматический запуск; отложенное выключение; раннее выключение и двойной запуск). Процессор 58 классификации затем «маркирует» асинхронность и может присвоить соответствующее обозначение типу асинхронности, как более подробно описано ниже. Обозначение затем передают и отображают на устройстве 22 отображения.
Затем процессор 58 классификации анализирует извлеченный сигнал суррогатного значения давления мышц из процессора 40 регистрации вместе с давлением в дыхательных путях, потоком воздуха и волновыми сигналами объема для определения типа асинхронности. В примере, изображенном на фиг. 13А и 13В, отфильтрованный сигнал суррогатного значения давления мышц содержит множество пиков, являющихся положительными 46 или отрицательными 48, а также различные области разной монотонности, такие как отрицательные 50, положительные 52 или постоянное значение 54. Путем использования сигналов, изображенных на фиг. 15, в качестве «шаблона», процессор 58 классификации может сравнивать шаблоны с фактическими измеренными сигналами давления и потока воздуха в дыхательных путях, и/или использовать положения пиков 46, 48 и сегменты разной монотонности 50, 52, 54 в сигнале суррогатного значения давления мышц для определения типа асинхронности. Вследствие расположения отрицательных и положительных пиков 46 и 48 (описанных выше), процессор 58 классификации определяет, что лежащее в основе усилие давление мышц подвержено двойному усилию на вдохе (фиг. 13А) или усилию на выдохе (фиг. 13В). Процессор 58 классификации затем маркирует тип асинхронности, например, возможная асинхронность с двойным запуском для фиг. 13А и асинхронность с отложенным выключением для фиг. 13В, и отправляет обозначение асинхронности (т.е. числовое значение) на компонент устройства 22 отображения, где оно отображается медицинскому специалисту (например, медсестре, врачу и т.п.).
В других вариантах реализации, при определении асинхронности, обозначение и/или отображенный сигнал Pmus,surr(t) сообщает медицинскому специалисту о наличии асинхронности. Кроме того, процессор 58 классификации запрограммирован на предложение рекомендации для медицинского специалиста касательно регулировки настроек устройства 12 для механической искусственной вентиляции легких с целью корректировки асинхронности. Рекомендацию отображают на устройстве 22 отображения. После этого, медицинский специалист может отрегулировать настройки устройства 12 для искусственной вентиляции легких таким образом, чтобы асинхронность более не присутствовала. Таким образом, аппарат 10' для механической искусственной вентиляции легких представляет собой аппарат с разомкнутым циклом. Краткое описание подходящего(их) корректирующего(их) действия(й) для каждого типа асинхронности приведено в таблице 1 ниже.
Еще в одних вариантах реализации аппарат 10' для механической искусственной вентиляции легких дополнительно запрограммирован на автоматическую регулировку настроек устройства 12 для механической искусственной вентиляции легких для корректировки асинхронности. С этой целью, аппарат 10' для механической искусственной вентиляции легких содержит контроллер 60 с замкнутым циклом. В некоторых вариантах реализации контроллер 60 с замкнутым циклом может быть выполнен в виде контроллера силы дыхания или работы дыхания. В таком случае, в контроллер 60 встроены процессор 42 оценки параметров/переменных дыхания по каждому дыхательному движению и вычислитель 44 РД/СД. Контроллер 60 с замкнутым циклом запрограммирован на вычисление силы (или работы) дыхания пациента путем вычисления интеграла по времени производного оцененного Pmus(t) от 42 и потока воздуха, а также на регулировку настройки устройства для искусственной вентиляции легких исходя из разности между фактической и желаемой силой или работой дыхания для оптимальной поддержки самостоятельного дыхательного усилия пациента. Такой контроллер с замкнутым циклом описан в патентной публикации США №2015/0059754, включенной в настоящий документ в полном объеме. В вариантах реализации, описанных в настоящем документе, вывод обозначения процессором 58 классификации также представляет собой входные данные для контроллера 60 устройства для искусственной вентиляции легких с замкнутым циклом. Если обозначение указывает на асинхронность дыхания, то контроллер 60 устройства для искусственной вентиляции легких с замкнутым циклом может предпринять соответствующее действие, такое как сохранение текущей настройки устройства для искусственной вентиляции легких в виде разомкнутого цикла или регулировка настроек устройства для искусственной вентиляции легких исходя из определенного состояния асинхронности исходя из рекомендаций, перечисленных в таблице 1. В других вариантах реализации контроллер 60 может представлять собой контроллер на несколько входных и несколько выходных потоков (multiple-input and multiple-output, MIMO), который принимает, помимо значения РД/СД, дополнительные физиологические переменные, такие как SpO2, СО2 в конце выдоха и/или средние значения давления артериальной крови, и соответствующим образом регулирует множество настроек устройства для искусственной вентиляции легких, таких как уровень поддержки давлением, давление в конце выдоха, чувствительность запуска и выключения и/или фракция кислорода в подаваемом воздухе.
