СВЯЗАННЫЕ ЗАЯВКИ
Данная заявка испрашивает приоритет по совместно рассматриваемым, выложенным ранее патентным заявкам США № 61/514542, зарегистрированной 3 августа 2011 г., № 61/514543, зарегистрированной 3 августа 2011 г., и № 61/514566, зарегистрированной 3 августа 2011 г., которые полностью включены в данный документ посредством ссылки. В настоящую заявку также полностью включены посредством ссылки заявка PCT/US2012/049532, зарегистрированная 3 августа 2012 г., под названием "AUTOMAТED OPERATIONS OF A MINING MACHINE" и заявка США № 13/566150, зарегистрированная 3 августа 2012 г., под названием "MATERIAL HANDLING SYSTEM FOR MINING MACHINE".
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к горнодобывающему оборудованию и в частности к горным машинам непрерывного действия.
Традиционно выемка твердой горной породы в горнодобывающей промышленности и строительстве проводится в одной из двух форм: выемка с помощью взрывной отбойки или выемка с помощью режущей головки с дисковыми шарошками. Взрывные горные работы предусматривают бурение серии шпуров относительно небольшого диаметра в горной породе, подлежащей выемке, и заряжание шпуров взрывчатым веществом (ВВ). ВВ затем подрывают в последовательности, разработанной для отбойки требуемого объема горной породы, для последующего удаления с помощью подходящего погрузочного и транспортного оборудования. Вместе с тем относительно непредсказуемое распределение по крупности полученной ископаемой горной породы усложняет дальнейшую переработку.
Механическое дробление горной породы исключает использование ВВ; вместе с тем выемочные комбайны с дисковыми шарошками требуют приложения очень больших сил для разрушения и дробления горной породы при выемке. Обычные операции при подземной горной добыче могут приводить к нестабильности кровли выработки (также называется висячий бок) и забоя горной выработки. Для предотвращения обрушения стенок при бурении горной машиной вглубь жилы минерала используются гидравлические цилиндры для создания крепи забоя горных выработок. Для создания крепи висячего бока гидравлические цилиндры часто должны прикладывать силы более 40 тонн на висячий бок. Данная сила обуславливает внедрение гидравлической крепи в висячий бок, что ослабляет висячий бок и увеличивает риск обвала горной породы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном варианте осуществления изобретения создана горная машина, включающая в себя раму, врубовую головку, подвижно соединенную с рамой и поворачивающуюся вокруг оси, являющейся по существу перпендикулярной первой поверхности горной выработки, и первый исполнительный механизм для стабилизации рамы относительно первой поверхности горной выработки. Первый исполнительный механизм соединяется с рамой и включает в себя первый конец, выдвигающийся в первом направлении для взаимодействия с первой поверхностью горной выработки. Выдвижение первого исполнительного механизма автоматически регулируется на основе измерений по меньшей мере одного индикатора силы, действующей между первым исполнительным механизмом и первой поверхностью горной выработки.
В другом варианте осуществления изобретения создан способ стабилизации горной машины относительно поверхности горной выработки. Способ включает в себя выдвижение по меньшей мере одного исполнительного механизма к поверхности горной выработки до достижения по меньшей мере одним индикатором силы, действующей между исполнительным механизмом и поверхностью горной выработки, заданного значения, втягивание по меньшей мере одного исполнительного механизма в течение заданного времени и выдвижение по меньшей мере одного исполнительного механизма в течение заданного времени плюс дополнительное время.
В еще одном варианте осуществления изобретения создан способ стабилизации горной машины относительно первой поверхности горной выработки и второй поверхности горной выработки. Способ включает в себя выдвижение первого исполнительного механизма к первой поверхности горной выработки до достижения по меньшей мере одним индикатором силы, действующей между первым исполнительным механизмом и первой поверхностью горной выработки заданного значения, втягивание первого исполнительного механизма на первое заданное расстояние, выдвижение первого исполнительного механизма на первое заданное расстояние плюс расстояние смещения, выдвижение второго исполнительного механизма ко второй поверхности горной выработки до достижения по меньшей мере одним индикатором силы, действующей между вторым исполнительным механизмом и второй поверхностью горной выработки, заданного значения, втягивание второго исполнительного механизма на второе заданное расстояние и выдвижение второго исполнительного механизма на второе заданное расстояние плюс расстояние смещения.
