Область техники.
Изобретение относится к области метеорологических измерений, конкретно к метеорологической системе измерения пространственной структуры атмосферной турбулентности (ПСАТ) в неоднородном ландшафте.
Уровень техники.
Известны метеорологические системы измерения пространственной структуры атмосферной турбулентности /SU 1840633, US 4573352, CN 107966745A, CN 106772694A, CN 105242329A, RU 84589, RU 85001, RU 98594, RU 117188, RU 173822, RU 2602730; Andreas E.A., Rachel E.G., Makshtas A.P. Parameterizing turbulent exchange over sea ice: the ice station Weddell results // Boundary-Layer Meteorol. 2005 114: 439-460, содержащие измерители параметров движения воздушных масс их тепловых характеристик, газового состава, влажности и/или атмосферного давления, соединенные проводными или беспроводными цифровыми линиями связи с устройством цифровой обработки результатов измерений.
Наиболее близкой из известных к заявленной системе относится метеорологическая система измерения пространственной структуры атмосферной турбулентности /RU 117188/, выбранная в качестве прототипа и содержащая автоматизированное рабочее место (АРМ) метеоролога, комплект аналоговых метеорологических датчиков (МД), мачтовое оборудование для установки на нем МД, а также - связное оборудование для управления измерениями МД и передачи результатов измерений на АРМ.
При этом известная система /RU 117188/ выполнена с возможностью установки на морском судне и измерения пространственной структуры атмосферной турбулентности над поверхностью морской воды в процессе движения судна. АРМ метеоролога содержит персональную ЭВМ, соединенную через блок аналого-цифровых преобразователей с шиной подключения МД. Комплект измерительных метеорологических датчиков (МД) содержит анемометры, выполненные с возможностью измерения параметров движения воздушных масс и их тепловых характеристик. Для снижения ошибок метеорологических измерений кроме комплекта измерительных метеорологических датчиков (МД) система содержит датчики крена и рыскания судна. Мачтовое оборудование для установки МД содержит мачты фиксированной длины, а также средства крепления мачт к палубе судна и кронштейны жесткого крепления МД к мачтам. Связное оборудование передачи результатов измерений МД, а также - сигналов датчиков крена и рыскания судна на АРМ выполнено кабельным.
Недостатки известной /RU 117188/ метеорологической системы:
- недостаточные функциональные возможности, связанные с привязкой измерений пространственной структуры атмосферной турбулентности (ПСАТ) для водного ландшафта и невозможности её использования для измерения ПСАТ на земном ландшафте в условиях сложного рельефа местности и городской застройки;
- недостаточная точность измерений ПСАТ, связанная с установкой измерительных МД на борту качающегося от волн судна и временной нестационарности указанной ПСАТ в текущих точках измерений.
Постановка задачи.
Задачей изобретения является устранение недостатков известной метеорологической системы /RU 117188/.
Техническим результатом, достигаемым за счет решения указанной задачи, является расширение функциональных возможностей системы по измерению ПСАТ на территориально неоднородном ландшафте с одновременным повышением точности измерений.
Сущность изобретения.
Решение поставленной задачи и достижение заявленного технического результата обеспечивается тем, что метеорологическая система измерения пространственной структуры атмосферной турбулентности (ПСАТ) в неоднородном ландшафте содержит автоматизированное рабочее место (АРМ) метеоролога, комплект метеорологических датчиков (МД), мачтовое оборудование для установки на нем МД, а также - связное оборудование для управления измерениями МД и передачи результатов измерений на АРМ. При этом каждый комплект МД содержит акустические анемометры. Каждый акустический анемометр снабжен пульсационным датчиком скорости (V) ветра и датчиком температуры (toC) воздуха. Сигнальные выходы пульсационных датчиков соединены через устройство сбора и первичной обработки (СПО) данных измерений с цифровым выходом анемометра.