Следует также понимать, что различные сигналы и значения, описанные в настоящем документе, могут быть переданы на различные процессоры 36, 38, 40, 58 и компоненты 12, 22, 42, 44, 60 по сети передачи данных (например, сети беспроводной связи, локальной вычислительной сети, глобальной вычислительной сети, персональной сети, сети BLUETOOTH® и т.п.). В качестве альтернативы, компоненты 36, 38, 40, 42, 44, 58 и контроллер 60 могут быть встроены в устройство 12 для механической искусственной вентиляции легких (например, исполняемые на микропроцессоре или микроконтроллере устройства 12 для искусственной вентиляции легких), в случае чего данные с датчиков 24, 26, 28, 30 собираются устройством 12 для искусственной вентиляции легких и, таким образом, являются доступными для компонентов 36, 38, 40, 42, 44, 58 и контроллера 60. Еще в одном предполагаемом варианте реализации, алгоритмы процессоров реализованы на микропроцессоре монитора пациента (не показан), который отображает показатели жизненно важных функций, такие как частота сердечных сокращений, частота дыхания, кровяное давление или подобное, и выходные данные этих процессоров 36, 38, 40, 58 и компонентов 42, 44 подходящим образом отображаются на компоненте устройства отображения в мониторе пациента.
На фиг. 16 изображен способ 100 улучшения оценки параметра дыхания в случае паттерна дыхания с нарушением. Способ 100 включает прием сигнала ЦВД, сигнала давления в дыхательных путях, сигнала потока воздуха и сигнала ЭКГ пациента от соответствующего датчика 24, 26, 28, 30 (102). Принятые сигналы для каждого дыхательного движения пациента сегментируют (104). Сигнал суррогатного значения давления дыхательных мышц, сгенерированный пациентом, вычисляют для каждого сегментированного дыхательного движения (106). Данные, указывающие на работу сердца пациента, фильтруют из сигнала суррогатного значения давления мышц (108). Извлекают пики в отфильтрованном сигнале (110). Области положительной монотонности, отрицательной монотонности и постоянные значения определяют на отфильтрованном сигнале (112). Базовые предположения касательно формы лежащего в основе профиля давления мышц в алгоритмах ОО и ПО модифицируют (114). Выдают более точную оценку усилия дыхательных мышц и параметров дыхательной системы пациента (116).
На фиг. 17 изображен способ 200 предположения или автоматического выполнения корректирующего действия в отношении выбранных настроек устройства для искусственной вентиляции легких после определения события асинхронности устройства для искусственной вентиляции легких пациента. Способ 200 включает прием сигнала ЦВД, сигнала давления в дыхательных путях, сигнала потока воздуха и сигнала ЭКГ пациента от соответствующего датчика 24, 26, 28, 30 (202). Принятые сигналы для каждого дыхательного движения пациента сегментируют (204). Сигнал суррогатного значения давления дыхательных мышц, сгенерированный пациентом, вычисляют для каждого сегментированного дыхательного движения (206). Данные, являющиеся показательными в отношении работы сердца пациента, фильтруют из сигнала суррогатного значения давления мышц (208). Извлекают пики в отфильтрованном сигнале (210). Области положительной монотонности, отрицательной монотонности и постоянные значения определяют на отфильтрованном сигнале (212). Асинхронность классифицируют исходя из общей формы сигнала давления мышц и измеренного сигнала давления в дыхательных путях и сигнала потока воздуха (214). Предлагают рекомендацию в отношении регулировки настроек устройства для искусственной вентиляции легких, или настройки устройства для искусственной вентиляции легких регулируют автоматически (216).