Другие аспекты изобретения должны стать ясны в результате рассмотрения подробного описания и прилагаемых чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
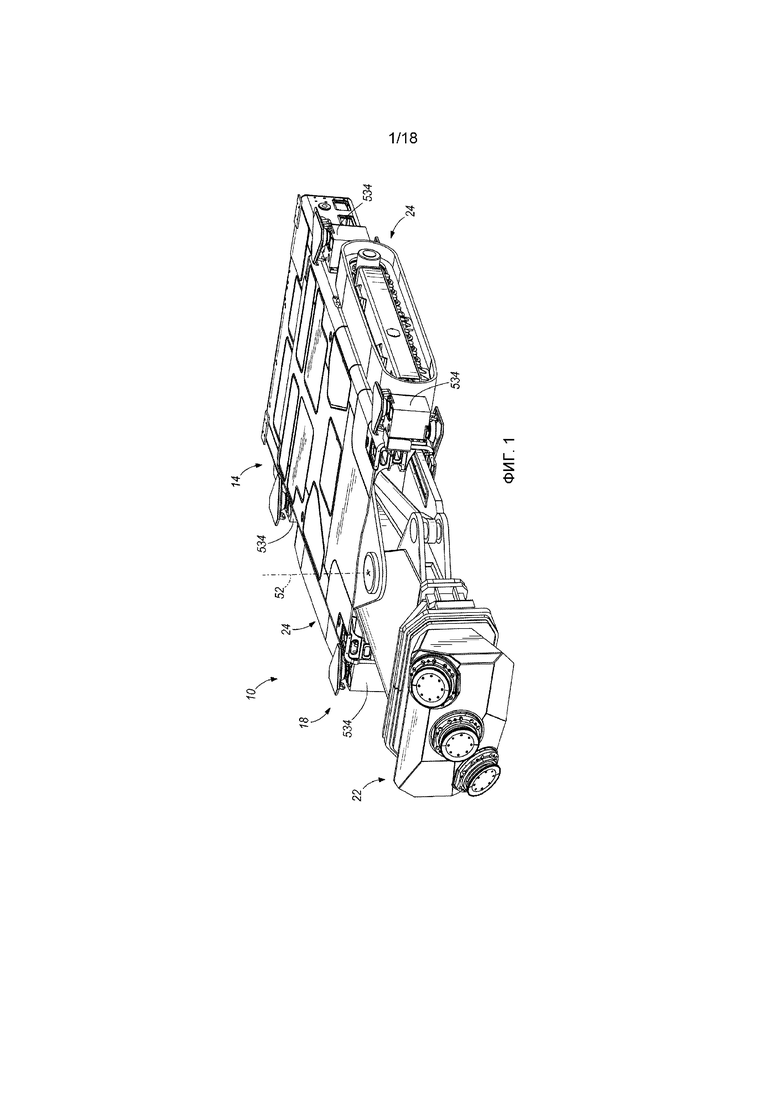
На фиг. 1 показана в изометрии горная машина.
