Изобретение относится к сельскому хозяйству, в частности к мобильным сельскохозяйственным роботам для обработки растений пестицидами контактным способом.
Известно устройство для нанесения ядохимикатов на растения, содержащее емкость для жидкого агрохимиката в виде горизонтальной полой штанги и эластичный пористый фильтр в виде контактного плотна, закрепленный одним концом на штанге, а другой конец фитиля выполнен в виде бахромы, при этом фитиль имеет дополнительный верхний эластичный слой, непроницаемый для жидкости и газа, и между дополнительным верхним и пористыми слоями фитиля помещены гибкие перфорированные трубки, соединенные с полостью штанги (а.с. SU № 1158138, МПК A01M, 1985).
Недостатками известного устройства являются неравномерное орошение контактного полотна рабочей жидкостью агрохимиката и, как следствие, неравномерное распределение агрохимиката по растениям, ручная настройка на заданную высоту обработки и режимов нанесения агрохимиката, невозможность дифференцированного нанесения агрохимиката как по рабочей ширине захвата устройства, так и по высоте обрабатываемых растений, а также нежелательная обработка культурных растений гербицидами при их применении.
Известен мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур, содержащий самодвижущееся четырехколесное шасси в виде горизонтальной рамы, заднюю и фронтальную вертикальные прямоугольные рамы с подвижными направляющими, заднюю и фронтальную горизонтальные штанги с механизмами подъема и опускания штанг, систему автономного электропитания в виде блока бортовых аккумуляторных батарей и панель солнечной батареи с множеством объединенных фотоэлементов, выполненную в виде половины поверхности сплюснутого сфероида вращения, систему управления и навигации в виде бортового компьютера, модуль интегрированной навигационной системы, блок управления электроприводами шасси, систему технического зрения, включающую установленные на фронтальной штанге трехмерный сканирующий лазерный оптический дальномер и цифровые оптико-электронные датчики, систему пенообразования и внесения пестицидов, включающую блок автоматического управления подачей, расходом и распределением рабочих растворов пестицидов и сжатого воздуха, связанный интерфейсом с центральным процессором бортового компьютера, гидравлические и пневматические коммуникации, соединенные с модулями пенообразования и внесения пестицидов, ультразвуковые датчики, бак и миксер для рабочих растворов пестицидов, насосный агрегат, источник сжатого воздуха с пневматическим оборудованием, модули пенообразования и внесения пестицидов( п. RU № 2731082, МПК A01M 7/00, A01C 23/00, A01B 69/00, G05D 1/02, 2019).
Недостатками известного робота-опрыскивателя являются ограниченные технологические возможности, возникающие вследствие обработки пестицидами, в частности инсектицидами и фунгицидами только низкорастущих пропашных культур, излишние затраты энергии, связанные с обеспечением подачи воздуха в пеногенераторы, а также то, что при обработке гербицидами сорных растений происходит и обработка гербицидами возделываемых культур.
Технической задачей изобретения является повышение качества и эффективности обработки агроценозов от сорных растений регуляторами роста растений, уменьшение норм внесения пестицидов, их потерь, минимизация рисков загрязнения окружающей среды.
Поставленная техническая задача достигается тем, что в мобильном роботе для контактного нанесения пестицидов, содержащем самоходное шасси, включающее платформу с передними направляющими и задними ведущими колесами с приводом от электромоторов, заднюю и фронтальную прямоугольные рамы, с внутренними подвижными рамами и линейными актуаторами, систему электропитания, включающую блоки аккумуляторных батарей и панель солнечной батареи, систему управления и навигации, включающую бортовой компьютер, интегрированную навигационную систему, блок автоматического управления технологическим оборудованием, блок управления системой рабочих органов, систему технического зрения, включающую лазерный оптический дальномер, цифровые оптоэлектронные и ультразвуковые датчики, систему размещения, подачи, распределения потоков рабочей жидкости пестицидов, включающую бак для рабочей жидкости пестицидов, насос с электроприводом, напорные и сливные гидролинии, клапаны переливной, редукционный, запорный, расходомер, распределительный коллектор, систему рабочих органов, включающую штангу с модулями для контактного нанесения пестицидов, система рабочих органов для контактного нанесения пестицидов содержит ряд независимых и одинаковых модулей, закрепленных на штанге посредством консольных кронштейнов на концах которых установлены вертикальные электрические линейные актуаторы, с контактирующими устройствами, каждый из которых выполнен в форме авиационного прямого крыла с несимметричным плосковыпуклым профилем, перевернутогона 180° верхней частью вниз и выполняющей роль контактирующей поверхности, а нижней плоской частью вверх, выполняющей роль крепежного фланца, соединенного со штоком вертикального линейного актуатора, причем внутренняя часть крыла заполнена упругим губчатым материалом с пористой структурой с открытыми сообщающимися порами-каналами во всем объеме губчатого пористого материала, а нижняя контактирующая часть имеет водопроницаемую, механически прочную, химически стойкую пропиточную обшивку, а в объеме губчатого материала установлены распределительные точечные инъекторы таким образом, что условная кривая проходящая по концам инъекторов эквидистантна кривой, описывающей контактирующую поверхность, при этом входные отверстия распределительных точечных инъекторов соединены с выходными отверстиями запорных клапанов с электромагнитным управлением, подсоединенными входными отверстиями к распределительному коллектору связанному через запорный клапан, датчик давления, расходомер, редукционный и сливной пропорциональные клапаны с электроприводным насосом.
