Настоящее изобретение относится к крану, в частности башенному поворотному крану, с закрепленным на подъемном тросе грузозахватным средством, приводными устройствами для движения нескольких крановых элементов и для перемещения грузозахватного средства, а также устройством управления для управления приводными устройствами таким образом, что грузозахватное средство перемещается вдоль пути перемещения, по меньшей мере, между двумя целевыми точками.
Для того чтобы была возможность перемещать грузовой крюк крана между двумя целевыми точками, как правило, различные приводные устройства должны приводиться в действие и управляться. Например, у башенного поворотного крана, у которого подъемный трос выходит из крановой тележки, которая может перемещаться по стреле крана, должен, как правило, в каждом случае приводиться в действие и управляться механизм поворота, при помощи которого может поворачиваться башня с предусмотренной на ней стрелой крана или стрела крана относительно башни вокруг вертикальной оси поворота, а также привод крановой тележки, при помощи которого крановая тележка может перемещаться вдоль стрелы крана, и подъемный механизм, при помощи которого подъемный трос может перемещаться, и тем самым грузовой крюк может подниматься и опускаться. Указанные приводные устройства приводятся в действие и управляются при этом, как правило, оператором крана через соответствующие органы управления, например, в виде джойстиков, перекидных переключателей или поворотных рукояток и тому подобного, что, как показывает практика, требует большого чутья и опыта, для того чтобы достигать целевых точек быстро и, тем не менее, плавно без больших маятниковых движений. Расстояние между целевыми точками должно проходиться при этом максимально быстро, в то время как остановка в соответствующей целевой точке должна осуществляться плавно.
Такое управление приводными устройствами крана утомительно ввиду необходимой концентрации для оператора крана, тем более что зачастую должны выполняться постоянно повторяющиеся пути перемещения и монотонные задачи, например, если при бетонировании подвешенный на крюке крана ковш для бетонирования должен многократно перемещаться вперед и назад между бетономешалкой, на которой ковш для бетонирования заполняется, и областью бетонирования, в которой ковш для бетонирования опорожняется. С другой стороны, при ослабевающей концентрации или же при недостаточном опыте с соответствующим типом крана доходит до больших маятниковых движений подвешенного груза и тем самым до соответствующего потенциала опасности.
Исходя из этого, в основе данного изобретения лежит задача создать улучшенный кран указанного вначале типа, который предотвращает недостатки уровня техники и совершенствует его предпочтительным образом. В частности, должна достигаться менее утомительная работа на кране с уменьшенным риском нежелательных маятниковых движений груза.
Согласно изобретению указанная задача решается с помощью крана согласно пункту 1 формулы изобретения. Предпочтительные варианты осуществления изобретения являются предметом зависимых пунктов формулы изобретения.
Таким образом, предлагается выполнять устройство управления согласно системе автопилота, которая грузозахватное средство крана может автоматически перемещать, по меньшей мере, между двумя целевыми точками. В устройстве управления реализован автоматический режим работы, в котором устройство управления без ручного манипулирования органами управления поста управления оператором машины перемещает грузовой крюк или грузозахватное средство между целевыми точками. Согласно изобретению устройство управления имеет модуль определения пути перемещения для определения желаемого пути перемещения, по меньшей мере, между двумя целевыми точками и автоматический модуль управления перемещением для автоматического перемещения грузозахватного средства вдоль найденного пути перемещения. С помощью указанного модуля определения пути перемещения может осуществляться интерполяция между двумя целевыми точками, или может производиться расчет промежуточных положений, которые более точно определяют путь перемещения между двумя целевыми точками. Модуль управления перемещением управляет затем на основе интерполированных или вычисленных промежуточных значений регуляторами приводов или приводными устройствами, для того чтобы грузозахватным средством достигать указанных промежуточных положений и целевых точек или автоматически проходить найденный путь перемещения.
Указанный автоматический режим работы устройства управления предотвращает преждевременное утомление оператора крана и облегчает в частности монотонные работы, такие как постоянное движение вперед и назад между двумя фиксированными целевыми точками. С другой стороны, благодаря автоматическому определению пути перемещения между целевыми точками и управлению приводными устройствами в зависимости от установленного таким образом пути перемещения могут предотвращаться нежелательные маятниковые движения подвешенного груза из-за неумелого манипулирования ручными органами управления или из-за плохо выбранного пути перемещения.
Определение пути перемещения между целевыми точками может осуществляться при этом принципиально по-разному. Например, указанный модуль определения пути перемещения может иметь модуль управления двух точек (Punkt-zu-Punkt - PTP) или PTP-модуль управления, который выполнен для того, чтобы точно находить две целевые точки, причем форма траектории между точками, тем не менее, задана не жестко.
Такой PTP-модуль управления может при этом содержать функцию сглаживания, при помощи которой путь перемещения определяется таким образом, что для оптимального по времени перемещения заданная целевая точка не точно достигается, а при достижении ее области сглаживания осуществляется отклонение к следующей точке.
В усовершенствовании изобретения указанная функция сглаживания PTP-модуля управления может быть выполнена при этом для асинхронной работы, так что сглаживание начинается, если последняя, приводимая в действие приводная ось или приводное устройство достигает сферы пространства вокруг указанной точки. Альтернативно функция сглаживания может быть также выполнена или настроена для синхронной работы, так что сглаживание начинается, как только ведущая ось перемещения или приводная ось входит в сферу пространства вокруг запрограммированной точки.
Однако альтернативно или дополнительно к указанному PTP-модулю управления модуль определения пути перемещения может также иметь модуль управления множества точек, который между двумя достигаемыми целевыми точками определяет множество промежуточных точек, предпочтительно таким образом, что указанные промежуточные точки образуют частую последовательность равноудаленных по времени точек. Достижение таких равноудаленных по времени промежуточных точек, которые расположены в частой последовательности, требует приблизительно одного и того же промежутка времени, так что может достигаться в целом гармоническое приведение в действие приводных устройств и тем самым гармоническое перемещение элементов крана.
Альтернативно или дополнительно к такому модулю управления множества точек определение пути перемещения может также осуществляться модулем управления траектории, который вычисляет непрерывную, математически заданную траекторию движения между целевыми точками. Такой модуль управления траектории может включать в себя при этом интерполятор, который в соответствии с заданной функцией или подфункцией траектории, например, в виде прямой, окружности или полинома вычисляет промежуточные значения на рассчитанной пространственной кривой и передает их на приводные устройства или их регуляторы приводов. Такой интерполятор может выполнять линейную интерполяцию и/или круговую интерполяцию и/или сплайн-интерполяцию и/или особые интерполяции, например, интерполяции кривой Безье или спиральные интерполяции, причем это может выполняться с или без сглаживания.
Программирование или определение прохождения траектории или пути перемещения может осуществляться в режиме онлайн или оффлайн.
При онлайн-программировании определение желаемого пути перемещения может производиться в частности устройством обучения, при помощи которого желаемые целевые и промежуточные точки желаемого пути перемещения достигаются посредством ручного манипулирования органами управления устройства управления или же посредством обращения с ручным программатором, причем устройство обучения сохраняет указанные целевые и промежуточные точки. Предпочтительно опытный оператор крана может при помощи панели управления перемещать кран или его грузовой крюк вдоль необходимого пути перемещения между конечными точками. Все достигнутые таким образом координаты или промежуточные точки могут сохраняться в системе управления. В автоматическом режиме работы устройство управления крана может затем автономно достигать всех сохраненных целевых и промежуточных точек.
Альтернативно или дополнительно к такому устройству обучения модуль определения пути перемещения может также иметь устройство воспроизведения для определения желаемого пути перемещения посредством ручного перемещения грузового крюка вдоль желаемого пути перемещения. Во время ручного направления грузового крюка вдоль желаемого пути перемещения регистрируются координаты или промежуточные точки, так что устройство управления крана может точно повторять соответствующие движения.
Альтернативно или дополнительно к онлайн-программированию необходимого пути перемещения могут также приниматься еще другие меры, например, онлайн-программирование заданных блоков программы или программирование с использованием датчиков.
Оффлайн-определение желаемого пути перемещения может в предпочтительном усовершенствовании изобретения осуществляться в частности посредством привязки модуля определения пути перемещения к внешнему центральному компьютеру, который обладает доступом к модели данных строения и на основе цифровых данных модели данных строения предоставляет целевые и/или промежуточные точки для определения пути перемещения. На основе предоставленных из модели данных строения целевых и/или промежуточных точек модуль определения пути перемещения может затем разъясненным ранее способом определять путь перемещения, например, посредством PTP-управления, управления множества точек или управления траектории.