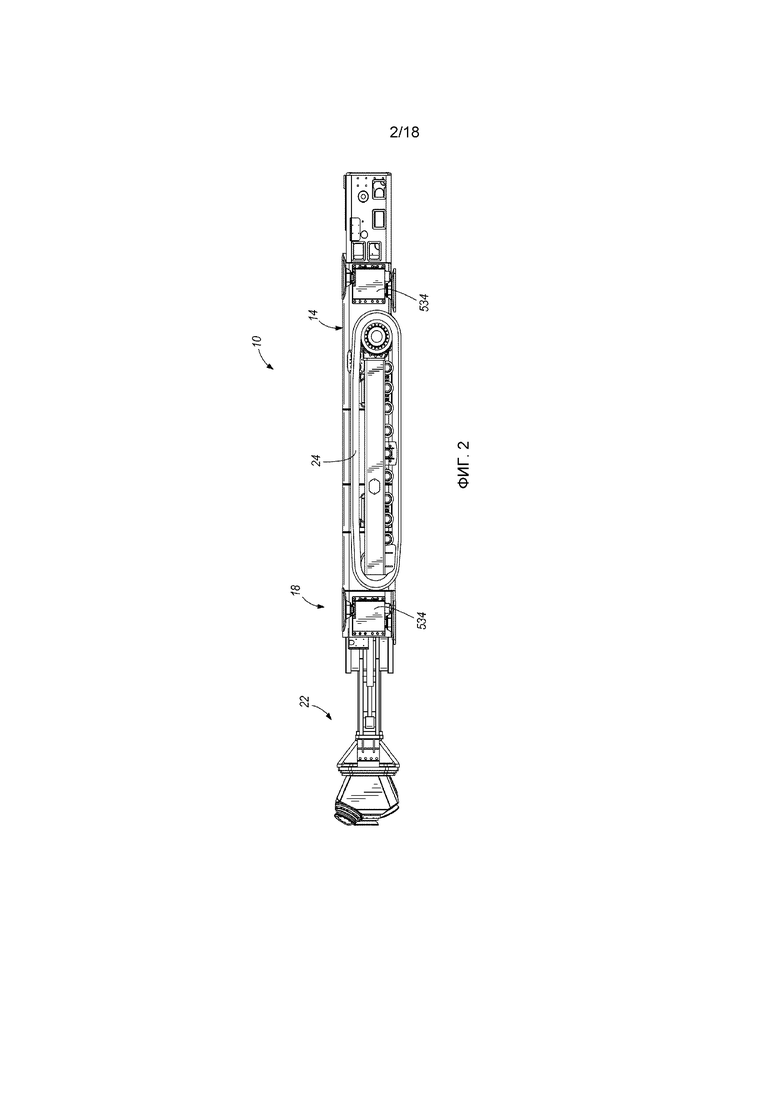
На фиг. 2 показан вид сбоку горной машины по фиг. 1.
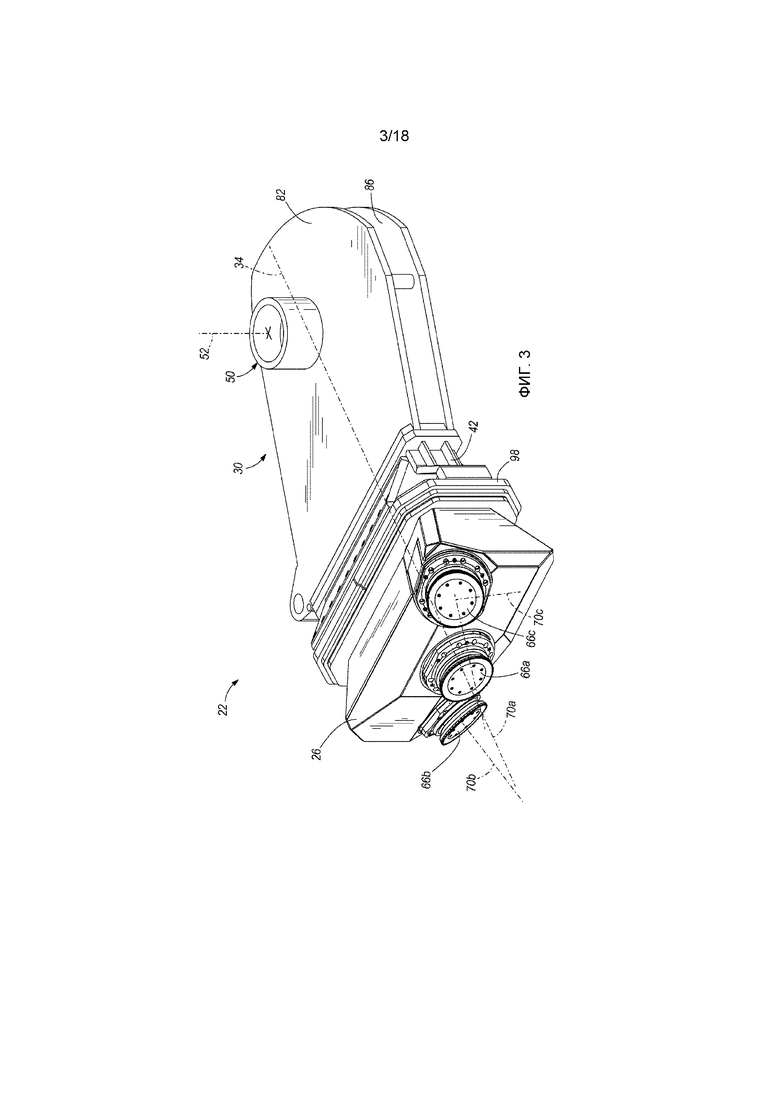
На фиг. 3 показано в изометрии врубовое устройство.
