Изобретение относится к сельскому хозяйству, в частности, к роботизированным устройствам для внесения гербицидов в приствольные полосы сада интенсивного типа.
Известно устройство для обработки гербицидами приствольных полос многолетних насаждений, содержащее резервуар для рабочих растворов гербицидов, насос, технологическую трубопроводную и запорную арматуру, симметрично расположенные относительно его продольной оси подвижные четырехзвенные кронштейны параллелограммного типа, одна сторона которых неподвижна и является частью центральной рамы устройства, а на других сторонах закреплены штанги с распылителями для диспергирования рабочих жидкостей гербицидов, перед которыми в направлении движения агрегата установлены копиры для обхода штамба дерева, при этом четырехзвенные параллелограммные кронштейны совместно с возвратным и амортизирующими пружинами выполняют функцию демпфера. При движении агрегата каждая штанга с распылителями и копирами находится в приствольной полосе своего ряда и при встрече копира со штамбом дерева штанга выдвигается из ряда, не прекращая процесс опрыскивания гербицидами приствольной полосы.
После завершения контакта копира со штамбом дерева четырехзвенный кронштейн и штанга с распылителями возвращаются в исходное положение. (Авторское свидетельство SU № 1025388 А, Кл. А01М 7/00).
Недостатком такого устройства является ручная настройка копиров на заданную ширину междурядья, недостаточная точность вождения агрегата, неудовлетворительное качество обработки гербицидами приствольных полос вследствие изменения общей рабочей ширины захвата устройства при обходе штамба и низкая производительность выполнения технологического процесса внесения гербицидов в садах.
Известно устройство для внесения растворов гербицидов в приствольную полосу сада, содержащее несущую раму, связанные с ней посредством подпружиненных параллелограммных механизмов боковые штанги, оснащенные распылителями и снабженные на концах копирами длиной, равной расстоянию между деревьями в ряду, ориентированными вдоль направления движения и закрепленными к штанге средней частью, при этом устройство снабжено шарнирно закрепленным на продольной тяге одного параллелограммного механизма гидроцилиндром, на штоке которого жестко закреплена кулиса, соединенная посредством пальца с продольной тягой второго параллелограммного механизма боковых штанг.
При движении агрегата каждая штанга находится в приствольной полосе своего ряда, копиры поджаты к штамбам деревьев, распылители разбрызгивают раствор гербицида на почву (Патент RU № 2350065 С1. Кл. А01С 23/02).
Штамбы плодовых деревьев располагаются на полосе, шириной примерно ±0,26 м, а отклонения штамбов деревьев от осевой ширины ряда при механизированной посадке сада может достигать 0,18…0,22 м. (см. Манаенков К.А. Защитная зона рядов яблонь при обработке почвы в интенсивных садах // Садоводство и виноградарство. 2000. № 3. С. 7-8).
Кроме того, схема посадки плодовых деревьев в интенсивном саду предполагает в зависимости от вида, сорта, подвоя разные расстояния не только между рядами деревьев, но и между деревьями в ряду с определенными отклонениями от номинального значения.
Данное устройство, основанное на внесении гербицидов при копировании штамбов плодовых деревьев, имеет следующие недостатки:
- наличие отклонений штамбов деревьев от номинального значения в полосе ряда в продольном и поперечном направлениях вызывает смещение копира от осевой линии ряда деревьев, соответственно смещение штанги с распылителями от обрабатываемой приствольной полосы, что в поперечном направлении приводит к неравномерному распределению гербицидов, излишнему их перерасходу, при этом гербицидами обрабатывается только половина приствольной полосы в каждом ряду деревьев, а это значительно снижает эксплуатационную производительность агрегата, повышает прямые затраты энергии топлива.
Технической задачей изобретения является создание роботизированного устройства для внесения гербицидов в приствольную полосу садовых насаждений, обеспечивающее повышение качества обработки приствольных полос гербицидами, увеличение производительности выполнения технологического процесса, снижение затрат энергии топлива.
