Изобретение относится к области радиационного контроля объектов использования атомной энергии, а именно к способам и устройствам, предназначенным для проведения радиометрических и спектрометрических измерений придонной радиоактивности в глубоководных акваториях и может применяться для определения радиационной обстановки в районе размещения радиационно-опасных предприятий в условиях нормальной эксплуатации контролируемого объекта и при аварийных промышленных сбросах радиоактивных продуктов в морскую или речную акватории, а также в условиях радиационных аварий на объектах использования атомной энергии, сопровождающихся сбросами радиоактивных продуктов в пруды-охладители [63B 38/00, G01T 1/16].
Из уровня техники известна ЗАЯКОРЕННАЯ ПРОФИЛИРУЮЩАЯ ПОДВОДНАЯ ОБСЕРВАТОРИЯ [RU 2545159 C1, опубл. 27.03.2015], сочлененная с диспетчерской станцией и состоящая из: подповерхностного буя, заякоренного с помощью стального буйрепа, который служит ходовым тросом для профилирующего носителя, содержащего комплект измерительных датчиков, включающих датчики измерения температуры, электропроводности и давления, акустический доплеровский измеритель течения, датчик растворенного в воде кислорода, модуль центрального микроконтроллера, электропривод, и передвигающегося по ходовому тросу; системы цифровой связи посредством бесконтактной индуктивной врезки в ходовой трос, поверхностного буя-вехи с модемами передачи данных и телеметрической информации по радиоканалу, гидроакустического размыкателя якорного балласта, отличающаяся тем, что на ходовом тросе над гидроакустическим размыкателем якорного балласта закреплена нижняя плавучесть шарообразной формы, внутри которой размещен модем гидроакустического канала связи, электропривод, сочлененный с телескопическим устройством, в оконечности которого установлен сейсмометр, а профилирующий носитель дополнительно содержит датчики содержания углеводородов, углекислого газа, альфа-, бета- и гамма- радиоактивности.
Недостатком аналога является ограниченная степень свободного перемещения описанной обсерватории, обусловленная использованием подповерхностного буя, заякоренного с помощью стального буйрепа.
Также известен КОМПЛЕКС ДЛЯ КОНТРОЛЯ ЭКОЛОГИЧЕСКОГО СОСТОЯНИЯ АКВАТОРИИ [RU 3041 U1, опубл. 16.10.1996], содержащий подводную буксируемую систему, включающую блок датчиков и устройство водозабора, систему отбора проб донного грунта, телеуправляемый подводный аппарат, связанный входом и выходом с выходом и входом пульта управления, и систему ультразвукового зондирования толщи воды, отличающийся тем, что в него введены центральная вычислительная система, система контроля приповерхностного слоя воды, включающая блок датчиков и устройство водозабора, система отбора проб воды из придонного слоя, две системы гидрохимического анализа воды, устройство первичной обработки измерений систем гидрохимического анализа, два блока отбора анализируемых проб воды с превышением предельно допустимой концентрации загрязнения, блок измерения радиоактивности отбираемых проб грунта, датчик радиоактивности воздуха и переключаемый вентиль, два входа которого посредством гидромагистралей связаны с выходами соответственно системы отбора проб воды из придонного слоя и устройства водозабора подводной буксируемой системы, а его выход посредством гидромагистрали подключен к входу второй системы гидрохимического анализа, аналогичный вход первой системы гидрохимического анализа подключен к устройству водозабора системы контроля приповерхностного слоя воды, при этом первая система гидрохимического анализа выходами с первого по четвертый подключена, соответственно, к входам с второго по пятый устройства первичной обработки измерений систем гидрохимического анализа, вторая система гидрохимического анализа выходами с первого по четвертый подключена к входам с шестого по девятый устройства первичной обработки измерений систем гидрохимического анализа, информационные входы обеих систем гидрохимического анализа подключены соответственно к первому и второму информационным выходам устройства первичной обработки измерений систем гидрохимического анализа, а их гидравлические выходы связаны посредством гидромагистралей с входами, соответственно, первого и второго блоков отбора анализируемых проб воды с предельно допустимой концентрацией загрязнения, управляющие входы которых подключены к первому, второму и к третьему и четвертому управляющим выходам устройства первичной обработки измерений систем гидрохимического анализа, информационный вход/выход которого посредством интерфейсной магистрали связан с входом/выходом центральной вычислительной системы, первый и второй входы которой подключены к выходам блоков датчиков соответственно, системы контроля приповерхностного слоя воды и подводной буксируемой системы, третий вход центральной вычислительной системы соединен с выходом измерителя радиоактивности отбираемых проб грунта, четвертый и пятый входы центральной вычислительной системы подключены, соответственно, к выходам датчика измерения радиоактивности воздуха и оптического локатора, шестым входом центральная вычислительная система связана с системой спутниковой навигации, а седьмым и восьмым входами/выходами упомянутая система связана с пультом управления и с системой ультразвукового зондирования толщи воды, выход центральной вычислительной системы связан с системой управления судном, при этом управляющие входы системы контроля приповерхностного слоя воды, системы отбора проб воды из придонного слоя, переключаемого вентиля, подводной буксируемой системы и системы отбора проб донного грунта связаны с системой управления судном.
Недостатком аналога является высокие трудоемкость и трудозатраты измерений и отсутствие автономности системы, обусловленные жесткостью связью между буксируемой системой, содержащей измерительную аппаратуру, с судном, осуществляющим перемещение над исследуемой областью акватории.
Известен ДИСТАНЦИОННЫЙ МЕТОД РАДИАЦИОННОГО КОНТРОЛЯ ДОННЫХ ОТЛОЖЕНИЙ [https://www.atomic-energy.ru/technology/18974, опубл. 22.10.2019], реализованный в устройстве «Нырок-2», содержащем герметичный контейнер с размещенным в нем блоком детектирования, свинцовым коллиматором, к контейнеру соединен шланг с возможностью обеспечения вентиляции блока детектирования и отвода испарений азота, блок детектирования подключен к анализатору спектра, анализатор спектра соединен с блоком сбора, обработки и вывода информации, выполненным в виде ПЭВМ.