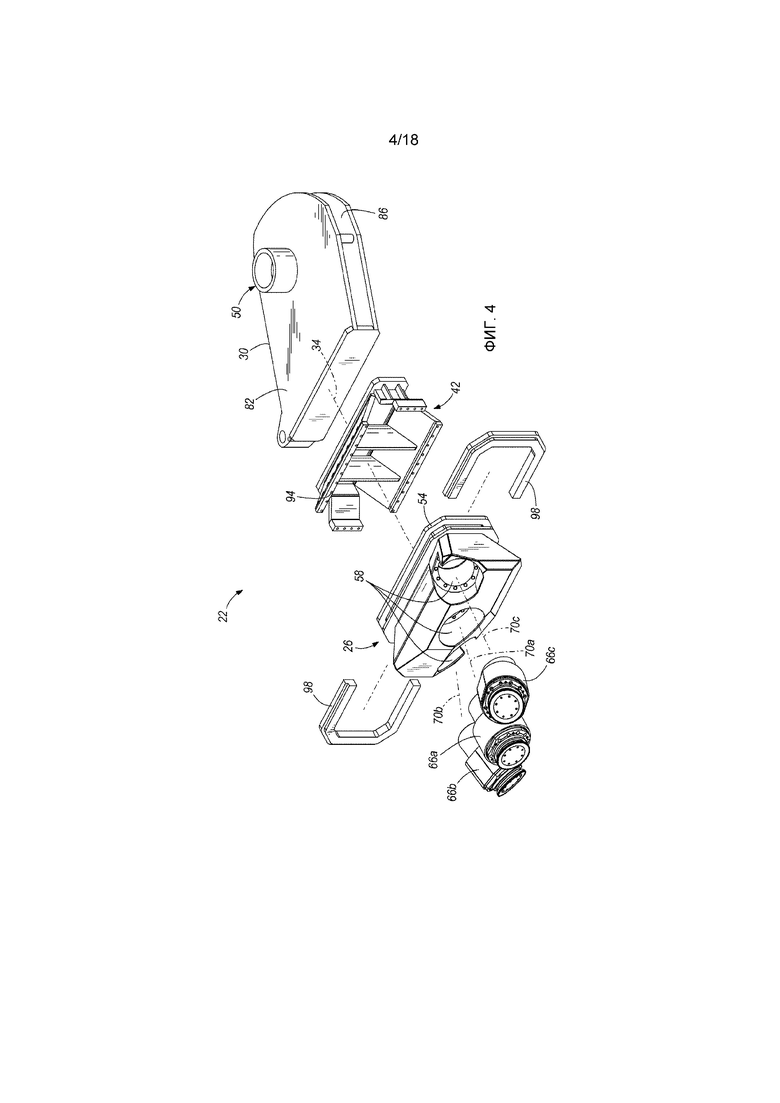
На фиг. 4 показано в изометрии разобранное врубовое устройство фиг. 3.
