ОБЛАСТЬ ТЕХНИКИ
[1] Настоящее техническое решение, в общем, относится к области доставки грузов, а в частности, к размещению и доставке ценных грузов при помощи беспилотных летательных аппаратов (БЛА).
УРОВЕНЬ ТЕХНИКИ
[2] В настоящее время в мире проявляется высокий интерес к развитию инфраструктуры по доставке грузов при помощи беспилотных летательных аппаратов (БЛА). В развитии такого направления доставки принимают широкое участие большинство производителей БЛА и компаний по доставке грузов. Транспортировка еды, товаров и других грузов приобретает широкую популярность в различных отраслях. Так, благодаря БЛА, повышается эффективность и скорость доставки товаров первой необходимости, медикаментов или оборудования в труднодоступные места. Кроме того, БЛА активно внедряются в коммерческую доставку, такую как доставка еды, доставка товаров с различных платформ электронной коммерции и т.д. Это обуславливается тем, что доставка различных грузов при помощи БЛА, по сравнению с традиционными методами доставки, такими как пешая курьерская доставка, курьерская доставка автотранспортом, имеет ряд очевидных преимуществ, в числе которых значительное сокращение штата сотрудников, осуществляющих доставку, автономность доставки, снижение стоимости доставки, повышение скорости доставки, обеспечение доставки в труднодоступные места и т.д.
[3] Для осуществления доставки в настоящий момент применяются 2 основных способа размещения грузов на БЛА. Первый способ заключается в том, что груз крепится на внешней подвеске (тросе) к БЛА. Второй способ заключается в том, что груз размещают во внутренних отсеках БЛА.
[4] К недостаткам таких способов, в одном случае, можно отнести малые габариты транспортируемой посылки (при размещении груза во внутреннем отсеке БЛА), а в другом снижение надежности доставки и маневренности, т.к. при подвеске на тросе высока вероятность повреждения груза об препятствия, затрудняется маневрирование в городской среде, снижается защищенность груза, что является критичным для хрупких и ценных грузов.
[5] Из уровня техники известен адаптер для перевозки грузов, прикрепляемый на БЛА, описанный в патенте Южной Кореи №KR101682574 В1 (CHANG YOON SEOK и др.), опубл. 29.11.2016. Указанный адаптер обеспечивает крепление коробчатых грузов на крестообразную раму адаптера, закрепленную под БЛА. Зажатие коробки в раме осуществляется закручиванием уголков, расположенных на крестообразной раме, имеющей резьбу по всему своему периметру, причем уголки повторяют по форме край коробки и, таким образом, плотно обхватывают все 4 угла верхней части коробки.
[6] К недостаткам такого адаптера можно отнести отсутствие механизмов блокировки груза, обеспечивающих надежность доставки и предотвращающих незаконный доступ к грузу, отсутствие контроля груза во время полета, а также отсутствие возможности перевозить хрупкие и ценные грузы. Кроме того, процесс закрепления груза в таком адаптере занимает много времени и очень трудоемкий.
[7] Из уровня техники также известен адаптер для размещения груза на БЛА, раскрытый в патенте США №US 10435156 В2 (DEUTSCHE POST AG), опубл. 08.10.2019. Указанный адаптер содержит две направляющие прямоугольные рейки с защелкивающимися подпружиненными механизмами, располагающиеся на нижней части БЛА, на которые защелкивается U-образный контейнер, содержащий груз, причем груз фиксируется внутри контейнера сеткой. Выгрузка доставляемого груза осуществляется отсоединением U-образного контейнера посредством давления на подпружиненные защелки и извлечения груза. Для осуществления выгрузки используются специальные разгрузочно-загрузочные конвейеры.
[8] Недостатками такого решения, являются низкая защищенность груза, т.к. отсутствуют механизмы блокировки и контроля груза, невозможность разгрузки вне отведенного места, а также, такого рода решение не обеспечивает целостность груза. Кроме того, указанное решение не приспособлено для доставки ценных или хрупких грузов из-за особенностей конструкции.
[9] Общими недостатками существующих решений в данной области являются отсутствие универсальных автоматизированных адаптеров для размещения ценных и хрупких грузов, имеющих собственные механизмы аутентификации и блокировки груза и обеспечивающих контроль положения груза во время всего цикла доставки. Также такого рода адаптеры должны обеспечивать простоту доступа к грузу и безопасность получателя груза при взаимодействии с указанным адаптером для извлечения груза.
СУЩНОСТЬ ТЕХНИЧЕСКОГО РЕШЕНИЯ
[10] Данное техническое решение направлено на устранение недостатков, присущих существующим решениям, известным из уровня техники.
[11] Технической проблемой (или технической задачей) в данном техническом решении является создание нового адаптера для размещения грузов на беспилотном летательном аппарате (БЛА), обеспечивающего надежную и защищенную доставку груза получателю.
[12] Основным техническим результатом, проявляющимся при решении вышеуказанной задачи, является повышение надежности доставки груза при помощи БЛА.
[13] Еще одним техническим результатом, проявляющимся при решении вышеуказанной задачи, является расширение арсенала технических средств.
[14] Заявленные технические результаты достигаются за счет реализации адаптера для размещения грузового контейнера на беспилотном летательном аппарате (БЛА), представляющего собой раму, выполненную в виде силового каркаса, на которой расположены: амортизаторы, выполненные с возможностью демпфирования колебаний рамы при перемещении БЛА; по меньшей мере один модуль присутствия контейнера, выполненный с возможностью определения требуемого положения установки грузового контейнера в раме и передачи данных на модуль управления; механизм блокировки грузового контейнера, содержащий средство аутентификации получателя груза, и выполненный с возможностью: передачи данных аутентификации, принятых от получателя груза, модулю управления; дистанционной блокировки/разблокировки грузового контейнера, расположенного в раме, при получении сигнала от модуля управления; модуль управления, содержащий систему позиционирования, предназначенную для получения координат местоположения, причем модуль управления выполнен с возможностью: аутентификации получателя груза; получения сигнала от по меньшей мере одного модуля присутствия контейнера; получения сигнала от вибродатчика, контролирующего статус работы двигателя БЛА; формирования статуса проверки параметров блокировки/разблокировки контейнера на основании сигналов, полученных от модуля присутствия контейнера, вибродатчика, системы позиционирования и средства аутентификации; и управления механизмом блокировки грузового контейнера на основании сформированного статуса проверки параметров блокировки/разблокировки контейнера.
[15] В одном из частных вариантов реализации адаптера амортизаторы соединяют раму адаптера для размещения грузового контейнера с силовой конструкцией БЛА.
[16] В другом частном варианте реализации адаптера средство аутентификации пользователя представляет собой средство биометрической аутентификации.
[17] В другом частном варианте реализации адаптера механизм блокировки контейнера представляет собой электромеханический замок.
[18] В другом частном варианте реализации адаптера механизм блокировки контейнера дополнительно выполнен с возможностью ручной блокировки/разблокировки.