Новыми отличительными признаками в изобретении являются:
- установка АРМ в кузове на автомобильном шасси;
- снабжение АРМ подъемной телескопической мачтой;
- крепление и перевозка телескопической мачты в сложенном состоянии на крыше кузова;
- снабжение телескопической мачты приемопередающей антенной (ППА) связи;
- выполнение АРМ в виде взаимосвязанных интерфейсной шиной сопряжения пульта управления, дисплея, устройства цифровой обработки (УЦО) результатов измерений, устройства сбора данных (УСД), устройства документирования и приёмопередающего устройства (ППУ), снабженного электрическим разъемом для соединения с ППА мачты;
- выполнение комплектов МД для каждого измерительного поста в виде не менее, чем из трех акустических анемометров,
- дополнительное оснащение каждого анемометра датчиком атмосферного давления (P) и датчиком датчик радиационного баланса (Rc), соединенных через устройство СПО с цифровым выходом анемометра;
- снабжение каждого анемометра опорно-поворотными кронштейнами (ОПК) с цифровым управлением;
- выполнение ОПК с тремя степенями свободы для разнесения на мачте соответствующих анемометров по высоте и направлению одновременного измерения параметров воздушных масс в трех взаимно перпендикулярных направлениях, включая вертикальные, меридианные и широтные турбулентные потоки;
- снабжение мачтового оборудования каждого измерительного поста мобильной телескопической мачтой, снабженной подъемным механизмом с цифровым управлением для вертикальной установки мачты и раздвижки её подвижных секций;
- крепление для перевозки и подъема телескопической мачты в сложенном состоянии на прицепном колесном шасси;
- выполнение связного оборудования измерительных постов в виде радиомодема и навигационного приемника для установки на верхние секции телескопических мачт.
Связь отличительных признаков с техническим результатом.
Введение указанных отличительных признаков в метеорологическую систему измерения ПСАТ позволяет создать мобильную метеорологическую систему для оперативного развертывания вокруг мобильного центра (АРМ) управления разнесенных по ландшафту местности измерительных дистанционных постов наблюдения параметров движения воздушных масс, их тепловых и радиационных характеристик на территории наблюдения.
Автоматизация измерительного оборудования постов и дистанционное управление высотой мачт и ориентацией МД позволяет синхронно ориентировать направления приема атмосферных сигналов в Евклидовой системе координат вдоль взаимно перпендикулярных координатных осей x, y, z одновременно на всех постах. В свою очередь, одновременная ориентация МД вдоль указанных координатных осей позволяет синхронно во времени измерять характеристики восходящих и нисходящих потоков воздушных масс, а также направления и параметры составляющих потоков над поверхностью Земли вдоль её широты и меридиану. Навигационные приемники, установленные на мачтах измерительных пунктов, позволяют измерять точное местоположение измерительных МД, рассчитывать на АРМ расстояние между измерительными постами, проводить корреляционную обработку сигналов постов. Корреляционная обработка сигналов различных постов, в свою очередь, по наличию корреляционных сигналов, времени их задержки и известному расстоянию между постами позволяет определять точное направление движения воздушных масс.
Дополнительная к локальным измерениям корреляционная обработка атмосферных сигналов позволяет определять физические механизмы формирования структуры и динамики атмосферной турбулентности в условиях неоднородной поверхности. В частности, в условиях городского ландшафта позволяет рассчитывать характеристики энергетического и теплового баланса между атмосферой и поверхностью Земли в условиях неоднородности указанного ландшафта. Возможности расчета теплового баланса обеспечивают оценку членов уравнений баланса статистических моментов и, соответственно, величину вклада горизонтального и вертикального переноса в формирование турбулентных потоков. Это позволяет разработать схемы расчета характеристик приземного слоя атмосферы для моделей прогноза погоды и климата, включая прогнозирование опасных погодных явлений, ветрового климата города, распространения загрязнений и решения задач городского планирования.
Указанные технические преимущества заявленной метеорологической системы позволяют не только расширить функциональные возможности системы по измерению ПСАТ на территориально неоднородном ландшафте, но и одновременно повысить точность измерений за счет корреляционной обработки ПСАТ.
Ссылка на чертежи.
