Изобретение относится к области логистики, а именно к системам доставки грузов, относящихся к средствам проведения взрывных работ в горно-добывающей области, от места складского хранения зарядов взрывчатых веществ (ВВ) и их компонентов и необходимых для проведения взрывных работ элементов до полевого участка, на котором проводится бурение скважин и закладка зарядов ВВ.
В настоящее время дроны как малогабаритные беспилотные летательные аппараты (БПЛА) находят широкое применение в качестве воздушного средства доставки грузов на небольшие (до 10 км) расстояния с высокой точностью приземления (есть данные, до 10 м) в точку, координаты которой заложены в полетном задании и сопоставляются с текущими данными системой GPS (спутниковая система навигации, обеспечивающая измерение расстояния, времени и определяющая местоположение во всемирной системе координат WGS 84). Применение дронов позволяет существенно сократить время на поставку груза, особенно, если это касается труднодоступных мест.
Например, известен способ оперативного войскового ремонта сложных технических систем (СТС) (RU 2716516) на месте дислокации с применением квадрокоптера, основанный на применении мобильного ремонтно-диагностического комплекса (МРДК) (ремонтная мастерская), при этом в состав МРДК дополнительно вводится квадрокоптер, оборудованный системой крепления технологической тары для сменных элементов/запчастей, и пульт управления квадрокоптером, а при отсутствии в составе ЗИП исправного элемента на замену не ремонтопригодного элемента, этот не ремонтопригодный элемент загружают в тару и закрепляют на квадрокоптере, а квадрокоптер, управляемый оператором МРДК с помощью пульта управления, транспортирует не ремонтопригодный элемент в ближайший стационарный ремонтный центр или в ближайший склад, где производится замена этого элемента в таре на два исправных ремонтопригодных элемента такого же типа, квадрокоптер возвращается к месту дислокации СТС.
Известен способ доставки грузов (RU 2730818), в котором груз от пользователя передают БПЛА, получают от пользователя информацию о получателе груза и передают эту информацию автоматической системе управления доставкой либо человеку, управляющему беспилотным летательным аппаратом, затем определяют местоположение, в котором находится хранилище грузов, связанное с получателем груза, либо местоположение хранилища грузов, выбранного пользователем или получателем груза, далее с помощью системы навигации планируют маршрут БПЛА, после чего перемещают БПЛА с грузом в местоположение, в котором находится хранилище, связанное с получателем груза, или БПЛА в местоположение, в котором находится хранилище грузов, выбранное пользователем или получателем груза, далее груз с помощью БПЛА передают хранилищу грузов, а затем выдают груз получателю груза с помощью хранилища грузов.
Известна система доставки контейнера с помощью дрона (RU 2734927), включающая центр отправки контейнера, дрон, снабженный модулем навигации, модулем пеленгации, датчиком точной посадки и устройством крепления контейнера, смартфон с установленным на нем приложением, мобильный радиомаяк кругового излучения со встроенной системой беспроводной связи для взаимодействия со смартфоном и дроном, а дрон выполнен с возможностью ориентации по спутниковой системе с помощью модуля навигации и с возможностью обнаружения радиомаяка и посадки на него с помощью модуля пеленгации.
Так же известна система доставки контейнера с помощью дрона (RU 2646689, В64С39/02, G06Q10/08, опубл. 06.03.2018 г.), которая включает в себя дрон, пункт выдачи, центр управления и распределительный центр, при этом пункт выдачи выполнен в виде автоматизированной почтовой станции с возможностью приема контейнера от дрона и выдачей контейнера пользователю и расположен на расстоянии от распределительного центра или другого пункта выдачи, соответствующем пути полета дрона без подзарядки, и снабжен датчиками точной посадки дрона, а также оснащен устройством для приема и отправки дронов, снабженным модулем крепления/открепления контейнеров от дронов, распределительный центр содержит устройство для отправки дронов с модулем крепления контейнеров, дрон выполнен с возможностью ориентации по спутниковой системе навигации, распределительный центр выполнен с возможностью получения контейнера и снабжения дрона другим контейнером и содержит круговую ленту транспортера с размеченными точками посадки дрона, центр управления выполнен с возможностью задания и оптимизации полетов маршрута для дрона и контроля местоположения дрона.