Различные компоненты 36, 38, 40, 42, 44, 58 для обработки данных и контроллер 60 подходящим образом реализованы в виде микропроцессора, запрограммированного аппаратным или программным обеспечением на выполнение описанных операций. В некоторых вариантах реализации микропроцессор выполнен за единое целое с устройством 12 для механической искусственной вентиляции легких, так что обработка данных прямым образом выполняется устройством 12 для искусственной вентиляции легких. В других вариантах реализации микропроцессор находится отдельно от устройства 12 для механической искусственной вентиляции легких, например, представляет собой микропроцессор стационарного компьютера. Различные компоненты 36, 38, 40, 42, 44, 58 для обработки данных и контроллер 60 аппарата для механической искусственной вентиляции легких также могут быть реализованы в виде некратковременного носителя, хранящего инструкции, выполненные с возможностью считывания и исполнения микропроцессором (например, как описано выше) для реализации описанных операций. Некратковременный носитель может содержать, например, оперативное запоминающее устройство (ОЗУ), программируемое постоянное запоминающее устройство (ППЗУ), флеш-накопитель или другой репозиторий программно-аппаратного обеспечения для устройства 12 для искусственной вентиляции легких. В дополнение или в качестве альтернативы, некратковременный носитель может содержать жесткий диск компьютера (подходящий для реализуемых на компьютере вариантов реализации), оптический диск (например, для установки на таком компьютере), хранилище данных на сетевом сервере (например, RAID-массив), с которого устройство 12 для искусственной вентиляции легких или компьютер может загружать программное или программно-аппаратное обеспечения для аппарата через сеть Интернет или другую электронную сеть передачи данных, или т.п.
Настоящее изобретение было описано со ссылкой на предпочтительные варианты реализации. Специалистам в данной области техники могут быть ясны модификации и изменения после прочтения и понимания представленного выше подробного описания. Предполагается, что настоящее изобретение выполняют так, чтобы включить все такие модификации и изменения в такой мере, в какой они находятся в пределах объема прилагаемой формулы изобретения или ее эквивалентов.
Изобретение относится к медицинской технике. Аппарат механической искусственной вентиляции легких и мониторинга дыхания содержит устройство для механической искусственной вентиляции легких пациенту, датчик центрального венозного давления (ЦВД) пациента, датчик на устройстве для механической искусственной вентиляции легких для измерения потока воздуха в дыхательных путях пациента в зависимости от времени и процессор для обработки сигнала ЦВД и генерирования информации о дыхании пациента. При этом обеспечивают сегментацию сигнала ЦВД исходя из определенных интервалов дыхательного движения, вычисление сигнала давления дыхательных мышц из сегментированного сигнала ЦВД и потока воздуха в дыхательных путях с зависимостью от времени, фильтрацию сигнала давления дыхательных мышц для удаления компонента работы сердца из сигнала давления дыхательных мышц, прием зависящей от времени метки начала вдоха по каждому дыхательному движению пациента от устройства для механической искусственной вентиляции легких, определение интервалов дыхательного движения пациента из меток начала вдоха, вычисление давления дыхательных мышц с зависимостью от времени. Обеспечивается устранение асинхронности устройства для искусственной вентиляции легких с дыхательным усилием пациента за счет точной оценки начала и прекращения дыхательной деятельности пациента, синхронного запуска и прекращения каждого механически поддерживаемого дыхательного движения в соответствии с потребностями пациента. 2 н. и 9 з.п. ф-лы, 1 табл., 17 ил.
