Изобретение относится к области сельского хозяйства, в частности к мобильным сельскохозяйственным роботам-опрыскивателям для обработки плодовых деревьев и ягодных кустарников инсектицидами, фунгицидами и другими средствами для защиты от вредителей и болезней.
Известен опрыскиватель для обработки многорядных высокостебельных культур, содержащий поперечную штангу с вертикальными стойками, укрепленные на них ротационные распылители и подводящие коммуникации (А. С. СССР № 581914, Кл. А 01М 7/00, 1977).
Недостатками известногоустройства являются полидисперсный распыл рабочей жидкости ротационным распылителем, неполная обработка верхней части кроны, ручная настройка штанги на заданную высоту растений и размер кроны, отсутствие рабочих органов для обработки гербицидами приствольных полос, что вызывает снижение эффективности опрыскивания, потери пестицидов при обработке крон растений и, как следствие, загрязнение окружающей среды.
Известен консольный широкозахватный опрыскиватель, содержащий движитель, на остове которого размещена рама с двумя консольно-поворотными штангами, снабженными стойками с распылителями. емкостью с рабочей жидкостью, насосом и системой нагнетающих трубопроводов, улавливателями рабочей жидкости с дренажными трубами, всасывающими трубопроводами и эжекторами ( RU 2467571, МПК А 01М 7/00, 2010).
Недостатками известного опрыскивателя являются ограниченный спектр технологических операций при внесении пестицидов за один проход опрыскивателя, направленный только на внесение средств защиты растений от вредителей и болезней, причем сплошным способом, недостаточная адаптации вертикальных рабочих органов с распылителями к размерам и форме растений, что приводит излишнему расходу пестицидов, и неравномерному распределению рабочей жидкости по вегетативной части растений, снижающем качество обработки.
Известен мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур, содержащий самодвижущееся четырехколесное шасси в виде горизонтальной рамы, заднюю и фронтальную вертикальные прямоугольные рамы с подвижными направляющими, заднюю и фронтальную горизонтальные штанги с механизмами подъема и опускания штанг, систему автономного электропитания в виде блока бортовых аккумуляторных батарей и панель солнечной батареи с множеством объединенных фотоэлементов, выполненную в виде половины поверхности сплюснутого сфероида вращения, систему управления и навигации в виде бортового компьютера, модуль интегрированной навигационной системы, блок управления электроприводами шасси, систему технического зрения, включающую установленные на фронтальной штанге трехмерный сканирующий лазерный оптический дальномер и цифровые оптико-электронные датчики, систему пенообразования и внесения пестицидов, включающую блок автоматического управления подачей, расходом и распределением рабочих растворов пестицидов и сжатого воздуха, связанный интерфейсом с центральным процессором бортового компьютера, гидравлические и пневматические коммуникации, соединенные с модулями пенообразования и внесения пестицидов, ультразвуковые датчики, бак и миксер для рабочих растворов пестицидов, насосный агрегат, источник сжатого воздуха с пневматическим оборудованием, модули пенообразования и внесения пестицидов (RU № 2731082, МПК А 01М 7/00, 2019).
Недостатком известного робота-опрыскивателя являются ограниченные технологические возможности, вследствие обработки пестицидами только низкорастущих пропашные культуры, поскольку его устройство не приспособлено для обработки пестицидами высоких деревьев и кустарников садовых насаждений.
Технической задачей изобретения является расширение технологических возможностей робота-опрыскивателя для садоводства, снижение норм внесения пестицидов, сведение к минимуму потерь пестицидов, уменьшение рисков загрязнения окружающей среды, повышение производительности технологического процесса обработки пестицидами за счет дифференцированной обработки крон садовых насаждений и приствольных полос пестицидами в зависимости от фитосанитарного состояния деревьев и кустарников,.