[19] В другом частном варианте реализации рама содержит ролики.
[20] В другом частном варианте реализации адаптера по меньшей мере один модуль присутствия контейнера содержит по меньшей мере один датчик, выбранный из группы: контактные датчики, инфракрасные датчики, датчики давления.
[21] В другом частном варианте реализации адаптера по меньшей мере один модуль присутствия контейнера расположен в элементах фиксации контейнера в раме.
[22] В другом частном варианте реализации адаптера модуль управления дополнительно выполнен с возможностью с возможностью обмена данными с сервером, по меньшей мере, о статусе перемещения, данными телеметрии, аутентификационными данными пользователя.
[23] Также, указанные технические результаты достигаются за счет реализации системы для размещения и транспортировки груза при помощи беспилотного летательного аппарата (БЛА), включающей: БЛА с установленным на нем адаптером по любому из пп. 1-9 формулы; грузовой контейнер, установленный в адаптере; сервер, причем БЛА выполнен с возможностью транспортировки грузового контейнера на основании получаемой информации от сервера, при этом упомянутая информация включает в себя по меньшей мере полетное задание и географические координаты точки доставки груза; и отправки данных о статусе полета на сервер; сервер выполнен с возможностью формирования заявки на транспортировку груза, при этом упомянутая заявка содержит по меньшей мере географические координаты точки доставки груза и данные получателя груза; построения полетного маршрута на основании упомянутой заявки, построения полетного задания на основании сформированного полетного маршрута, причем построение полетного задания включает в себя анализ данных метеоусловий на упомянутом маршруте и согласование маршрута полета в центре организации воздушного движения.
[24] В частном варианте реализации системы данные о статусе полета БЛА представляют собой, по меньшей мере, статус перемещения, данные телеметрии, данные остатка ресурса аккумулятора, допустимую скорость полета, высоту полета.
[25] В другом частном варианте реализации системы, полетный маршрут содержит данные о минимальной и максимальной допустимой высоте полета, оптимальную скорость полета, карту ландшафта, маршрут перемещения БЛА.
[26] В другом частном варианте реализации системы, система дополнительно содержит наземный пункт управления (НПУ).
[27] В другом частном варианте реализации системы НПУ выполнен с возможностью ручного управления/корректировки полета БЛА.
[28] В другом частном варианте реализации системы обмен данных БЛА с сервером осуществляется с помощью средства приемо-передачи данных, установленном на БЛА.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
[29] Признаки и преимущества настоящего изобретения станут очевидными из приводимого ниже подробного описания изобретения и прилагаемых чертежей, на которых:
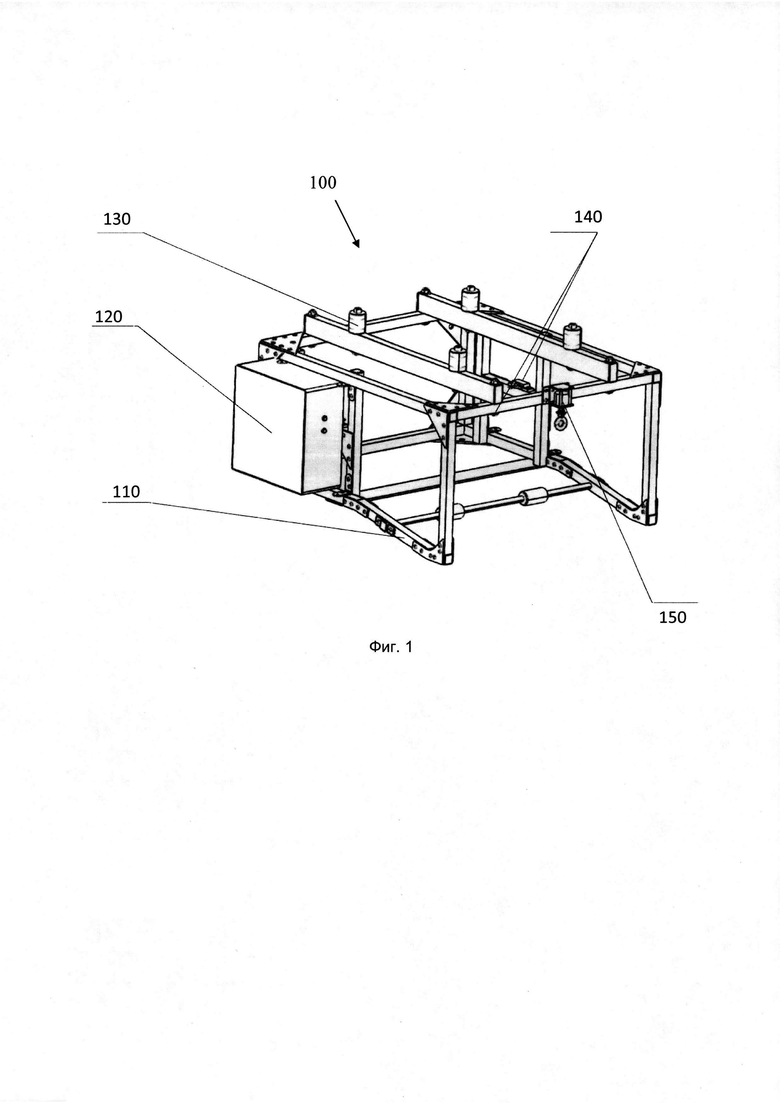
[30] Фиг. 1 иллюстрирует общий вид конструкции адаптера для размещения грузового контейнера на БЛА.
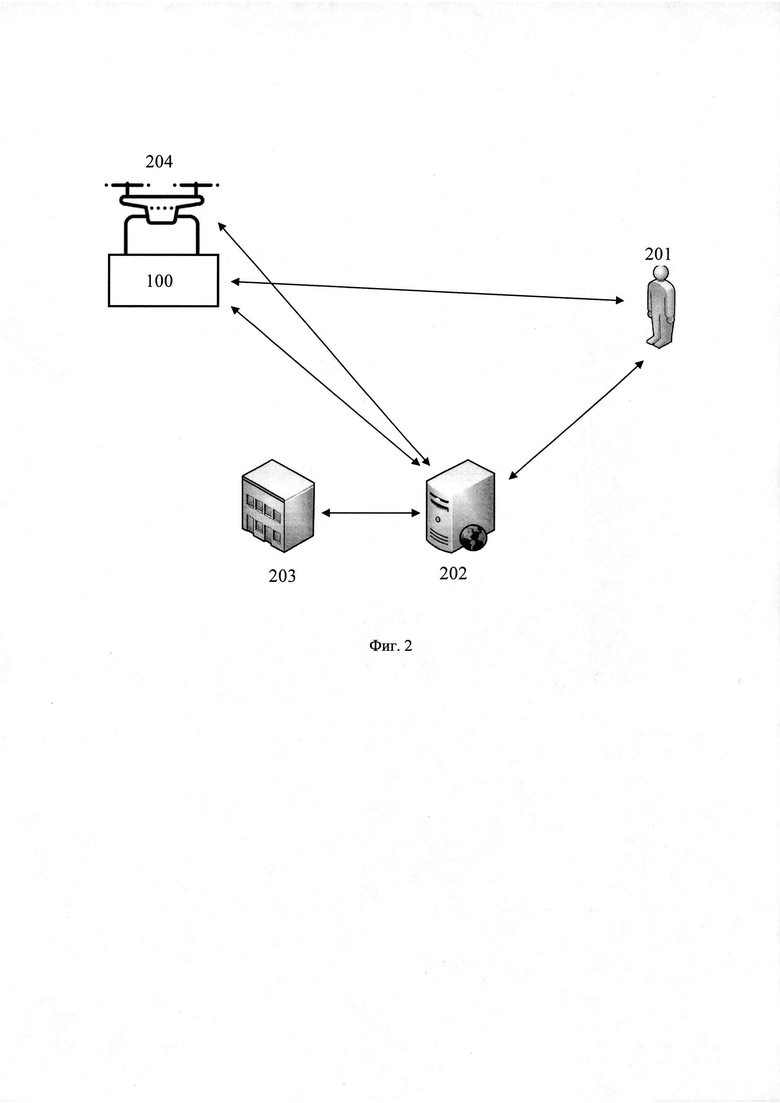
[31] Фиг. 2 иллюстрирует общую схему системы для размещения и транспортировки груза при помощи БЛА.
