Изобретение относится к средствам обнаружения подводных радиоактивных объектов, находящихся на донной поверхности или погруженных в неё. К таким объектам могут относиться утерянные при транспортировании контейнеры с ядерными материалами или иные радиоактивные источники, в том числе придонные радиоактивные отложения в водоемах, расположенных в зонах отдыха.
Известен способ подводного радиационного мониторинга, реализованный в оборудовании компании ООО «СИТЕКРИМ» (адрес Интернет: http://www.seatechrim.ru/5951748473), заключающийся в погружении прибора измерения уровня радиоактивности по заданной программе в районе предполагаемого нахождения радиоактивного объекта. Заданная программа включает в себя команду на всплытие прибора при превышении установленного заранее порогового уровня радиации и команду на излучение кодированного радиосигнала при достижении поверхности. Кодированный сигнал принимается спутниковой системой и транслируется в центр радиационного мониторинга. Недостаток данного способа заключается в низкой оперативности обнаружения радиоактивного объекта при необходимости обследования большой территории. Кроме того, данный способ более подходит для стационарного мониторинга радиационной обстановки в контролируемой акватории, а не для поиска радиоактивного объекта в заданном районе вследствие его значительной трудоемкости.
В качестве прототипа выбран способ подводного радиационного мониторинга, заключающийся в погружении детектора радиоактивного излучения на заданную глубину и буксировании его с помощью надводного или подводного плавательного средства с одновременным анализом выходного сигнала на превышение допустимого уровня радиации (патент РФ №2059264, МПК G01T 1/178, 1/203 от 23.04.1993). Главным недостатком данного способа является трудоёмкость, так как для проведения мониторинга участка дна требуется серия повторяющихся челночных проходов плавательного средства над данной территорией. Кроме того, представленный способ неточен, так как при сильном волнении водной поверхности (и/или наличии подводных течений) достаточно сложно удерживать точный курс плавательного средства (а также заданное пространственное положение погруженного детектора), что приводит к образованию непроконтролированных зон. Также стоит отметить, что из-за невозможности точного огибания рельефа дна сканирующим детектором возможно необнаружение радиоактивного объекта на донной поверхности (или погружённого в нее), вследствие ограниченности чувствительности детектора и её зависимости от расстояния до источника радиации.
Задача заключается в создании эффективного способа оперативного и точного обнаружения радиоактивных объектов, находящихся на больших площадях донной поверхности (или погружённых в поверхностный слой донного грунта).
Поставленная задача решается следующим образом.
В способе поиска радиоактивных объектов под водой, включающем прикрепление детектора к тросу, прикрепление конца троса к плавательному средству, буксирование детектора за трос в толще воды на определенной глубине по заданной траектории движения, срабатывание детектора при обнаружении радиоактивного объекта, анализ выходных сигналов детектора на превышение допустимого значения радиации, согласно изобретению
детектор выполняют составным, монтируют на среднем участке троса, свободные концы которого закрепляют на лебедках двух плавательных средств, трос разворачивают и опускают на дно таким образом, чтобы детектор образовал сплошную зону чувствительности, двигают плавательные средства параллельными курсами, стравливая лебедками свободные концы троса, останавливают плавательные средства, фиксируют их, синхронно наматывают свободные концы троса лебедками, тем самым буксируют детектор по дну, поддерживают расстояние между детектором до дна постоянным, выявляют места отклонения от этой постоянной величины, при срабатывании детектора останавливают движение детектора и выявляют место нахождения радиоактивного объекта по расположению сработавшей части детектора.
Для выявления места нахождения радиоактивного объекта, можно локализовать площадку дна, находящуюся под одним или несколькими детекторами, передавшими сигнал о срабатывании.
Расстояние от детектора до дна можно поддерживать меньше величины радиуса области чувствительности детектора, а расстояние между звеньями детектора поддерживают из условия формирования непрерывной зоны чувствительности вдоль всей длины детектора.
