Изобретение относится к устройству, системе и способу для строительства стационарных структур на рабочей поверхности.
Известна технология трехмерной печати, с помощью которой изготавливаются трехмерные объекты посредством свободного набрызгивания пластмассы на рабочую поверхность. При этом принтер использует банк данных с информацией о трехмерной форме подлежащего изготовлению объекта, с целью управления расположенным подвижно над рабочей поверхностью соплом или, соответственно, относительно положения и выдачи материала. Однако до настоящего времени эта технология ограничивалась по существу применениями, в которых использовались пластмассы, и изготовленный объект после его изготовления снимался с рабочей поверхности. За счет соответствующего вложения предварительно изготовленных дополнительных частей возможно также изготовление гетерогенных объектов.
Также известно применение при изготовлении стационарных бетонных конструктивных элементов так называемого шприцбетона. Например, в способе мокрого шприцевания бетона смешиваются цемент, заполнители и вода и с помощью растворонасоса подаются в распылительное сопло, из которого смесь с помощью подаваемого в сопло сжатого воздуха распыляется и наносится. Наряду с этим известен также способ сухого шприцевания, в котором цемент и заполнитель смешиваются в сухом виде и в потоке сжатого воздуха подаются через трубопровод или шланг в смесительное сопло. В зоне сопла в сухую смесь подается вода, с целью снабжения смеси необходимой водой затворения и последующего нанесения непрерывной струей.
Задачей изобретения является создание устройства и системы для обеспечения возможности, по образцу технологии трехмерной печати, частичной автоматизации или автоматизации при строительстве стационарных объектов. Кроме того, должен быть создан способ применения таких устройств и систем.
На этом фоне изобретение относится к устройству для строительства стационарных структур на рабочей поверхности, при этом устройство имеет каркас, который расположен вокруг рабочей поверхности, при этом предусмотрена рабочая головка, которая с помощью нескольких управляющих тросов удерживается на каркасе и расположена над рабочей поверхностью, при этом предусмотрены верхние управляющие тросы, которые проходят от каркаса над рабочей головкой, при этом предусмотрены нижние управляющие тросы, которые проходят от каркаса под рабочей головкой, при этом все управляющие тросы могут выпускаться из каркаса и втягиваться в каркас для изменения положения рабочей головки, и при этом предусмотрен управляющий блок, который соединен с исполнительными механизмами для вывода и втягивания управляющих тросов и предназначен для управления этими действиями для изменения положения рабочей головки.
Рабочая поверхность содержит совокупность горизонтальных положений, в которых может быть расположена рабочая головка. Поэтому она имеет форму четырехугольника, угловые точки которого заданы теми местами каркаса, в которых управляющие тросы отходят от каркаса. Естественно, что рабочая поверхность может быть также задана произвольно внутри этих границ.
В одном варианте выполнения количество верхних управляющих тросов соответствует количеству нижних управляющих тросов, при этом соответствующие пары верхних и нижних управляющих тросов предпочтительно проходят друг над другом.
В одном варианте выполнения предусмотрено по меньшей мере три верхних управляющих троса и/или по меньшей мере три нижних управляющих троса. В одном варианте выполнения предусмотрено ровно четыре верхних и ровно четыре нижних управляющих троса.
В одном варианте выполнения управляющие тросы являются волоконными канатами. Это обеспечивает подходящую гибкость и прочность на растяжение тросов. Например, искусственные волокна содержат полимер сложного эфира или т.п.
В одном варианте выполнения по меньшей мере один из управляющих тросов содержит проводник тока и/или проводник передачи данных. Таким образом, рабочая головка может снабжаться током или, соответственно, может обеспечиваться беспрепятственный поток данных.
В одном варианте выполнения рабочая головка содержит блок связи с интерфейсом для беспроводной связи для приема данных.
В одном варианте выполнения каркас непрерывно окружает рабочую поверхность.
В одном варианте выполнения каркас состоит из дискретно распределенных вокруг рабочей поверхности элементов каркаса.