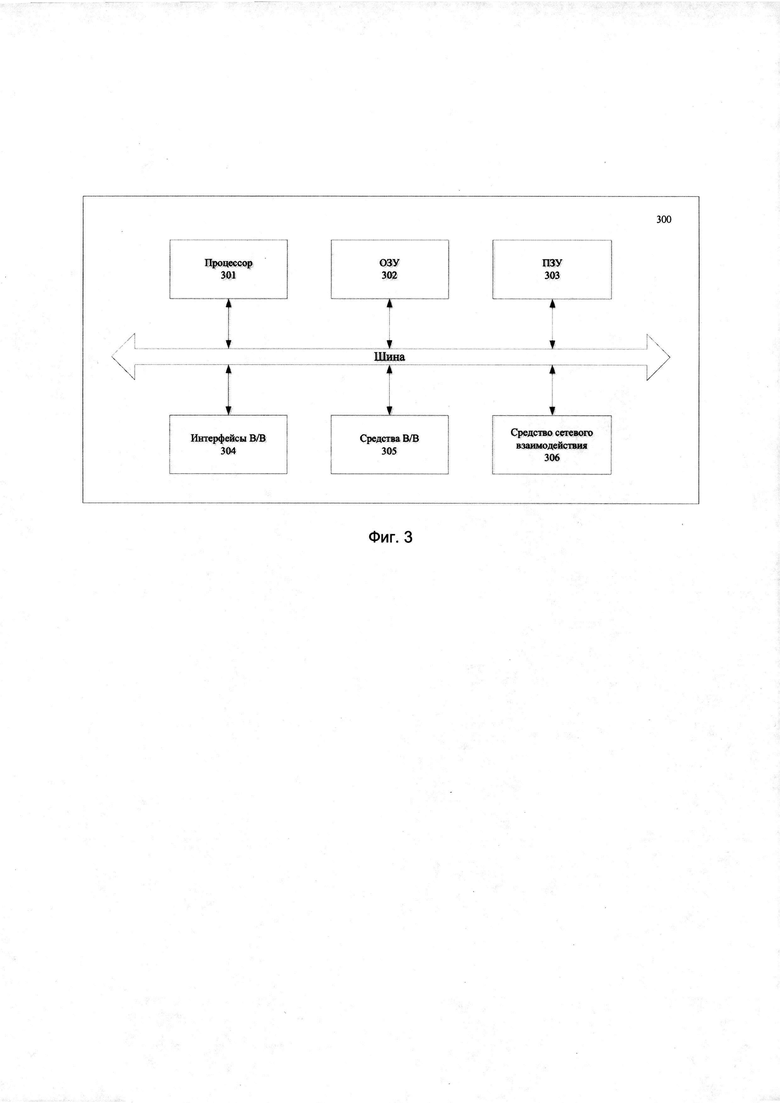
[32] Фиг. 3 иллюстрирует общий вид вычислительного устройства, для реализации системы.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[33] Заявленное решение позволяет размещать в адаптере ценные и/или хрупкие грузы, осуществлять безопасную и надежную транспортировку ценных и/или хрупких грузов при помощи БЛА, предотвращать несанкционированный доступ к грузу, обеспечивать безопасное извлечение груза из адаптера получателями, обеспечивать независимую и автономную аутентификацию (даже при отсутствии связи с сервером), посредством адаптера, при получении груза.
[34] На Фиг. 1 представлен общий вид конструкции адаптера 100. Указанный адаптер 100 предназначен для размещения контейнера с хрупким и/или ценным грузом на БЛА. Адаптер 100 состоит из рамы 110, на которой располагаются модуль управления 120, амортизаторы 130, модули присутствия контейнера 140 и механизм блокировки контейнера 150.
[35] Рама 110 представляет собой пространственную силовую конструкцию, изготовленную из ударопрочных и антивандальных конструкционных профилей, скрепленных между собой фрезерованными накладками. В качестве материалов для изготовления рамы могут использоваться, например, металл, карбон, титан, графен, стеклолит и т.д. Рама 110 может изготавливаться как в виде параллелепипеда, так и в виде других геометрических фигур (сфера, цилиндр и т.д.). Форма и размер рамы 110 могут выбираться в зависимости от габаритов и формы транспортируемого груза, а также полезной нагрузки БЛА к которому крепится указанная рама 110. Так, например, при необходимости доставки картины, зеркала, оконной рамы и т.д., целесообразнее использовать форму параллелепипеда, однако при доставке предметов сферообразной формы, для уменьшения веса рамы 110, а следовательно и увеличения полезной нагрузки БЛА, целесообразнее выбирать сферообразную форму рамы 110. Настоящий вариант реализации описывает раму 110, выполненную в виде параллелепипеда. В конкретном варианте реализации рама 110, также, может выполнять функцию шасси при посадке БЛА. В одном варианте осуществления на основании рамы располагаются накладки, предназначенные для смягчения посадки. В качестве насадок могут использоваться любые материалы, гасящие силу удара, например, резина, полиуретан и т.д. Кроме того, в еще одном частном варианте реализации, рама 110 может быть оснащена роликами для простоты извлечения устанавливаемого в нее контейнера с грузом.