Поставленная техническая задача достигается тем, что у робота-опрыскивателя для садоводства, содержащего самоходное четырехколесное шасси в виде прямоугольной платформы с передними направляющими и задними ведущими колесами с приводом от электромоторов, систему электропитания, включающую блоки аккумуляторных батарей и панель солнечной батареи, систему управления и навигации, включающую бортовой компьютер, блок управления электроприводами шасси, модуль интегрированной навигационной системы, систему технического зрения в виде лазерного оптического дальномера, цифровых оптико-электронных, спектральных и ультразвуковых датчиков, автоматическую метеорологическую измерительную систему, включающую автоматические метеорологические датчики, систему размещения, подачи и распределения рабочих жидкостей пестицидов, систему диспергирования рабочей жидкости, включающую штанговый модуль, подсоединенные к штанговому модулю модуль обработки инсектицидами и фунгицидами крон деревьев и кустарников и модуль обработки гербицидами приствольных полос гербицидами, согласно изобретению, панель солнечной батареи выполнена в виде половины поверхности эллипсоида вращения с большей осью, параллельной продольной оси симметрии робота-опрыскивателя, каждая из консольно-поворотных горизонтальных ферм штангового модуля соединена с вертикальной подвижной прямоугольной рамой посредством поворотных механизмов с электроприводом и снабжена нижними подвесными горизонтальными направляющими с установленными на каждой направляющей электроприводными механизмами горизонтального перемещения, соединенными по крайней мере с двумя вертикальными