Это решение принято в качестве прототипа.
В принципе известное решение представляет типовую схему по использованию дрона в качестве воздушного средства перевозки контейнера до распределительного центра или от распределительного центра в точку приема контейнера. Особенностью данной типовой схемы является то, что отправка дронов и их посадка проводится на специализированных площадках с этих площадок, стационарно размещенных в зоне полетов дронов. Применение дронов со специализированными площадками подразумевает, что процесс воздушной доставки осуществляется в зоне стационарных помещений и здания, к которой относятся города, поселки, поселения и т.д. Это объясняется тем, что дальность полета малогабаритного гражданского назначения дрона примерно равна 8-12 км при времени в непрерывном полете 30-40 мин (зависит от мощности аккумуляторной батареи). При доставке груза дальность и время существенно уменьшаются. Если учесть, что дрон должен вернуться на базу (после доставки контейнера), то можно все поделить на два.
Но в условиях городов и поседений городская инфраструктура работает как блокиратор связи со спутниковой системой навигации.
Основу навигационных систем БПЛА составляют приемники глобальных систем спутниковой навигации (ГССН), совмещенные с блоком инерциальных датчиков пространственной ориентации. Такая система обеспечивает достаточно точное определение местоположения БПЛА и параметров его движения при наличие хорошего сигнала ГССН. При комплексировании со спутниковой навигацией возможно применение низкоточных недорогих инерциальных систем, оснащенных микромеханическими датчиками движения. Но недорогие инерциальные системы не в состоянии осуществлять автономное счисление пройденного пути ввиду высоких скоростей дрейфа гироскопических датчиков. Лучшие образцы способны поддерживать точность навигации до десяти минут максимум на уровне 100-150 м.
Присутствие ГССН сигнала в настоящее время является необходимым условием для автономного беспилотного полета. В случае же использования на БПЛА инерциальной системы сверхнизкой точности, отсутствие корректирующих сигналов от ГССН приводит к полному развалу инерциальной системы и дрон разбивается. Поэтому подавление ГССН рассматривается как серьезный недостаток, с БЛА. Применение высокоточных инерциальных навигационных систем (ИНС) не решает проблему по следующим причинам: такие системы дороги; а масса инерциальной системы «средней точности» на лазерных или волоконно-оптических гироскопах составляет от 8 кг, что делает проблематичным их использование на БПЛА малой и даже средней дальностей. Ко всему прочему, принципиальным ограничением ИНС является рост ошибки определения координат с течением времени автономной работы. Точность автономного счисления координат для современных ИНС составляет порядка 1 морской мили за час полета (для систем высокой точности), что не позволяет обеспечить высокоточное определение координат целей.
Практика применения дронов в структурированной инфраструктуре (город, поселок и т.д.) показала большое число отказов БПЛА как в доставке, так и в точности приземления из-за того, что траектория полета, как правило, имеет сложную конфигурацию (особенно в среде высотных зданий, вышек и т.д.), влияния электромагнитных излучений от ЛЭП и радиосистем, пропадания сигнала связи со спутником (мертвые зоны). В такой структурированной среде это приводит к падениям дронов, потере пространственной ориентации и порче груза.
В неструктурированной инфраструктуре (в районах, где отсутствуют ЛЭП, поселения и источники высоких электромагнитных излучений) простые дроны не так часто подвержены потерям и вполне успешно выполняют функцию доставки грузов. Исключением является недостаточная точность приземления относительно точки приема груза. Но их применение, действительно, позволяет сократить время и материальные затраты на доставку грузов в сложнодосигаемые места, в том числе в период распутицы.