Поставленная техническая задача достигается тем, что роботизированное устройство для внесения гербицидов в приствольные полосы сада содержит: установленные на энергетическом средстве бортовой компьютер, приемник навигационных сигналов, блок управления рабочими органами устройства, гидравлический модуль с баком для рабочей жидкости гербицида, насосом, миксером, технологической трубопроводной и запорной арматурой, манипулятор с телескопическими электромеханическими цилиндрами и рабочими органами в виде плоской пространственной рамы с ведущими и ведомыми элементами, гидроцилиндрами, коллекторами с распылителями рабочей жидкости гербицида, ультразвуковыми датчиками, блок электрогидравлической аппаратуры с дозаторами рабочей жидкости, электромагнитными гидравлическими клапанами, согласно изобретению устройство выполнено таким образом, что входные отверстия, по крайней мере, каждого из двух электромагнитных клапанов связаны гидролиниями с выходными отверстиями, по крайней мере, одного дозатора, а выходные отверстия, по крайней мере, двух электромагнитных клапанов соединены гидролиниями с внутренними коллекторами, а четырех электромагнитных клапанов с подвижными блоками: при этом внешние коллекторы в свою очередь подключены к неподвижным блокам, а на фронтальных ведущих и ведомых элементах рамы каждого рабочего органа расположены подвижные штанги, каждая из которых соединена одним концом - со штоком гидроцилиндра, другим концом с корпусами подвижных блоков соответственно, образующими при сопряжении с неподвижными блоками самозапирающееся и самосоединяющееся вал-втулочное жесткое неподвижное соединение двух частей, по крайней мере, одной из фронтальных элементов рам рабочих органов, при этом расстояние между осями ведущих и ведомых элементов фронтальных сторон рамы каждого рабочего органа составляет не менее трех наибольших диаметров штамбов деревьев в приствольных полосах, а под каждым фронтальным ведущим и ведомым элементом рамы каждого рабочего органа установлены захватно-копировальные дефлекторы, оси