В такой модели данных строения, которая обозначается также как BIM-модель (BIM - Building Information Model), содержатся цифровые данные о воздвигаемом или обрабатываемом строении, причем речь здесь идет в частности о комплексной модели, которая содержит, как правило, трехмерные проекты всех объектов, временной график, а также расходную смету. Такие модели данных строения или BIM-модели являются, как правило, машиночитаемыми файлами или блоками файлов и при необходимости обрабатывающими ячейками компьютерной программы для обработки таких данных в информацию и характеристику, которые описывают воздвигаемое или обрабатываемое строение и его существенные свойства в виде цифровых данных.
На основе предпочтительно трехмерных данных строения, которые могут иметься в виде САПР-данных, могут для производимых ходов крана определяться целевые точки, причем для этого может предпочтительно иметься модуль определения хода крана, который с одной стороны идентифицирует целевые точки для такого хода крана и их координаты, например, место подвоза бетономешалки и область опорожнения ковша для бетонирования для задачи бетонирования. Дополнительно могут затем для определения пути перемещения учитываться данные строения, которые воспроизводят геометрию строения на соответствующем этапе строительства, для того чтобы предотвращать столкновения с уже существующими контурами строения.
Если таким образом целевые точки и предотвращающие столкновения промежуточные точки идентифицированы для пути перемещения, то они могут предоставляться в распоряжение модулю определения пути перемещения, который затем на основе этих целевых и промежуточных точек определяет уже описанным способом путь перемещения.
Для определения пути перемещения могут также использоваться промежуточные точки, которые учитывают границы рабочего участка крана, например, для того чтобы предотвращать столкновения с другими кранами. Такие границы рабочего участка или задающие такие границы рабочего участка данные могут также получаться или предоставляться из указанной модели данных строения. Альтернативно или дополнительно возможен также ручной ввод таких границ рабочего участка непосредственно на кране, которые могут также учитываться в том случае, если желаемый путь перемещения для автоматизированного хода определяется, и для этого используются промежуточные точки. Предпочтительно такие границы рабочего участка могут также учитываться динамически, в частности если соответствующие цифровые данные для границ рабочего участка предоставляются из модели данных строения или BIM-модели, которая учитывает продвижение строительных работах и возникающие изменения на различных этапах строительства.
Автоматический модуль управления перемещением устройства управления крана может работать принципиально по-разному, причем модуль управления перемещением может быть выполнен в частности для автономной работы в том отношении, что скорости перемещения и/или ускорения и соответствующие управляющие сигналы для приводных устройств не должны соответствовать скоростям или ускорениям перемещения, которые были заданы, например, во время процесса обучения или при программировании воспроизведения. Модуль управления перемещением может определять скорости и/или ускорения перемещения приводов автономно, в частности в том отношении, что с одной стороны достигаются высокие скорости перемещения, и используется мощность приводных устройств, а с другой стороны, достигается, тем не менее, плавное и без маятниковых движений достижение целевых точек.
В частности, указанный модуль управления перемещением может быть связан с устройством гашения маятниковых движений и/или учитывать предписания устройства гашения маятниковых движений. Такие устройства гашения маятниковых движений для кранов известны принципиально в различных исполнениях, например, реализованных за счет управления приводами механизма поворота, изменения вылета стрелы и крановой тележки в зависимости от определенных сигналов датчиков, например сигналов датчика наклона и/или сигналов гироскопа. Например, тексты DE 20 2008 018 260 U1 или DE 10 2009 032 270 A1 раскрывают известные гашения маятниковых движений груза на кранах, на предмет которых в этом отношении, то есть в отношении исполнения устройства гашения маятниковых движений, делается прямая ссылка.
В усовершенствовании изобретения модуль управления перемещением может учитывать для гашения маятниковых движений в частности угол отклонения или наклонную тягу грузового крюка крана относительно вертикали, которая может проходить через крановую тележку или точку подвеса подъемного троса. Соответствующее устройство регистрации для регистрации отклонения грузозахватного средства относительно вертикали может быть выполнено, например, для оптической работы и иметь дающую изображение сенсорную технику, например, камеру, которая смотрит с точки подвеса подъемного троса, например с крановой тележки, по существу вертикально вниз. Устройство оценки изображения может на предоставленном дающей изображение сенсорной техникой изображении идентифицировать крюк крана и определять его эксцентриситет или его сдвиг из центра изображения, который является мерой отклонения крюка крана относительно вертикали и характеризует тем самым маятниковые движения груза.
Указанный модуль управления перемещением может учитывать найденное таким образом отклонение грузового крюка и управлять приводными устройствами и/или определять их ускорения и скорости таким образом, что отклонения грузового крюка относительно вертикали минимизируются или не превышают определенный уровень.
Предпочтительно датчики положения могут быть выполнены для того, чтобы регистрировать груз относительно фиксированной мировой системы координат, и/или устройство управления перемещением может быть выполнено для того, чтобы позиционировать груз относительно фиксированной мировой системы координат.
Предпочтительно может предусматриваться устройство управления, которое позиционирует груз относительно фиксированной мировой системы координат или фундамента крана и таким образом не зависит непосредственно от колебаний конструкции крана и положения крана. Благодаря такому устройству управления положение груза отвязывается от колебаний крана, причем груз направляется не напрямую относительно крана, а относительно фиксированной мировой системы координат или фундамента крана.
В частности, колебания конструкции крана или его структурных элементов могут учитываться в устройстве управления и гаситься характером движений. Это в свою очередь оказывает сохраняющее воздействие на стальную конструкцию, которая вследствие этого меньше нагружается.
Благодаря регистрации положения груза может при этом также реализовываться регулировка наклонной тяги, которая устраняет или, по меньшей мере, сокращает статическую деформацию из-за подвешенного груза. Для того чтобы динамику колебаний сокращать или даже изначально не допускать, устройство гашения маятниковых движений может быть выполнено для того, чтобы корректировать механизм поворота или механизм крановой тележки таким образом, что трос находится по возможности всегда в вертикальной ориентации относительно груза, даже если кран наклоняется ввиду увеличения момента груза все больше вперед. Например, при подъеме груза с земли может учитываться движение ныряния крана вследствие его деформации под нагрузкой, и механизм крановой тележки с учетом зарегистрированного положения груза может перемещаться следом таким образом или при упреждающей оценке деформации ныряния позиционироваться таким образом, что подъемный трос при возникающей деформации крана находится в вертикальной ориентации над грузом. Максимальная статическая деформация возникает при этом в точке, в которой груз покидает землю. В этом случае регулировка наклонной тяги больше не требуется. Соответственно может альтернативно или дополнительно также механизм поворота с учетом зарегистрированного положения груза перемещаться следом таким образом и/или при упреждающей оценке поперечной деформации позиционироваться таким образом, что подъемный трос при возникающей деформации крана находится в вертикальной ориентации над грузом.
Такая регулировка наклонной тяги может в более поздний момент времени снова активироваться оператором, который может вследствие этого использовать кран в качестве манипулятора. Таким образом, он может позиционировать груз только посредством нажатия и/или волочения. Регулировка наклонной тяги пытается при этом откликаться на отклонение, которое вызывается оператором. Вследствие этого может реализовываться управление манипулятора.
В частности, модуль управления перемещением может при гасящих маятниковые движения мерах учитывать не только прямое маятниковое движение троса как таковое, но и динамику стальной конструкции крана и его силовых передач. Кран не воспринимается больше как неподвижное жесткое тело, приводные движения приводных устройств преобразовываются прямо и идентично, то есть 1:1, в движения точки подвеса подъемного троса. Вместо этого устройство гашения маятниковых движений рассматривает кран как нежесткую структуру, которая в своих стальных конструктивных элементах, как например решетке башни, и силовых передачах обнаруживает упругости и гибкости при ускорениях, и учитывает эту динамику структурных элементов крана при гасящем маятниковые движения воздействии на управление приводными устройствами.
Предпочтительно устройство гашения маятниковых движений может включать в себя средства определения для определения динамических деформаций и смещений структурных элементов конструкции под динамическими нагрузками, причем компонент управления устройства гашения маятниковых движений, который оказывает гасящее маятниковые движения воздействие на управление приводными устройствами, выполнен для того, чтобы при оказании воздействия на управление приводными устройствами учитывать найденные динамические деформации структурных элементов конструкции крана.
Устройство гашения маятниковых движений рассматривает таким образом конструкцию крана или машины предпочтительно не как жесткую, так сказать, бесконечно твердую структуру, а исходит из упруго деформируемой и/или гибкой и/или относительно нежесткой структуры, которая - в дополнение к осям установочных движений машины, таким как ось изменения вылета стрелы крана или ось поворота башни - допускает смещения или изменения положения из-за деформаций структурных элементов конструкции.
Принятие во внимание подвижности конструкции машины вследствие структурных деформаций под действием груза или под динамическими нагрузками имеет значение именно при вытянутых, длинных и заведомо исчерпавших себя по статическим и динамическим краевым условиям - с учетом необходимых запасов прочности - структурах, таких как башенные поворотные краны, так как в этом случае благодаря деформациям структурных элементов конструкции добавляются ощутимые составляющие движений, например для стрелы крана и тем самым для положения грузового крюка. Для того чтобы была возможность лучше бороться с причинами маятниковых движений, гашение маятниковых движений учитывает такие деформации и смещения конструкции машины под динамическими нагрузками.
Таким образом, могут достигаться существенные преимущества:
Прежде всего, сокращается динамика колебаний структурных элементов конструкции благодаря регулировочной характеристике устройства управления. При этом благодаря ходовой характеристике колебания активно гасятся или благодаря регулировочной характеристике изначально вовсе не возбуждаются.
Равным образом стальная конструкция бережется и меньше нагружается. В частности, ударные нагрузки сокращаются благодаря регулировочной характеристике.
Далее благодаря этому способу может задаваться воздействие ходовой характеристики.
Благодаря знанию динамики конструкции и регулировочной характеристике могут уменьшаться и гаситься в частности колебания ныряния. Вследствие этого груз ведет себя более спокойно и больше не колеблется впоследствии в положении покоя вперед и назад.
Вышеуказанные упругие деформации и смещения структурных элементов конструкции и силовых передач и устанавливающиеся вследствие этого собственные движения могут определяться принципиально по-разному. В усовершенствовании изобретения указанные средства определения могут включать в себя устройство оценки, которое деформации и смещения конструкции машины под динамическими нагрузками, которые возникают в зависимости от введенных на посте управления команд управления и/или в зависимости от найденных управляющих действий приводных устройств и/или в зависимости от найденных профилей скорости и/или ускорения приводных устройств, оценивает с учетом характеризующих конструкцию крана имеющихся условий.
Такое устройство оценки может обращаться, например, к модели данных, в которой структурные размеры крана, такие как высота башни, длина стрелы крана, изгибные жесткости, моменты инерции площадей и тому подобное сохранены и/или связаны друг с другом, для того чтобы затем на основе конкретной ситуации нагрузки, то есть на основе веса подвешенного на грузовом крюке груза и текущего вылета стрелы, оценивать, какие динамические эффекты, то есть деформации в стальной конструкции и в силовых передачах, возникают для найденного приведения в действие приводных устройств. В зависимости от оцененного таким образом динамического эффекта устройство гашения маятниковых движений может затем вмешиваться в управление приводными устройствами и оказывать воздействие на регулирующие переменные регуляторов приводов приводных устройств, для того чтобы предотвращать или сокращать маятниковые движения грузового крюка и подъемного троса.
В частности, устройство определения для определения таких структурных деформаций может иметь блок вычислений, который эти структурные деформации и проистекающие из них смещения структурных элементов конструкции вычисляет на основе сохраненной вычислительной модели в зависимости от введенных на посту управления команд управления. Такая модель может быть выполнена аналогично модели конечных элементов или быть моделью конечных элементов, причем предпочтительно используется, тем не менее, существенно упрощенная по сравнению с моделью конечных элементов модель, которая может определяться, например, опытным путем посредством регистрации структурных деформаций при определенных командах управления и/или состояниях нагрузки на настоящем кране или настоящей машине. Такая вычислительная модель может работать, например, с таблицами, в которых с определенными командами управления согласованы определенные деформации, причем промежуточные значения команд управления могут при помощи устройства интерполяции пересчитываться в соответствующие деформации.
Альтернативно или дополнительно к оценке или вычислению упругих деформаций и динамических смещений структурных элементов конструкции устройство гашения маятниковых движений может включать в себя также подходящую сенсорную технику, при помощи которой регистрируются такие упругие деформации и смещения структурных элементов конструкции под динамическими нагрузками. Такая сенсорная техника может включать в себя, например, датчики деформации, такие как тензометрические датчики на стальной конструкции крана, например, на ферменных конструкциях башни и/или стрелы крана. Альтернативно или дополнительно могут быть предусмотрены датчики ускорения и/или скорости, для того чтобы регистрировать определенные смещения структурных элементов конструкции, как например движения ныряния конца стрелы крана и/или крутящие динамические эффекты на стреле крана.
Альтернативно или дополнительно могут быть также предусмотрены датчики наклона или гироскопы, например, на башне, в частности на ее верхнем участке, на котором установлена стрела крана, для того чтобы регистрировать динамику башни. Например, прерывистые движения подъема приводят к движениям ныряния стрелы крана, которые сопровождаются изгибными движениями башни, причем резонирование башни приводит в свою очередь к колебаниям ныряния стрелы крана, что сопровождается соответствующими движениями грузового крюка. Альтернативно или дополнительно могут быть также с силовыми передачами согласованы датчики движения и/или ускорения, для того чтобы была возможность регистрировать динамику силовых передач. Например, могут быть с отклоняющими роликами крановой тележки для подъемного троса и/или с отклоняющими роликами для оттяжного троса стрелы с изменяемым вылетом согласованы датчики вращения, для того чтобы была возможность регистрировать действительную скорость троса в актуальной точке.
Предпочтительно также с самими приводными устройствами согласованы подходящие датчики движения и/или скорости и/или ускорения, для того чтобы приводные движения приводных устройств была возможность соответствующим образом регистрировать и связывать с оцененными и/или зарегистрированными деформациями структурных элементов конструкции, как например стальной конструкции, и в силовых передачах.
Альтернативно или дополнительно к такому принятию во внимание предписаний устройства гашения маятниковых движений модулем управления перемещением гасящие маятниковые движения меры могут также учитываться уже при планировании или определении желаемого пути перемещения. Например, модуль определения пути перемещения может скруглять изломы пути перемещения или широко устанавливать радиусы кривой перемещения и/или предотвращать извилистые линии.