В области горного дела, в частности, области разработок с применением взрывов, оборот взрывчатых веществ, зарядов и принадлежностей к ним строго регламентируется государством и нормативными документами, которые устанавливают определенный порядок получения этих компонентов, применение этих компонентов и возврат неиспользованных компонентов. Как отдельная система, это регулирование не представляет сложностей в ее применении, но требует непосредственного участия всех сторон: хранителя этих компонентов на специализированном складе и получателя необходимого количества компонентов в соответствии с объемом и типом предстоящих взрывных работ.
Осложнения возникают тогда, когда предполагаемый объем взрывных работ, проводимых в полевых условиях, не соответствует реальной потребности ВВ и их компонентов. В этом случае заряжание скважин и шпуров приостанавливается, а грузовой транспорт с ответственным лицом на борту направляется в хранилище, которое может находиться на большом удалении от зоны заряжания скважин и шпуров. Проведение работ по заряжанию шпуров проводится в ясных и не дождливых условиях, так как некоторые ВВ относятся, например, к гидрофобным составам. В результате приостановления работ по подготовке взрывов увеличивается время проведения этих работ и нарушается непрерывность цикла/технологического процесса.
Настоящее изобретение направлено на решение технической задачи по сокращению времени простоя при проведении подготовительных работ по заряжанию скважин и шпуров за счет оперативной и быстрой доставке воздушным путем недостающих компонентов ВВ и зарядов при обеспечении условия гарантированного получения адресатом контейнера с этими элементами в полевых условиях на площадках, координаты которых могут изменяться.
Настоящее изобретение направлено на достижение технического результата, заключающегося в сокращении времени гарантированной доставки воздушным путем неподлежащего вскрытию третьим лицом контейнера с компонентами взрывных зарядов на площадки с изменяемыми в пространстве координатами расположения на месте проведения подготовительных работ по закладке ВВ в шпуры и скважины.
Указанный технический результат достигается тем, что система доставки груза на место проведения горнодобывающим субъектом взрывных работ содержит помещение для хранения компонентов и узлов взрывных зарядов, размещенную рядом с помещением по крайней мере одну базовую посадочно-взлетную площадку, в отношении которой известны координаты ее местоположения, расположенную удаленно от базовой площадки дополнительную посадочно-взлетную площадку, которая размещена на месте проведения взрывных работ и в отношении которой известны координаты ее местоположения, по крайней мере один беспилотный летательный аппарат с пропеллерами, оснащенный GPS системой и процессорным блоком, выполненным с функцией запоминания координат местоположения обеих площадок и с функцией перемещения в режиме автопилотирования по полетному заданию от одной площадки до другой по данным GPS системы, беспилотный летательный аппарат оснащен контейнером в антивандальном исполнении для перевозки компонентов и узлов взрывных зарядов и с кодовым замком с открытием/закрытием от одинаковых по конструктивному исполнению двух металлических ключей, один из которых находится на хранении в помещении, а другой - на месте проведения взрывных работ, при этом процессорный блок выполнен с возможностью выдачи сигналов для зависания над площадкой, координаты которой совпадают с введенными в память координатами базовой или дополнительной площадок, и посадки на эту площадку с выключением пропеллерных двигателей, а на каждой площадке размещен пульт дистанционного включения беспилотного летательного аппарата, имеющий функцию выдачи выбранного полетного задания этому аппарату.
Для этого варианта процессорный блок беспилотного летательного аппарата выполнен с функцией включения аварийной сигнализации при посадке или падении с работающими пропеллерными двигателями в точке с координатами, отличными от координат базовой или дополнительной площадок. А на площадке может быть размещен радиомаячок для коррекции точки посадки беспилотного летательного аппарата, оснащенного мобильной системой пеленгации.