В качестве контролируемого параметра радиоактивного излучения можно выявлять гамма-излучение. Порог срабатывания детектора определяют исходя из заданной величины превышения уровня радиации от искомого источника над уровнем местного природного радиоактивного фона.
Можно формировать характерный световой сигнал от звена детектора, зафиксировавшего гамма-излучения, что соответствует присутствию радиоактивного источника.
После фиксирования детектором присутствие радиоактивного источника можно формировать ультразвуковой сигнал от звена детектора, зафиксировавшего гамма-излучения.
Под детектором можно организовать подсветку и видеонаблюдение дна.
Технический результат заключается в том, что в процессе поиска радиоактивного объекта сканирующие звенья детектора образуют единую перемещаемую зону чувствительности, что обеспечивает максимально сплошной охват контролируемой донной территории, практически устраняющий вероятность появления непроконтролированных зон, а также повышает оперативность поиска. Кроме того, за счет буксирования по дну детектора обеспечивается его точное следование рельефу поверхности, что увеличивает вероятность обнаружения радиоактивного объекта, находящегося на донной поверхности или погруженного в нее.
В качестве прототипа выбран комплекс, разработанный компанией ООО СИТЕКРИМ для обнаружения подводных потенциально опасных объектов под названием АУПРМ (автономное устройство подводного радиационного мониторинга). Комплекс содержит подводный детектор радиоактивного гамма-излучения, на базе которого выполнен радиационный спектрометр, устройство погружения и удержания детектора в составе радиационного спектрометра на заданной глубине вблизи дна, буксирующее устройство, блок питания и блоки контроля и обработки выходного сигнала, при этом вся аппаратура размещена в центре радиационного мониторинга.
В качестве недостатка данного комплекса можно отметить трудоемкость его для мониторинга больших площадей, так как необходимо совершать буксировку челночным курсом по обследуемой площади. Кроме того, вследствие трудности удержания заданного курса плавательным средством при сильном волнении на водной поверхности и/или при наличии сильных подводных течений возможно появление непроконтролированных зон. Также стоит отметить, невозможность точного огибания рельефа дна сканирующим детектором, при котором возможно пропускание радиоактивных объектов на донной поверхности.
Задачей настоящего изобретения является создание экономичного комплекса для поиска радиоактивных объектов, находящихся на донной поверхности или погруженных в нее, с повышенной точностью контроля неровной поверхности дна, и реализующего описанный выше способ.
В комплексе для поиска радиоактивных объектов под водой, содержащем подводный детектор радиоактивного излучения, закрепленный на устройстве погружения и удержания его на заданной глубине, буксирующее устройство, источники питания, контроля и обработки выходного сигнала детектора, согласно изобретению дополнительно введены ограничители расстояния от детектора до дна, буксирующее устройство выполнено в виде двух плавательных средств, снабженных лебедками, детектор выполнен составным из N последовательно соединенных звеньев, между которыми закреплены ограничители расстояния, а устройство погружения и удержания выполнено в виде буксирно-кабельного троса, свободные концы которого закреплены на лебедках.
Число звеньев N можно выбрать из условия N=L/1, в котором L - длина детектора, а l - длина проекции на трос области чувствительности одного звена. Подводный детектор радиоактивного излучения может быть выполнен в виде продолговатых трубчатых контейнеров со сцинтилляционным материалом, по меньшей мере, в одном из торцов каждого трубчатого контейнера размещен фотоэлектронный умножитель, выход которого соединен с собственным блоком обработки выходного сигнала. Такая форма позволяет максимальным образом расширить зону чувствительности детектора по всей длине отрезка буксирно-кабельного троса, где он размещается.
Кроме того, ограничители расстояния от детекторов до дна могут быть выполнены в виде колес с радиусом, не превышающим величину радиуса области чувствительности детектора, при этом буксирно-кабельный трос пропущен через отверстия в ступицах колес и через трубчатые контейнеры подводного детектора. Данная форма ограничителей облегчает перемещение отрезка буксирно-кабельного троса по дну, исключая его перекручивание, и обеспечивает для детектора на нем оптимальную зону чувствительности.
Кроме того, каждое звено детектора может быть снабжено световым маяком, подключенным к выходам соответствующих блоков обработки выходных сигналов фотоэлектронных умножителей.
Кроме того, каждое звено детектора может быть снабжено ультразвуковым излучателем, подключенным к выходам соответствующих блоков обработки выходных сигналов фотоэлектронных умножителей.
Каждое звено детектора может быть снабжено системой видеонаблюдения дна с видеовыходом на блок управления комплексом, находящийся на борту какого-либо плавательного средства.
Для обеспечения ударостойкости детекторов внутренние узлы контейнера могут быть помещены в наполнитель.
Эти дополнительные устройства сокращают время на выход к обнаруженному радиоактивному объекту водолазов или подводных аппаратов, направленных с целью поиска и извлечения объекта.
Технический результат заключается в создании широкой сплошной зоны чувствительности, сканирующей донную поверхность и огибающей рельеф дна за счет механического изгиба троса под воздействием перемещающихся ограничителей расстояния от звеньев детектора до дна.
На фиг.1 показано расположение плавательных средств при укладывании буксирно-кабельного троса на дне.
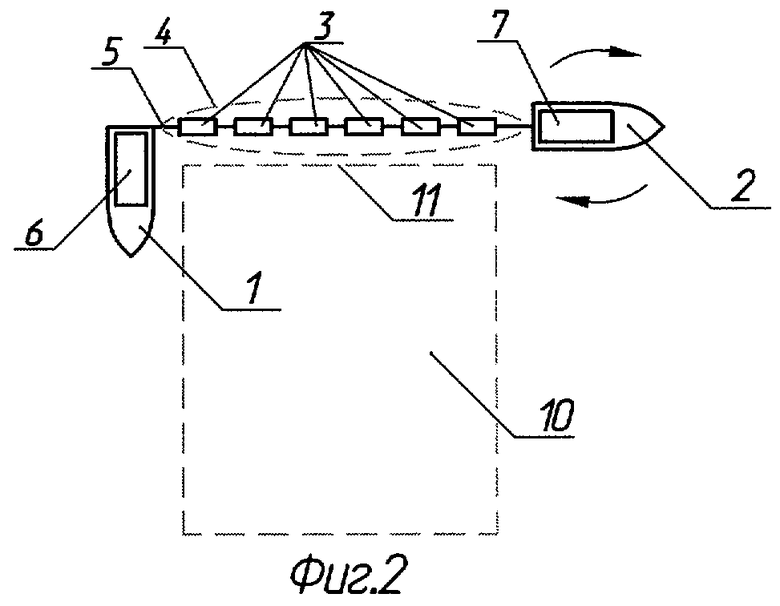
На фиг.2 показано расположение звеньев детектора между плавательными средствами.
На фиг.3 показано движение плавательных средств при стравливании свободных концов.
На фиг.4 показан комплекс для поиска радиоактивных объектов под водой в развернутом состоянии.
На фиг.5 представлен детектор радиоактивного излучения, а также устройство погружения и удержания детектора на заданной глубине.
На фиг.6 показан продольный разрез детектора радиоактивного излучения.
Способ реализуется следующим образом.
Как показано на фиг.1, к намеченному району акватории, где предполагается проведение поисковых работ, выдвигают два плавательных средства, в частном случае корабли 1 и 2. На борту одного из кораблей 1 или 2 располагают N звеньев 3 подводного детектора 4 радиоактивного излучения, которые прикреплены к средней части буксирно-кабельного троса 5 в сложенном состоянии.
В качестве звеньев 3 детектора 4 выбирают детекторы, обнаруживающие гамма-излучения вследствие большой проникающей способности данного вида радиации в водной среде от радиоактивных объектов. Порог срабатывания детектора определяют исходя из заданной величины превышения уровня радиации от искомого источника над уровнем местного природного радиоактивного фона.
Кроме того, расстояние между последовательно размещенными звеньями 3 детектора 4 задают из условия перекрытия зон чувствительности звеньев 3 друг друга, когда детектор 4 находится в развернутом состоянии.
Корабли 1 и 2 оборудованы лебедками 6 и 7, а на корабле 1 установлен блок управления поисковым комплексом 8 и источники питания 9, электрически связанные буксирно-кабельным тросом 5 с детектором 4.
При приближении к намеченному участку дна 10, корабль 1 подводят к границе 11 участка дна 10, ориентируя его курс перпендикулярно границе 11, и ставят на якорь. Корабль 2 подводят кормой к кораблю 1, свободный конец троса 5 закрепляют на лебедке 7. Затем корабль 2 отводят от неподвижного корабля 1, при этом одновременно с лебедки 6 разматывают трос 5. Корабль 2 двигают прямолинейно вдоль границы 11 осматриваемого участка дна 10. Скорость разматывания троса 5 с лебедки 6 поддерживают такой величины, чтобы трос 5 погружался на донную поверхность вдоль границы 11 по траектории движения корабля 2. При этом звенья 3 детектора 4, прикрепленные к тросу 5, укладываются на дно вдоль границы 11 участка 10, образуя непрерывную область чувствительности под детектором 3. При этом звенья 3, находящиеся в начале и конце детектора 4, должны погрузиться на дно участка 10 в непосредственной близости от кормы кораблей 1 и 2 в начальной и конечной точках границы 11. После этого движение корабля 2 и разматывание троса 5 с лебедки 6 прекращают. Корабль 2 разворачивают для ориентирования его курса параллельно курсу корабля 1, как показано на фиг.2.
Далее корабли 1 и 2 перемещаются параллельными курсами в направлении, перпендикулярном границе 11 вдоль границ 12 участка дна 10, как показано на фиг.3.
В процессе указанного перемещения кораблей 1 и 2 одновременно разматывают трос 5 с лебедок 6 и 7. Скорость разматывания троса 5 выбирают из условия сохранения конфигурации зоны чувствительности под детектором 4, т.е. ее неподвижности на донной поверхности вдоль границы 11. После того как трос 5 размотают на определенную длину, корабли 1 и 2 останавливают и фиксируют их положение якорем, как показано на фиг.4.
Подключают детектор 4 кабелем в составе буксирно-кабельного троса 5 к блоку управления 8 и источнику питания 9 на борту корабля 1. Детектор 4 образует сплошную зону чувствительности в виде полосы длиной, равной длине детектора 4, а шириной, равной ширине зоны чувствительности каждого звена 3. Кроме того, расстояние от детектора 4 до дна участка 12 задается и поддерживается равным, или чуть меньшим величине радиуса области чувствительности детектора 4. Лебедками 6 и 7 одновременно с одинаковой скоростью наматывают концы троса 5, который действует на концы детектора 4. Скорость наматывания троса 5 устанавливается исходя из чувствительности детектора 4 к радиоактивному гамма-излучению. Детектор 4 буксируют по дну участка 10 вдоль стороны 12 и сканируют таким образом этот участок 10. За счет буксирования по дну детектора 4 и гибкости троса 5 обеспечивается его точное следование рельефу дна, что увеличивает возможность обнаружения радиоактивного объекта 13, находящегося на поверхности дна участка 10 или погруженного в него.
Выходные сигналы от детектора 4 по кабелю буксирно-кабельного троса 5 поступают на блок управления 8 (рабочее место оператора управления комплексом) на борту корабля 1, где их анализируют, выявляя наличие радиоактивного объекта 13.
При получении сигнала о срабатывании хотя бы одного звена 3 детектора 4 на наличие гамма-излучения локализуют область 14 нахождения радиоактивного источника 13 как площадку участка дна 10, находящуюся под одним или несколькими звеньями 3 детектора 4, передавшими сигнал об обнаружении гамма-излучения.
Локализация области 14 нахождения радиоактивного источника 13 может осуществляться несколькими способами. Например, если обследуется мелководный участок дна участка 10 и высока прозрачность воды, тогда область дна 14 под активизированным звеном 3 детектора 4, визуально наблюдается с поверхности воды и отмечается поисковой командой установкой буя, снабженного якорем. Также возможно использование в составе детектора 4 приемника КРНС (космической радионавигационной системы), например GPS, ГЛОНАСС, Galileo, способного осуществлять определение своих координат в заданном диапазоне глубин. В данном случае локализация местоположения радиоактивного источника 13 осуществляется по данным используемой КРНС, которые передаются вместе с сигналами от звеньев 3 детектора 4 на блок управления 8. При обследовании участка дна 10 на больших глубинах для локализации области 14 обнаруженного радиоактивного источника 13 синхронно останавливают лебедки 6 и 7 в момент времени приема сигнала блоком управления 8 о срабатывании одного или нескольких звеньев 3 детектора 4, направляют к активизированному звену 3 группу водолазов или подводный аппарат, которые выполняют действия по локализации области 14 и извлечению обнаруженного радиоактивного объекта 13.
Для облегчения задачи обнаружения сработавшего звена 3 детектора 4 из него формируют характерный световой и/или ультразвуковой сигнал, по которому водолазы и/или подводные аппараты могут под водой найти место сработавшего звена 3. Формирование светового и/или ультразвукового сигнала упрощает локализацию области 14. В противном случае, если не формируется наводящий сигнал, водолазам потребуется осматривать звенья 3 детектора 4, сличая их номера, разыскивая активизированное звено.
Также возможен вариант локализации, заключающийся в определении местоположения обнаруженных радиоактивных источников 13 как точек на траекториях движения, выдавших сигнал о срабатывании звеньев 3 детектора 4, соответствующих моменту времени фиксирования наличия источника 13 гамма-излучения. Для этого траектория движения отдельного звена 3 детектора 4 может быть оценочно определена, зная координаты начальной точки его погружения на дно участка 10, скорости наматывания троса 5 на лебедки 6 и 7, а также интервала времени между моментами начала движения детектора 4 по дну и до момента времени фиксирования детектором 4 наличия источника 13 гамма-излучения.
В процессе буксирования детектора 4 по участку дна 10 с целью исключения его зацепления за неровности дна, под детектором 4 организуют подсветку с видеонаблюдением, сигналы от которых поступают на блок управления 8. Данная мера также позволяет выявить углубления на дне участка 10, не охватываемые чувствительной областью детектора 4, а в случае необходимости визуально наблюдать радиоактивный объект 13. Видеонаблюдение позволяет более детально изучить объект 13, вызвавший срабатывание детектора 4, и одновременно отслеживать состояние дна участка 10, чтобы не пропустить углубления, недоступные контролю и требующие специального обследования. В этом случае на соответствующие гидрографические карты данного водоема заносят соответствующую информацию с привязкой показаний видеосистемы к координатам водоема.
Стоит отметить, что поисковые работы проводят в районе акватории с известной топологией дна, в котором преобладает относительно равнинный характер.
Размеры района мониторинга могут превышать площадь обследуемого участка дна 10. В данном случае район мониторинга разделяется на соответствующие обследуемые участки.
Таким образом, в процессе поиска радиоактивного объекта 13 детектор 4 перемещается над осматриваемым участком дна 10 сплошной зоной чувствительности. При этом за счет буксирования по дну участка 10 детектора 4 обеспечивается точное следование рельефу поверхности дна, что в результате обеспечивает сплошной контроль этой поверхности, который максимально увеличивает вероятность обнаружения радиоактивного источника 13.
Комплекс для поиска радиоактивных объектов, находящихся на донной поверхности или погруженных в нее, реализующий описанный выше способ, представляет собой устройство погружения и удержания детектора 4 на заданной глубине с закрепленными на нем звеньями 3 детектора 4 радиоактивного излучения и ограничителями расстояния 15. Устройство погружения и удержания детектора 4 на заданной глубине представляет собой совокупность двух кораблей 1 и 2 с лебедками 6 и 7 и буксирно-кабельным тросом 5.
Как показано на фиг.5, звенья 3 детектора 4 радиоактивного излучения и ограничители расстояния 15 от детектора 4 до дна, последовательно чередуясь, закреплены на средней части буксирно-кабельного троса 5, образуя сплошную зону чувствительности (см. фиг.2). Расстояние от детектора 4 до дна задают близким к величине размера области чувствительности детектора 4, а расстояние между звеньями 3 детектора 4 задают из условия формирования непрерывной зоны чувствительности вдоль длины детектора 4. При этом гарантируется надежное восприятие радиоактивного излучения со всего протяженного участка дна под буксируемым тросом 5.
Как показано на фиг.5, буксирно-кабельный трос 5 на отрезке прикрепления детектора 4 разделяется на две части: буксирную, представляющую собой жесткий силовой трос 16, и кабельную, представляющую собой электрический кабель 17, обеспечивающий связь детектора 4 с блоком управления 8 и источниками питания 9. Корпус 18 детектора представляет собой герметичную цилиндрическую оболочку с разъемными торцевыми фланцами, жестко закрепленную при помощи хомутов 19 на тросе 16. Электрический кабель 17 стыкуется с корпусом 18 при помощи герметичных электрических разъемов 20 на торцевых фланцах.
Ограничители расстояния 15 выполнены в виде широкого колеса, включающего в себя ступицу 21, жестко закрепленную на тросе 16, и вращающийся обод 22, закрепленный в подшипнике 23, посаженном на ступицу 21. Электрический кабель 17 пропущен через втулку 24, установленную в ступице 21. Втулка 24 жестко фиксирует электрический кабель 17 относительно ступицы 21.
Детектор 4 обладает положительной плавучестью, а ограничители расстояния 15 - большей по модулю отрицательной плавучестью. Поэтому, находясь на дне, детектор 4 всегда ориентирован над тросом 16, а ограничители расстояния 15 всегда опираются на дно. При буксировании троса 5направление движения детектора 4 параллельно стороне 12 участка дна 10. При этом детектор 4 опирается ограничителями расстояния 15 на дно. При движении детектора 4 по неровностям дна 10, ограничители расстояния 15 в виде колеса накатываются на неровности, при этом неровности не задевают корпусы 18 детектора 4. В результате этого непрерывная зона чувствительности детектора 4 совершает поступательное движение по площади участка дна 10 и колебательные движения в вертикальной плоскости при движении по неровностям дна. Происходит огибание непрерывной зоной чувствительности детектора 4 неровностей дна. Благодаря конструкции ограничителя 15 детектор 4 всегда находится над тросом 16, а кабель 17 не скручивается с тросом 16.
Как показано на фиг.6, корпус 18 звена 3 детектора 4 образован трубой 25 с закрепленными на ней при помощи резьбовых соединений торцевыми фланцами 26. Внутри корпуса 18 размещен сцинтиллятор 27, выполненный в виде цилиндрического стержня из сцинтилляционного материала (чувствительного к гамма-излучению). На торцах сцинтиллятора 27 жестко закреплены фотоэлектронные умножители (ФЭУ) 28, каждый из которых электрически соединен с собственным блоком 29 управления ФЭУ. Внутри корпуса 18 находятся также блок питания 30 детектора 4, пьезоэлектрический ультразвуковой излучатель 31, имеющий звуковывод на поверхность корпуса 18, световой маяк 32 и систему видеонаблюдения дна 33 (видеокамеру), имеющие общее оптически прозрачное окно 34, выполненное в трубе 25. Фотоэлектронные умножители (ФЭУ) 28, блок 29 управления ФЭУ, блок питания 30, ультразвуковой излучатель 31, световой маяк 32 и видеокамера 33 связаны между собой внутренней кабельной разводкой 35, которая коммутируется посредством разъемов 20 с кабелем 17. Внутренние узлы корпуса 18 помещены в наполнитель 36, выполняющий функции термозащиты и ударозащиты электронных и оптических компонентов детектора 4. Материалом наполнителя 36 может служитель вспененный пенопласт или полиэтилен. Наполнитель 36 может быть как насыпным (в виде гранул), так и быть изготовленным в виде двух зеркально симметричных деталей.
Блок управления 8 комплексом, располагающийся на корабле 1, представляет собой персональный компьютер (ноутбук) с сетевым интерфейсом связи, например Ethernet, со звеньями 3 детектора 4. Блок 8 управления комплексом коммутируется с детектором 3 посредством электрического кабеля 17 буксирно-кабельного троса 5.
Источники питания 9 представляют собой дизель-генератор или аккумуляторную батарею.
В настоящее время промышленно освоен выпуск всех перечисленных элементов конструкции поискового комплекса. В связи с этим изготовление данного устройства не вызывает трудностей. Приемлемые габаритные размеры комплекса позволяют использовать готовые плавательные средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ПОЛУЧЕНИЯ ДАННЫХ ПРИДОННОЙ РАДИОАКТИВНОСТИ В ГЛУБОКОВОДНЫХ АКВАТОРИЯХ | 2020 |
|
RU2739136C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПОД ВОДОЙ | 2009 |
|
RU2424542C2 |
| Способ поиска затонувшего радиационного источника автономным необитаемым подводным аппаратом | 2023 |
|
RU2825830C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1990 |
|
RU2013298C1 |
| Буксируемый подводный гамма-зонд | 2021 |
|
RU2760711C1 |
| ТРАНСПОРТНЫЙ ПОРТАЛЬНЫЙ РАДИАЦИОННЫЙ МОНИТОР | 2008 |
|
RU2367977C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| ДИНАМИЧЕСКИ УПРАВЛЯЕМЫЕ КРЫЛЬЕВЫЕ СИСТЕМЫ И СПОСОБЫ | 2016 |
|
RU2729696C2 |




Изобретение относится к средствам обнаружения подводных радиоактивных объектов, находящихся на больших площадях дна или погруженных в него. Технический результат - максимально сплошной охват зоной чувствительности контролируемого дна, точное следование рельефу поверхности, создание устройства для такого способа. Составной детектор монтируют на среднем участке троса. Свободные концы троса закрепляют на лебедках двух плавательных средств. Трос разворачивают и опускают на дно таким образом, чтобы детектор образовал сплошную зону чувствительности. Двигают плавательные средства параллельными курсами, стравливая лебедками свободные концы троса. Останавливают и фиксируют плавательные средства. Синхронно наматывают лебедками свободные концы троса, которые буксируют детектор по дну. Поддерживают постоянное расстояние от детектора до дна. Выявляют места отклонения от этой постоянной. При срабатывании детектора прекращают буксирование и выявляют место нахождения радиоактивного объекта по расположению сработавшей составной части детектора. 2 н. и 13 з.п. ф-лы, 6 ил.
1. Способ поиска радиоактивных объектов под водой, включающий прикрепление детектора к тросу, прикрепление конца троса к плавательному средству, буксирование детектора за трос в толще воды на определенной глубине по заданной траектории движения, срабатывание детектора при обнаружении радиоактивного объекта, анализ выходных сигналов детектора на превышение допустимого значения радиации, отличающийся тем, что детектор выполняют состоящим из звеньев, монтируют на среднем участке троса, свободные концы которого закрепляют на лебедках двух плавательных средств, трос разворачивают и опускают на дно таким образом, чтобы детектор образовал сплошную зону чувствительности, двигают плавательные средства параллельными курсами, стравливая лебедками свободные концы троса, останавливают и фиксируют плавательные средства, синхронно наматывают свободные концы троса лебедками, тем самым буксируют детектор по дну, поддерживают постоянное расстояние от детектора до дна, выявляют места отклонения от этой постоянной величины, при срабатывании детектора прекращают буксирование детектора и выявляют место нахождения радиоактивного объекта по расположению сработавшей составной части детектора.
2. Способ поиска по п.1, отличающийся тем, что, выявляя место нахождения радиоактивного объекта, локализуют площадку дна, находящуюся под одним или несколькими звеньями детектора, передавшими сигнал о срабатывании.
3. Способ по п.1, отличающийся тем, что расстояние от детектора до дна поддерживают меньше величины радиуса области чувствительности детектора, а расстояние между звеньями детектора поддерживают из условия формирования непрерывной зоны чувствительности вдоль всей длины детектора.
4. Способ по п.1, отличающийся тем, что в качестве контролируемого параметра радиоактивного излучения выявляют гамма-излучение.
5. Способ по п.1, отличающийся тем, что формируют характерный световой сигнал от звена детектора, зафиксировавшего гамма-излучение.
6. Способ по п.1, отличающийся тем, что формируют ультразвуковой сигнал от звена детектора, зафиксировавшего гамма-излучение.
7. Способ по п.1, отличающийся тем, что под детектором организуют подсветку и видеонаблюдение дна.
8. Комплекс для поиска радиоактивных объектов под водой, содержащий подводный детектор радиоактивного излучения, закрепленный на устройстве погружения и удержания его на заданной глубине, буксирующее устройство, источники питания, контроля и обработки выходного сигнала детектора, отличающийся тем, что дополнительно введены ограничители расстояния от детектора до дна, буксирующее устройство выполнено в виде двух плавательных средств, снабженных лебедками, детектор выполнен составным из N последовательно соединенных звеньев, между которыми закреплены ограничители расстояния, а устройство погружения и удержания выполнено в виде буксирно-кабельного троса, свободные концы которого закреплены на лебедках.
9. Комплекс по п.8, отличающийся тем, что число звеньев N выбирают из условия N=L/l, в котором L - длина детектора, а l - длина проекции на трос области чувствительности одного звена.
10. Комплекс по п.8, отличающийся тем, что подводный детектор радиоактивного излучения выполнен в виде продолговатых трубчатых контейнеров со сцинтилляционным материалом, по меньшей мере, в одном из торцов каждого трубчатого контейнера размещен фотоэлектронный умножитель, выход которого соединен с собственным блоком обработки выходного сигнала.
11. Комплекс по п.9, отличающийся тем, что ограничители расстояния от детектора до дна выполнены в виде колес с радиусом, не превышающим величину радиуса зоны чувствительности детектора, при этом буксирно-кабельный трос пропущен через отверстия в ступицах колес и через трубчатые контейнеры подводного детектора.
12. Комплекс по п.9, отличающийся тем, что каждое звено детектора снабжено световым маяком, подключенным к выходам соответствующих блоков обработки выходного сигнала фотоэлектронных умножителей.
13. Комплекс по п.9, отличающийся тем, что каждое звено детектора снабжено ультразвуковым излучателем, подключенным к выходам соответствующих блоков обработки выходного сигнала фотоэлектронных умножителей.
14. Комплекс по п.9, отличающийся тем, что каждое звено детектора снабжено системой видеонаблюдения дна с видеовыходом на блок управления комплексом, находящийся на борту какого-либо плавательного средства.
15. Комплекс по п.9, отличающийся тем, что внутренние узлы контейнера помещены в наполнитель.
| RU 2059264 C1, 27.04.1996 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ НА МОРСКОМ РУБЕЖЕ В МЕЛКОМ МОРЕ | 1999 |
|
RU2161319C1 |
| JP 2008049942 A, 06.03.2008 | |||
| US 4072941 A, 07.02.1978. | |||