Изобретение поясняется чертежами.
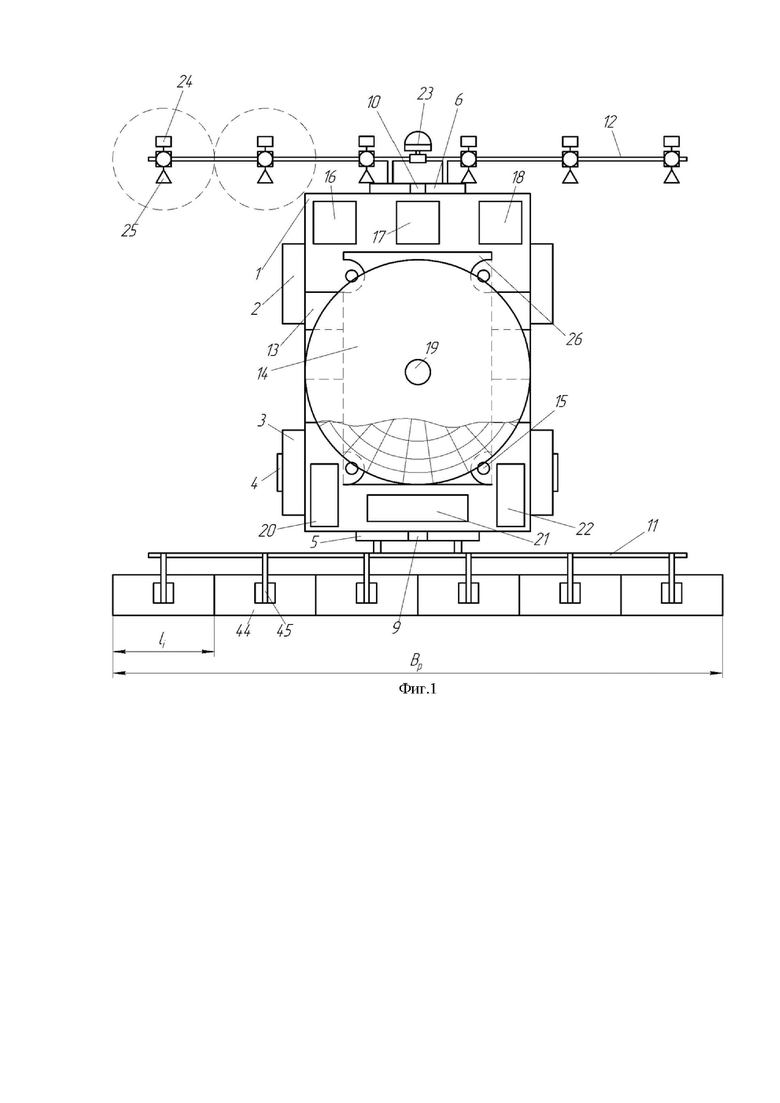
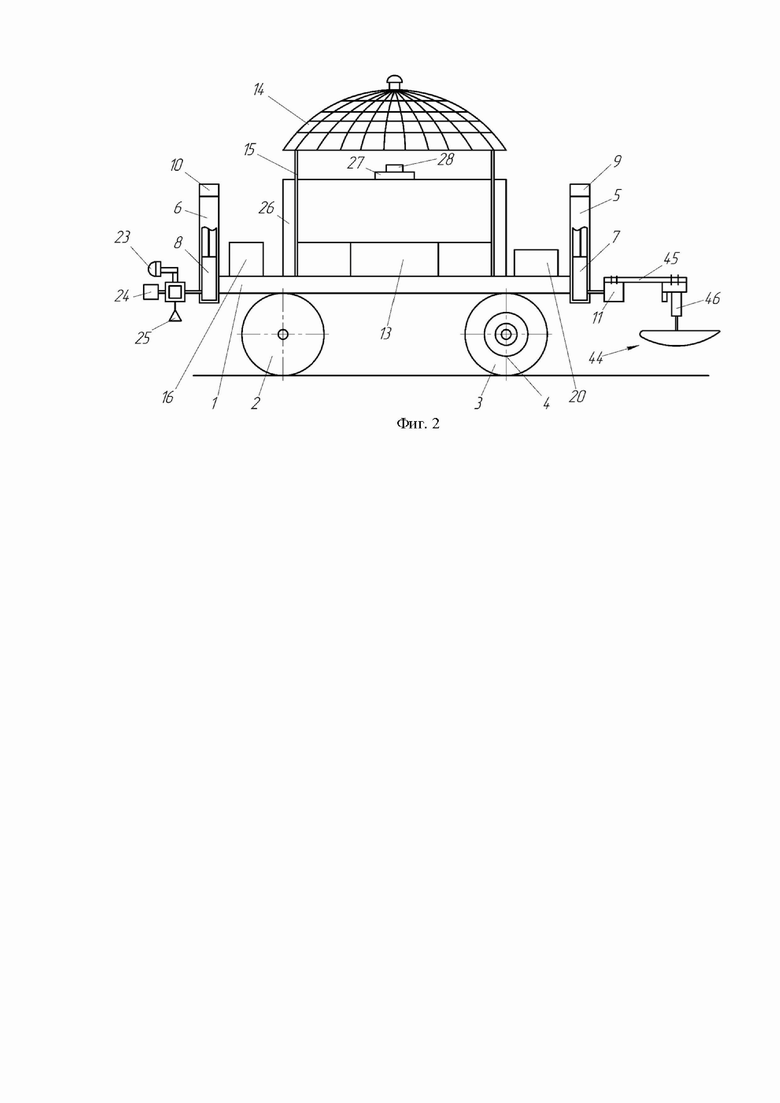
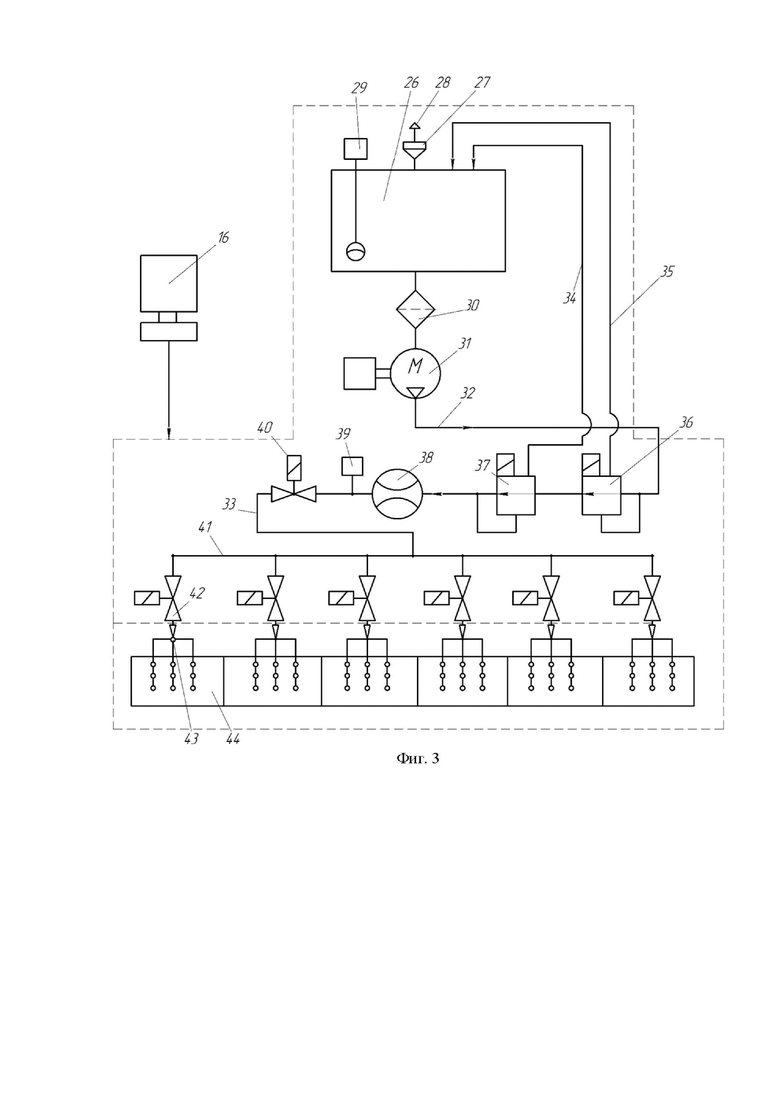
На фиг. 1 представлен мобильный робот для контактного нанесения пестицидов, вид сверху; на фиг. 2 то же, вид сбоку; на фиг. 3 электрогидравлическая схема размещения, подачи, распределения потоков рабочей жидкости пестицидов; на фиг. 4 - схема модуля для контактного нанесения пестицидов.
Мобильный робот для контактного нанесения пестицидов содержит самоходное шасси, систему электропитания, систему управления и навигации, систему технического зрения, систему размещения, подачи, распределения потоков рабочей жидкости пестицидов, систему рабочих органов для контактного нанесения пестицидов на растения.