Недостатком аналога является низкая эффективность комплекса по поиску и определению природы источника радиоактивного излучения в глубоководных акваториях, обусловленная низкой степенью свободы из-за жесткой связи с плавсредством.
Наиболее близким по технической сущности является СПОСОБ ПОИСКА РАДИОАКТИВНЫХ ОБЪЕКТОВ ПОД ВОДОЙ И КОМПЛЕКС ДЛЯ РЕАЛИЗАЦИИ СПОСОБА [RU 2420762 C1, опубл. 10.06.2011], включающий прикрепление детектора к тросу, прикрепление конца троса к плавательному средству, буксирование детектора за трос в толще воды на определенной глубине по заданной траектории движения, срабатывание детектора при обнаружении радиоактивного объекта, анализ выходных сигналов детектора на превышение допустимого значения радиации, отличающийся тем, что детектор выполняют состоящим из звеньев, монтируют на среднем участке троса, свободные концы которого закрепляют на лебедках двух плавательных средств, трос разворачивают и опускают на дно таким образом, чтобы детектор образовал сплошную зону чувствительности, двигают плавательные средства параллельными курсами, стравливая лебедками свободные концы троса, останавливают и фиксируют плавательные средства, синхронно наматывают свободные концы троса лебедками, тем самым буксируют детектор по дну, поддерживают постоянное расстояние от детектора до дна, выявляют места отклонения от этой постоянной величины, при срабатывании детектора прекращают буксирование детектора и выявляют место нахождения радиоактивного объекта по расположению сработавшей составной части детектора.
Комплекс для поиска радиоактивных объектов под водой, содержащий подводный детектор радиоактивного излучения, закрепленный на устройстве погружения и удержания его на заданной глубине, буксирующее устройство, источники питания, контроля и обработки выходного сигнала детектора, отличающийся тем, что дополнительно введены ограничители расстояния от детектора до дна, буксирующее устройство выполнено в виде двух плавательных средств, снабженных лебедками, детектор выполнен составным из N последовательно соединенных звеньев, между которыми закреплены ограничители расстояния, а устройство погружения и удержания выполнено в виде буксирно-кабельного троса, свободные концы которого закреплены на лебедках.
Основной технической проблемой прототипа является низкая эффективность комплекса по поиску и определению природы источника радиоактивного излучения обусловленная измерением комплекса только превышения уровня радиоактивного излучения, а также невозможность проведения измерений источника радиоактивного излучения, расположенного в глубоководных акваториях и акваториях со сложным или отсутствующим фарватером из-за жесткой связи средства погружения с плавсредством.
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом изобретения является обеспечение возможности определения изотопного состава источников радиоактивного загрязнения донной поверхности глубоководных и труднодоступных акваторий.
Указанный технический результат достигается за счет того, что способ получения данных придонной радиоактивности в глубоководных акваториях, характеризующийся направлением и погружением средства погружения со встроенным на его борту средством обнаружения радиоактивного излучения в заданный сектор акватории, обнаружением радиоактивного объекта, передачей и анализом выходных сигналов детектора, отличающийся тем, что перед началом использования калибруют энергетическую шкалу гамма-спектрометра и устанавливают время набора энергетического спектра γ-излучения радионуклидов, загрязняющих донную поверхность акватории, с интерфейса пользователя передают управляющие средством погружения сигналы, в процессе прохождения через границу сред управляющие сигналы преобразуют и фокусируют на приемопередающем устройстве средства погружения, преобразуют управляющий сигнал в исполнительную команду, подают ее на исполнительное устройство средства погружения и направляют средство погружения к заданной точке донной поверхности, в процессе перемещения средства погружения корректируют меридиональный и азимутальный углы положения приемопередающего устройства средства погружения, при достижении заданной точки останавливают средство отбора и подают управляющий сигнал на отбор данных от источника радиоактивного излучения, регистрируемое γ-излучение преобразуют в аппаратурный спектр и передают в виде информационного сигнала через приемопередающее устройство средства погружения с обратным преобразованием на интерфейс пользователя, в котором из полученных данных определяют площади пиков полного поглощения гамма-излучения различных нуклидов, рассчитывают весовые множители, характеризующие вклад каждого из них в величину суммарной активности радионуклидов и парциальные активности интересующих радионуклидов, загрязняющих подстилающую поверхность.
В частности, энергетическую шкалу калибруют радиоизотопами с известной схемой распада и энергией γ-излучения.
В частности, для распространения под водой сигнал преобразуют в ультразвуковой сигнал.
В частности, при отсутствии отклика управляющих механизмов средства погружения на управляющий сигнал упомянутый сигнал передают повторно.
В частности, в процессе погружения осуществляют контроль за погружением средства погружения и за подводным пространством.
В частности, меридиональный и азимутальный углы положения приемного устройства корректируют с возможностью получения максимального уровня приемного сигнала.
В частности, площади пиков полного поглощения, весовые множители и парциальные активности интересующих радионуклидов рассчитывают по амплитудному распределению семейства «монолиний», каждая из которых характеризуется амплитудой A(Ei) по шкале амплитуд, энергией Ei по шкале энергий и полушириной пика ΔEi, измеряемой на его полувысоте.
Указанный технический результат достигается за счет того, что система получения данных придонной радиоактивности в глубоководных акваториях, содержащая устройство погружения, детектор радиоактивного излучения, закрепленный на устройстве погружения, источники питания, контроля и обработки выходного сигнала детектора, отличающаяся тем, что дополнительно содержит модуль движения, модуль управления, модуль сбора данных, модуль передачи данных и интерфейсный модуль, устройство погружения выполнено в виде подводного комплекса, состоящего из герметичного корпуса с технологическим люком в верхней части, средствами управления, выполненными в виде гребных винтов и рулей, модуль движения содержит средства всплытия и погружения, выполненные в виде танков балластных вод с насосами, размещенные под днищем с левого и правого борта корпуса устройства погружения и воздушной камеры, размещенной по центру внутри корпуса, средства всплытия и погружения снабжены клапанами для подачи воздуха и регулирования соотношения воздуха и воды в упомянутых танках, модуль управления смонтирован внутри корпуса средства погружения и выполнен с возможностью управления средствами управления, всплытия и погружения средства погружения, модуль сбора данных содержит детектор, соединенный с ним спектрометр и датчики наблюдения, при этом спектрометр и детектор смонтированы внутри корпуса средства погружения так, что детектор размещен в нижней точке днища корпуса, а датчики наблюдения смонтированы снаружи под днищем в передней части корпуса, модуль передачи данных содержит буферный блок и блок управления антенной с двигателями управления положением приемопередающего датчика в азимутальном и меридиональном направлениях и приемопередающий датчик, выполненный в виде ультразвукового приемопередатчика, а буферный блок содержит ультразвуковой приемопередатчик и приемопередатчик, соединенные между собой через конвертер, ультразвуковой приемопередатчик соединен с ультразвуковым приемопередатчиком блока управления антенной, а приемопередатчик соединен с приемопередатчиком интерфейсного модуля, интерфейсный модуль также содержит манипулятор, выполненный с возможностью управления средствами управления, всплытия и погружения средства погружения, блок сбора и обработки информации, соединенный с блоком ввода/вывода информации и блоком хранения информации.