стойками, снабженными механизмами вертикального перемещения и, по крайней мере, одной стойкой с вертикальным линейным актуатором, при этом к электроприводным механизмам горизонтального перемещения присоединены коллекторы с блоками электрогидравлических распылителей рабочей жидкости и воздушные рукава с воздушными соплами, причем коллекторы выполнены конгруэнтными, дугообразными, с длиной хорд вертикальных коллекторов, по крайней мере, не менее высоты крон с расстоянием между центрами противоположных дуг не менее диаметра обрабатываемых крон, причем коллекторы закреплены в центре их дуг, и воздушные рукава выполнены в виде части торобразной оболочки эквидистантно дугам коллекторов, а на штоках вертикальных линейных актуаторов закреплены двухсторонние телескопические горизонтальные штанги с электроприводными механизмами выдвижения - складывания секций, каждая из которых снабжена блоком электрогидравлических распылителей, причем все блоки электрогидравлических распылителей соединены линией связи с блоком автоматического управления подачей, расходом и распределением потоков рабочей жидкости.
Изобретение поясняется чертежами.
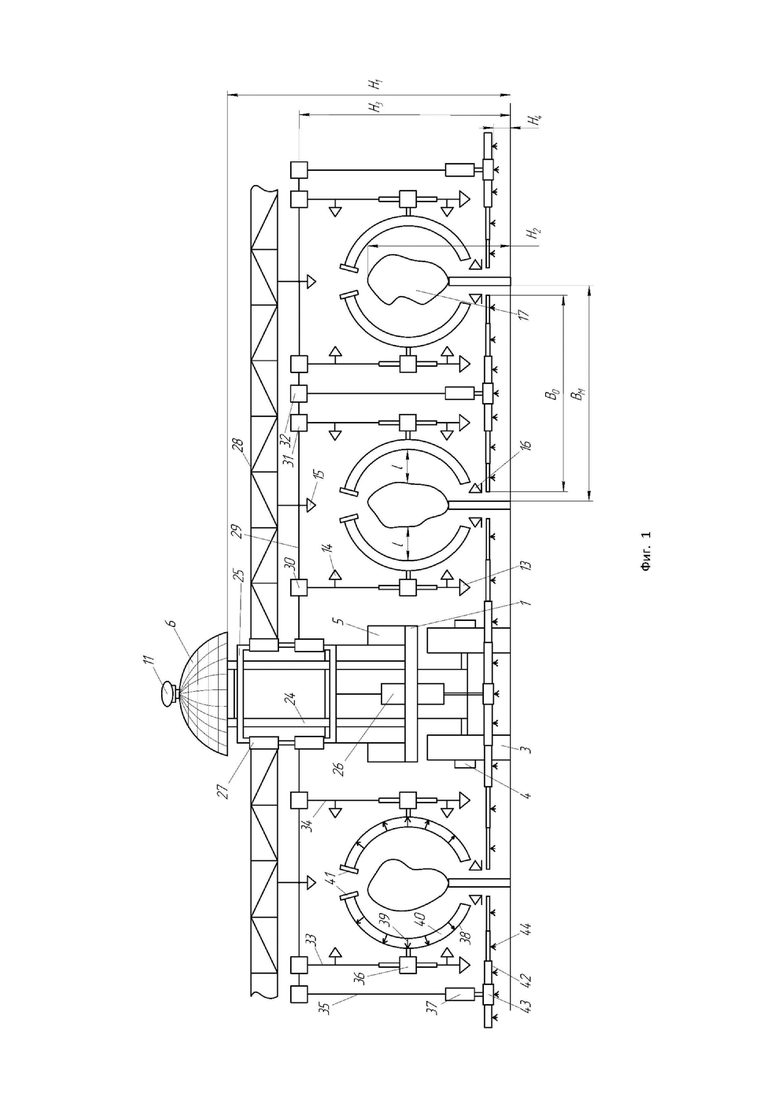
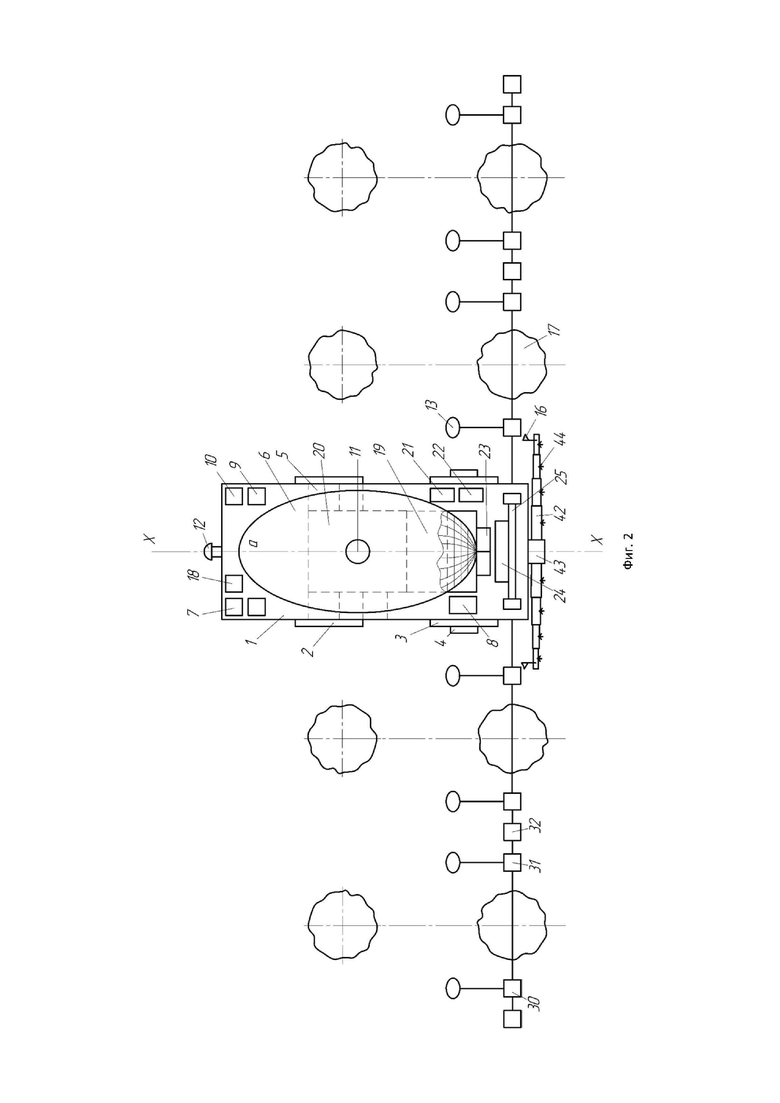
На фиг.1 представлен робот-опрыскиватель для садоводства, вид сзади; на фиг. 2 - то же, вид сверху.
Робот-опрыскиватель для садоводства содержит самоходное четырехколесное шасси, систему электропитания, систему управления и навигации, систему технического зрения, автоматическую метеорологическую измерительную систему, систему размещения, подачи, распределения потоков и диспергирования рабочей жидкости пестицидов.