Поскольку места каркаса, в которых управляющие тросы отходят от каркаса, задают правильный четырехугольник, то непрерывный каркас мажет также иметь форму правильного четырехугольника, или элементы прерывистого каркаса могут быть расположены в угловых точках четырехугольника. Если предусмотрено четыре верхних и/или четыре нижних управляющих троса, то места каркаса, в которых управляющие тросы отходят от каркаса, задают прямоугольник. В соответствии с этим, каркас может иметь форму прямоугольника. То же относится к трем верхним и/или трем нижним управляющим тросам (треугольник), пяти верхним и/или нижним управляющим тросам (пятиугольник) и к другим количествам управляющих тросов.
В одном варианте выполнения с каждым управляющим тросом согласован собственный исполнительный механизм.
В одном варианте выполнения каждый исполнительный механизм содержит приводной двигатель, предпочтительно электродвигатель, и/или направляющее колесо для управляющего троса.
В одном варианте выполнения управляющие тросы неподвижно закреплены в рабочей головке. Таким образом, в этом варианте выполнения управляющие тросы не могут вытягиваться из рабочей головки или снова втягиваться в нее.
В другом варианте выполнения верхний управляющий трос одной пары отклоняется на рабочей головке и проходит в качестве нижнего управляющего троса той же пары обратно к каркасу. В этом варианте выполнения на каркасе может быть предусмотрен общий исполнительный механизм для верхнего и нижнего управляющего троса пары.
В одном варианте выполнения каркас и, в частности, места каркаса, от которых отходят управляющие тросы, выполнены с возможностью перестановки по высоте. Для этого каркас может иметь, например, механическую, гидравлическую, пневматическую, магнитную или комбинированную систему, на основе которой весь каркас или части каркаса могут быть подняты и/или опущены. Подходящие механические системы включают в себя, например, тяговые тросы.
В одном варианте выполнения рабочая головка содержит или удерживает сопло для пригодного к шприцеванию строительного материала и предпочтительно шприцбетона, которое предпочтительно соединено с помощью трубопровода с источником материала. Это обеспечивает возможность строительства трехмерных стационарных объектов на рабочей поверхности посредством шприцевания бетона.
В одном варианте выполнения рабочая головка содержит подъемное приспособление для предварительно изготовленных конструктивных элементов. Это обеспечивает возможность предпочтительно автоматизированной или частично автоматизированной транспортировки предварительно изготовленных конструктивных элементов из находящегося вне радиуса действия рабочей головки склада, который в простейшем случае может быть образован свободной поверхностью или платформой, к месту предназначения на рабочей поверхности. Таким образом, обеспечивается возможность не только автоматизированного или частично автоматизированного строительства гомогенных структур, но также автоматизированного строительства гетерогенных структур.
В одном варианте выполнения подъемное приспособление содержит захватное приспособление и/или присасывающее приспособление. Присасывающее приспособление можно применять для транспортировки объектов с гладкой наружной поверхностью, таких как, например, плитка или стекло.
В одном варианте выполнения устройство служит для автоматизированного строительства стационарных структур на рабочей поверхности на основе информации о трехмерной форме этих структур, при этом управляющий блок управляет исполнительными механизмами на основе этой информации. Информация может приходить из массива данных управления, который может быть, например, BIM- или CAD-массивом. Массив данных управления может храниться в управляющем блоке или во внешнем вычислительном блоке. В названном последним случае устройство содержит блок связи, который обеспечивает возможность приема данных из внешнего вычислительного блока, либо без кабелей, либо с применением кабелей.
Что касается массива данных управления, то возможно использование так называемых цифровых моделей данных зданий для возведения и обработки зданий на основе устройства согласно изобретению. Такая цифровая модель данных здания может быть создана на основе так называемого моделирования строительной информации (BIM), и база данных содержит цифровую информацию о подлежащем возведению, соответственно, обработке здании. Такие модели данных здания или BIM-модели является читаемыми компьютером массивами данных или конгломератами данных и, возможно, обрабатывающими компьютерную программу блоками для обработки таких данных, в частности, их информации и характеристик, которые описывают здание и его релевантные свойства в виде цифровых данных. В частности, такие модели данных здания могут содержать CAD-данные для визуализации здания или, соответственно, его частей, а также другой релевантной информации о здании, например, графика его возведения или информацию логистики о необходимых вспомогательных средствах. Модель данных здания можно передавать в цифровом виде и тем самым предоставлять в распоряжение управляющего блока устройства.