Самоходное шасси содержит платформу 1 с передними направляющими колесами 2 и задними ведущими колесами 3 с приводом от электромоторов 4, прикрепленные к платформе заднюю 5 и фронтальную 6 прямоугольные рамы, внутри которых установлены подвижные рамы 7 и 8 с возможностью вертикального перемещения и связанные посредством штоков с линейным актуаторами 9 и 10 с одной стороны, с другой стороны к подвижным рамам 7и 8 закреплены горизонтальные штанги 11 и 12. Актуаторы 9 и 10обеспечивают вертикальный подъем и установку штанг 12 и 13 и интегрированы в систему управления и навигации мобильного робота.
Система электропитания содержит установленные на платформе 1 блоки аккумуляторных батарей 13, панель солнечной батареи 14, установленную на стойках 15.Посредством солнечной батареи 14 происходит подзарядка блоков аккумуляторных батарей 13.
Система автоматического управления и навигации содержит бортовой компьютер 16 с центральным процессором для накопления, обработки информации, формирования команд управления и преобразования их в управляющие сигналы в соответствии с программой обработки сельскохозяйственного поля и данными, получаемыми от системы технического зрения, интегрированную навигационную систему, включающую блок инерциальной системы 17, приемник 18 ГЛОНАСС с антенной 19, установленной сверху панели солнечной батареи 14, блок 20 управления электроприводами шасси, блок 21автоматического управления технологическим оборудованием системы размещения, подачи, распределения потоков рабочей жидкости, блок 22 управления системой рабочих органов. Блок 21 с одной стороны связан интерфейсом с центральным процессором бортового компьютера, с другой стороны гидролиниями соединен с системой рабочих органов для контактного нанесения пестицидов.
Система технического зрения содержит, установленные на штанге лазерный оптический дальномер 23 для пространственной ориентации робота-опрыскивателя, цифровые оптоэлектронные датчики 24 для определения наличия и плотности сорных растений, вредителей и болезней, ультразвуковые датчики расстояния 25 для определения геометрических размеров культурных и сорных растений. Все компоненты системы технического зрения комплексированы с бортовым компьютером 16.
Система размещения, подачи и распределения потоков рабочей жидкости пестицидов содержит бак для рабочей жидкости пестицидов 26, оснащенный заправочной горловиной 27 с дыхательным клапаном 28, электронным уровнемером 29, фильтром 30,насос с электроприводом 31, напорные гидролинии32,33 и сливные 34, 35, клапан 36 электрогидравлический переливной с пропорциональным управлением, пропорциональный редукционный клапан 37, регулирующий давление и расход потока рабочей жидкости в соответствии с опорными сигналами, электромагнитный расходомер 38, датчик давления жидкости 39, клапан запорный нормально закрытый с электромагнитным управлением 40, соединенный гидролинией с распределительным коллектором 41 с запорными клапанами с электромагнитным управлением 42, соединенными выходными отверстиями с входными отверстиями распределительных точечных инъекторов 43. Управляемое электрогидравлическое оборудование системы размещения, подачи и распределения потоков рабочей жидкости соединено линиями связи с бортовым компьютером 16.
Наличие распределительного коллектора 41с запорными клапанами 42,соединенными выходными отверстиями с входными отверстиями распределительных точечных инъекторов 43 обеспечивает дифференцированную обработку пестицидами на общей ширине захвата Bр.