Самоходное четырехколесное шасси выполнено в виде прямоугольной платформы 1 с передними направляющими колесами 2 и задними ведущими колесами 3 с приводом от электромоторов 4.
Система электропитания содержит установленные на платформе 1 блоки аккумуляторных батарей 5, панель солнечной батареи 6 с множеством фотоэлементов. Форма панели солнечной батареи 6 в виде половины поверхности эллипсоида вращения обусловлена увеличенной площадью поверхности и более эффективным попаданием солнечного излучения на фотоэлементы, независимо от положения и времени естественного освещения работы робота-опрыскивателя. Посредством солнечной батареи 6 происходит подзарядка блока аккумуляторных батарей 5.
Система управления и навигации содержит бортовой компьютер 7 и соединенные линиями связи с ним блок управления 8 электроприводами шасси, модуль интегрированной навигационной системы, включающий блок инерциальной системы 9, комплексированный с блоком спутниковой навигационной системы в виде приемника 10 ГЛОНАСС с антенной 11, установленной сверху панели солнечной батареи 6.
Система технического зрения содержит лазерный оптический дальномер 12 в виде лазерного передатчика и электрооптического приемника для пространственной ориентации робота - опрыскивателя, цифровые оптико-электронные датчики 13 для определения степени засоренности приствольных полос сорными растениями, спектральные датчики 14 для определения поражения деревьев и кустарников вредителями и болезнями в режиме реального времени, ультразвуковые датчики 15 и 16 для идентификации деревьев и кустарников, их геометрических размеров, плотности кроны деревьев, расстояния между деревьями и кустарниками, расстояния до стволов деревьев 17. Все компоненты системы технического зрения комплексированы с бортовым компьютером 7.
Автоматическая метеорологическая измерительная система для определения, обработки, отображения и передачи данных о метеорологических параметрах в режиме реального времени содержит метеорологический модуль 18, включающий автоматические метеорологические датчики температуры, осадков, влажности воздуха, солнечной радиации, скорости и направления ветра, соединенные линиями связи, использующими, например, интерфейсы RS-232 или RS-485 с бортовым компьютером 7.
Система размещения, подачи и распределения рабочих жидкостей пестицидов содержит модуль размещения и подачи рабочей жидкости, включающий баки для рабочей жидкости инсектицидов или фунгицидов 19 и гербицидов 20 с электронными уровнемерами, подсоединенные к бакам 19 и 20 гидравлические насосы 21 и 22, соединенные гидролиниями с блоком 23 автоматического управления подачей, расходом и распределением потоков рабочей жидкости, к которому в свою очередь подсоединена система диспергирования рабочей жидкости с одной стороны, а с другой стороны блок 23 соединен линией связи в виде интерфейса с бортовым компьютером 7.
Система диспергирования рабочей жидкости содержит штанговый модуль, подсоединенные к штанговому модулю модуль обработки инсектицидами и фунгицидами крон деревьев и кустарников и модуль обработки приствольных полос гербицидами.
Штанговый модуль содержит установленную на платформе 1 вертикальную неподвижную П-образную раму 24, закрепленную в ее пазах вертикально подвижную прямоугольную раму 25, имеющую механизм вертикального подъема и опускания в виде электрического линейного актуатора 26 с встроенным контроллером, соединенные с рамой 25 посредством поворотных механизмов с электроприводом 27 симметричные консольно-поворотные горизонтальные фермы 28, например, с верхней решетчатой конструкцией и нижними подвесными горизонтальными направляющими 29, с установленными на них электроприводными механизмами горизонтального перемещения 30, 31, 32, соединенными с вертикальными стойками 33, 34, 35 с механизмами вертикального перемещения 36. На концах стоек 35 закреплены вертикальные линейные актуаторы 37, соответственно, с интегрируемыми в систему управления роботом - опрыскивателем программируемыми контроллерами. К механизмам вертикального перемещения 36 закреплены дугообразные коллекторы 38 с блоками 39 электрогидравлических распылителей рабочей жидкости разного типоразмера и воздушные рукава 40 с блоками воздушных сопел для распыления воздуха и осевыми вентиляторами 41 на концах рукавов 40. Воздушные рукава 40 выполнены в виде торообразной оболочки эквидистантно коллекторам 38.