Указанный технический результат так же достигается тем, что система доставки груза на место проведения горнодобывающим субъектом взрывных работ содержит помещение для хранения компонентов и узлов взрывных зарядов, размещенную рядом с помещением по крайней мере одну базовую посадочно-взлетную площадку, в отношении которой известны координаты ее местоположения, расположенную удаленно от базовой площадки дополнительную посадочно-взлетную площадку, которая размещена на месте проведения взрывных работ и в отношении которой известны координаты ее местоположения, по крайней мере один беспилотный летательный аппарат с пропеллерами, оснащенный GPS системой и процессорным блоком, выполненным с функцией запоминания координат местоположения обеих площадок и с функцией перемещения в режиме автопилотирования по полетному заданию от одной площадки до другой по данным GPS системы и радиомаячка, используемого в мобильном варианте применения на месте проведения взрывных работ, беспилотный летательный аппарат оснащен мобильной системой педенгации и контейнером в антивандальном исполнении для перевозки компонентов и узлов взрывных зарядов и с кодовым замком с открытием/закрытием от одинаковых по конструктивному исполнению двух металлических ключей, один из которых находится на хранении в помещении, а другой - на месте проведения взрывных работ, при этом процессорный блок выполнен с возможностью зависания над площадкой, координаты которой совпадают с введенными в память координатами базовой или дополнительной площадок, включения мобильной системы пеленгации и посадки на эту площадку с выключением пропеллерных двигателей при отсутствии сигнала от радиомаячка, или процессорный блок выполнен с возможностью зависания над площадкой, координаты которой совпадают с введенными в память координатами базовой или дополнительной площадок, включения мобильной системы пеленгации, выявления сигнала радиомаячка и полета в сторону этого радиомаячка с посадкой на землю в точке максимального радиосигнала с выключением пропеллерных двигателей.
При этом для второго варианта на каждой площадке размещен пульт дистанционного включения беспилотного летательного аппарата, имеющий функцию выдачи выбранного полетного задания этому аппарату. В этом варианте процессорный блок беспилотного летательного аппарата выполнен с функцией включения аварийной сигнализации при посадке или падении с работающими пропеллерными двигателями в точке с координатами, отличными от координат базовой или дополнительной площадок, и при отсутствии сигнала радиомаячка.
Указанные признаки являются существенными и взаимосвязаны с образованием устойчивой совокупности существенных признаков, достаточной для получения требуемого технического результата.
Настоящее изобретение поясняется конкретным примером исполнения, который, однако, не является единственно возможным, но наглядно демонстрирует возможность достижения требуемого технического результата.
На фиг. 1 общая схема системы доставки груза на место проведения горнодобывающим субъектом взрывных работ.
Согласно настоящему изобретению, рассматривается новая конструкция системы доставки груза на место проведения горнодобывающим субъектом взрывных работ, особенностью которой является использование по крайней мере одного дрона 1 (беспилотный летательный аппарат - БПЛА типа коптера, обладающего возможность вертикального взлета и посадки: трикоптер, квадрокоптер, гексакоптер, октокоптер или мультикоптер, имеющего электродвигатели с пропеллерами в качестве устройств создания подъемной силы).
Система содержит стационарно установленное помещение 2 для хранения компонентов и узлов взрывных зарядов, которое относится к категории склада или хранилища. Это может быть централизованное хранилище для обслуживания нескольких горных разработок в общем регионе или временное хранилище/склад, которое образовано удаленно от места проведения горнодобывающих работ и обслуживает конкретную полевую площадку. Рядом с помещением 2 организована по крайней мере одна базовая посадочно-взлетная площадка 3, в отношении которой известны координаты ее местоположения. Эта площадка используется в качестве отправной точки при отправке дрона 1 в сторону потребителя и в качестве приемной точки при возвращении дрона на базу. Конструктив базовой площадки в рамках данной заявки не рассматривается, но, как вариант, может быть выполнена на земле, на плиточной площадки или выполнена в виде специализированной посадочно-взлетной платформы, которая, как пример, описана в RU 2646689.
Удаленно от базовой площадки расположена дополнительная посадочно-взлетная площадка 4, которая размещена на месте 5 проведения взрывных работ и в отношении которой так же известны координаты ее местоположения. Эта площадка выполнена на грунте. При этом координаты этой площадки могут меняться по причине того, что место проведения подготовительных к взрыву работ может смещаться и удаляться от точки начала этих работ.