1. Аппарат (10) для мониторинга дыхания, содержащий:
устройство (12) для механической искусственной вентиляции легких, выполненное с возможностью обеспечения механической искусственной вентиляции легких пациенту;
датчик (24) центрального венозного давления, выполненный с возможностью измерения сигнала центрального венозного давления (ЦВД) пациента;
по меньшей мере один датчик (28, 30) дыхательных путей на устройстве (12) для механической искусственной вентиляции легких, выполненный с возможностью измерения давления и потока воздуха в дыхательных путях пациента в зависимости от времени; и
по меньшей мере один процессор (32, 34, 36, 38, 40, 42, 44, 58), запрограммированный на обработку сигнала ЦВД для генерирования информации о дыхании пациента путем операций, включающих:
сегментацию сигнала ЦВД исходя из определенных интервалов дыхательного движения;
вычисление сигнала давления дыхательных мышц из сегментированного сигнала ЦВД и потока воздуха в дыхательных путях с зависимостью от времени и
фильтрацию сигнала давления дыхательных мышц для удаления компонента работы сердца из сигнала давления дыхательных мышц,
причем по меньшей мере один процессор (32, 34, 36, 38, 40, 42, 44, 58) также запрограммирован на:
прием метки начала вдоха, зависящей от времени, по каждому дыхательному движению пациента от устройства (12) для механической искусственной вентиляции легких и
определение интервалов дыхательного движения пациента из меток начала вдоха;
вычисление давления дыхательных мышц с зависимостью от времени из уравнения:
Pmus,surr(t) = CVP(t) –EcwVair(t) +P0;
где Pmus,surr(t) обозначает давление дыхательных мышц,
CVP(t) обозначает сигнал ЦВД,
Ecw обозначает эластичность стенки грудной клетки,
Vair обозначает объем воздуха в легких, вычисленный в виде интеграла потока воздуха с зависимостью от времени, а
P0 обозначает постоянное значение.
2. Аппарат (10) по п. 1, в котором сгенерированная информация о дыхании содержит по меньшей мере одно из:
сигнала внутриплеврального давления, определенного из сегментированного и отфильтрованного сигнала ЦВД,
волнового сигнала давления дыхательных мышц, определенного для каждого интервала дыхательного движения из сегментированного и отфильтрованного сигнала ЦВД и измеренного сигнала потока воздуха, интегрированного для определения сигнала объема воздуха.
3. Аппарат (10) по п. 1 или 2, также содержащий:
датчик (26) электрокардиограммы (ЭКГ), выполненный с возможностью измерения сигнала ЭКГ;
причем по меньшей мере один процессор (32, 34, 36, 38, 40, 42, 44, 58) запрограммирован на выполнение фильтрации с использованием сигнала ЭКГ, принятого от датчика (26) ЭКГ.
4. Аппарат (10) по любому из пп. 1-3, в котором по меньшей мере один процессор (32, 34, 36, 38, 40, 42, 44, 58) также запрограммирован на:
определение множества пиков (46, 48) в сегментированном и отфильтрованном сигнале давления дыхательных мышц и
генерирование информации о дыхании, содержащей волновой сигнал давления дыхательных мышц, содержащий сегменты волнового сигнала давления дыхательных мышц по интервалам времени, ограниченным пиками.
5. Аппарат (10) по п. 4, в котором по меньшей мере один процессор (32, 34, 36, 38, 40, 42, 44, 58) также запрограммирован на:
обновление настроек алгоритма ограниченной оптимизации и/или алгоритма параметрической оптимизации устройства (12) для механической искусственной вентиляции легких исходя из сигнала давления мышц с определенным пиком.