Коллекторы 38 выполнены конгруэнтными, дугообразными с длиной хорд вертикальных коллекторов, по крайней мере, не менее высоты крон обрабатываемых деревьев и кустарников, с расстоянием между центрами противоположных дуг не менее диаметра обрабатываемых крон, причем коллекторы закреплены в центре их дуг, и воздушные рукава 40 выполнены в виде части торобразной оболочки эквидистантно дугам коллекторов.
Выполнение коллекторов 38 с блоками 39 дугообразными и конгруэнтными, а воздушных рукавов эквидистантно коллекторам в виде части поверхности тора обеспечивает равномерный и полный охват диспергируемой рабочей жидкостью крон деревьев и кустарников и минимизирует потери пестицидов.
На штоках вертикальных линейных актуаторов 38 закреплены двухсторонние телескопические горизонтальные штанги 42 с электроприводными механизмами 43 выдвижения-складывания секций, каждая из которых снабжена блоком 44 электрогидравлических распылителей, по крайней мере, не менее четырех, отличающихся типоразмерами, и с пропорциональным управлением от компьютера 7.
Робот-опрыскиватель для садоводства работает следующим образом.
Перед началом работы в бортовой компьютер 7 робота - опрыскивателя вводится электронная карта - задание на проведение технологического процесса дифференцированной обработки деревьев или кустарников пестицидами, в которой указываются границы и площадь квартала насаждений, длина квартала, ширина междурядий, расстояние между деревьями, высота обрабатываемых деревьев или кустарников и их координаты, ширина разворотной полосы, количество проходов по полю, схема обработки - траектория движения с учетом поворотов и заходов на следующий гон, координаты реперных точек начала и конца обработки, координаты реперных точек разворотов на последующие гоны, координаты места заправки рабочей жидкостью, расстояние от распылителей до кроны деревьев, перепад рабочего давления перед распылителями, рабочая скорость движения, норма расхода рабочей жидкости инсектицида или фунгицида и гербицида.
В соответствии с электронной картой-заданием в баки 19 и 20 заливается рабочая жидкость инсектицидов или фунгицидов и гербицидов соответственно.
Включается в работу система электропитания. Посредством солнечной батареи 6 происходит подзарядка блока аккумуляторных батарей 5. Электропитание подается к системе управления и навигации, системе технического зрения, автоматической метеорологической измерительной системе, системе размещения, подачи, распределения потоков и диспергирования рабочей жидкости пестицидов. Включаются система управления и навигации, система технического зрения, автоматическая метеорологическая измерительная система. В соответствии с электронной картой - заданием и по данным координат, получаемых приемником 10 ГЛОНАСС, робот - опрыскиватель устанавливается на исходную реперную точку начала обработки. Включается система технического зрения. От бортового компьютера 7 по линии связи передается сигнал на электроприводы поворотных механизмов 27 к электродвигателю линейного актуатора 26, электроприводным механизмам горизонтального перемещения 30, 31, 32, механизмам вертикального перемещения 36, электродвигателям линейных актуаторов 37. Посредством поворотных механизмов консольно-поворотные горизонтальные фермы 28 поворачиваются, занимают положение, перпендикулярное продольной оси X-X робота-опрыскивателя. Линейный актуатор 26 поднимает подвижную раму 24 и соответственно фермы 28 на заданную рабочую высоту H3 обработки насаждений инсектицидами или фунгицидами. Актуаторы 37 опускают телескопические штанги 42 на заданную высоту H4 обработки гербицидами приствольных полос. Посредством механизмов 43 секции штанг 42 выдвигаются на заданную ширину Во обработки гербицидами приствольных полос, контролируемую ультразвуковыми датчиками 16, при этом ширина Во меньше ширины междурядий Вм. Механизмами вертикального перемещения 36 коллекторы 38 с блоками 39 распылителей рабочей жидкости и воздушные рукава 40 устанавливаются на заданную высоту обработки крон деревьев или кустарников 17. Электроприводными механизмами горизонтального перемещения 30 и 31 вертикальные стойки 33 и 34 смещаются навстречу друг другу и, соответственно, коллекторы 37 с блоками распылителей 40 устанавливаются на заданное расстояние l для опрыскивания крон деревьев инсектицидами или фунгицидами.