которых совпадают с осями ряда деревьев, и содержат по два симметричных элемента, концы которых соединены пружинами с фронтальными элементами рамы рабочих органов, причем в проекции сечения захватно-копировальных дефлекторов на горизонтальную плоскость они имеют коноидальный профиль, ориентированный диффузорной частью в направлении движения устройства, причем наименьший линейный размер входной части каждого коноидального профиля больше суммы наибольшего предельного диаметра штамба дерева, наибольшего предельного размера отклонений центров штамбов деревьев в ряду и величины наибольшего допустимого предельного отклонения оси симметрии энергетического средства с роботизированным устройством от оси симметрии междурядья сада.
Устройство поясняется чертежами.
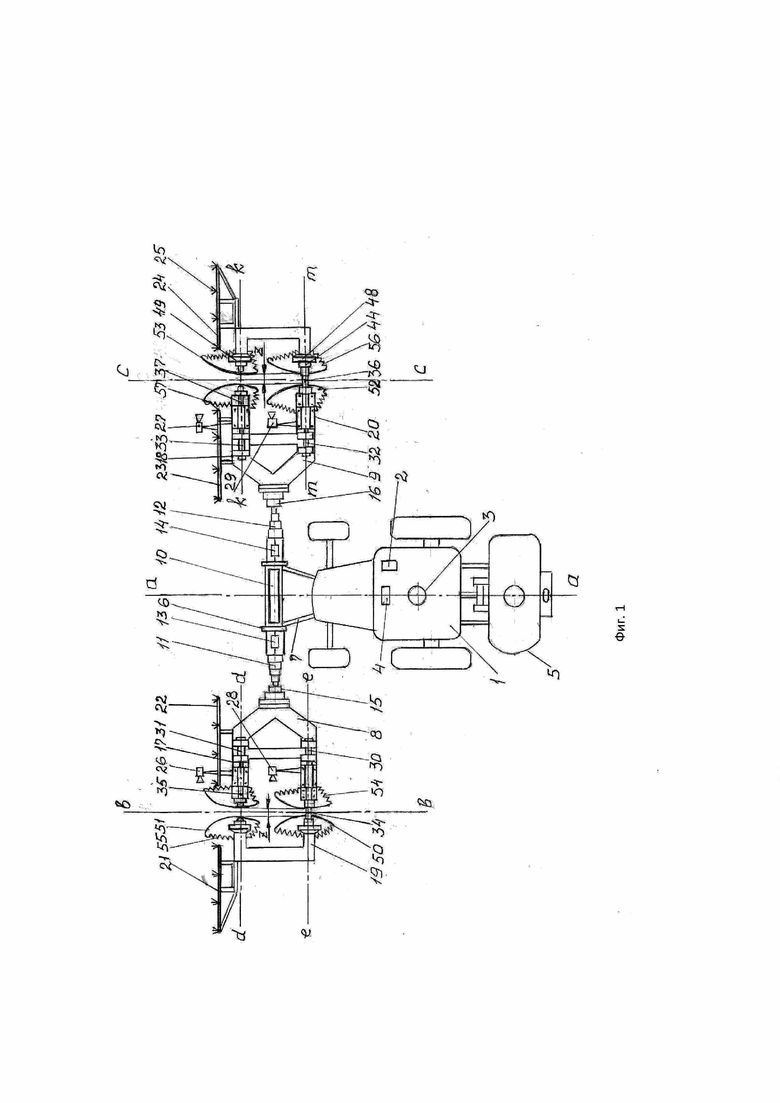
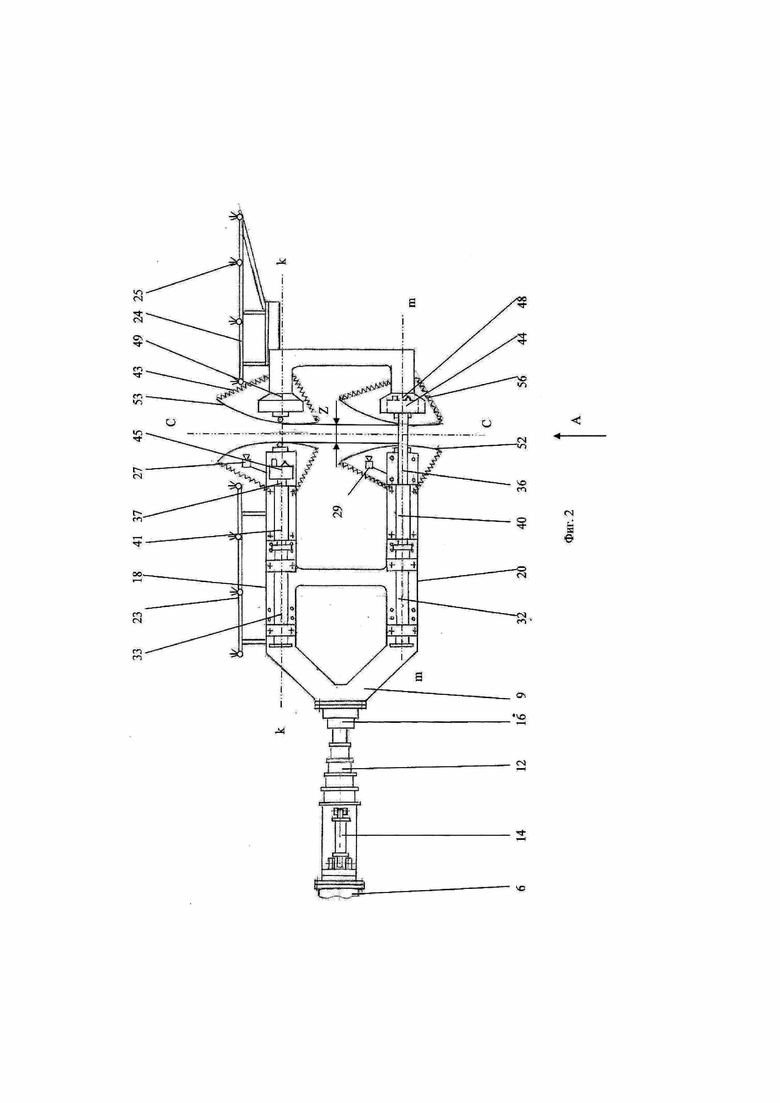
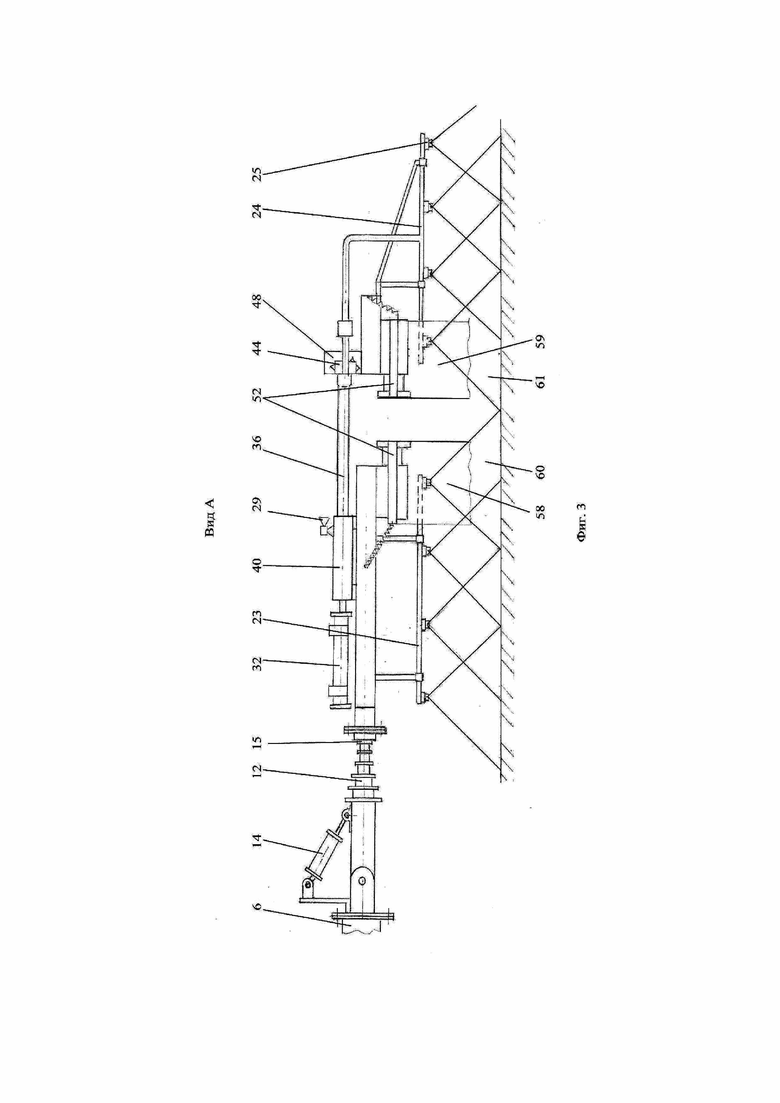
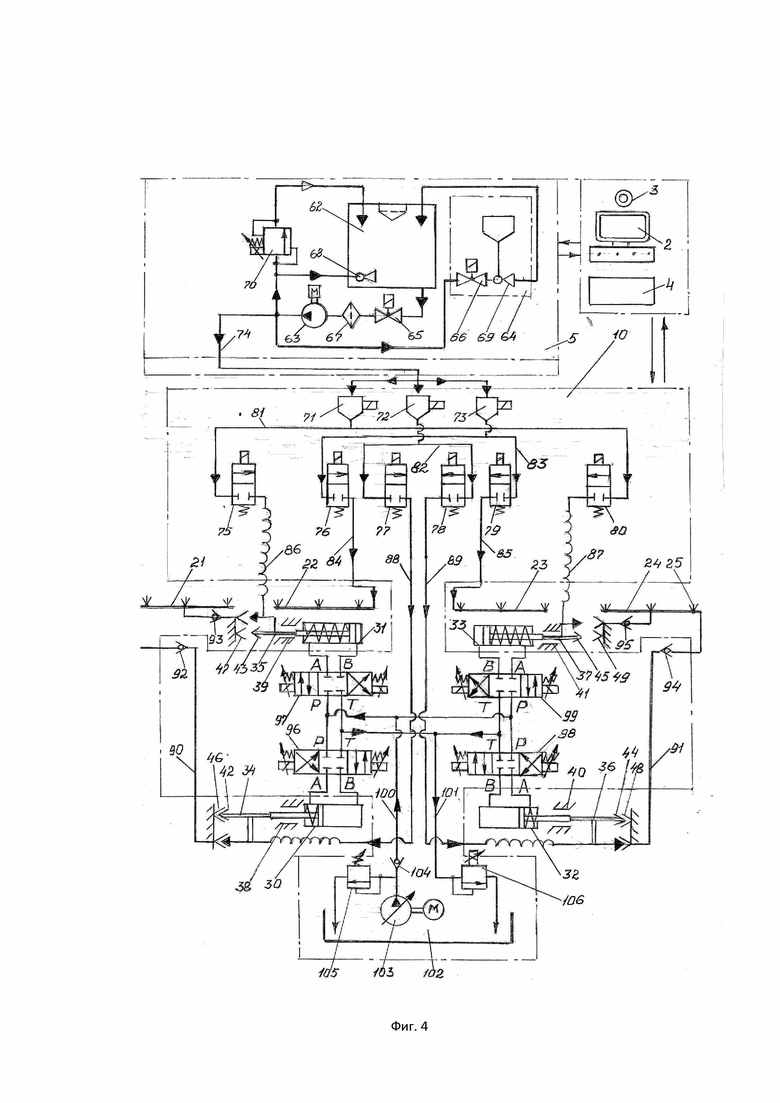
На фиг. 1 изображено устройство, вид сверху; на фиг. 2 изображен рабочий орган, вид сверху; на фиг. 3 - то же, вид А; на фиг. 4 изображена принципиальная комбинированная схема устройства; на фиг. 5 изображена схема обработки гербицидами приствольных полос в междурядьях сада, вид сверху.
Роботизированное устройство для обработки гербицидами приствольных полос в садах содержит: установленные на энергетическом средстве 1 бортовой компьютер 2, приемник 3 навигационных сигналов GPS/ГЛОНАСС, блок 4 управления устройством, гидравлический модуль 5, навешиваемый сзади энергетического средства 1, манипулятор 6 с центральной рамой, выполняющей роль опорной конструкции, фронтально установленный на энергетическом средстве 1 с помощью регулируемого по высоте навесного устройства 7 симметрично относительно продольной оси а-а роботизированного устройства, рабочие органы 8 и 9, закрепленные на концах манипулятора 6, блок электрогидравлической аппаратуры 10, установленный на центральной раме манипулятора 6. Бортовой компьютер связан интерфейсами (не показано) с блоками 4 и 10. Центральная рама манипулятора 