Настоящее изобретение касается строительной машины, в частности в виде крана, такого как башенный поворотный кран, имеющей устройство управления для управления по меньшей мере одним рабочим агрегатом строительной машины с применением модели данных строительного объекта, которая содержит цифровую информацию о сооружаемом и/или обрабатываемом строительном объекте. Изобретение касается также способа управления такой строительной машиной с помощью цифровых данных из такой модели данных строительного объекта.
Планирование крановых работ на стройплощадках сегодня чаще всего осуществляется путем подготовки работ участвующих строительных предприятий или, соответственно, в деталях бригадиром на месте. При этом основами планирования являются рабочие планы, которые чаще всего являются еще двух-, иногда также уже трехмерными, далее, временной график и частично смета строительного проекта. Так как рабочие планы чаще всего связаны со спецификой объекта, окончательный контроль защиты крана от столкновений возможен только при производстве работ. Последующее внесение временных сдвигов отдельных задач, а также изменения плана в эти документы часто своевременно не произведено.
В последнее время для планирования, сооружения, обработки и проверки строительных объектов также иногда уже применяются цифровые модели данных строительного объекта, которые иногда называются BIM (Building Information Model, англ. информационная модель здания) и содержат цифровую информацию о сооружаемом или, соответственно, обрабатываемом строительном объекте, причем речь идет здесь, в частности, об общей модели, которая, как правило, содержит трехмерные планировки всех объектов, временной график, а также смету. Такие модели данных строительных объектов или BIMs, как правило, представляют собой считываемые компьютером файлы или конгломераты файлов и при необх. блоки обрабатывающих компьютерных программ для обработки таких файлов, в которых (содержатся) информация и характеристики, описывающие сооружаемый или, соответственно, обрабатываемый строительный объект и его релевантные свойства в виде цифровых данных.
Вообще такие модели строительных объектов могут содержать двух-, трех- или многомерные CAD-данные для визуализации строительного объекта и/или частей этого строительного объекта, а также включать в себя другую релевантную информацию о строительном объекте, например, временной график его сооружения; смету, информацию об окружающей инфраструктуре, такой как подъездные дороги, энерго- и водоснабжение или логистическая информация о необходимых вспомогательных средствах для сооружения или, соответственно, обработки строительного объекта. В качестве характерных данных строительного объекта часто содержатся размеры строительного объекта, такие как объем сооружения, высота строительного объекта, размеры протяженности в вертикальной проекции и горизонтальной проекции, объемы материалов, такие как необходимый объем бетона, объем кирпича и прочее, или веса конструктивных элементов отдельных компонентов строительного объекта, таких как стальные балки, готовые строительные элементы или тому подобное. При этом модель данных строительного объекта и ее файлы или, соответственно, конгломерат файлов часто обладает возможностью пересылки и/или сетевого доступа, чтобы иметься в распоряжении у разных участников строительства.
С помощью таких моделей строительных объектов обрабатываются с компьютерной поддержкой многие процессы при сооружении строительного объекта, при этом, например, при классическом планировании строительных работ архитектор составляет эскиз и чертит его с помощью систем CAD, после чего затем для калькуляции затрат на базе чертежей CAD может производиться определение количества или могут представляться планы другим инженерам-специалистам, экспертам пожарной охраны или учреждениям. При возникновении изменений планирования чертежи изменяются и согласовываются с участниками, при этом корректируется определение количества и перерабатывается калькуляция затрат, причем это все заметно упрощается при помощи интегрированной BIM и по меньшей мере частично решается автоматически модулями программного обеспечения, которые могут получать доступ к данным модели строительного объекта.
В этом контексте уже предлагалось включать в BIM или, соответственно, модель данных строительного объекта данные, касающиеся эксплуатации крана. Публикация WO 2016/019158 A1 описывает, например, способ, посредством которого BIM актуализируется рабочими данными крана, при этом на основании конструктивных элементов, которые должны передвигаться краном, генерируется хронологическая последовательность или, соответственно, временной график, который содержит необходимые крановые работы, и интегрируется в модель данных BIM. Тогда BIM может на основании сгенерированной хронологической последовательности актуализировать другие функции BIM.
Далее, публикация WO 2013/006625 A1 описывает способ маневрирования краном в пределах стройплощадки при помощи данных из BIM-модели, при этом сопоставляются друг с другом, с одной стороны, глобальные 3D-координаты, которые определяются с помощью сенсоров абсолютного положения, а с другой стороны, глобальные 3D-координаты, которые характеризуют сооружаемый строительный объект и положение частей строительного объекта и заложены в BIM-модели.
Однако, в результате функциональная выгода предусматриваемой до сих пор привязки крана к BIM-модели ограничена. В частности, до сих пор не удавалось достичь решающих преимуществ при управлении строительными машинами, такими как краны или экскаваторы, и их манипулированием с помощью BIM-моделей. К тому же проблемы реального времени, которые могут возникать при применении BIM-данных для управления краном из-за ограниченных скоростей передачи данных и диапазонов полос пропускания, в частности, при задачах управления, чувствительных ко времени, таких как демпфирование раскачивания, до сих по удовлетворительным образом не решены.
Поэтому в основе настоящего изобретения лежит задача, создать улучшенную интеграцию строительных машин и их эксплуатации в модели данных строительных объектов и/или улучшенную привязку строительных машин к таким моделям данных строительных объектов, которые устранят недостатки уровня техники и предпочтительным образом усовершенствуют последние. В частности, должно достигаться более эффективное и более надежное управление строительными машинами за счет улучшенной привязки к BIM-моделям.
В соответствии с изобретением названная задача решается с помощью строительной машины по п. 1 формулы изобретения, а также способа управления ею по п. 20 формулы изобретения. Предпочтительные варианты осуществления изобретения являются предметом зависимых пунктов формулы изобретения.
Итак, согласно одному аспекту изобретения предлагается привязать управление применяемой на стройплощадке строительной машины к компьютеру управления стройплощадкой, который имеет доступ к модели данных строительного объекта, соответственно, BIM, так чтобы устройство управления строительной машины, напр., управление крана, могло обмениваться данными с моделью данных строительного объекта. В соответствии с изобретением строительная машина имеет соединяемый с компьютером управления стройплощадкой модуль обмена данными для обмена цифровыми данными с компьютером управления стройплощадкой, причем этот модуль обмена данными имеет средства чтения и/или записи для доступа к компьютеру управления стройплощадкой с целью чтения и/или записи. В частности, на основании цифровой информации из модели данных строительного объекта возможно вмешательство в управление строительной машины и/или параметрирование и/или модификация управления строительной машины. Альтернативно или дополнительно устройство управления строительной машины может переносить данные на компьютер управления стройплощадкой, чтобы актуализировать и/или дополнять модель данных строительного объекта и/или вообще переносить цифровые данные на модель данных строительного объекта и сохранять там.
Привязка устройства управления строительной машины к компьютеру управления стройплощадкой и предоставляемая им модель данных строительного объекта может, в принципе, использоваться для разных функций эксплуатации строительной машины и менеджмента стройплощадки. В частности, предоставление цифровых данных из модели данных строительного объекта устройству управления строительной машины может использоваться для того, чтобы полуавтоматически или полностью автоматизированным образом выполнять разные рабочие процессы строительной машины, в частности определенные процессы перемещения строительной машины и/или передвижения конструктивных элементов строительной машиной.
Компьютер управления стройплощадкой, который имеет доступ к модели данных строительного объекта, может, в частности, предоставлять цифровую локальную информацию о монтируемом конструктивном элементе, в частности, куда и когда доставляется определенный конструктивный элемент, где находится определенный конструктивный элемент и/или в каком месте строительного объекта должен монтироваться данный конструктивный элемент. Если, например, устройство управления крана получает доступ к такой цифровой информации, касающейся монтируемого конструктивного элемента, определенные движения крана и/или движения рабочего хода конструктивного элемента могут осуществляться по меньшей мере частично автоматизированным образом.
В усовершенствовании изобретения устройство управления строительной машины и/или компьютер управления стройплощадкой может включать в себя модуль локализации конструктивных элементов, например, в виде блока программного обеспечения, посредством которого принимаемый строительной машиной конструктивный элемент может локализоваться на стройплощадке на основании цифровой информации из модели данных строительного объекта. В BIM или, соответственно, модели данных строительного объекта могут быть, например, сохранены места складирования или станция доставки и момент времени доставки, при этом строительная машина или, соответственно, кран вместе со своим грузозахватным средством тогда, когда этот конструктивный элемент должен монтироваться в соответствии с временным графиком, сохраненным в BIM, по меньшей мере частично автоматизированным образом может перемещаться к положению складирования или, соответственно, доставки конструктивного элемента. Это может осуществляться, например, таким образом, что на дисплее строительной машины отображается, что следующий обрабатываемый конструктивный элемент находится в определенном положении, и машинисту в диалоговом поле задается вопрос, должно ли совершаться автоматическое приближение к этому положению, что затем может выполняться, если машинист это подтвердит. При необходимости выполнение может также осуществляться полностью автоматизированным образом.
В предпочтительном варианте осуществления изобретения прием конструктивного элемента может также осуществляться автоматизированным образом или, соответственно, поддерживаться компьютером стройплощадки. В частности, может быть предусмотрено регистрирующее устройство для регистрации конструктивного элемента, находящегося в приемной и/или рабочей области строительной машины, при этом названное регистрирующее устройство может, например, иметь камеру и/или сенсор с выводом изображения и/или сканер штрихового кода и/или RFID-считыватель, чтобы можно было идентифицировать, например, конструктивный элемент, находящийся вблизи грузового крюка крана. Если регистрирующее устройство опознает определенный конструктивный элемент, например, по нанесенному на нем штриховому коду или подаваемому им RFID-сигналу, устройство управления строительной машины на основании цифровых данных из модели данных строительного объекта, которые предоставляются компьютером стройплощадки, может определять, идет ли речь о «правильном» конструктивном элементе для следующего рабочего шага, и/или на каком участке или, соответственно, пункте сооружаемого строительного объекта должен размещаться или, соответственно, опускаться этот конструктивный элемент.