По сигналу от бортового компьютера 7 через блок управления электроприводами шасси 8 включаются приводные моторы 4. Робот-опрыскиватель начинает движение по маршруту, запрограммированному картой - заданием обработки квартала насаждений. Интегрированная навигационная система посредством приемника 10 ГЛОНАСС с антенной 11 принимает сигналы от глобальной спутниковой системы, вычисляет текущие значения координат местоположения робота-опрыскивателя с передачей значений его позиционирования в компьютер 7. Компьютер 7 управляет автономным движением робота - опрыскивателя в реальном масштабе времени. Посредством лазерного оптического дальномера 12 осуществляется наблюдение за пространством и обнаружение незапрограммированных препятствий перед роботом - опрыскивателем.
Посредством цифровых оптико-электронных датчиков 13 определяется степень засоренности приствольных полос сорными растениями, спектральные датчики 14 определяют степень поражения деревьев и кустарников вредителями или болезнями в режиме реального времени при движении робота-опрыскивателя.
Ультразвуковые датчики 15 определяют геометрические размеры и плотность кроны деревьев и кустарников, расстояния между деревьями и кустарниками в ряду, ультразвуковые датчики 16 определяют расстояния до стволов деревьев 17.
Метеорологический модуль 18 посредством автоматических метеорологических датчиков определяет параметры внешней среды и передает их значение в компьютер 7.
Бортовой компьютер 7 посредством специального программного обеспечения обрабатывает получаемую от датчиков информацию и передает алгоритмы выполнения процесса опрыскивания садовых насаждений и приствольных полос в блок 23 автоматического управления подачей, расходом и распределением потоков рабочей жидкости пестицидов. Включаются в работу насосы 21 и 22 и вентиляторы 41.
Рабочая жидкость фунгицидов или инсектицидов и гербицидов из баков 19 и 20 соответственно насосами 21 и 22 подается в коллекторы 38 и к блокам распылителей 39. Воздух вентиляторами 41 нагнетается в воздушные рукава 40. Рабочая жидкость гербицида поступает по линиям связи к блокам 44 электрогидравлических распылителей телескопических штанг 42. Бортовой компьютер 7 передает сигнал на включение в работу воздушных сопел воздушных рукавов 40.
По сигналу от компьютера 7 в соответствии с алгоритмом дифференцированной обработки крон деревьев и кустарников, предписывающим открытие одного или нескольких распылителей заданного типоразмера в блоках 39 коллекторов 38 в зависимости от фитосанитарного состояния деревьев и кустарников, степени, площади и зоны поражения крон вредителями и болезнями с учетом экономического порога вредоносности, нормы внесения рабочей жидкости, перепада давления перед распылителями, шага расстановки распылителей, скорости движения робота - опрыскивателя. Рабочая жидкость диспергируется распылителями на крону деревьев или кустарников. Одновременно выходящий из воздушных сопел рукавов 40 воздух создает мощный распределенный воздушный поток с двух противоположных сторон крон деревьев и кустарников, который обеспечивает принудительное равномерное осаждение диспергируемых капель рабочей жидкости на кроне, минимизирует потери пестицидов.
Посредством цифровых оптико-электронных датчиков 13 определяется степень засоренности приствольных полос сорными растениями. Информация по участкам засоренности сорными растениями передается в компьютер 7, от которого управляющие сигналы передаются в блоки 44 распылителей на открытие распылителей для диспергирования рабочих растворов гербицидов в приствольные полосы, при этом внесение гербицидов осуществляется дифференцированно на засоренных участки приствольных полос, за счет программируемого включения и выключения распылителей на штангах 42.