6 и рабочие органы 8 и 9 соединены между собой с электромеханическими телескопическими цилиндрами 11 и 12 двустороннего действия с регулируемым ходом, снабженными винтовой передачей, приводными серводвигателями с разъемами для питания и подключения шины управления (не показано), главные секции которых шарнирно соединены с гидроцилиндрами 13 и 14 подъема и опускания рабочих органов 8 и 9, а конечные секции соединены с демпфирующими устройствами 15 и 16 для гашения динамических нагрузок на цилиндры 11 и 12, рабочих органов 8 и 9.
Телескопическое сочленение центральной рамы манипулятора 6 с рабочими органами 8 и 9 обеспечивает компактность устройства в собранном положении, способность удлиняться на заданное расстояние в рабочем состоянии и складываться в транспортном положении.
Рабочие органы 8 и 9 расположены симметрично относительно продольной оси а-а энергетического средства 1 с роботизированным устройством, имеют одинаковую конструкцию, при этом работа одного рабочего органа не зависима от действия другого рабочего органа. Каждый рабочий орган 8 и 9 выполнен в виде плоской пространственной рамы, имеющей ведущие 17,18 и ведомые 19,20 фронтальные элементы горизонтальных сторон, снабженные механизмами замыкания и размыкания ведущих и ведомых сторон 17,18,19,20. При этом расстояние между осями ведущих d-d, k-k и ведомых e-e, m-m элементов сторон рамы каждого рабочего органа составляет не менее трех наибольших возможных диаметров штамбов деревьев в приствольных полосах сада.
На ведущей стороне рамы каждого рабочего органа 8 и 9 смонтированы распределительные гидравлические внешние коллекторы 21,22 и внутренние коллекторы 23,24, на которых установлены с определенным шагом, обеспечивающим заданное перекрытие факелов распыла, распылители 25 рабочей жидкости гербицида.
На каждом рабочем органе 8 и 9 установлены ультразвуковые передние датчики 26,27 и задние датчики 28,29, которые измеряют расстояние от осей d-d, k-k и e-e, m-m фронтальных сторон 17, 18 и 19, 20 рабочих органов 8 и 9 до штамбов деревьев.