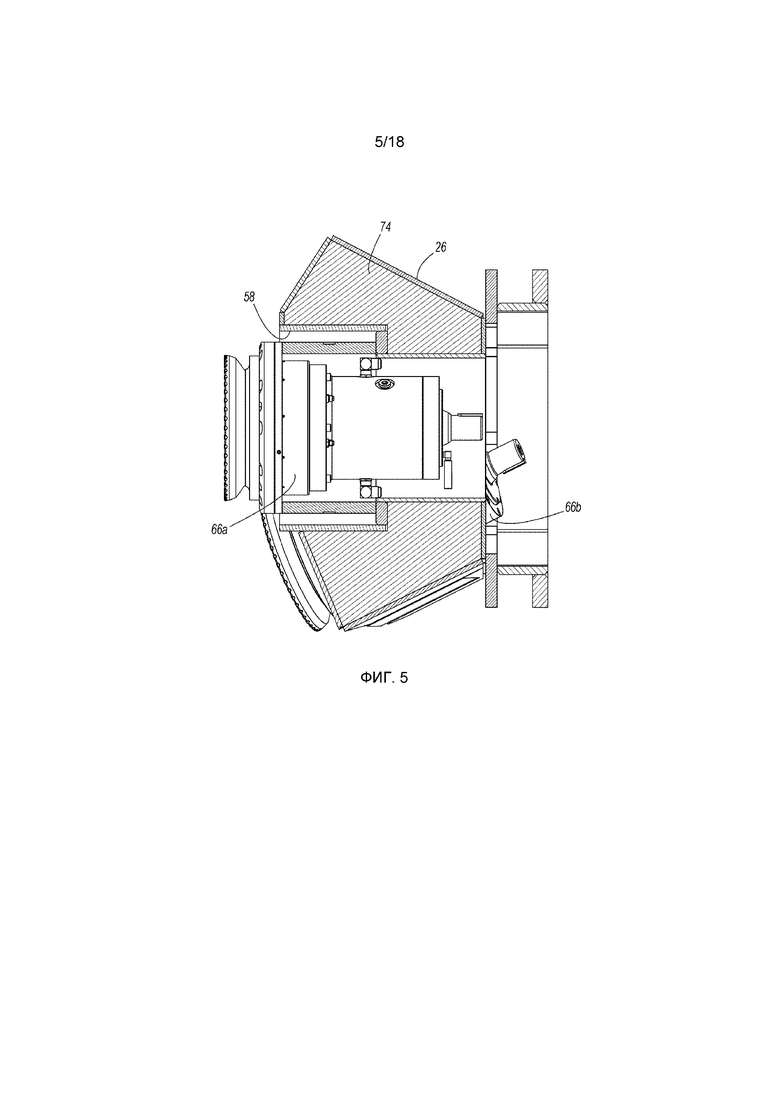
На фиг. 5 показано сечение врубовой головки врубового устройства по фиг. 3.