В контексте данного изобретения в одном варианте выполнения предусмотрено, что управление работой тросового робота осуществляется на основе данных BIM-модели или, соответственно, модели данных здания. Данные могут храниться локально в устройстве или отзываться извне, например, с помощью LAN-соединения или без проводов, например, через интернет.
Поэтому изобретение относится также к системе, содержащей устройство согласно изобретению и внешний вычислительный блок, при этом внешний вычислительный блок и устройство согласно изобретению имеют соответствующий блок связи, с целью обеспечения возможности передачи данных из внешнего вычислительного блока в устройство согласно изобретению. Подходящие пути связи содержат, например, LAN и/или WWW.
В одном варианте выполнения предусмотрено измерительное приспособление, которое может распознавать структуры на рабочей поверхности и передавать информацию в управляющий блок или во внешний вычислительный блок. Измерительное приспособление может быть расположено на самом устройстве или вне его, с целью образования системы, содержащей устройство согласно изобретению и внешнее измерительное приспособление и, возможно, внешний вычислительный блок. На основе оценки данных измерительного приспособления можно распознавать прогресс строительства и/или выполнять контроль качества.
В одном варианте выполнения предусмотрен кран для образования системы, содержащей устройство согласно изобретению и кран и, возможно, дополнительно внешнее измерительное приспособление и/или внешний вычислительный блок. Кран может быть, например, башенным поворотным краном. При этом кран может действовать в качестве транспортирующего приспособления для транспортировки, например, материалов для источника строительного материала и/или конструктивных элементов для склада или для транспортировки конструктивных элементов на рабочую поверхность и/или на структуры.
В одном варианте выполнения предусмотрено, что система содержит датчик для контролирования прогресса строительства, который может быть расположен, например, на кране. Подходящие датчики содержат, например, ультразвуковые, радарные, инфракрасные или лазерные датчики. На основе таких датчиков может осуществляться контролирование прогресса строительства, при этом измерительные данные датчиков могут сравниваться с базой данных, например, из BIM-модели. Может быть предусмотрена модификация управляющих данных на основе сравнения, когда обнаруживается отклонение от заданного значения, которое должно быть компенсировано.
Кран может также иметь управляющий блок и блок связи, так что может приниматься информация из внешнего вычислительного блока.
Изобретение относится также к способу строительства стационарной структуры на рабочей поверхности с применением устройства согласно изобретению или системы согласно изобретению, при этом пригодный для шприцевания строительный материал из сопла рабочей головки наносится на рабочую поверхность или на существующие структуры на рабочей поверхности. Предпочтительно, строительство структур осуществляется методом свободной формовки, т.е. без применения опалубок. В качестве альтернативного решения, могут использоваться также опалубки.
В одном варианте выполнения пригодный для шприцевания строительный материал является шприцбетоном, и устройство или, соответственно, способ служат для строительства стационарных структур из бетона или содержащих бетон. В одном варианте выполнения способ является способом мокрого шприцевания. В качестве альтернативного решения, возможен способ сухого шприцевания.
В рамках способа согласно изобретению может быть предусмотрено, что управление движением рабочей головки и/или подачей пригодного для шприцевания строительного материала осуществляется на основе информации из массива управляющих данных. Движение рабочей головки вызывается за счет втягивания и выпускания управляющих тросов.
Дополнительно к этому, в рамках способа согласно изобретению может быть предусмотрено, что транспортировка предварительно изготовленных конструктивных элементов на рабочую поверхность или на рабочей поверхности осуществляется на основе информации из массива управляющих данных. При этом осуществляется управление подъемным приспособлением.