[36] На раме 110 расположен модуль управления 120. Указанный модуль 120 предназначен для управления механизмом блокировки 150, получения сигналов от по меньшей мере одного модуля присутствия 140, получения сигналов от вибродатчика, обработки указанных сигналов, аутентификации получателя груза, формирования статуса проверки параметров блокировки/разблокировки, а также для взаимодействия и обмена данными с внешними устройствами, такими как контроллер управления БЛА, наземный пункт управления (НПУ), сервер и т.д. Кроме того, модуль 120, также, выполнен с возможностью собирать данные телеметрии и формировать статус перемещения на основе собранных данных. Под данными телеметрии в конкретном варианте осуществления понимаются, по меньшей мере, данные о местоположении адаптера 100 в конкретный момент времени (включая географические координаты и высоту над уровнем моря), данные об уровне колебаний и угле наклона адаптера 100 в момент перемещения БЛА, данные о скорости перемещения. Однако специалисту, очевидно, что может быть собран любой тип данных в зависимости от функциональных возможностей измерительных средств в адаптере 100.
[37] Модуль управления 120 может являться бортовым вычислителем, контроллером, микроконтроллером и т.д., предназначенным для выполнения предписанных ему функций посредством программно-аппаратной части. Модуль управления 120 может содержать источник питания, АЦП, средство беспроводной передачи данных. В качестве средства беспроводной передачи данных может использоваться GSM модем, GPRS модем, LTE модем, 5G модем, модуль спутниковой связи, NFC модуль, Bluetooth и/или BLE модуль, Wi-Fi модуль, LoRaWAN модуль и др. Дополнительно, модуль 120 содержит систему позиционирования, например, GPS, ГЛОНАСС, BeiDou, Galileo.
[38] Амортизаторы 130 соединяют адаптер 100 с силовой конструкцией БЛА. Указанные амортизаторы 130 обеспечивают демпфирование колебаний адаптера 100, возникающих во время полета БЛА. В одном варианте осуществления для соединения рамы 110 с силовой конструкцией БЛА используется, по меньшей мере, 4 амортизатора, однако специалисту в данной области техники очевидно, что в зависимости от размеров БЛА и размеров и формы адаптера 100, может быть выбрано любое приемлемое количество амортизаторов 130 для демпфирования колебаний. Кроме того, амортизаторы 130 позволяют осуществлять посадку БЛА с адаптером 100 в местах с неровным ландшафтом, например, при посадке на наклонную поверхность. В качестве амортизаторов 130 может использоваться любое демпфирующее устройство, гасящее механические колебания, например, гидравлические рычажные амортизаторы, гидравлические двухтрубные амортизаторы, гидравлические однотрубные амортизаторы, газовые амортизаторы и т.д.
[39] Кроме того, адаптер 100 содержит модули присутствия контейнера 140. Модули 140 располагаются на внутренней части рамы 110 в элементах фиксации контейнера. Элементы фиксации контейнера представляют собой углубления или вырезы в профилях рамы 110, предназначенные для надежной установки контейнера в адаптер 110, Модули 140 выполнены с возможностью отправки сигнала на модуль 120, при определении правильного/неправильного положения установки контейнера в адаптер 100. В качестве модулей 140 могут использоваться, например, контактные датчики, датчики света, оптические инфракрасные датчики и т.д. В одном варианте осуществления для корректного определения правильности установки контейнера в адаптер 100 требуется, по меньшей мере, два модуля присутствия 140, располагающиеся в начале и в конце рамы 110. Однако, очевидно, что для повышения точности определения правильности установки, могут использоваться и большее количество модулей 140. Например, в еще одном варианте осуществления изобретения в раме 110 располагается по меньшей мере четыре модуля 140 в местах контакта каждого из углов контейнера. Определение правильности установки контейнера в адаптер 100 происходит посредством считывания давления, оказываемого контейнером, на модуль 140. Так, при неправильной установке контейнера (перекос относительно горизонтальной оси), в модулях 140 будет создаваться разная сила давления, что будет свидетельствовать о неправильной установке и будет отправлен сигнал на модуль управления 120. Сигнал о правильной установке также отправляется на модуль 120.
[40] Механизм блокировки 150 обеспечивает запирание контейнера в адаптере 100. Механизм блокировки 150 выполнен с возможностью получения управляющих сигналов от модуля 120 на блокировку/разблокировку. Механизмом блокировки может являться, например, электромеханический замок, электронный замок, и т.д. В одном варианте осуществления механизм блокировки также содержит средство ввода аутентификационной информации получателя груза. Средством ввода может являться, не ограничиваясь, дисплей, микрофон, сканер отпечатков пальцев, камера, клавиатура и т.д. Указанное средство ввода аутентификационной информации может обеспечивать ввод аутентификационной информации с помощью ввода пароля на дисплее, произнесения фразы как текстозависимой (произнесения контрольной фразы с экрана), так и текстонезависимой (произнесения произвольного текста), например, биометрический образец голоса, демонстрации лица пользователя (биометрический образец лица), прикладывания к соответствующему сенсору пальца, ладони и/или ключевого носителя, сканирование сетчатки глаза. После получения аутентификационной информации, указанная информация передается на модуль 120 для дальнейшей процедуры аутентификации. В одном варианте осуществления электромеханический замок выполнен с возможностью ручной блокировки/разблокировки.
[41] Теперь рассмотрим сценарий блокировки контейнера с грузом в адаптере 100. После размещения контейнера с грузом в адаптере 100 на модуль управления 120 поступает сигнал на блокировку от внешнего устройства. Модуль 120 опрашивает по меньшей мере один модуль присутствия 140. На основе принятых сигналов от модуля 140, модуль 120 определяет правильно/неправильно (корректно/некорректно) установлен контейнер с грузом в элементах фиксации контейнера, которые расположены на раме 110 и подает сигнал о готовности к блокировке механизма 150/сигнал об ошибке на внешнее устройство. Так, например, при получении сигнала со всех модулей присутствия 140, модуль 120 определяет, что контейнер установлен в правильном положении. Аналогично, если хотя бы один из модулей 140 не подает сигнал, модуль 120 определяет, что контейнер установлен неправильно. Стоит также отметить, что количество модулей 140 выбирается в зависимости от количества элементов фиксации контейнера в раме 110.
[42] Внешним устройством может являться персональный компьютер, сервер, смартфон, планшет, носимое умное устройство и т.д. В одном варианте осуществления дополнительно к передачи модулем 120 сигнала о готовности к блокировке/ошибке блокировки механизма 150 на внешнее устройство, модуль 120, также, выполнен с возможностью оповещения о готовности/неготовности к блокировке непосредственно через средства оповещения, располагающиеся на раме 110. Средством оповещения может являться средство отображения графического пользовательского интерфейса (дисплей), средство оповещения голосового пользовательского интерфейса (динамики), микрофонный массив, индикаторная лампа и т.д. В еще одном варианте осуществления оповещение может производиться через средства ввода аутентификационной информации, такие как дисплей, динамики, индикаторная лампа и т.д., которые располагаются в механизме 150.
[43] Контейнер с грузом размещается в адаптере 100, например, при помощи загрузочного механизма, позволяющего в автоматизированном режиме произвести загрузку адаптера 100 БЛА требуемым грузом, например, конвейерная лента. Кроме того, загрузка контейнера в адаптер 100 может производиться человеком. Различные способы загрузки грузов на БЛА известны из уровня техники и широко используются в настоящее время.