При переходе от обработки пестицидами от одного дерева или кустарника к другому в каждом ряду, датчики 15 передают в компьютер 7 сигнал об отсутствии или наличии деревьев, или кустарников в ряду. Компьютер 7 передает сигнал в блок 23 автоматического управления подачей, расходом и распределением потоков рабочей жидкости, от которого поступает управляющее воздействие на отключение блоков 39 распылителей. Опрыскивание прекращается, и начинается при попадании в зону опрыскивания деревьев или кустарников, определяемую коллекторами 37 с рукавами 40.
Применение робота - опрыскивателя для садоводства обеспечивает дифференцированную обработку пестицидами крон деревьев и кустарников и их приствольных полос в зависимости от фитосанитарного состояния крон деревьев и кустарников и засоренности приствольных полос сорными растениями, сводит к минимуму потери пестицидов, уменьшение загрязнения окружающей среды пестицидами до предельно допустимых концентраций, повышение производительности выполнения технологического процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный робот-опрыскиватель плодовых деревьев и кустарников | 2022 |
|
RU2794786C1 |
| Мобильный робот для контактного нанесения пестицидов | 2023 |
|
RU2797047C1 |
| Беспилотный летательный аппарат для обработки пестицидами садовых деревьев и кустарников | 2023 |
|
RU2808292C1 |
| Беспилотный летательный аппарат для обработки пестицидами пропашных культур | 2023 |
|
RU2808295C1 |
| Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур | 2019 |
|
RU2731082C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Беспилотный летательный аппарат для внесения пестицидов в точном садоводстве | 2023 |
|
RU2793020C1 |
| Машина для дифференцированного внесения пестицидов, жидких минеральных удобрений и других агрохимикатов | 2020 |
|
RU2748996C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2811604C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2808008C1 |
Изобретение относится к области сельского хозяйства. Робот-опрыскиватель содержит самоходное четырехколесное шасси в виде прямоугольной платформы с передними направляющими и задними ведущими колесами с приводом от электромоторов, систему электропитания, включающую блоки аккумуляторных батарей и панель солнечной батареи, систему управления и навигации, включающую бортовой компьютер, блок управления электроприводами шасси, модуль интегрированной навигационной системы, систему технического зрения в виде лазерного оптического дальномера, цифровых оптико-электронных, спектральных и ультразвуковых датчиков, автоматическую метеорологическую измерительную систему, включающую автоматические метеорологические датчики, систему размещения, подачи и распределения рабочих жидкостей пестицидов, систему диспергирования рабочей жидкости, включающую штанговый модуль, подсоединенные к штанговому модулю модуль обработки инсектицидами и фунгицидами крон деревьев и кустарников и модуль обработки гербицидами приствольных полос. Панель солнечной батареи выполнена в виде половины поверхности эллипсоида вращения. Каждая из консольно-поворотной горизонтальной фермы штангового модуля соединена с вертикальной подвижной прямоугольной рамой посредством поворотных механизмов с электроприводом и снабжена нижними подвесными горизонтальными направляющими. На каждой направляющей установлены электроприводные механизмы горизонтального перемещения, соединенные, по крайней мере, с двумя вертикальными стойками, снабженными механизмами вертикального перемещения и, по крайней мере, одной стойкой с вертикальным линейным актуатором. К электроприводным механизмам горизонтального перемещения присоединены коллекторы с блоками электрогидравлических распылителей рабочей жидкости и воздушные рукава с воздушными соплами. Коллекторы выполнены конгруэнтными, дугообразными с длиной хорд вертикальных коллекторов, по крайней мере, не менее высоты крон с расстоянием между центрами противоположных дуг не менее