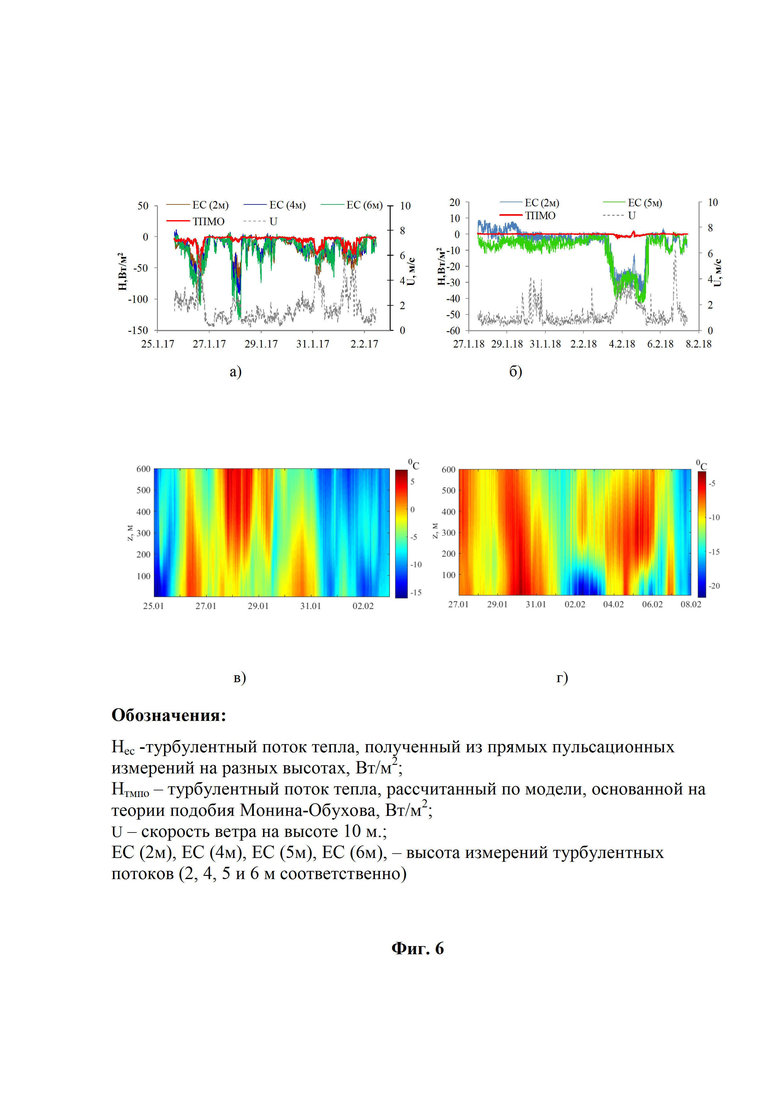
На фиг. 1 представлена функциональная схема метеорологической системы измерения пространственной структуры атмосферной турбулентности (ПСАТ) в неоднородном ландшафте. На фиг.2 - автоматизированное рабочее место (АРМ) 1 метеоролога центрального пункта управления измерениями ПСАТ на базе автомобильного шасси. На фиг. 3 - рисунок, поясняющий конструкцию мобильной антенны измерительного поста в вертикальном (фиг. 3а) и в походном (фиг. 3б) положении на колесном прицепе. На фиг. 4 - метеорологическая система измерения ПСАТ в развернутом положении на неоднородном ландшафте. На фиг. 5 - примеры результатов пульсационных измерений динамической скорости U* (фиг. 5а) и потока тепла H (фиг. 5в). Сравнение между динамической скоростью 



На фиг. 1-8 арабскими цифрами обозначены:
1 - мобильное автоматизированное рабочее место (АРМ) метеоролога - мобильный центр (МЦ) управления;
1.1 - корпус (кузов) АРМ 1;
1.2 -автомобильное шасси АРМ 1;
1.3 -телескопическая мачта АРМ 1;
1.4 - приемопередающая антенна (ППА) мачты 1.3;
1.5 - интерфейсная шина сопряжения;
1.6 - пульт управления;
1.7 - дисплей;
1.8 - устройство цифровой обработки (УЦО) результатов измерений;
1.9 - устройство сбора данных (УСД);
1.10 - устройство документирования;
1.11 -радиомодемное приёмопередающее устройство (ППУ);
2 - комплект метеорологических датчиков (МД);
2.1 - датчик скорости (V) ветра;
2.2 - датчики температуры (toC) воздуха;
2.3 - датчик атмосферного давления (P);
2.4 - датчик 2.4 радиационного баланса (Rc);
2.5 - анемометр;
2.6 - устройство сбора и первичной обработки (СПО)данных;
2.7 - опорно-поворотный кронштейн (ОПК);
2.8 - электропривод ОПК;
3 - мачтовое оборудование;
3.1 - мобильная телескопическая мачта:
3.1.1- подвижная секция телескопической мачты;
3.1.2 - металлическое основание (рама) мачты 3.1;
3.1.3 - подъемный механизм;
3.1.4 - электропривод механизма 3.1.3;
3.1.5 - цифровой блок управления приводом 3.1.4;
3.2 - прицепное колесное шасси;
4 - связное оборудование;
4.1 - радиомодем связи;
4.2 - навигационный приемник.