[44] Контейнер может представлять собой металлический контейнер, пластиковый контейнер и т.д. Основным требованием к таким контейнерам является их изготовление из ударопрочных материалов и наличие внутреннего пространства для размещения требуемого груза. Так, например, доступ к внутреннему пространству может осуществляться через дверцы контейнера или раздвигающуюся заслонку и т.д. Указанные контейнеры должны быть совместимыми с элементами фиксации контейнера в раме 110, т.е. пазы контейнера при установке в адаптер 100 должны совпадать с элементами фиксации контейнера в раме 110. Кроме того, для повышения сохранности груза, внутренний отсек контейнера, куда помещается груз, может иметь, например, сетку, предназначенную для фиксации груза, стропы, ложемент, прижимной механизм и т.д. Также, контейнер может быть заполнен мягким материалом, противоударным гелем и т.д.
[45] Если установка контейнера была произведена правильно (корректно), то модуль 120 отправляет сигнал о готовности к блокировке механизма 150 на внешнее устройство и средства оповещения. После чего, внешнее устройство подает сигнал о блокировке механизма 150 и происходит его блокировка.
[46] Если модуль 120 определил некорректную (неправильную) установку контейнера, то указанный модуль 120 передает сигнал об ошибке и невозможности блокировки механизма 150 на внешнее устройство. Модуль 120, также выполнен с возможностью оповещения об ошибке через средства оповещения, которые описывались выше. Сигнал об ошибке транслируется до момента устранения нарушения, связанного с некорректной установкой контейнера. После устранения нарушения, модуль 120 передает сигнал о готовности к блокировке механизма 150 на внешнее устройство и средства оповещения и ожидает от внешнего устройства сигнала на блокировку механизма 150. В качестве сигнала об ошибке может передаваться сообщение на внешнее устройство и/или средство оповещения о необходимости проверки корректности установки контейнера и повторении процедуры установки контейнера в элементы фиксации.
[47] Далее рассмотрим сценарий разблокировки контейнера с грузом и извлечение груза получателем. После того, как контейнер с грузом был заблокирован в адаптере 100, модуль управления 120 получает от внешнего устройства данные о доставке, которые содержат, по меньшей мере, географические координаты точки доставки груза и данные получателя груза, включающие аутентификационную информацию. Указанные данные могут извлекаться из заявки на перевозку груза, заполняемую заказчиком на сервере, вебсайте и т.д. При достижении БЛА точки доставки, модуль 120 осуществляет формирование статуса проверки параметров, необходимых для разблокировки контейнера. Статус проверки параметров разблокировки содержит проверку географических координат, проверку работы двигателя БЛА, аутентификацию получателя. Кроме того, во время перемещения БЛА с адаптером 100, модуль 120 выполнен с возможностью транслирования данных о статусе перемещения адаптера 100. Под статусом перемещения понимается набор данных, собираемый измерительными средствами на указанном адаптере 100. Так, например, во время полета БЛА, модуль 120 выполнен с возможностью транслирования на сервер текущей скорости перемещения, высоты полета, географических координат, угла наклона адаптера 100, уровня колебаний, возникающий во время полета в адаптере 100. Угол наклона адаптера 100 относительно горизонтальной оси может измеряться встроенным в модуль 120 гироскопом. При превышении угла наклона и уровня колебаний адаптера 100, способных привести к деформации/разбитию груза, модуль 120 выполнен с возможностью отправки предупреждающего сигнала на сервер для корректировки маршрута и характеристик полета БЛА.
[48] Проверка географических координат осуществляется модулем 120, при помощи собственной системы позиционирования. В момент приземления БЛА, модуль 120, получает от собственной системы позиционирования географические координаты, включающие, по меньшей мере, широту, долготу, высоту над уровнем моря, и сравнивает полученные координаты с географическими координатами, которые были указаны в заявке на перевозку груза. Более подробно, модуль 120 сравнивает высоту над уровнем моря, широту и долготу, с высотой над уровнем моря, широтой и долготой, которые указаны в заявке на перевозку груза.
[49] Если полученные географические координаты совпадают с указанными географическими координатами в заявке на перевозку груза, то модуль 120 формирует положительный статус проверки географических координат и переходит к проверке следующего статуса - статуса работы двигателя БЛА. Указанная проверка осуществляется посредством опроса, при помощи модуля 120, вибродатчика, располагающегося либо на БЛА, либо непосредственно на адаптере 100. В одном варианте осуществления, вибродатчик может быть размещен на раме 110, адаптера 100 или может являться, например, встроенным в модуль 120. Для специалиста очевидно, что местоположение датчика должно выбираться таким образом, чтобы он корректно мог определять работу двигателя БЛА. Как правило, вибродатчик подключается к модулю 120 через АЦП, однако, для специалиста очевидно, что модуль 120 может получать сигналы с вибродатчика и беспроводным способом (IoT, LoRaWAN, LPWAN и т.д.). Модуль 120 сравнивает частотный спектр уровня вибраций, полученных от вибродатчика, с частотным спектром работающего двигателя, и, на основе результатов сравнения принимает решение о том, запущен двигатель или нет. Так, при отличии спектров, модуль 120 формирует статус работы двигателя как выключенный и подает сигнал оповещения, через средства оповещения, о том, что получатель груза может приблизиться к БЛА и продолжить получение груза. Также, при совпадении частотных спектров, модуль 120, выполнен с возможностью оповещения, при помощи средств оповещения, описанных выше, получателя груза о соблюдении безопасного расстояния до БЛА до момента деактивации двигателя.
[50] Аутентификация получателя груза происходит в модуле 120. Получатель груза отправляет свою аутентификационную информацию, через средства ввода аутентификационной информации которые описывались выше, на модуль 120. В модуле 120 уже хранятся эталонные данные аутентификации получателя груза, извлеченные из заявки на перевозку груза. Далее указанный модуль 120 производит аутентификацию, путем сравнения эталонной информации о получателе груза с той, которую непосредственно получили в текущий момент от получателя. И, при успешной аутентификации, формирует статус аутентификации как успешный. Такая процедура аутентификации исключает ситуации, когда связь с сервером прерывается и получатель не может извлечь доставленный ему груз. Однако, для специалиста очевидно, что аутентификация может происходить и в режиме реального времени на сервере. Для реализации такого варианта осуществления настоящего решения, модуль 120 выполнен с возможностью передавать данные аутентификации, полученные от средства ввода аутентификационной информации на сервер и получать статус аутентификации от сервера.
[51] На основе сформированного статуса проверки параметров для разблокировки контейнера, а именно статуса аутентификации, статуса работы двигателя, статуса проверки географических координат, модуль 120 производит разблокировку механизма 150, посредством отправки сигнала о разблокировке механизма 150, что позволяет извлечь груз из адаптера 100. Как упоминалось выше, сигнал на разблокировку контейнера, посредством разблокировки механизма 150, может быть отправлен внешним устройством, однако такой сигнал на разблокировку не исключает статус проверки параметров для разблокировки контейнера. В одном варианте осуществления, механизм 150 может быть разблокирован посредством механического ключа, но такие ключи имеют только операторы по перевозке грузов, например, транспортная компания, и они применяются только в экстренных ситуациях.
