1. Область техники
Настоящие примеры относятся к системам и способам для выполнения фильтрации сигналов (например, к LTP-постфильтру и/или префильтру).
2. Уровень техники
Предшествующий уровень техники включает в себя следующие публикации:
[1] A. T. Hill и A. Ilchmann, «Экспоненциальная устойчивость линейных систем с переменными параметрами», IMA J Numer Anal, pp. 865-885, 2011.
[2] 3GPP TS 26.090, Адаптивный Многочастотный (AMR) речевой кодек; Функции транскодирования.
[3] 3GPP TS 26.445, Кодек для Расширенных Речевых Услуг (EVS); Подробное алгоритмическое описание.
[4] 3GPP TS 26.190, Адаптивный Многочастотный - Широкополосный (AMR-WB) речевой кодек; Функции транскодирования.
[5] 3GPP TS 26.290, Расширенный Адаптивный Многочастотный - Широкополосный (AMR-WB+) кодек; Функции транскодирования.
[6] B. Edler, C. Faller и G. Schuller, «Кодирование воспринимаемых аудиосигналов с помощью линейного префильтра и постфильтра с изменяющимися во времени параметрами», в AES 109th Convention, Los Angeles, 2000.
[7] A. Gray и J. Markel, «Синтез цифровых решетчатых и лестничных фильтров», IEEE Transactions on Аудио and Electroacoustics, vol. vol. 21, no. no. 6, pp. 491-500, 1973.
[8] M. P. Lamoureux, S. Ismail и G. F. Margrave, «Устойчивость переменных во времени фильтров», CREWES Research Report - Volume 19, 2007.
[9] P. J. Wilson и H. Chhatwal, «Адаптивный кодер с предсказанием, содержащий устройство долговременного прогноза», Патент США 5,012,517, 30 апреля 1991.
[10] M. Tsushima, Y. Nakatoh and T. Norimatus, «Устройство для расширения речевой полосы частот». Европейский Патент 0 732 687 B2, 18 сентября 1996.
[11] A. John Robinson, «Низкоскоростной аудиокодер и декодер, работающий в области преобразования с использованием векторного квантования». Патент США 5,999,899, 7 декабря 1999.
[12] J. Thyssen, C. C Lee и J.-H. Chen, «Способ и устройство для устранения временного прерывания сигналов, прошедших адаптивную фильтрацию». Патент США 7,353,168 B2, 28 июня 2002.
[13] E. Ravelli, M. Jander, G. Pietrzyk, M. Dietz и M. Gayer, «Способ и устройство для обработки аудиосигнала, аудиодекодер и аудиокодер». Европейский Патент 2980796 A1, 28 июля 2014.
[14] E. Ravelli, C. Helmrich, G. Markovic, M. Neusinger, M. Jander, M. Dietz и S. Disch, «Устройство и способ для обработки аудиосигнала с использованием постфильтра гармоник». Европейский Патент 2980799 A1, 28 июля 2014.
[15] Рекомендация G.718 ITU-T, Устойчивое к ошибкам кадров узкополосное и широкополосное встроенное кодирование с переменной битовой скоростью речи и аудио с 8-32 кбит/с, 2008.
Аудио и речь, как правило, являются изменяющимися во времени сигналами. Поскольку изменения являются относительно медленными, они обычно считаются квазистационарными в течение короткого периода времени. Параметры адаптивного фильтра (например, кодирование с линейным предсказанием (LPC) или долговременный постфильтр (LTP)), используемые для обработки аудио/речевых сигналов, обновляются один раз за кадр и остаются постоянными в течение длительности кадра, при этом кадр обычно имеет длину от 2 до 40 миллисекунд. Такая фильтрация фактически является изменяющейся во времени и тем самым, как правило, вызывает неустойчивость и прерывания, даже если фильтрация с фиксированными параметрами фильтра их не вызывает [1].
Известен метод плавного микширования. Метод плавного микширования можно кратко изложить следующим образом:
- фильтрация части сигнала с набором c0 параметров, создающая первую фильтрованную часть;
- фильтрация той же части сигнала с набором c1 параметров, создающая вторую фильтрованную часть; и
- выполнение плавного микширования первой и второй фильтрованной части.
Метод плавного микширования среди прочих использован в [9], [10], [11] и [12].
- Еще один метод устранения прерываний состоит в использовании LP-фильтра, как в [13].
Фильтр с бесконечной импульсной характеристикой (IIR) может быть представлен в форме решетки-лестницы [7]. Интерполяция устойчивых IIR-фильтров в форме решетки-лестницы должна приводить к устойчивому изменяющемуся во времени IIR-фильтру [8]. Таким образом, должна существовать возможность обобщения интерполяции коэффициентов отражения из [6] в общем случае IIR-фильтров. Однако такой метод был бы слишком сложным для LTP-фильтрации, поскольку число ненулевых коэффициентов отражения равнялось бы задержке шага (например, при использовании для сглаживания прерываний LTP в [3] это привело бы к порядкам фильтра, превышающим 250).
Сложность является очень важным аспектом в кодеке реального времени, и желательно использовать способ исключения прерываний при изменяющейся во времени фильтрации с наименьшей сложностью.
Для выполнения операций фильтрации предпочтителен метод низкой сложности.
3. Раскрытие изобретения
Предлагается метод низкой сложности для исключения прерываний, например, когда параметры фильтра с Бесконечной Импульсной Характеристикой (IIR) изменяются в последовательных кадрах.
В соответствии с примерами, предлагается система для фильтрации информационного входного сигнала, разделенного на различные интервалы обновления, в соответствии с параметрами, изменяющимися с интервалами обновления, для получения фильтрованного выходного сигнала, при этом система содержит:
блок первого фильтра для фильтрации входного сигнала первого фильтра по меньшей мере на начальном подынтервале в текущем интервале обновления для получения выходного сигнала первого фильтра в соответствии с параметрами, связанными с предыдущим интервалом обновления, при этом блок первого фильтра выполнен с возможностью изменения параметров по меньшей мере на начальном подынтервале с состояния большей фильтрации на состояние меньшей фильтрации; и
блок второго фильтра для фильтрации входного сигнала второго фильтра на начальном интервале в соответствии с параметрами, связанными с текущим интервалом обновления для получения выходного сигнала второго фильтра, при этом блок второго фильтра выполнен с возможностью изменения параметров по меньшей мере на начальном подынтервале с состояния меньшей фильтрации на состояние большей фильтрации,
при этом входной сигнал первого фильтра основывается на информационном входном сигнале, выходной сигнал первого фильтра является промежуточным сигналом, входной сигнал второго фильтра основывается на промежуточном сигнале, а фильтрованный выходной сигнал основывается на выходном сигнале второго фильтра.
В связи с этим, прерывания уменьшаются и/или исключаются, и сложность уменьшается, например, по отношению к методу плавного микширования. Отсутствует необходимость в выполнении двух различных операций фильтрации, и, следовательно, для плавного микширования двух фильтрованных сигналов просто выполняются две операции фильтрации, тем самым уменьшая необходимость в выполнении вычислений.
В соответствии с примерами, предлагается блок третьего фильтра для фильтрации информационного входного сигнала в следующем подынтервале в текущем интервале обновления после начального подынтервала в соответствии с параметрами, связанными с текущим интервалом обновления.
В связи с этим, независимо от начального подынтервала текущий интервал обновления может действовать с использованием параметров, которые являются наиболее подходящими для него.
В соответствии с примерами, предлагается селектор, выполненный с возможностью проверки того, равно ли расстояние между параметрами для текущего интервала обновления 0 или находится в пределах первого порога, чтобы фильтровать информационный входной сигнал по меньшей мере в начальном подынтервале с использованием блока третьего фильтра.
В соответствии с примерами, блок третьего фильтра выполнен с возможностью сохранения того же состояния фильтрации на следующем интервале и/или сохранения постоянного параметра фильтра.
В соответствии с примерами, по меньшей мере один из первого, второго и третьего блоков фильтров действует как долговременный (LTP) фильтр.
В соответствии с примерами, по меньшей мере один из первого, второго и третьего блока имеет передаточную функцию, содержащую числитель и знаменатель, при этом числитель содержит значение коэффициента усиления, указанное в информации о коэффициенте усиления, и при этом знаменатель содержит целочисленную часть задержки шага, указанной в информация о задержке шага, и многоотводного фильтра, зависящего от дробной части задержки шага.
В соответствии с примерами, параметры по меньшей мере одного из первого, второго и третьего блока могут быть получены по информации о гармоничности, информации о коэффициенте усиления, информации о задержке шага, целочисленной части задержки шага информационного входного сигнала и/или дробной части задержки шага информационного входного сигнала.
В соответствии с примерами, параметры по меньшей мере одного из блоков первого, второго и/или третьего фильтров являются параметрами фильтра, выбираемыми по меньшей мере из одного или комбинации из фильтра с кодированием с линейным предсказанием (LPC), фильтра с бесконечной импульсной характеристикой (IIR) и/или фильтра с конечной импульсной характеристикой (FIR).
В соответствии с примерами, блок первого фильтра выполнен с возможностью масштабирования параметров, связанных с предыдущим интервалом обновления, на первый коэффициент масштабирования, изменяющийся до 0 по меньшей мере на начальном подынтервале, и/или блок второго фильтра выполнен с возможностью масштабирования параметров, связанных с текущим интервалом обновления, на второй коэффициент масштабирования, изменяющийся от 0 до значения, отличного от 0 (или от значения, близкого к 0, до второго значения, более далекого от 0, чем значение, близкое к 0) по меньшей мере на начальном подынтервале.
В соответствии с примерами, первый коэффициент масштабирования и второй коэффициент масштабирования являются неотрицательными значениями, дополняющими друг друга до значения, большего 0.
В соответствии с примерами, первый коэффициент масштабирования должен изменяться до 0 до конечного предела по меньшей мере начального подынтервала, и/или второй коэффициент масштабирования должен изменяться от 0 от начального предела текущего интервала обновления до ненулевого значения (или от значения, близкого к 0, до второго значения, более далекого от 0, чем значение, близкое к 0).
В соответствии с примерами, предлагается блок четвертого фильтра, выполненный с возможностью фильтрации информационного входного сигнала по меньшей мере на начальном подынтервале с использованием параметров, которые получены путем интерполяции параметров, связанных с текущим интервалом обновления, и параметров, связанных с предыдущим интервалом обновления.
В соответствии с примерами, предлагается селектор, выполненный с возможностью проверки того, находится ли расстояние между параметрами для текущего интервала обновления в пределах второго порога, чтобы фильтровать информационный входной сигнал по меньшей мере на начальном подынтервале с использованием блока четвертого фильтра.
Система может быть дополнительно выполнена с возможностью активного установления второго порога на основе значений, связанных с сигналом.
В соответствии с примерами, система может быть выполнена с возможностью:
установления второго порога в виде порога расстояния задержки шага, равного минимуму между целочисленной частью задержки шага на текущем интервале обновления и целочисленной частью задержки шага на предыдущем интервале обновления,
чтобы использовать блок четвертого фильтра, когда расстояние между целочисленной частью задержки шага на текущем интервале обновления и целочисленной частью задержки шага на предыдущем интервале обновления меньше, чем порог расстояния задержки шага; и/или
чтобы использовать блоки первого и второго фильтров, когда расстояние между целочисленной частью задержки шага на текущем интервале обновления и целочисленной частью задержки шага на предыдущем интервале обновления больше, чем порог расстояния задержки шага.
В соответствии с примерами, система может быть выполнена с возможностью:
использования условия, связанного с коэффициентами усиления сигнала на текущем интервале обновления и на предыдущем интервале,
чтобы использовать блок четвертого фильтра, когда коэффициенты усиления сигнала и на текущем интервале обновления, и на предыдущем интервале отличаются от нуля, и/или
чтобы использовать блоки первого и второго фильтров, когда по меньшей мере один из коэффициентов усиления сигнала на текущем интервале обновления и на предыдущем интервале равен нулю.
В соответствии с примерами, блок первого фильтра должен выдавать выходной сигнал первого фильтра в виде

где
 изменяется до значения, близкого к 0, при увеличении n,
изменяется до значения, близкого к 0, при увеличении n,
а блок второго фильтра должен выдавать выходной сигнал второго фильтра в виде:
 ,
,
где
 изменяется от значения, близкого к 0, до ненулевого значения при увеличении n,
изменяется от значения, близкого к 0, до ненулевого значения при увеличении n,
где  - текущий k-й интервал обновления,
- текущий k-й интервал обновления,  - начальный подынтервал, n - момент времени, x[n] - информационный входной сигнал,
- начальный подынтервал, n - момент времени, x[n] - информационный входной сигнал,  - параметры, связанные с предыдущим (k-1)-м интервалом обновления,
- параметры, связанные с предыдущим (k-1)-м интервалом обновления,  - параметры, связанные с текущим k-м интервалом обновления, а P и Q связаны с типом фильтра.
- параметры, связанные с текущим k-м интервалом обновления, а P и Q связаны с типом фильтра.
В соответствии с примерами, блок первого фильтра выполнен с возможностью выдачи выходного сигнала первого фильтра в виде
а блок второго фильтра выполнен с возможностью выдачи фильтрованного выходного сигнала (13) в виде

где  - длина начального подынтервала,
- длина начального подынтервала,  - информационный входной сигнал,
- информационный входной сигнал,  - промежуточный сигнал,
- промежуточный сигнал,  - фильтрованный выходной сигнал, n - момент времени,
- фильтрованный выходной сигнал, n - момент времени, 
 , соответственно, основаны на целочисленной части и дробной части задержки шага, связанной с предыдущим интервалом обновления,
, соответственно, основаны на целочисленной части и дробной части задержки шага, связанной с предыдущим интервалом обновления,  , соответственно, основаны на целочисленной части и дробной части задержки шага, связанной с текущим интервалом обновления,
, соответственно, основаны на целочисленной части и дробной части задержки шага, связанной с текущим интервалом обновления,  - коэффициент, основанный на значении коэффициента усиления для текущего интервала обновления,
- коэффициент, основанный на значении коэффициента усиления для текущего интервала обновления,  - коэффициент, основанный на значении коэффициента усиления для установленного интервала обновления и на дробной части шага,
- коэффициент, основанный на значении коэффициента усиления для установленного интервала обновления и на дробной части шага,  - коэффициент, основанный на значении коэффициента усиления для предыдущего интервала обновления,
- коэффициент, основанный на значении коэффициента усиления для предыдущего интервала обновления,  - коэффициент, основанный на значении коэффициента усиления для предыдущего интервала обновления и на дробной части шага, Lden и Lnum постоянны и/или основаны на частоте дискретизации входного сигнала.
- коэффициент, основанный на значении коэффициента усиления для предыдущего интервала обновления и на дробной части шага, Lden и Lnum постоянны и/или основаны на частоте дискретизации входного сигнала.
В соответствии с примерами, длительность начального подынтервала составляет от 5% до 40% от длительности текущего интервала обновления.
В соответствии с примерами, система выполнена с возможностью проверки коэффициента gk усиления текущего k-го кадра и коэффициента gk-1 усиления предыдущего (k-1)-го кадра таким образом, что:
- Если gk-1=0 и gk=0, то нет ни первой, ни второй, ни третьей фильтрации; и/или
- Если gk-1=0 и gk≠0, то
- первая фильтрация деактивирована;
- имеется вторая фильтрация по меньшей мере на начальном подынтервале;
- имеется третья фильтрация в следующем подынтервале; и/или
- Если gk-1≠0 и gk=0, то
- имеется первая фильтрация по меньшей мере на начальном подынтервале;
- вторая фильтрация деактивирована;
- третья фильтрация деактивирована; и/или
- Если gk-1≠0 и gk≠0, то проверяется разность между целочисленной и дробной частями задержки шага таким образом, что:
- Если целочисленная и дробная части задержки шага в текущем k-м кадре и в предыдущем (k-1)-м кадре одинаковы, то:
- нет ни первой фильтрации, ни второй фильтрации;
- имеется третья фильтрация на 100% текущего интервала обновления;
- в иных случаях, если имеется разность в целочисленной или в дробной части задержки шага:
- имеется первая фильтрация по меньшей мере на начальном подынтервале;
- имеется вторая фильтрация с помощью 52 по меньшей мере на начальном подынтервале;
- имеется третья фильтрация с помощью 53 в следующем подынтервале.
В соответствии с примерами, система содержит сторону кодера и сторону декодера, при этом по меньшей мере один из блоков первого, второго, третьего и/или четвертого фильтров находится на стороне декодера.
В соответствии с примерами, система содержит сторону кодера и сторону декодера, при этом по меньшей мере один из блоков первого, второго, третьего и/или четвертого фильтров находится на стороне кодера.
В соответствии с примерами, система содержит преобразователь для преобразования первого представления информационного сигнала во второе представление информационного сигнала.
В соответствии с примерами, система выполнена с возможностью:
установления того, будет ли первый и/или блок второго фильтра выполнять функцию тождественного фильтра; и
в случае установления шунтировать первый и/или второй фильтр.
В соответствии с примерами, предлагается способ для фильтрации информационного входного сигнала, включая различные интервалы обновления, в соответствии с параметрами, соответствующими интервалам обновления, для получения фильтрованного выходного сигнала, при этом способ включает в себя:
выполнение первой фильтрации по меньшей мере на начальном подынтервале текущего интервала обновления в соответствии с параметрами, связанными с предыдущими интервалами обновления, при этом параметры по меньшей мере на начальном подынтервале изменяются с состояния большей фильтрации на состояние меньшей фильтрации; и
выполнение второй фильтрации по меньшей мере на начальном подынтервале в соответствии с параметрами, связанными с текущим интервалом обновления, при этом параметры на начальном подынтервале изменяются с состояния меньшей фильтрации на состояние большей фильтрации,
при этом первая фильтрация выполняется на информационном входном сигнале, а вторая фильтрация выполняется на сигнале, полученном с помощью первой фильтрации.
В соответствии с примерами, предлагается долговременное запоминающее устройство, хранящее инструкции, которые при исполнении процессором инициируют осуществление процессором одного из способов, описываемых выше или ниже, и/или реализацию системы, как указано выше или ниже, и/или компонента такой системы.
Информационный входной сигнал может, например, представлять собой аудиосигнал.
В некоторых примерах интервал представляет собой полный кадр. В других примерах интервал меньше, чем кадр.
В связи с этим, вышеуказанный метод может быть осуществлен только для начального интервала или конечного интервала установленного кадра: в следующем интервале могут использоваться параметры для установленного кадра, дополнительно снижая сложность вычислений.
В связи с этим, в следующем интервале отсутствует изменение выхода.
В примерах вместо рассмотренного выше метода может использоваться интерполяция коэффициентов. Это может регулироваться на основе выбора для улучшения адаптации операций фильтрации к характеристике сигнала.
В примерах можно устанавливать второй порог на минимум между целочисленной частью задержки шага в установленном кадре и целочисленной частью задержки шага в предыдущем кадре (или следующем кадре) и/или устанавливать второй порог на максимум между коэффициентом усиления в установленном кадре и коэффициентом усиления в предыдущем кадре или следующем кадре. В связи с этим, можно использовать блок четвертого фильтра, когда расстояние между коэффициентом усиления в установленном кадре и коэффициентом усиления в предыдущем кадре меньше, чем второй порог, и/или использовать блоки первого и второго фильтров, когда расстояние между целочисленной частью задержки шага в установленном кадре и целочисленной частью задержки шага в предыдущем кадре или следующем кадре меньше, чем второй порог.
В примерах можно определять условие, связанное с коэффициентами усиления сигнала в установленном кадре и в предыдущем или следующем кадре. В связи с этим, можно использовать блок четвертого фильтра, когда по меньшей мере один из коэффициентов усиления сигнала в установленном кадре и в предыдущем или следующем кадре равен нулю. В примерах можно использовать блоки первого и второго фильтров, когда коэффициенты усиления сигнала и в установленном кадре, и в предыдущем или следующем кадре отличаются от нуля.
В связи с этим, параметры, связанные с предыдущим кадром или следующим кадром, и параметры, связанные с установленным кадром, изменяются (например, выборка за выборкой) для выполнения постепенной фильтрации, которая исключает и/или уменьшает прерывание между кадрами.
В связи с этим, входные сигналы блоков первого и второго фильтров могут быть эффективно и согласованно демпфированы.
В примерах блок первого фильтра выполнен с возможностью выдачи выходного сигнала первого фильтра (13) в виде
а блок (14) второго фильтра выполнен с возможностью выдачи фильтрованного выходного сигнала (13) в виде

где - длина начального подынтервала, - информационный входной сигнал (11), - промежуточный сигнал, - фильтрованный выходной сигнал (15), n - момент времени, , соответственно, основаны на целочисленной части и дробной части задержки шага, связанной с предыдущим кадром, , соответственно, основаны на целочисленной части и дробной части задержки шага, связанной с установленным кадром,  - коэффициенты, основанные на значении коэффициента усиления для установленного кадра,
- коэффициенты, основанные на значении коэффициента усиления для установленного кадра,  - коэффициенты, основанные на значении коэффициента усиления для предыдущего кадра, Lden и Lnum постоянны и/или основаны на частоте дискретизации входного сигнала.
- коэффициенты, основанные на значении коэффициента усиления для предыдущего кадра, Lden и Lnum постоянны и/или основаны на частоте дискретизации входного сигнала.
В примерах в состоянии меньшей фильтрации параметры одного и того же фильтра изменяются, чтобы получить значение, более близкое к 0, чем в состоянии большей фильтрации. Например, параметры могут масштабироваться с помощью коэффициентов масштабирования, которые постепенно изменяются.
Настоящее изобретение может использоваться, например, для Долговременной Постфильтрации (LTPF). Это средство для основанного на преобразовании аудиокодирования, которое помогает при снижении интергармонических шумов. Оно основывается на постфильтре, который применяется к сигналу во временной области после декодирования с преобразованием. Этот постфильтр является по существу фильтром с бесконечной импульсной характеристикой (IIR) c гребенчатой частотной характеристикой, регулируемой одним параметром (задержкой шага) или двумя параметрами (задержкой шага и коэффициентом усиления). Для повышения устойчивости параметры постфильтра (задержка шага и коэффициент усиления на кадр) оцениваются на стороне кодера и кодируются в битовом потоке, когда коэффициент усиления является ненулевым.
4. Описание чертежей
Фиг. 1, 1a, 2, 3, 4, 5a и 5b иллюстрируют системы в соответствии с примерами;
Фиг. 6, 7, и 7a иллюстрируют способы в соответствии с примерами;
Фиг. 8 и 9 иллюстрируют системы в соответствии с примерами;
Фиг. 10 и 11 иллюстрируют временные диаграммы в соответствии с примерами;
Фиг. 12a и 12b иллюстрируют системы в соответствии с примерами; и
Фиг. 13 иллюстрирует передаточную функцию в соответствии с примером.
5. Примеры
В подходе, излагаемом в данном документе, параметры фильтрации (называемые также параметрами фильтра или параметрами), как правило, различны для различных интервалов обновления. Два последовательных интервала обновления могут иметь различные параметры. В примерах интервал обновления может быть адаптируемым к сигналу, и его длина может со временем изменяться или сдвигаться.
В некоторых примерах сигнал делится на кадры. Например, кадр может быть связан с фиксированным числом выборок и/или фиксированной длительностью (например, 20 мс). При передаче или сохранении кадр может быть связан с конкретными параметрами, например, параметрами фильтрации. В пределах одного и того же кадра параметры, как правило, могут быть постоянными.
В некоторых примерах интервал обновления может соответствовать кадру. Следовательно, при передаче или сохранении сигнал может содержать параметры (например, параметры фильтрации), связанные с кадром (который также является интервалом обновления), например, с помощью данных, кодированных применительно к конкретному кадру.
В некоторых примерах интервал обновления не соответствует предопределенному кадру. При передаче или сохранении сигнал может содержать параметры, связанные с интервалом обновления, даже если они сигнализируются как связанные с кадром. В некоторых случаях новый кадр (с новыми параметрами) предваряет новый интервал обновления, а старый интервал обновления при этом связан со старыми параметрами. Когда интервалы обновления являются адаптивными (например, их длина устанавливается на лету, например, на основе характеристик сигнала), разумеется, они, как правило, не соответствуют кадрам фиксированной длины. Поэтому можно связывать параметры с конкретным интервалом обновления (который в некоторых случаях связан с кадром).
Фиг. 1 иллюстрирует систему 10, которая может являться системой для фильтрации входного сигнала 11 (обозначенного «x» или «x[n]», где «n» означает конкретную выборку).
Сигнал 11 может являться информационным сигналом, таким как аудиосигнал. Может использоваться цифровое представление информационного сигнала. Сигнал может содержать последовательность выборок, каждая из которых может быть получена в свой момент времени (например, дискретные моменты времени). Сигнал может быть разделен на различные кадры и/или интервалы обновления (например, последовательность выборок). Каждый кадр и/или интервал обновления может быть образован множеством выборок (например, 1, 2, …, n, …), например, каждая из которых связана с дискретным моментом времени). Каждый кадр и/или интервал обновления может подразделяться на начальный подынтервал и следующий подынтервал (подынтервал может являться элементарным подынтервалом, поскольку его длина может быть меньше, чем длина интервала обновления). Как правило, выборки начального подынтервала предшествуют выборкам (находятся перед ними) следующего подынтервала того же кадра и/или интервала обновления. Установленный (текущий, обработанный в настоящий момент) кадр предшествует следующему кадру и/или интервалу обновления и предваряется предыдущим (предшествующим, старым) кадром. Установленный (текущий, настоящий) интервал обновления предшествует следующему интервалу обновления и предваряется предыдущим (предшествующим, старым) интервалом обновления. Начальный подынтервал интервала обновления может иметь длительность, составляющую между 1% и 99%, более конкретно - 20% и 30% (например, четверть) от длительности текущего интервала обновления. Следующий подынтервал может иметь длительность, составляющую между 1% и 99%, более конкретно - 70% и 80% (например, три четверти) от длительности текущего интервала обновления.
В некоторых примерах упоминается «по меньшей мере один начальный подынтервал» интервала обновления, при этом подразумевается, что в некоторых примерах также может быть охвачено 100% интервала обновления.
Система 10 может фильтровать информационный входной сигнал 11 (x) в соответствии с параметрами, изменяющимися в зависимости от интервалов обновления (например, параметрами, которые, как правило, изменяются во времени в соответствии с конкретным интервалом обновления, с которым они связаны, например, посредством параметров, кодируемых и связанных с конкретным кадром). Система 10 может выдавать фильтрованный выходной сигнал 15 (y или y[n]). Система 10 может выдавать постфильтрованный аудиосигнал (например, представление постфильтрованного аудиосигнал во временной области (TD)).
Система 10 может содержать блок 12 первого фильтра для фильтрации информационного входного сигнала 11 (входного сигнала первого фильтра). Блок 12 первого фильтра может выполнять операции с выборками по меньшей мере начального подынтервала текущего интервала обновления (настоящего интервала обновления, такого как интервал обновления, который обрабатывается в настоящий момент) для получения выходного сигнала первого фильтра, который является промежуточным сигналом 13 (y’ или y’[n]). (Указанный по меньшей мере начальный подынтервал может относиться в примерах только к начальному подынтервалу или в примерах к интервалу, превышающему начальный подынтервал, такой как интервал обновления). Промежуточный сигнал 13 может быть получен с использованием параметров, связанных с предыдущим интервалом обновления (например, интервалом обновления, предшествующим текущему интервалу обновления). Блок 12 первого фильтра выполнен с возможностью изменения (например, постепенно, например, путем плавного изменения уровня, например, монотонно) параметров по меньшей мере на начальном подынтервале с состояния большей фильтрации на состояние меньшей фильтрации. Например, параметры могут быть менее уменьшенными и/или менее демпфированными (тем самым означая состояние большей фильтрации) в соответствии с первыми выборками на начальном подынтервале. Параметры могут быть более уменьшенными и/или более демпфированными (тем самым означая состояние меньшей фильтрации) в соответствии с последними выборками по меньшей мере на начальном подынтервале (где параметры могут обрабатываться, чтобы они были ближе к 0).
Система 10 может содержать блок 14 второго фильтра. Блок 14 второго фильтра может иметь входной сигнал второго фильтра и выходной сигнал второго фильтра. Блок 14 второго фильтра может фильтровать промежуточный сигнал 13 (который является входным сигналом второго фильтра). Блок 14 второго фильтра может выполнять операции с выборками по меньшей мере начального подынтервала текущего интервала обновления (например, того же по меньшей мере начального подынтервала, в котором выполняет операции блок 12 фильтра). Блок 14 второго фильтра может фильтровать промежуточный сигнал в соответствии с параметрами, связанными с текущим интервалом обновления. Блок 14 второго фильтра может быть выполнен с возможностью изменения (например, постепенно, например, путем плавного изменения уровня, например, монотонно) параметров по меньшей мере на начальном подынтервале с состояния меньшей фильтрации на состояние большей фильтрации. Например, параметры могут быть более уменьшенными и/или более демпфированными (тем самым означая состояние меньшей фильтрации) для первый выборки по меньшей мере на начальном подынтервале (где параметры могут обрабатываться, чтобы они стали равными 0 или близкими к 0). Параметры могут быть менее уменьшенными и/или менее демпфированными (тем самым означая состояние большей фильтрации) для последних выборок по меньшей мере на начальном подынтервале.
Состояние меньшей фильтрации может быть таким, что импульсная характеристика ближе к импульсной характеристике тождественного фильтра, чем импульсная характеристика в состоянии большей фильтрации. В некоторых примерах состояние меньшей фильтрации и состояние большей фильтрации могут быть такими, что состояние меньшей фильтрации предполагает увеличенную энергию импульсной характеристики по отношению к энергии импульсной характеристики состояния большей фильтрации. В некоторых примерах состояние меньшей фильтрации и состояние большей фильтрации могут быть такими, что состояние меньшей фильтрации предполагает уменьшенную энергию импульсной характеристики по отношению к энергии импульсной характеристики состояния большей фильтрации. Когда блок 12 первого фильтра выполняет операции в состояние меньшей фильтрации, он предполагает импульсную характеристику, которая отличается (например, ниже или выше) от энергии, предполагаемой в том же блоке 12 первого фильтра, когда он выполняет операции в состояние большей фильтрации. То же самое относится и к блоку 14 второго фильтра. В состоянии меньшей фильтрации параметры могут быть ближе к 0, чем в состоянии большей фильтрации.
В примерах блок 12 первого фильтра может переходить из состояния большей фильтрации в состояние меньшей фильтрации, и/или блок 14 второго фильтра может переходить из состояния меньшей фильтрации в состояние большей фильтрации.
Вообще говоря, при переходе из состояния большей фильтрации в состояние меньшей фильтрации параметры могут изменяться (например, постепенно и/или монотонно и/или путем плавного изменения уровня и/или путем демпфирования). В состоянии меньшей фильтрации параметры могут обрабатываться, чтобы они стали равными 0, или могут обрабатываться, чтобы они стали ближе к 0, чем параметры в состоянии большей фильтрации. Например, в состоянии большей фильтрации параметры могут быть менее уменьшенными и/или менее демпфированными и/или более далекими от 0, чем в состоянии меньшей фильтрации.
В состоянии меньшей фильтрации эффект фильтрации может быть уменьшенным (например, может быть получен такой же эффект, как у тождественного фильтра, или близкий к нему). В состоянии большей фильтрации может быть получен эффект сильной фильтрации.
В состоянии большей фильтрации входной сигнал является сильно фильтрованным. В состоянии меньшей фильтрации входной сигнал не является сильно фильтрованным. В примерах чем больше демпфированы параметры, тем меньше состояние фильтрации.
Блоки 12, 14 первого и/или второго фильтра могут быть выполнены с возможностью демпфирования и/или снижения параметров таким образом, что в состоянии большей фильтрации уменьшенные и/или демпфированные параметры менее демпфированы (например, более далекие от 0) и/или менее уменьшены, чем в состоянии меньшей фильтрации (например, близки к 0).
Блок 12 первого фильтра может быть выполнен с возможностью масштабирования (например, уменьшения размера) параметров с использованием первого коэффициента демпфирования или коэффициента масштабирования, и/или блок 14 второго фильтра может быть выполнен с возможностью масштабирования (например, уменьшения размера) параметров с использованием второго коэффициента демпфирования или коэффициента масштабирования. Первый коэффициент демпфирования или коэффициент масштабирования и/или второй коэффициент демпфирования или коэффициент масштабирования может быть ближе к 0 в состоянии меньшей фильтрации, чем в состоянии большей фильтрации.
Блок 12, 14 первого и/или второго фильтра может быть выполнен с возможностью демпфирования и/или снижения и/или уменьшения размера параметров таким образом, чтобы параметры были демпфированы и/или уменьшены на первые коэффициенты демпфирования и/или коэффициенты масштабирования, которые ближе к 0 в состоянии меньшей фильтрации, чем в состоянии большей фильтрации.
Блок 12 первого фильтра может быть выполнен с возможностью изменения параметров с состояния большей фильтрации на состояние меньшей фильтрации путем постепенного демпфирования и/или снижения параметров, связанных с предыдущим интервалом обновления, и/или блок 14 второго фильтра может быть выполнен с возможностью изменения параметров путем постепенного повышения и/или увеличения с параметров, близких к 0, на параметры, связанные с текущим интервалом обновления.
Блок 12 первого фильтра может быть выполнен с возможностью изменения параметров с состояния большей фильтрации на состояние меньшей фильтрации путем использования уменьшающихся коэффициентов демпфирования и/или коэффициентов масштабирования (например, путем использования коэффициентов демпфирования и/или коэффициентов масштабирования, которые, например, постепенно приближаются к 0). Блок 14 второго фильтра может быть выполнен с возможностью изменения (например, постепенного) параметров с состояния меньшей фильтрации на состояние большей фильтрации путем увеличения (например, постепенного) коэффициентов демпфирования и/или коэффициентов масштабирования (например, путем использования коэффициентов демпфирования и/или коэффициентов масштабирования, которые, например, постепенно отклоняются от 0).
Блок 12 первого фильтра может быть выполнен с возможностью изменения параметров с состояния большей фильтрации на состояние меньшей фильтрации путем применения функции уменьшающего кадрирования к параметрам (например, функции кадрирования, которая приближается к 0, например, постепенно), и/или блок 14 второго фильтра может быть выполнен с возможностью изменения параметров с состояния меньшей фильтрации на состояние большей фильтрации путем применения функция увеличивающего кадрирования к параметрам (например, функции кадрирования, которая отклоняется от 0, например, постепенно).
Параметры могут предусматриваться, например, в виде управляющих данных во входном сигнале 11. Фильтры могут представлять собой, например, Линейные Неизменяющиеся во Времени (LTI) фильтры с бесконечной импульсной характеристикой (IIR) (например, для LTP-постфильтрации). Параметры могут представлять собой, например, информацию о коэффициенте усиления и/или информацию о шаге, либо содержать ее.
В частности, блоки 12 и 14 первого и второго фильтра могут являться частью LTP-фильтра (или постфильтра), например, в декодере (например, аудиодекодере). Например, параметры могут быть получены по результатам основанных на гармоничности измерениях. Например, параметры могут быть основаны на задержке T шага, на целочисленной части Tint задержки шага, на дробной части Tfr задержки шага и/или на коэффициенте g усиления, полученных, например, в аудиодекодере. Параметры могут быть связаны, например, с интервалом обновления (который в некоторых примерах составляет кадр фиксированной длины или может иметь адаптивную длину).
Каждый из блоков первого и второго фильтра может вследствие этого быть связан с конкретными параметрами и/или с конкретной передаточной функцией. В частности, передаточная функция может быть типа, имеющего числитель и знаменатель, при этом числитель содержит значение коэффициента усиления, указанное в информации о коэффициенте усиления, и при этом знаменатель содержит целочисленную часть задержки шага, указанной в информация о задержке шага, и многоотводного фильтра в зависимости от дробной части задержки шага. Например, передаточная функция может иметь вид:
и ее параметры могут определяться по параметрам, оцениваемым на стороне кодера, и/или декодироваться из битового потока.  может представлять собой декодированный коэффициент усиления,
может представлять собой декодированный коэффициент усиления,  - целочисленную и дробную части декодированной задержки шага,
- целочисленную и дробную части декодированной задержки шага,  – два скаляра, которые взвешивают коэффициент усиления, а
– два скаляра, которые взвешивают коэффициент усиления, а  – FIR-фильтр нижних частот, коэффициенты которого зависят от дробной части декодированной задержки шага. Порядок и коэффициенты в
– FIR-фильтр нижних частот, коэффициенты которого зависят от дробной части декодированной задержки шага. Порядок и коэффициенты в  могут также зависеть от скорости передачи битов и выходной частоты дискретизации. Различные частотные характеристики могут быть выполнены и настроены для каждой комбинации скорости передачи битов и выходной частоты дискретизации. Пример передаточной функции 130 приведен на фиг. 13 (тем не менее, возможны и другие типы фильтров и/или передаточных функций).
могут также зависеть от скорости передачи битов и выходной частоты дискретизации. Различные частотные характеристики могут быть выполнены и настроены для каждой комбинации скорости передачи битов и выходной частоты дискретизации. Пример передаточной функции 130 приведен на фиг. 13 (тем не менее, возможны и другие типы фильтров и/или передаточных функций).
Примечательно, что параметры и передаточная функция могут изменяться для каждого интервала обновления (который может составлять один кадр, в соответствии с которым может подразделяться исходный сигнал). Следовательно, k-й интервал обновления может быть связан с передаточной функцией Hk(z) и такими параметрами как  ,
,  ,
,  , в то время как (k-1)-й интервал обновления может быть связан с передаточной функцией Hk-1(z) и такими параметрами как
, в то время как (k-1)-й интервал обновления может быть связан с передаточной функцией Hk-1(z) и такими параметрами как  ,
,  ,
,  . Следовательно, в k-м кадре или интервале обновления блок 12 первого фильтра может выполнять операции с использованием старых параметров , , , в то время как блок 14 второго фильтра может выполнять операции с использованием обновленных параметров , , . Этот процесс может выполняться по меньшей мере для начального подынтервала (или в некоторых примерах для 100%) k-го обновленного интервала.
. Следовательно, в k-м кадре или интервале обновления блок 12 первого фильтра может выполнять операции с использованием старых параметров , , , в то время как блок 14 второго фильтра может выполнять операции с использованием обновленных параметров , , . Этот процесс может выполняться по меньшей мере для начального подынтервала (или в некоторых примерах для 100%) k-го обновленного интервала.
В более общем случае каждый или по меньшей мере один из фильтров в элементах 10 и 12 может являться LTI IIR фильтром (который может также быть представлен как  ), приведенным в виде:
), приведенным в виде:
или с использованием линейного дифференциального уравнения:
Коэффициенты  могут являться параметрами фильтра. Примечательно, что коэффициенты могут варьироваться, как правило, для различных кадров и/или интервалов обновления.
могут являться параметрами фильтра. Примечательно, что коэффициенты могут варьироваться, как правило, для различных кадров и/или интервалов обновления.
Следует отметить, что фильтрованный сигнал 15 приводит к плавному переходу между предыдущим (k-1)-м интервалом обновления и текущим k-м интервалом обновления. Прерывания между различными интервалами обновления вследствие этого исключаются и/или уменьшаются.
Более того, процессы для выполнения функций фильтрации имеют особенно пониженную сложность.
Этот вид системы может использоваться, например, для долговременного постфильтра (LTPF).
Блоки 12 и 14 первого и второго фильтра могут рассматриваться как соединенные последовательно (или каскадно, или «один за другим»).
Фиг. 1a иллюстрирует вариант 10’ системы 10, в которой блок 12 первого фильтра и блок 14 второго фильтра могут быть шунтированы в селекторах 16 и 17 соответственно. Селекторы 16 и 17 может управляться, например, параметрами (на фиг. 1a показано, что внешнее условие может вызывать шунтирование блока фильтра).
Фиг. 2 иллюстрирует систему 10, которая может реализовывать изображенную на фиг. 1 систему (возможен также вариант 10’, даже если используются изображенные на фиг. 1a шунтирующие соединения, в данном случае не показанные на фиг. 2 для ясности). Информация в отношении текущего k-го интервала обновления информационного входного сигнала (входного сигнала первого фильтра) 11 может содержать представление 11a сигнала (например, фактические значения выборок в различные моменты времени во временной области, которые составляют «x») и управляющие данные 11b (которые могут, например, кодироваться в битовом потоке и передаваться из передатчика или сохраняются в памяти). Управляющие данные 11b могут содержать параметры, связанные с фильтрацией в k-м кадре или интервале обновления (например, расчетную задержку шага и/или значение коэффициентов усиления, либо аналогичные значения, либо их обработанные версии). Параметры для текущего k-го кадра или интервала обновления могут сохраняться в запоминающем элементе 21a параметров (например, блоке памяти, таком как регистр). Запоминающий элемент 21b параметров может содержать параметры предыдущего (k-1)-го кадра или интервала обновления. Стрелка 21’ означает, что параметры для предыдущего (k-1)-го кадра или интервала обновления (ранее сохраненные в запоминающем элементе 21a) становятся «параметрами предыдущего кадра или интервала обновления» и сохраняются в запоминающем элементе 21b, когда обрабатывается новый k-й кадр или интервал обновления.
Параметры, сохраненные в запоминающем элементе 21b (который был подготовлен для предыдущего (k-1)-го кадра), могут применяться к первой фильтрующей части 22 (которая может реализовывать функции блока 12 первого фильтра) по меньшей мере для начального подынтервала текущего k-го кадра или интервала обновления. Параметры, сохраненные в запоминающем элементе 21a (подготовленном для текущего k-го кадра) могут применяться ко второй фильтрующей части 24 (которая может реализовывать функции блока 14 второго фильтра) по меньшей мере для начального подынтервала текущего k-го кадра или интервала обновления.
Однако параметры, сохраненные в запоминающем элементе 21b (изначально подготовленные для предыдущего (k-1)-го интервала обновления), могут быть изменены, например, блоком 23b, чтобы инициировать переход первой фильтрующей части 22 (например, постепенно, например, монотонно) из состояния большей фильтрации в состояние меньшей фильтрации в пределах начального подынтервала текущего k-го интервала обновления. Например, параметры могут масштабироваться (например, уменьшаться в размере, демпфироваться) с использованием коэффициента демпфирования, который приближается к 0, например, уменьшающегося коэффициента демпфирования (например, демпфирования путем умножения). Блок 23b может применять функцию кадрирования. Функция кадрирования может изменяться в сторону 0 и/или уменьшаться по меньшей мере на начальном подынтервале (например, от максимального положительного значения, например, 1 в первой выборке k-го текущего интервала обновления до минимального значения, например, 0 в последней выборке по меньшей мере начального подынтервала).
Например, снижение эффекта фильтрации (например, с состояния большей фильтрации на состояние меньшей фильтрации) может быть получено путем постепенного снижение коэффициента демпфирования (например, с максимального значения, например, 1 на минимальное или пренебрежимо малое значение, например, 0). Когда коэффициент демпфирования является пренебрежимо малым (или 0), параметры изменяются на пренебрежимо малое (или 0) значение, и выход 13 (y’) первой фильтрующей части 22 почти аналогичен (или такой же) информационному входному сигналу 11 (x).
Параметры, сохраненные в запоминающем элементе 21a (связанном с текущим k-м кадром или интервалом обновления), могут изменяться блоком 23a, чтобы инициировать переход второй фильтрующей части 24 (например, постепенно, например, монотонно) из состояния меньшей фильтрации в состояние большей фильтрации в пределах по меньшей мере начального подынтервала текущего k-го кадра или интервала обновления. Например, параметры могут масштабироваться (например, уменьшаться в размере, демпфироваться) путем повышения коэффициента демпфирования (например, путем умножения), который может увеличиваться с 0 или значения, близкого к 0, до значения, более далекого от 0. Блок 23a может применять функцию кадрирования. Функция кадрирования может увеличиваться или иным образом изменяться (например, с состояния меньшей фильтрации по направлению к состоянию большей фильтрации) от начального момента времени начального подынтервала до конечного момента времени начального подынтервала (например, от значения, близкого к 0, до значения, более далекого от 0, и/или от минимального значения в первой выборке начального подынтервала до положительного максимального значения, например, 1 в последней выборке начального подынтервала k-го текущего кадра или интервала обновления или в последней выборке кадра или интервала обновления).
Например, повышение эффекта фильтрации (например, с состояния меньшей фильтрации по направлению к состоянию большей фильтрации) может быть получено путем постепенного увеличения от 0 или значения, близкого к 0, до значения, более далекого от 0, например, путем увеличения или повышения (например, монотонно или строго монотонно) коэффициента демпфирования (например, от значения, близкого к 0, до значения, более далекого от 0, и/или от минимального или пренебрежимо малого значения, например, 0 до максимального значения, например, 1). Когда коэффициент демпфирования является пренебрежимо малым (или 0), параметры изменяются до пренебрежимо малого (или 0) значения, и выход второй фильтрующей части 24 почти аналогичен (или такой же) своему входу (который является промежуточным сигналом y’ или 13).
В примерах параметры для блоков 12, 14 первого и/или второго фильтра могут быть изменены в течение последовательности выборок по меньшей мере начального подынтервала с помощью коэффициентов (например, коэффициентов масштабирования блоков 23a, 23b), которые дополняют друг друга до постоянного значения (например, положительного значения, такого как 1) таким образом, что их сумма постоянна. В примерах изменение коэффициентов может быть линейным (например, описываемым с помощью уравнения 1-й степени).
В примерах первая фильтрующая часть 22 и вторая фильтрующая часть 24 могут совместно использовать одну и ту же аппаратную/программную структуру, выход которой изменяется только посредством ввода различных входных данных и/или параметров и/или коэффициентов.
Примечательно, что параметры могут быть связаны в запоминающих элементах 21a и 21b с конкретной длиной подынтервала или со 100% интервала обновления. Следовательно, может быть известно, какая доля (или в любом случае какая часть) интервала обновления или кадра должна быть сглажена. В некоторых случаях выбор пользователя (например, устанавливаемый в течение сеанса конфигурирования) может определять длину по меньшей мере подынтервала.
Фиг. 3 иллюстрирует систему 30, которая может содержать фильтрующую секцию 10 (или 10’, даже если шунтирующие соединения не показаны на фиг. 3) по меньшей мере для начального подынтервала и фильтрующую секцию 31 для следующего подынтервала (где метод двойной фильтрации на фиг. 1 и 2 используется в 100% интервала обновления, «фильтрующая секция для следующего подынтервала» не действует). Фильтрующая секция для начального подынтервала может быть такой же, как и в системе 10. Фильтрующая секция 31 для следующего подынтервала может быть выполнена с возможностью фильтрации сигнала в текущем k-м интервале обновления после окончания части, фильтрованной фильтрующей секцией 10 по меньшей мере для начального подынтервала (который может являться следующим интервалом вслед за начальным подынтервалом). Фильтрующая секция 31 для следующего интервала может являться третьим фильтром, не имеющим параметров демпфирования. Следовательно, третья фильтрующая секция 31 может просто применять параметры, изначально подготовленные для текущего интервала обновления.
Селектор 32 может контролировать информационный входной сигнал 11 и переключаться между использованием фильтрующей секции 10 для начального подынтервала и использованием фильтрующей секции 31 для следующего интервала. Примечательно, что фильтрующая секция 31 для следующего интервала (третьего фильтра) может быть выполнена из структурных и/или функциональных блоков, используемых для первого и/или второго фильтров 12 и 14.
Дополнительно или в качестве альтернативы селектор 32 может решать, должна ли в течение начального подынтервала фильтрующая секция 10 (с первым и вторым фильтрами 12, 14) использоваться для начального подынтервала или должна ли фильтрующая секция 31 использоваться по меньшей мере для начального подынтервала (помимо использования фильтрующей секции 31 для следующего подынтервала - на всякий случай). Решение может быть основано на конкретных условиях, который могут, например, основываться на параметрах (например, на сравнениях между значениями параметров, связанными с текущим интервалом обновления, и значениями параметров, связанными с предыдущим интервалом обновления). Некоторые примеры этого решения приведены в нижеследующих абзацах.
Фильтры в элементах 22, 24 и 31 могут являться LTP-постфильтрами, как упомянуто выше, или в более общем случае LTI IIR фильтрами (которые могут также быть представлены как ) и могут быть приведены в виде:
или с использованием линейного дифференциального уравнения:
Коэффициенты  могут являться параметрами фильтра. Фиг. 10 иллюстрирует интервал T обновления применительно к фильтру Hk (например, в текущем k-м интервале обновления) и предыдущий интервал применительно к фильтру Hk-1 (например, в предыдущем (k+)-м интервале обновления). Примечательно, что фиг. 11 иллюстрирует интервал обновления (или кадр)
могут являться параметрами фильтра. Фиг. 10 иллюстрирует интервал T обновления применительно к фильтру Hk (например, в текущем k-м интервале обновления) и предыдущий интервал применительно к фильтру Hk-1 (например, в предыдущем (k+)-м интервале обновления). Примечательно, что фиг. 11 иллюстрирует интервал обновления (или кадр)  , начальный подынтервал
, начальный подынтервал  , в котором используются оба фильтра, и следующий подынтервал
, в котором используются оба фильтра, и следующий подынтервал  , в котором используется только фильтрующая секция 31 для следующего интервала. (В примерах, в которых 100% интервала обновления (или кадра) фильтруется дважды элементами 12 и 14, можно понять, что
, в котором используется только фильтрующая секция 31 для следующего интервала. (В примерах, в которых 100% интервала обновления (или кадра) фильтруется дважды элементами 12 и 14, можно понять, что  , т.е., подынтервал является таким же, как и интервал, а следующий интервал не существует.)
, т.е., подынтервал является таким же, как и интервал, а следующий интервал не существует.)
Рассмотрим изменяющаяся во времени фильтр, который находится в интервале  обновления, равном фильтру
обновления, равном фильтру  LTI IIR (который может являться LTP-постфильтром):
LTI IIR (который может являться LTP-постфильтром):

где T относится к интервалу обновления (и может состоять из дискретного числа выборок), а k - его индекс, k-1 связан с предыдущим (k-1)-м интервалом обновления. Третья фильтрующая секция 31 может быть этого типа. P и Q могут быть характерными для фильтра (например, порядок упреждающего фильтра и порядок фильтра обратной связи соответственно). Q может, например, относиться к максимальному возможному значению для  .
.
Элементы 12 и/или 22 первого фильтра могут выдавать промежуточный сигнал y’ в виде:

где  изменяется по направлению к 0, когда n увеличивается для kT-T_l≤n<(k+1)T
изменяется по направлению к 0, когда n увеличивается для kT-T_l≤n<(k+1)T

где относится к начальному подынтервалу.
Элементы 14 и/или 24 второго фильтра могут выдавать фильтрованный выходной сигнал y в виде:


Примечательно, что фильтрованное выходное значение  имеет вход, основанный на выходе
имеет вход, основанный на выходе  промежуточного фильтра, выдаваемом первым фильтром.
промежуточного фильтра, выдаваемом первым фильтром.
Фиг. 4 иллюстрирует систему 40 в качестве модификации системы, изображенной на фиг. 2. Селектор (не показан) может переходить с использования первого режима, в котором начальный подынтервал () является фильтрованным (как в системе 10) на использование второго режима, в котором следующий подынтервал текущего интервала обновления является фильтрованным. Как представлено девиатором 41a и коммутатором 41b, после фильтрации информационного входного сигнала x на начальном подынтервале, как на фиг. 2, первая фильтрующая часть 22 может быть шунтирована девиатором 41a. В связи с этим, на вторую фильтрующую часть 24 может непосредственно подаваться представление 11a информационного входного сигнала x. Как представлено девиатором 41c, параметры, сохраненные в запоминающем элементе 21a, могут непосредственно использоваться во второй фильтрующей части 24 без демпфирования, т.е., шунтирования блока 23a. На фиг. 4, вследствие этого, функция блока 31 третьего фильтра для фильтрации следующего интервала текущего интервала выполняется второй фильтрующей частью 24. (В примерах, в которых 100% интервала обновления фильтруется дважды элементами 22 и 24, девиаторы всегда находятся в одном и том же состоянии разрешения обоим элементам 22 и 24 выполнять фильтрацию.)
Фиг. 5a иллюстрирует систему 50. Система 50 может содержать блок 51 первого фильтра (которым может быть, например, блок 12, выполненный так, как на фиг. 1 или 1a), блок 52 второго фильтра (которым может быть, например, блок 14, выполненный так, как на фиг. 1 или 1a) и/или блок 53 третьего фильтра и/или блок 54 четвертого фильтра (который может быть необязательным). В примерах некоторые из этих блоков фильтров могут быть одинаковыми (например, полученными с использованием одинаковых аппаратных средств) и отличаться друг от друга только входом и/или параметрами. Селектор 55 может направлять представление 11a сигнала информационного входного сигнала 11 на любые из блоков 51-54 фильтров на основе значений представления 11a сигнала и/или управляющих данных 11b.
В некоторых примерах блоки 51, 52 и 53 первого, второго и третьего фильтров могут быть получены, как на фиг. 4. Следовательно, блок 52 второго фильтра может также выполнять функции блока 53 третьего фильтра.
Блок 51 первого фильтра может реализовывать блок 12 первого фильтра и/или первую фильтрующую часть 22 и использоваться для фильтрации начального подынтервала текущего k-го интервала обновления с параметрами (изначально связанными с предыдущим (k-1)-м интервалом обновления), которые переходят из состояния большей фильтрации в состояние меньшей фильтрации. Блок 52 второго фильтра может реализовывать блок 14 второго фильтра и/или вторую фильтрующую часть 24 и использоваться для фильтрации начального подынтервала текущего интервала обновления с параметрами (фактически связанными с текущим k-м интервалом обновления), которые переходят из состояния меньшей фильтрации в состояние большей фильтрации. Блок 53 третьего фильтра может реализовывать третью фильтрующую секцию 31 для следующего интервала текущего интервала обновления.
Блок 54 четвертого фильтра может реализовывать фильтр для фильтрации начального подынтервала текущего k-го интервала обновления с параметрами, получаемыми путем интерполирования параметров для предыдущего (k-1)-го интервала обновления и параметров для текущего k-го интервала обновления.
Селектор 55 может выполнять операции:
- в начальном подынтервале () путем выбора из:
- операции фильтрации, основанной на комбинированном действии блока 51 первого фильтра и блока 52 второго фильтра;
- операции фильтрации, основанной на блоке 53 третьего фильтра; и
- операции фильтрации, основанной на блоке 54 четвертого фильтра;
- в следующем интервале путем использования блока 53 третьего фильтра.
В отношении решения для начального подынтервала селектор 55 может выполнять операции, например, путем использования первого и/или одного второго порога и/или условий (например, условий по коэффициенту усиления сигнала в следующем интервале обновления). Например, селектор 55 может выбирать:
- комбинированное действие блока 51 первого фильтра и блока 52 второго фильтра, когда расстояние между параметрами текущего k-го интервала обновления и параметрами предыдущего (k-1)-го интервала обновления велико, например, выше второго порога;
- действие блока 54 четвертого фильтра, только когда расстояние между параметрами текущего k-го интервала обновления и параметрами предыдущего (k-1)-го интервала обновления меньше (например, ниже второго порога); и/или
- действие блока 53 третьего фильтра, только когда расстояние между параметрами меньше, чем первый порог (который может быть меньше, чем второй порог), и/или когда параметры текущего k-го интервала обновления являются такими же, как параметры предыдущего (k-1)-го интервала обновления.
Второй порог может активно устанавливаться, например, как минимум между целочисленной частью задержки шага на текущем интервале обновления и целочисленной частью задержки шага на предыдущем интервале обновления.
Дополнительно или в качестве альтернативы, можно также использовать условие, основанное на коэффициенте усиления сигнала на предыдущем интервале обновления, чтобы использовать блок 54 четвертого фильтра, когда расстояние между коэффициентом усиления в установленном (текущем) интервале обновления и коэффициентом усиления в предыдущем интервале обновления меньше, чем первый и/или второй порог. В связи с этим, второй порог, а также условие по коэффициенту усиления может быть изменено в реальном времени, например, для получения лучших характеристик фильтрации.
Фиг. 5b иллюстрирует реализацию для LTP-постфильтра, в которой четвертый фильтр 54 не используется (он может содержать, например, блоки 12 и 14, выполненные так, как на фиг. 1 или 1a).
Фиг. 6 иллюстрирует способ 60, в котором «UI» означает «интервал обновления», а «SI» - «подынтервал». В соответствии со способом 60, может быть получен (например, из кодера) информационный входной сигнал 11 (x). В частности, сигнал 11 может содержать представление 11a сигнала (связанное, например, с аудиосигналом, подлежащим фильтрации) и управляющие данные 11b (которые могут содержать, например, параметры фильтра, связанные с текущим интервалом обновления).
На этапе S61 входной информационный сигнал (например, x, 11) может быть получен для (установленного) текущего k-го интервала обновления вместе с параметрами, связанными с текущим k-м интервалом обновления.
Затем операции 61 первого фильтра могут выполняться (например, любым из компонентов 12, 22, 51) для начального подынтервала текущего k-го интервала обновления путем зацикливания значения (индекса) n по множеству выборок начального подынтервала. На этапе S611 первая выборка начального подынтервала может учитываться путем инициализации переменной n (как n=0). На этапе S612 промежуточное значение y’[n] может быть получено с использованием параметров, связанных с предыдущим (k-1)-м интервалом обновления. На этапе 613 («последняя выборка начального SI?») проверяется, достигло ли n значения, связанного с последней выборкой начального подынтервала (например, проверяется, является ли n последним индексом начального подынтервала). Если n достигло последнего значения (индекса) начального подынтервала, операции 61 первого фильтра завершаются, и начинаются операции 62 второго фильтра. В иных случаях на этапе S614 («изменение параметров на начальном SI текущего k-го UI с состояния большей фильтрации на состояние меньшей фильтрации») параметры изменяются, чтобы переходить из состояния большей фильтрации в состояние меньшей фильтрации (например, путем снижения коэффициентов в блоке 23b на фиг. 2). На этапе S615 учитывается новая выборка (путем обновления индекса, например, на n=n+1), и этап S612 повторяется для нового индекса n.
Операции 62 второго фильтра могут выполняться (например, любым из компонентов 14, 24, 52) для начального подынтервала текущего k-го интервала обновления путем зацикливания значения (индекса) n по множеству выборок начального подынтервала. На этапе S621 первая выборка (из r n=0) начального подынтервала может учитываться путем инициализации переменной n на 0. На этапе S622 фильтрованное выходное значение y[n] может быть получено с использованием параметров, связанных с текущим k-м интервалом обновления. На этапе S623 («последняя выборка начального SI?») проверяется, достиг ли индекс n значения, связанного с последней выборкой начального подынтервала (например, проверяется, является ли n последним индексом начального подынтервала). Если индекс n достиг последнего значения начального подынтервала, операции 62 второго фильтра завершаются, и начинаются операции 63 третьего фильтра. В иных случаях на этапе S624 («изменение параметров на начальном SI текущего k-го UI с состояния меньшей фильтрации на состояние большей фильтрации») параметры изменяются, чтобы переходить из состояния меньшей фильтрации в состояние большей фильтрации (например, увеличением значения с 0 или значения, близкого к 0, на значение, более далекое от 0, например, путем повышения значения коэффициентов в блоке 23a). На этапе S625 учитывается новая выборка (n=n+1), и запускается этап S612.
Операции 63 третьего фильтра выполняются (например, любым из компонентов 31, 24, 53) для следующего (например, последнего) подынтервала текущего k-го интервала обновления путем зацикливания значения (индекса) n по множеству выборок следующего интервала. На этапе S632 фильтрованное выходное значение y[n] может быть получено с использованием параметров, связанных с текущим k-м интервалом обновления. На этапе 633, устанавливается, достиг ли индекс n значения, связанного с последней выборкой текущего k-го интервала обновления (например, проверяется, является ли n последним индексом интервала обновления). Если n достигло последнего значения интервала обновления, операции 63 третьего фильтра завершаются. В иных случаях на этапе S635 учитывается новая выборка (например, путем обновления индекса на n=n+1), и этап S632 повторяется с новым индексом n.
В конце способа получены все значения y[n] фильтрованного выходного сигнала. Значение индекса k может быть обновлено на этапе S64. Этап S61 может быть запущен вновь для (k+1)-го интервала обновления.
Следует отметить, что нет крайней необходимости, чтобы этап S61 следовал за любым из этапов S611-S63. В некоторых примерах информационный входной сигнал в текущем k-м интервале обновления мог также быть получен в течение обработки операций 61-63. В примерах информационный входной сигнал в текущем k-м интервале обновления мог быть получен априори.
В примерах, в которых первая и вторая операции фильтрации выполняются для 100% интервала обновления, операции 63 третьей фильтрации не выполняются.
Фиг. 7 иллюстрирует способ 70 («UI» означает «интервал обновления», а «SI» - «подынтервал»). Способ 70 может включать в себя этап S71 («Получение информационного входного сигнала x на k-м UI и параметров, связанных с k-м UI») на котором для текущего k-го интервала обновления могут быть получены сигнал x и параметры, связанные с сигналом x в текущем k-м интервале обновления.
На этапе S72 («Параметры для k-го UI и параметры для (k-1)-го UI одинаковы или их расстояние находится в пределах первого порога?»), выполняется первое сравнение: параметры для текущего k-го интервала обновления сравниваются с параметрами для предыдущего (k-1)-го интервала обновления (например, селектором 55). Если параметры одинаковы или расстояние между параметром k-го интервала обновления и параметром (k-1)-го интервала обновления находится в пределах первого (низкого) порога, на этапе S73 («Выполнение операций 63 третьей фильтрации без демпфирования коэффициентов на всем k-м UI») операции 63 третьей фильтрации выполняются с использованием - для текущего k-го интервала обновления (и начального подынтервала, и следующего подынтервала) - параметров, связанных с текущим k-м интервалом обновления (поскольку эти параметры одинаковы или почти одинаковы для двух последовательных интервалов обновления, их необходимо демпфировать или сглаживать: вследствие этого, можно применять третий фильтр 31 или 53 ко всему интервалу обновления, не отличая начальный подынтервал от следующего подынтервала). После этого на этапе S77 значение k обновляется, и теперь может фильтроваться новый (k+1)-й интервал обновления. Это решение может приниматься, например, любым из селекторов, изображенных, например, на фиг. 4 и 5.
Если расстояние между параметрами ниже первого порога, может выполняться вторая проверка: например, на этапе S74 («Находится ли расстояние между параметрами для k-го UI и параметрами для (k-1)-го UI в пределах второго порога? gk=0 или gk-1=0?») параметры для текущего k-го интервала обновления сравниваются с параметрами для предыдущего (k-1)-го интервала обновления (например, в селекторе 55). Параметры, проверяемые на этапе S74, могут также отличаться от параметров, проверяемых на этапе S72. Если расстояние между параметрами для текущего k-го интервала обновления и параметрами для предыдущего (k-1)-го интервала обновления находится в пределах второго порога (который может быть выше, чем первый порог), на этапе S75 («Выполнение операций четвертой фильтрации, интерполирующих параметры») операция четвертой фильтрации может выполняться (например, блоком 54 четвертого фильтра) на начальном подынтервале текущего k-го интервала обновления. В этом случае параметры, применяемые к начальному подынтервалу, могут быть получены путем интерполяции (и/или усреднения) параметров для предыдущего (k-1)-го интервала обновления и параметров для текущего k-го интервала обновления. После этого третья фильтрация 63 может выполняться на этапе S75’ («3-я фильтрация на следующем SI») для следующего интервала. После этого на этапе S77 («k=k+1») k обновляется, и теперь может фильтроваться новый (k+1)-й интервал обновления.
Если на этапе S74 устанавливается, что расстояние между параметрами для текущего k-го интервала обновления и параметрами для предыдущего (k-1)-го интервала обновления находится выше второго порога, на этапе S76 («Выполнение операций 61 и 62 первой и второй фильтрации на начальном SI k-го UI и выполнение операции 63 третьей фильтрации на следующем SI k-го UI») могут выполняться операции 61, 62, 63 первой, второй и третьей фильтрации (например, элементами 12, 14, 22, 24, 31, 51, 52 и/или 53): вследствие этого, первый подынтервал текущего интервала обновления может фильтроваться первым любым из 12, 22, 51 и/или 61, а затем любым из 14, 24, 52 и/или 62, а следующий подынтервал фильтруется с использованием любого из 31, 53 и/или 63. После этого на этапе S77 k обновляется, и может фильтроваться новый (k+1)-й интервал обновления.
В примерах дополнительно или в качестве альтернативы может устанавливаться по меньшей мере еще одно условие (в некоторых случаях на этапе S74). В некоторых примерах предусматривается, что с целью инициирования этапа S76 условие должно проверяться. В примерах условие на этапе S74 может включать в себя по меньшей мере одно из следующего:
- Если коэффициент усиления установленного (текущего) интервала обновления равен нулю (gk=0), то первый фильтр используется, второй фильтр не используется, и третий фильтр не используется (и в случае, если это предусмотрено, четвертый фильтр не используется).
- Если коэффициент усиления предыдущего интервал обновления равен нулю (gk-1=0), то первый фильтр не используется, второй фильтр используется, третий фильтр используется (и в случае, если это предусмотрено, четвертый фильтр не используется).
- Если коэффициенты усиления и предыдущего, и текущего интервалов обновления отличаются от нуля (gk-1≠0 и gk≠0), то используемое зависит от других параметров (например, в некоторых примерах можно посмотреть на разность целочисленной и/или дробной частей задержек шага).
В некоторых примерах этап S74 может выполняться перед этапом S72.
В некоторых примерах выполняется только одно сравнение. Следовательно, имеются примеры, в которых отсутствуют этапы S72 и S73, и имеются примеры, в которых отсутствуют этапы S74 и S75.
В некоторых примерах выполняется только одно сравнение. Следовательно, имеются примеры, в которых отсутствуют этапы S72 и S73, и имеются примеры, в которых отсутствуют этапы S74 и S75.
В примерах первый и/или второй порог (пороги) (или иные условия по параметрам, например, по коэффициенту усиления) для первого и/или второго этапов S72, S74 может (могут) быть получен в реальном времени, например, по значениям параметров.
В некоторых примерах, относящихся к LTP-фильтру, второй порог может являться порогом расстояния задержки шага, задаваемым, чтобы использовать блок 54 четвертого фильтра (и/или интерполяцию), когда расстояние (например, модуль разности) между параметрами текущего k-го интервала обновления и параметрами предыдущего (k-1)-го интервала обновления меньше, чем минимум между целочисленной частью задержки шага, связанной с k-м интервалом обновления, и целочисленной частью задержки шага, связанной с (k-1)-м интервалом обновления. Следовательно, второе сравнение на этапе S74 может иметь вид:

где  - целочисленные части задержки шага в интервалах обновления k и k-1 соответственно. В связи с этим, второе сравнение на этапе S74 может в некоторых примерах проверять, применяются ли оба нижеследующих условия:
- целочисленные части задержки шага в интервалах обновления k и k-1 соответственно. В связи с этим, второе сравнение на этапе S74 может в некоторых примерах проверять, применяются ли оба нижеследующих условия:

 ,
,
Следовательно, второе сравнение на этапе S74 таково, что с целью выполнения фильтрации с помощью блока 54 четвертого фильтра необходимо, чтобы целочисленный шаг не повышался (от (k-1)-го интервала обновления до k-го интервала обновления) для более чем 100% и не снижался для более чем 50%: т.е., чтобы отсутствовал шаг, который увеличивается или сокращается вдвое между предыдущим интервалом обновления и текущим интервалом обновления.
Аналогичным образом, второе сравнение на этапе S74 таково, что первая и вторая фильтрация (например, с использованием любого из элементов 12, 14, 51, 52 и т.д.) может запускаться, когда устанавливается, что

что означает, что проверяется по меньшей мере одно из двух следующих условий:

 ,
,
Следовательно, блоки первого и второго фильтра могут быть активированы (например, селектором 55), когда целочисленная часть задержки шага в текущем k-м интервале обновления значительно изменяется по отношению к целочисленной части задержки шага в предыдущем (k-1)-м интервале обновления.
Может устанавливаться еще одно условие. Например, этап S74 может предусматривать, что с целью выполнение операций 61 и 62 первой и второй фильтрации (например, с помощью блока 12 и 14 первого и второго фильтра) должно проверяться по меньшей мере одно из нижеследующих условий:
Когда , может быть получен эффект, который аналогичен пропуску первого фильтра. Когда  , может быть получен эффект, который аналогичен пропуску второго фильтра.
, может быть получен эффект, который аналогичен пропуску второго фильтра.
Условие может быть таким, что если проверяются оба нижеследующих условия:
то в этом случае разность между целочисленными частями задержек шага (текущего и предыдущего кадров) проверяется на этапе S74 (например, как указано выше).
В этом примере можно увидеть, что:
1) Если параметры между текущим интервалом обновления и предыдущим интервалом одинаковы, для текущего интервала обновления используется тот же фильтр, что и для предыдущего интервала обновления (блок 53 третьего фильтра);
2) Если параметры текущего интервала обновления и параметры предыдущего интервала обновления значительно отличаются или если по меньшей мере один из коэффициентов усиления равен нулю, предпочтительно использовать первый и второй фильтры (12, 24, 14, 24, 51, 52, 61, 62);
3) Если коэффициенты усиления и текущего, и предыдущего интервала обновления отличаются от 0, то по задержке шага определяется, какой фильтр должен использоваться.
Примечательно, что (2) увеличивает качество по сравнению с (1) и (3). (2) имеет более низкую сложность, чем предшествующий уровень техники.
В некоторых примерах блок 54 четвертого фильтра не используется, и вследствие этого вторая проверка на этапе S74 не выполняется, при этом может выполняться только сравнение с чрезвычайно малым порогом (или сравнение по точному значению).
Другие примеры (например, не LTP-фильтры) могут основываться на других параметрах. Однако настоящий способ действует для любого IIR-фильтра.
Вообще говоря, если имеется разность параметров, то используются первый и второй фильтры. В иных случаях в начальном подынтервале используется третий фильтр.
Настоящее решение может использоваться, например, когда LPC-параметры изменяются в кодеке Линейного Предсказания с Управлением (CELP). Тем самым прерывания, которые существуют даже после субкадра на основе интерполяции линейной спектральной частоты (LSF), в CELP могут регулироваться. Еще одним примером, где может использоваться этот метод, является фильтрация для улучшения формата в CELP-кодеках.
Фиг. 8 и 9 иллюстрируют элементы системы (систем) кодирования/декодирования.
Фиг. 8 иллюстрирует пример прибора 80 для кодирования информационного сигнала в цифровом формате из аудиосигнала 81.
Прибор 80 может содержать, например, необязательный префильтр 81a, который может управляться, например, как любая из систем 10, 30, 40 и 50, и который может осуществлять любой из способов, описываемых выше и/или ниже. В других примерах прибор 80 может быть исключен.
Прибор 80 может содержать блок 82 кадрирования. Прибор 80 может содержать преобразователь 83 области, который может преобразовывать представление информационного сигнала в TD (временной области) в представление информационного сигнала в FD (частотной области). Например, преобразователь 83 может представлять собой блок Модифицированного Дискретного Косинусного Преобразования (MDCT) или блок 83 Модифицированного Дискретного Синусного Преобразования (MDST) (или блок, связанный с другим преобразованием с перекрытием) после блока 82 кадрирования, например, для преобразования в частотную область (FD). Прибор 80 может содержать блок 84 Временного Формирования Шума (TNS) для управления временной формой шума квантования в пределах окна преобразования. Прибор 80 может содержать блок 85 формирователя шума частотной области (FDNS). Прибор 80 может содержать блок 87 для получения параметров FDNS после блока 82 кадрирования. Прибор 80 может содержать блок 86 квантования, который может также содержать энтропийный кодер. Прибор 80 может содержать блок 88 TD/TD (Обнаружитель Импульсных Помех Временной Области).
Прибор 80 может содержать LTP-блок 89 для получения LTP-параметров (например, информации о гармоничности, информации о коэффициенте усиления, информации о шаге, такой как задержка шага, и т.д.). По меньшей мере некоторые из параметров, получаемых LTP-блоком 89, могут использоваться устройствами 10, 30, 40, 50 и/или способами 60 и/или 70 для каждого k-го интервала обновления сигнала. Например, параметрами для k-го интервала обновления могут быть задержка шага и коэффициент усиления (который в некоторых случаях необязателен и может оцениваться на стороне декодера), связанные с сигналом в k-м интервале обновления. Операции LTP-блока 89 могут быть независимыми от операций префильтра 81a: префильтр 81a может также отсутствовать, но LTP-блок 89 может выполнять операции правильно путем выдачи параметров на сторону декодера.
Сигнал может кодироваться устройством 89’ записи битового потока и может сохраняться в памяти и/или передаваться в декодер (например, беспроводным способом, например, с использованием стандартного протокола, такого как Bluetooth).
Фиг. 9 иллюстрирует прибор 90 для кодирования сигнальной информации, который может получать цифровой аудиосигнал (например, с использованием устройства 91’ считывания битового потока с передачей от кодера, такого как прибор 80, или с сохранением в нем). Прибор 90 может содержать по меньшей мере один из элементов 10, 12, 14, 20, 22, 24, 31, 40, 50 и/или реализовывать любой из способов 60 и/или 70 для каждого k-го интервала обновления сигнала для выдачи декодированного и фильтрованного выходного сигнала 15. В частности, прибор 90 может содержать LTP-постфильтр 91, который может реализовывать выполнение любого из фильтрующих действий, связанных с элементами 12, 14, 22, 24, 31, 40, 51-54, 61-63 и 70. Прибор 90 может содержать блок 92 деквантизации, который может также содержать энтропийный декодер. Прибор 90 может содержать FDNS-блок 93, который может принимать параметры от декодера 94 FDNS-параметров. Прибор 90 может содержать TNS-блок 95 после FDNS-блока 93. Прибор 90 может содержать преобразователь 96 области, который может преобразовывать представление первой области (например, представление FD-области) информационного сигнала в представление второй области (например, TD-представление) информационного сигнала. Преобразователь 96 может представлять собой блок обратного MDCT или обратного MDST (или блок, связанный с другим преобразованием с перекрытием) для преобразования во временную область из частотной области. Прибор 90 может содержать блок 97 кадрирования и наложения и суммирования (OLA), который может принимать параметры из TD/TD-блока 88.
LTP-постфильтр 91 может получать цифровое представление 11a (x) подлежащего фильтрации сигнала, например, из блока 97. LTP-постфильтр 91 может получать коэффициенты 11b, например, из битового потока.
По меньшей мере одна из систем 80 и/или 90 может выполнять операцию анализа (например, в блоке 89) для получения параметров, связанных с k-м и/или (k+1)-м интервалом обновления.
Цифровой входной информационный сигнал  (11a) может фильтроваться с помощью изменяющегося во времени фильтра, параметры которого изменяются в интервале T обновления (например, текущем k-м интервале обновления), создавая фильтрованный выходной сигнал
(11a) может фильтроваться с помощью изменяющегося во времени фильтра, параметры которого изменяются в интервале T обновления (например, текущем k-м интервале обновления), создавая фильтрованный выходной сигнал  . Интервал T обновления может также быть адаптируемым к сигналу и тем самым T может изменяться во времени. Можно рассмотреть фильтры, которые могут быть представлены как Линейный Неизменяющийся во Времени (LTI) Фильтр с бесконечной импульсной характеристикой (IIR) в течение временного интервала T. Временной интервал T может представлять собой кадр (например, текущий фильтр, рассмотренный выше) или подкадр цифрового сигнала. Можно использовать термин «кадр» и/или «интервал обновления» и для кадра, и для подкадра.
. Интервал T обновления может также быть адаптируемым к сигналу и тем самым T может изменяться во времени. Можно рассмотреть фильтры, которые могут быть представлены как Линейный Неизменяющийся во Времени (LTI) Фильтр с бесконечной импульсной характеристикой (IIR) в течение временного интервала T. Временной интервал T может представлять собой кадр (например, текущий фильтр, рассмотренный выше) или подкадр цифрового сигнала. Можно использовать термин «кадр» и/или «интервал обновления» и для кадра, и для подкадра.
LTI IIR фильтр (который может также быть представлен как ) может быть приведен в виде:
или с использованием линейного дифференциального уравнения:
Коэффициенты - параметры фильтра (например, параметры, сохраняемые, например, в запоминающих элементах 21a и 21b). LTI IIR фильтр может быть однозначно определен своими коэффициентами (параметрами). Фиг. 10 иллюстрирует интервал T обновления применительно к фильтру Hk (например, в текущем k-м интервале обновления) и предыдущий интервал применительно к фильтру Hk-1.
Рассмотрим изменяющийся во времени фильтр, который в интервале обновления равен LTI IIR фильтру :

Вместо мгновенного изменения параметров фильтра на границе между интервалами  обновления обработаем часть в начале интервала
обновления обработаем часть в начале интервала  обновления с помощью нового набора изменяющихся во времени фильтров:
обновления с помощью нового набора изменяющихся во времени фильтров:
1. Если (этап S72) параметры фильтра одинаковы (или разница чрезвычайно мала), выполняется фильтрация с помощью фильтра  (этап S73);
(этап S73);
2. Если (этап S74) расстояние между параметрами фильтра мало (например, в пределах второго порога, проверяемого на этапе S74), параметры фильтра интерполируются (S75) выборка за выборкой, и начальная часть интервала обновления фильтруется с использованием интерполированных параметров;
3. Если (этап S74) расстояние между параметрами фильтра велико (например, больше, чем второй порог) (этап S76), начальная часть длины сначала фильтруется с помощью фильтра  (например, в таких элементах, как 12, 22, 51), а затем с помощью
(например, в таких элементах, как 12, 22, 51), а затем с помощью  (например, в таких элементах, как 14, 24, 52), определяемого следующим образом:
(например, в таких элементах, как 14, 24, 52), определяемого следующим образом:

 может являться промежуточным выходом блока 12 первого фильтра, например, на фиг. 1.
может являться промежуточным выходом блока 12 первого фильтра, например, на фиг. 1.  может представлять собой коэффициенты масштабирования элемента 23b (фиг. 2) для снижения значений ak-1,i и bk-1,i параметра (которые сохранены в запоминающем элементе 21b). может представлять собой коэффициенты масштабирования, сохраненные в элементе 23a, для снижения значений параметр элемента 23a (фиг. 2) для снижения значений ak и bk параметра (которые сохранены в запоминающем элементе 21b).
может представлять собой коэффициенты масштабирования элемента 23b (фиг. 2) для снижения значений ak-1,i и bk-1,i параметра (которые сохранены в запоминающем элементе 21b). может представлять собой коэффициенты масштабирования, сохраненные в элементе 23a, для снижения значений параметр элемента 23a (фиг. 2) для снижения значений ak и bk параметра (которые сохранены в запоминающем элементе 21b).
Пример  приведен на фиг. 11, где T означает текущий k-й интервал обновления. Операции 61 и 62 первой и второй фильтрации могут применяться по меньшей мере к начальному подынтервалу , в то время как операция 63 третьей фильтрации применяется к
приведен на фиг. 11, где T означает текущий k-й интервал обновления. Операции 61 и 62 первой и второй фильтрации могут применяться по меньшей мере к начальному подынтервалу , в то время как операция 63 третьей фильтрации применяется к  . Как можно увидеть, в уменьшается, в то время как непрерывно возрастает: это связано с тем, что параметры предыдущего (k-1)-го интервала обновления, применяемые к входному сигналу, непрерывно уменьшаются, в то время как параметры настоящего k-го интервала T обновления непрерывно увеличиваются до максимального значения, которое в следующем интервале постоянно. В связи с этим, можно получить плавный переход от (k-1)-го интервала обновления к k-му интервалу обновления.
. Как можно увидеть, в уменьшается, в то время как непрерывно возрастает: это связано с тем, что параметры предыдущего (k-1)-го интервала обновления, применяемые к входному сигналу, непрерывно уменьшаются, в то время как параметры настоящего k-го интервала T обновления непрерывно увеличиваются до максимального значения, которое в следующем интервале постоянно. В связи с этим, можно получить плавный переход от (k-1)-го интервала обновления к k-му интервалу обновления.
На фиг. 11 можно также увидеть, где может быть реализована третья фильтрация 62 (например, осуществляемая третьим блоком 53). Третья фильтрация может быть определена следующим образом:

Система, описанная в [3], может использоваться в качестве основы, включая Обнаружитель Импульсных Помех Временной Области (TD TD), Кадрирование, MDCT, TNS, FDNS, OLA, Квантование, Арифметический Кодер и LTP-постфильтрацию (см. блоки 82-89 и 92-97 выше). Модификация может быть реализована в LTP-постфильтре, и, следовательно, подробности LTP будут описаны.
Вообще говоря, LTP можно рассматривать как постфильтр гармоник для фильтрации представления информационного сигнала. Он может основываться на передаточной функции, содержащей числитель и знаменатель, при этом числитель может содержать значение коэффициента усиления, указанное в информации о коэффициенте усиления, а знаменатель может содержать целочисленную часть задержки шага, указанной в информации о задержке шага, и многоотводного фильтра, зависящего от дробной части задержки шага. В примерах передаточная функция постфильтра содержит в числителе дополнительный многоотводный FIR-фильтр для нулевой дробной части задержки шага. В примерах знаменатель содержит произведение многоотводного фильтра и значения коэффициента усиления. В примерах числитель может дополнительно содержать произведение первого скалярного значения и второго скалярного значения, при этом знаменатель содержит второе скалярное значение, а не первое скалярное значение, при этом первое и второе скалярные значения предустановлены и имеют значения, большие или равные 0 и меньшие или равные 1, и при этом второй скалярное значение может быть меньше, чем первое скалярное значение.
Пример LTP-фильтра приведен ниже (см. также фиг. 13).
На стороне кодера (например, прибор 80) может использоваться вычисление LTP-параметра, как описано в [14]:
1. Оценка шага
Оценивается одна задержка шага (целочисленная часть+дробная часть) на кадр (размер кадра составляет, например, 20 мс). Один кадр может составлять, например, один интервал обновления. Это может осуществляться в два этапа для снижения сложности и повышения точности оценки.
a. Первая оценка целочисленной части задержки шага
Используется процедура анализа шага, которая создает плавный контур изменения шага (например, анализ шага без обратной связи, описанный в [15], раздел 6.6). Этот анализ, как правило, проводится по подкадрам (размер подкадра составляет, например, 10 мс) и дает одну оценку задержки шага на подкадр. Необходимо отметить, что эти оценки задержки шага не имеют какой-либо дробной части и, как правило, оцениваются по сигналу с пониженной частотой дискретизации (частота дискретизации, например, 6400 Гц). Используемый сигнал может представлять собой любой аудиосигнал, например, входной сигнал или взвешенный с LPC аудиосигнал, как описано в [15], раздел 6.5.
b. Уточнение целочисленной части задержки шага
Окончательная целочисленная часть задержки шага оценивается по аудиосигналу x[n] при базовой частоте дискретизации кодера, которая, как правило, выше, чем частота дискретизации сигнала с пониженной частотой дискретизации, используемого в «a.» (например 12,8 кГц, 16 кГц, 32 кГц…). Сигналом x[n] может быть любой аудиосигнал, например, взвешенный с LPC аудиосигнал.
Целочисленная часть задержки шага при этом представляет собой задержку  , которая максимизирует функцию автокорреляции
, которая максимизирует функцию автокорреляции
при этом  вокруг задержки шага оценивается на этапе 1.a.
вокруг задержки шага оценивается на этапе 1.a.

с. Оценка дробной части задержки шага
Дробная часть может быть найдена путем интерполяции функции  автокорреляции, вычисляемой на этапе 1.b. и выбора дробной задержки шага, которая максимизирует интерполированную функцию автокорреляции. Интерполяция может выполняться с использованием фильтра нижних частот с Конечной импульсной характеристикой (FIR), как описано, например, в [15], раздел 6.6.7.
автокорреляции, вычисляемой на этапе 1.b. и выбора дробной задержки шага, которая максимизирует интерполированную функцию автокорреляции. Интерполяция может выполняться с использованием фильтра нижних частот с Конечной импульсной характеристикой (FIR), как описано, например, в [15], раздел 6.6.7.
2. Оценка коэффициента усиления и квантование
Коэффициент усиления может оцениваться по входному аудиосигналу на базовой частоте дискретизации кодера, но это может быть также любой аудиосигнал, такой как Взвешенный с LPC аудиосигнал. Этот сигнал обозначается y[n] и может быть таким же, как x[n], или отличаться от него.
Предсказание yP[n] для y[n] может быть найдено сначала путем фильтрации y[n] с помощью следующего фильтра

где - целочисленная часть задержки шага (оцененная на этапе 1.b.), а - фильтр нижних частот с FIR, коэффициенты которого зависят от дробной часть задержки  шага (оцененной на этапе 1.c.).
шага (оцененной на этапе 1.c.).
Один пример B(z), когда разрешение задержки шага составляет 1/4:




Коэффициент усиления при этом вычисляется следующим образом:
и ограничивается между 0 и 1.
Наконец, коэффициент усиления квантуется, например, с двумя битами с использованием, например, равномерного квантования.
Может использоваться LTP-постфильтр из [14] (пример передаточной функции приведен на фиг. 13.):
параметры которого определяются по параметрам, оцениваемым на стороне кодера и декодированным из битового потока. - декодированный коэффициент усиления, - целочисленная и дробная часть декодированной задержки шага, два скаляра, которые взвешивают коэффициент усиления, а фильтр нижних частот с FIR, коэффициенты которого зависят от дробной части декодированной задержки шага. Порядок и коэффициенты могут также зависеть от скорости передачи битов и выходной частоты дискретизации. Для каждой комбинации скорости передачи битов и выходной частоты дискретизации может быть выполнена и настроена своя частотная характеристика.
Отличием в LTP-постфильтре от [14] может быть переход от одного кадра к следующему. LTP-постфильтром, используемым в конечной части кадра  , является
, является  :
:


а в конечной части кадра - :





При этом  определяется в нижеследующей таблице:
определяется в нижеследующей таблице:
В начальной части кадра (текущего k-го кадра или интервала обновления) могут существовать три возможности:
1. (этап S73): Если параметры одинаковы, а именно:  ,
,  ,
,  , начальная часть кадра фильтруется ;
, начальная часть кадра фильтруется ;
2. (этап S75): Если разность между параметрами мала, например,  , начальная часть длины
, начальная часть длины  кадра фильтруется изменяющимся во времени фильтром с использованием интерполированных параметров:
кадра фильтруется изменяющимся во времени фильтром с использованием интерполированных параметров:





3. (этап S76): Если разность между параметрами велика, начальная часть длины кадра сначала фильтруется фильтром :

а затем - :

Для случаев, в которых сложность важнее, чем качество, возможность «3.» используется всегда, когда удовлетворяется по меньшей мере одно из  ,
,  ,
,  . Некоторые из этих условий могут быть более важными, чем некоторые другие, в соответствии с конкретными примерами. В некоторых примерах разность в шаге является важнейшим проверяемым условием для выбора между возможностями «2.» и «3.».
. Некоторые из этих условий могут быть более важными, чем некоторые другие, в соответствии с конкретными примерами. В некоторых примерах разность в шаге является важнейшим проверяемым условием для выбора между возможностями «2.» и «3.».
Пример применений представленных выше уравнений для LTP-постфильтра приведен ниже со ссылкой на фиг. 7a и способ 700. Параметры могут содержать коэффициент gk усиления, целочисленную часть шага Tint,k и дробную часть шага Tfr,k. В некоторых из этих примеров селектор 55 может выполнять операции таким образом, что:
- Если gk-1 (коэффициент усиления) равен нулю, и gk также равен нулю (S702), то фильтрация отсутствует (S704), поскольку:
 ,
,
в силу того, что  ; и
; и

в силу того, что ;
(применительно к фиг. 1a могут шунтироваться блоки 12 и 14 и первого, и второго фильтра)
- Если gk-1=0 и gk≠0 (S706), то (S708)
- первая фильтрация отсутствует, поскольку  в силу того, что ;
в силу того, что ;
- имеется вторая фильтрация в в виде 
- имеется третья фильтрация в следующем подынтервале  (где ≠ ) в виде
(где ≠ ) в виде 
(применительно к фиг. 1a шунтируется только блок 12 первого фильтра);
- Если gk-1≠0 и gk=0 (S710), то (S712)
- имеется первая фильтрация в в виде 
- вторая фильтрация отсутствует, поскольку , в силу того, что ;
- третья фильтрация отсутствует, поскольку  , в силу того, что ;
, в силу того, что ;
- (применительно к фиг. 1a шунтируется только блок 14 второго фильтра);
- Если gk-1≠0 и gk≠0 (714), то изучается разность целочисленной и дробной части задержки шага (S716, «Tint,k=Tint,k-1 и Tfr,k-1=Tfr,k?»):
- Если целочисленная и дробная части задержки шага в k-1 и k одинаковы (Tint,k=Tint,k и Tfr,k-1=Tfr,k), то (S718):
- нет ни первой фильтрации, ни второй фильтрации в силу выбора, осуществляемого селектором (например, на этапе S72);
- имеется третья фильтрация на 100% интервала обновления в виде  ;
;
- в иных случаях если имеется разность в целочисленной или в дробной части задержки шага (S720):
- имеется первая фильтрация в в виде ;
- имеется вторая фильтрация в  в виде ;
в виде ;
(применительно к фиг. 1a не шунтируется ни один из блоков 12 и 14 фильтра)
- имеется третья фильтрация в следующем подынтервале (где  ) в виде .
) в виде .
Примечательно, что когда устанавливается (например, селектором 55), что первая и/или вторая фильтрация не будет выполняться (или будет выдавать на выходе то же значение, что и на входе, в основном, действуя, как «тождественный фильтр», который, как правило, бесполезен), можно шунтировать бесполезный блок и/или секцию фильтрации (например, как на фиг. 1a). В связи с этим, число вычислений уменьшается.
В данном документе представлено рассмотрение операций фильтров для LTP-постфильтра. Декодированный сигнал после синтеза MDCT или MDST (или любого другого преобразования с перекрытием) проходит постфильтрацию во временной области с использованием IIR-фильтра, параметры которого зависят от данных битового потока LTPF, возможно, например, «pitch_index» и/или «ltpf_active» (последнее активирует/деактивирует операцию LTP-постфильтра). Чтобы исключить прерывание, когда параметры переходят из одного кадра в следующий, механизм перехода может применяться на первой четверти текущего кадра.
LTPF IIR постфильтр может быть реализован с использованием (см. также выше):

где - входной сигнал фильтра (т.е., декодированный сигнал после синтеза MDCT или MDST), а - выходной сигнал фильтра.
Целочисленная часть  и дробная часть
и дробная часть  задержки шага LTPF могут вычисляться следующим образом. Первая задержка шага (например, при 12,8 кГц) может быть восстановлена с использованием
задержки шага LTPF могут вычисляться следующим образом. Первая задержка шага (например, при 12,8 кГц) может быть восстановлена с использованием

Задержка шага может затем масштабироваться в выходную частоту  дискретизации и преобразовываться в целочисленную и дробную части с использованием
дискретизации и преобразовываться в целочисленную и дробную части с использованием


где Fs - частота дискретизации.
Коэффициенты фильтра могут быть вычислены следующим образом


при

а  могут быть получены в некоторых примерах в соответствии с такими процедурами, как:
могут быть получены в некоторых примерах в соответствии с такими процедурами, как:
fs_idx=min(4,( /8000-1));
if (nbits < 320+fs_idx*80)
{
gain_ltpf=0.4;
gain_ind=0;
}
else if (nbits < 400+fs_idx*80)
{
gain_ltpf=0.35;
gain_ind=1;
}
else if (nbits < 480+fs_idx*80)
{
gain_ltpf=0.3;
gain_ind=2;
}
else if (nbits < 560+fs_idx*80)
{
gain_ltpf=0.25;
gain_ind=3;
}
else
{
gain_ltpf=0;
}
Таблицы  предустановлены. Возможны некоторые примеры (вместо «fs», используется фактическая полоса частот):
предустановлены. Возможны некоторые примеры (вместо «fs», используется фактическая полоса частот):
double tab_ltpf_num_8000[4][3] = {
{6.023618207009578e-01,4.197609261363617e-01,-1.883424527883687e-02},
{5.994768582584314e-01,4.197609261363620e-01,-1.594928283631041e-02},
{5.967764663733787e-01,4.197609261363617e-01,-1.324889095125780e-02},
{5.942410120098895e-01,4.197609261363618e-01,-1.071343658776831e-02}};
double tab_ltpf_num_16000[4][3] = {
{6.023618207009578e-01,4.197609261363617e-01,-1.883424527883687e-02},
{5.994768582584314e-01,4.197609261363620e-01,-1.594928283631041e-02},
{5.967764663733787e-01,4.197609261363617e-01,-1.324889095125780e-02},
{5.942410120098895e-01,4.197609261363618e-01,-1.071343658776831e-02}};
double tab_ltpf_num_24000[4][5] = {
{3.989695588963494e-01,5.142508607708275e-01,1.004382966157454e-01,-1.278893956818042e-02,-1.572280075461383e-03},
{3.948634911286333e-01,5.123819208048688e-01,1.043194926386267e-01,-1.091999960222166e-02,-1.347408330627317e-03},
{3.909844475885914e-01,5.106053522688359e-01,1.079832524685944e-01,-9.143431066188848e-03,-1.132124620551895e-03},
{3.873093888199928e-01,5.089122083363975e-01,1.114517380217371e-01,-7.450287133750717e-03,-9.255514050963111e-04}};
double tab_ltpf_num_32000[4][7] = {
{2.982379446702096e-01,4.652809203721290e-01,2.105997428614279e-01,3.766780380806063e-02,-1.015696155796564e-02,-2.535880996101096e-03,-3.182946168719958e-04},
{2.943834154510240e-01,4.619294002718798e-01,2.129465770091844e-01,4.066175002688857e-02,-8.693272297010050e-03,-2.178307114679820e-03,-2.742888063983188e-04},
{2.907439213122688e-01,4.587461910960279e-01,2.151456974108970e-01,4.350104772529774e-02,-7.295495347716925e-03,-1.834395637237086e-03,-2.316920186482416e-04},
{2.872975852589158e-01,4.557148886861379e-01,2.172126950911401e-01,4.620088878229615e-02,-5.957463802125952e-03,-1.502934284345198e-03,-1.903851911308866e-04}};
double tab_ltpf_num_48000[4][11] = {
{1.981363739883217e-01,3.524494903964904e-01,2.513695269649414e-01,1.424146237314458e-01,5.704731023952599e-02,9.293366241586384e-03,-7.226025368953745e-03,-3.172679890356356e-03,-1.121835963567014e-03,-2.902957238400140e-04,-4.270815593769240e-05},
{1.950709426598375e-01,3.484660408341632e-01,2.509988459466574e-01,1.441167412482088e-01,5.928947317677285e-02,1.108923827452231e-02,-6.192908108653504e-03,-2.726705509251737e-03,-9.667125826217151e-04,-2.508100923165204e-04,-3.699938766131869e-05},
{1.921810055196015e-01,3.446945561091513e-01,2.506220094626024e-01,1.457102447664837e-01,6.141132133664525e-02,1.279941396562798e-02,-5.203721087886321e-03,-2.297324511109085e-03,-8.165608133217555e-04,-2.123855748277408e-04,-3.141271330981649e-05},
{1.894485314175868e-01,3.411139251108252e-01,2.502406876894361e-01,1.472065631098081e-01,6.342477229539051e-02,1.443203434150312e-02,-4.254449144657098e-03,-1.883081472613493e-03,-6.709619060722140e-04,-1.749363341966872e-04,-2.593864735284285e-05}};
double tab_ltpf_den_16000[4][5] = {
{0.000000000000000e+00, 2.098804630681809e-01, 5.835275754221211e-01, 2.098804630681809e-01, 0.000000000000000e+00},
{0.000000000000000e+00, 1.069991860896389e-01, 5.500750019177116e-01, 3.356906254147840e-01, 6.698858366939680e-03},
{0.000000000000000e+00, 3.967114782344967e-02, 4.592209296082350e-01, 4.592209296082350e-01, 3.967114782344967e-02},
{0.000000000000000e+00, 6.698858366939680e-03, 3.356906254147840e-01, 5.500750019177116e-01, 1.069991860896389e-01}};
double tab_ltpf_den_24000[4][7] = {
{0.000000000000000e+00, 6.322231627323796e-02, 2.507309606013235e-01, 3.713909428901578e-01, 2.507309606013235e-01, 6.322231627323796e-02, 0.000000000000000e+00},
{0.000000000000000e+00, 3.459272174099855e-02, 1.986515602645028e-01, 3.626411726581452e-01, 2.986750548992179e-01, 1.013092873505928e-01, 4.263543712369752e-03},
{0.000000000000000e+00, 1.535746784963907e-02, 1.474344878058222e-01, 3.374259553990717e-01, 3.374259553990717e-01, 1.474344878058222e-01, 1.535746784963907e-02},
{0.000000000000000e+00, 4.263543712369752e-03, 1.013092873505928e-01, 2.986750548992179e-01, 3.626411726581452e-01, 1.986515602645028e-01, 3.459272174099855e-02}};
double tab_ltpf_den_32000[4][9] = {
{0.000000000000000e+00, 2.900401878228730e-02, 1.129857420560927e-01, 2.212024028097570e-01, 2.723909472446145e-01, 2.212024028097570e-01, 1.129857420560927e-01, 2.900401878228730e-02, 0.000000000000000e+00},
{0.000000000000000e+00, 1.703153418385261e-02, 8.722503785537784e-02, 1.961407762232199e-01, 2.689237982237257e-01, 2.424999102756389e-01, 1.405773364650031e-01, 4.474877169485788e-02, 3.127030243100724e-03},
{0.000000000000000e+00, 8.563673748488349e-03, 6.426222944493845e-02, 1.687676705918012e-01, 2.587445937795505e-01, 2.587445937795505e-01, 1.687676705918012e-01, 6.426222944493845e-02, 8.563673748488349e-03},
{0.000000000000000e+00, 3.127030243100724e-03, 4.474877169485788e-02, 1.405773364650031e-01, 2.424999102756389e-01, 2.689237982237257e-01, 1.961407762232199e-01, 8.722503785537784e-02, 1.703153418385261e-02}};
double tab_ltpf_den_48000[4][13] = {
{0.000000000000000e+00, 1.082359386659387e-02, 3.608969221303979e-02, 7.676401468099964e-02, 1.241530577501703e-01, 1.627596438300696e-01, 1.776771417779109e-01, 1.627596438300696e-01, 1.241530577501703e-01, 7.676401468099964e-02, 3.608969221303979e-02, 1.082359386659387e-02, 0.000000000000000e+00},
{0.000000000000000e+00, 7.041404930459358e-03, 2.819702319820420e-02, 6.547044935127551e-02, 1.124647986743299e-01, 1.548418956489015e-01, 1.767122381341857e-01, 1.691507213057663e-01, 1.352901577989766e-01, 8.851425011427483e-02, 4.499353848562444e-02, 1.557613714732002e-02, 2.039721956502016e-03},
{0.000000000000000e+00, 4.146998467444788e-03, 2.135757310741917e-02, 5.482735584552816e-02, 1.004971444643720e-01, 1.456060342830002e-01, 1.738439838565869e-01, 1.738439838565869e-01, 1.456060342830002e-01, 1.004971444643720e-01, 5.482735584552816e-02, 2.135757310741917e-02, 4.146998467444788e-03},
{0.000000000000000e+00, 2.039721956502016e-03, 1.557613714732002e-02, 4.499353848562444e-02, 8.851425011427483e-02, 1.352901577989766e-01, 1.691507213057663e-01, 1.767122381341857e-01, 1.548418956489015e-01, 1.124647986743299e-01, 6.547044935127551e-02, 2.819702319820420e-02, 7.041404930459358e-03}};
Можно рассмотреть пять различных случаев:
1. Первый случай: ltpf_active=0 и mem_ltpf_active=0 (при этом «mem_ltpf_active» означает состояние активации/деактивации в предыдущем кадре):

где NF означает число выборок, обрабатываемых в одном кадре, иначе называемое размером кадра.
2. Второй случай: ltpf_active=1 и mem_ltpf_active=0

3. Третий случай: ltpf_active=0 и mem_ltpf_active=1
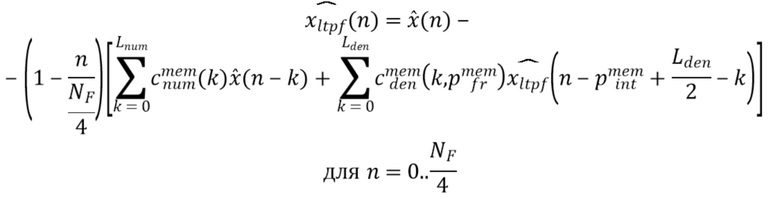
где  ,
,  ,
,  - параметры фильтра, вычисляемые в предыдущем кадре
- параметры фильтра, вычисляемые в предыдущем кадре
4. Четвертый случай: ltpf_active=1 и mem_ltpf_active=1 и  и
и

5. Пятый случай: ltpf_active=1 и mem_ltpf_active=1 и (  )
)

В данном документе рассматриваются преимущества изобретения. Приведенные выше примеры менее сложны, чем ранее использованные реализации. Например, в иллюстративном случае LTP-постфильтра преимущество сложности по сравнению с LPC-способом, используемым в [13], понятно. По сравнению со способами плавного микширования, используемыми в [9], [10], [11] и [12], имеется на одну операцию меньше на выборку. Чтобы увидеть это, обратите внимание, что  могут быть реализованы путем вычитания постоянной
могут быть реализованы путем вычитания постоянной  из
из  и суммирования постоянной
и суммирования постоянной  с
с  по выборкам. Вместе с фильтрацией с использованием
по выборкам. Вместе с фильтрацией с использованием  это число операций эквивалентно фильтрации с помощью
это число операций эквивалентно фильтрации с помощью  , за которой следует взвешивание фильтрованных сигналов, используемое в способе плавного микширования. Способ плавного микширования при этом продолжается суммированием взвешенных сигналов, в то время как в предлагаемом способе выход уже получен.
, за которой следует взвешивание фильтрованных сигналов, используемое в способе плавного микширования. Способ плавного микширования при этом продолжается суммированием взвешенных сигналов, в то время как в предлагаемом способе выход уже получен.
Когда установлено, что первая и/или вторая фильтрация не будет выполняться (или будет выдавать в качестве выхода то же значение, что и на входе, в основном действуя как «тождественный фильтр», который, как правило, бесполезен), можно шунтировать бесполезный блок и/или секцию фильтрации (например, как на фиг. 1a). В связи с этим, число вычислений уменьшается.
Как правило, прерывания исключаются, когда фильтр переходит на границе кадра с 

на :

путем фильтрации начальной части длиной кадра с помощью изменяющегося во времени фильтра :

за которой следует фильтрация промежуточного выхода изменяющегося во времени фильтра с помощью изменяющегося во времени фильтра :


- изменяющийся во времени фильтр, который переходит от полной фильтрации с помощью к отсутствию фильтрации. - изменяющийся во времени фильтр, который переходит от отсутствия фильтрации к полной фильтрации с помощью .
Первый пример (основанный на примере, приведенном выше на фиг. 5b) приведен далее в псевдокоде:
Если gk-1==gk и gk ==0, то фильтрация отсутствует.
В иных случаях, если gk-1==0 и gk!=0, то
{
- первая фильтрация отсутствует
- имеется вторая фильтрация в Tl
- имеется третья фильтрация в следующем подынтервале (где Tl != T)
}
В иных случаях, если gk-1!=0 и gk ==0, то
{
- имеется первая фильтрация в Tl
- вторая фильтрация отсутствует
- отсутствует третья фильтрация в следующем подынтервале
}
В иных случаях, если gk-1!=0 и gk!=0, то изучается разность целочисленной и дробной частей задержки шага
{
Если целочисленная и дробная части задержки шага в k-1 и k одинаковы (pitch_int(k-1)== pitch_int(k) && pitch_fr(k-1)== pitch_fr(k)), то
{
- нет ни первой фильтрации, ни второй фильтрации
- имеется третья фильтрация в Tl и в Ts (т.е., по всему T)
}
в иных случаях, если имеется разность в целочисленной или в дробной части задержки шага
{
- имеется первая фильтрация в Tl
- имеется вторая фильтрация в Tl
- имеется третья фильтрация в следующем подынтервале (где если Tl != T)
}
}
Далее приведен второй пример в псевдокоде:
2.
Если gk-1== gk и gk ==0, то фильтрация отсутствует.
В иных случаях, если g k-1 ==0 и gk!=0, то
{
- первая фильтрация отсутствует
- имеется вторая фильтрация в Tl
- имеется третья фильтрация в следующем подынтервале (где Tl != T)
}
В иных случаях, если gk -1!=0 и gk ==0, то
{
- имеется первая фильтрация в Tl
- отсутствует вторая фильтрация
- отсутствует третья фильтрация
}
В иных случаях, если gk-1!=0 и gk!=0, то смотрим на разность целочисленной части шага
{
Если абсолютная разность между целочисленной частью шага в k-1 и k ниже порога, то
{
- имеется четвертая фильтрация в Tl
- имеется третья фильтрация в T (где Tl != T)
}
в иных случаях, если абсолютная разность между целочисленной частью шага в k-1 и k выше порога, то
{
- имеется первая фильтрация в Tl
- имеется вторая фильтрация в Tl
- имеется третья фильтрация в следующем подынтервале (разумеется, только если Tl != T)
}
}
В этой реализации «2.» мы можем также включить дробную часть шага в дополнение к проверке разности между целочисленной частью шага.
Фиг. 12a иллюстрирует систему 110, которая может реализовывать, например, прибор 80 кодирования. Система 110 может содержать процессор 111 и долговременное запоминающее устройство 112, хранящее инструкции, которые при исполнении процессором 111 могут инициировать осуществление процессором 111 оценки 113 параметров (например, как в блоке 89), обработки 114 сигнала кодирования (например, для реализации элементов 82-86), и формирования 115 битового потока (например, для реализации устройства 89’ записи битового потока). Система 110 может содержать блок 116 ввода, который может получать аудиосигнал (например, аудиосигнал 89). Процессор 111 может вследствие этого осуществлять процессы для получения кодированного представления (например, в формате 11a) аудиосигнала. Это кодированное представление может выдаваться во внешние блоки с помощью блока 117 вывода. Блок 117 вывода может содержать, например, блок связи для связи с внешними устройствами (например, с использованием беспроводной связи, такой как Bluetooth) и/или внешних пространств памяти. Процессор 111 может сохранять кодированное представление аудиосигнала в пространстве 118 локальной памяти.
Фиг. 12b иллюстрирует систему 120, которая может реализовывать прибор 10, 30, 40, 50, 90 и/или осуществлять способ 60 или 70. Система 120 может содержать процессор 121 и долговременное запоминающее устройство 122, хранящее инструкции, которые при исполнении процессором 121 могут инициировать выполнение процессором 121 считывания 123 битового потока (например, для реализации устройства 91’ считывания битового потока), управления 124 первым/вторым фильтром (например, любым из элементов 12, 14, 22, 24, 51, 52 и/или операций 61, 62 фильтра и/или этапов способа 70), и/или управления 125 третьим фильтром (например, для реализации третьего фильтра 31, 53 и/или операций 63 фильтра и/или этапов способа 70). Система 120 может содержать блок 126 ввода, который может получать декодированное представление аудиосигнала (например, в виде 11a). Процессор 121 может вследствие этого осуществлять процессы для фильтрации сигнала (например, с использованием LTP-фильтра). Это фильтрованное представление может выдаваться во внешние блоки с использованием блока 127 вывода. Блок 127 вывода может содержать, например, блок связи для связи с внешними устройствами (например, с использованием беспроводной связи, такой как Bluetooth) и/или внешних пространств памяти. Процессор 121 может сохранять фильтрованное представление аудиосигнала в пространстве 128 локальной памяти.
В примерах системы 110 и 120 могут представлять собой одно и то же устройство.
Исходя из определенных требований к реализации, примеры могут быть реализованы в аппаратных средствах. Реализация может осуществляться с использованием носителя цифровых данных, например гибкого диска, Универсального Цифрового Диска (DVD), диска Blu-Ray, Компакт-Диска (CD), Постоянного Запоминающего Устройства (ROM), Программируемого Постоянного Запоминающего Устройства (PROM), Стираемого и Программируемого Постоянного Запоминающего Устройства (EPROM), Электрически Стираемого Программируемого Постоянного Запоминающего Устройства (EEPROM) или флэш-памяти, на котором хранятся электронно-считываемые управляющие сигналы, которые взаимодействуют (или выполнены с возможностью взаимодействия) с программируемой вычислительной системой таким образом, что осуществляется соответствующий способ. Следовательно, носитель цифровых данных может быть машиночитаемым.
В большинстве случаев примеры могут быть реализованы в виде компьютерного программного продукта с программными инструкциями, при этом программные инструкции действуют для осуществления одного из способов, когда компьютерный программный продукт запущен на компьютере. Программные инструкции могут, например, храниться на машиночитаемом носителе.
Другие примеры включают в себя компьютерную программу для осуществления одного из описываемых в данном документе способов, хранящуюся на машиночитаемом носителе. Иными словами, примером способа вследствие этого является компьютерная программа, содержащая программные инструкции для осуществления одного из описываемых в данном документе способов, когда компьютерная программа запущена на компьютере.
Дополнительным примером способов вследствие этого является информационный носитель (либо носитель цифровых данных, либо машиночитаемый носитель) содержащий записанную на нем компьютерную программу для осуществления одного из описываемых в данном документе способов. Информационный носитель, носитель цифровых данных или носитель с записанными данными являются материальными и/или долговременными, а не сигналами, который являются нематериальными и недолговременными.
Еще один пример включает в себя блок обработки, например, компьютер или программируемое логическое устройство, осуществляющие один из описываемых в данном документе способов.
Еще один пример включает в себя компьютер, на котором установлена компьютерная программа для осуществления одного из описываемых в данном документе способов.
Еще один пример включает в себя прибор или систему, которая передает (например, электронно или оптически) компьютерную программу для осуществления одного из описываемых в данном документе способов в приемник. Приемник может, например, представлять собой компьютер, мобильное устройство, запоминающее устройство и т.п. Прибор или система может, например, содержать файловый сервер для передачи компьютерной программы в приемник.
В некоторых примерах программируемое логическое устройство (например, программируемая логическая интегральная схема) может использоваться для выполнения некоторых или всех функциональных возможностей, описываемых в данном документе. В некоторых примерах программируемая логическая интегральная схема может взаимодействовать с микропроцессором с целью осуществления одного из описываемых в данном документе способов. В большинстве случаев способы могут осуществляться любым подходящим аппаратным прибором.
Вышеописанные примеры являются иллюстративными для рассмотренных выше принципов. При этом подразумевается, что очевидны изменения конструкций и элементов, описываемых в данном документе. Поэтому цель состоит в ограничении объемом нижеследующей формулы изобретения, а не конкретными элементами, представленными для описания и объяснения примеров в данном документе.
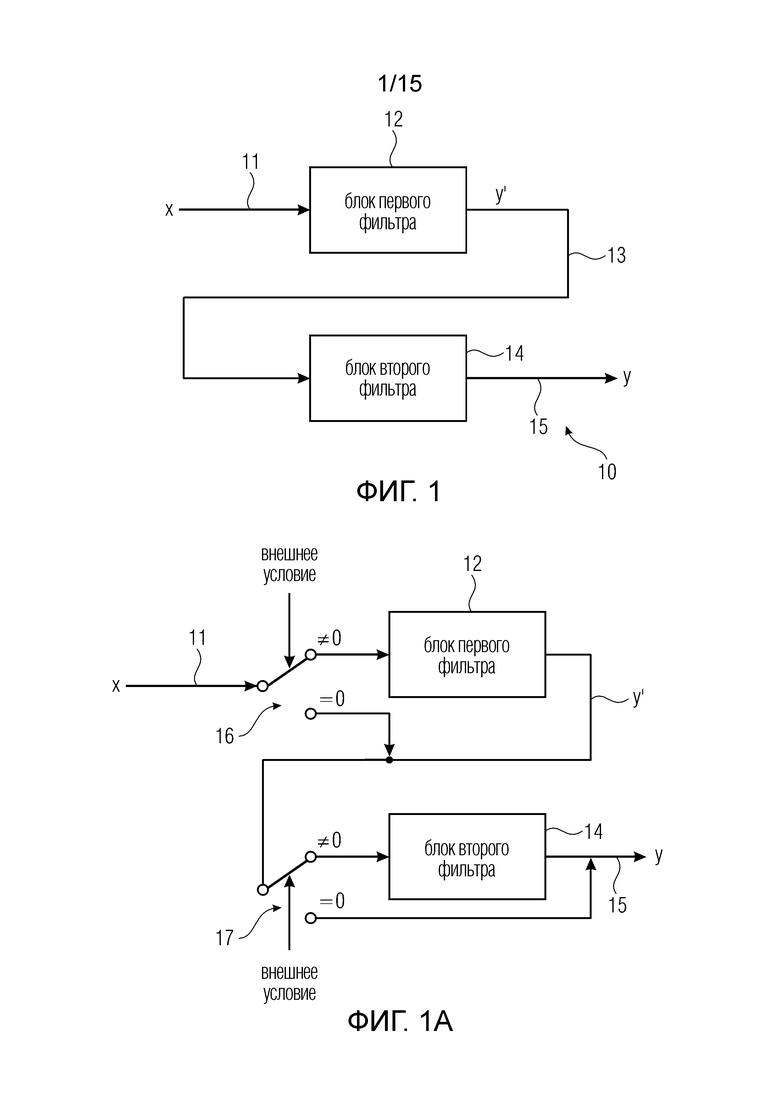
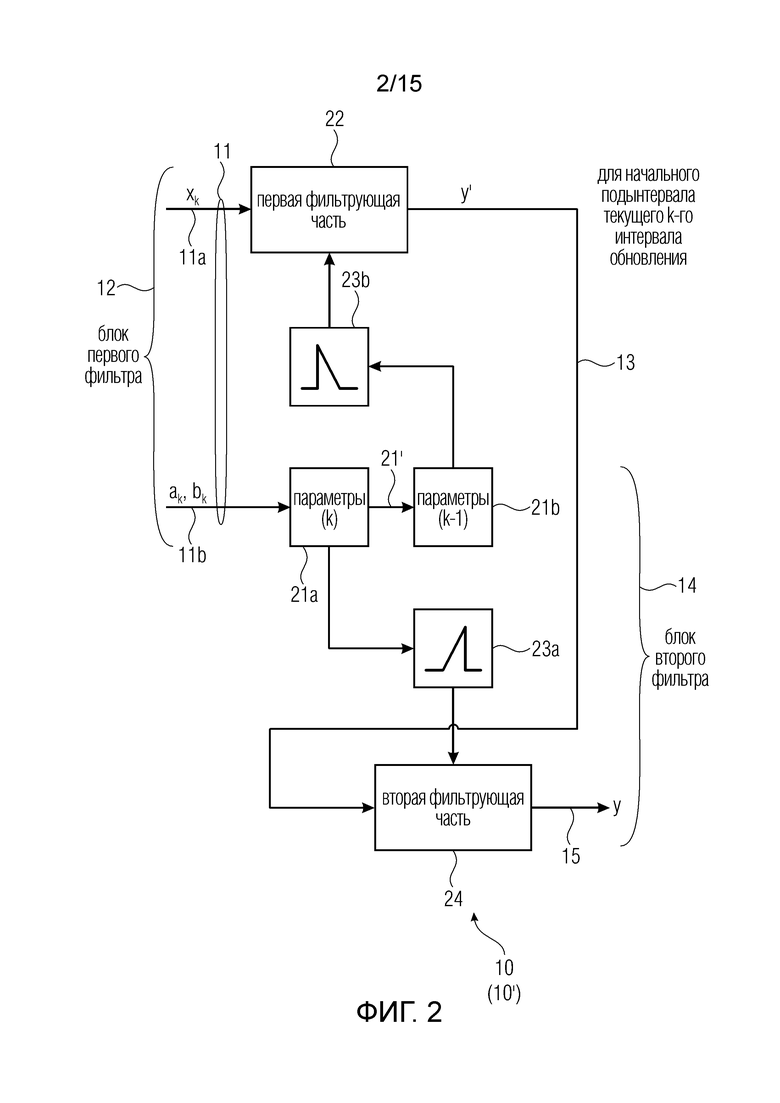
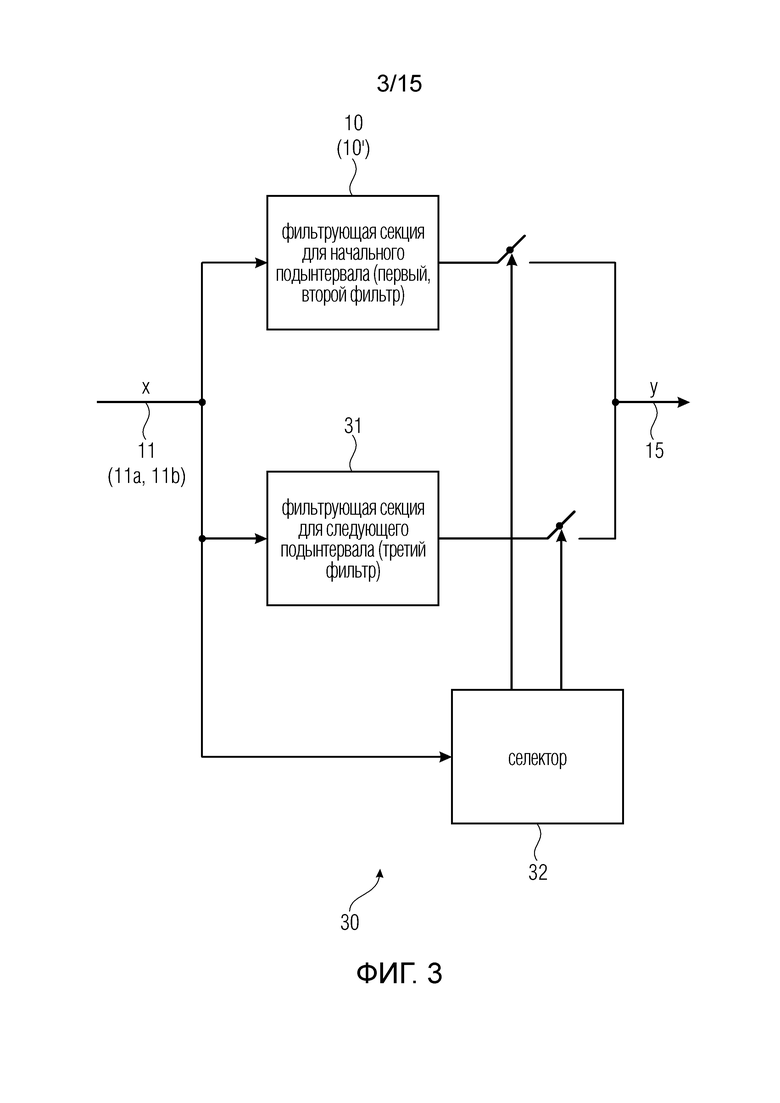
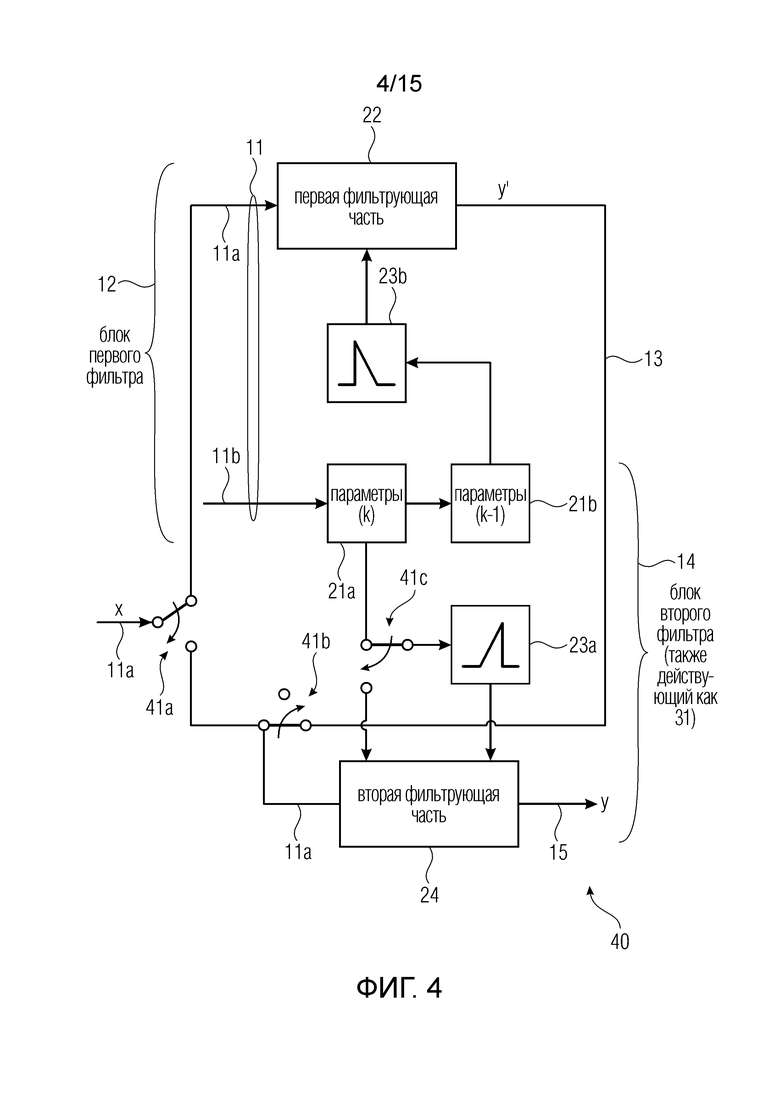
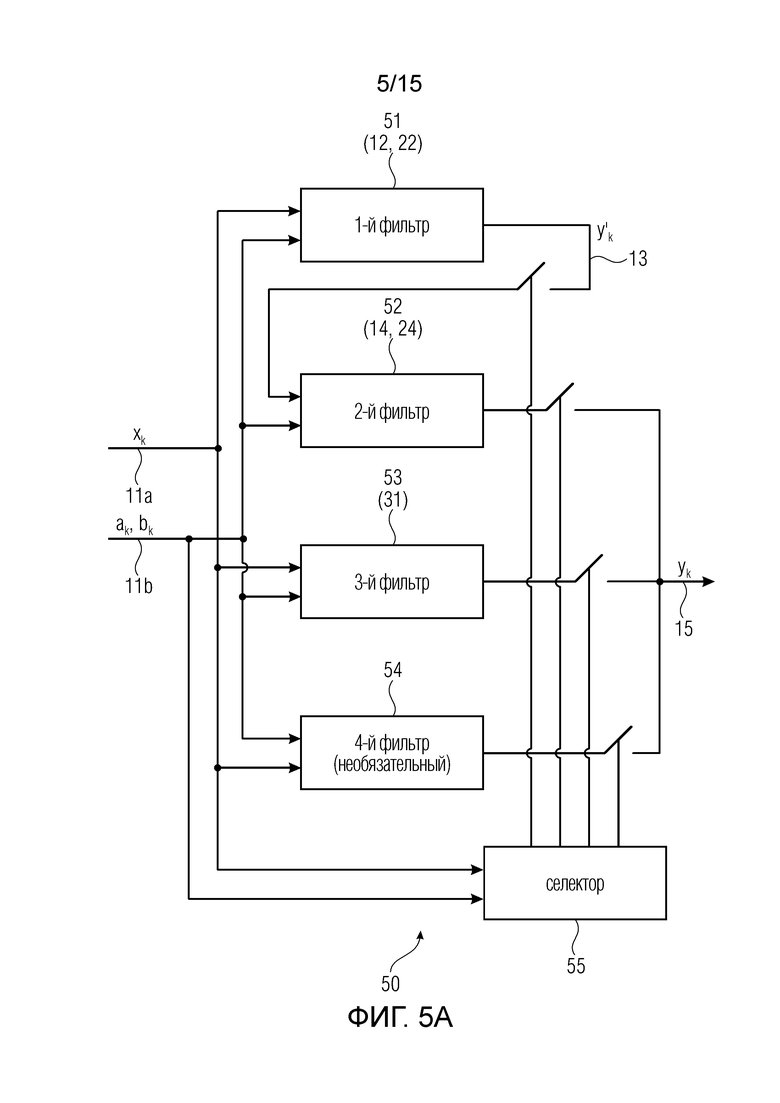
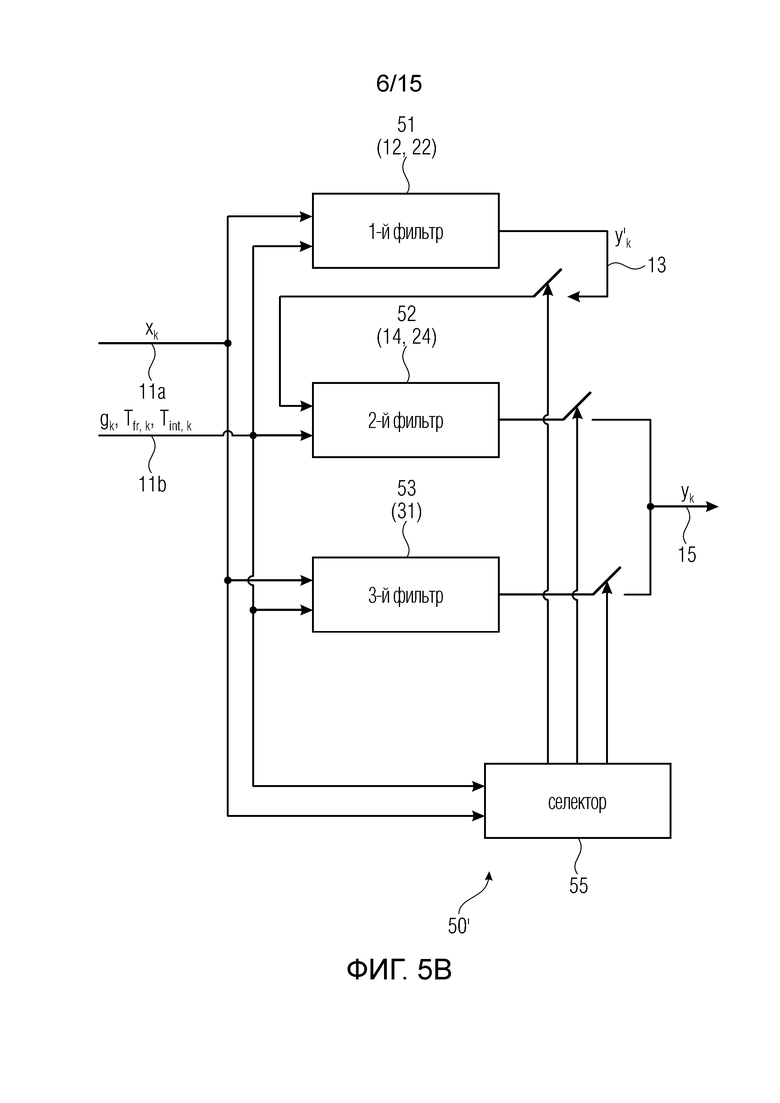
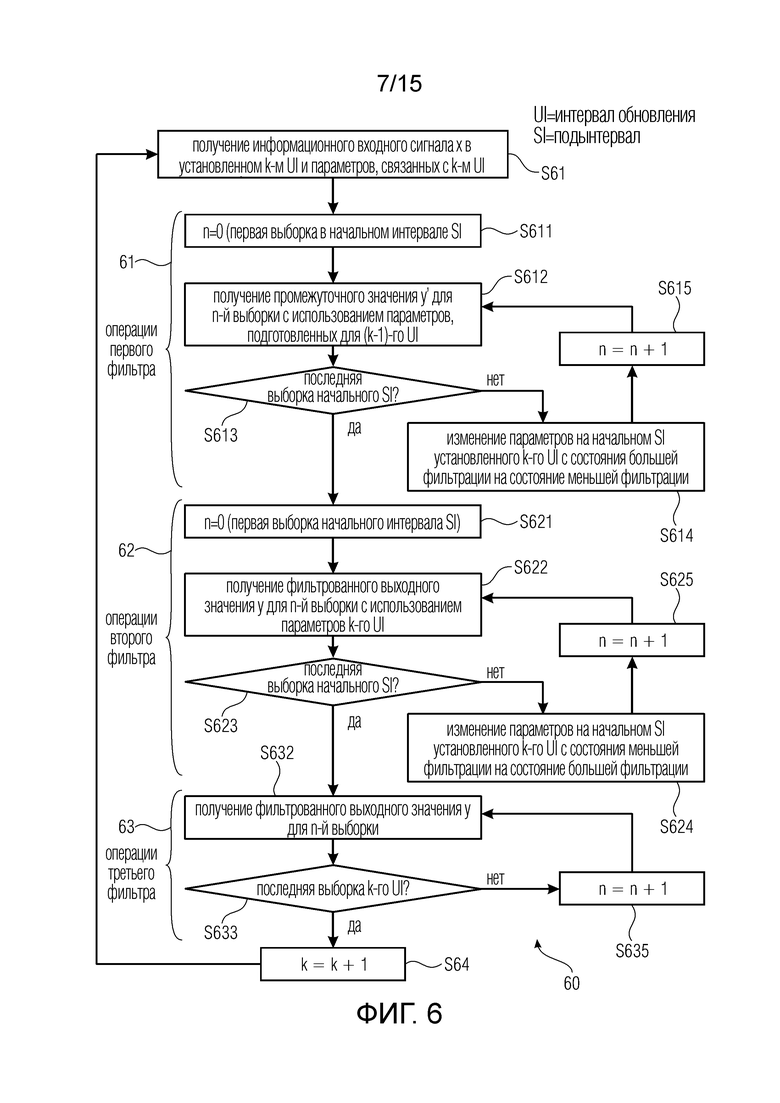
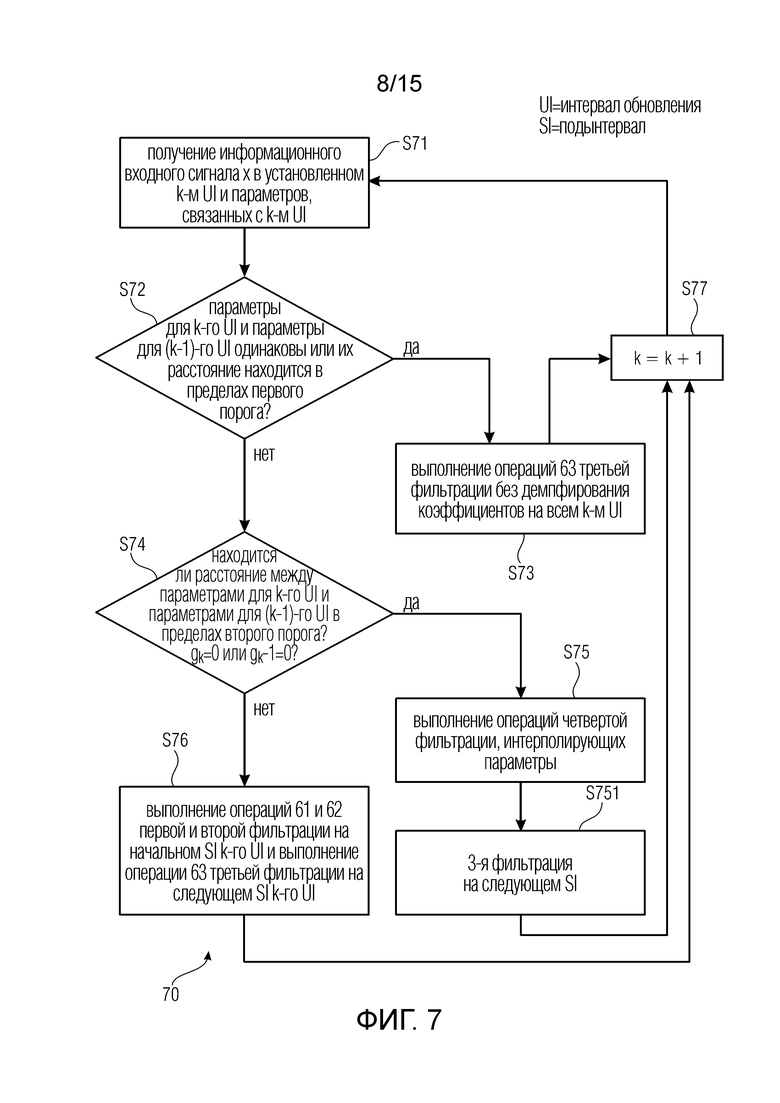
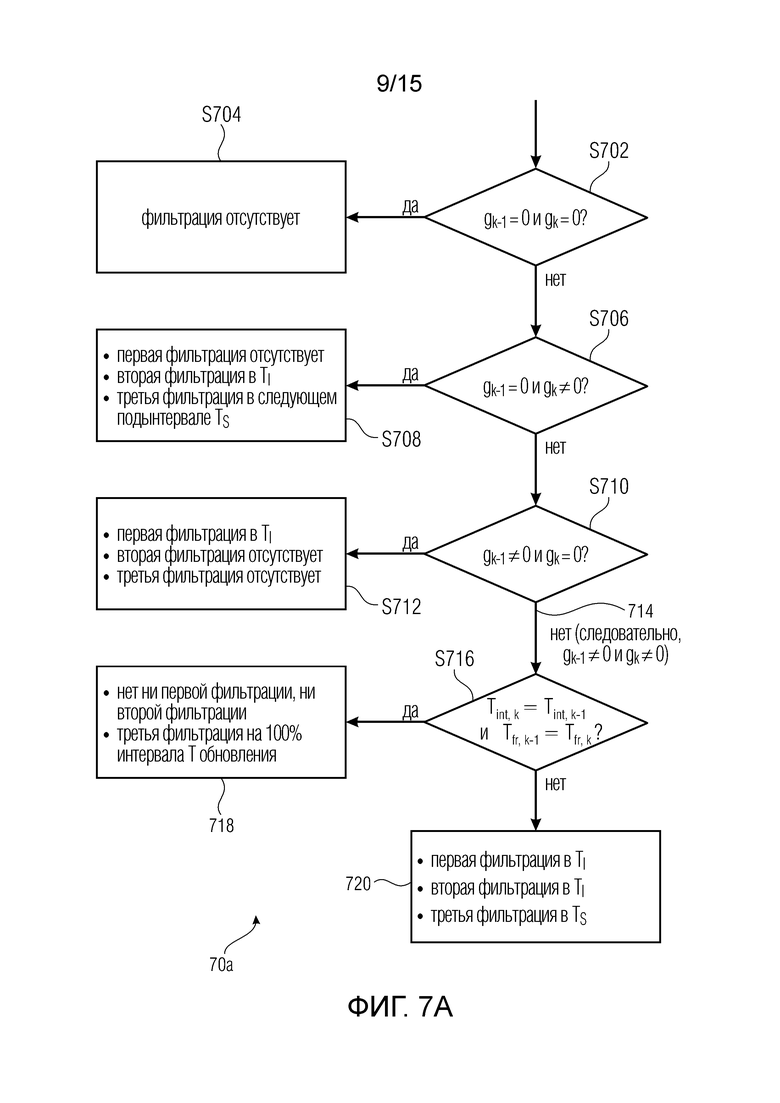
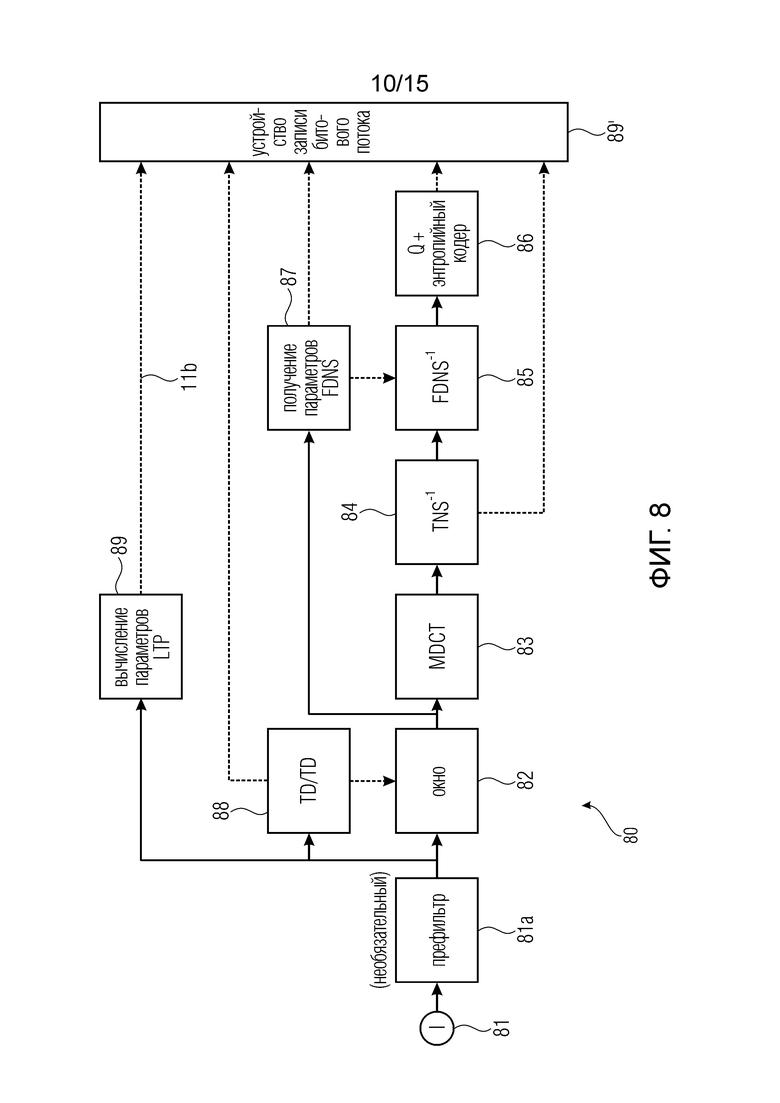
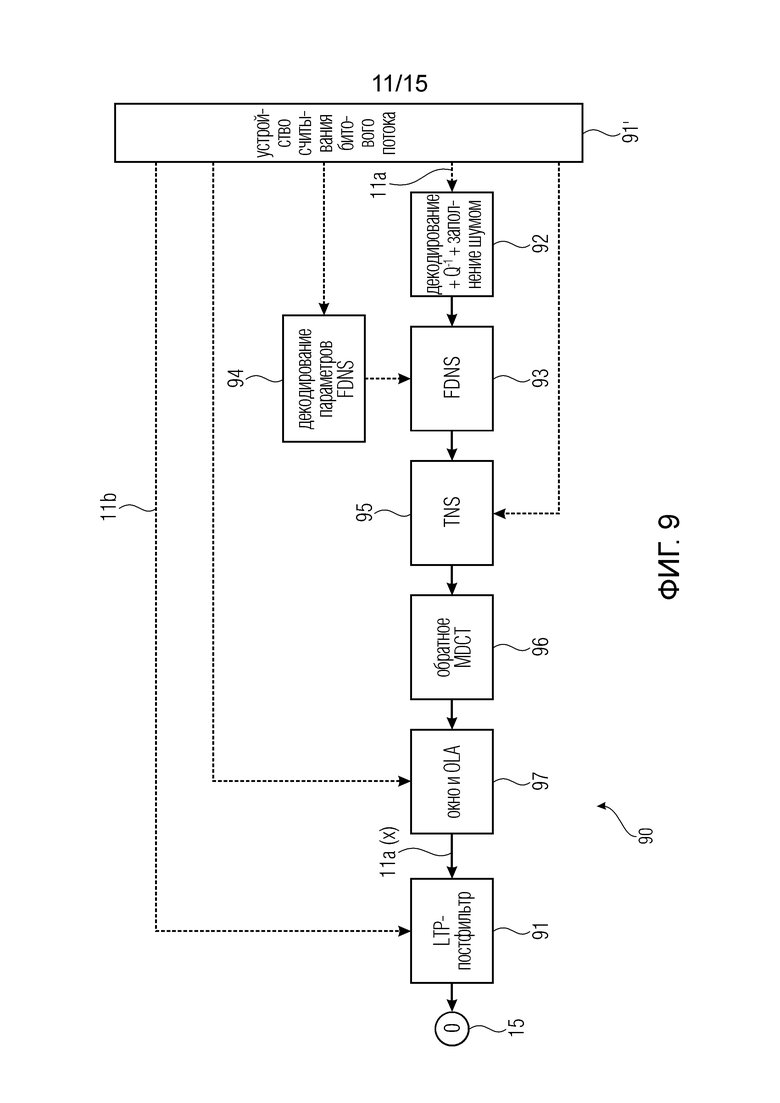
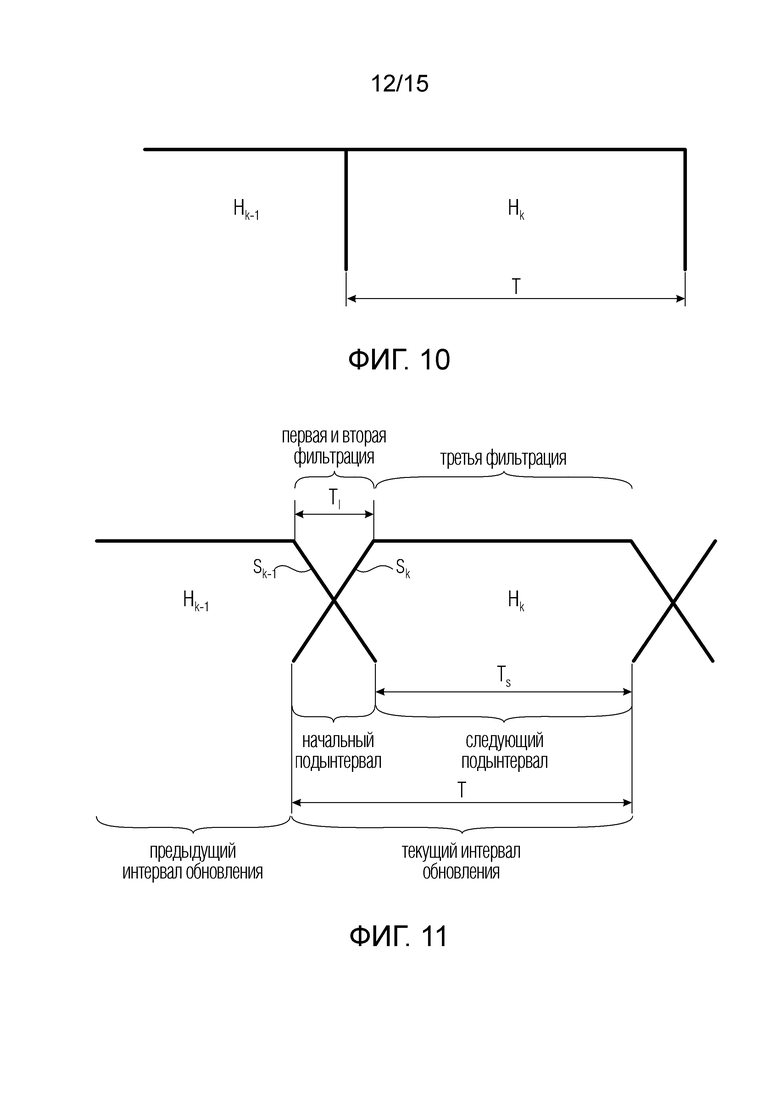
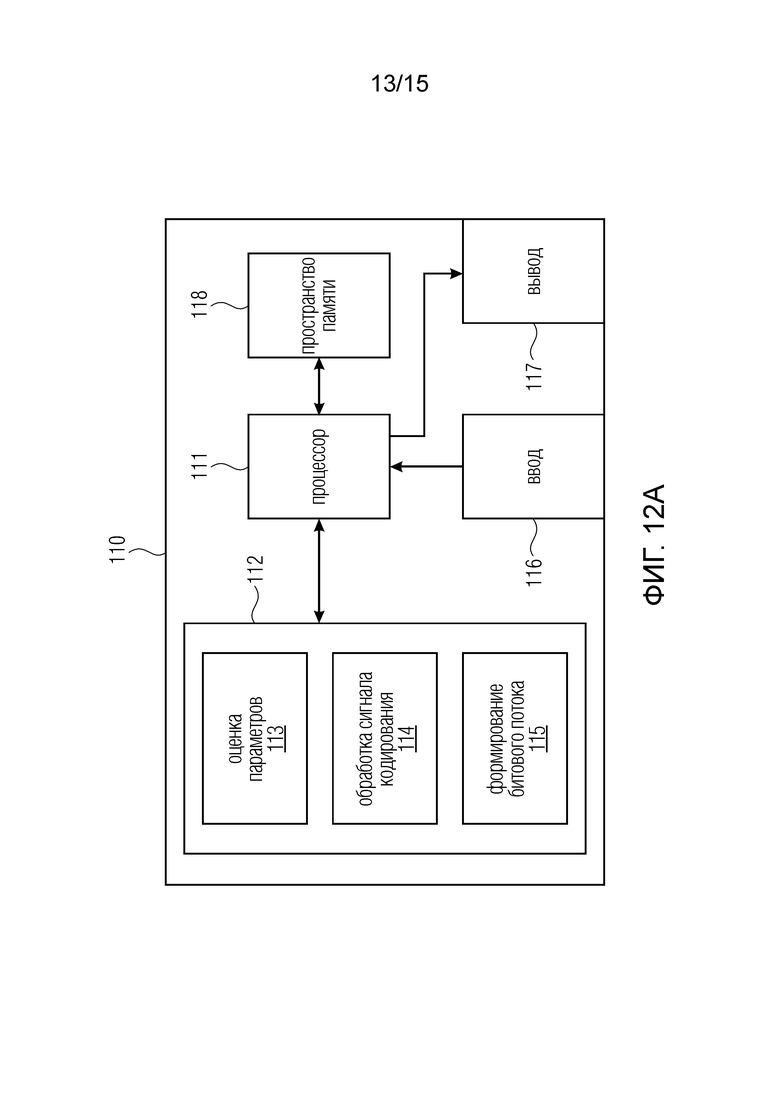
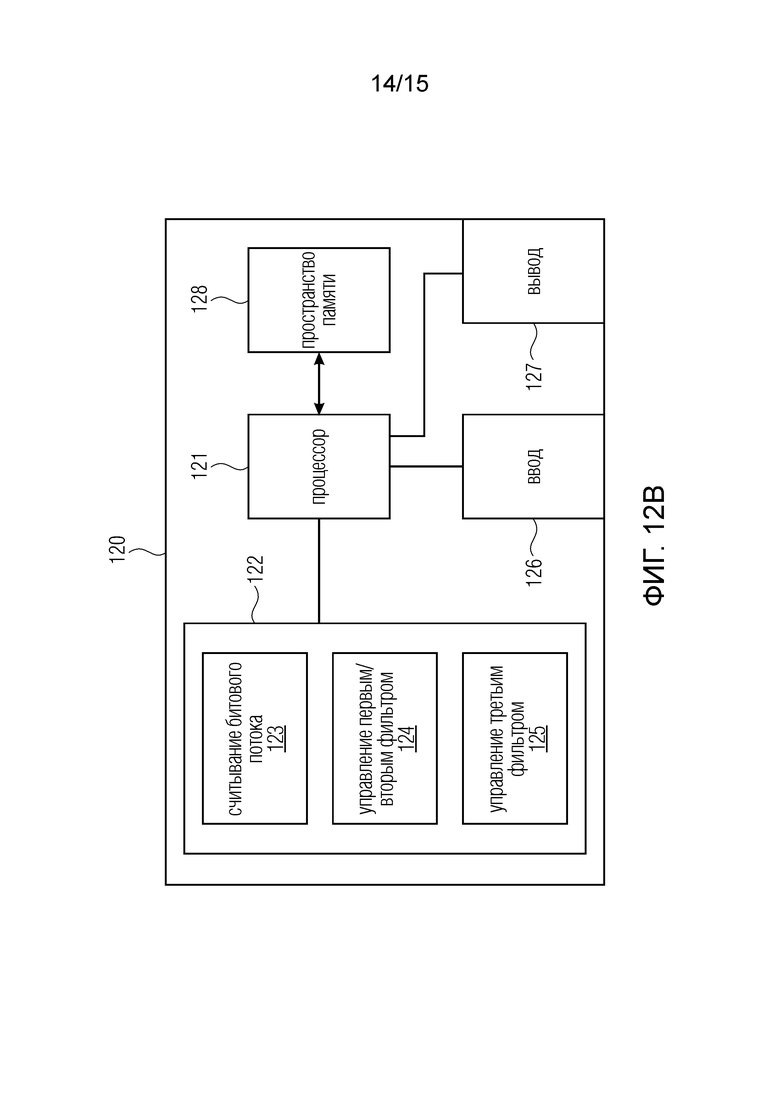
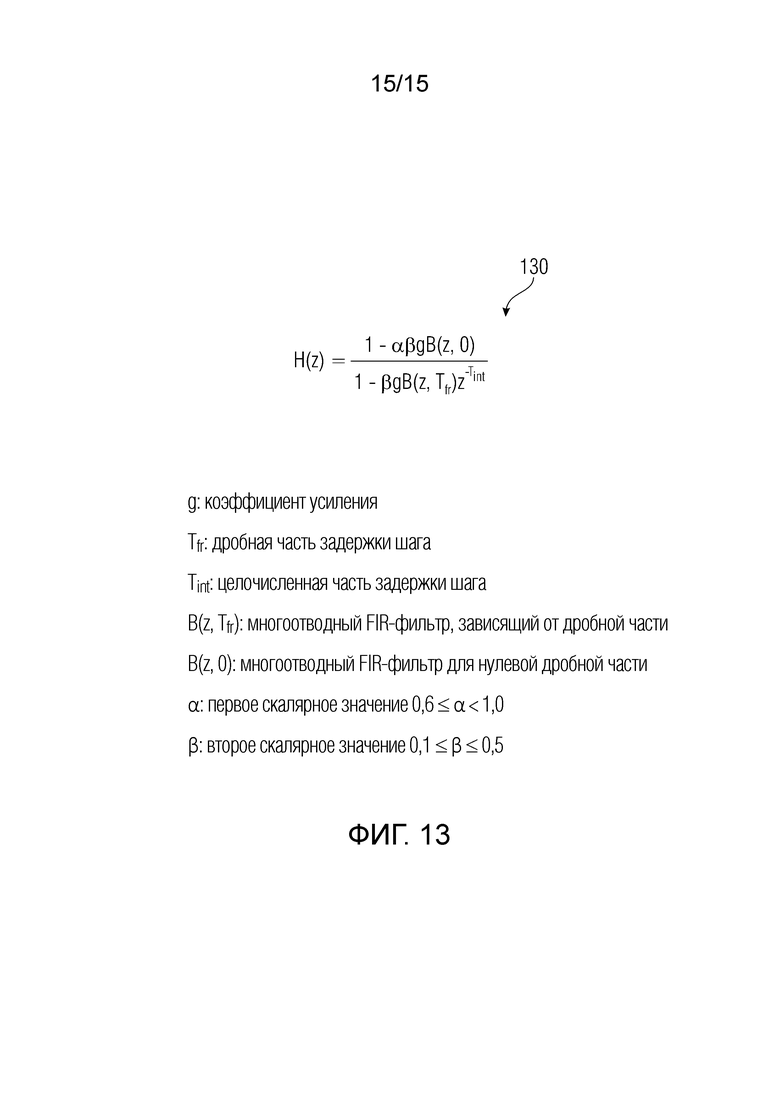
Рассматриваются способы и системы для фильтрации информационного входного сигнала. Система может содержать: блок (12) первого фильтра, фильтрующий входной сигнал в начальном подынтервале ( ) в текущем интервале (
) в текущем интервале ( ) обновления в соответствии с параметрами, связанными с предыдущим интервалом обновления, причем параметры масштабируются на первый коэффициент (sk-1) масштабирования, изменяющийся по направлению к 0; блок (14) второго фильтра, фильтрующий входной сигнал (13) второго фильтра на основе выхода блока первого фильтра на начальном интервале () в соответствии с параметрами, связанными с текущим интервалом () обновления, причем параметры масштабируются на второй коэффициент (sk) масштабирования, изменяющийся от 0 или значения, близкого к 0, по направлению к значению, более далекому от 0. 3 н. и 29 з.п. ф-лы, 13 ил., 1 табл.
) обновления в соответствии с параметрами, связанными с предыдущим интервалом обновления, причем параметры масштабируются на первый коэффициент (sk-1) масштабирования, изменяющийся по направлению к 0; блок (14) второго фильтра, фильтрующий входной сигнал (13) второго фильтра на основе выхода блока первого фильтра на начальном интервале () в соответствии с параметрами, связанными с текущим интервалом () обновления, причем параметры масштабируются на второй коэффициент (sk) масштабирования, изменяющийся от 0 или значения, близкого к 0, по направлению к значению, более далекому от 0. 3 н. и 29 з.п. ф-лы, 13 ил., 1 табл.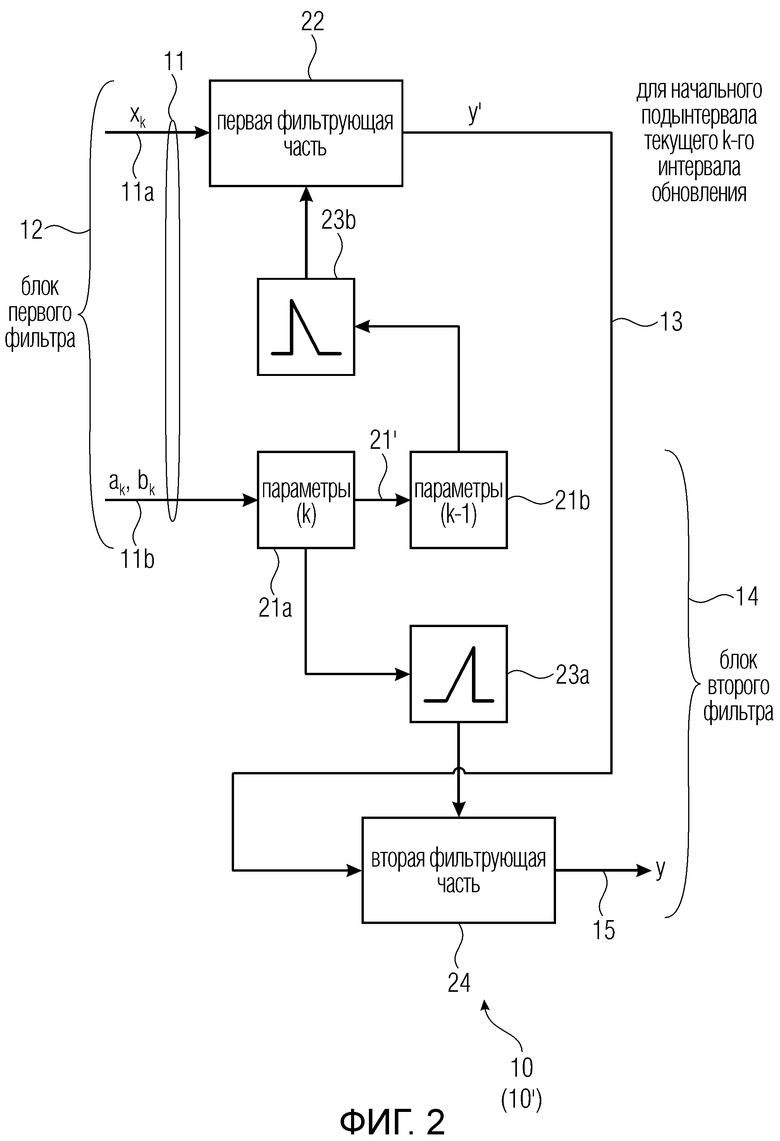
1. Система (10, 30, 40, 50, 80) для фильтрации информационного входного сигнала (11, 11a, x), разделенного на различные интервалы обновления, в соответствии с параметрами, изменяющимися с интервалами обновления, для получения фильтрованного выходного сигнала (y, 15), причем система (10) содержит:
блок (12) первого фильтра для фильтрации входного сигнала (11, x) первого фильтра по меньшей мере на начальном подынтервале ( ) в текущем интервале (
) в текущем интервале ( ) обновления для получения выходного сигнала (y’, 13) первого фильтра в соответствии с параметрами, связанными с предыдущим интервалом обновления, причем блок (12) первого фильтра выполнен с возможностью масштабирования параметров по меньшей мере на начальном подынтервале (), причем блок (12, 51) первого фильтра выполнен с возможностью масштабирования параметров (21b), связанных с предыдущим интервалом обновления, на первый коэффициент (sk-1) масштабирования, изменяющийся по направлению к 0 или значению, близкому к 0, по меньшей мере на начальном подынтервале (); и
) обновления для получения выходного сигнала (y’, 13) первого фильтра в соответствии с параметрами, связанными с предыдущим интервалом обновления, причем блок (12) первого фильтра выполнен с возможностью масштабирования параметров по меньшей мере на начальном подынтервале (), причем блок (12, 51) первого фильтра выполнен с возможностью масштабирования параметров (21b), связанных с предыдущим интервалом обновления, на первый коэффициент (sk-1) масштабирования, изменяющийся по направлению к 0 или значению, близкому к 0, по меньшей мере на начальном подынтервале (); и
блок (14) второго фильтра для фильтрации входного сигнала (13) второго фильтра на начальном подынтервале () в соответствии с параметрами, связанными с текущим интервалом () обновления для получения выходного сигнала (15) второго фильтра, причем блок (14) второго фильтра выполнен с возможностью масштабирования параметров по меньшей мере на начальном подынтервале (), причем блок (14, 52) второго фильтра выполнен с возможностью масштабирования параметров (21a), связанных с текущим интервалом () обновления, на второй коэффициент (sk) масштабирования, изменяющийся от 0 или значения, близкого к 0, по направлению к значению, отличающемуся от 0, или значению, более далекому от 0, чем значение, близкое к 0, по меньшей мере на начальном подынтервале (),
в которой входной сигнал (11, 11а) первого фильтра основывается на информационном входном сигнале (x), выходной сигнал (13) первого фильтра является промежуточным сигналом (y’), входной сигнал второго фильтра основывается на промежуточном сигнале (y’), а фильтрованный выходной сигнал (y) основывается на выходном сигнале (15) второго фильтра.
2. Система по п. 1, дополнительно содержащая:
блок (31, 53) третьего фильтра для фильтрации информационного входного сигнала (x, 11) в следующем подынтервале ( ) в текущем интервале () обновления после начального подынтервала () в соответствии с параметрами, связанными с текущим интервалом () обновления.
) в текущем интервале () обновления после начального подынтервала () в соответствии с параметрами, связанными с текущим интервалом () обновления.
3. Система по п. 2, дополнительно содержащая:
селектор (32, 55), выполненный с возможностью проверки того, является ли расстояние между параметрами для текущего интервала () обновления 0 или находится в пределах первого порога, чтобы фильтровать информационный входной сигнал (11, 11а, x) по меньшей мере в начальном подынтервале () с использованием блока (53) третьего фильтра.
4. Система по п. 2, в которой блок (31, 53) третьего фильтра выполнен на следующем интервале () с возможностью сохранения постоянных параметров фильтра.
5. Система по п. 2, в которой блок (31, 53) третьего фильтра действует как долговременный префильтр с предсказанием (LTP-префильтр), LTP-постфильтр, LTP-префильтр гармоник или LTP-постфильтр гармоник.
6. Система по п. 2, дополнительно выполненная с возможностью проверки коэффициента gk усиления текущего k-го интервала обновления и коэффициента gk-1 усиления предыдущего (k-1)-го интервала обновления таким образом, что:
- если gk-1=0 и gk=0, то фильтрация блоков первого, второго и третьего фильтров деактивирована; и/или
- если gk-1=0 и gk≠0, то
- фильтрация в блоке первого фильтра деактивирована;
- имеется фильтрация в блоке второго фильтра по меньшей мере на начальном подынтервале ();
- имеется фильтрация в блоке третьего фильтра в следующем подынтервале (); и/или
- если gk-1≠0 и gk=0, то
- имеется фильтрация в блоке первого фильтра по меньшей мере на начальном подынтервале ();
- фильтрация в блоке второго фильтра деактивирована;
- фильтрация в блоке третьего фильтра деактивирована; и/или
- если gk-1≠0 и gk≠0, то проверяется разность между целочисленной и дробной частями задержки шага таким образом, что:
- если целочисленная и дробная части задержки шага в текущем k-м интервале обновления и в предыдущем (k-1)-м интервале обновления одинаковы, то:
- фильтрация в блоках первого и второго фильтров деактивирована;
- имеется фильтрация в блоке третьего фильтра на всем текущем интервале обновления;
- в иных случаях, если имеется разность в целочисленной или в дробной части задержки шага:
- имеется фильтрация в блоке первого фильтра по меньшей мере на начальном подынтервале ();
- имеется фильтрация в блоке (52) второго фильтра по меньшей мере на начальном подынтервале ();
- имеется фильтрация в блоке (53) третьего фильтра в следующем подынтервале ().
7. Система по п. 1, в которой по меньшей мере один из блоков (12, 14, 22, 24, 51, 52) первого и второго фильтров действует как долговременный префильтр с предсказанием (LTP-префильтр), LTP-постфильтр, LTP-префильтр гармоник или LTP-постфильтр гармоник.
8. Система по п. 1, в которой по меньшей мере один из блоков (12, 14, 22, 24, 51, 52) первого и второго фильтров имеет передаточную функцию (130), содержащую числитель и знаменатель, в которой числитель содержит значение коэффициента усиления, указанное в информация о коэффициенте усиления, и в которой знаменатель содержит целочисленную часть задержки шага, указанной в информации о задержке шага, и многоотводного фильтра, зависящего от дробной части задержки шага.
9. Система по п. 1, в которой:
параметры по меньшей мере одного из блоков (12, 14, 22, 24, 51, 52) первого и второго фильтров могут быть получены по информации о гармоничности, информации о коэффициенте усиления, информации о задержке шага, целочисленной части задержки шага информационного входного сигнала (x, 11) и/или дробной части задержки шага информационного входного сигнала (x, 11).
10. Система по п. 1, в которой:
параметры блоков первого и/или второго фильтров выбираются по меньшей мере из одного или комбинации из фильтра с кодированием с линейным предсказанием (LPC), фильтра с бесконечной импульсной характеристикой (IIR) и/или фильтра с конечной импульсной характеристикой (FIR).
11. Система по п. 1, в которой:
первый коэффициент (sk-1) масштабирования и второй коэффициент (sk) масштабирования являются неотрицательными значениями, дополняющими друг друга до значения, большего 0.
12. Система по п. 1, в которой:
первый коэффициент (sk-1) масштабирования изменяется по направлению к 0 по направлению к конечному пределу по меньшей мере начального подынтервала (), и/или
второй коэффициент (sk) масштабирования изменяется от 0 или значения, близкого к 0, от начального предела текущего интервала обновления () по направлению к ненулевому значению или значению, которое дальше от 0, чем значение, близкое к 0.
13. Система по п. 1, дополнительно содержащая:
блок (54) четвертого фильтра, выполненный с возможностью фильтрации информационного входного сигнала (x, 11) по меньшей мере на начальном подынтервале () с использованием параметров, получаемых путем интерполяции параметров, связанных с текущим интервалом () обновления, и параметров, связанных с предыдущим интервалом обновления.
14. Система по п. 13, в которой блок четвертого фильтра действует как долговременный префильтр с предсказанием (LTP-префильтр), LTP-постфильтр, LTP-префильтр гармоник или LTP-постфильтр гармоник.
15. Система по п. 13, дополнительно содержащая:
селектор (55), выполненный с возможностью проверки (S74) того, находится ли расстояние между параметрами для текущего интервала () обновления в пределах второго порога, чтобы фильтровать (S75) информационный входной сигнал (x, 11) по меньшей мере в начальном подынтервале () с использованием блока (54) четвертого фильтра.
16. Система по п. 15, дополнительно выполненная с возможностью активного установления второго порога на основе значений, связанных с сигналом.
17. Система по п. 16, дополнительно выполненная с возможностью:
установления второго порога в виде порога расстояния задержки шага, равного минимуму между целочисленной частью задержки шага на текущем интервале () обновления и целочисленной частью задержки шага на предыдущем интервале обновления,
чтобы использовать блок (54) четвертого фильтра, когда расстояние между целочисленной частью задержки шага на текущем интервале обновления и целочисленной частью задержки шага на предыдущем интервале обновления меньше, чем порог расстояния задержки шага; и/или
чтобы использовать блоки (12, 14, 51, 52) первого и второго фильтров, когда расстояние между целочисленной частью задержки шага на текущем интервале обновления и целочисленной частью задержки шага на предыдущем интервале обновления больше, чем порог расстояния задержки шага.
18. Система по п. 16, дополнительно выполненная с возможностью:
использования условия, связанного с коэффициентами усиления сигнала на текущем интервале обновления и на предыдущем интервале,
чтобы использовать блок (54) четвертого фильтра, когда коэффициенты усиления сигнала и на текущем интервале обновления, и на предыдущем интервале отличаются от нуля, и/или
чтобы использовать блоки (12, 14, 51, 52) первого и второго фильтров, когда по меньшей мере один из коэффициентов усиления сигнала на текущем интервале обновления и на предыдущем интервале равен нулю.
19. Система по п. 1, в которой информационный входной сигнал (x, 11) является аудиосигналом.
20. Система по п. 1, в которой блок (12) первого фильтра должен выдавать выходной сигнал (13) первого фильтра в виде

где коэффициент  масштабирования изменяется по направлению к значению, близкому к 0 при увеличении n,
масштабирования изменяется по направлению к значению, близкому к 0 при увеличении n,
а блок (14) второго фильтра должен выдавать выходной сигнал второго фильтра в виде:

где коэффициент  масштабирования изменяется от значения, близкого к 0, по направлению к ненулевому значению при увеличении n, где - текущий k-й интервал обновления, - начальный подынтервал, n - момент времени, x[n] - информационный входной сигнал (11, 11а),
масштабирования изменяется от значения, близкого к 0, по направлению к ненулевому значению при увеличении n, где - текущий k-й интервал обновления, - начальный подынтервал, n - момент времени, x[n] - информационный входной сигнал (11, 11а),  - параметры, связанные с предыдущим (k-1)-м интервалом обновления,
- параметры, связанные с предыдущим (k-1)-м интервалом обновления,  - параметры, связанные с текущим k-м интервалом обновления, а P и Q связаны с типом фильтра.
- параметры, связанные с текущим k-м интервалом обновления, а P и Q связаны с типом фильтра.
21. Система по п. 1, в которой блок (12) первого фильтра выполнен с возможностью выдачи выходного сигнала (13) первого фильтра в виде
а блок (14) второго фильтра выполнен с возможностью выдачи фильтрованного выходного сигнала (13) в виде

при этом  - длина начального подынтервала,
- длина начального подынтервала,  - информационный входной сигнал (11, 11а),
- информационный входной сигнал (11, 11а),  - промежуточный сигнал,
- промежуточный сигнал,  - фильтрованный выходной сигнал (15), n - момент времени,
- фильтрованный выходной сигнал (15), n - момент времени, 
 , соответственно, основаны на целочисленной части и дробной части задержки шага, связанной с предыдущим интервалом обновления,
, соответственно, основаны на целочисленной части и дробной части задержки шага, связанной с предыдущим интервалом обновления,  , соответственно, основаны на целочисленной части и дробной части задержки шага, связанной с текущим интервалом обновления,
, соответственно, основаны на целочисленной части и дробной части задержки шага, связанной с текущим интервалом обновления,  - коэффициент, основанный на значении коэффициента усиления для текущего интервала обновления,
- коэффициент, основанный на значении коэффициента усиления для текущего интервала обновления,  - коэффициент, основанный на значении коэффициента усиления для установленного интервала обновления и на дробной части шага,
- коэффициент, основанный на значении коэффициента усиления для установленного интервала обновления и на дробной части шага,  - коэффициент, основанный на значении коэффициента усиления для предыдущего интервала обновления,
- коэффициент, основанный на значении коэффициента усиления для предыдущего интервала обновления,  - коэффициент, основанный на значении коэффициента усиления для предыдущего интервала обновления и на дробной части шага, Lden и Lnum постоянны и/или основаны на частоте дискретизации информационного входного сигнала (11, 11а).
- коэффициент, основанный на значении коэффициента усиления для предыдущего интервала обновления и на дробной части шага, Lden и Lnum постоянны и/или основаны на частоте дискретизации информационного входного сигнала (11, 11а).
22. Система по п. 1, в которой длительность начального подынтервала составляет между 5% и 40% от длительности текущего интервала обновления.
23. Система по п. 1, содержащая сторону (80) кодера и сторону (90) декодера, в которой по меньшей мере один из блоков первого и второго фильтров находится на стороне декодера.
24. Система по п. 1, содержащая сторону (80) кодера и сторону (90) декодера, в которой по меньшей мере один из блоков первого и второго фильтров находится на стороне кодера.
25. Система по п. 1, в которой сторона кодера содержит:
блок (89) оценки параметров, выполненный с возможностью оценки параметров по меньшей мере для одного из блоков (51-54) первого и второго фильтров.
26. Система по п. 1, дополнительно содержащая преобразователь (96) для преобразования первого представления информационного сигнала во второе представление информационного сигнала.
27. Система по п. 1, в которой по меньшей мере подынтервал является интервалом обновления.
28. Система по п. 1, дополнительно выполненная с возможностью:
установления того, будет ли блок (12, 14) первого и/или второго фильтра действовать как тождественный фильтр; и
в случае установления шунтировать блок (12, 14) первого и/или второго фильтра.
29. Система по п. 1, в которой блок (12) первого фильтра выполнен с возможностью масштабирования - постепенно и/или путем плавного изменения уровня и/или монотонно или строго монотонно - параметров по меньшей мере на начальном подынтервале.
30. Система по п. 1, в которой блок (14) второго фильтра выполнен с возможностью масштабирования - постепенно и/или путем плавного изменения уровня и/или монотонно или строго монотонно - параметров по меньшей мере на начальном подынтервале.
31. Способ (60, 70) фильтрации информационного входного сигнала (x, 11, 11a), разделенного на различные интервалы обновления, в соответствии с параметрами, связанными с интервалами обновления, для получения фильтрованного выходного сигнала (y), причем способ включает в себя:
выполнение первой фильтрации (61) по меньшей мере в начальном подынтервале () текущего интервала () обновления в соответствии с параметрами, связанными с предыдущими интервалами обновления, причем параметры по меньшей мере на начальном подынтервале () масштабируются на первый коэффициент (sk-1) масштабирования, изменяющийся по направлению к 0 или значению, близкому к 0, по меньшей мере на начальном подынтервале (); и
выполнение второй фильтрации (62) по меньшей мере на начальном подынтервале () в соответствии с параметрами, связанными с текущим интервалом () обновления, причем параметры на начальном подынтервале () масштабируются на второй коэффициент (sk) масштабирования, изменяющийся от 0 или значения, близкого к 0, по направлению к значению, отличающемуся от 0, или значению, более далекому от 0, чем значение, близкое к 0, по меньшей мере на начальном подынтервале (),
при этом первая фильтрация выполняется на информационном входном сигнале (x, 11, 11а), а вторая фильтрация выполняется на сигнале, получаемом с помощью первой фильтрации.
32. Долговременное запоминающее устройство (122), хранящее инструкции, которые при исполнении процессором (121) инициируют осуществление процессором (121) способа по п. 31.
| Токарный резец | 1924 |
|
SU2016A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| НИЗКОСКОРОСТНАЯ АУДИОКОДИРУЮЩАЯ/ДЕКОДИРУЮЩАЯ СХЕМА С ОБЩЕЙ ПРЕДВАРИТЕЛЬНОЙ ОБРАБОТКОЙ | 2009 |
|
RU2483365C2 |
| ПЕРЕКЛЮЧАЕМАЯ АУДИО КОДИРУЮЩАЯ/ДЕКОДИРУЮЩАЯ СХЕМА С МУЛЬТИРАЗРЕШЕНИЕМ | 2009 |
|
RU2520402C2 |