Изобретение разъясняется в дальнейшем более подробно при помощи предпочтительных примеров осуществления и приложенного чертежа. На чертеже показаны:
фиг. 1 - схематичное изображение башенного поворотного крана, грузовой крюк которого должен перемещаться вперед и назад между двумя целевыми точками в виде станции подвоза бетона и поля бетонирования;
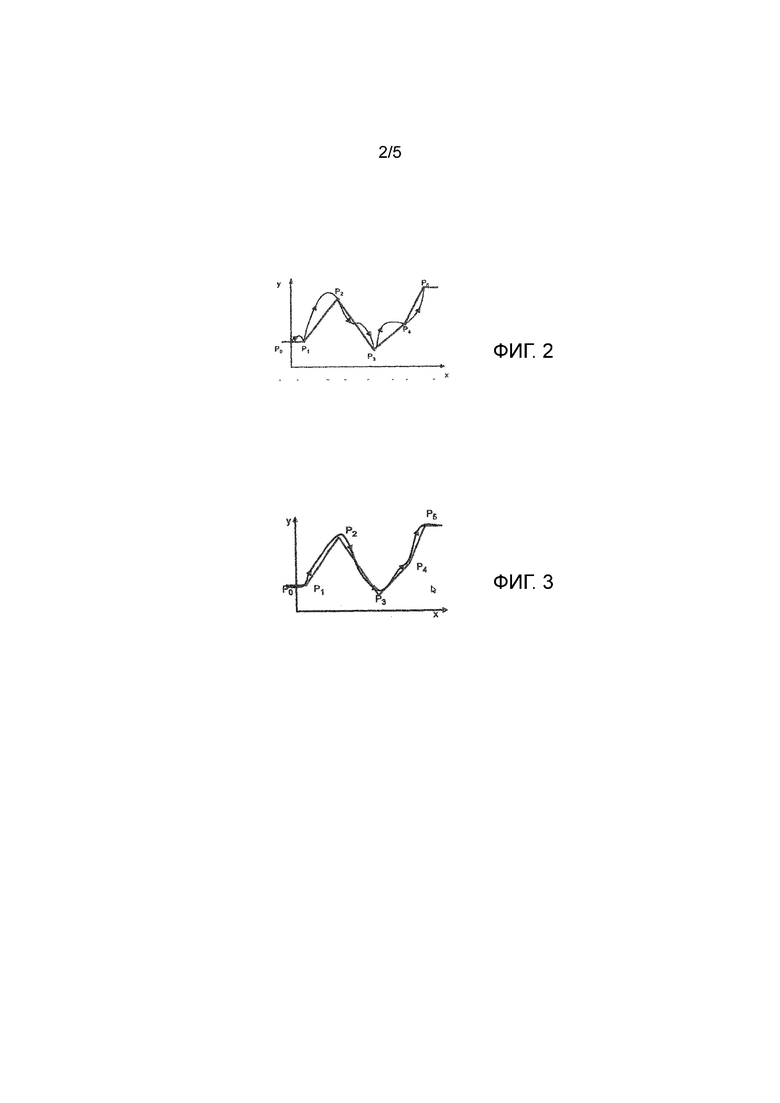
фиг. 2 - схематичная диаграмма для пояснения принципа работы PTP-модуля управления, который определяет путь перемещения согласно управлению двух точек;
фиг. 3 - схематичная диаграмма для пояснения принципа работы модуля управления множества точек, который определяет путь перемещения согласно управлению множества точек;
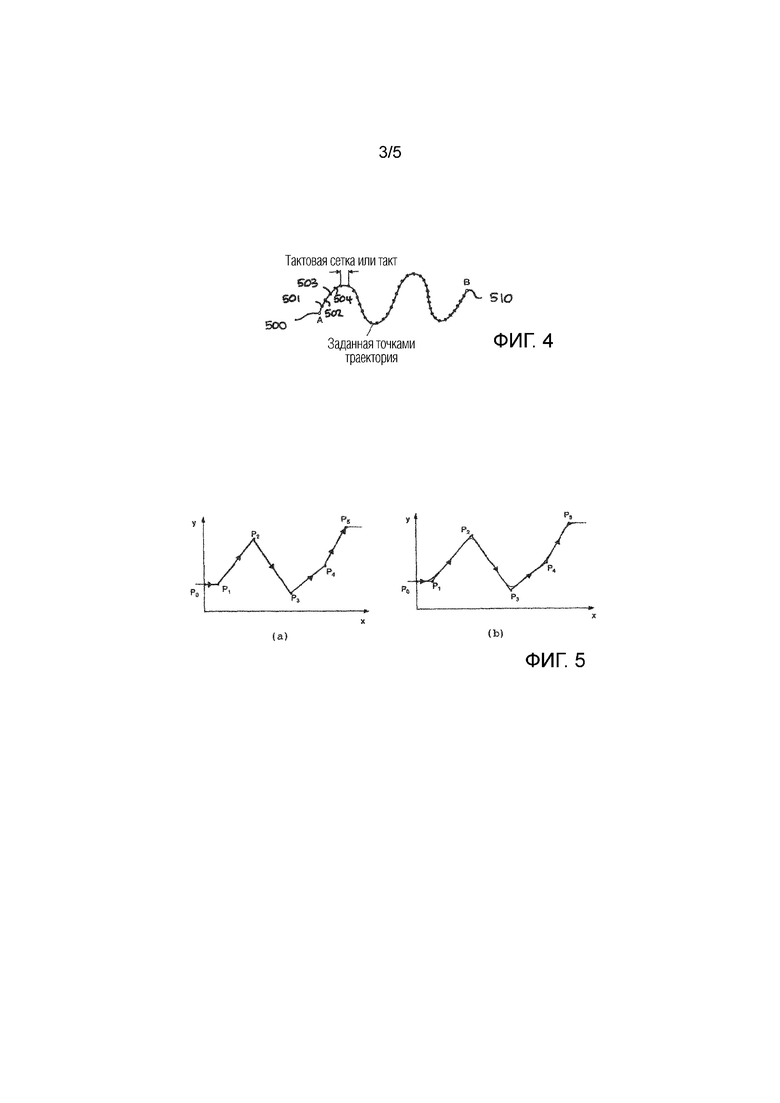
фиг. 4 - созданная посредством управления множества точек траектория перемещения, которая определяется частой последовательностью эквидистантных по времени точек;
фиг. 5 - две схематичные диаграммы для пояснения принципа работы модуля управления траектории, который определяет путь перемещения как непрерывную, математически рассчитанную траекторию движения, причем частичная диаграмма (a) показывает управлении траектории без сглаживания, а частичная диаграмма (b) показывает управлении траектории со сглаживанием;
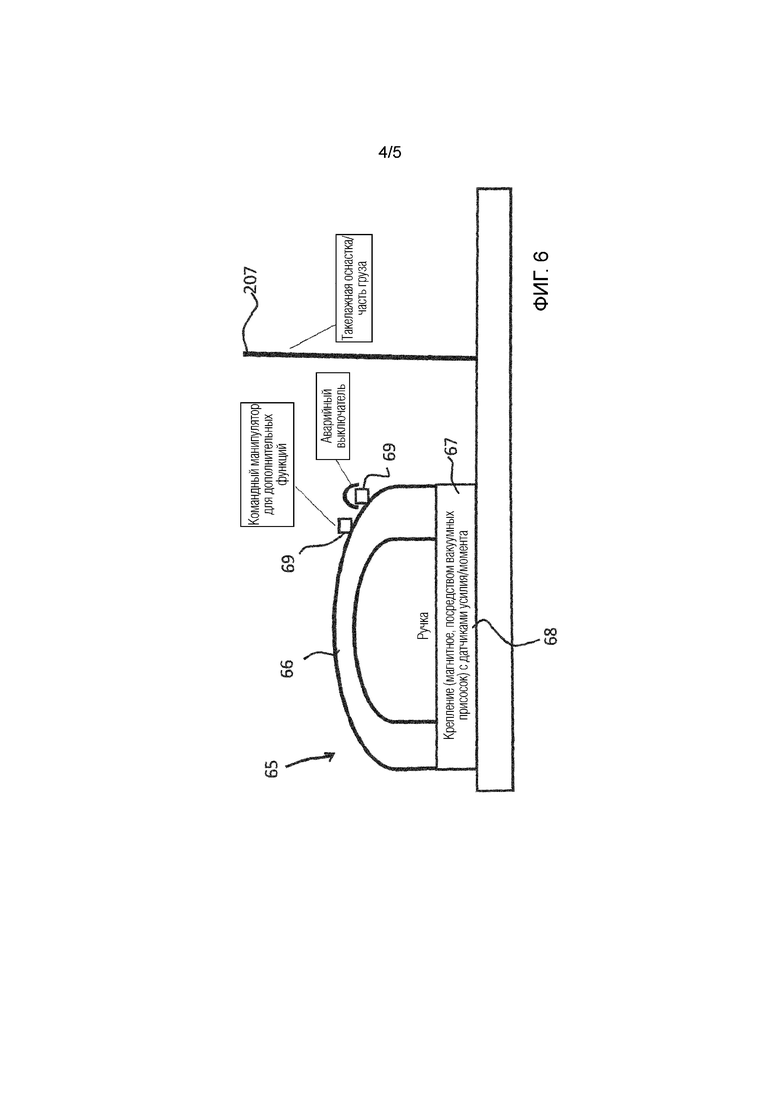
фиг. 6 - схематичное изображение модуля управления, который может присоединяться к грузовому крюку или закрепленному на нем конструктивному элементу, для того чтобы грузовой крюк была возможность точно юстировать в целевой точке или для программирования воспроизведения или обучения вручную перемещать вдоль желаемой траектории; и
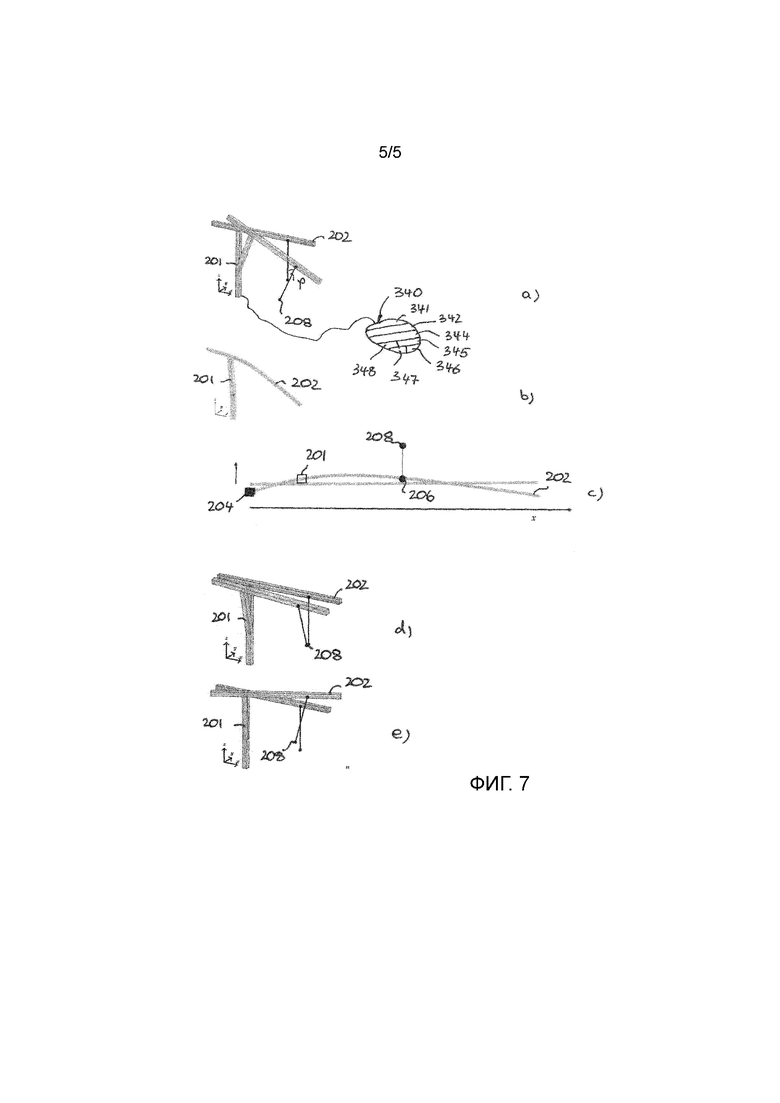
фиг. 7 - схематичное изображений деформаций и форм колебаний башенного поворотного крана под нагрузкой и их гашение или предотвращение посредством регулировки наклонной тяги, причем частичный вид a) показывает деформацию ныряния башенного поворотного крана под нагрузкой и связанную с ней наклонную тягу подъемного троса, частичные виды b) и c) показывают поперечную деформацию башенного поворотного крана на изображении в перспективе, а также на виде сверху, и частичные виды d) и e) показывают связанную с такими поперечными деформациями наклонную тягу подъемного троса.
Как показывает фиг. 1, кран может быть выполнен в виде башенного поворотного крана. Показанный на фиг. 1 башенный поворотный кран может иметь, например, по существу известную башню 201, которая удерживает стрелу 202 крана, которая уравновешивается противовесной стрелой 203, на которой предусмотрен противовес 204. Указанная стрела 202 крана может вместе с противовесной стрелой 203 поворачиваться механизмом поворота вокруг вертикальной оси 205 поворота, которая может быть коаксиальной к оси башни. По стреле 202 крана может при помощи привода тележки перемещаться крановая ходовая тележка 206, причем из крановой тележки 206 выходит подъемный трос 207, на котором закреплен грузовой крюк 208.
Как также показывает фиг. 1, кран 2 может иметь при этом электронное устройство 3 управления, которое может включать в себя, например, расположенное на самом кране управляющее вычислительное устройство. Указанное устройство 3 управления может управлять при этом различными исполнительными органами, гидравлическими системами, электродвигателями, приводными устройствами и другими рабочими агрегатами на соответствующей строительной машине. Ими могут быть, например, у показанного крана его подъемный механизм, его механизм поворота, его привод крановой тележки, его - имеющийся при необходимости - привод изменения вылета стрелы крана или тому подобное.
Указанное электронное устройство 3 управления может при этом сообщаться с терминалом 4, который может быть расположен на посте управления или в кабине оператора и может иметь, например, форму планшета с сенсорным экраном и/или джойстика, так что с одной стороны различные данные могут отображаться устройством 3 управления на терминале 4, а с другой стороны команды управления могут вводиться через терминал 4 в устройство 3 управления.
Указанное устройство 3 управления крана 1 может быть выполнено в частности для того, чтобы управлять указанными приводными устройствами подъемного механизма, крановой тележки и механизма поворота также в том случае, если грузовой крюк 208 и/или установленный на нем конструктивный элемент, как например ковш для бетонирования, манипулируется оператором машины вручную при помощи модуля 65 ручного управления с рукояткой 66, который показан на фиг. 6, то есть нажимается или тянется и/или поворачивается им вручную в некотором направлении или это пробуется, для того чтобы, например, при бетонировании делать возможной ручную тонкую настройку положения грузового крюка и тем самым ковша для бетонирования.
Для этого кран 1 может иметь устройство 60 регистрации, которое регистрирует наклонную тягу подъемного троса 207 и/или отклонения грузового крюка 208 относительно вертикали 61, которая проходит через точку подвеса грузового крюка 208, то есть через крановую тележку 206.
Предусмотренные для этого средства 62 определения устройства 60 регистрации могут работать, например, оптически, для того чтобы определять указанное отклонение. В частности, на крановой тележке 206 может быть смонтирована камера 63 или другая дающая изображение сенсорная техника, которая смотрит от крановой тележки 206 вертикально вниз, так что при неотклоненном грузовом крюке 208 его графическое отображение находится в центре предоставленного камерой 63 изображения. Если все же грузовой крюк 208 отклоняется относительно вертикали 61, например, благодаря ручному нажатию или тяговому усилию на грузовом крюке 208 или показанном на фиг. 9 ковше 50 для бетонирования, графическое отображение грузового крюка 208 смещается из центра изображения с камеры, что может определяться устройством 64 оценки изображения.
В зависимости от зарегистрированного отклонения относительно вертикали 61, в частности учитывая направление и величину отклонения, устройство 3 управления может управлять приводом механизма поворота и приводом крановой тележки, для того чтобы снова приводить крановую тележку 206 в более-менее точное положение над грузовым крюком 208, то есть устройство 3 управления управляет приводными устройствами крана 1 таким образом, что наклонная тяга или зарегистрированное отклонение максимально компенсируется. Вследствие этого может достигаться интуитивное, простое управление и тонкая настройка положения грузового крюка и установленного на нем груза.
Альтернативно или дополнительно указанное устройство 60 регистрации может включать в себя также указанный модуль 65 управления, который может быть выполнен мобильным и с возможностью присоединения к грузовому крюку 208 и/или установленному на нем грузу. Как показывает фиг. 6, такой модуль 65 ручного управления может включать в себя, например, рукоятку 66, которая при помощи подходящих средств 67 фиксации может предпочтительно разъемно закрепляться на грузозахватном средстве 208 и/или установленном на нем конструктивном элементе, как например ковше для бетонирования. Указанные средства 67 фиксации могут включать в себя, например, магнитные держатели, вакуумные присоски, стопорные фиксаторы, фиксаторы с байонетным затвором или тому подобное.
С указанной рукояткой 66 могут быть согласованы датчики 68 усилия и/или момента и при необходимости при возможном подвижном расположении или исполнении рукоятки 66 также датчики движения, при помощи которых оказанные на рукоятку 66 усилия и/или моменты и/или движения могут регистрироваться. Согласованная с рукояткой 66 сенсорная техника выполнена при этом предпочтительно таким образом, что усилия и/или моменты и/или движения могут регистрироваться в отношении своего направления действия и/или величины по модулю, см. фиг. 6.
На основе оказанных на рукоятке 66 манипуляционных усилий и/или моментов и/или движений, которые регистрируются устройством 60 регистрации, устройство 3 управления может управлять приводными устройствами крана 1 таким образом, что зарегистрированные ручные манипуляции преобразовываются в моторизованные установочные движения крана.
Ставшее таким образом возможным ручное управление ковшом для бетонирования или грузозахватным средством 208 позволяет с одной стороны еще раз точно дополнительно юстировать автоматически достигнутые целевые положения. С другой стороны, оно делает также возможным определение желаемого пути перемещения между двумя целевыми точками согласно управлению воспроизведения.
Для того чтобы была возможность выполнять автоматизированные ходы крана, например, для того чтобы была возможность автоматически перемещаться вперед и назад между станцией подвоза бетона и поверхностью бетонирования, устройство 3 управления включает в себя модуль 300 определения пути перемещения для определения желаемого пути перемещения, по меньшей мере, между двумя целевыми точками, а также автоматический модуль 310 управления перемещением для автоматического перемещения грузозахватного средства вдоль найденного пути перемещения посредством соответствующего управления приводными устройствами крана 200.
Для того чтобы делать возможными различные режимы работы, указанный модуль 300 определения пути перемещения охватывает различные рабочие режимы и имеет соответствующие модули, в частности модуль 301 управления двух точек или PTP, модуль 302 управления множества точек и модуль 303 управления траектории, см. фиг. 1.
Такой PTP-модуль 301 управления может включать в себя при этом функцию сглаживания, при помощи которой путь перемещения определяется таким образом, что для оптимального по времени перемещения заданная целевая точка достигается не точно, а при достижении ее области сглаживания осуществляется отклонение к следующей точке, см. фиг. 2.
В усовершенствовании изобретения указанная функция сглаживания PTP-модуля 301 управления может быть выполнена при этом для асинхронной работы, так что сглаживание начинается, если последняя, приводимая в действие приводная ось или приводное устройство достигает сферы пространства вокруг указанной точки. Альтернативно функция сглаживания может быть также выполнена или настроена для синхронной работы, так что сглаживание начинается, как только ведущая ось перемещения или приводная ось входит в сферу пространства вокруг запрограммированной точки.
Однако альтернативно или дополнительно к указанному PTP-модулю 301 управления модуль 300 определения пути перемещения может также иметь модуль 302 управления множества точек, см. фиг. 3, который между двумя достигаемыми целевыми точками 500, 510 определяет множество промежуточных точек 501, 502, 503, 504...n, предпочтительно таким образом, что указанные промежуточные точки 501, 502, 503, 504...n образуют частую последовательность равноудаленных по времени точек, см. фиг. 4. Достижение таких равноудаленных по времени промежуточных точек 501, 502, 503, 504...n, которые расположены в частой последовательности, требует приблизительно одного и того же промежутка времени, так что может достигаться в целом гармоническое приведение в действие приводных устройств и тем самым гармоническое перемещение элементов крана.
Альтернативно или дополнительно к такому модулю 302 управления множества точек определение пути перемещения может также осуществляться модулем 303 управления траектории, который вычисляет непрерывную, математически заданную траекторию движения между целевыми точками, см. фиг. 5. Такой модуль управления траектории может включать в себя при этом интерполятор, который в соответствии с заданной функцией или подфункцией траектории, например, в виде прямой, окружности или полинома вычисляет промежуточные значения на рассчитанной пространственной кривой и передает их на приводные устройства или их регуляторы приводов. Такой интерполятор может выполнять линейную интерполяцию и/или круговую интерполяцию и/или сплайн-интерполяцию и/или особые интерполяции, например, интерполяции кривой Безье или спиральные интерполяции, причем это может выполняться с или без сглаживания. Фиг. 5a показывает траекторию без сглаживания, а фиг. 5b траекторию со сглаживанием.
Программирование или определение прохождения траектории или пути перемещения может осуществляться в режиме онлайн или оффлайн.
При онлайн-программировании определение желаемого пути перемещения может производиться в частности устройством 320 обучения, при помощи которого желаемые целевые и промежуточные точки желаемого пути перемещения достигаются посредством ручного манипулирования органами управления устройства управления или же посредством обращения с ручным программатором, причем устройство 320 обучения сохраняет указанные целевые и промежуточные точки. Предпочтительно опытный оператор крана может при помощи панели управления перемещать кран 2 или его грузовой крюк 208 вдоль необходимого пути перемещения между конечными точками. Все достигнутые таким образом координаты или промежуточные точки могут сохраняться в системе 3 управления. В автоматическом режиме работы устройство 3 управления крана 2 может затем автономно достигать всех сохраненных целевых и промежуточных точек.
Альтернативно или дополнительно к такому устройству 320 обучения модуль 300 определения пути перемещения может также иметь устройство 330 воспроизведения для определения желаемого пути перемещения посредством ручного перемещения грузового крюка вдоль желаемого пути перемещения. Во время ручного направления грузового крюка 208 вдоль желаемого пути перемещения, что может осуществляться, например, при помощи модуля 65 ручного управления, см. фиг. 6, регистрируются координаты или промежуточные точки, так что устройство 3 управления крана 2 может точно повторять соответствующие движения.
Автоматический модуль 310 управления перемещением может предпочтительно учитывать предписания устройства 340 гашения маятниковых движений, причем указанное устройство 340 гашения маятниковых движений может предпочтительно использовать сигналы вышеуказанного устройства 60 регистрации, которое регистрирует отклонение грузового крюка 208 относительно вертикали 61.
Как показывает фиг. 1 далее, устройство 3 управления может быть связано с внешним, отдельным центральным компьютером 400, который может обладать доступом к модели данных строения в смысле BIM-модели и предоставлять цифровые данные из этой модели данных строения устройству 3 управления. Разъясненным выше образом эти цифровые данные из модели данных строения могут использоваться в частности для того, чтобы предоставлять для определения желаемого пути перемещения целевые и промежуточные точки, которые данные строения могут динамически учитывать на различных этапах и в границах рабочего участка.
Указанное устройство 3 управления крана 1 может быть выполнено в частности для того, чтобы управлять указанными приводными устройствами подъемного механизма, крановой тележки и механизма поворота также в том случае, если указанное устройство 340 гашения маятниковых движений регистрирует релевантные для маятниковых движений параметры движения.
Для этого кран 1 может использовать указанное устройство 60 регистрации, которое регистрирует наклонную тягу подъемного троса 207 и/или отклонения грузового крюка 208 относительно вертикали 61, которая проходит через точку подвеса грузового крюка 208, то есть через крановую тележку 206. В частности может регистрироваться угол ϕ натяжения троса относительно линии действия силы тяжести, то есть вертикали 61, см. фиг. 1.
В зависимости от зарегистрированного отклонения относительно вертикали 61, в частности учитывая направление и величину отклонения, устройство 3 управления может при помощи устройства 340 гашения маятниковых движений управлять приводом механизма поворота и приводом крановой тележки, для того чтобы приводить крановую тележку 206 снова в более или менее точное положение над грузовым крюком 208 и компенсировать или сокращать, или и вовсе не допускать маятниковые движения.
Для этого устройство 340 гашения маятниковых движений может иметь также средства 342 определения для определения динамических деформаций структурных элементов конструкции, причем компонент 341 управления устройства 340 гашения маятниковых движений, который оказывает гасящее маятниковые движения воздействие на управление приводными устройствами, выполнен для того, чтобы при оказании воздействия на управление приводными устройствами учитывать найденные динамические деформации структурных элементов конструкции крана.
При этом средства 342 определения могут включать в себя устройство 343 оценки, которое деформации и смещения конструкции машины под динамическими нагрузками, которые возникают в зависимости от введенных на посте управления команд управления и/или в зависимости от найденных управляющих действий приводных устройств и/или в зависимости от найденных профилей скорости и/или ускорения приводных устройств, оценивает с учетом характеризующих конструкцию крана имеющихся условий. В частности, блок 348 вычислений может структурные деформации и проистекающие из них смещения структурных элементов конструкции вычислять на основе сохраненной вычислительной модели в зависимости от введенных на посту управления команд управления.
Альтернативно или дополнительно устройство 340 гашения маятниковых движений может включать в себя также подходящую сенсорную технику 344, при помощи которой регистрируются такие упругие деформации и смещения структурных элементов конструкции под динамическими нагрузками. Такая сенсорная техника 344 может включать в себя, например, датчики деформации, такие как тензометрические датчики на стальной конструкции крана, например, на ферменных конструкциях башни 201 и/или стрелы 202 крана. Альтернативно или дополнительно могут быть предусмотрены датчики ускорения и/или скорости, для того чтобы регистрировать определенные смещения структурных элементов конструкции, как например движения ныряния конца стрелы крана и/или крутящие динамические эффекты на стреле 202 крана. Альтернативно или дополнительно могут быть также предусмотрены датчики наклона или гироскопы, например, на башне 201, в частности на ее верхнем участке, на котором установлена стрела крана, для того чтобы регистрировать динамику башни 201. Альтернативно или дополнительно могут быть также с силовыми передачами согласованы датчики движения и/или ускорения, для того чтобы была возможность регистрировать динамику силовых передач. Например, могут быть с отклоняющими роликами крановой тележки 206 для подъемного троса и/или с отклоняющими роликами для оттяжного троса стрелы с изменяемым вылетом согласованы датчики вращения, для того чтобы была возможность регистрировать действительную скорость троса в актуальной точке.
В частности устройство 340 гашения маятниковых движений может включать в себя устройство фильтрации и/или наблюдатель 345, который наблюдает за реакциями крана, которые устанавливаются при определенных регулирующих переменных регуляторов 347 приводов, и с учетом заданных правил динамической модели крана, которая может быть добыта принципиально по-разному и может получаться посредством анализа и имитирования стальной конструкции, оказывает на основе отслеженных реакций крана воздействие на регулирующие переменные регулятора.
Такое устройство 345 фильтрации или наблюдения может быть выполнено в частности в виде так называемого фильтра 346 Калмана, на который в качестве входной величины подаются регулирующие переменные регуляторов 347 приводов крана и движения крана, в частности угол ϕ натяжения троса относительно вертикали 62 и/или его изменение во времени или угловая скорость указанной наклонной тяги, и который, исходя из этих входных величин, оказывает на основе уравнений Калмана, которые моделируют динамическую систему конструкции крана, в частности его структурных элементов конструкции и силовых передач, соответствующее воздействие на регулирующие переменные регуляторов 347 приводов, для того чтобы достигать необходимого, гасящего маятниковые движения действия.
При помощи такой регулировки наклонной тяги в частности деформации и формы колебаний башенного поворотного крана под нагрузкой могут гаситься или изначально предотвращаться, как они показаны в качестве примера на фиг. 7, причем там частичный вид a) сначала схематично показывает деформацию ныряния башенного поворотного крана под нагрузкой вследствие изгиба башни 201 с сопутствующим опусканием стрелы 202 крана и связанную с ней наклонную тягу подъемного троса.
Далее частичные виды b) и c) с фиг. 7 показывают в качестве примера схематичным образом поперечную деформацию башенного поворотного крана на изображении в перспективе, а также на виде сверху с возникающими при этом деформациями башни 201 и стрелы 202 крана.
Наконец, фиг. 7 показывает на своих частичных видах d) и e) связанную с такими поперечными деформациями наклонную тягу подъемного троса.
Для того чтобы противодействовать соответствующей динамике колебаний, устройство 340 гашения маятниковых движений может включать в себя регулировку наклонной тяги. В частности, при помощи средств 62 определения положение грузового крюка 208, в частности также его наклонная тяга относительно вертикали, то есть отклонение подъемного троса 207 относительно вертикали, регистрируется и подается на указанный фильтр 346 Калмана.
Предпочтительно датчики положения могут быть выполнены для того, чтобы регистрировать груз или грузовой крюк 208 относительно фиксированной мировой системы координат, и/или устройство 340 гашения маятниковых движений может быть выполнено для того, чтобы позиционировать груз относительно фиксированной мировой системы координат.
Благодаря регистрации положения груза может при этом реализовываться регулировка наклонной тяги, которая устраняет или, по меньшей мере, сокращает статическую деформацию из-за подвешенного груза. Для того чтобы динамику колебаний сокращать или даже изначально не допускать, устройство 340 гашения маятниковых движений может быть выполнено для того, чтобы корректировать механизм поворота или механизм крановой тележки таким образом, что трос находится по возможности всегда в вертикальной ориентации относительно груза, даже если кран наклоняется ввиду увеличения момента груза все больше вперед.
Например, при подъеме груза с земли может учитываться движение ныряния крана вследствие его деформации под нагрузкой, и механизм крановой тележки с учетом зарегистрированного положения груза может перемещаться следом таким образом или при упреждающей оценке деформации ныряния позиционироваться таким образом, что подъемный трос при возникающей деформации крана находится в вертикальной ориентации над грузом. Максимальная статическая деформация возникает при этом в точке, в которой груз покидает землю. В этом случае регулировка наклонной тяги больше не требуется. Соответственно может альтернативно или дополнительно также механизм поворота с учетом зарегистрированного положения груза перемещаться следом таким образом и/или при упреждающей оценке поперечной деформации позиционироваться таким образом, что подъемный трос при возникающей деформации крана находится в вертикальной ориентации над грузом.
Такая регулировка наклонной тяги может в более поздний момент времени снова активироваться оператором, который может вследствие этого использовать кран в качестве манипулятора. Таким образом, он может позиционировать груз только посредством нажатия и/или волочения. Регулировка наклонной тяги пытается при этом откликаться на отклонение, которое вызывается оператором. Вследствие этого может реализовываться управление манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН И СПОСОБ УПРАВЛЕНИЯ ТАКИМ КРАНОМ | 2017 |
|
RU2728315C2 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2017 |
|
RU2736896C2 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2017 |
|
RU2754118C2 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ ГРУЗА ПО ТРЕБУЕМОЙ ТРАЕКТОРИИ ГРУЗОПОДЪЕМНЫМ КРАНОМ МОСТОВОГО ТИПА | 2014 |
|
RU2564560C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДНЯТИЯ ГРУЗА | 2018 |
|
RU2768693C2 |
| Способ адаптивного управления мостовым краном | 2020 |
|
RU2744647C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ И/ИЛИ АВТОПОГРУЗЧИКА | 2017 |
|
RU2741456C2 |
| БАШЕННЫЙ ПОВОРОТНЫЙ КРАН | 2013 |
|
RU2623287C2 |
| КРАН, А ТАКЖЕ СПОСОБ КОНТРОЛЯ УСТРОЙСТВА ПРЕДОХРАНЕНИЯ ОТ ПЕРЕГРУЗОК УКАЗАННОГО КРАНА | 2016 |
|
RU2709322C2 |
| КРАН, А ТАКЖЕ СПОСОБ КОНТРОЛЯ ПРЕДОХРАНЕНИЯ ОТ ПЕРЕГРУЗОК ТАКОГО КРАНА | 2016 |
|
RU2722326C2 |

Изобретение относится к крану (1), в частности башенному поворотному крану. Кран содержит закрепленное на подъемном тросе грузозахватное средство (208), приводные устройства для движения нескольких крановых элементов и для перемещения грузозахватного средства, а также устройство (3) управления для управления приводными устройствами. Грузозахватное средство перемещается вдоль пути перемещения по меньшей мере между двумя целевыми точками. Устройство управления имеет модуль (300) определения пути перемещения для определения желаемого пути перемещения по меньшей мере между двумя целевыми точками и автоматический модуль (310) управления перемещением для автоматического перемещения грузозахватного средства вдоль найденного пути перемещения. Достигается усовершенствование крана с уменьшенным риском нежелательных маятниковых движений груза. 14 з.п. ф-лы, 7 ил.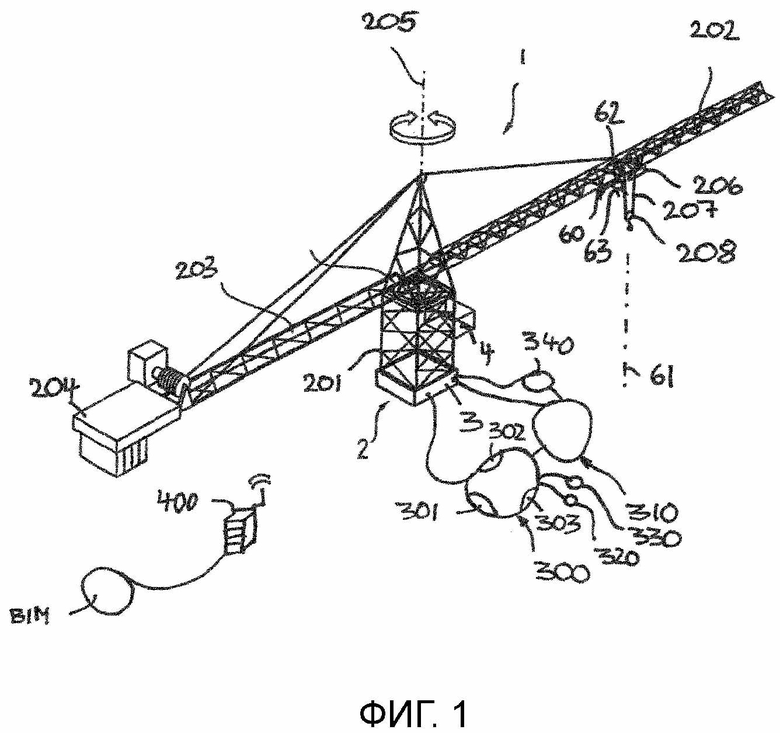
1. Кран, в частности башенный поворотный кран, с закрепленным на подъемном тросе (207) грузозахватным средством (208), приводными устройствами для движения нескольких крановых элементов и для перемещения грузозахватного средства (208), а также с устройством (3) управления для управления приводными устройствами таким образом, что грузозахватное средство (208) перемещается вдоль пути перемещения по меньшей мере между двумя целевыми точками (500, 510),
при этом устройство (3) управления имеет
- модуль (300) определения пути перемещения для определения желаемого пути перемещения, по меньшей мере, между двумя целевыми точками (500, 510), который соединен с устройством (330) воспроизведения для определения желаемого пути перемещения и/или желаемых целевых и промежуточных точек (500... 510) пути перемещения посредством ручного перемещения грузозахватного средства вдоль желаемого пути перемещения, и
- автоматический модуль (310) управления перемещением для автоматического перемещения грузозахватного средства (208) вдоль найденного пути перемещения,
отличающийся тем, что
модуль (300) определения пути перемещения связан с внешним центральным компьютером (400), который обладает доступом к модели данных строения (BIM - Building Information Model) и предоставляет целевые и промежуточные точки (500... 510) для определения пути перемещения, причем центральным компьютером (400) предоставляются обновляемые циклично или непрерывно данные, касающиеся границ рабочего участка и/или контуров строения на различных этапах строительства, и модуль определения пути перемещения выполнен для того, чтобы при определении пути перемещения учитывать обновляемые данные, касающиеся границ рабочего участка и/или контуров строения.