[52] Однако, если при формировании статуса проверки параметров блокировки, по меньшей мере, один параметр не проходит проверку (неуспешный статус проверки), модуль 120 не пропускает сигнал на разблокировку контейнера. Кроме того, модуль 120 также выполнен с возможностью отправки сигнала тревоги на внешнее устройство при превышении количества попыток аутентификации и/или превышении времени нахождения в состоянии покоя вне заданных географических координат доставки.
[53] Так, например, при внезапном выходе из строя БЛА и, соответственно, потери связи с указанным БЛА, адаптер 100, на основе статуса проверки параметров блокировки определит, что он находится в состоянии покоя в географической точке, отличной от точки доставки и подаст сигнал тревоги на внешнее устройство, аналогичный сигнал тревоги может быть подан при превышении количества попыток аутентификации. Например, при ожидании БЛА с адаптером 100 получателя груза в месте скопления людей груз могут попытаться незаконно извлечь из адаптера 100.
[54] Посредством формирования статуса проверки параметров разблокировки и определения положения контейнера при его блокировке, а также амортизаторов, адаптер 100 обеспечивает защищенную и надежную транспортировку хрупких и/или ценных грузов и безопасное извлечение груза получателями, за счет запрета на открытие указанного адаптера 100 при работающем двигателе и/или неуспешной аутентификации и/или неверной точке доставки, а также за счет демпфирования колебаний, возникающих во время полета БЛА. Кроме того, возможность автономной аутентификации, посредством адаптера 100, обеспечивает извлечение груза даже при отсутствии связи с сервером.
[55] Теперь рассмотрим систему 200 для размещения и транспортировки хрупких и ценных грузов, описанную на Фиг. 2. Получатель груза 201 создает заявку на перевозку (транспортировку) груза. Заявка может быть создана на сервере 202 посредством сетевого взаимодействия получателя груза 201 с сервером 202, например, через веб-интерфейс, приложение и т.д. Стоит отметить, что получатель груза 201 и заказчик груза физически могут быть разными людьми. Так, например, если получатель груза 201 является покупателем в интернет магазине, а заказчиком на перевозку груза к транспортной компании является сам интернет магазин, то заказчик в этом случае собирает данные получателя и отправляет их в транспортную компанию. Для удобства понимания вариантов осуществления, изложенных ниже, заказчик и получатель 201 являются одним человеком. Указанная заявка должна содержать, по меньшей мере, географические координаты точки доставки груза, информацию о грузе и данные получателя груза. Под данными получателя груза могут пониматься биометрические данные для аутентификации, в частности, отпечаток пальца, ладони, изображение лица, образец голоса, кодовое слово и т.д.
[56] Далее сервер 202, на основе заявки, выбирает ближайший пункт загрузки грузов, осуществляющий загрузку грузов в адаптер 100 БЛА 204, в котором находится требуемый груз. Как уже упоминалось выше, в качестве пункта загрузки могут использоваться склады, пункты выдачи товаров, автоматизированные загрузочные хранилища и т.д. Кроме того, пункт загрузки выбирается исходя из мксимально допустимой дальности полета БЛА 204 с заполненным адаптером 100.
[57] После выбора пункта загрузки, сервер 202 осуществляет построение полетного маршрута от выбранного пункта до географических координат точки доставки. Для построения полетного маршрута, выбирается минимальная и максимальная допустимая высота полета на участке доставки, выбирается наиболее оптимальная средняя высота полета, составляется карта ландшафта, рассчитывается расстояние от пункта загрузки до получателя груза, строится маршрут от точки загрузки до географических координат получателя груза с учетом анализа карты ландшафта.
[58] В одном варианте осуществления, сервер 202, также, на основе информации о грузе и расстояния до получателя груза (дальности полета от пункта загрузки до получателя) осуществляет подбор БЛА 204. Подбор БЛА 204 может осуществляться из доступных на пункте загрузки БЛА 204, подходящих под характеристики груза и способных долететь до получателя груза. Так, например, на основе характеристик груза (масса, габариты) выбирается БЛА 204 с размерами адаптера 100 и общей полезной нагрузкой больше чем в указанной заявке. При отсутствии такого БЛА на указанном пункте загрузки, сервер 202 может выбрать соседний пункт загрузки с доступным там БЛА, соответствующим запрошенным характеристикам.
[59] Кроме того, сервер 202, на основе построенного полетного маршрута формирует полетное задание. Для формирования полетного задания используются данные с геоинформационной системы о метеоусловиях на построенном полетном маршруте, а также взаимодействие с центром организации воздушного движения (ОРВД). На основе данных о метеоусловиях сервер 202 может скорректировать или одобрить полетный маршрут.Далее сервер 202 отправляет полетный маршрут на согласование в центр организации воздушного движения. Центр организации воздушного движения (ОРВД) одобряет/корректирует полетный маршрут и отправляет его обратно на сервер 202. ОРВД может сравнивать карту полета БЛА 204 с разрешенными зонами полета, и, если карта построена над закрытой для полетов зоной, отправлять запрос на корректировку полетного маршрута.
[60] После согласования маршрута ОРВД и сопоставления с данными о метеоусловиях на выбранном маршруте формируется полетное задание, включающее все внесенные корректировки и изменения в полетном маршруте. Так, например, полетное задание может включать утвержденную ОРВД карту полета с учетом метеоусловий на указанной карте, включающую маршрут перемещения БЛА 204, требуемую скорость, высоту полета и т.д.
[61] Далее сервер 202 отправляет подтвержденный маршрут и географические координаты точки доставки как полетное задание на БЛА 204 для исполнения.
[62] Во время исполнения полетного задания БЛА 204 транслирует данные телеметрии. Данными телеметрии могут являться статус перемещения, остаток ресурса аккумулятора либо запаса топлива, высота, скорость, значения углов полета и т.д.
[63] Кроме того, в одном варианте осуществления адаптер 100 в процессе полета БЛА 204, параллельно с данными телеметрии БЛА 204 передает свои данные телеметрии на сервер 202, данными телеметрии адаптера 100 могут являться колебания, возникающие в процессе полета. При превышении допустимого уровня колебаний, модуль 120 адаптера 100 выполнен с возможностью отправки запроса на сервер 202 на совершение действий по снижению колебаний. Также, модуль 120 выполнен с возможностью передачи сигнала тревоги и запроса на корректировку полетного задания БЛА 204 при возникновении экстренной ситуации. Сигнал тревоги может быть передан как непосредственно на сервер 202, так и в наземный пункт управления 203 (НПУ). Экстренной ситуацией может являться, например, совершение атаки на адаптер 100, БЛА 204 и т.д.