диаметра обрабатываемых крон. Коллекторы закреплены в центре их дуг, и воздушные рукава выполнены в виде части торообразной оболочки эквидистантно дугам коллекторов. На штоках вертикальных линейных актуаторов закреплены двухсторонние телескопические горизонтальные штанги с электроприводными механизмами выдвижения-складывания секций, каждая из которых снабжена блоком электрогидравлических распылителей. Все блоки электрогидравлических распылителей соединены линией связи с блоком автоматического управления подачей, расходом и распределением потоков рабочей жидкости. Обеспечивается дифференцированная обработка пестицидами крон деревьев и кустарников и их приствольных полос в зависимости от фитосанитарного состояния крон деревьев и кустарников и засоренности приствольных полос сорными растениями, сведение к минимуму потерь пестицидов, уменьшение загрязнения окружающей среды пестицидами до предельно допустимых концентраций, повышение производительности выполнения технологического процесса. 2 ил.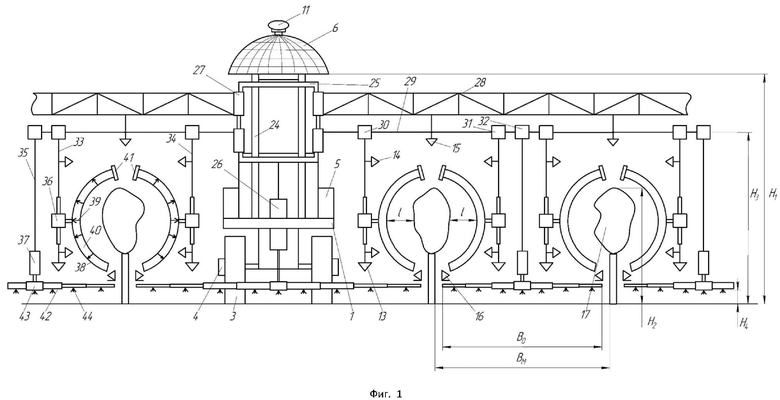
Робот-опрыскиватель для садоводства, содержащий самоходное четырехколесное шасси в виде прямоугольной платформы с передними направляющими и задними ведущими колесами с приводом от электромоторов, систему электропитания, включающую блоки аккумуляторных батарей и панель солнечной батареи, систему управления и навигации, включающую бортовой компьютер, блок управления электроприводами шасси, модуль интегрированной навигационной системы, систему технического зрения в виде лазерного оптического дальномера, цифровых оптико-электронных, спектральных и ультразвуковых датчиков, автоматическую метеорологическую измерительную систему, включающую автоматические метеорологические датчики, систему размещения, подачи и распределения рабочих жидкостей пестицидов, систему диспергирования рабочей жидкости, включающую штанговый модуль, подсоединенные к штанговому модулю модуль обработки инсектицидами и фунгицидами крон деревьев и кустарников и модуль обработки гербицидами приствольных полос, отличающийся тем, что панель солнечной батареи выполнена в виде половины поверхности эллипсоида вращения с большей осью параллельной продольной оси симметрии робота-опрыскивателя, а каждая консольно-поворотная горизонтальная ферма штангового модуля соединена с вертикальной подвижной прямоугольной рамой посредством поворотных механизмов с электроприводом и снабжена нижними подвесными горизонтальными направляющими с установленными на каждой направляющей электроприводными механизмами горизонтального перемещения, соединенными, по крайней мере, с двумя вертикальными стойками, снабженными механизмами вертикального перемещения и, по крайней мере, одной стойкой с вертикальным линейным актуатором, при этом к электроприводным механизмам горизонтального перемещения присоединены коллекторы с блоками электрогидравлических распылителей рабочей жидкости и воздушные рукава с воздушными соплами, причем коллекторы выполнены конгруэнтными, дугообразными с длиной хорд вертикальных коллекторов, по крайней мере, не менее высоты крон с расстоянием между центрами противоположных дуг не менее диаметра обрабатываемых крон, причем коллекторы закреплены в центре их дуг, и воздушные рукава выполнены в виде части торобразной оболочки эквидистантно дугам коллекторов, а на штоках вертикальных линейных актуаторов закреплены двухсторонние телескопические горизонтальные штанги с электроприводными механизмами выдвижения-складывания секций, каждая из которых снабжена блоком электрогидравлических распылителей, причем все блоки электрогидравлических распылителей соединены линией связи с блоком автоматического управления подачей, расходом и распределением потоков рабочей жидкости.
| Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур | 2019 |
|
RU2731082C1 |
| Устройство для разгрузки балластных железнодорожных платформ | 1940 |
|
SU58856A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |