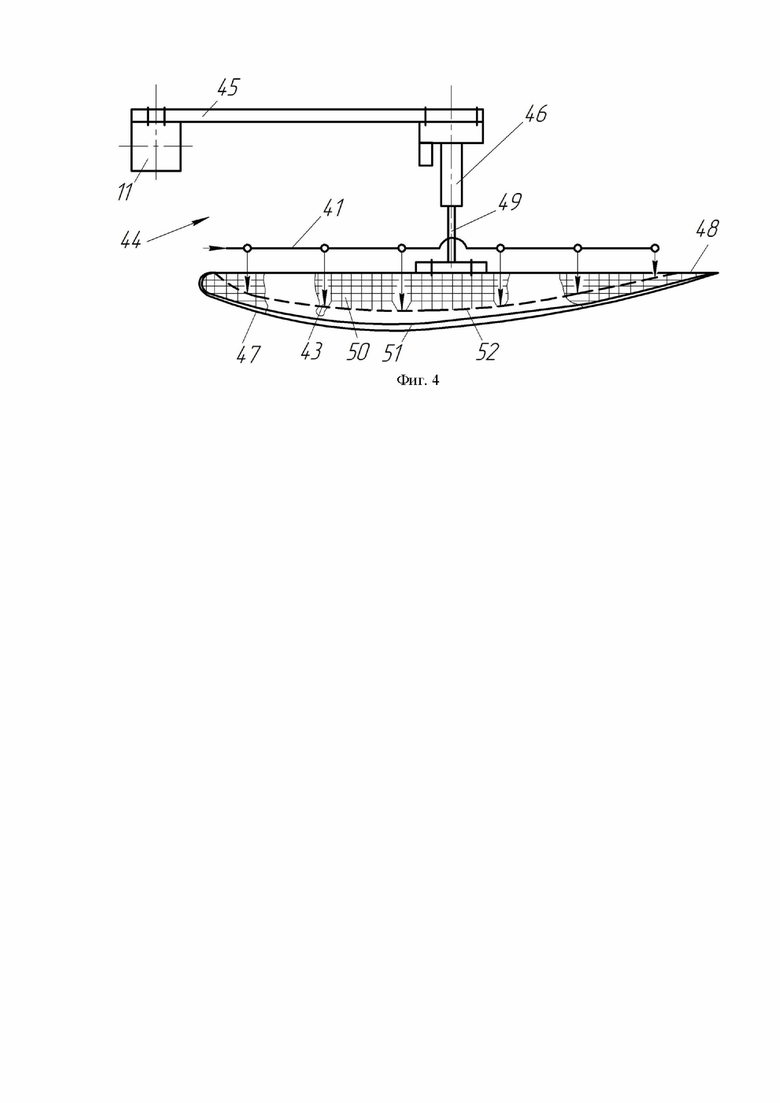
Система рабочих органов для контактного нанесения пестицидов содержит ряд независимых и одинаковых модулей 44 - функционально законченных узлов, закрепленных на штанге 11 посредством консольных кронштейнов 45на концах которых установлены вертикальные электрические линейные актуаторы46 с контроллерами и связанные с контактирующими устройствами 44, каждый из которых выполнен в форме авиационного прямого крыла с несимметричным плоско-выпуклым профилем, представляющим собой сечение авиационного крыла плоскостью, перпендикулярной размаху крыла(например, профиль ЦАГИ-831), перевернутого верхней частью на 180° вниз, выполняющей роль контактирующей поверхности 47, а нижней плоской частью 48 вверх, выполняющей роль крепежного фланца, соединенного со штоком 49 вертикального линейного актуатора 46, при этом внутренняя часть крыла заполнена упругим губчатым материалом 50 с пористой структурой с открытыми сообщающимися порами-каналами во всем объеме губчатого пористого материала 50, а нижняя часть 47 имеет водопроницаемую, механически прочную, химически стойкую пропиточную обшивку 51,(например, нейлоновую), контактирующую с растениями.
Распределительные точечные инъекторы 43 установлены в объеме губчатого материала 50 таким образом, что условная кривая 52проходящая по концам инъекторов 43 эквидистантна кривой, описывающей контактирующую поверхность 47. Каждый модуль 44 имеет длину li, а их сумма составляет общую ширину захвата Bр .
Модульная система построения рабочих органов для контактного нанесения пестицидов позволяет создавать многофункциональные комбинации положения высоты контактирующих устройств 44, относительно растительного покрова. Представленная форма контактирующей поверхности 47 в виде перевернутого авиационного прямого крыла с несимметричным плосковыпуклым профилем обеспечивает наибольшую площадь контакта для наилучшего переноса пестицида на растения. Установка распределительных точечных инъекторов 43 в объеме губчатого материала 50 выполнена таким образом, что условная кривая 52, проходящая по концам инъекторов 43, эквидистантна (равноудалена) кривой, описывающей контактирующую поверхность 47, что обеспечивает равномерное насыщение губчатого материала 50 рабочей жидкостью пестицида.
Мобильный робот для контактного нанесения пестицидов работает следующим образом.
В центральный процессор бортового компьютера 16 загружается карта-задание на проведение технологического процесса дифференцированной обработки сельскохозяйственного поля пестицидами, в котором отображаются в электронном виде границы и площадь обрабатываемого сельскохозяйственного поля, длина гона, ширина разворотной полосы, запрограммированная траектория движения мобильного робота с учетом поворотов и заходов на следующий гон, координаты реперной точки начала и конца обрабатываемого участка, координаты точек разворота на очередной гон, координаты места заправки рабочим раствором, норма внесения пестицида (например, гербицида или регулятора роста растений), рабочая скорость движения, рабочая ширина захвата. При работе в режиме Off-line (двухэтапный технологический подход с использованием предварительно разработанных цифровых карт-заданий)вводятся дополнительно такие параметры, как ранее полученные координаты каждого элементарного обрабатываемого участка поля, ширина которого равна длине li модуля, а длина определяется степенью вариабельности высоты растительного покрова культурных и сорных растений в пределах экономического порога вредоносности, или необходимости применения регуляторов роста растений для выравнивания посевов. В режиме On-line(одноэтапные технологические решения в реальном масштабе времени) указанные дополнительные параметры считываются системой технического зрения, посредством датчиков 23,24, 25при движении мобильного робота с передачей данных в бортовой компьютер 16 для формирования команд управления.