В частности, технологический люк снабжен запирающим устройством.
В частности, рули выполнены с возможностью поворота устройства погружения в вертикальной и горизонтальной плоскости.
В частности, средства всплытия и погружения соединены между собой трубопроводами.
В частности, клапана выполнены в виде электромагнитных клапанов.
В частности, датчики наблюдения выполнены с возможностью контроля за погружением средства погружения и за подводным пространством.
В частности, двигатель управления положением приемопередающего датчика в азимутальном направлении выполнен в виде шагового двигателя.
В частности, двигатель управления положением приемопередающего датчика в меридиональном направлении выполнен в виде серводвигателя.
В частности, приемопередатчики буферного блока и интерфейсного модуля выполнены в виде радиомодемов.
В частности, буферный блок смонтирован на границе с водной средой.
В частности, интерфейсный модуль смонтирован на средстве транспортировки устройства погружения.
В частности, интерфейсный модуль смонтирован на земной поверхности.
В частности, блок сбора и обработки информации выполнен в виде ПЭВМ.
В частности, модули движения, управления, сбора данных, передачи данных и интерфейсный модуль выполнены на базе контроллеров.
Краткое описание чертежей
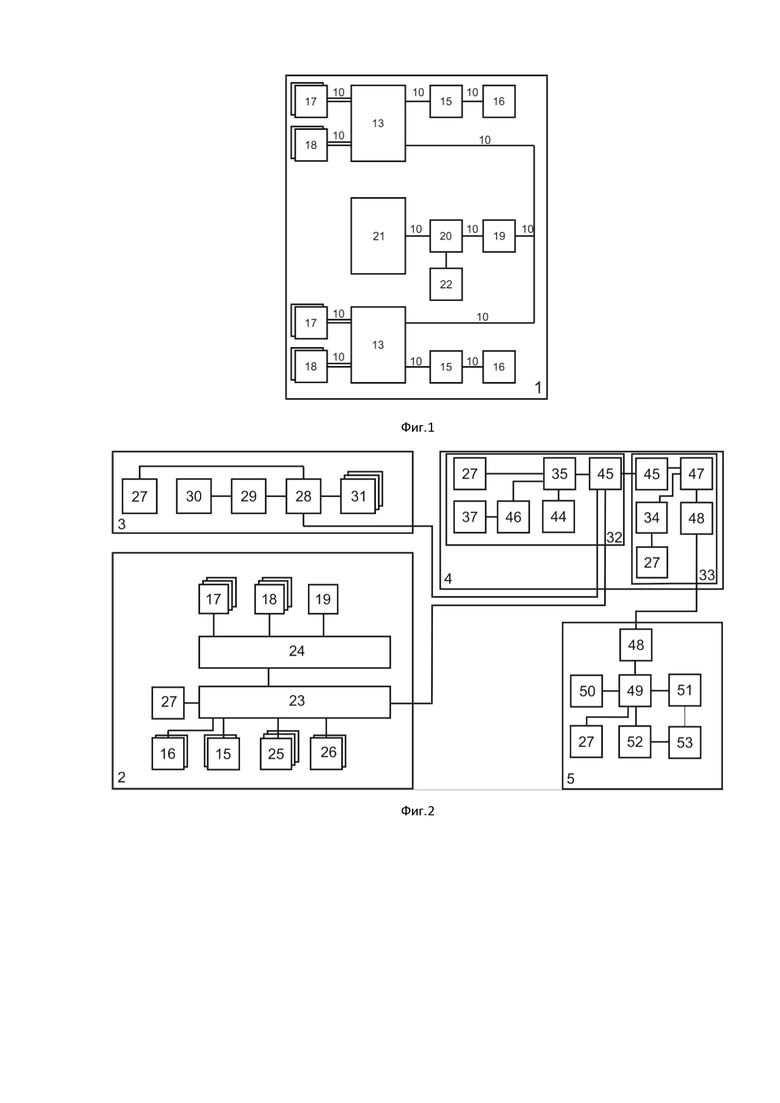
На фиг.1 схематично показана система получения данных придонной радиоактивности в глубоководных акваториях.
На фиг.2 показан схематично модуль управления.