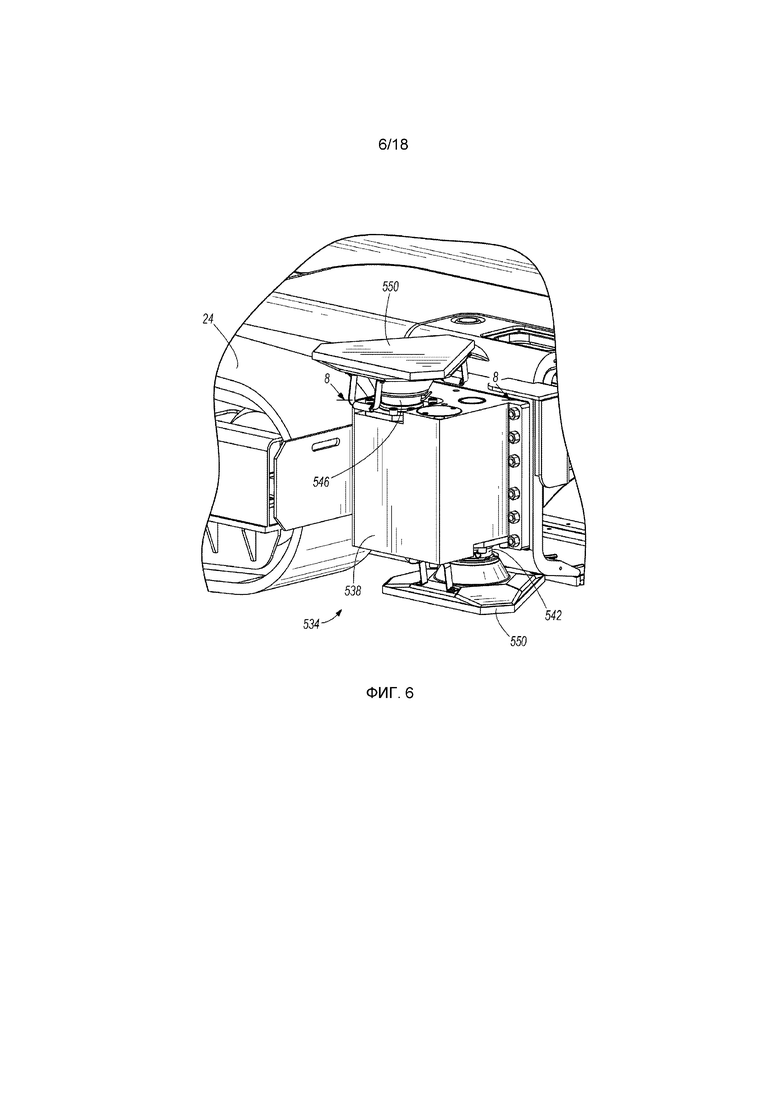
На фиг. 6 показано в изометрии стабилизирующее устройство в убранном положении.
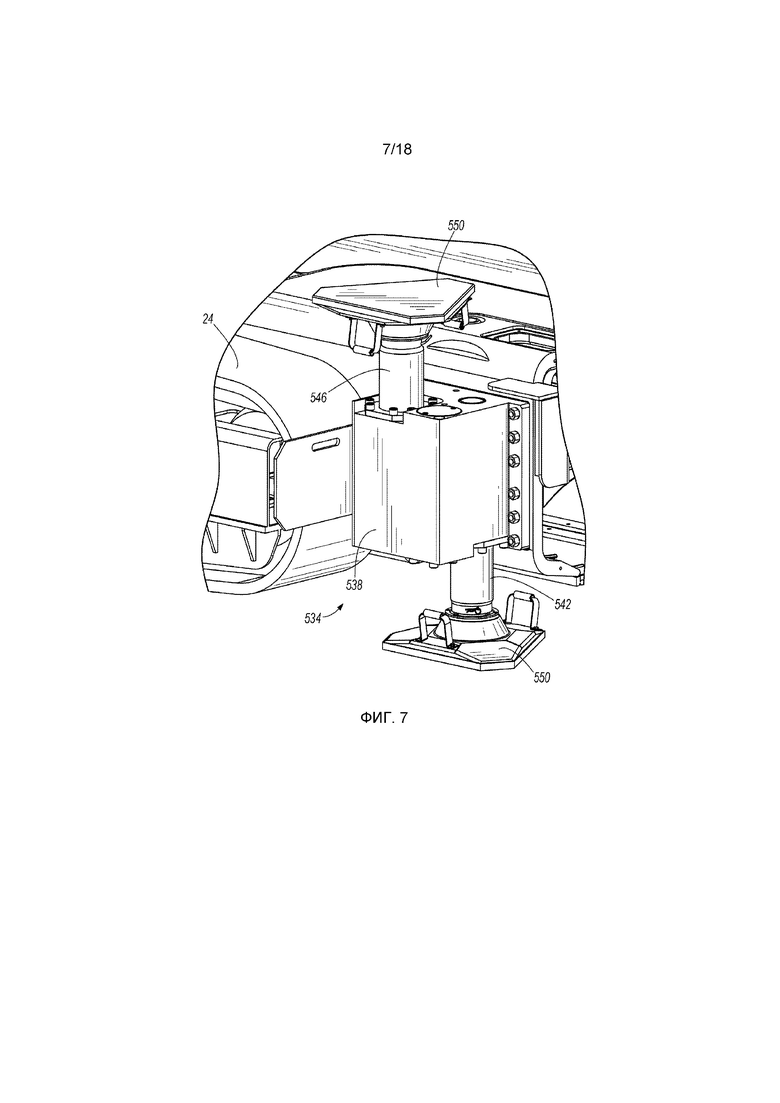
На фиг. 7 показано в изометрии стабилизирующее устройство по фиг. 6 в выдвинутом положении.