6. Аппарат (10') для механической искусственной вентиляции легких, содержащий:
устройство (12) для механической искусственной вентиляции легких;
по меньшей мере один датчик (28, 30) дыхательных путей на устройстве (12) для механической искусственной вентиляции легких, выполненный с возможностью измерения давления и потока воздуха в дыхательных путях пациента в зависимости от времени;
по меньшей мере один процессор (32, 34, 36, 38, 40, 42, 44, 58), запрограммированный на:
прием сигнала центрального венозного давления от датчика (24) центрального венозного давления;
прием сигнала потока воздуха с зависимостью от времени по пациенту по меньшей мере от одного датчика (28, 30) дыхательных путей;
вычисление сигнала давления дыхательных мышц с зависимостью от времени по каждому дыхательному движению пациента;
извлечение по меньшей мере одной характеристики дыхания из сигнала значения давления дыхательных мышц путем операций, включающих:
фильтрацию данных, являющихся показательными в отношении работы сердца пациента, из сигнала давления дыхательных мышц;
определение формы сигнала давления дыхательных мышц и
обновление настроек алгоритма ограниченной оптимизации и/или алгоритма параметрической оптимизации устройства (12) для механической искусственной вентиляции легких исходя из сигнала с определенной формой,
причём по меньшей мере один процессор (32, 34, 36, 38, 40, 42, 44, 58) также запрограммирован на:
прием метки о начале вдоха с зависимостью от времени по каждому дыхательному движению пациента и метки о начале выдоха с зависимостью от времени по каждому дыхательному движению пациента от устройства (12) для механической искусственной вентиляции легких; и
определение длительности каждого дыхательного движения пациента с зависимостью от времени из меток о начале вдоха и начале выдоха путем сегментации принятых меток и сигнала потока воздуха с зависимостью от времени для определения каждого дыхательного движения пациента;
и по меньшей мере один процессор (32, 34, 36, 38, 40, 42, 44, 58) также запрограммирован на:
- вычисление сигнала давления дыхательных мышц с зависимостью от времени, сгенерированного пациентом на устройстве (12) для механической искусственной вентиляции легких, из уравнения
Pmus,surr(t) = CVP(t) –EcwVair(t) +P0;
где P mus,surr(t) соответствует давлению дыхательных мышц,
CVP соответствует центральному венозному давлению,
Ecw соответствует эластичности стенки грудной клетки,
Vair соответствует объему воздуха в легких, вычисленному в виде интеграла потока воздуха с зависимостью от времени, а
P0 соответствует постоянному значению;
- отображение вычисленного значения давления дыхательных мышц на устройстве (22) отображения.
7. Аппарат (10') по п. 6, также содержащий:
датчик (26) электрокардиограммы (ЭКГ), выполненный с возможностью измерения данных, являющихся показательными в отношении работы сердца пациента;
причем по меньшей мере один процессор (32, 34, 36, 38, 40, 42, 44, 58) также запрограммирован на фильтрацию данных, являющихся показательными в отношении работы сердца пациента, из сегментированного сигнала с использованием данных о работе сердца, принятых от датчика (26) ЭКГ.
8. Аппарат (10’) по любому из пп. 6, 7, в котором по меньшей мере один процессор (32, 34, 36, 38, 40, 42, 44, 58) также запрограммирован на:
вычисление сигнала давления дыхательных мышц с зависимостью от времени, сгенерированного пациентом на устройстве (12) для механической искусственной вентиляции легких, из принятых сигналов центрального венозного давления и объема воздуха.
9. Аппарат (10’) по любому из пп. 6-8, в котором по меньшей мере один процессор (32, 34, 36, 38, 40, 42, 44, 58) также запрограммирован на:
извлечение множества пиков (46, 48) в отфильтрованном сигнале давления мышц, пиков (42, 44), соответствующих форме отфильтрованного сигнала.
10. Аппарат (10’) по любому из пп. 6-9, также содержащий:
процессор (58) классификации, запрограммированный на классифицирование асинхронности извлеченного сигнала по меньшей мере на следующее:
асинхронность отсутствует;
неэффективный запуск;
автоматический запуск;
отложенное выключение;
раннее выключение и
двойной запуск.
11. Аппарат (10’) по п. 10, в котором по меньшей мере один процессор (32, 34, 36, 38, 40, 42, 44, 58) также запрограммирован по меньшей мере на одно из следующего:
предложение рекомендации для медицинского специалиста для регулировки настроек устройства (12) для механической искусственной вентиляции легких для корректировки асинхронности, причем рекомендация отображается на устройстве (22) отображения; и
автоматическая регулировка настроек устройства (12) для механической искусственной вентиляции легких для корректировки асинхронности.
| US 2014116442 A1, 01.05.2014 | |||
| JP 3955011 B2, 08.08.2007 | |||
| EP 1485017 A2, 15.12.2004 | |||
| US 6723055 B2, 20.04.2004 | |||
| DE 102006002551 A1, 20.07.2006 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛЕГОЧНОГО КРОВОТОКА С ПОМОЩЬЮ ОБМЕНА КИСЛОРОДОМ И ИНЕРТНЫМ ГАЗОМ МЕЖДУ ЛЕГКИМИ И КРОВЬЮ | 1997 |
|
RU2203618C2 |