Другие подробности и преимущества изобретения следуют из приведенного ниже пояснения примера выполнения со ссылками на прилагаемые чертежи, на которых изображено:
фиг. 1 - устройство согласно изобретению;
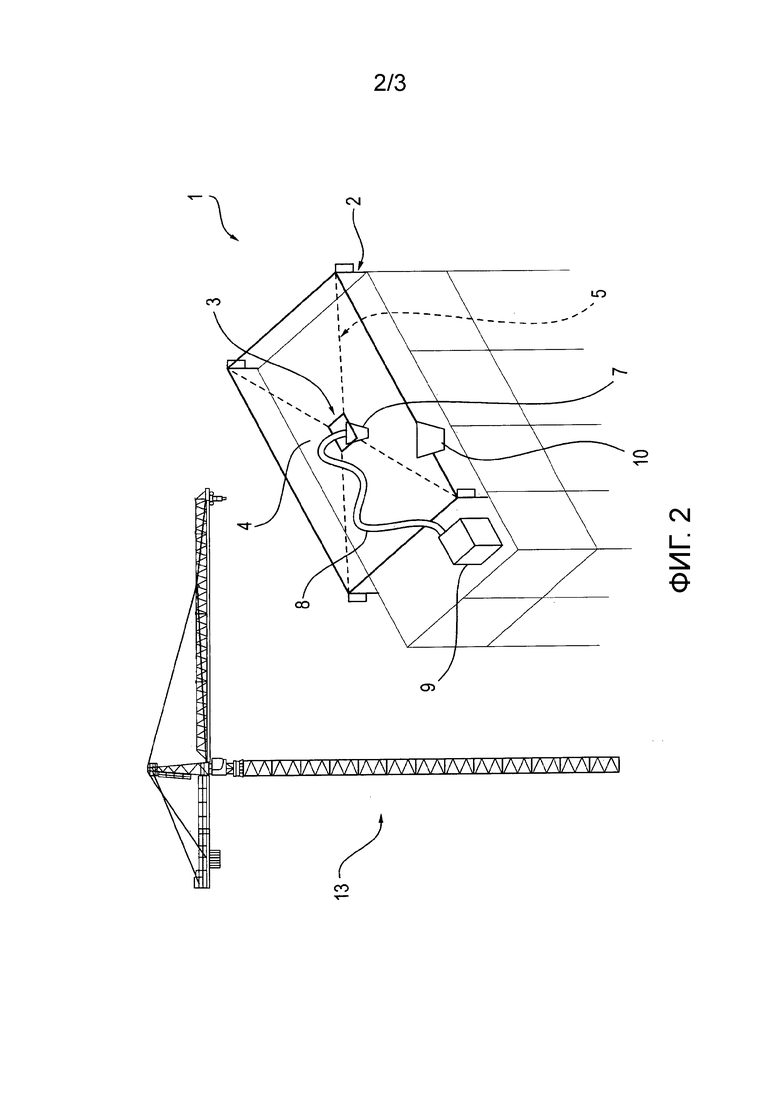
фиг. 2 - система согласно изобретению, содержащая устройство согласно фиг. 1 и башенный поворотный кран; и
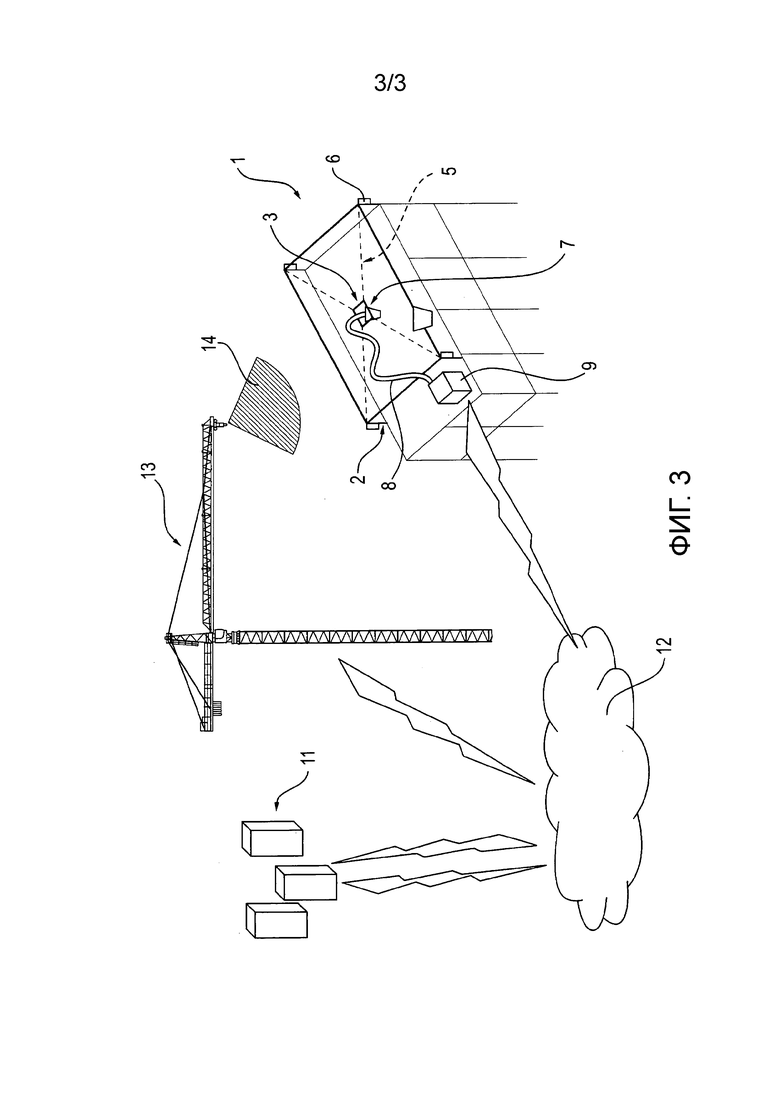
фиг. 3 - система согласно изобретению, содержащая устройство согласно фиг. 1, башенный поворотный кран и внешний вычислительный блок.