Альтернативно или дополнительно названному опознаванию RFID возможна также работа с помощью LWID, т.е. системы опознавания, работающей в низкочастотной или, соответственно, (англ.) Low Wave области. В частности, возможна также работа с помощью так называемой системы опознавания RuBee, при этом такая система RuBee поддерживает двунаправленную связь по запросу, при этом, например, возможна работа в частотном диапазоне порядка величины 100-150 кГц, но при необх. также выше, до 450 кГц. Такие RuBee-теги могут включать в себя микропроцессор, имеющий блок памяти, и использовать IP-адрес. В частности, опознавание RuBee может также использовать магнитные волны и/или поддерживать индуктивную связь, при этом опознавание RuBee отличается, в частности, своей механической прочностью по отношению к повреждениям металлическими частями и влаге и поэтому особенно пригодно для применения в строительных машинах или кранах.
В предпочтительном усовершенствовании изобретения управление строительной машины может также иметь блок управления рабочим ходом для автоматизированного управления рабочим ходом на основании релевантной информации из модели данных строительного объекта. При этом названный блок управления рабочим ходом может быть выполнен работающим полуавтоматическим или полностью автоматизированным образом, чтобы в комбинации с вводом, или разрешением, или командами подтверждения машиниста, или при необх. также без таких дополняющих команд управления выполнять рабочий ход автоматизированным образом. Для этого при полуавтоматическом исполнении машинист может идентифицировать переносимый строительной машиной конструктивный элемент. Альтернативно может также осуществляться автоматизированное опознавание конструктивного элемента, как пояснялось выше, чтобы, например, идентифицировать груз, принимаемый на крановый крюк крана.
Затем для зарегистрированного и/или идентифицированного конструктивного элемента посредством привязки устройства управления строительной машины к компьютеру управления стройплощадкой отсюда на основании модели данных строительного объекта и релевантной цифровой информации может определяться, к какому месту строительного объекта должен переноситься конструктивный элемент, причем для этого, в частности, могут использоваться данные положения для данного конструктивного элемента из модели данных строительного объекта.
Модуль управления рабочим ходом может из предоставленных компьютером управления стройплощадкой данных BIM, касающихся идентифицированного конструктивного элемента, и при необх. других характеристик строительного объекта, таких как контуры строительного объекта, рассчитывать путь перемещения для автоматизированного рабочего хода, при необх. с учетом других топографических данных стройплощадки, таких как подъездные пути и прочее.
Альтернативно или дополнительно к такому автоматизированному перемещению строительной машины с помощью названного блока управления рабочим ходом, может быть также предусмотрен блок блокировки, который в комбинации с моделью данных строительного объекта может блокировать соответствующий рабочий ход или, соответственно, соответствующий рабочий шаг строительной машины, в частности, когда, например, соответствующий конструктивный элемент уже был смонтирован, или еще не был смонтирован необходимый для монтажа это конструктивного элемента присоединительный узел.
Названный блок блокировки может, в частности, работать в комбинации с вышеназванным контролем продвижения строительства, в частности таким образом, что на основании ранее поясненного сопоставления номинального/фактического продвижения строительства определяется, готов ли строительный объект к соответственному переносу данного конструктивного элемента. тем самым могут предотвращаться ненужные рабочие ходы с конструктивными элементами, которые еще не могут монтироваться или, соответственно, положение монтажа которых еще не готово.
Блок блокировки и/или вышеназванный блок управления рабочим ходом могут быть интегрированы в устройство управления машины и/или обладать возможностью загрузки и/или установки в виде инструментов программного обеспечения, напр., с компьютера управления стройплощадкой, или же привязываться к устройству управления машины в виде сохраненного отдельного блока. Предпочтительно блок блокировки и/или блок управления рабочим ходом могут параметрироваться и/или модифицироваться посредством цифровой информации из модели данных строительного объекта.
Чтобы можно было по меньшей мере частично автоматизированным образом перемещать конструктивный элемент, т.е. принимать в определенном пункте и опускать в определенном пункте, устройство управления строительной машины или, соответственно, вышеназванный блок управления рабочим ходом может предпочтительно обрабатывать и получать от компьютера стройплощадки по меньшей мере трехмерные координаты, при этом предоставленными компьютером управления стройплощадкой координатами положения места захвата груза могут быть, например, X1, Y1 и Z1, а координатами положения пункта выгрузки, например, X2, Y2 и Z2, то есть, предпочтительно, могут включать в себя всегда координаты X и Y вертикальной проекции, а также координаты Z высоты. Названная система координат XYZ может, например, представлять собой постоянную, то есть относящуюся к сооружаемому строительному объекту, систему координат стройплощадки или строительного объекта, которая всегда указывает положения погрузки и выгрузки относительно сооружаемого строительного объекта. Названные координаты XYZ могут, например, запрашиваться из модели данных строительного объекта или, соответственно, предоставляться ею.
Предпочтительно положения погрузки и выгрузки данного конструктивного элемента задаются также по меньшей мере одной другой координатой, а именно в частности, координатой ϕ угла или, соответственно, ориентации, которая, в частности, может указывать угол вращения или, соответственно, угловую ориентацию конструктивного элемента относительно вертикальной оси. Если в качестве строительной машины применяется кран для переноса конструктивного элемента от места доставки к месту монтажа, этот кран может предпочтительно иметь устройство поворота для поворота грузового крюка вокруг вертикальной оси. Это может осуществляться, например, с помощью привода вращения, предназначенного непосредственно для самого грузового крюка, например, чтобы поворачивать грузовой крюк относительно канатного шкива. Альтернативно или дополнительно может также соответственно поворачиваться приводом вращения каретки перемещающаяся на стреле крана каретка, чтобы можно было принимать и опускать конструктивный элемент в разных угловых ориентациях.
В зависимости от станции доставки или, соответственно, временного склада товаров угловая ориентация при приеме груза может задаваться и быть известна при приеме груза, например, считываться из модели данных строительного объекта, если там заложена эта ориентация. Альтернативно или дополнительно кран или, соответственно, строительная машина может быть также снабжена регистрирующим устройством для регистрации угловой ориентации, например, камерой, посредством которой, например, может определяться ориентация готовой стены или стальной балки. Эта определяемая при приеме конструктивного элемента угловая ориентация ϕ1 может затем путем поворота грузового крюка или каретки преобразовываться в желаемую угловую ориентацию ϕ2 в месте монтажа, при этом необходимая ориентация конструктивного элемента в месте монтажа может считываться из модели данных строительного объекта и/или может определяться путем регистрации ориентации уже смонтированных присоединительных конструктивных элементов, например, в свою очередь, посредством камеры.
При необходимости дополнительно к угловой координате ϕ, которая определяет угловую ориентацию относительно вертикальной оси вращения, могут использоваться другие координаты угловой ориентации, например, когда один конструктивный элемент, такой как, например, длинная балка посредством двух кранов должен совместно подниматься и, например, опускаться в не точно горизонтальной ориентации.
Чтобы простым и удобным обеспечить возможность точной юстировки положения строительной машины или, соответственно, ее грузозахватного средства и/или принятого на него конструктивного элемента, устройство управления строительной машины может располагать модулем управления перемещением, который имеет по меньшей мере один элемент обслуживания, имеющий оси привода, ориентация которых соответствует желаемым осям перемещения таким образом, что движение элемента обслуживания в определенном направлении вызывает перемещение строительной машины или, соответственно, грузозахватного средства в соответствующем направлении, и/или поворот элемента обслуживания вокруг оси вращения вызывает поворот грузозахватного средства вокруг параллельной ей оси вращения в соответствующем направлении. Элемент обслуживания может, например, представлять собой джойстик, который может наклоняться по разным осям, чтобы создавать движения перемещения в соответствующих направлениях и/или может поворачиваться, чтобы обеспечивать возможность поворота конструктивного элемента, как это было описано ранее. Альтернативно или дополнительно в качестве элемента обслуживания могут находить применение сдвижные и/или нажимные кнопки и/или сенсорный экран, на котором могут регистрироваться движения пальцев в определенных направлениях или вращения.
Предпочтительно этот модуль управления перемещением или, соответственно, его по меньшей мере один элемент обслуживания предусмотрен не в кабине машиниста, где, конечно, также могут быть предусмотрены соответствующие средства управления перемещением, а в непосредственной близости к грузозахватному средству строительной машины, например, непосредственно на грузовом крюке или, соответственно, обводном шкиве крана, на котором установлен грузовой крюк. Например, на грузовом крюке или соединенной с ним части структуры на каждой из ее четырех сторон могут быть установлены нажимные кнопки, которые при нажатии инициируют движение перемещения в направлении движения нажатия, вследствие чего становится возможна интуитивная точная юстировка ориентации или, соответственно, положения грузового крюка. Альтернативно или дополнительно может быть предусмотрена поворачивающаяся вокруг вертикальной оси вращающаяся ручка управления, посредством которой грузовой крюк или каретка может поворачиваться вокруг вертикальной оси, чтобы можно было регулировать вышеназванный угол ϕ направления.
Альтернативно или дополнительно к такому модулю управления положением для точной юстировки прямо на грузозахватном средстве, названный модуль управления перемещением может быть также реализован в виде мобильного устройства управления, например, в виде планшета, который может возить с собой машинист, находящийся возле грузозахватного средства. Ориентация заданных на планшете осей управления может совсем просто согласовываться с движениями осей строительной машины, например, таким образом, что машинист приводит самого себя или, соответственно, планшет в предопределенную ориентацию относительно строительной машины, например, самого себя спиной к башне крана под ее стрелой и/или планшет в определенную ориентацию относительно стрелы крана, и/или самого себя или планшет в определенную ориентацию относительно строительного объекта, который должен сооружаться и ориентация которого, конечно, известна модели данных строительного объекта.
Альтернативно или дополнительно соответствующее устройство управления перемещением и/или ориентацией может быть также расположено на перемещаемом конструктивном элементе, положением и ориентацией которого в итоге должно осуществляться управление. Например, соответствующий управляющий планшет для точной юстировки может размещаться в отмеченном пункте монтажа на конструктивном элементе, чтобы можно было производить точную юстировку или, соответственно, позиционирование названным образом.
Например, временная установка модуля управления перемещением на юстируемом конструктивном элементе и/или принимающем конструктивный элемент грузозахватном средстве в предопределенной ориентации относительно него, что, например, может осуществляться с помощью удерживания на конструктивном элементе и/или грузозахватном средстве и/или расположенной на нем маркировки, одновременно позволяет подходящим образом связывать оси ориентации элемента обслуживания модуля управления перемещением с осями движения строительной машины, так как временная установка в предопределенной ориентации фиксирует оси движения элемента обслуживания и обеспечивает возможность интуитивного обслуживания. Когда, например, планшет размещается в предопределенной ориентации на основной поверхности готовой стены, управление крана из модели данных строительного объекта и/или посредством надлежащей сенсорики опознает ориентацию этой стены, так что нажатие стрелок вправо-влево-вверх-вниз или соответствующее движение проведения по планшету может преобразовываться в движение установки крана в желаемом направлении.