БПЛА оснащен контейнером 6 в антивандальном исполнении для перевозки компонентов и узлов взрывных зарядов, имеющий кодовый замок 7 с открытием/закрытием от одинаковых по конструктивному исполнению двух металлических ключей 8, один из которых находится на хранении в помещении 2, а другой - на месте 5 проведения взрывных работ. Контейнер может быть выполнен в съемном варианте или в несъемном варианте, когда контейнер жестко прикреплен к корпусу БПЛА или является частью корпуса БПЛА. Вариант несъемного контейнера с учетом поставленной задачи является предпочтительным, так как БПЛА относится к типу возвращаемых аппаратов и в связи с тем, что к контейнеру привязаны два кодовых ключа и контейнер БПЛА может работать в качестве передаточного ящика. При съемном варианте контейнер может быть извлечен из БПЛА и помещен на хранение во временном складе.
На каждой площадке размещен пульт 9 дистанционного включения БПЛА, имеющий функцию выдачи выбранного полетного задания этому аппарату. В качестве полетного задания используется схема маршрута от А до Б или от Б до А, где А и Б - это посадочно-взлетные площадки 3 и 4, соответственно. Маршрут может быть выполнен прямолинейным или иметь другую конфигурацию, которая определяется рельефом местности в зоне работы БПЛА.
Процессорный блок БПЛА выполнен с функцией включения аварийной сигнализации (световой или звуковой или световой и звуковой) при посадке или падении с работающими пропеллерными двигателями в точке с координатами, отличными от координат базовой или дополнительной площадок. Данное условие является важным, так как доступ ключом к контейнеру возможен только при условии посадки аппарата на площадку и выключении процессорным блоком пропеллерных электродвигателей. Эти два условия снимают блокировку с контейнера и дают возможность его открыть, если конфигурация ключ соответствует коду приемной части замка. При падении, вызванным резким порывом ветра или отказом одного или двух электродвигателей, блокировка замка не снимается, а процессор включает аварийную сигнализацию. При этом несанкционированный доступ к контейнеру невозможен. При обнаружении упавшего дрона, контейнер или сам дрон с контейнером отправляют в помещение 2 для вскрытия контейнера по служебному алгоритму. БПЛА оснащен GPS системой, связанной так же с процессорным блоком, выполненным с функцией запоминания координат местоположения обеих площадок и управления перемещением аппарата в режиме автопилотирования по полетному заданию от одной площадки до другой по данным GPS системы. GPS система - система глобального позиционирования, обеспечивающая измерение расстояния, времени и определяющая местоположение во всемирной системе координат WGS 84. Позволяет почти при любой погоде определять местоположение в любом месте при условии, что существует беспрепятственная прямая видимость как минимум с четырьмя спутниками 10. Основной принцип использования системы - определение местоположения путем измерения моментов времени приема синхронизированного сигнала от навигационных спутников антенной потребителя. Данная навигационная система используется в БПЛА для нахождения точки с заданными координатами и приземления в этой точке, которая в рамках заявки названа как базовая или дополнительная площадки. При выходе на торчку процессорный блок выполнен с возможностью выдачи сигнала для зависания над площадкой, координаты которой совпадают с введенными в память координатами базовой или дополнительной площадок, и посадки на эту площадку с последующим выключением пропеллерных двигателей. После посадки и выгрузки контейнера оператор, работающий на дополнительной площадке 4 включает дрон и пультом переустанавливает полетное задание, задавая точку Б, как исходную, а точку А, как конечную. В принципе, теоретически, применение только GPS системы достаточно для решения задачи перемещения контейнера из точки А в точку Б или наоборот. Такие системы вполне с достаточной точностью приземления позволяют аппаратно-насыщенным БПЛА решать задачи по перемещению по траектории и приземлении в зоне площадок. Но такие БПЛА относятся к сложным дорогостоящим аппаратам, имеющим большой вес. А на практике, чаще встречаются упрощенные БПЛА, которые не могут себе позволить по весовым характеристикам иметь на борту систему позиционирования весом, например от 8 кг.