В бак 26 заливается рабочая жидкость пестицида. Включается в работу система автономного электропитания. Посредством солнечной батареи 14 происходит подзарядка аккумуляторных батарей 13, от которых электропитание подается к системе управления и навигации, системе технического зрения, системе размещения, подачи, распределения потоков рабочей жидкости пестицидов, системе рабочих органов для контактного нанесения пестицидов на растения. В соответствии с электронной картой-заданием обрабатываемых участков поля и по навигационным данным, получаемых от приемника 18 ГЛОНАСС, мобильный робот устанавливается на исходную реперную точку начала работы. По сигналу от компьютера посредством линейных актуаторов 9 и 10 штанги 11 и 12 устанавливаются на заданную высоту обработки растительного покрова. По сигналу от компьютера 16 через блок 20 управления электроприводами шасси включаются электроприводные моторы 4. Робот начинает движение по запрограммированной траектории. Интегрированная навигационная система передает комплексную информацию в бортовой компьютер 16 о позиционировании и динамике движения мобильного робота. Посредством лазерного оптического дальномера 23 осуществляется наблюдение за пространством и обнаружение не запрограммированных препятствий перед роботом. Посредством ультразвуковых датчиков 25 измеряются высоты положения штанг 11, 12 относительно культурных, сорных растений и поверхности почвы. Посредством цифровых оптоэлектронных датчиков 24 определяется степень засоренности культурных растений, плотности распределения сорных растений с учетом экономического порога вредоносности или отсутствие сорных растений на определенном элементарном участке обрабатываемого поля.
Бортовой компьютер 16 посредством программного обеспечения в режиме реального времени обрабатывает поступившую информацию от каждого из датчиков 23, 24, 25 и передает алгоритмы управления в блоки 20, 21, 22. Блок 20 обеспечивает движение мобильного робота по заданной траектории и с заданной рабочей скоростью. Блок 21 включает в работу насос 31, открываются клапаны 36, 37, 40, 42.Рабочая жидкость от насоса 31 по гидролинии 32 поступает в клапан 36, который поддерживает заданное давление на входе за счет байпасирования части потока рабочей жидкости по гидролинии 35 в бак 26. Из клапана 36 рабочая жидкость поступает в клапан 37, который поддерживает выходное значение перепада давления на заданном уровне или меняет его по заданной программе по сигналу от компьютера 16. От клапана 37 поток жидкости поступает в расходомер 38, который определяет текущее значение расхода рабочей жидкости и передает его в компьютер 16. От расходомера 38 поток рабочей жидкости поступает в датчик давления 39, выходной сигнал от которого поступает в компьютер 16. Далее через открытый клапан 40 по гидролинии 33 рабочая жидкость поступает в распределительный коллектор 41 и далее через клапаны 42 нагнетается в инъекторы 43, от которых происходит насыщение губчатого материала 50 рабочей жидкостью, например, гербицида и, соответственно, насыщение пропиточной обшивки 51. При движении мобильного робота пропиточная обшивка 51 модулей 44 скользит по поверхности растения и смачивает их вегетативную часть рабочей жидкостью гербицида.
При контактном способе внесения гербицидов на качество обработки агроценозов как по отдельным участкам, так и по всей площади обрабатываемого поля влияют густота произрастания и неравномерность распределения сорных растений в агроценозе, физико-механические свойства сорных и культурных растений, в частности высота растений, соотношение высоты сорных и культурных растений.
При обработке агороценозов регуляторами роста растения и другими биологическими активными веществами на качество контактной обработки может влиять неравномерность высот растительности посевов сельскохозяйственных культур.
Построение карты пространственного распределения высот растений сельскохозяйственных культур и степени засоренности агроценозов осуществляется на основе дистанционной съемки с помощью беспилотных летательных аппаратов (Построение и анализ карт высот растительности агроценозов по данным беспилотной съемки в различные фазы вегетации / ЕмельяновД. В., БотвичИ. Ю., ИвченкоВ. К.,. ШевырноговА. П. // Журн. Сиб. федер. ун-та. Техника и технологии. 2022. 15(3). С. 308–317. Использование беспилотных летательных аппаратов для целей фитосанитарного мониторинга в отношении сорных растений. // Шумилов А.В., Лунева Н.Н., Ермоленко А.П. и др.Вестник защиты растений. №4 (98). 2018.С. 22-27).