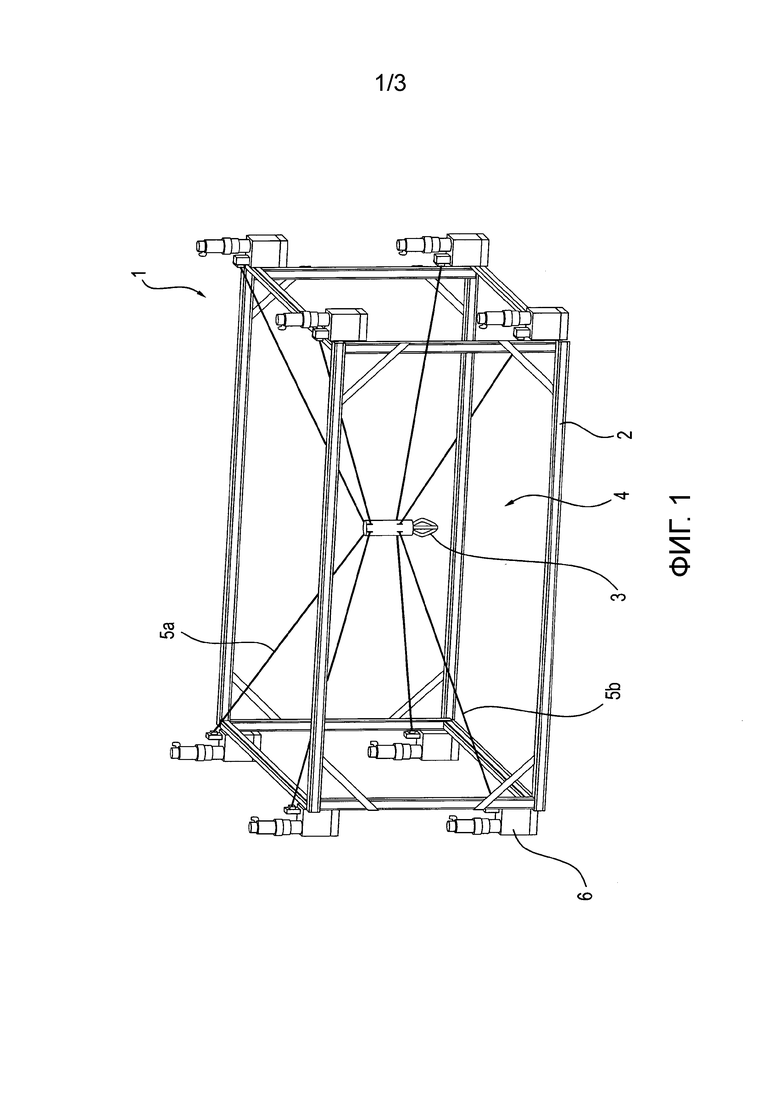
Устройство согласно изобретению обозначено в целом позицией 1. Оно содержит каркас 2 и рабочую головку 3, при этом каркас 2 окружает рабочую поверхность 4. Рабочая головка 3 удерживается на каркасе 2 с помощью четырех пар верхних управляющих тросов 5а и нижних управляющих тросов 5b и расположена над рабочей поверхностью 4. Верхние управляющие тросы 5а проходят от каркаса 2 над рабочей головкой 3, и нижние управляющие тросы 5b проходят под рабочей головкой 3. Все управляющие тросы 5 закреплены неподвижно в рабочей головке 3. Все управляющие тросы 5а и 5b являются волоконными канатами. В один из нижних управляющих тросов 5b интегрирован проводник тока и проводник передачи данных, с целью снабжения рабочей головки током и обеспечения беспрепятственного потока данных.