На раме каждого рабочего органа 8 и 9 закреплены гидроцилиндры 30,31,32,33 двухстороннего действия с односторонними штоками с подпружиненными поршнями с возможностью торможения в конце хода при выдвижении штока. Штоки гидроцилиндров 30,31,32,33 соединены с подвижными штангами 34,35,36,37, которые входят в направляющие опоры 38,39,40,41 соответственно, жестко закрепленные на каждой раме каждого рабочего органа 8 и 9 для устранения возможных радиальных нагрузок на штанги 34,35,36,37. На торцевые части штанг 34,35,36,37 насажены корпуса подвижных блоков 42,43,44,45, образующих при сопряжении с неподвижными блоками 46,47,48,49 жесткое крепление с крайней частью рамы каждого рабочего органа 8 и 9 за счет быстродействующего самозапирающегося и самосоединяющегося вал-втулочного соединения (не показано).
В корпуса подвижных блоков 42,43,44,45 и неподвижных блоков 46,47,48,49 вмонтированы полумуфты, снабженные каналами подвода рабочей жидкости и устройствами фиксации полумуфт (не показано), при этом в положении замыкания полумуфты образуют быстродействующее гидравлическое соединение. Подвижные блоки 42,43,44,45 и неподвижные блоки 46,47,48,49 в нерабочем состоянии замкнуты благодаря подпружиненным поршням гидроцилиндров 30,31,32,33.
На каждом рабочем органе 8 и 9 симметрично относительно осей в-в и с-с установлены захватно-копировальные дефлекторы 50,51,52,53, закрепленные на вертикальных осях, содержащие по два симметричных элемента с пружинами растяжения 54,55,56,57, которые обеспечивают стабилизацию устойчивого положения захватно-копироватльных дефлекторов 50,51,52,53 и смягчение действия ударных нагрузок на рабочие органы 8 и 9. Пружины 54,55,56,57 своими зацепами крепятся одним концом к вогнутой стороне захватно-копировальных дефлекторов 50,51,52,53, а другим концом - к раме каждого рабочего органа 8 и 9. Захватно-копировальные дефлекторы 50,51,52,53 в проекции сечения на горизонтальную плоскость имеют коноидальный профиль, что позволяет минимизировать коэффициент трения и ударные нагрузки при входе штамба дерева в захватно-копировальные дефлекторы 50,51,52,53, а наименьший линейный размер z входной части каждого коноидального профиля больше суммы наибольшего предельного диаметра Dmax штамба дерева, наибольшего предельного размера отклонений 
К передним захватно-копировальным дефлекторам по их периметру прикреплены защитные экраны 58,59 из эластичного материала для избежания попаданий капель рабочей жидкости гербицида 60,61 на штамб дерева.
Гидравлический модуль 5 имеет бак 62 для рабочей жидкости, насос с электроприводом 63, миксер 64 для приготовления рабочей жидкости гербицида, технологическую и запорную трубопроводную арматуру, включающую электромагнитные запорные клапаны 65,66, фильтр 67, эжекторы 68,69, напорный переливной клапан 70.
Блок электрогидравлической аппаратуры 10 включает: дозаторы рабочей жидкости гербицида 71,72,73 с электромагнитным управлением, соединенные на входе гидролинией 74 с насосом 63; ряд электромагнитных нормально закрытых гидравлических клапанов 75,76,77,78,79,80, при этом входные отверстия клапанов, по крайней мере, каждого из двух из ряда клапанов 75,76,77,78,79,80 связаны гидролиниями 81,82,83 с выходными отверстиями одного из дозаторов 71,72,73 соответственно.
Выходные отверстия клапанов 76,79 соединены гидролиниями 84,85 с внутриннеми коллекторами 22,23 соответственно, выходные отверстия клапанов 75,80 связаны гидролиниями 86,87 с каналами подвода рабочей жидкости полумуфт подвижных блоков 43,45. Выходные отверстия клапанов 77,78 гидролиниями 88,89 соединены с каналами полумуфт подвижных блоков 42,44, а полумуфты неподвижных блоков 46,47,48,49 соединены гидролиниями 90,91 через обратные клапаны 92,93,94,95 с гидравлическими коллекторами 21,24 соответственно; гидрораспределители с пропорциональным электромагнитным управлением 96,97,98,99, имеющие Р - входное отверстие основного потока масла из напорной линии 100, А, В – отверстия, присоединенные к штоковой и поршневой камерам гидроцилиндров 30,31,32,33; Т - выходное отверстие основного потока масла, возвращаемого по сливной линии 101 в бак 102; масляный насос 103; обратный клапан 104; предохранительный клапан 105, регулятор потока с электромагнитным управление 106.
Такая конструкция роботизированного устройства обеспечивает целостность конструкции рабочих органов при прохождении через них штамбов деревьев и непрерывный процесс подачи к коллекторам рабочей жидкости и обработки приствольных полос гербицидами.
Роботизированное устройство для внесения гербицидов в приствольные полосы сада в режиме реального времени работает следующим образом.