Полученные карты высот растительности и засоренности посевов переводят в электронном вид и наряду с другими параметрами загружают в бортовой компьютер 16 мобильного робота опрыскивателя. В данном случае робот работает в режиме Off-line. В бортовой компьютер 16 непрерывно поступает информация от интегрированной навигационной системы о координатах положения робота на сельскохозяйственном поле. Компьютер 16 сравнивает текущие координаты положения робота с координатами элементарных участков поля, считывает с электронной карты координаты характеризующие участки засоренности посевов и вариабельности высот растительности на каждом элементарном участке поля и передает алгоритм работы системе размещения, подачи, распределения потоков рабочей жидкости пестицидов и рабочих органов для контактного нанесения пестицидов на растения, управляющие сигналы поступают в блоки 21, 22 от которых сигналы идут на открытие заданных клапанов 42 для подачи рабочего раствора в инъекторы 43 соответствующего модуля 44, и закрытие их, когда на обрабатываемом участке засоренность сорными растениями не превышает экономического порога вредоносности. Одновременно сигнал от блока 22 поступает в контроллеры линейных актуаторов 9 и 10, которые выдвигают или убирают шток 49 и вместе с тем опускают или поднимают модули 44, обеспечивая тем самым заданный контакт рабочей поверхности с растениями, то есть происходит дифференциация обработки по высоте.
При работе в режиме On-line работа мобильного робота в общем осуществляется также, как и режиме Off-line за исключением того, что информация по высотам растений и степени их засоренности поступает в бортовой компьютер 16 от датчиков 24,25 в реальном масштабе времени без использования предварительно разработанных карт-заданий по высотам растительности и наличия сорных растений.
Применение мобильного робота для обработки для обработки растений пестицидами контактным способом обеспечит повышение эффективности действия пестицидов, дифференцирование внесения рабочих растворов пестицидов в зависимости от фитосанитарного состояния растений и их снижение, сведение к минимуму потерь пестицидов, уменьшение рисков загрязнения окружающей среды пестицидами до предельно допустимых концентраций, повышение производительности выполнения технологического процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот-опрыскиватель для садоводства | 2022 |
|
RU2790688C1 |
| Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур | 2019 |
|
RU2731082C1 |
| Мобильный робот-опрыскиватель плодовых деревьев и кустарников | 2022 |
|
RU2794786C1 |
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Машина для дифференцированного внесения пестицидов, жидких минеральных удобрений и других агрохимикатов | 2020 |
|
RU2748996C1 |
| Комплекс летательных аппаратов для внесения жидких средств химизации в точном земледелии | 2016 |
|
RU2617163C1 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| АВТОЖИР ДЛЯ ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ ЖИДКИХ СРЕДСТВ ХИМИЗАЦИИ | 2014 |
|
RU2589801C1 |
Мобильный робот для контактного нанесения пестицидов содержит самоходное шасси, включающее платформу 1 с передними направляющими 2 и задними 3 ведущими колесами с приводом от электромоторов 4, заднюю 5 и фронтальную 6 прямоугольные рамы, с внутренними подвижными рамами 7 и 8 и линейными актуаторами 9, 10, систему электропитания, включающую блоки аккумуляторных батарей 13 и панель солнечной батареи 14, систему управления и навигации, включающую бортовой компьютер 16, интегрированную навигационную систему, блок автоматического управления технологическим оборудованием 21, блок управления системой рабочих органов 22, систему технического зрения, включающую лазерный оптический дальномер 23, цифровые оптоэлектронные 24 и ультразвуковые 25 датчики, систему размещения, подачи, распределения потоков рабочей жидкости пестицидов, включающую бак 26 для рабочей жидкости пестицидов, насос с электроприводом 31, напорные 32, 33 и сливные 34, 35 гидролинии, клапаны переливной 36, редукционный 37, запорный 40, расходомер 38, распределительный коллектор 41, систему рабочих органов для контактного нанесения пестицидов, включающую штангу 11 с модулями 44. Система рабочих