Управляющие тросы 5 опираются на каркас 2 так, что они могут выпускаться из каркаса 2 и втягиваться к каркасу 2, с целью изменения положения рабочей головки 3 над рабочей поверхностью 4. В зоне опоры всех управляющих тросов 5 для этого предусмотрены электродвигатели 6.
Не изображенный отдельно на фигурах управляющий блок управляет электродвигателями 6 на основе управляющей информации, с целью управления движениями рабочей головки 3 над рабочей поверхностью 4.
Каркас 2 расположен непрерывно вокруг рабочей поверхности 4 и имеет форму прямоугольника. С помощью не изображенной на фигурах системы перестановки по высоте он может весь подниматься.
Рабочая головка 3 удерживает сопло 7 для шприцбетона, при этом сопло соединено с помощью трубопровода 8 с источником 9 бетона. Кроме того, рабочая головка может иметь не изображенное на фигуре подъемное приспособление для транспортировки предварительно изготовленных конструктивных элементов со склада 10 к месту назначения на рабочей поверхности 4. При этом это может быть захватным приспособлением или присасывающим приспособлением.
Управляющая информация для управляющего блока приходит из массива управляющих данных, которые хранятся во внешнем вычислительном блоке 11. Внешний вычислительный блок 11 и устройство 1 согласно изобретению имеют каждое не изображенный на фигуре блок связи для обеспечения возможности передачи 12 управляющей информации массива управляющих данных из внешнего управляющего блока 11 в устройство согласно изобретению. При этом управляющая информация извлекается из модели BIM.
В одном варианте выполнения предусмотрено не изображенное на фигуре измерительное приспособление, которое может распознавать структуры на рабочей поверхности и передавать информацию в управляющий блок или по пути 12 передачи во внешний вычислительный блок 11.
Кроме того, предусмотрен башенный поворотный кран 13 для транспортировки материалов для источника 9 бетона и конструктивных элементов для склада 10. Кран 13 имеет также не изображенные блоки управления и связи для обеспечения возможности приема управляющей информации из внешнего вычислительного блока 11.
Устройство 1, внешний вычислительный блок 11 и кран 13 могут взаимодействовать в рамках автоматизированного или частично автоматизированного строительства трехмерных стационарных структур на рабочей поверхности 4 на основе управляющей информации из массива управляющих данных. При этом шприцбетон наносится свободно способом мокрого или сухого шприцевания на рабочую поверхность 4. Движение рабочей головки 3 и подача шприцбетона управляются на основе информации из массива управляющих данных. Движение рабочей головки 3 вызывается втягиванием или выпусканием управляющих тросов 5, при этом управляющий блок управляет электродвигателями 5 на основе информации из массива управляющих данных. Дополнительно к этому, за счет движения рабочей головки 3 и управления подъемным приспособлением может осуществляться транспортировка предварительно изготовленных конструктивных элементов из склада 10 к рабочей поверхности 4 или на рабочей поверхности 4.
Позицией 14 обозначено поле контролирования на кране, которое должно символизировать участок зоны измерения датчика, который расположен на кране и находится в соединении с внешним вычислительным блоком 11. На основе этого датчика контролируется ход строительства, и внешний вычислительный блок 11 выполнен так, что принимаемые от датчика измерительные данные сравниваются с базой данных из модели BIM. Если устанавливается отклонение от заданного значения, то управляющие данные для тросового робота модифицируются для компенсации отклонения.