Альтернативно или дополнительно названный модуль управления перемещением или, соответственно, его по меньшей мере один элемент обслуживания может быть частью снаряжения, в частности частью предмета одежды или, соответственно, самонесущим образом закрепляемого на теле предмета машиниста, в частности в виде т.н. надеваемого электронного блока. В частности, для точной юстировки положения грузозахватного средства строительной машины может находить применение перчатка, оснащенная соответствующей сенсорикой. Такая перчатка может быть, например, снабжена по меньшей мере одним сенсором ускорения и/или направления, который, например, может регистрировать движения взмаха ладони вверх или вниз, чтобы направлять грузовой крюк крана с помощью жестового управления вверх или вниз. Альтернативно или дополнительно такая перчатка может также включать в себя пьезосенсор, который реагирует на давление, например, таким образом, что при нажатии наружной поверхностью перчатки грузовой крюк отталкивается, а при нажатии на внутреннюю поверхность ладони перчатки грузовой крюк притягивается в противоположном направлении.
Как пояснялось ранее в связи с вариантом планшета, направление команды нажатия или движения перчатки может при этом, например, регистрироваться или, соответственно, определяться таким образом, что перчатка прикладывается к предопределенному месту конструктивного элемента, например, фронтальной стороне передвигаемой готовой стены, ориентация которого/которой известна устройству управления строительной машины из BIM или посредством надлежащей сенсорики, например, посредством камеры, смотрящей вниз со стрелы крана. Если устройству управления известна ориентация конструктивного элемента или грузозахватного средства, к которому прикладывается перчатка, устройству управления известна также ориентация перчатки.
Альтернативно или дополнительно можно было бы также регистрировать ориентацию перчатки посредством надлежащей сенсорики, напр., посредством гироскопических сенсоров и/или компасных элементов и/или сенсоров наклона и/или модулей GPS и пр., чтобы распределять определенные сигналы нажатия интегрированных в перчатку сенсоров в определенных направлениях создаваемого установочного движения.
Такая перчатка может также включать в себя несколько сенсоров, например, сенсоров нажатия, которым присвоены разные направления движения и/или функции управления, так что, например, при нажатии сенсора, установленного на указательном пальце, может начинаться другое движение перемещения, чем при нажатии сенсора поверхности ладони.
В предпочтительном усовершенствовании изобретения названный модуль управления перемещением для точного позиционирования соответственно принятого груза может беспроводным путем поддерживать связь с устройством управления строительной машины, при этом, например, может быть предусмотрена беспроводная передача управляющих сигналов. Но альтернативно может также осуществляться передача управляющих сигналов по сигнальному кабелю, например, через подъемный канат, на котором закреплен грузовой крюк крана.
Чтобы можно было плавно и без нарушений полуавтоматически или автоматически перемещать конструктивный элемент, принятый на грузозахватное средство строительной машины, в желаемое положение монтажа, в предпочтительном усовершенствовании изобретения может быть предусмотрено демпфирование раскачивания и/или демпфирование колебаний, чтобы демпфировать и в лучшем случае совсем устранять нежелательное движение раскачивания или колебания принятого конструктивного элемента. Если строительная машина представляет собой, например, кран, демпфирование раскачивания может предотвращать нежелательное раскачивание грузозахватного средства и закрепленного на нем конструктивного элемента относительно стрелы крана. Для кранов такие устройства демпфирования раскачивания известны в разных вариантах осуществления, например, путем активирования приводов механизма вращения, качания и каретки в зависимости от определенных сигналов сенсоров, например, сигналов наклона и/или гироскопа. Например, в публикациях DE 202008018260 U1 или DE 102009032270 A1 показаны известные демпферы раскачивания груза на кранах, на предмет которых в этой связи, т.е. в отношении исполнения устройства демпфирования качаний, делается непосредственная ссылка.
Чтобы обеспечить возможность автоматизированного приема груза на грузозахватное средство строительной машины, в частности на грузовой крюк крана, грузозахватное средство может быть выполнено особым образом, в частности иметь самосрабатывающее и/или приводимое в действие за счет сторонней энергии сцепное устройство и/или блокировочное устройство. Альтернативно или дополнительно к такому сцепному устройству грузозахватное средство и/или установленный на принимаемом конструктивном элементе приемный элемент может иметь средства центрирования дл центрирования грузозахватного средства относительно установленного на конструктивном элементе ответного элемента, например, в виде конической приемной выемки и взаимодействующего с ней конусообразного ответного элемента.
Альтернативно или дополнительно автоматический прием груза может быть также поддержан или, соответственно, реализован подводимым стропом, который облегчает подвод и нахождение положения сцепки или, соответственно, приема.
В частности, грузозахватное средство может включать в себя по меньшей мере один строповочный элемент, который обеспечивает возможность строповки и отсоединения разных грузов с помощью надлежащего, закрепленного на грузе или интегрированного в груз сцепного элемента. Предпочтительно названный строповочный элемент может автоматически крепиться и/или отсоединяться с помощью устройства управления строительной машины или, соответственно, крана.
Вмешательство в управление строительной машины через ее привязку к компьютеру управления стройплощадкой может также включать в себя адаптацию имплементированного там ограничения рабочей области к данным строительного объекта из модели данных строительного объекта, при этом предпочтительно динамическая во времени адаптация может осуществляться таким образом, чтобы ограничение рабочей области могло адаптироваться к имеющемуся продвижению строительных работ или, соответственно, могло изменяться постепенно.
Альтернативно или дополнительно к такой автоматической адаптации ограничения рабочей области может быть предусмотрен контроль продвижения строительства, при котором посредством надлежащего регистрирующего устройства, такого как, например, камера и/или сканер, регистрируется фактическое состояние строительного объекта и/или его окрестности и сопоставляется с цифровой информацией из модели данных строительного объекта. Для регистрации фактического состояния с помощью камеры могут регистрироваться и/или замеряться контуры строительного объекта, и/или имеющиеся конструктивные элементы считываться посредством сканера штрихового кода и/или регистрироваться посредством RFID-считывателя, и/или данные положения конструктивных элементов и/или контуров строительного объекта определяться посредством определителя местоположения, напр., в виде GPS- или радарного измерительного модуля.
На основании сравнения зарегистрированных фактических данных с надлежащими релевантными BIM-данными может осуществляться определение, на какой фазе строительства находится в текущий момент строительный объект. Затем на основании этого определения текущей фазы строительства с помощью соответствующего модуля определения фаз строительства могут вводиться разные поддерживающие и/или автоматизированные меры. Например, на устройстве отображения строительной машины может отображаться, какие рабочие шаги должны выполняться в следующую очередь и/или куда должен предписанным образом переноситься конструктивный элемент, доставленный на станцию доставки. Например, на основании инсталлированной информации из модели данных строительного объекта на устройстве отображения на пульте машиниста строительной машины может генерироваться виртуальное изображение строительного объекта в его данном состоянии, на котором отображается перемещаемый или, соответственно, переносимый в текущий момент конструктивный элемент и его положение, так что, напр., крановщик может видеть, какой следует делать рабочий ход и куда должен переноситься принимаемый на крюк конструктивный элемент.
Благодаря привязке строительной машины или, соответственно, относящейся к этой строительной машине модели данных машины, в которой содержится цифровая информация о разных моделях строительных машин, к модели данных строительного объекта или, соответственно, BIM, характеристики имеющихся в распоряжении строительных машин могут учитываться уже при планировании и выборе подходящей строительной машины, напр., крана подходящего класса грузоподъемности. При этом названная модель данных машины может предоставляться в виде блока программного обеспечения или приложения, который/которое имеет интерфейс для поддержания связи с моделью данных строительного объекта и, например, может загружаться с сервера или памяти программного обеспечения или же быть сохранен/сохранено на носителе данных.
Предпочтительно посредством модели данных машины может осуществляться автоматический выбор надлежащей строительной машины для сооружения и/или обработки данного строительного объекта на основании цифровой информации из модели данных строительного объекта и из модели данных машины, причем для этого может осуществляться автоматическая идентификация и считывание релевантной информации из модели данных строительного объекта на основании критериев, которые задаются моделью данных машины и касаются параметров машины, которыми разные модели строительных машин отличаются друг от друга. Затем на основании автоматического сравнения считанной информации из модели данных строительного объекта с параметрами машины разных строительных машин из модели данных машины осуществляется автоматический выбор надлежащей строительной машины.
Блоки, реализующие названные функции, могут быть, в частности, интегрированы в модель данных машины в виде инструментов программного обеспечения, а при необх. также быть реализованы в модели данных строительного объекта. При интеграции в привязываемую модель данных машины все функциональные возможности автоматического выбора подходящей строительной машины предоставляться загружаемым и/или инсталлируемым инструментом программного обеспечения, который реализует модель данных машины, и при этом осуществляться работа с BIM или, соответственно, моделью данных строительного объекта, которой необходим для этого только соответствующий интерфейс, через который может привязываться дополняющий инструмент программного обеспечения.
Релевантная информация из модели данных строительного объекта, которая необходима для выбора строительной машины и идентифицируется и считывается модулем идентификации и/или считывания, может включать в себя разные характеристики строительного объекта, такие как, например, высота строительного объекта, вес самого тяжелого передвигаемого конструктивного элемента, площадь и/или протяженность поперечного сечения строительного объекта и/или максимальное расстояние между заложенной в BIM станцией доставки конструктивных элементов и местом назначения конструктивного элемента, в котором должен монтироваться данный конструктивный элемент. Затем эти идентифицированные и считанные характеристики строительного объекта могут сравниваться модулем сравнения с релевантной информацией из модели данных машины, при этом релевантная информация машины может включать в себя, в частности, следующую информацию: высота рабочего хода машины, максимальная грузоподъемность машины и/или дальность действия машины. Если, например, необходимо выбрать для строительного объекта надлежащий кран, может выбираться кран, высота рабочего хода которого достаточна для высоты строительного объекта, грузоподъемность которого достаточна для веса самого тяжелого передвигаемого конструктивного элемента, и дальность действия которого достаточна для протяженности поперечного сечения строительного объекта в вертикальной проекции и/или максимального расстояния между станцией доставки конструктивных элементов и местом назначения конструктивного элемента. Если в модели данных машины содержатся несколько кранов, которые отвечают названным критериям, может выбираться наименьший кран, который отвечает названным требованиям и, так сказать, обладает наименьшей избыточностью в отношении показателей крана.
По другому аспекту настоящего изобретения привязка модели данных машины к модели данных строительного объекта может также использоваться для того, чтобы автоматически определять и/или автоматически проверять место установки строительной машины, в частности положение крана, относительно сооружаемого или, соответственно, обрабатываемого строительного объекта. Когда строительная машина выбрана, что может осуществляться вышеназванным автоматизированным образом с помощью описанного модуля выбора или, альтернативно, также вручную самим планировщиком, модуль определения положения на основании релевантных данных машины, которые считываются из модели строительной машины и, например, могут включать в себя дальность действия и/или высоту рабочего хода и/или допускающую столкновение и/или рабочую область строительной машины, а также на основании релевантных данных строительного объекта, которые считываются из модели данных строительного объекта и, например, могут включать в себя размеры и/или контуры строительного объекта и/или топографические данные стройплощадки и/или подъездные пути и/или станции доставки материалов, может автоматически определять надлежащее место установки для строительной машины. Альтернативно или дополнительно названный модуль определения положения или места установки на основании названных критериев может проверять, возможно, заданное вручную планировщиком положение строительных машин, в частности на предмет того, достаточна ли при определенном месте установки дальность действия или, соответственно, место работ строительной машины для выполняемых строительной машиной работ и/или возникнут ли столкновения рабочей области строительной машины с контурами строительного объекта и/или другими топографическими данными стройплощадки, такими как, например, деревья или соседние здания, чтобы затем при необх. освободить место установки строительной машины или предложить альтернативное место установки.
После успешного определения и/или проверки места установки машины BIM или, соответственно, модель данных строительного объекта может соответственно актуализироваться названным модулем определения места установки в отношении места установки.
В усовершенствовании изобретения модуль определения места установки на основании вышеназванной проверки на столкновение может также автоматически ограничивать рабочую область данной выбранной строительной машины и актуализировать модель данных строительного объекта установленными ограничениями рабочей области. Как еще будет поясняться, устройство управления строительной машины может соответственно адаптироваться или, соответственно, параметрироваться в отношении функции ограничения рабочей области.
Ниже изобретение поясняется подробнее на одном из предпочтительных примеров осуществления и соответствующих чертежах. На чертежах показано:
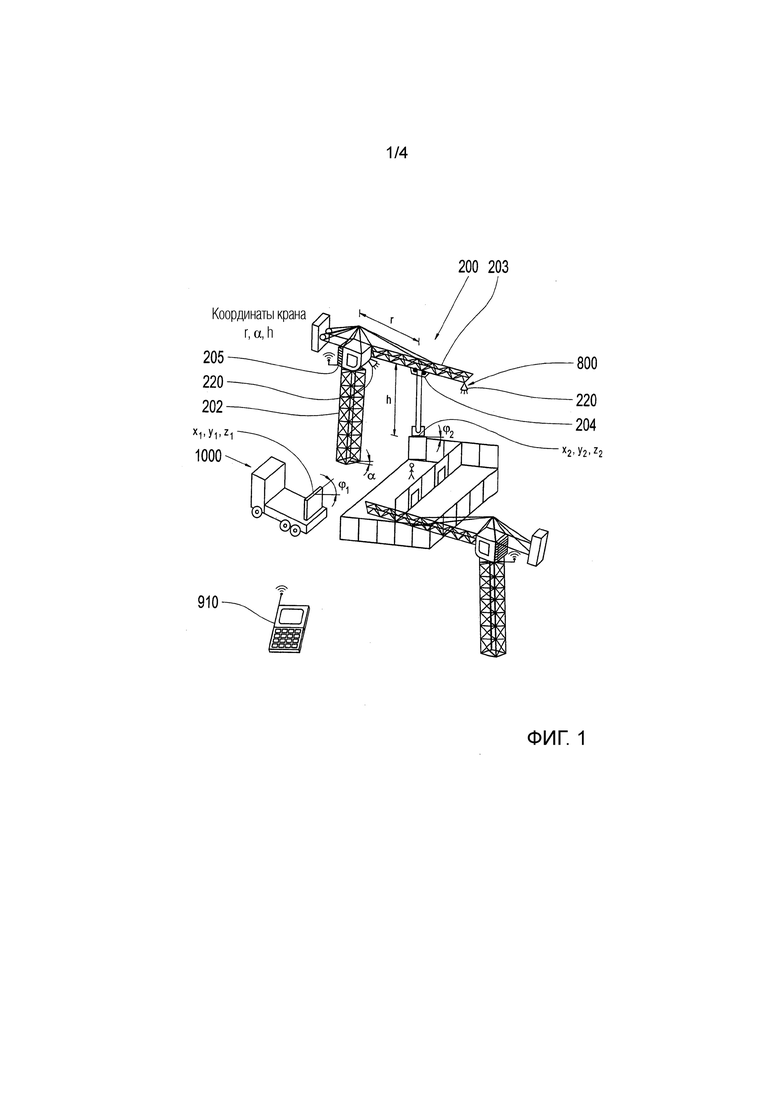
фиг. 1: схематичное изображение строительной машины в виде крана, управление которой привязано к компьютеру управления стройплощадкой, имеющему доступ к модели данных строительного объекта, и автоматизированным образом маневрирует грузом от осуществляющего доставку грузовика к положению монтажа на сооружаемом здании;
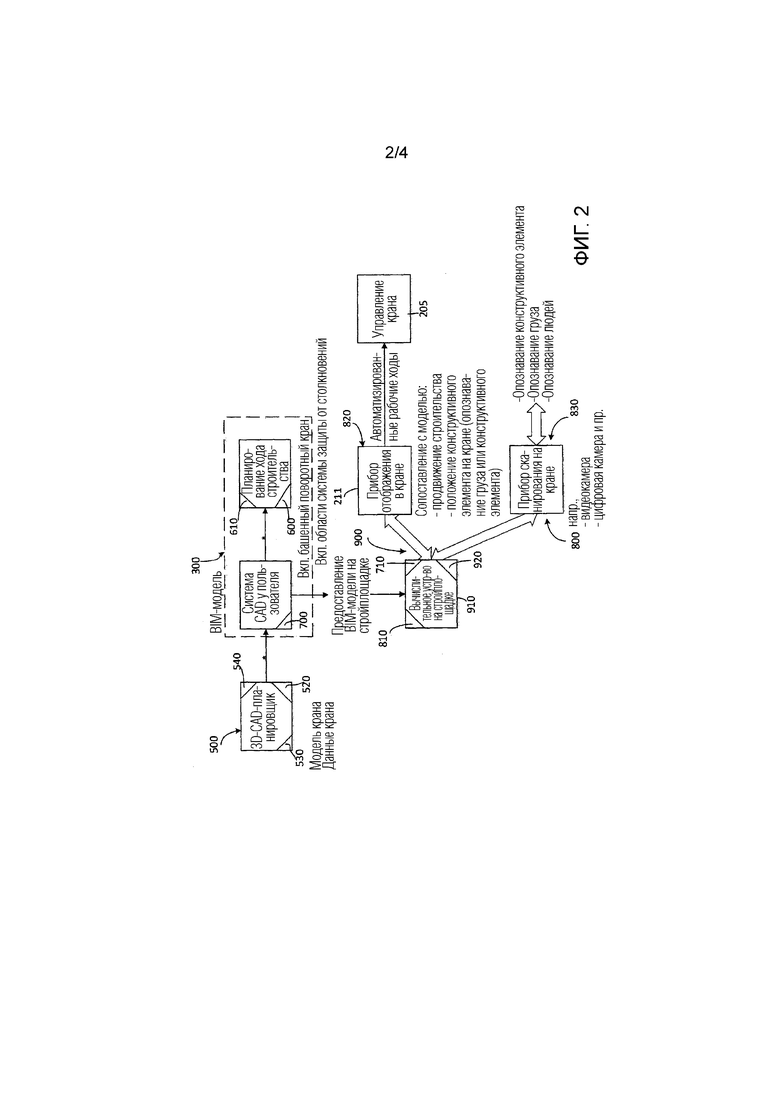
фиг. 2: схематичное структурное изображение привязки управления крана с фиг. 1 к модели данных строительного объекта через названный компьютер управления стройплощадкой, а также привязки модели данных машины, которая содержит характеристики крана, к модели данных строительного объекта для поддержки планирования строительства;
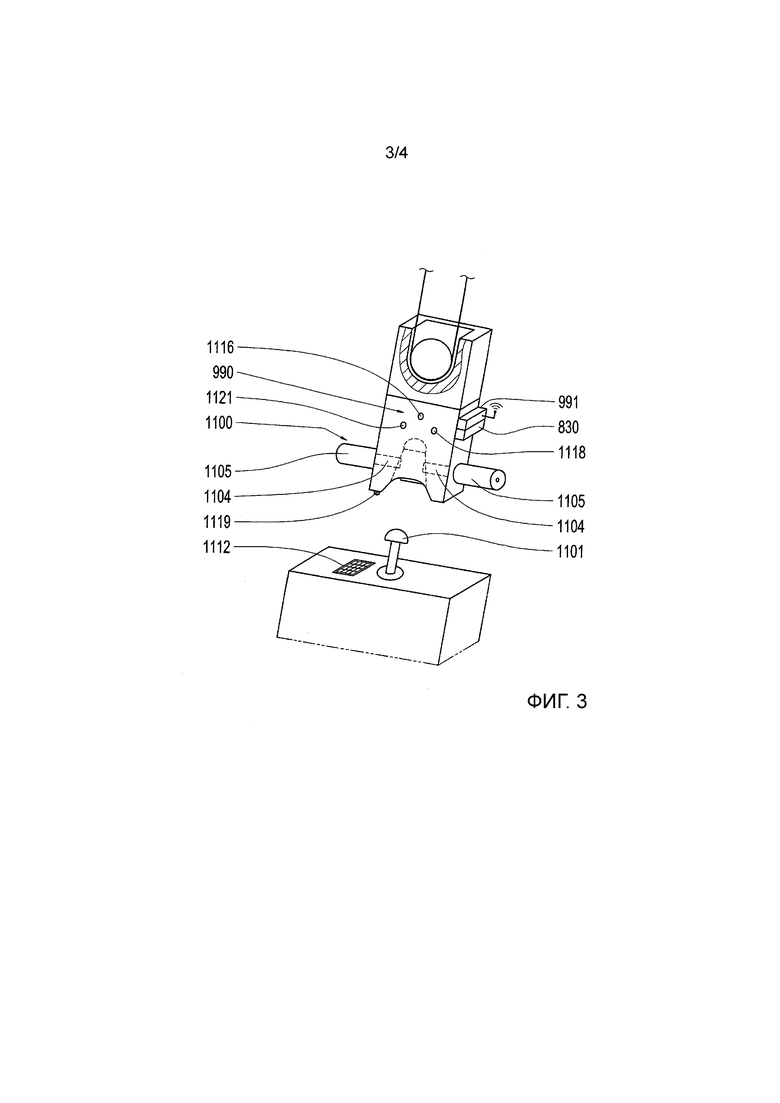
фиг. 3: схематичное изображение в перспективе грузозахватного средства крана с фиг. 1 для приема конструктивного элемента посредством сцепки, при этом часть сцепки, находящаяся на грузовом крюке, и часть сцепки, находящаяся на конструктивном элементе, показаны в еще не сцепленном положении сближения, и
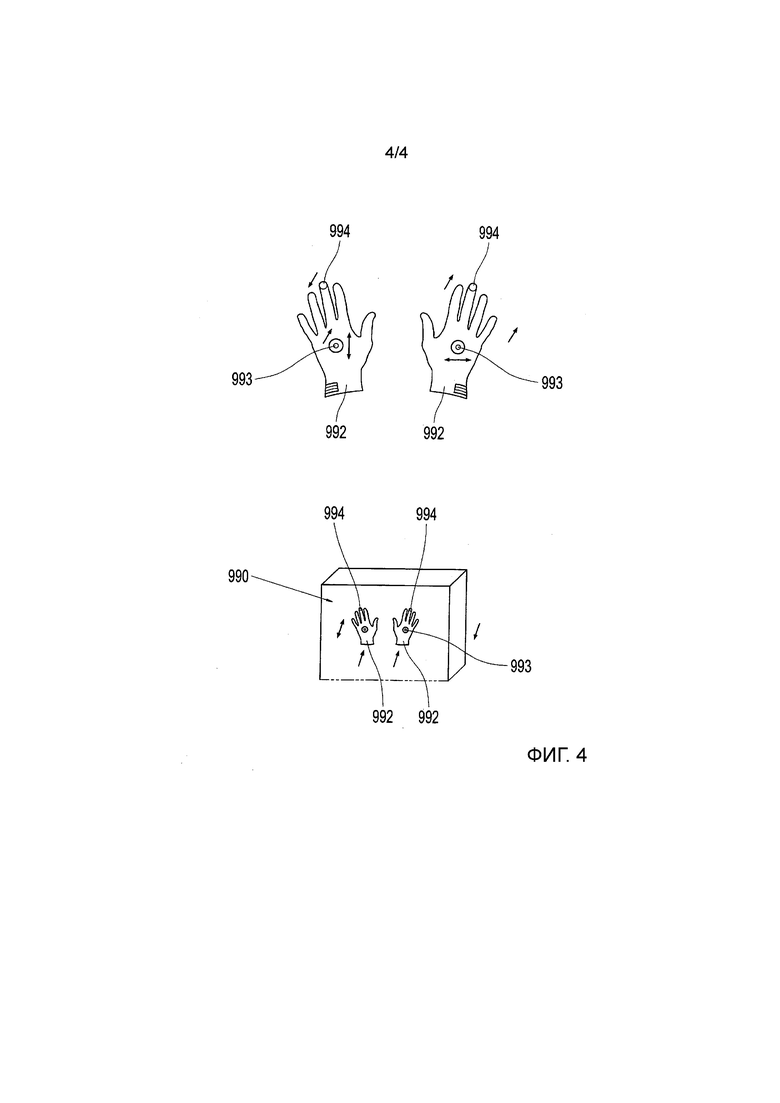
фиг. 4: схематичное изображение электронного модуля точного управления в виде электронного надеваемого блока, выполненного в виде перчатки, для точного направления движений грузового крюка крана с фиг. 1 путем нажатия рукой на перемещаемый конструктивный элемент.
Как показано на фиг. 1, кран 200, который поясняемым ниже образом привязан к модели данных 300 строительного объекта, может быть выполнен в виде башенного поворотного крана, на башне 202 которого установлена стрела 203, на которой с возможностью перемещения оперта каретка 204. Стрела 203 может вместе с башней 202 или же без башни 202, в зависимости от исполнения крана в виде крана с верхним или нижним поворотом, поворачиваться вокруг вертикальной оси, для чего собственно известным образом предусмотрен привод механизма вращения. Стрела 203 могла бы быть выполнена также с возможностью качания вверх и вниз вокруг горизонтальной поперечной оси, при этом мог бы быть предусмотрен надлежащий привод качания, например, в комбинации с оттяжкой стрелы крана. Названная каретка 204 может собственно известным образом перемещаться посредством лебедки для перемещения каретки или другого привода перемещения каретки.
Однако вместо показанного крана 200 мог бы также находить применение другой кран, например, в виде крана с телескопической стрелой, или же строительная машина другого типа, например, экскаватор, и привязываться к BIM или, соответственно, модели 300 данных строительного объекта.
Как показано на фиг. 2, кран 200 может учитываться уже на фазе планирования. Для этого модель 500 строительной машины, которая названным образом может получать цифровую информацию о разных строительных машинах, в частности разных кранах, включая кран 200 с фиг. 1, может привязываться к модели 200 данных строительного объекта. Названная модель 500 строительной машины может предоставляться в виде загружаемого инструмента или, соответственно, блока программного обеспечения, который имеет интерфейс, позволяющий привязывать модель 500 строительной машины к модели 300 данных строительного объекта, так что они обе могут поддерживать связь и обмениваться данными друг с другом.
С помощью привязки названной модели 500 данных машины может упрощаться процесс планирования. В частности, уже поясненным подробнее образом могут производиться или, соответственно, определяться выбор крана, размещение крана относительно возводимого строительного объекта и рабочие области крана 200. Для этого в модель 500 строительной машины и/или в модель 300 данных строительного объекта могут быть интегрированы надлежащие блоки программного обеспечения и/или аппаратного обеспечения, в частности модуль 520 выбора машины, модуль 530 определения места установки, модуль 700 определения возможности столкновения и модуль 710 регулирования рабочей области.
Как показано на фиг. 2, сам кран 200 также привязан к модели 300 данных строительного объекта, а именно, через компьютер 910 управления стройплощадкой, который имеет доступ к названной модели данных строительного объекта. Чтобы предоставить на стройплощадке BIM или, соответственно, модель 300 данных строительного объекта, компьютер 910 управления стройплощадкой, который может размещаться на стройплощадке или, соответственно, в области сооружаемого строительного объекта, может быть онлайн привязан к серверу, на котором предоставлена BIM или, соответственно, модель 300 данных строительного объекта. Но предпочтительно на компьютере управления стройплощадкой может быть также сохранена копия BIM или, соответственно, модели 300 данных строительного объекта, которая может циклически или непрерывно синхронизироваться с оригинальной редакцией модели 300 данных строительного объекта. Тем самым могут сокращаться длинные пути данных и сдвиг во времени и реализовываться взаимодействие без сдвига или, соответственно, с небольшим сдвигом во времени между моделью 300 данных строительного объекта и краном 200, так как устройство 205 управления крана может получать доступ прямо к компьютеру 910 управления стройплощадкой и имеющейся там локальной копии модели 300 данных строительного объекта, без необходимости передачи данных к удаленному, центральному BIM-серверу, имеющему возможные ограничения ширины диапазона пропускания. Последнее было бы, конечно, все же возможно.
Когда данные с крана 200 или, соответственно, его устройства 205 управления записываются в модель 300 данных строительного объекта, сначала они могут временно сохраняться в компьютере 910 управления стройплощадкой, причем затем путем синхронизации компьютера 910 управления стройплощадкой с центральным сервером и/или вычислительными серверными устройствами других участников, таких как, напр., плановое бюро или арендодатель машин, имеющиеся там версии модели 300 данных строительного объекта могут соответственно актуализироваться.
При привязке крана 200 к компьютеру 910 управления стройплощадкой или, соответственно, к предоставленной им модели 300 данных строительного объекта разные функции крана или, соответственно, вообще функции управления соответствующей строительной машины могут адаптироваться или, соответственно, параметрироваться в зависимости от цифровых данных из модели 300 данных строительного объекта. Для этого посредством показанного на фиг. 2 устройства 900 передачи данных соответствующая цифровая информация из модели 300 данных строительного объекта может передаваться крану 200. Названное устройство 900 передачи данных соединяет, в частности, компьютер 910 стройплощадки с устройством 205 управления крана 200.
Модуль 920 конфигурации управления, который может быть интегрирован в устройство 205 управления крана 200, а также может быть предусмотрен в компьютере 910 стройплощадки, предусмотрен для того, чтобы соответственно адаптировать названные функции управления устройства 205 управления крана 200. В частности, этот модуль 920 конфигурации управления может адаптировать функцию ограничения рабочей области крана 200, которая может быть имплементирована в его устройство 205 управления, посредством цифровых данных из модели 300 данных строительного объекта к разным фазам строительства и растущим соответственно этому стенам строительного объекта и препятствиям.
Независимо от такой адаптации ограничения рабочей области, привязка крана к компьютеру 910 управления стройплощадкой и предоставляемой им модели 300 данных строительного объекта может также использоваться для реализации автоматизированного контроля фаз строительства. Для этого, с одной стороны, посредством надлежащего регистрирующего устройства 800 может определяться фактическое состояние строительного объекта, при этом названное регистрирующее устройство 800 может быть выполнено принципиально различным образом. Например, регистрирующее устройство 800 может включать в себя по меньшей мере одну камеру и/или надлежащий сенсор с выводом изображения, например, в виде смонтированной на кране 200 камеры 220. Предназначенное для создаваемых изображений устройство обработки изображений может регистрировать специфические характеристики, например, высоту строительного объекта, застроенную площадь в горизонтальной проекции, контуры очертаний или тому подобное, которые характеризуют продвижение строительства. Альтернативно или дополнительно таким камерам или сенсорам с выводом изображения могут быть также предусмотрены другие средства регистрации, такие как, например, сканер или RFID-считыватель, чтобы регистрировать, смонтированы ли уже определенные конструктивные элементы на строительном объекте или нет. Такой сканер или RFID-считыватель может быть, например, установлен на крюке 208 крана, или же применяться в виде мобильного устройства, посредством которого могут вручную сканироваться смонтированные конструктивные элементы.
Затем зарегистрированное регистрирующим устройством 800 фактическое состояние строительного объекта сравнивается модулем 810 определения состояния фаз строительства, который, например, может быть имплементирован в компьютер 910 стройплощадки, с цифровой информацией из модели 300 данных строительного объекта, чтобы из этого сравнения определить соответствующую фазу строительства.
На базе определенной фазы строительства кран 200 может выполнять разные функции. Например, уже полезно, когда данная достигнутая фаза строительства отображается на устройстве отображения на кране 200, будь то в его кабине 206 крановщика или на пульте 2 управления устройства дистанционно управления.
Однако с помощью модуля 920 конфигурации управления, который может быть имплементирован в компьютер 910 стройплощадки, а также, в частности, в устройство 205 управления крана 200, на кране 200 могут также настраиваться дополнительные функции управления. Например, на названном приборе отображения на кране или его устройстве дистанционного управления может отображаться виртуальное изображение каждой следующей выполняемой строительной машиной рабочей задачи, например, таким образом, что на виртуальном изображении строительного объекта на его данной фазе строительства отображается соответственно следующий монтируемый конструктивный элемент и высвечивается его положение монтажа на строительном объекте. Альтернативно или дополнительно на изображении может также высвечиваться путь перемещения.
Еще более предпочтительным образом краном 200 могут также выполняться автоматизированные рабочие ходы, в частности на базе вышеназванного контроля фаз строительства и связанного с ним определения следующего рабочего шага.
Когда, например, посредством грузовика 1000 на стройплощадку доставляется конструктивный элемент, что, например, может быть заключено из модели 300 данных строительного объекта или ее временного графика путем соответствующего ввода, компьютер 910 управления стройплощадкой может информировать устройство 205 управления крана 200, в частности также о положении выгрузки, в котором грузовик 1000 предписанным образом останавливается для выгрузки конструктивного элемента. На фиг. 1 в этой связи показаны координаты X1, Y1 и Z1, которые указывают положение конструктивного элемента в месте выгрузки грузовика 1000. Дополнительно показанный на фиг. 1 угол ϕ1 определяет угловую ориентацию конструктивного элемента относительно сооружаемого строительного объекта, что, например, простым образом может задаваться тем, что грузовик должен принимать предопределенное положение отгрузки, которое известно BIM 300, и конструктивный элемент уложен на грузовике 100 в определенной ориентации. Альтернативно или дополнительно может быть предусмотрено надлежащее регистрирующее устройство, например, в виде камеры 220, которое, например, установлено на стреле 203 крана 200 и может смотреть вниз, чтобы таким образом посредством устройства аналитической обработки изображений можно было определять ориентацию конструктивного элемента.
Когда компьютер 910 управления стройплощадкой информирует устройство 205 управления крана 200 о доставке, устройство 205 управления может перемещать кран 200 так, чтобы его грузовой крюк двигался к грузовику 1000 и находящемуся на нем конструктивному элементу.
Предпочтительно грузовой крюк крана 200 может располагать самосрабатывающим сцепным средством, например, таким образом, чтобы грузовой крюк двигался к стропу, на котором грузозахват на конструктивном элементе сцепляется с грузовым крюком, как еще будет поясняться подробнее. Альтернативно или дополнительно точная юстировка грузового крюка относительно принимаемого конструктивного элемента может также осуществляться уже поясненным подробнее выше образом с помощью находящегося на грузовом крюке модуля 990 управления перемещением, который может включать отвечающее за процесс зацепления положение на грузовике 100 или, соответственно, на его грузовой платформе, когда грузовой крюк крана 200 автоматизированным образом приблизился к положению X1, Y1, Z1, ϕ1.
При этом средства регистрации на грузовом крюке могут также проверять, является ли находящийся на грузовике конструктивный элемент действительно тем конструктивным элементом, который должен монтироваться, при этом, например, считывается RFID-метка, штриховой код или тому подобное, как уже подробнее пояснялось выше.
Для этого может быть предусмотрено регистрирующее устройство 830, посредством которого может регистрироваться находящийся в приемной или, соответственно, рабочей области крана 200 конструктивный элемент, в частности на предмет того, является ли он тем конструктивным элементом, который должен монтироваться в следующем рабочем шаге. Названное регистрирующее устройство 830 может, например, включать в себя сканер штрихового кода или RFID-считыватель, который может быть установлен на крюке крана. Но разумеется, что могут применяться и другие средства регистрации для идентификации принимаемого конструктивного элемента.
Если таким образом констатируется, что на крюк 208 крана принят конструктивный элемент, который должен монтироваться в следующем рабочем шаге, названный модуль 920 конфигурации управления может заставить устройство 205 управления крана на базе цифровой информации из модели 300 данных строительного объекта выполнить автоматизированный рабочий ход для переноса конструктивного элемента в предписанное место монтажа, в частности в положение X2, Y2, Z2 монтажа с необходимой там угловой ориентацией ϕ2. Для этого кран 200 может поворачиваться, и его каретка перемещаться, а также тоже поворачиваться.
На фиг. 3 в качестве примера показано грузозахватное средство 1100 крана 200, которое позволяет автоматически зацеплять груз. Например, грузозахватное средство 1100 может быть выполнено в виде сцепки с геометрическим замыканием, которая может с геометрическим замыканием захватывать выполненный подходящим к ней образом захватный элемент 1101 на конструктивном элементе, например, грибовидную захватную головку. Как показано на фиг. 3, для сцепных элементов, например, в виде задвижек 1104, может быть предназначены исполнительные элементы для приведения их в действие, в частности открытия и/или закрытия, при этом названные исполнительные элементы 1105 могут приводиться в действие за счет сторонней энергии, например, со стороны управления крана, но с другой стороны, могут также предпочтительно приводиться в действие вручную.
Названное грузозахватное средство 1100 может иметь сенсорику 1119 для точного расположения, посредством которой могут регистрироваться расположенные на конструктивном элементе маркировочные элементы 1112. Названные средства 1119 регистрации вместе с маркировками 1112 на конструктивном элементе могут обеспечивать полностью автоматизированный, точный подвод к положению сцепки или, соответственно, положению приема груза.
Но альтернативно или дополнительно также уже поясненным выше образом возможна работа с помощью модуля 990 управления перемещением на грузовом крюке или, соответственно, грузозахватном средстве для перемещения грузозахватного средства 1100 точно в желаемое положение и ориентацию. На фиг. 3 указаны некоторые элементы 1116, 1118 и 1121 обслуживания, посредством которых уже поясненным выше образом возможна точная юстировка движений грузового крюка или, соответственно, грузозахватного средства. Названные элементы 1116, 1118 и 1121 обслуживания могут, например, представлять собой нажимные кнопки, движки или вращающиеся ручки, оси движения которых задают соответствующие установочные движения крюка крана и их направления. Как показано на фиг. 3, модуль 990 управления перемещением может иметь устройство 991 передачи и/или приема для поддержания связи с устройством 205 управления крана.
Как показано на фиг. 4, названный модуль 990 управления перемещением может также включать в себя элементы обслуживания, которые интегрированы в перчатку оператора машины. Например, такие перчатки 992 могут включать в себя сенсоры 993 и 994, чувствительные к нажатию и/или направлению, которые могут быть интегрированы в подушечки или кончики пальцев и поверхность ладони данной перчатки 992.
При касании перчатками 992 поверхностей перемещаемого конструктивного элемента и/или поверхностей грузозахватного средства 1100 посредством названных сенсоров 993 и 994 может регистрироваться, в каком направлении перчатки 992 нажимают, тянут или вращают конструктивный элемент или, соответственно, грузозахватное средство, чтобы затем посредством устройства 205 управления крана выполнять соответствующие движения перемещения. При необходимости на грузозахватном средстве 1100 и/или на перемещаемом конструктивном элементе могут быть расположены взаимодействующие с перчатками 992 части поверхности, которые вместе с сенсорами 992 и 993 и 994 позволяют лучше регистрировать направление нажатия и/или направление движения. Альтернативно или дополнительно на перемещаемом конструктивном элементе может быть также размещена маркировка положения, которая задает положение касания или, соответственно, захвата перчаток 992, так что устройству управления по ориентации конструктивного элемента известно, в каком направлении работают перчатки 992 и их сенсоры 993 и 994.
В частности, разным сенсорам 993 и 994 перчаток 992 могут быть также присвоены разные функции. Как показано на фиг. 4, например, сенсору 992 поверхности ладони правой перчатки может быть присвоена функция «горизонтальное перемещение справа налево», в то время как сенсору 992 поверхности ладони левой перчатки может быть присвоена функция «вертикальное перемещение». Чтобы можно было управлять перемещением перпендикулярно плоскости касания, соответственно плоскости чертежа фиг. 4, например, сенсор 994 пальца левой перчатки может сигнализировать приближение к оператору, а сенсор 994 пальца правой перчатки 992 удаление. Разумеется, возможны другие распределения сенсоров.
Как указывает фиг. 2, посредством надлежащих сканирующих приборов или, соответственно, регистрирующих устройств могут также реализовываться другие функции опознавания, например, опознавания людей, в частности на предмет того, находятся ли люди на намеченном пути перемещения груза автоматизированного рабочего хода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОЕКТИРОВАНИЯ И/ИЛИ УПРАВЛЕНИЯ, И/ИЛИ ИМИТАЦИИ РАБОТЫ СТРОИТЕЛЬНОЙ МАШИНЫ | 2017 |
|
RU2753165C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ И/ИЛИ АВТОПОГРУЗЧИКА | 2017 |
|
RU2719048C1 |
| КРАН | 2017 |
|
RU2734966C2 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2017 |
|
RU2736896C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ И/ИЛИ АВТОПОГРУЗЧИКА | 2017 |
|
RU2741456C2 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2017 |
|
RU2754118C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДНЯТИЯ ГРУЗА | 2018 |
|
RU2768693C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОЕКТАМИ ДЛЯ ОБЕСПЕЧЕНИЯ ОПТИМАЛЬНОГО ВЗАИМОДЕЙСТВИЯ С ЦИФРОВЫМИ МОДЕЛЯМИ | 2014 |
|
RU2644506C2 |
| ПОСТ УПРАВЛЕНИЯ КРАНОМ, ЭКСКАВАТОРОМ И Т.П. | 2017 |
|
RU2737565C2 |
| МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ ИЛИ СРЕДСТВА НАПОЛЬНОГО ТРАНСПОРТА | 2017 |
|
RU2730796C2 |
Изобретение относится к строительной технике, в частности к средствам управления рабочим оборудованием строительной машины. Техническим результатом является обеспечение возможности эффективного управления строительной машиной, за счет улучшенной привязки к BIM-моделям. Предложена строительная машина, в частности кран (200) или экскаватор, имеющая устройство (205) управления строительной машины для управления рабочими агрегатами строительной машины и соединяемое с компьютером (910) управления стройплощадкой устройство (900) передачи данных для приема и обработки цифровой информации из модели (300) данных строительного объекта, к которой имеет доступ компьютер (910) управления стройплощадкой, и модуль (920) конфигурации управления для влияния по меньшей мере на одну функцию управления устройства (205) управления строительной машины в зависимости от принятой цифровой информации из модели (300) данных строительного объекта. Причем модуль (920) конфигурации управления выполнен для того, чтобы в зависимости от цифровой информации из модели (300) данных строительного объекта, в зависимости от определенной фазы строительства на устройстве (820; 211) отображения, которое расположено на строительной машине, отображать виртуальное изображение строительного объекта в соответствии с определенным фактическим состоянием и/или виртуальное изображение следующей выполняемой строительной машиной рабочей задачи, и/или в зависимости от цифровых данных из модели (300) данных строительного объекта отображать виртуальное изображение следующего обрабатываемого конструктивного элемента и положение монтажа названного конструктивного элемента на строительном объекте. 3 н. и 29 з.п. ф-лы, 4 ил.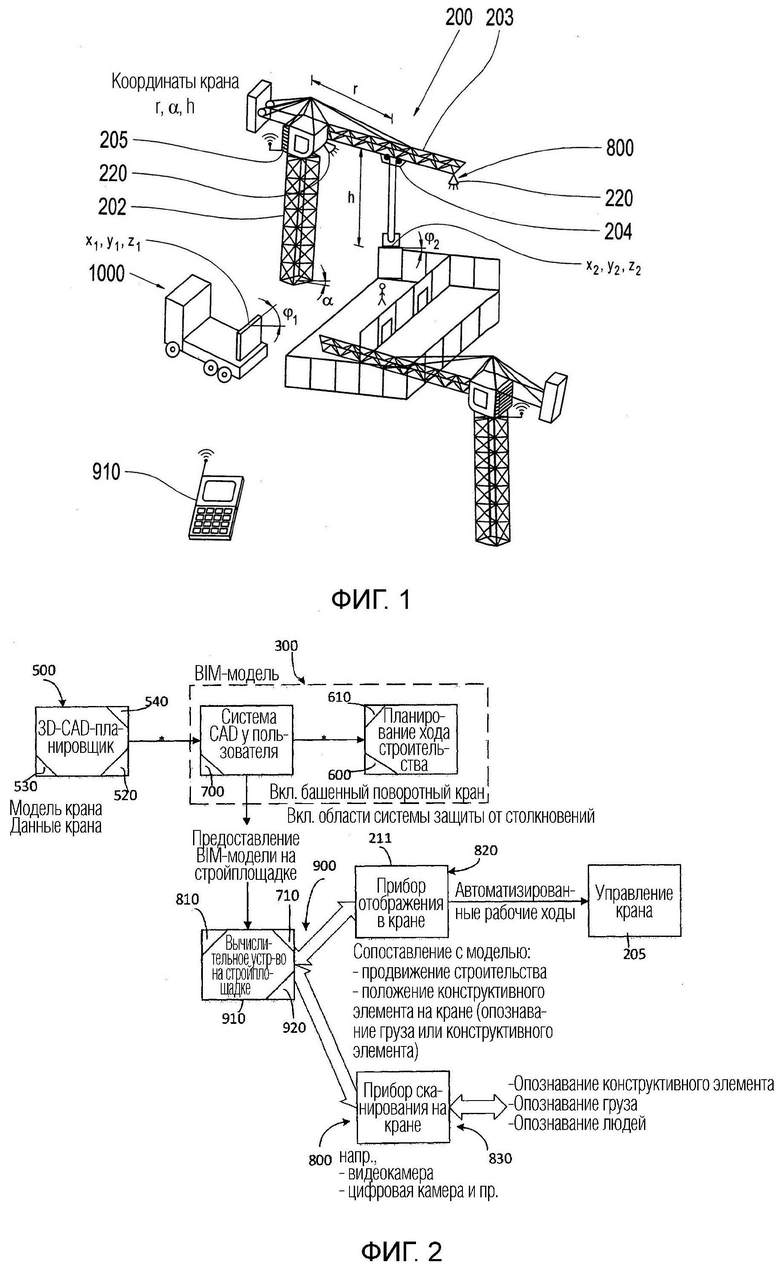
1. Строительная машина, в частности кран (200) или экскаватор, имеющая устройство (205) управления строительной машины для управления рабочими агрегатами строительной машины и соединяемое с компьютером (910) управления стройплощадкой устройство (900) передачи данных для приема и обработки цифровой информации из модели (300) данных строительного объекта, к которой имеет доступ компьютер (910) управления стройплощадкой, и модуль (920) конфигурации управления для влияния по меньшей мере на одну функцию управления устройства (205) управления строительной машины в зависимости от принятой цифровой информации из модели (300) данных строительного объекта,
причем модуль (920) конфигурации управления выполнен для того, чтобы
- в зависимости от цифровой информации из модели (300) данных строительного объекта, в зависимости от определенной фазы строительства на устройстве (820; 211) отображения, которое расположено на строительной машине, отображать виртуальное изображение строительного объекта в соответствии с определенным фактическим состоянием и/или виртуальное изображение следующей выполняемой строительной машиной рабочей задачи, и/или
- в зависимости от цифровых данных из модели (300) данных строительного объекта отображать виртуальное изображение следующего обрабатываемого конструктивного элемента и положение монтажа названного конструктивного элемента на строительном объекте.
2. Строительная машина по п.1, причем предусмотрен модуль (950) локализации конструктивного элемента для локализации принимаемого строительной машиной конструктивного элемента на стройплощадке на основании цифровой информации из модели (300) данных строительного объекта компьютера (910) управления стройплощадкой, при этом устройство (205) управления строительной машины имеет модуль подвода для автоматизированного подвода конструктивного элемента, локализованного таким образом, на основании координат положения конструктивного элемента, предоставленных компьютером (910) управления стройплощадкой.
3. Строительная машина по одному из предыдущих пунктов, причем предусмотрено регистрирующее устройство (830) для регистрации и/или идентификации находящегося в приемной и/или рабочей области строительной машины конструктивного элемента, при этом устройство (900) передачи данных выполнено для того, чтобы в зависимости от зарегистрированного и/или идентифицированного конструктивного элемента предоставлять из модели (300) данных строительного объекта цифровую информацию, касающуюся обработки зарегистрированного конструктивного элемента, устройству (205) управления строительной машины, при этом модуль (920) конфигурации управления выполнен для того, чтобы автоматически выполнять обрабатывающий шаг, касающийся зарегистрированного конструктивного элемента, на базе предоставленной моделью (300) данных строительного объекта цифровой информации.
4. Строительная машина по предыдущему пункту, причем цифровая информация из модели (300) данных строительного объекта включает в себя данные положения, которые указывают место назначения конструктивного элемента, и/или данные пути перемещения, которые указывают путь перемещения конструктивного элемента, при этом модуль (920) конфигурации управления выполнен для того, чтобы автоматически поднимать и/или перемещать строительную машину в зависимости от названных данных положения и/или данных пути перемещения.
5. Строительная машина по одному из двух предыдущих пунктов, при этом регистрирующее устройство (830) имеет камеру и/или сенсор с выводом изображения и/или сканер штрихового кода и/или RFID-считыватель.
6. Строительная машина по одному из предыдущих пунктов, при этом грузозахватное средство для приема конструктивного элемента имеет самосрабатывающую и/или приводимую в действие за счет сторонней энергии сцепную часть, которая может автоматически разъединяться и/или закрываться устройством (205) управления строительной машины.
7. Строительная машина по одному из предыдущих пунктов, причем устройство (205) управления строительной машины выполнено для того, чтобы автоматически на основании данных положения от компьютера (910) управления стройплощадкой перемещать принятый груз от пункта (X1, Y1, Z1, ϕ1) приема груза к пункту (X2, Y2, Z2, ϕ2) монтажа, соответственно, опускания, при этом названные данные положения предпочтительно включают в себя координаты (X, Y, Z) положения в трехмерной системе координат и угловую координату (ϕ), которая указывает ориентацию конструктивного элемента вокруг вертикальной оси вращения.
8. Строительная машина по одному из предыдущих пунктов, причем предусмотрено устройство вращения для поворота грузозахватного средства строительной машины вокруг вертикальной оси вращения, в частности вращающаяся каретка и/или вращающееся грузозахватное средство, при этом устройство (205) управления строительной машины выполнено для того, чтобы приводить в действие устройство вращения на основании цифровой информации от компьютера (910) управления стройплощадкой.
9. Строительная машина по одному из предыдущих пунктов, причем предусмотрен модуль (990) управления перемещением, который может размещаться на грузозахватном средстве строительной машины и/или на помещенном на нем, перемещаемом конструктивном элементе, и имеет по меньшей мере один элемент (1116, 1118, 1121) обслуживания, ось привода которого совпадает с осью перемещения строительной машины.
10. Строительная машина по предыдущему пункту, причем модуль (990) управления перемещением интегрирован в предназначенную предписанным образом для ношения на теле оператора машины надеваемую часть, которая самофиксирующимся образом может надеваться на конечность тела.
11. Строительная машина по предыдущему пункту, причем по меньшей мере один элемент (993, 994) обслуживания модуля (990) управления перемещением интегрирован в перчатку (992), которой оператор машины предписанным образом воздействует на грузозахватное средство строительной машины и/или помещенный на нем, перемещаемый конструктивный элемент.
12. Строительная машина по одному из двух предыдущих пунктов, причем модуль (990) управления перемещением выполнен для беспроводной связи с устройством (205) управления строительной машины.