[64] При достижении географических координат точки доставки, БЛА 204 осуществляет посадку. В одном варианте осуществления, БЛА 204 анализирует ландшафт, а также плотность людей (при доставке в городских условиях) и, на основе данных анализа совершает посадку. Анализ может производится средствами БЛА 204, такими как камера.
[65] В еще одном варианте осуществления система 200 содержит также наземный пункт управления 203 (НПУ). НПУ 203 предназначен для управления БЛА 204 в случае получения сигнала тревоги или возникновения нештатной ситуации. Кроме того, НПУ 203 также может осуществлять ручную посадку/взлет в местах со сложным ландшафтом.
[66] После осуществления посадки БЛА 204 в заданной точке доставки, получатель груза 201 выполняет разблокировку адаптера 100 и извлекает груз, выполняя сценарий разблокировки и получения груза, который описывался выше.
[67] На Фиг. 3 представлен пример общего вида вычислительного устройства (300), для реализации системы (200).
[68] В общем случае, вычислительное устройство (300) содержит объединенные общей шиной информационного обмена один или несколько процессоров (301), средства памяти, такие как ОЗУ (302) и ПЗУ (303), интерфейсы ввода/вывода (304), устройства ввода/вывода (1105), и устройство для сетевого взаимодействия (306).
[69] Процессор (301) (или несколько процессоров, многоядерный процессор и т.п.) может выбираться из ассортимента устройств, широко применяемых в настоящее время, например, таких производителей, как: Intel™, AMD™, Apple™, Samsung Exynos™, MediaTEK™, Qualcomm Snapdragon™ и т.п. Под процессором или одним из используемых процессоров в устройстве (300) также необходимо учитывать графический процессор, например, GPU NVIDIA или Graphcore, тип которых также является пригодным для полного или частичного выполнения исполнения системы (200), а также может применяться для обучения и применения моделей машинного обучения в различных информационных системах.
[70] ОЗУ (302) представляет собой оперативную память и предназначено для хранения исполняемых процессором (301) машиночитаемых инструкций для выполнения необходимых операций по логической обработке данных. ОЗУ (302), как правило, содержит исполняемые инструкции операционной системы и соответствующих программных компонент (приложения, программные модули и т.п.). При этом, в качестве ОЗУ (302) может выступать доступный объем памяти графической карты или графического процессора.
[71] ПЗУ (303) представляет собой одно или более устройств постоянного хранения данных, например, жесткий диск (HDD), твердотельный накопитель данных (SSD), флэш-память (EEPROM, NAND и т.п.), оптические носители информации (CD-R/RW, DVD-R/RW, BlueRay Disc, MD) и др.
[72] Для организации работы компонентов вычислительного устройства (300) и организации работы внешних подключаемых устройств применяются различные виды интерфейсов В/В (304). Выбор соответствующих интерфейсов зависит от конкретного исполнения вычислительного устройства, которые могут представлять собой, не ограничиваясь: PCI, AGP, PS/2, IrDa, FireWire, LPT, COM, SATA, IDE, Lightning, USB (2.0, 3.0, 3.1, micro, mini, type C), TRS/Audio jack (2.5, 3.5, 6.35), HDMI, DVI, VGA, Display Port, RJ45, RS232 и т.п.
[73] Для обеспечения взаимодействия пользователя с вычислительным устройством (300) применяются различные средства (305) В/В информации, например, клавиатура, дисплей (монитор), сенсорный дисплей, тач-пад, джойстик, манипулятор мышь, световое перо, стилус, сенсорная панель, трекбол, динамики, микрофон, средства дополненной реальности, оптические сенсоры, планшет, световые индикаторы, проектор, камера, средства биометрической идентификации (сканер сетчатки глаза, сканер отпечатков пальцев, модуль распознавания голоса) и т.п.
[74] Средство сетевого взаимодействия (306) обеспечивает передачу данных посредством внутренней или внешней вычислительной сети, например, Интранет, Интернет, ЛВС и т.п. В качестве одного или более средств (306) может использоваться, но не ограничиваться: Ethernet карта, GSM модем, GPRS модем, LTE модем, 5G модем, модуль спутниковой связи, NFC модуль, Bluetooth и/или BLE модуль, Wi-Fi модуль и др.
[75] Представленные материалы заявки раскрывают предпочтительные примеры реализации технического решения и не должны трактоваться как ограничивающие иные, частные примеры его воплощения, не выходящие за пределы испрашиваемой правовой охраны, которые являются очевидными для специалистов соответствующей области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ БЛОКИРОВКОЙ И РАЗБЛОКИРОВКОЙ И СПОСОБ УПРАВЛЕНИЯ БЛОКИРОВКОЙ И РАЗБЛОКИРОВКОЙ | 2018 |
|
RU2695709C1 |
| СИСТЕМА АДМИНИСТРИРОВАНИЯ БАГАЖА И СПОСОБ АДМИНИСТРИРОВАНИЯ БАГАЖА | 2018 |
|
RU2720930C1 |
| СИСТЕМА И СПОСОБ СОВМЕСТНОГО ИСПОЛЬЗОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2715664C1 |
| Система доставки груза на место проведения горнодобывающим субъектом взрывных работ (варианты) | 2024 |
|
RU2840365C1 |
| Система доставки груза горнодобывающим субъектом на место проведения взрывных работ (варианты) | 2024 |
|
RU2839710C1 |
| СИСТЕМА ОТСЛЕЖИВАНИЯ И СПОСОБ МОНИТОРИНГА И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ОТПРАВЛЕНИЙ | 2018 |
|
RU2788582C2 |
| Контейнер-трансформер (SmartBoxCity) | 2020 |
|
RU2725576C1 |
| АВТОМАТИЧЕСКИЙ МУЛЬТИРОТОРНЫЙ АППАРАТ ТРАНСПОРТЕР ДЛЯ ОПЕРАТИВНОЙ ДОСТАВКИ МЕДИКАМЕНТОВ, ПРОДОВОЛЬСТВИЯ И ДРУГОГО ГРУЗА ЧЕРЕЗ ОПАСНУЮ ДЛЯ ЧЕЛОВЕКА ЗОНУ | 2020 |
|
RU2736604C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ КЛЮЧЕВОЙ ИНФОРМАЦИЕЙ, СПОСОБ УПРАВЛЕНИЯ КЛЮЧЕВОЙ ИНФОРМАЦИЕЙ И ЭНЕРГОНЕЗАВИСИМЫЙ МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ | 2018 |
|
RU2708943C1 |
| СИСТЕМА ДОСТАВКИ ГРУЗА | 2018 |
|
RU2689643C1 |