Перед началом работы устройства в бортовой компьютер 2 в виде электронной цифровой карты обработки гербицидами приствольных полос 107 и 108 в саду вводится следующая информация: географические координаты и площадь обрабатываемого сада; начальные и конечные координаты, длина L1, L2, L3,… Ln, ширина В1 каждого междурядья участка сада обрабатываемого за один проход, координаты центра штамба 109 каждого дерева 110 в рядах n1- n1, n2 -n2, расстояние между смежными деревьями в каждом ряду z1, z2, z3,… zn, расстоянии между осями рядов деревьев 


Бак 62 гидравлического модуля 5, энергетического средства 1 заполняется технической водой, в миксер 64 загружается заданное количество концентрата гербицида в соответствии с картой-заданием, и миксер заполняется до определенного объема водой. От компьютера 2 передаются управляющие сигналы на привод насоса 63 и открытие клапанов 65 и 66, включается насос 63, открываются клапаны 65 и 66, вода через фильтр 67, эжектор 69 миксера 64 рециркулирует в бак 62, эжектируя из бака миксера 64 гербицид, при этом в баке 62 образуется рабочая жидкость гербицида с заданной концентрацией компонентов действующего вещества.
Энергетическое средство 1 с роботизированным устройством ставится на обрабатываемом участке сада в точке начала работы. Посредством приемника навигационных сигналов 3 и бортового компьютера 2 определяются, сравниваются с заданными и корректируются начальные координаты стартовой точки. От компьютера 2 передается управляющий сигнал на привод насоса 63, открывается клапан 70 и клапаны 75,76,77,78,79,80 блока 10.
Рабочая жидкость гербицида из бака 62 через открытый клапан 65, фильтр 67 по гидролинии 74 подается к дозаторам потока 71,72,73, при этом часть рабочей жидкости через клапан 70 байпасируется в бак 62, посредством эжектора 68 перемешивается. Дозаторы 71,72,73 автоматически открываются и выдают заданное количество рабочей жидкости в виде постоянного расхода в установленный промежуток времени. От дозатора 71 по гидролинии 81 через открытые клапаны 76 и 79 рабочая жидкость по гидролиниям 84 и 85 поступает к коллекторам 22 и 23 рабочих органов 8 и 9. От дозаторов 72 и 73 по гидролиниям 82 и 83 рабочая жидкость поступает в клапаны 75,80 и 77,78, из которых по гидролиниям 86,87 и 88,89 поступает в каналы подвода рабочей жидкости полумуфт подвижных блоков 42,43,44,45.
Посредством насоса 103 рабочая жидкость – масло из гидроблока 102 под заданным давлением, установленным предохранительным клапаном 105 поступает через обратный клапан 104 к гидрораспределителям 96,97,98,99 с электрогидравлическим пропорциональным управлением от электронных драйверов (не показано), регулирующих электрический ток на электромагнитах гидрораспределителей 96,97,98,99 в соответствии с опорными сигналами, поступающими от компьютера 2 и согласованных с цифровой электронной картой маршрута движения энергетического средства 1 с манипулятором 6.
В момент начала и в процессе движения энергетическое средство 1 с манипулятором 6 посредством GPS/ГЛОНАСС приемника 3 принимает сигналы спутниковой навигационной системы и определяет текущие координаты положения энергетического средства 1 с манипулятором 6 и передает текущую информацию в бортовой компьютер 2.
Ультразвуковые датчики 26,27,28,29 измеряют скорость возврата ультразвуковой волны от штамбов деревьев при приближении к ним рабочих органов 8 и 9 манипулятора 6. Компьютер 2 по скорости возврата ультразвуковой волны вычисляет расстояние до штамбов деревьев. При подходе рабочих органов 8 и 9 к штамбам деревьев и нахождении штамбов в зоне действия датчиков 27,29 передних захватно-копировальных дефлекторов 51,53, на электромагнитные распределители 96,97,98,99 подаются электрические управляющие сигналы.
При подаче управляющего сигнала на левый электромагнит распределителя 97 и на правый электромагнит распределителя 99 их золотники перемещаются соответственно вправо и влево (не показано). Масло, подаваемое насосом 103, поступает из гидролиний 100 в входные отверстия Р распределителей 97, 99 и через выходные отверстия А в штоковые полости гидроцилиндров 31 и 33 поршни гидроцилиндров 31 и 33 со штоками смещаются соответственно вправо и влево, пружины поршней растягиваются, подвижные блоки 43 и 45 смещаются вправо и влево соответственно, фронтальные стороны 17,18 рам рабочих органов 8 и 9 размыкаются, образуя открытые участки перед захватно-копировальными дефлекторами 51,53, в которые входят штамбы деревьев.