Изобретение относится к устройству (1) для строительства стационарных структур на рабочей поверхности (4). Техническим результатом является создание устройства и системы для обеспечения возможности, по образцу технологии трехмерной печати, частичной автоматизации или автоматизации при строительстве стационарных объектов. Технический результат достигается тем, что устройство (1) для строительства стационарных структур на рабочей поверхности (4) имеет каркас (2), который расположен вокруг рабочей поверхности (4), при этом предусмотрена рабочая головка (3), которая с помощью нескольких управляющих тросов (5) удерживается на каркасе (2) и расположена над рабочей поверхностью (4), причём рабочая головка (3) содержит сопло (7) для пригодного к шприцеванию строительного материала, при этом сопло (7) с помощью трубопровода (8) соединено с источником (9) строительного материала, при этом предусмотрены верхние управляющие тросы (5а), которые проходят от каркаса (2) над рабочей головкой (3), при этом предусмотрены нижние управляющие тросы (5b), которые проходят от каркаса (2) под рабочей головкой (3), при этом все управляющие тросы (2) могут выпускаться из каркаса (2) и втягиваться к каркасу (2) для изменения положения рабочей головки (3), и при этом предусмотрен управляющий блок, который соединен с исполнительными механизмами (6) для выпускания и втягивания управляющих тросов (5) и предназначен для управления этими исполнительными механизмами (6) для изменения положения рабочей головки (3), при этом управляющий блок предназначен для автоматического или частично автоматического управления исполнительными механизмами (6) и тем самым положением рабочей головки (3) и/или подачей строительного материала через сопло (7) на основе управляющей информации из массива управляющих данных, при этом массив управляющих данных является массивом BIM- или CAD-данных, и при этом каркас (2) выполнен с возможностью перестановки по высоте, а также технический результат достигается системой и способом, содержащими такое устройство. 3 н. и 11 з.п. ф-лы, 3 ил.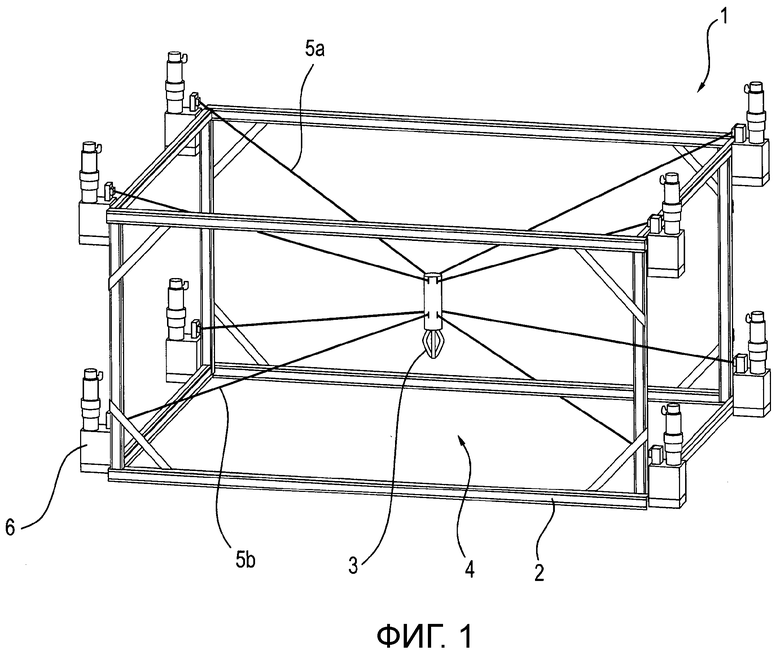
1. Устройство (1) для строительства стационарных структур на рабочей поверхности (4),
при этом устройство (1) имеет каркас (2), который расположен вокруг рабочей поверхности (4),
при этом предусмотрена рабочая головка (3), которая с помощью нескольких управляющих тросов (5) удерживается на каркасе (2) и расположена над рабочей поверхностью (4), причём рабочая головка (3) содержит сопло (7) для пригодного к шприцеванию строительного материала, предпочтительно шприцбетона, при этом сопло (7) с помощью трубопровода (8) соединено с источником (9) строительного материала
при этом предусмотрены верхние управляющие тросы (5а), которые проходят от каркаса (2) над рабочей головкой (3),
при этом предусмотрены нижние управляющие тросы (5b), которые проходят от каркаса (2) под рабочей головкой (3),
при этом все управляющие тросы (2) могут выпускаться из каркаса (2) и втягиваться к каркасу (2) для изменения положения рабочей головки (3), и
при этом предусмотрен управляющий блок, который соединен с исполнительными механизмами (6) для выпускания и втягивания управляющих тросов (5) и предназначен для управления этими исполнительными механизмами (6) для изменения положения рабочей головки (3),
при этом управляющий блок предназначен для автоматического или частично автоматического управления исполнительными механизмами (6) и тем самым положением рабочей головки (3) и/или подачей строительного материала через сопло (7) на основе управляющей информации из массива управляющих данных, при этом массив управляющих данных является массивом BIM- или CAD-данных, и
при этом каркас (2) выполнен с возможностью перестановки по высоте.
2. Устройство по п. 1, отличающееся тем, что количество верхних управляющих тросов (5а) соответствует количеству нижних управляющих тросов (5b), при этом соответствующие пары верхних и нижних управляющих тросов (5а, 5b) предпочтительно проходят друг над другом, и/или что предусмотрено по меньшей мере три верхних управляющих троса (5а) и/или по меньшей мере три нижних управляющих троса (5b), и/или по меньшей мере три пары управляющих тросов (5а, 5b), и/или что управляющие тросы (5) неподвижно закреплены в рабочей головке (3).
3. Устройство по п. 1 или 2, отличающееся тем, что с каждым управляющим тросом (5) согласован собственный исполнительный механизм (6), и/или что каждый исполнительный механизм (6) содержит приводной двигатель, предпочтительно электродвигатель, и/или направляющее колесо для управляющего троса (5).
4. Устройство по любому из пп. 1-3, отличающееся тем, что по меньшей мере один из управляющих тросов содержит проводник тока и/или проводник передачи данных.
5. Устройство по любому из пп. 1-4, отличающееся тем, что каркас (2) непрерывно окружает рабочую поверхность (4) или состоит из дискретно распределенных вокруг рабочей поверхности (4) элементов каркаса.
6. Устройство по любому из пп. 1-5, отличающееся тем, что рабочая головка (3) содержит подъемное приспособление для предварительно изготовленных конструктивных элементов, предпочтительно захватное приспособление и/или присасывающее приспособление.
7. Устройство по п. 6, отличающееся тем, что управляющий блок также предназначен для автоматического или частично автоматического управления подъёмным приспособлением на основе управляющей информации из массива управляющих данных.
8. Система, содержащая устройство (1) по любому из пп. 1-7 и внешний вычислительный блок (11) и/или расположенное на устройстве (1) или вне его измерительное приспособление, и/или кран (13).
9. Система по п. 8, отличающаяся тем, что устройство (1) и внешний вычислительный блок (11), и/или внешнее измерительное приспособление, и/или кран (13) имеют соответствующий блок связи для обеспечения возможности взаимной или односторонней передачи (12) данных.
10. Система по любому из пп. 8 или 9, отличающаяся тем, что измерительное приспособление предназначено для распознавания структур на рабочей поверхности (4) и обеспечения возможности передачи информации о внешнем виде структур в управляющий блок или внешний вычислительный блок (11).
11. Система по любому из пп. 8-10, отличающаяся тем, что кран (13) является башенным поворотным краном.
12. Способ автоматизированного или частично автоматизированного строительства стационарных структур на рабочей поверхности (4) с применением устройства (1) по любому из пп. 1-7 или системы по любому из пп. 8-11, при этом пригодный для шприцевания строительный материал подают предпочтительно свободно из расположенного или удерживаемого на рабочей головке (3) сопла (7) на рабочую поверхность (4) или на имеющиеся на рабочей поверхности (4) структуры, и при этом движение рабочей головки (3) вызывается за счет втягивания и выпускания управляющих тросов (5).
13. Способ по п. 12, отличающийся тем, что пригодный для шприцевания строительный материал является шприцбетоном, при этом способ предпочтительно является способом мокрого или сухого шприцевания.
14. Способ по любому из пп. 12 или 13, отличающийся тем, что управление движением рабочей головки (3) и выдачей пригодного для шприцевания строительного материала и/или транспортировкой предварительно изготовленных конструктивных элементов на рабочую поверхность или на рабочей поверхности осуществляют на основе информации из массива управляющих данных.
| US 2009066100 A1, 12.03.2009 | |||
| US 6826452 B1, 30.11.2004 | |||
| Способ газификации мелкозернистого топлива | 1949 |
|
SU79475A1 |
| US 2004146388 A1, 29.07.2004 | |||
| СПОСОБ СТРОИТЕЛЬСТВА КАРКАСНЫХ ЗДАНИЙ | 2005 |
|
RU2283401C1 |