Группа изобретений относится к адаптеру для размещения грузового контейнера на беспилотном летательном аппарате (БЛА) и системе для размещения и транспортировки груза при помощи БЛА. Адаптер содержит раму, выполненную в виде силового каркаса, на которой расположены амортизаторы, выполненные с возможностью демпфирования колебаний рамы при перемещении БЛА, модуль (модули) присутствия контейнера, механизм блокировки грузового контейнера, содержащий средство аутентификации получателя груза, выполненное определенным образом. Система содержит БЛА с установленным на нем адаптером, грузовой контейнер, сервер. Обеспечивается повышение надежности доставки груза при помощи БЛА. 2 н. и 13 з.п. ф-лы, 3 ил.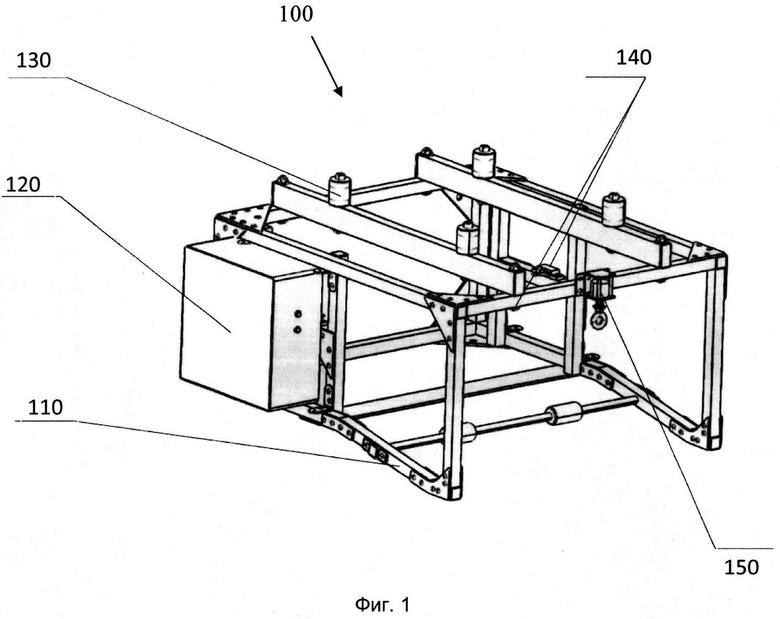
1. Адаптер для размещения грузового контейнера на беспилотном летательном аппарате (БЛА), представляющий собой раму, выполненную в виде силового каркаса, на которой расположены:
- амортизаторы, выполненные с возможностью демпфирования колебаний рамы при перемещении БЛА;
- по меньшей мере один модуль присутствия контейнера, выполненный с возможностью определения требуемого положения установки грузового контейнера в раме и передачи данных на модуль управления;
- механизм блокировки грузового контейнера, содержащий средство аутентификации получателя груза, и выполненный с возможностью:
 передачи данных аутентификации, принятых от получателя груза, модулю управления;
передачи данных аутентификации, принятых от получателя груза, модулю управления;
дистанционной блокировки/разблокировки грузового контейнера, расположенного в раме, при получении сигнала от модуля управления;
- модуль управления, содержащий систему позиционирования, предназначенную для получения координат местоположения, причем модуль управления выполнен с возможностью:
аутентификации получателя груза;
получения сигнала от по меньшей мере одного модуля присутствия контейнера;
получения сигнала от вибродатчика, контролирующего статус работы двигателя БЛА;
формирования статуса проверки параметров блокировки/разблокировки контейнера на основании сигналов, полученных от модуля присутствия контейнера, вибродатчика, системы позиционирования и средства аутентификации; и
управления механизмом блокировки грузового контейнера на основании сформированного статуса проверки параметров блокировки/разблокировки контейнера.
2. Адаптер по п. 1, характеризующийся тем, что амортизаторы соединяют раму адаптера для размещения грузового контейнера с силовой конструкцией БЛА.
3. Адаптер по п. 1, характеризующийся тем, что средство аутентификации пользователя представляет собой средство биометрической аутентификации.
4. Адаптер по п. 1, характеризующийся тем, что механизм блокировки контейнера представляет собой электромеханический замок.
5. Адаптер по п. 1, характеризующийся тем, что механизм блокировки контейнера дополнительно выполнен с возможностью ручной блокировки/разблокировки.
6. Адаптер по п. 1, характеризующийся тем, что рама содержит ролики.
7. Адаптер по п. 1, характеризующийся тем, что по меньшей мере один модуль присутствия контейнера содержит по меньшей мере один датчик, выбранный из группы: контактные датчики, инфракрасные датчики, датчики давления.
8. Адаптер по п. 7, характеризующийся тем, что по меньшей мере один датчик расположен в элементах фиксации контейнера в раме.
9. Адаптер по п. 1, характеризующийся тем, что модуль управления дополнительно выполнен с возможностью обмена данными с сервером по меньшей мере о статусе перемещения, данными телеметрии, аутентификационными данными пользователя.
10. Система для размещения и транспортировки груза при помощи беспилотного летательного аппарата (БЛА), включающая:
- БЛА с установленным на нем адаптером по любому из пп. 1-9;
- грузовой контейнер, установленный в адаптере;
- сервер
причем
- БЛА выполнен с возможностью
транспортировки грузового контейнера на основании получаемой информации от сервера, при этом упомянутая информация включает в себя по меньшей мере полетное задание и географические координаты точки доставки груза; и
отправки данных о статусе полета на сервер;
- сервер выполнен с возможностью
формирования заявки на транспортировку груза, при этом упомянутая заявка содержит по меньшей мере географические координаты точки доставки груза и данные получателя груза;
построения полетного маршрута на основании упомянутой заявки,
построения полетного задания на основании сформированного полетного маршрута, причем построение полетного задания включает в себя анализ данных метеоусловий на упомянутом маршруте и согласование маршрута полета в центре организации воздушного движения.
11. Система по п. 10, характеризующаяся тем, что данные о статусе полета БЛА представляют собой по меньшей мере статус перемещения, данные телеметрии, данные остатка ресурса аккумулятора, допустимую скорость полета, высоту полета.
12. Система по п. 10, характеризующаяся тем, что полетный маршрут содержит данные о минимальной и максимальной допустимой высоте полета, оптимальную скорость полета, карту ландшафта, маршрут перемещения БЛА.
13. Система по п. 10, характеризующаяся тем, что дополнительно содержит наземный пункт управления (НПУ).
14. Система по п. 10, характеризующаяся тем, что НПУ выполнен с возможностью ручного управления/корректировки полета БЛА.
15. Система по п. 10, характеризующаяся тем, что обмен данных БЛА с сервером осуществляется с помощью средства приемо-передачи данных, установленном на БЛА.
| УНИВЕРСАЛЬНЫЙ МОДУЛЬ ПОЛЕЗНОЙ НАГРУЗКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2698254C1 |
| СИСТЕМА ДОСТАВКИ ГРУЗА | 2018 |
|
RU2689643C1 |
| СИСТЕМА ДОСТАВКИ КОНТЕЙНЕРА С ПОМОЩЬЮ ДРОНА | 2016 |
|
RU2646689C1 |
| WO 2019126612 А1, 27.06.2019 | |||
| US 0009845161 В2, 19.12.2017 | |||
| KR 101707130 В1, 15.02.2017. | |||