Рабочая жидкость гербицида через гидравлические соединения подвижных 42,44 и неподвижных 46,48 блоков поступает по гидролиниям 90,91 через обратные клапаны 92,94 к коллекторам 21,23 и далее из коллекторов 21,22,23,24 рабочая жидкость гербицида диспергируется распылителями 25 в приствольные полосы 107 и 108 деревьев 110 сада. При прохождении захватно-копировальными дефлеторами 51 и 53 штамбов деревьев, штамбы выходят из зоны действия датчиков 26 и 27. Управляющие сигналы от компьютера 2 подаются на правый и левый электромагниты гидрораспределителей 97 и 99, золотники которых смещаются соответственно влево и вправо (не показано). Масло, нагнетаемое насосом 103, поступает через отверстие B в поршневые полости гидроцилиндров 31,33, а из штоковой полости гидроцилиндров 31 и 33 масло через отверстие Т гидрораспределителей 97 и 99 по гидролинии 101 поступает в регулятор потока 106 и далее сливается в бак 103. Поршни гидроцилиндров 31 и 33 смещаются соответственно влево и вправо. Подвижные штанги 35 и 37 смещаются влево и вправо, корпуса подвижных блоков 43 и 45 входят в корпуса неподвижных блоков 47 и 49, образуя жесткое самозапирающееся и сомосоединяющееся вал-втулочное крепление с гидравлическим соединением для подачи рабочей жидкости гербицида к коллекторам 21 и 24. При нахождении штамбов 103 деревьев в зоне действия датчиков 28 и 29 компьютер 2 передает управляющие сигналы на правый и левый электромагниты гидрораспределителей 96 и 98. Их золотники смещающихся соответственно влево и вправо, открываются отверстия Р, и масло через отверстие А поступает в штоковые камеры гидроцилиндров 30 и 32. Штанги 34 и 36 вместе со штоками гидроцилиндров смещаются вправо и влево соответственно, отключается подача рабочей жидкости к коллекторам 21 и 24 по гидролиниям 90 и 91, но имеет место подача рабочей жидкости гербицида по гидролиниям 86 и 87, захватно-копировальные устройства 50 и 52 пропускают штамбы деревьев 110 через открытые ведомые 19,20 фронтальные стороны рабочих органов 8 и 9. При выходе штамбов деревьев из зоны действия датчиков 28 и 29 по сигналу от компьютера 2. срабатывают гидроцилиндры 96,99, штанги 34 и 36 гидроцилиндров 30,32 сдвигаются влево и вправо соответственно и образуют жесткое соединение с крайними частями рам рабочих органов 8 и 9. Далее, при подходе к очередным штамбам деревьев цикл размыкания и замыкания ведущих и ведомых сторон пространственных рам рабочих органов повторяется с непрерывным внесением рабочей жидкости гербицида в приствольные полосы сада.
Данное устройство обеспечивает повышение качества обработки приствольных полос гербицидами, увеличение производительности выполнения технологического процесса и снижения затрат энергии топлива не мене, чем в два раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот-опрыскиватель для садоводства | 2022 |
|
RU2790688C1 |
| Устройство для внесения гербицидов в приствольную зону плодового сада | 2016 |
|
RU2636400C1 |
| Машина для дифференцированного внесения пестицидов, жидких минеральных удобрений и других агрохимикатов | 2020 |
|
RU2748996C1 |
| Мобильный робот для контактного нанесения пестицидов | 2023 |
|
RU2797047C1 |
| УСТРОЙСТВО ДЛЯ ГЕРБИЦИДНОЙ ОБРАБОТКИ ПРИСТВОЛЬНЫХ ПОЛОС МНОГОЛЕТНИХ НАСАЖДЕНИЙ | 2018 |
|
RU2694569C1 |
| УСТРОЙСТВО ДЛЯ ВНЕСЕНИЯ РАСТВОРОВ ГЕРБИЦИДОВ В ПРИСТВОЛЬНУЮ ПОЛОСУ САДА | 2007 |
|
RU2350065C1 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |
| Устройство для внутрипочвенного дифференцированного внесения жидких минеральных удобрений и пестицидов | 2021 |
|
RU2770488C1 |
| УСТРОЙСТВО ДЛЯ ХИМИЧЕСКОЙ ОБРАБОТКИ ПРИСТВОЛЬНЫХ ПОЛОС МНОГОЛЕТНИХ НАСАЖДЕНИЙ | 2023 |
|
RU2824205C1 |
| УСТРОЙСТВО ДЛЯ ВНЕСЕНИЯ РАСТВОРОВ ГЕРБИЦИДОВ В ПРИСТВОЛЬНУЮ ПОЛОСУ САДА | 2004 |
|
RU2282990C2 |
Изобретение относится к сельскому хозяйству, в частности к роботизированным устройствам для внесения гербицидов в приствольные полосы сада интенсивного типа. Отличительной особенностью решения является то, что входные отверстия, по крайней мере, каждого из двух электромагнитных клапанов 75 и 80, 77 и 78, 76 и 79 связаны гидролиниями с выходными отверстиями, по крайней мере, одного дозатора 71, 72, 73, а выходные отверстия, по крайней мере, двух электромагнитных клапанов 76, 79 и четырех электромагнитных клапанов 75, 80 и 77, 78 соединены гидролиниями с внутренними коллекторами 22, 23, подвижными блоками 42, 43, при этом внешние коллекторы, в свою очередь, подключены к неподвижным блокам 46, 47, 48, 49, а на фронтальных ведущих 17, 18 и ведомых 19, 20 элементах рамы каждого рабочего органа 8 и 9 расположены подвижные штанги 34, 35, 36, 37, каждая из которых соединена одним концом со штоком гидроцилиндра 30, 31, 32, 33, другим концом - с корпусами подвижных блоков 42, 43, 44, 45 соответственно, образующими при сопряжении с неподвижными блоками 46, 47, 48, 49 самозапирающееся и самосоединяющееся вал-втулочное жесткое неподвижное соединение двух частей, по крайней мере, одной из фронтальных элементов 17, 18, 19, 20 рам рабочих органов, при этом расстояние между осями ведущих 17, 18 и ведомых элементов 19, 20 фронтальных сторон рамы каждого рабочего органа составляет не менее трех наибольших диаметров штамбов деревьев в приствольных полосах, а под каждым фронтальным ведущим и ведомым элементом рамы каждого рабочего органа установлены захватно-копировальные дефлекторы 50, 51, 52, 53, оси которых совпадают с осями ряда деревьев, и содержат по два симметричных элемента, концы которых соединены пружинами с фронтальными элементами рамы рабочих органов 8 и 9, причем в проекции сечения захватно-копировальных дефлекторов 50, 51, 52, 53 на горизонтальную плоскость они имеют коноидальный профиль, ориентированный диффузорной частью в направлении движения устройства, причем наименьший линейный размер z входной части каждого коноидального профиля больше суммы наибольшего предельного диаметра штамба дерева, наибольшего предельного размера отклонений центров штамбов деревьев в ряду и величины наибольшего допустимого предельного отклонения оси симметрии энергетического средства 1 с роботизированным устройством от оси симметрии междурядья сада. Технический результат - создание роботизированного устройства для внесения гербицидов в приствольную полосу садовых насаждений, обеспечивающее повышение качества обработки приствольных полос гербицидами, увеличение производительности выполнения технологического процесса. 5 ил.