2. Кран по п. 1, причем модуль (300) определения пути перемещения имеет модуль (301) управления двух точек для определения пути перемещения между целевыми точками (500, 510), причем модуль (301) управления двух точек имеет функцию сглаживания и выполнен для асинхронной работы таким образом, что при достижении области сглаживания целевой точки осуществляется отклонение без точного контакта с этой целевой точкой к следующей целевой точке, причем сглаживание начинается, если последняя ось перемещения достигает сферы пространства вокруг целевой точки, или выполнен для синхронной работы таким образом, что при достижении области сглаживания целевой точки осуществляется отклонение без точного контакта с этой целевой точкой к следующей целевой точке, причем сглаживание начинается, если ведущая ось перемещения достигает сферы пространства вокруг целевой точки.
3. Кран по п. 1 или 2, причем модуль (300) определения пути перемещения имеет модуль (302) управления множества точек для определения множества промежуточных точек (501, 502, 503...) между двумя целевыми точками (500, 510), причем модуль (302) управления множества точек выполнен для того, чтобы устанавливать множество промежуточных точек на равноудаленном расстоянии друг от друга.
4. Кран по любому из пп. 1-3, причем модуль (300) определения пути перемещения имеет модуль (303) управления траектории для определения непрерывной, математически заданной траектории между двумя целевыми точками (500, 510).
5. Кран по любому из пп. 1-4, причем модуль (300) определения пути перемещения соединен с устройством (320) обучения для определения желаемого пути перемещения посредством ручного достижения желаемых целевых и промежуточных точек (500... 510).
6. Кран по любому из пп. 1-5, причем модуль (300) определения пути перемещения выполнен для того, чтобы учитывать границы рабочего участка и устанавливать путь перемещения вокруг границ рабочего участка.
7. Кран по любому из пп. 1-6, причем предусмотрено устройство (340) гашения маятниковых движений, причем автоматический модуль (310) управления перемещением учитывает предписания и/или сигнал устройства (340) гашения маятниковых движений при управлении приводными устройствами и при определении скоростей и/или ускорений перемещения приводных устройств.
8. Кран по п. 7, причем устройство (340) гашения маятниковых движений имеет устройство (60) регистрации для регистрации отклонения подъемного троса (207) и/или грузозахватного средства (208) относительно вертикали (61), проходящей через точку подвеса подъемного троса (207), причем автоматический модуль (310) управления перемещением управляет приводными устройствами в зависимости от сигнала отклонения и/или наклонной тяги указанного устройства (61) регистрации.
9. Кран по п. 7 или 8, причем устройство (340) гашения маятниковых движений имеет средства (342) определения для определения деформаций и/или смещений структурных элементов конструкции крана вследствие динамических нагрузок, причем компонент (341) управления устройства (340) гашения маятниковых движений выполнен для того, чтобы при оказании воздействия на управление приводными устройствами учитывать найденные деформации и/или смещения структурных элементов конструкции вследствие динамических нагрузок.
10. Кран по п. 9, причем структурные элементы конструкции включают в себя башню (201) и/или стрелу (202) крана и средства (342) определения выполнены для того, чтобы определять деформации и/или нагрузки башни (201) и/или стрелы (202) крана вследствие динамических нагрузок.
11. Кран по п. 9 или 10, причем структурные элементы конструкции включают в себя элементы силовых передач, такие как элементы механизма поворота, элементы привода крановой тележки и тому подобное, и средства (342) определения выполнены для того, чтобы определять деформации и/или смещения элементов силовых передач вследствие динамических нагрузок.
12. Кран по любому из пп. 9-11, причем средства (342) определения имеют устройство (343) оценки для оценки деформаций и/или смещений структурных элементов конструкции вследствие динамических нагрузок на основе цифровых данных описывающей конструкцию крана модели данных и/или имеют блок (348) вычислений, который вычисляет структурные деформации и проистекающие из них смещения структурных элементов конструкции на основе сохраненной вычислительной модели в зависимости от введенных на посту управления команд управления, и/или сенсорную технику (344) для регистрации деформаций и/или динамических параметров структурных элементов конструкции.
13. Кран по п. 12, причем сенсорная техника (344) имеет датчик наклона и/или ускорения для регистрации наклонов и/или скоростей башни, датчик скорости и/или ускорения поворота для регистрации скорости и/или ускорения поворота стрелы крана, и/или датчик движения ныряния для регистрации движений и/или ускорений ныряния стрелы крана, и/или датчик скорости и/или ускорения троса для регистрации скоростей и/или ускорений подъемного троса (207).
14. Кран по любому из пп. 9-13, причем устройство (340) гашения маятниковых движений имеет устройство (345) фильтрации и/или наблюдения для оказания воздействия на регулирующие переменные регуляторов (347) приводов для управления приводными устройствами, причем указанное устройство (345) фильтрации и/или наблюдения выполнено для того, чтобы в качестве входных величин получать регулирующие переменные регуляторов (347) приводов и зарегистрированные и/или оцененные смещения элементов крана и/или деформации и/или смещения структурных элементов конструкции, которые возникают вследствие динамических нагрузок, и в зависимости от полученных для определенных регулирующих переменных регуляторов индуцируемых динамически движений элементов крана и/или деформаций структурных элементов конструкции оказывать воздействие на регулирующие переменные регуляторов, причем устройство (345) фильтрации и/или наблюдения выполнено в виде фильтра (346) Калмана, причем реализованы зарегистрированные, и/или оцененные, и/или вычисленные, и/или смоделированные в фильтре (346) Калмана функции, которые характеризуют динамику структурных элементов конструкции крана.
15. Кран по любому из пп. 1-14, причем устройство (3) управления включает в себя датчики положения, которые выполнены для того, чтобы регистрировать грузозахватное средство (208) относительно фиксированной мировой системы координат, и/или выполнены для того, чтобы позиционировать грузозахватное средство (208) относительно фиксированной мировой системы координат.
| DE 10064182 A1, 08.05.2002 | |||
| CN 101704472 A, 12.05.2010 | |||
| DE 102005002192 A, 27.07.2006 | |||
| US 2012234787 A1, 20.09.2012 | |||
| US 2013345857 A1, 26.12.2013 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЛИНЕЙНОГО ИЛИ УГЛОВОГО ПЕРЕМЕЩЕНИЯ ОБОРУДОВАНИЯ ИЛИ МЕХАНИЗМА ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ВАРИАНТЫ) | 2009 |
|
RU2403204C1 |