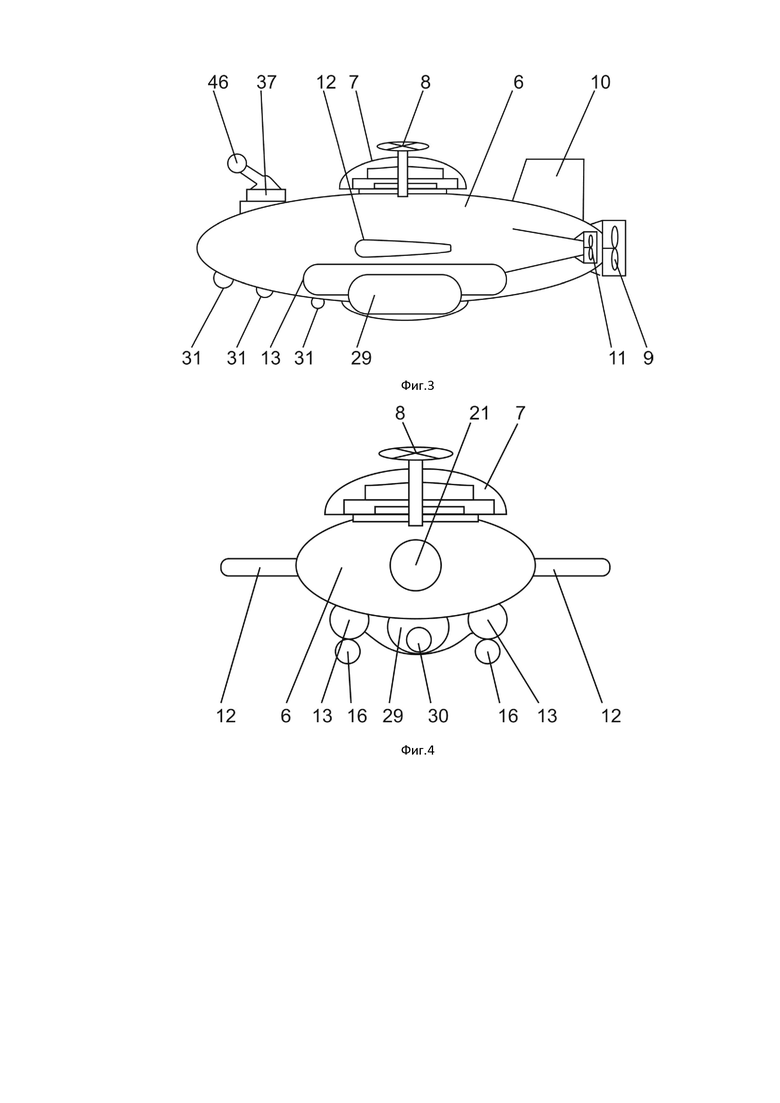
На фиг.3 показан схематично модуль циклического погружения и всплытия.
На фиг.4 показан вид сбоку подводного дозиметрического комплекса.
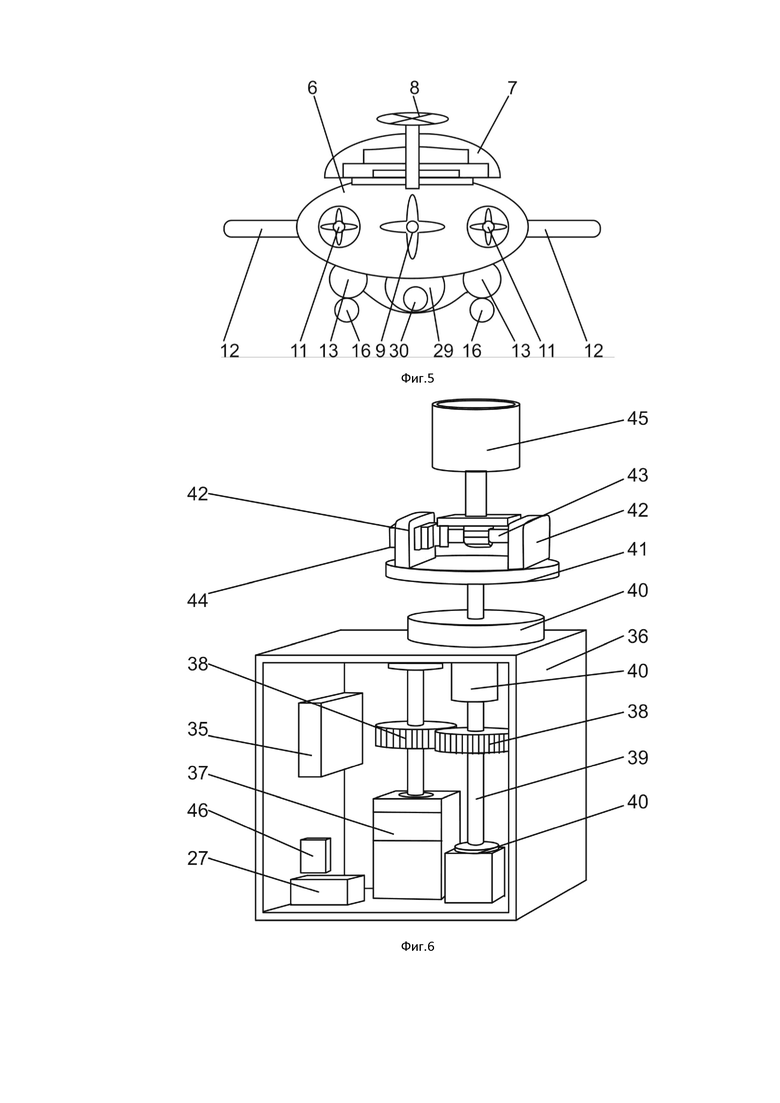
На фиг.5 показан вид спереди подводного дозиметрического комплекса.
На фиг.6 показан вид сзади подводного дозиметрического комплекса.
На фигурах показано: 1 - модуль движения, 2 - модуль управления, 3 - модуль сбора данных, 4 - модуль передачи данных, 5 - интерфейсный модуль, 6 - корпус, 7 - технологический люк, 8 - запирающее устройство, 9 - силовой винт, 10 - килевой руль, 11 - поворотные винты, 12 - горизонтальные рули, 13 - танки балластных вод, 14 - трубопроводы, 15 - расходомеры, 16 - насосы, 17 - управляемые клапаны для стравливания воздуха, 18 - управляемые клапаны для подачи/сброса воды, 19 - управляемый клапан подачи воздуха, 20 - редуктор, 21 - газгольдер, 22 - манометр, 23 - контроллер управления, 24 - блок реле, 25 - драйверы двигателей, 26 - драйверы приводов, 27 - блоки питания, 28 - контроллер управления сбором данных, 29 - гамма-спектрометр, 30 - блок цифровой электроники гамма-спектрометра, 31 - датчики наблюдения, 32 - блок управления антенной, 33 - буферный блок, 34 - контроллер буферного блока, 35 - контроллер блока управления антенной, 36 - корпус блока, 37 - шаговый двигатель, 38 - шестерни, 39 - вал, 40 - втулки, 41 - опорная пластина, 42 - вертикальные держатели, 43 - вал серводвигателя, 44 - серводвигатель, 45 - приемопередающий датчик, 46 - драйвер шагового двигателя, 47 - конвертер, 48 - приемопередатчик, 49 - контроллер интерфейсного модуля, 50 - манипулятор, 51 - блок сбора и обработки информации, 52 - блок ввода/вывода информации, 53 - блок хранения информации.
Осуществление изобретения
Система получения данных придонной радиоактивности в глубоководных акваториях содержит подводный дозиметрический комплекс, модуль движения 1 (см.Фиг.1), модуль управления 2, модуль сбора данных 3, модуль передачи данных 4 и интерфейсный модуль 5 (см.Фиг.2).
Подводный дозиметрический комплекс содержит герметичный корпус 6 (см.Фиг.3-5), в верхней части которого смонтирован технологический люк 7 с запирающим устройством 8. В кормовой части корпуса смонтирован силовой винт 9 и килевой руль 10, а с боков кормовой части смонтированы поворотные винты 11. С левого и правого борта корпуса 6 смонтированы горизонтальные рули 12.
Модуль движения 1 содержит танки балластных вод 13 смонтированные симметрично под днищем с левого и правого борта корпуса 6 подводного дозиметрического комплекса. К каждому из танков балластных вод 13 трубопроводами 14 (см.Фиг.1), снабженные расходомерами 15 подключены насосы 16 для закачки забортной воды в упомянутые танки 13. Каждый из танков балластных вод 13 снабжен управляемыми клапанами для стравливания воздуха 17 и подачи/сброса воды 18, выполненными, например, в виде электромагнитных, размещенных с торцов, при этом управляемые клапаны для стравливания воздуха 17 смонтированы в верхних частях торцов, а управляемые клапаны для подачи/сброса воды 18 - в нижних. Танки для балластных вод 13 трубопроводами 14 через общий управляемый клапан подачи воздуха 19 и редуктор 20 соединены с газгольдером 21, смонтированном внутри корпуса 6. Газгольдер 21 оснащен манометром 22.
Модуль управления 2 смонтирован внутри корпуса 6 подводного дозиметрического комплекса и содержит контроллер управления 23 (см.Фиг.2), к управляющим выходам которого подключены блок реле 24, насосы 16 и расходомеры 15 модуля движения 1, драйверы двигателей 25 силового 9 и поворотных 11 винтов и драйверы приводов 26 килевого 10 и горизонтальных 12 рулей. К управляющим контактам блока реле 24 подключены управляемые клапаны для стравливания воздуха 17 и подачи/сброса воды 18 и управляемый клапан подачи воздуха 19 модуля движения 1. Питание модуля управления 2 выполнено от блока питания 27, выполненным в виде автономного источника электроэнергии.
Модуль сбора данных 3 содержит контроллер управления сбором данных 28. К контроллеру управления сбором данных 28 подключены гамма-спектрометр 29 с блоком цифровой электроники гамма-спектрометра 30 и датчики наблюдения 31, например, видеокамера, эхолот, фонарь и т.д. Питание модуля сбора данных выполнено от блока питания 27. Контроллер управления сбором данных 28, гамма-спектрометр 29 и блок цифровой электроники гамма-спектрометра 30 смонтированы внутри корпуса 6, при этом гамма-спектрометр 29 смонтирован в нижней точке днища корпуса 6, а датчики наблюдения 31 смонтированы под днищем снаружи корпуса 6 подводного дозиметрического комплекса.
Модуль передачи данных 4 содержит блок управления антенной 32 и буферный блок 33. Блок управления антенной 32 содержит корпус блока 36 (см.Фиг.6), внутри которого смонтированы шаговый двигатель 37, соединенный зубчатой передачей, выполненной в виде шестерен 38, с валом 39 смонтированном в корпусе блока 36 на втулках 40 с подшипниками. На валу 39 снаружи корпуса блока 36 вертикально смонтирована опорная пластина 41, на которой между вертикальными держателями 42 смонтирован вал серводвигателя 43 с серводвигателем 44. На валу серводвигателя 43 смонтирован приемопередающий датчик 45, выполненный в виде ультразвукового приемопередатчика, при этом приемопередающий датчик 45 смонтирован на валу 39 и валу серводвигателя 43 с возможностью отклонения в меридиональном направлении от 0 до π/2 и в азимутальном ‒ от 0 до π. Ко входам приемопередающего 45 подключены выходы контроллера управления 23 и контроллера управления сбором данных 28. Шаговый двигатель 37 через драйвер шагового двигателя 46 и серводвигатель 44 подключены к контроллеру блока управления антенной 35. Блок управления антенной 32 смонтирован внутри корпуса 6 подводного дозиметрического комплекса, а приемопередающий датчик 45 упомянутого блока 32 смонтирован в верхней части носовой или кормовой части снаружи корпуса 6. Буферный блок 33 содержит аналогичный блоку управления антенной 32 приемопередающий датчик 46, соединенный с контроллером буферного блока 34. К выходу контроллера буферного блока 34 через конвертер 47 подключен приемопередатчик 48 буферного блока 33, при этом приемопередатчик 48 буферного блока 33 выполнен в виде радиомодема. Блок управления антенной 32 смонтирован внутри корпуса 6 подводного дозиметрического комплекса. Питание блока управления антенной 32 и буферного блока 33 выполнено от блоков питания 27.
Интерфейсный модуль 5 содержит контроллер интерфейсного модуля 49 с соединенными к его входам/выходам приемопередатчик 48, аналогичный приемопередатчику 48 буферного блока 33, манипулятором 50, блоком сбора и обработки информации 51, блоком ввода/вывода информации 52 и блоком хранения информации 53. Манипулятор 50 выполнен в виде джойстика или потенциометров с возможностью ручного управления модулем управления 2. Блок сбора и обработки информации 51 выполнен в виде ПЭВМ. Блок ввода/вывода информации 52 выполнен в виде сенсорного экрана или мобильного устройства (планшета, смартфона, коммуникатора и т.д.) и подключен к блоку сбора и обработки информации 51 и блоку хранения информации 53, выполненным в виде сервера. Блок хранения информации 53 соединен с блоком сбора и обработки информации 51. Питание интерфейсного модуля 5 выполнено от блока питания 27.
Систему получения данных придонной радиоактивности в глубоководных акваториях используют следующим образом.