Особенностью заявленного изобретения является то, что БПЛА совершает полеты в режиме автопилотирования без участия оператора по коррекции курса. В качестве полетного задания устанавливают курсовое направление в приближенной форме и запоминание точек взлета и приземления. А при таком автопилотировании GPS система накапливает ошибки, которые приводят к несовпадению координаты площадки с реальным местом нахождения БПЛА по отношению к этой площадке с разбросом до 150 м.
Система полета любого дрона действует благодаря устройству, которое именуется как радар позиционирования и возвращения домой. Большинство современных беспилотников наделяются двумя системами GPS и ГЛОНАСС. Приемник ГЛОНАСС может использовать сигналы от нескольких группировок спутников 10, что повышает точность и надежность по сравнению с использованием одной системы, такой как GPS. Имея доступ к большему количеству спутников, ГЛОНАСС может обеспечить более высокую точность и надежность позиционирования в различных условиях. В этом случае процессорный блок корректирует показания одной системы по отношению к другой и по скорости полета, коррелируя данные и приводя их к обобщенной координате, это позволяет уменьшить ошибки и сузить разброс по посадке. Для сужения разброса предлагается на дополнительной площадке устанавливать радиомаячок 11 для коррекции точки посадки БПЛА, оснащенного мобильной системой пеленгации. При подлете к площадке (даже с отклонением от курса из-за ошибок) и до посадки процессорный блок отправляет управляющий сигнал на включение системы пеленгации.
В настоящее время разработана система Millisign, которая включает в себя увеличенные версии меток RFID (идентификация по радиочастотам), которые в настоящее время используются на многих продуктах. В системе Millisign небольшой дрон с радаром миллиметрового диапазона заменяет ручной считыватель. Когда одна из больших меток на посадочной площадке получает радиосигнал от дрона, она передает ответный сигнал обратно дрону. Этот ответ указывает на местоположение метки/площадки относительно дрона, таким образом, дрон может определить его, даже не видя - чем интенсивнее принимаемый сигнал, тем ближе дрон к своей цели. Кроме использования на посадочных площадках, метки Millisign могут также служить навигационными маяками вдоль маршрута доставки дрона. Метки Millisign включают в себя угловые отражатели, которые позволяют им отправлять и получать сигналы на широком трехмерном угле. Метка размером 292×600 мм может быть прочитана БПЛА на расстоянии 10-15 метров.
На практике, дополнительная площадка может изменять место своего положения смещаться в зависимости от особенностей проведения работ по подготовке к взрывным работам. То есть, изначальные координаты этой площадки могут быть отличны от реальных координат по новому месту ее положения. А в базе процессорного блока закреплены старые координаты этой площадки. В такой ситуации процессорный блок выполнен с включением функции зависания БПЛА над площадкой, координаты которой совпадают с введенными в память координатами базовой или дополнительной площадок, включением мобильной системы пеленгации, выявлением сигнала радиомаячка и выдачей управляющего сигнала на полет в сторону этого радиомаячка с посадкой на землю в точке максимального радиосигнала с выключением пропеллерных двигателей. Так как система пеленгации работает по функции считывания усиления сигнала, то дрон может перелететь площадку. При удалении от нее радиосигнал будет ослабевать, что считается основанием вернуться в точку зафиксированного максимального сигнала и совершить посадку именно в этой точке. Такой радиомаячок так же может быть размещен и на базовой площадке. Пери этом используется кодированный сигнал типа «свой-свой». При несовпадении кодового сигнала БПЛА не реагирует на сигнал радиомаячка.
При отсутствии сигнала радиомаячка БПЛА совершает посадку в точке, координаты которой по данным навигации совпадают с введенными в память координатами.