13. Строительная машина по одному из предыдущих пунктов, причем модуль (920) конфигурации управления выполнен для того, чтобы изменять учитываемую устройством (205) управления строительной машины функцию ограничения рабочей области в зависимости от цифровой информации из модели (300) данных строительного объекта.
14. Строительная машина по предыдущему пункту, причем модуль (920) конфигурации управления выполнен для того, чтобы автоматически актуализировать и/или автоматически циклически или непрерывно адаптировать функцию ограничения рабочей области в зависимости от продвижения строительства к сооружаемому и/или обрабатываемому строительному объекту с учетом цифровой информации из модели данных строительного объекта.
15. Строительная машина по одному из двух предыдущих пунктов, причем предусмотрен модуль (700) определения возможности столкновения для сопоставления параметров строительной машины, которые характеризуют место установки и/или рабочую область, с данными строительного объекта из модели (300) данных строительного объекта, которые характеризуют контуры строительного объекта и/или топографические контуры окрестности строительного объекта, и модуль (920) конфигурации управления выполнен для того, чтобы на базе названного сопоставления адаптировать функцию ограничения рабочей области.
16. Строительная машина по одному из предыдущих пунктов, причем предусмотрено по меньшей мере одно регистрирующее устройство (800), предпочтительно включающее в себя по меньшей мере одну камеру (210, 220), и/или сенсор с выводом изображения, и/или сканер, и/или RFID-считыватель, для регистрации фактического состояния строительного объекта, в частности наличие определенных частей строительного объекта, при этом предусмотрен модуль (810) определения фаз строительства для сравнения зарегистрированного фактического состояния строительного объекта с цифровой информацией из модели (300) данных строительного объекта и определения фазы строительства в зависимости от этого сравнения, при этом устройство (900) передачи данных выполнено для того, чтобы предоставлять определенную цифровую информацию из модели (300) данных строительного объекта в зависимости от определенной фазы строительства устройству (205) управления строительной машины.
17. Строительная машина по предыдущему пункту, причем модуль (920) конфигурации управления выполнен для того, чтобы в зависимости от определенной цифровой информации из модели (300) данных строительного объекта, которая предоставляется строительной машине в зависимости от определенного продвижения строительства, отображать на устройстве (820; 211) отображения, которое расположено на строительной машине или пульте управления для дистанционного управления строительной машиной, виртуальное изображение строительного объекта в соответствии с определенным фактическим состоянием и/или виртуальное изображение следующей выполняемой строительной машиной рабочей задачи.
18. Строительная машина по предыдущему пункту, причем модуль (920) конфигурации управления выполнен для того, чтобы в зависимости от определенного фактического состояния строительного объекта отображать виртуальное изображение следующего обрабатываемого конструктивного элемента и положение монтажа названного конструктивного элемента на строительном объекте.
19. Способ управления строительной машиной, в частности краном (200), с применением модели (300) данных строительного объекта, которая содержит цифровую информацию о сооружаемом и/или обрабатываемом строительном объекте, отличающийся следующими шагами:
- предоставление цифровой информации из модели (300) данных строительного объекта строительной машине, в частности крану (200);
- влияние по меньшей мере на одну функцию управления устройства (205) управления строительной машины в зависимости от предоставленной цифровой информации из модели (300) данных строительного объекта,
причем используют модуль (920) конфигурации управления для того, чтобы
- в зависимости от цифровой информации из модели (300) данных строительного объекта, в зависимости от определенной фазы строительства на устройстве (820; 211) отображения, которое расположено на строительной машине, отображать виртуальное изображение строительного объекта в соответствии с определенным фактическим состоянием и/или виртуальное изображение следующей выполняемой строительной машиной рабочей задачи, и/или
- в зависимости от цифровых данных из модели (300) данных строительного объекта отображать виртуальное изображение следующего обрабатываемого конструктивного элемента и положение монтажа названного конструктивного элемента на строительном объекте.
20. Способ по предыдущему пункту, при этом посредством регистрирующего устройства (830) автоматически регистрируется находящийся в приемной и/или рабочей области строительной машины конструктивный элемент, при этом в зависимости от зарегистрированного конструктивного элемента из модели (300) данных строительного объекта предоставляется цифровая информация, касающаяся обработки зарегистрированного конструктивного элемента, и при этом устройством (205) управления строительной машины автоматически выполняется обрабатывающий шаг, касающийся зарегистрированного конструктивного элемента, на базе предоставленной моделью (300) данных строительного объекта цифровой информации.
21. Способ по предыдущему пункту, причем предоставляется цифровая информация из модели (300) данных строительного объекта: данные положения, которые указывают место назначения конструктивного элемента, и/или данные пути перемещения, которые указывают путь перемещения конструктивного элемента, и устройством (205) управления строительной машины конструктивный элемент автоматически поднимается и/или перемещается в зависимости от названных данных положения и/или данных пути перемещения.
22. Способ по одному из предыдущих пунктов, при этом посредством по меньшей мере одного регистрирующего устройства (800), предпочтительно включающего в себя по меньшей мере одну камеру (210, 220), регистрируется фактическое состояние строительного объекта, в частности наличие определенных частей строительного объекта, при этом модулем (810) определения продвижения строительства зарегистрированное фактическое состояние строительного объекта сравнивается с цифровой информацией из модели (300) данных строительного объекта, и в зависимости от этого сравнения определенная цифровая информация из модели (300) данных строительного объекта предоставляется устройству (205) управления строительной машины.
23. Способ по предыдущему пункту, причем в зависимости от определенной цифровой информации из модели (300) данных строительного объекта, которая предоставляется строительной машине в зависимости от определенного продвижения строительства, на устройстве (820; 211) отображения, которое расположено на строительной машине или пульте (2) управления для дистанционного управления строительной машиной, представляется виртуальное изображение строительного объекта в соответствии с определенным фактическим состоянием и/или виртуальное изображение следующей выполняемой строительной машиной рабочей задачи.
24. Способ по предыдущему пункту, причем в зависимости от определенного фактического состояния строительного объекта создается виртуальное изображение следующего обрабатываемого конструктивного элемента и положения монтажа названного конструктивного элемента на строительном объекте в зависимости от цифровой информации из модели (300) данных строительного объекта.
25. Способ по одному из предыдущих пунктов, при этом выполняются следующие шаги:
- автоматический выбор строительной машины (200), надлежащей для сооружения и/или обработки строительного объекта (400), на основании модели (300) данных строительного объекта, при этом для названного автоматического выбора выполняются следующие шаги:
- предоставление модели (500) данных машины, которая содержит цифровую информацию о разных моделях строительных машин;
- автоматическая идентификация релевантной информации из модели (300) данных строительного объекта на основании критериев, которые задаются моделью (500) данных машины и касаются параметров машины, по которым различаются разные модели строительных машин;
- автоматическое сравнение идентифицированной информации из модели (300) данных строительного объекта с параметрами машины разных строительных машин из модели (500) данных машины; и
- автоматический выбор надлежащей строительной машины на основании названного сравнения.
26. Способ по предыдущему пункту, причем при вышеназванном шаге идентификации релевантной информации из модели (300) данных строительного объекта считывается по меньшей мере одна информация из следующих:
высота строительного объекта, вес самого тяжелого передвигаемого конструктивного элемента, площадь и/или протяженность поперечного сечения строительного объекта в вертикальной проекции и максимальное расстояние между станцией доставки конструктивных элементов и местом назначения конструктивного элемента, и
при этом при вышеназванном сравнении указанная по меньшей мере одна считанная информация из модели (300) данных строительного объекта сравнивается с параметрами машины из модели (500) данных машины, которые содержат по меньшей мере одну информацию из следующих: высота рабочего хода машины, максимальный поднимаемый вес и дальность действия машины.
27. Способ по одному из предыдущих пунктов, при этом выполняются следующие шаги:
- определение положения установки и/или проверка определенного положения установки выбранной строительной машины относительно сооружаемого и/или обрабатываемого строительного объекта с применением цифровой информации из модели (300) данных строительного объекта, причем при определении и/или проверке рабочего положения выполняются следующие шаги:
- автоматическая идентификация релевантной информации из модели (300) данных строительного объекта и релевантной информации из модели (500) данных машины, при этом информация из модели (300) данных строительного объекта включает в себя по меньшей мере размеры строительного объекта, а информация из модели (500) данных машины – по меньшей мере рабочую область выбранной строительной машины; и
- автоматическое сопоставление рабочей области строительной машины с контурами строительного объекта для проверки достаточной дальности действия и/или возможных столкновений.
28. Способ по предыдущему пункту, при этом рабочая область выбранной строительной машины на основании вышеназванной проверки на столкновение автоматически ограничивается, и модель (300) данных строительного объекта актуализируется установленными ограничениями рабочей области.
29. Способ по предыдущему пункту, причем учитываемая устройством (205) управления строительной машины функция ограничения рабочей области изменяется модулем (710) регулирования ограничения рабочей области в зависимости от цифровой информации из модели (300) данных строительного объекта.
30. Способ по предыдущему пункту, причем функция ограничения рабочей области автоматически актуализированно адаптируется в зависимости от продвижения строительства на сооружаемом и/или обрабатываемом строительном объекте с учетом цифровой информации из модели (300) данных строительного объекта.
31. Способ по одному из двух предыдущих пунктов, причем модулем (700) определения возможности столкновения параметры машины строительной машины, которые характеризуют ее место установки и/или рабочую область, взаимно сопоставляются с данными строительного объекта из модели (300) данных строительного объекта, которые характеризуют контуры строительного объекта и/или топографические контуры окрестностей строительного объекта, при этом на базе названного сопоставления функция ограничения рабочей области адаптируется модулем (710) регулирования ограничения рабочей области.
32. Компьютер управления стройплощадкой, причем предусмотрены следующие компоненты:
- устройство (900) передачи данных для предоставления цифровой информации из модели (300) данных строительного объекта строительной машине по п.1;
- модуль (920) конфигурации управления для влияния по меньшей мере на одну функцию управления устройства (205) управления указанной строительной машины в зависимости от предоставленной цифровой информации из модели (300) данных строительного объекта.
| US 2013345857 A1, 26.12.2013 | |||
| US 2011029098 A1, 03.02.2011 | |||
| Триер | 1937 |
|
SU58111A1 |
| 0 |
|
SU157928A1 | |
| US 2013299440 A1, 14.11.2013 | |||
| US 2010070179 A1, 18.03.2010 | |||
| US 6845311 B1, 18.01.2005. | |||