Перед началом использования производят калибровку энергетической шкалы гамма-спектрометра 29, используя радиоизотопы с известной схемой распада и энергией γ-излучения и задают время набора спектра γ-излучения радионуклидов, загрязняющих донную поверхность акватории.
Закрывают управляемые клапаны для стравливания воздуха 17 и подачи/сброса воды 18. Заправляют газгольдер 21 подводного дозиметрического комплекса воздухом, контролируя его давление внутри газгольдера 21 по манометру 22, открывают редуктор 20, заполняют танки балластных вод 13 воздухом из газгольдера 21 и спускают подводный дозиметрический комплекс на воду.
Манипулятором 50 подают управляющий аналоговый сигнал на контроллер интерфейсного модуля 49, с которого преобразованную в управляющую команду сигнал подают на приемопередатчик 48. С приемопередатчика 48 сигнал передают на приемопередатчик 48 буферного блока 33 модуля передачи данных 4, размещенного на водной поверхности над предполагаемым местом дозиметрических исследований. Сигнал с приемопередатчика 48 буферного блока 33 передают на конвертер 47, управляемый контроллером буферного блока 34, а затем преобразованный сигнал передают на приемопередающий датчик 45 буферного блока 33. С приемопередающего датчика 45 буферного блока 33 сигнал передают на аналогичный приемопередающий датчик 45 блока управления антенной 32 подводного дозиметрического комплекса, далее на контроллер управления 23 модуля управления 2. С контроллера управления 23 модуля управления 2 после получения управляющей команды отправляют на контроллер интерфейсного модуля 49 в обратной последовательности подтверждающее успешное получение управляющей команды сообщение. При отсутствии подтверждающего получение управляющей команды сообщения от контроллера управления 23 модуля управления 2 с контроллера интерфейсного модуля 49 повторно отправляют сигнал с управляющей командой.
Одновременно с отправкой сообщения о получении управляющей команды с контроллера управления 23 полученный сигнал подают на блок реле 24, отвечающего за работу управляемых клапанов для стравливания воздуха 17 из танков балластных вод 13, расходомеры 15 для подачи определенного объема воды и насосы 16 для заполнения танков балластных вод 13 забортной водой для погружения подводного дозиметрического комплекса, через блок реле 24 на управляемые клапаны подачи/сброса воды 18 и подачи воздуха 19 для замещения воды в танках балластных вод 13 на воздух из газгольдера 21 и всплытия подводного дозиметрического комплекса, на драйвер двигателя 25 силового винта 9 для перемещения подводного дозиметрического комплекса вперед или назад, на драйверы приводов 26 горизонтальных рулей 12, на драйверы двигателей 25 поворотных винтов 11 и драйвер привода 26 килевого руля 10 для поворота подводного дозиметрического комплекса влево или вправо.
Управляя с помощью манипулятора 50 описанным способом подводный дозиметрический комплекс направляют в заданный сектор акватории, осуществляют его погружение к заданной точке донной поверхности. Контроль погружения и наблюдение за подводным пространством осуществляют с помощью датчиков наблюдения 31 модуля сбора данных 3, выполненных в виде эхолота, видеокамеры или других аналогичных устройств.
При увеличении глубины погружения подводного дозиметрического комплекса для обеспечения обмена данными между модулями управления 2, сбора данных 3 и интерфейсным модулем 5 ввиду узкой диаграммы направленности приемопередающих датчиков 48 корректируют меридиональный и азимутальный углы положения приемопередающего датчика 48 блока управления антенной 32, для чего с помощью шагового двигателя 37 изменяют направление меридионального угла от 0 до 180° и обратно, а с помощью серводвигателя 44 направление азимутального угла от 0 до 90°, записывают в контроллер блока управления антенной 35 значения, измеренные встроенным в приемопередающий датчик 45 детектором (на фигурах не показан) значения уровня сигналов с заданным шагом. В контроллере блока управления антенной 35 формируют матрицу, проводят ее анализ, определяют оптимальные направления меридионального и азимутального углов, при которых приемопередающим датчиком 48 были получены максимальные значения уровня сигнала, после чего осуществляют обмен данными между модулями управления 2, сбора данных 3 и интерфейсным модулем 5. Корректировку меридионального и азимутального углов приемопередающего датчика 48 осуществляют при ухудшении уровня сигнала.
После достижения заданной точки останавливают подводный дозиметрический комплекс и с блока ввода/вывода информации 52 интерфейсного модуля 5 через контроллер интерфейсного модуля 49, приемопередатчики 48 интерфейсного модуля 5 и буферного блока 33, конвертер 47, приемопередающие датчики 45 буферного блока 33 и блока управления антенной 32 модуля передачи данных 4 подают сигнал на контроллер управления сбором данных 28 модуля сбора данных 3 для запуска гамма-спектрометра 29 и блока цифровой электроники гамма-спектрометра 30.
Регистрируемое гамма-спектрометром 29 γ-излучение преобразуют в блоке цифровой электроники гамма-спектрометра 30 в энергетический спектр измеренного гамма-излучения, который передают обратной описанной выше последовательностью через контроллер 28 модуля сбора данных 3 в контроллер интерфейсного модуля 49 в виде информационного сообщения. Из интерфейсного модуля 49 данные о зарегистрированном спектре γ-излучения передают в блок сбора и обработки информации 51 и блок ввода/вывода информации 52 интерфейсного модуля 5.
В блоке сбора и обработки информации 51 из данных о параметрах спектра γ-излучения путем их обработки получают амплитудное распределение семейства «монолиний», каждая из которых характеризуется амплитудой Δ(Ei) по шкале амплитуд, энергией Ei по шкале энергий и полушириной пика ΔEi, измеряемой на его полувысоте, определяют площади пиков полного поглощения гамма-излучения различных нуклидов и рассчитывают весовые множители, характеризующие вклад каждого из них в величину суммарной активности радионуклидов.
На основе полученных данных, а также результата измерения мощности дозы в воде рассчитывают парциальные активности интересующих радионуклидов, загрязняющих подстилающую поверхность, в соответствии с выражением:

где 


Ei - энергия γ-излучения i-го радионуклида, регистрируемая γ-спектрометром;


μ(Ei) - коэффициент линейного ослабления γ-излучения с энергией Ei в воде;
А(Ei) - амплитуда γ-линии γ-излучения i-го радионуклида с энергией Ei, регистрируемая γ-спектрометром;
Δ(Ei) - ширина на полувысоте γ-линии i-го радионуклида с энергией Ei, регистрируемая γ-спектрометром;
α(Ei) - энергетическая чувствительность γ-спектрометра;







В случае неисправности одного или нескольких модулей 1-5, препятствующей нормальному функционированию и управлению подводным дозиметрическим комплексом, контроллер управления 23 модуля управления 2 подает сигнал на блок реле 24 для закрытия управляемых клапанов для стравливания воздуха 17 танков балластных вод 13, открытия управляемых клапанов для подачи/сброса воды 18 и управляемого клапана подачи воздуха 19 газгольдера 21. Подаваемый из газгольдера 21 воздух вытесняет воду из танков балластных вод 13 и обеспечивает аварийное всплытие подводного дозиметрического комплекса.
Технический результат изобретения - обеспечение возможности определения изотопного состава источников радиоактивного загрязнения донной поверхности глубоководных и труднодоступных акваторий, который достигается за счет: а) измерения γ-излучения гамма-спектрометром 29 и преобразования полученных данных в энергетический спектр измеренного гамма-излучения в блоке цифровой электроники гамма-спектрометра 29, смонтированных на подводном комплексе, снабженным средствами управления в виде силового 9 и поворотных 11 винтов и килевого 10 и горизонтальных 12 рулей, управляемых модулем движения 1, смонтированным внутри корпуса 6, средствами всплытия и погружения, выполненными в виде танков балластных вод 13 с насосами 16 и газгольдера 21 и датчиками наблюдения 31 за подводным пространством в процессе движения подводного комплекса, б) обеспечения приема сигналов управления модулем управления 2 от манипулятора 59 интерфейсного модуля 5, расположенного на средстве транспортировки подводного комплекса к области исследований или на земной поверхности и передачу аппаратурного спектра в виде информационного сигнала в блок сбора и обработки информации 51 интерфейсного модуля 5 с преобразованием сигналов при передаче в водной среде в ультразвуковые волны с помощью приемопередающих датчиков 45, смонтированных в блоке управления антенной 32 и буферном блоке 33 модуля передачи данных 4 с автоматической фокусировкой в меридиональном и азимутальном направлениях приемопередающего датчика 45 блока управления антенной 32 с возможностью получения максимального уровня приемопередающего сигнала, в) последующим определением в блоке сбора и обработки информации 51 интерфейсного модуля 5 площади пиков полного поглощения гамма-излучения различных нуклидов, весовых множителей и расчетом парциальных активностей интересующих радионуклидов, загрязняющих донную подстилающую поверхность.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ЗАГРЯЗНЕНИЯ РАДИОНУКЛИДАМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ В СЛЕДЕ РАДИОАКТИВНОГО ВЫБРОСА РАДИАЦИОННО-ОПАСНЫХ ПРЕДПРИЯТИЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2388018C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ РАДИОНУКЛИДОВ В ВОЗДУШНОМ ВЫБРОСЕ РАДИАЦИОННО-ОПАСНЫХ ПРЕДПРИЯТИЙ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2299451C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЛАСТИ ПРОТЕЧКИ РАДИОАКТИВНОГО АЗОТА В ПАРОГЕНЕРАТОРАХ ЯДЕРНЫХ РЕАКТОРОВ ТИПА КЛТ-40 | 2020 |
|
RU2754755C1 |
| СИСТЕМА КОНТРОЛЯ РАДИАЦИОННОЙ ОБСТАНОВКИ В ЗОНАХ РАЗМЕЩЕНИЯ ОБЪЕКТОВ АТОМНОЙ ПРОМЫШЛЕННОСТИ | 1994 |
|
RU2042157C1 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| БЛОК ДЕТЕКТИРОВАНИЯ ГАММА-ИЗЛУЧЕНИЯ В СОСТАВЕ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ЛЕГКОГО КЛАССА | 2013 |
|
RU2565335C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ПОТОКА РАДИОАКТИВНОГО ГАЗА И ПЛОТНОСТИ ИОНИЗАЦИИ ГАЗОВОЙ СРЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149410C1 |
| ДОННЫЙ ТРАЛОУСТОЙЧИВЫЙ АВТОНОМНЫЙ ГИДРОАКУСТИЧЕСКИЙ МОДУЛЬ | 2010 |
|
RU2481594C2 |
| ПЕРЕДВИЖНАЯ ЛАБОРАТОРИЯ МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ | 2014 |
|
RU2547742C1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2449325C1 |
Группа изобретений относится к области радиационного контроля объектов использования атомной энергии, а именно для проведения радиометрических и спектрометрических измерений придонной радиоактивности в глубоководных акваториях. Способ получения данных придонной радиоактивности в глубоководных акваториях характеризуется направлением и погружением средства погружения со встроенным на его борту средством обнаружения радиоактивного излучения в заданный сектор акватории, обнаружением радиоактивного объекта, передачей и анализом выходных сигналов детектора, при этом из полученных данных определяют площади пиков полного поглощения гамма-излучения различных нуклидов, рассчитывают весовые множители, характеризующие вклад каждого из них в величину суммарной активности радионуклидов, и парциальные активности интересующих радионуклидов, загрязняющих подстилающую поверхность. Технический результат – возможность определения изотопного состава источников радиоактивного загрязнения донной поверхности глубоководных и труднодоступных акваторий. 2 н. 19 з.п. ф-лы, 6 ил.
1. Способ получения данных придонной радиоактивности в глубоководных акваториях, характеризующийся направлением и погружением средства погружения со встроенным на его борту средством обнаружения радиоактивного излучения в заданный сектор акватории, обнаружением радиоактивного объекта, передачей и анализом выходных сигналов детектора, отличающийся тем, что перед началом использования калибруют энергетическую шкалу гамма-спектрометра и устанавливают время набора энергетического спектра γ-излучения радионуклидов, загрязняющих донную поверхность акватории, с интерфейса пользователя передают управляющие средством погружения сигналы, в процессе прохождения через границу сред управляющие сигналы преобразуют и фокусируют на приемо-передающем устройстве средства погружения, преобразуют управляющий сигнал в исполнительную команду, подают ее на исполнительное устройство средства погружения и направляют средство погружения к заданной точке донной поверхности, в процессе перемещения средства погружения корректируют меридиональный и азимутальный углы положения приемопередающего устройства средства погружения, при достижении заданной точки останавливают средство отбора и подают управляющий сигнал на отбор данных от источника радиоактивного излучения, регистрируемое γ-излучение преобразуют в аппаратурный спектр и передают в виде информационного сигнала через приемопередающее устройство средства погружения с обратным преобразованием на интерфейс пользователя, в котором из полученных данных определяют площади пиков полного поглощения гамма-излучения различных нуклидов, рассчитывают весовые множители, характеризующие вклад каждого из них в величину суммарной активности радионуклидов, и парциальные активности интересующих радионуклидов, загрязняющих подстилающую поверхность.
2. Способ по п.1, отличающийся тем, что энергетическую шкалу калибруют радиоизотопами с известной схемой распада и энергией γ-излучения.
3. Способ по п.1, отличающийся тем, что для распространения под водой сигнал преобразуют в ультразвуковой сигнал.
4. Способ по п.1, отличающийся тем, что при отсутствии отклика управляющих механизмов средства погружения на управляющий сигнал упомянутый сигнал передают повторно.
5. Способ по п.1, отличающийся тем, что в процессе погружения осуществляют контроль за погружением средства погружения и за подводным пространством.
6. Способ по п.1, отличающийся тем, что меридиональный и азимутальный углы положения приемного устройства корректируют с возможностью получения максимального уровня приемного сигнала.
7. Способ по п.1, отличающийся тем, что площади пиков полного поглощения, весовые множители и парциальные активности радионуклидов рассчитывают по амплитудному распределению семейства «монолиний», каждая из которых характеризуется амплитудой A(Ei) по шкале амплитуд, энергией Ei по шкале энергий и полушириной пика ΔEi, измеряемой на его полувысоте.
8. Система получения данных придонной радиоактивности в глубоководных акваториях, содержащая устройство погружения, детектор радиоактивного излучения, закрепленный на устройстве погружения, источники питания, контроля и обработки выходного сигнала детектора, отличающаяся тем, что дополнительно содержит модуль движения, модуль управления, модуль сбора данных, модуль передачи данных и интерфейсный модуль, устройство погружения выполнено в виде подводного комплекса, состоящего из герметичного корпуса с технологическим люком в верхней части, средствами управления, выполненными в виде гребных винтов и рулей, модуль движения содержит средства всплытия и погружения, выполненные в виде танков балластных вод с насосами, размещенные под днищем с левого и правого борта корпуса устройства погружения и воздушной камеры, размещенной по центру внутри корпуса, средства всплытия и погружения снабжены клапанами для подачи воздуха и регулирования соотношения воздуха и воды в упомянутых танках, модуль управления смонтирован внутри корпуса средства погружения и выполнен с возможностью управления средствами управления, всплытия и погружения средства погружения, модуль сбора данных содержит детектор, соединенный с ним спектрометр и датчики наблюдения, при этом спектрометр и детектор смонтированы внутри корпуса средства погружения так, что детектор размещен в нижней точке днища корпуса, а датчики наблюдения смонтированы снаружи под днищем в передней части корпуса, модуль передачи данных содержит буферный блок и блок управления антенной с двигателями управления положением приемопередающего датчика в азимутальном и меридиональном направлениях и приемопередающий датчик, выполненный в виде ультразвукового приемопередатчика, а буферный блок содержит ультразвуковой приемопередатчик и приемопередатчик, соединенные между собой через конвертер, ультразвуковой приемопередатчик соединен с ультразвуковым приемопередатчиком блока управления антенной, а приемопередатчик соединен с приемопередатчиком интерфейсного модуля, интерфейсный модуль также содержит манипулятор, выполненный с возможностью управления средствами управления, всплытия и погружения средства погружения, блок сбора и обработки информации, соединенный с блоком ввода/вывода информации и блоком хранения информации.
9. Система по п.8, отличающаяся тем, что технологический люк снабжен запирающим устройством.
10. Система по п.8, отличающаяся тем, что рули выполнены с возможностью поворота устройства погружения в вертикальной и горизонтальной плоскости.
11. Система по п.8, отличающаяся тем, что средства всплытия и погружения соединены между собой трубопроводами.
12. Система по п.8, отличающаяся тем, что клапана выполнены в виде электромагнитных клапанов.
13. Система по п.8, отличающаяся тем, что датчики наблюдения выполнены с возможностью контроля за погружением средства погружения и за подводным пространством.
14. Система по п.8, отличающаяся тем, что двигатель управления положением приемопередающего датчика в азимутальном направлении выполнен в виде шагового двигателя.
15. Система по п.8, отличающаяся тем, что двигатель управления положением приемопередающего датчика в меридиональном направлении выполнен в виде серводвигателя.
16. Система по п.8, отличающаяся тем, что приемопередатчики буферного блока и интерфейсного модуля выполнены в виде радиомодемов.
17. Система по п.8, отличающаяся тем, что буферный блок смонтирован на границе с водной средой.
18. Система по п.8, отличающаяся тем, что интерфейсный модуль смонтирован на средстве транспортировки устройства погружения.
19. Система по п.8, отличающаяся тем, что интерфейсный модуль смонтирован на земной поверхности.
20. Система по п.8, отличающаяся тем, что блок сбора и обработки информации выполнен в виде ПЭВМ.
21. Система по п.8, отличающаяся тем, что модули движения, управления, сбора данных, передачи данных и интерфейсный модуль выполнены на базе контроллеров.
| СПОСОБ ПОИСКА РАДИОАКТИВНЫХ ОБЪЕКТОВ ПОД ВОДОЙ И КОМПЛЕКС ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2010 |
|
RU2420762C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИОАКТИВНОГО ЗАГРЯЗНЕНИЯ АКВАТОРИЙ | 2010 |
|
RU2441215C1 |
| Часовой механизм с устройством для предсказания | 1960 |
|
SU142219A1 |
| US 4185580 A1, 29.01.1980. | |||