Изобретение промышленно применимо. Позволяет сократить время гарантированной доставки воздушным путем неподлежащего вскрытию третьим лицом контейнера с компонентами взрывных зарядов на площадки с постоянными и изменяемыми в пространстве координатами расположения на месте проведения подготовительных работ по закладке ВВ в шпуры и скважины. При этом полеты БПЛА совершаются в режиме автопилотирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система доставки груза горнодобывающим субъектом на место проведения взрывных работ (варианты) | 2024 |
|
RU2839710C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ | 2018 |
|
RU2714977C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ БОКС ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 2023 |
|
RU2818898C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| Способ проведения поисково-спасательных работ | 2018 |
|
RU2698893C1 |
| Воздухоплавательный аппарат | 2017 |
|
RU2652322C1 |
| СПОСОБ И КОМПЛЕКСНАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ АВИАЦИОННЫМИ СИСТЕМАМИ НАБЛЮДЕНИЯ И НАВИГАЦИИ | 2020 |
|
RU2799550C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |

Изобретение относится к области технических средств для логистики. Технический результат - сокращение времени доставки воздушным путем защищенного от вскрытия контейнера с компонентами взрывных зарядов на площадки с изменяемыми координатами. Результат достигается тем, что предложена система доставки груза на место проведения горнодобывающим субъектом взрывных работ, характеризующаяся тем, что содержит помещение для хранения компонентов взрывных зарядов, размещенную рядом с помещением по крайней мере одну базовую посадочно-взлетную площадку, координаты местоположения которой известны, расположенную удаленно от базовой площадки дополнительную посадочно-взлетную площадку, которая размещена на месте проведения взрывных работ, координаты местоположения которой известны, по крайней мере один беспилотный летательный аппарат с пропеллерами, оснащенный GPS системой и процессорным блоком, выполненным с функцией запоминания координат местоположения обеих площадок и с функцией перемещения в режиме автопилотирования по полетному заданию от одной площадки до другой по данным GPS системы и возможностью выдачи сигналов для зависания над одной из указанных площадок и посадки на площадку с выключением пропеллерных двигателей. 2 н. и 4 з.п. ф-лы, 1 ил.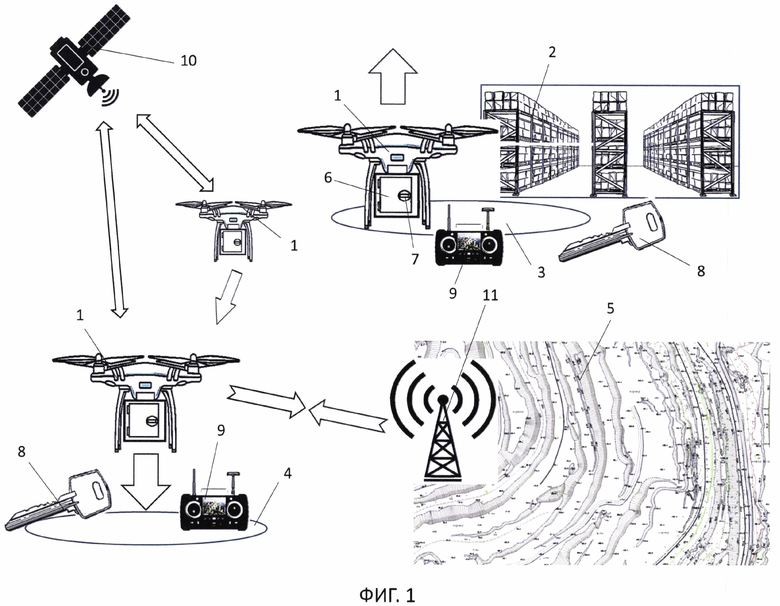
1. Система доставки груза на место проведения горнодобывающим субъектом взрывных работ, характеризующаяся тем, что содержит помещение для хранения компонентов и узлов взрывных зарядов, размещенную рядом с помещением по крайней мере одну базовую посадочно-взлетную площадку, в отношении которой известны координаты ее местоположения, расположенную удаленно от базовой площадки дополнительную посадочно-взлетную площадку, которая размещена на месте проведения взрывных работ и в отношении которой известны координаты ее местоположения, по крайней мере один беспилотный летательный аппарат с пропеллерами, оснащенный GPS системой и процессорным блоком, выполненным с функцией запоминания координат местоположения обеих площадок и с функцией перемещения в режиме автопилотирования по полетному заданию от одной площадки до другой по данным GPS системы, беспилотный летательный аппарат оснащен контейнером в антивандальном исполнении для перевозки компонентов и узлов взрывных зарядов и с кодовым замком с открытием/закрытием от одинаковых по конструктивному исполнению двух металлических ключей, один из которых находится на хранении в помещении, а другой - на месте проведения взрывных работ, при этом процессорный блок выполнен с возможностью выдачи сигналов для зависания над площадкой, координаты которой совпадают с введенными в память координатами базовой или дополнительной площадок, и посадки на эту площадку с выключением пропеллерных двигателей, а на каждой площадке размещен пульт дистанционного включения беспилотного летательного аппарата, имеющий функцию выдачи выбранного полетного задания этому аппарату.