4.3 - радиолиния цифровой связи;
5 - ландшафт;
6 - измерительный метеорологический пост (МП).
Раскрытие сущности изобретения
Согласно фиг. 1-8 метеорологическая система измерения пространственной структуры атмосферной турбулентности (ПСАТ) в неоднородном ландшафте содержит мобильный центр (МЦ) метеорологических измерений и связанную с ним сеть мобильных метеорологических постов (МП). МЦ содержит автоматизированное рабочее место (АРМ) 1 метеоролога, а МП - комплект 2 метеорологических датчиков (МД), мачтовое оборудование 3 для установки на нем МД, а также - связное оборудование 4 для передачи результатов измерений на АРМ 1. АРМ 1 выполнена с возможностью дистанционного управления аппаратурой измерительных метеорологических пунктов, пространственно разнесёнными по неоднородному ландшафту местности. Для этого АРМ 1 содержит корпус, выполненный в виде кузова 1.1, установленного на автомобильном шасси 1.2 типа КАМАЗ. На крыше кузова 1.1 установлен багажник для перевозки раздвижной телескопической мачты 1.3. Телескопическая мачта 1.3 МП выполнена типа CT-A3-5-5000 с общей регулируемой длинной от 2 до 25 м. Раздвижные секции телескопической мачты 1.3 представляют собой алюминиевые конструкции треугольного или четырехугольного сечения со сторонами от 200 до 600 мм и длиной от 1.5 до 2 м. Продольные образующие секций выполнены из алюминиевых труб диаметром от 30 до 40 мм и толщиной от3 до 4 мм. Поперечная обрешетка секций сделана из змеевидных Z-образных элементов. Секции установлены на металлическом основании- раме, соответствующей форме сечений выдвижных секций мачты 1.3. На нижней секции мачты установлен подъемный механизм для подъема мачты в вертикальное положение и раздвижки её выдвижных секций. Подъемный механизм снабжен электроприводом с цифровым управлением от АРМ 1 (на фигурах не показано). На верхнем конце мачты 1.3 установлена приемопередающая антенна (ППА) 1.4 цифровой связи. ППА 1.4 связана электрическим кабелем с сигнальным и управляющим входами/выходами АРМ 1.
В корпусе 1.1 АРМ 1 установлены связанные интерфейсной шиной 1.5 сопряжения пульт управления 1.6, дисплей 1.7, устройство 1.8 цифровой обработки (УЦО) результатов измерений, устройство 1.9 сбора данных (УСД), устройство 1.10 документирования и приёмопередающее устройство (ППУ) 1.11. УСД 1.10 выполнено в виде блока мультиплексоров и демультиплексоров, УЦО - в виде промышленной ЭВМ, снабжённой программой анализа сигналов (ПАС) измерительных МД, программой расчета пространственной структуры атмосферной турбулентности (ПСАТ) в точках измерений и программой привязки измерений (ПИТЛ) к единому времени и к ландшафту поверхности Земли в районе измерений, а УСД 1.10 - в виде принтера и/или съемного блока памяти для документирования результатов измерений. При этом. ППУ 1.11 снабжен электрическим кабелем и разъемом для соединения с ППА 1.4 мачты 1.3.