Роботизированное устройство для внесения гербицидов в приствольные полосы сада, содержащее установленные на энергетическом средстве бортовой компьютер, приемник навигационных сигналов, блок управления устройством, гидравлический модуль с баком для рабочей жидкости гербицида, насосом, миксером, технологической трубопроводной и запорной арматурой, манипулятор с телескопическими электромеханическими цилиндрами и рабочими органами в виде плоской пространственной рамы с ведущими и ведомыми элементами, гидроцилиндрами, коллекторами с распылителями рабочей жидкости гербицида, ультразвуковыми датчиками, блок электрогидравлической аппаратуры с дозаторами рабочей жидкости, электромагнитными гидравлическими клапанами, отличающееся тем, что входные отверстия, по крайней мере, каждого из двух электромагнитных клапанов связаны гидролиниями с выходными отверстиями, по крайней мере, одного дозатора, а выходные отверстия, по крайней мере, двух электромагнитных клапанов соединены гидролиниями с внутренними коллекторами, а четырех электромагнитных клапанов - с подвижными блоками, при этом внешние коллекторы, в свою очередь, подключены к неподвижным блокам, а на фронтальных ведущих и ведомых элементах рамы каждого рабочего органа расположены подвижные штанги, каждая из которых соединена одним концом со штоком гидроцилиндра, другим концом - с корпусами подвижных блоков соответственно, образующими при сопряжении с неподвижными блоками самозапирающееся и самосоединяющееся вал-втулочное жесткое неподвижное соединение двух частей, по крайней мере, одной из фронтальных элементов рам рабочих органов, при этом расстояние между осями ведущих и ведомых элементов фронтальных сторон рамы каждого рабочего органа составляет не менее трех наибольших диаметров штамбов деревьев в приствольных полосах, а под каждым фронтальным ведущим и ведомым элементом рамы каждого рабочего органа установлены захватно-копировальные дефлекторы, оси которых совпадают с осями ряда деревьев, и содержат по два симметричных элемента, концы которых соединены пружинами с фронтальными элементами рамы рабочих органов, причем в проекции сечения захватно-копировальных дефлекторов на горизонтальную плоскость они имеют коноидальный профиль, ориентированный диффузорной частью в направлении движения устройства, причем наименьший линейный размер входной части каждого коноидального профиля больше суммы наибольшего предельного диаметра штамба дерева, наибольшего предельного размера отклонений центров штамбов деревьев в ряду и величины наибольшего допустимого предельного отклонения оси симметрии энергетического средства с роботизированным устройством от оси симметрии междурядья сада.
| УСТРОЙСТВО ДЛЯ ВНЕСЕНИЯ РАСТВОРОВ ГЕРБИЦИДОВ В ПРИСТВОЛЬНУЮ ПОЛОСУ САДА | 2007 |
|
RU2350065C1 |
| УСТРОЙСТВО ДЛЯ ВНЕСЕНИЯ РАСТВОРОВ ГЕРБИЦИДОВ В ПРИСТВОЛЬНУЮ ПОЛОСУ САДА | 2004 |
|
RU2282990C2 |
| УСТРОЙСТВО ДЛЯ ВНЕСЕНИЯ РАСТВОРОВ ГЕРБИЦИДОВ В ПРИСТВОЛЬНУЮ ПОЛОСУ САДА | 2001 |
|
RU2218763C2 |
| УСТРОЙСТВО ДЛЯ ГЕРБИЦИДНОЙ ОБРАБОТКИ ПРИСТВОЛЬНЫХ ПОЛОС МНОГОЛЕТНИХ НАСАЖДЕНИЙ | 2018 |
|
RU2694569C1 |
| Устройство для внесения гербицидов в приствольную зону плодового сада | 2016 |
|
RU2636400C1 |