2. Система по п. 1, отличающаяся тем, что процессорный блок беспилотного летательного аппарата выполнен с функцией включения аварийной сигнализации при посадке или падении с работающими пропеллерными двигателями в точке с координатами, отличными от координат базовой или дополнительной площадок.
3. Система по п. 1, отличающаяся тем, что на площадке размещен радиомаячок для коррекции точки посадки беспилотного летательного аппарата, оснащенного мобильной системой пеленгации.
4. Система доставки груза на место проведения горнодобывающим субъектом взрывных работ, характеризующаяся тем, что содержит помещение для хранения компонентов и узлов взрывных зарядов, размещенную рядом с помещением по крайней мере одну базовую посадочно-взлетную площадку, в отношении которой известны координаты ее местоположения, расположенную удаленно от базовой площадки дополнительную посадочно-взлетную площадку, которая размещена на месте проведения взрывных работ и в отношении которой известны координаты ее местоположения, по крайней мере один беспилотный летательный аппарат с пропеллерами, оснащенный GPS системой и процессорным блоком, выполненным с функцией запоминания координат местоположения обеих площадок и с функцией перемещения в режиме автопилотирования по полетному заданию от одной площадки до другой по данным GPS системы и радиомаячка, используемого в мобильном варианте применения на месте проведения взрывных работ, беспилотный летательный аппарат оснащен мобильной системой пеленгации и контейнером в антивандальном исполнении для перевозки компонентов и узлов взрывных зарядов и с кодовым замком с открытием/закрытием от одинаковых по конструктивному исполнению двух металлических ключей, один из которых находится на хранении в помещении, а другой - на месте проведения взрывных работ, при этом процессорный блок выполнен с возможностью зависания над площадкой, координаты которой совпадают с введенными в память координатами базовой или дополнительной площадок, включения мобильной системы пеленгации и посадки на эту площадку с выключением пропеллерных двигателей при отсутствии сигнала от радиомаячка, или процессорный блок выполнен с возможностью зависания над площадкой, координаты которой совпадают с введенными в память координатами базовой или дополнительной площадок, включения мобильной системы пеленгации, выявления сигнала радиомаячка и полета в сторону этого радиомаячка с посадкой на землю в точке максимального радиосигнала с выключением пропеллерных двигателей.
5. Система по п. 4, отличающаяся тем, что на каждой площадке размещен пульт дистанционного включения беспилотного летательного аппарата, имеющий функцию выдачи выбранного полетного задания этому аппарату.
6. Система по п. 4, отличающаяся тем, что процессорный блок беспилотного летательного аппарата выполнен с функцией включения аварийной сигнализации при посадке или падении с работающими пропеллерными двигателями в точке с координатами, отличными от координат базовой или дополнительной площадок, и при отсутствии сигнала радиомаячка.
| СИСТЕМА ДОСТАВКИ КОНТЕЙНЕРА С ПОМОЩЬЮ ДРОНА | 2016 |
|
RU2646689C1 |
| Система точной доставки дронами с идентификацией личности получателя | 2020 |
|
RU2734927C1 |
| US 20210300557 A1, 30.09.2021 | |||
| US 20160140496 A1, 19.05.2016. | |||