органов для контактного нанесения пестицидов снабжена рядом одинаковых и независимых моделей 44, закрепленных на штанге 11 посредством консольных кронштейнов 45, на концах которых установлены вертикальные электрические линейные актуаторы 46 с контактирующими устройствами, каждый из которых выполнен в форме авиационного прямого крыла с несимметричным плосковыпуклым профилем, перевернутым на 180° верхней частью вниз, выполняющей роль контактирующей поверхности 47. Внутренняя часть крыла заполнена упругим губчатым материалом 50 с пористой структурой, а нижняя контактирующая часть 47 имеет водопроницаемую, механически прочную, химически стойкую пропиточную обшивку 51. В объеме губчатого материала установлены распределительные точечные инъекторы 43, соединенные с выходными отверстиями запорных клапанов с электромагнитным управлением 42, подсоединенными входными отверстиями к распределительному коллектору 41, связанному гидролиниями 33 и 32 через клапаны 40, 37, 36 с электроприводным насосом 31. Техническим результатом является повышение качества и эффективности обработки агроценозов от сорных растений, уменьшение норм внесения пестицидов, их потерь, минимизация рисков загрязнения окружающей среды. 4 ил.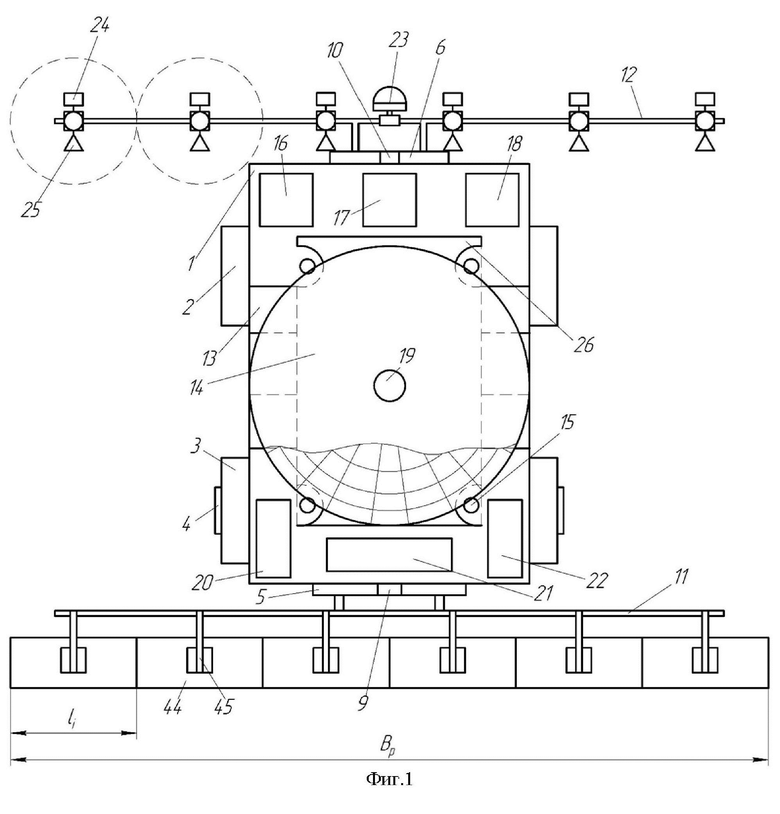
Мобильный робот для контактного нанесения пестицидов, содержащий самоходное шасси, включающее платформу с передними направляющими и задними ведущими колесами с приводом от электромоторов, заднюю и фронтальную прямоугольные рамы, с внутренними подвижными рамами и линейными актуаторами, систему электропитания, включающую блоки аккумуляторных батарей и панель солнечной батареи, систему управления и навигации, включающую бортовой компьютер, интегрированную навигационную систему, блок автоматического управления технологическим оборудованием, блок управления системой рабочих органов, систему технического зрения, включающую лазерный оптический дальномер, цифровые оптоэлектронные и ультразвуковые датчики, систему размещения, подачи, распределения потоков рабочей жидкости пестицидов, включающую бак для рабочей жидкости пестицидов, насос с электроприводом, напорные и сливные гидролинии, клапаны переливной, редукционный, запорный, расходомер, распределительный коллектор, систему рабочих органов, включающую штангу с модулями для контактного нанесения пестицидов, отличающийся тем, что система рабочих органов для контактного нанесения пестицидов снабжена рядом независимых и одинаковых модулей, закрепленных на штанге посредством консольных кронштейнов, на концах которых установлены вертикальные электрические линейные актуаторы с контактирующими устройствами, каждый из которых выполнен в форме авиационного прямого крыла с несимметричным плосковыпуклым профилем, перевернутым на 180° верхней выпуклой частью вниз, выполняющей роль контактирующей поверхности, и плоской частью вверх, выполняющей роль крепежного фланца, соединенного со штоком вертикального линейного актуатора, причем внутренняя часть крыла заполнена упругим губчатым материалом с пористой структурой с открытыми сообщающимися порами-каналами во всем его объеме, а нижняя контактирующая часть выполнена водопроницаемой, механически прочной и с химически стойкой обшивкой, а в объеме губчатого материала установлены распределительные точечные инъекторы таким образом, что условная кривая, проходящая по концам инъекторов, эквидистантна кривой, описывающей контактирующую поверхность, при этом входные отверстия распределительных точечных инъекторов соединены с выходными отверстиями запорных клапанов с электромагнитным управлением, подсоединенными входными отверстиями к распределительному коллектору, связанному гидролиниями через запорный клапан, датчик давления, расходомер, редукционный и сливной пропорциональные клапаны с электроприводным насосом.
| Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур | 2019 |
|
RU2731082C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ФОРМИРОВАНИЕМ УРОЖАЯ | 2003 |
|
RU2264703C2 |
| Устройство для внутрипочвенного дифференцированного внесения жидких минеральных удобрений и пестицидов | 2021 |
|
RU2770488C1 |
| US 10813263 B2, 27.10.2020 | |||
| FR 3093620 A1, 18.09.2020 | |||
| CN 205233280 U, 18.05.2016. | |||