Мачта 3.1 периферийного мобильного поста (МП) выполнена по конструкции, аналогичной конструкции мачте 1.3 МЦ. В отличие от мачты 1.3 МЦ мачта 3.1 МП выполнена с возможностью крепления и перевозки ее в сложенном положении на прицепных колесных шасси 3.2. Для установки мачты 3.1 в вертикальное положение на её нижней секции установлен подъемный механизм 3.1.3, снабженным электроприводом 3.1.4, снабженный автономным источником электропитания и цифровым блоком 3.1.5 управления. На подъемных секциях 3.1.1 мачте 3.1 МП установлены комплекты 2 метеорологических датчиков (МД). Комплекты 2 МД для каждого МП состоят не менее, чем из трех высокочастотных акустических анемометров 2.5. Каждый анемометр 2.5 снабжен датчиками 2.1 скорости (V) ветра в трех ортогональных направлениях, датчиком 2.2 температуры (toC) воздуха, датчиком 2.3 атмосферного давления (P) и датчиком 2.4 радиационного баланса (Rc). Датчики 2.1-2.4 соединены через устройство 2.6 сбора и первичной обработки (СПО) данных ПСАТ. Устройство 2.6 СПО выполнено в виде вычислителя, определяющего на основе данных датчиков 2.1-2.4 динамическую скорость (U*), поток явного тепла (H), турбулентную кинетическую энергию (ТКЭ) и турбулентные первые, вторые и третьи их моменты. Выход устройства 2.6 СПО по результатам расчета U*, Н и ТКЭ соединен с цифровым выходом анемометра 2.5. Для обеспечения возможности одновременного измерения параметров вертикальных восходящих и нисходящие турбулентных потоков параллельно оси мачты 3.1, а также для измерения параметров составляющих турбулентных потоков в горизонтальной плоскости вдоль широты и меридиана на высоте измерений анемометры 2.5 снабжены опорно-поворотными кронштейнами (ОПК) 2.7 для крепления их на мачте 3.1. ОПК 2.7 выполнен с тремя степенями свободы и снабжен электроприводом 2.8 с цифровым управлением.
Сигнальные выходы анемометров 2.5 мачт 3.1, а также управляющие входы их ОПК 2.7 соединены с радиомодемом 4.1 мачты 3.1 для дистанционного управления метеорологическими измерениями и передачи результатов измерений на АРМ 1.
Радиомодем 4.1 связи по второму входу соединен с выходом приёмника 4.2 навигационных сигналов (на фигурах не показано) для передачи данных о местоположении измерительного МП на АРМ1 для привязки результатов измерений ПСАТ к единому времени и к ландшафту местности в единой системе координат.
Мачты 3.1 и 1.3 оснащены связным оборудованием 4 соединены между собой беспроводной линией цифровой радиосвязи. Для устойчивости к ветровым нагрузкам мачты 1.3 могут быть оснащены растяжками, а их мобильные носители 1.1 и 3.2 - выдвижными опорами.
Работа метеорологической системы.
Перед началом измерения пространственной структуры атмосферной турбулентности (ПСАТ), включая динамическую скорость (U*), поток явного тепла (H) и турбулентную кинетическую энергию (ТКЭ), в неоднородном ландшафте производится рекогносцировка местности и изучение его ландшафта. Далее определяются возможные места расположения МЦ и МП, пути подъезда и наличие разрешений на подъем мачт 1.3 и 3.1 на требуемую высоту их подъема для проведения качественных метеорологических измерений.
После рекогносцировки ландшафта местности производится развёртывание метеорологической системы в рабочее состояние. Для этого сжатые по длине мачты 3.1 и соответствующие мачтовое оборудование 3 и комплект 2 метеорологических датчиков (МД) загружаются на прицепы 3.2. Далее загруженные прицепы 3.2 с помощью автомобиля, например, типа КАМАЗ 1.2 (фиг. 2), развозятся по местам дислокации МП. При доставке мачты 3.1 на место дислокации производится подключение ее электропривода 3.14 к местной электросети в условиях городского ландшафта или автономному источнику электропитания (дизельному электрогенератору) в полевых условиях. При включении электропривода на прицепном колесном шасси выпускаются выдвижные опоры (не показано). Затем после закрепления опор подъемный механизма поднимает в вертикальное положение сжатую мачту 3.1 и закрепляет её на сформированной опорной площадке в сжатом положений. Далее монтажная бригада метеорологической системы устанавливает на мачте 3.1 2 комплект 2 метеорологических датчиков (МД) и соответствующее связное оборудование 4 для дистанционной передачи данных измерений ПСАТ с МП на МЦ управления системой. Аналогичным образом производится развертывание мобильных мачт 3.1 на других МП системы. После развертывания и оснащения мачт 3.1 и всех периферийных МП измерительным 2, мачтовым 3 и связным 4 оборудованием мобильный ЦП выезжает в центральную часть ландшафта. После приезда ЦП в место дислокации с помощью раздаточной коробки двигателя автомобиля водитель выпускает выдвижные опоры кузова 1.1. После крепления корпуса 1 водитель включает подъемный привод и устанавливает мачту 1.3 в вертикальное положение на крыше кузова 1.1 или рядом на земляную опору и крепит её неподвижной опорной секции к боковой поверхности кузова 1.1. Далее метеоролог АРМ 1 навешивает на верхнюю выдвижную секцию телескопической мачты приемопередающую антенна (ППА) связи с периферийными МП и переходит к пульту 1.6 управления АРМ1. С помощью пульта 1.6 управления метеоролог включает аппаратуру ЦП управления и дистанционно через беспроводную систему 4 связи - аппаратуру периферийных МП. После включения указанной аппаратуры и выход её на рабочий режим метеоролог включает с пульта 1.6 переводит систему в режим функционального контроля. При этом АРМ 1 в соответствии с заданной программой функционального контроля (на фигурах не показано) через связное оборудование 4 проводит опрос измерительной аппаратуры 2 и мачтового оборудования 3 измерительных МП на предмет их работоспособности, уточнения местоположения МП по данным их навигационных приемников 4.2, а также, на предмет возможности дистанционного управления их с АРМ 1. После успешного проведения функционального контроля системы метеоролог на пульте 1.6 включает режим «Измерение ПСАТ».
При этом АРМ 1 через связное оборудование 4 передает на периферийные МП команды на установку соответствующей высоты измерений и требуемую ориентацию анемометров на этой высоте. Радиомодемы связи 4.1 принимают команды с ЭВМ 1 и передают их на цифровой блок 3.1.5 управления приводом 3.1.4 подъемного механизма 3.1.3, а также передают команды управления на электропривод 2.8 опорно-поворотного кронштейна (ОПК) анемометра 2.5.
При этом подъемный механизм 3.1.3 увеличивает длину мачты 3.1 и устанавливает блок анемометров 2.5 на требуемую высоту. При достижении требуемой высоты установки блока анемометров 2.5 один из анемометров 2.5 ориентируется вдоль вертикальной оси для измерения нисходящих и восходящих потоков воздушных масс, а два других - в ниже лежащей горизонтальной плоскости с соответствующей перпендикулярной ориентацией их приёмных каналов вдоль широты и меридиана на требуемой высоте измерений горизонтальных составляющих ПСАТ воздушных масс.
После перевода анемометров 2.5 в измерительное положение АРМ 1 включает синхронный процесс измерений параметров ПСАТ на неоднородном ландшафте.
При этом АРМ 1 с заданной частотой f, (например, f = 20 Гц), выдает управляющие импульсы на измерение параметров ПСАТ одновременно на все анемометры 2.5 периферийных постов. Акустические анемометры 2.5 всех МП 6 одновременно отрабатывают команды и в течении заданного импульсного времени измеряют три ортогональные (вертикальную, меридианную и широтную) компоненты ПСАТ. При этом по каждой ортогональной компоненте анемометры 2.5 измеряют скорость (V) ветра, температуру (toC) воздуха, давление (P) и радиационного баланс (Rc) атмосферного воздуха на высоте измерений соответствующими датчиками 2.1-2.4.
Измеренное значение величин V, toC, P, Rc с соответствующих датчиков 2.1-2.4 в цифровом виде передаются на устройство 2.6 СПО. Устройство 2.6 СПО каждого МП 6 на основе полученных от датчиков 2.1-2.4 данных рассчитывает численное значение К кинетической энергии из выражения

где
V - скорость ветра.
Далее по вычисленному значению К методом частных производных из уравнения энергетического баланса рассчитываются численные значения турбулентных составляющие величины К

где:








Физический смысл составляющих уравнения (2) баланса турбулентной кинетической энергии представлен в таблице 1
Таблица 1





Далее рассчитывается численное значение потока тепла из выражения

По полученному численному значению величины F из уравнения баланса потока тепла определяются его вихревые составляющие

где:



Составляющая 
Рассчитанные из уравнений (1-4) значения составляющих ТКЭ с измерителя 2.6 передаются через радиомодемы 4.1 и линий 4 связи передаются на АРМ 1. ППУ 1.4 АРМ 1 принимает результаты измерений ТКЭ со всех периферийных МП 6 и через устройство 1.9 сбора данных (УСД) и интерфейсную шину 1.5 сопряжения передает их на устройство 1.8 цифровой обработки (УЦО) результатов измерений. УЦО 1 анализирует сигналы измерительных МП, производит расчета пространственной структуры атмосферной турбулентности (ПСАТ) в точках измерений и привязывает результаты измерений ПСАТ к единому времени и к ландшафту поверхности Земли в районе измерений.
Промышленная применимость.
Изобретение разработано на уровне технического проекта, программ расчета параметров ПСАТ на неоднородном ландшафте и физического моделирования заявленной системы и процесса измерений параметров ПСАТ на городском ландшафте (фиг. 8) с использованием анемометров, установленных на земле, на балконах и крышах высотных зданий.
Изобретение может быть использовано для оценки опасных ветровых явлений в сложных ландшафтах и учете их при определении мест строительства заводов по переработке и сжиганию мусора и бытовых отходов, а также - при выборе экологически безопасных районов для строительства жилых домов, детских и оздоровительных учреждений и организации хозяйственной деятельности в прибрежных зонах.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ ПОТРЕБИТЕЛЕЙ МОНИТОРИНГОВОЙ ИНФОРМАЦИЕЙ (МКОПМИ) | 2011 |
|
RU2475968C1 |
| Способ определения усредненных значений метеорологических параметров в пограничном слое атмосферы | 2019 |
|
RU2727315C1 |
| РАДИОЛОКАТОР ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕТРА | 2023 |
|
RU2811547C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЭЛЕКТРОННАЯ ИСПЫТАТЕЛЬНАЯ СТАНЦИЯ | 2014 |
|
RU2579771C2 |
| Автономный мобильный пост оптико-электронного наблюдения | 2022 |
|
RU2835147C2 |
| Способ определения класса устойчивости атмосферы по измерениям метеорологических параметров беспилотным летательным аппаратом | 2021 |
|
RU2756031C1 |
| Система многопараметрического мониторинга района техногенной аварии | 2024 |
|
RU2840313C1 |
| Десантный метеорологический комплект (варианты) | 2023 |
|
RU2811805C1 |
| Мобильный полигонный пункт управления | 2022 |
|
RU2789919C1 |
| ПРИБОР МЕТЕОРОЛОГИЧЕСКИЙ АВТОМАТИЗИРОВАННЫЙ | 2011 |
|
RU2466435C1 |







Изобретение относится к метеорологическим измерительным системам и может быть использовано для измерения пространственной структуры атмосферной турбулентности в неоднородном ландшафте. Сущность: система содержит автоматизированное рабочее место (АРМ) (1) метеоролога для мобильного центра управления, комплект метеорологических датчиков (МД) для периферийных метеорологических постов (МП), мачтовое оборудование постов для установки на нем МД, а также связное оборудование (4) для управления измерениями МД и передачи результатов измерений на АРМ (1). Каждый комплект МД содержит акустические анемометры (2.5), каждый из которых снабжен пульсационным датчиком (2.1) скорости ветра, датчиком (2.2) температуры воздуха, датчиком (2.3) атмосферного давления и датчиком (2.4) радиационного баланса. Сигнальные выходы датчиков соединены через устройство (2.6) сбора и первичной обработки данных измерений с цифровым выходом анемометра. Каждый анемометр (2.5) снабжен опорно-поворотным кронштейном с тремя степенями свободы для приема сигнальной информации вдоль направлений движения вертикальных, широтных и меридианных составляющих воздушных потоков. Корпус АРМ (1) выполнен в виде кузова, установленного на автомобильном шасси. На крыше кузова расположена подъемная телескопическая мачта с приемопередающей антенной (ППА) (1.4) связи, а внутри кузова - связанные интерфейсной шиной (1.5) сопряжения пульт (1.6) управления, дисплей (1.7), устройство (1.8) цифровой обработки результатов измерений, устройство (1.9) сбора данных, устройство (1.10) документирования и приемопередающее устройство (1.11), снабженное электрическим разъемом для соединения с ППА (1.4). Мачтовое оборудование каждого МП включает мобильную телескопическую мачту (3.1), подъемный механизм (3.1.3), прицепное колесное шасси для перевозки мачты и средства крепления мачты в вертикальном положении. Связное оборудование (4) включает комплект радиомодемов (4.1) и навигационных приемников (4.2) для установки на верхние секции телескопических мачт (3.1). Технический результат: повышение точности измерений, расширение функциональных возможностей. 2 з.п. ф-лы, 8 ил., 1 табл.
1. Метеорологическая система измерения пространственной структуры атмосферной турбулентности в неоднородном ландшафте, содержащая автоматизированное рабочее место (АРМ) метеоролога для мобильного центра управления, комплект метеорологических датчиков (МД) для периферийных метеорологических постов (МП), мачтовое оборудование постов для установки на нем МД, а также связное оборудование для управления измерениями МД и передачи результатов измерений на АРМ, причем каждый комплект МД содержит акустические анемометры, каждый из которых снабжен пульсационным датчиком скорости ветра и датчиком температуры воздуха, сигнальные выходы датчиков соединены через устройство (СПО) сбора и первичной обработки данных измерений с цифровым выходом анемометра, отличающаяся тем, что АРМ содержит корпус, выполненный в виде кузова, установленного на автомобильном шасси, на крыше кузова расположена подъемная телескопическая мачта с приемопередающей антенной (ППА) связи, а внутри кузова - связанные интерфейсной шиной сопряжения пульт управления, дисплей, устройство (УЦО) цифровой обработки результатов измерений, устройство (УСД) сбора данных, устройство документирования и приемопередающее устройство, снабженное электрическим разъемом для соединения с ППА, каждый анемометр дополнительно снабжен опорно-поворотным кронштейном с тремя степенями свободы для приема сигнальной информации вдоль направлений движения вертикальных, широтных и меридианных составляющих воздушных потоков и дополнительно содержит датчик атмосферного давления и датчик радиационного баланса, соединенные через СПО с цифровым выходом анемометра, мачтовое оборудование каждого МП включает мобильную телескопическую мачту, подъемный механизм, прицепное колесное шасси для перевозки мачты и средства крепления мачты в вертикальном положении, а связное оборудование - комплект радиомодемов и навигационных приемников для установки на верхние секции телескопических мачт.
2. Метеорологическая система по п. 1, отличающаяся тем, что мобильные телескопические мачты выполнены типа с общей регулируемой длиной от 2 до 25 м, секции телескопической мачты представляют собой алюминиевые конструкции треугольного или четырехугольного сечения со сторонами от 200 до 600 мм и длиной от 1.5 до 2 м, продольные образующие секций выполнены из алюминиевых труб диаметром от 30 до 40 мм и толщиной от 3 до 4 мм, поперечная обрешетка сделана из змеевидных Z-образных элементов, секции установлены на металлическом основании-раме, соответствующей форме сечений выдвижных секций мачты, на нижней секции которой установлен подъемный механизм с цифровым управлением.
3. Метеорологическая система по п. 1, отличающаяся тем, что УСД выполнено в виде блока мультиплексоров и демультиплексоров, УЦО - в виде промышленной ЭВМ, снабженной программой анализа сигналов измерительных МД, программой расчета пространственной структуры атмосферной турбулентности в точках измерений и программой привязки измерений к единому времени и к ландшафту поверхности Земли в районе измерений, а УСД - в виде принтера и/или съемного блока памяти для документирования результатов измерений.
| Чесальная машина | 1946 |
|
SU69267A1 |
| Устройство для раскупорки оцинкованных пакетов с жестью | 1958 |
|
SU117188A1 |
| KR 100996513 B1, 25.11.2010. | |||