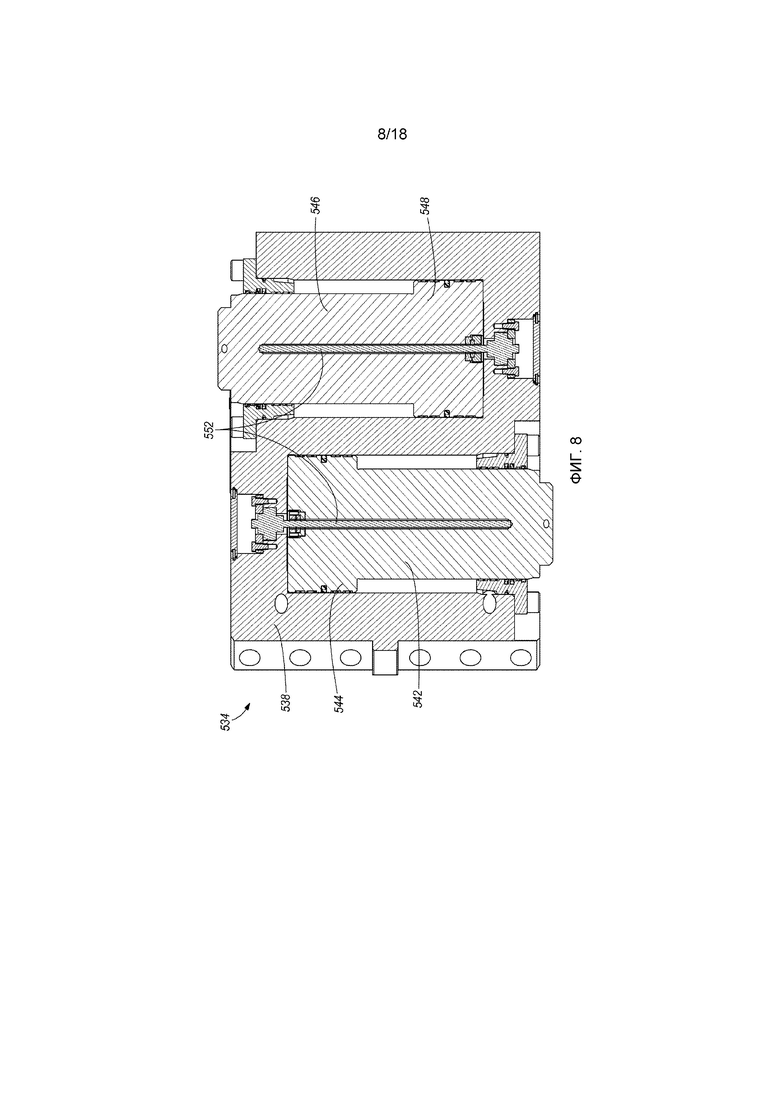
На фиг. 8 показано сечение стабилизирующего устройства фиг. 6 по линии 8-8.
На фиг. 9 показан вид сбоку переклада.
На фиг. 10 показан в изометрии переклад.
На фиг. 11 показано сечение переклада по фиг. 10 по линии 11-11.
На фиг. 12 показана в изометрии дистанцирующая прокладка.
На фиг. 13 показан вид сбоку переклада и дистанцирующей прокладки в прижатой конфигурации.
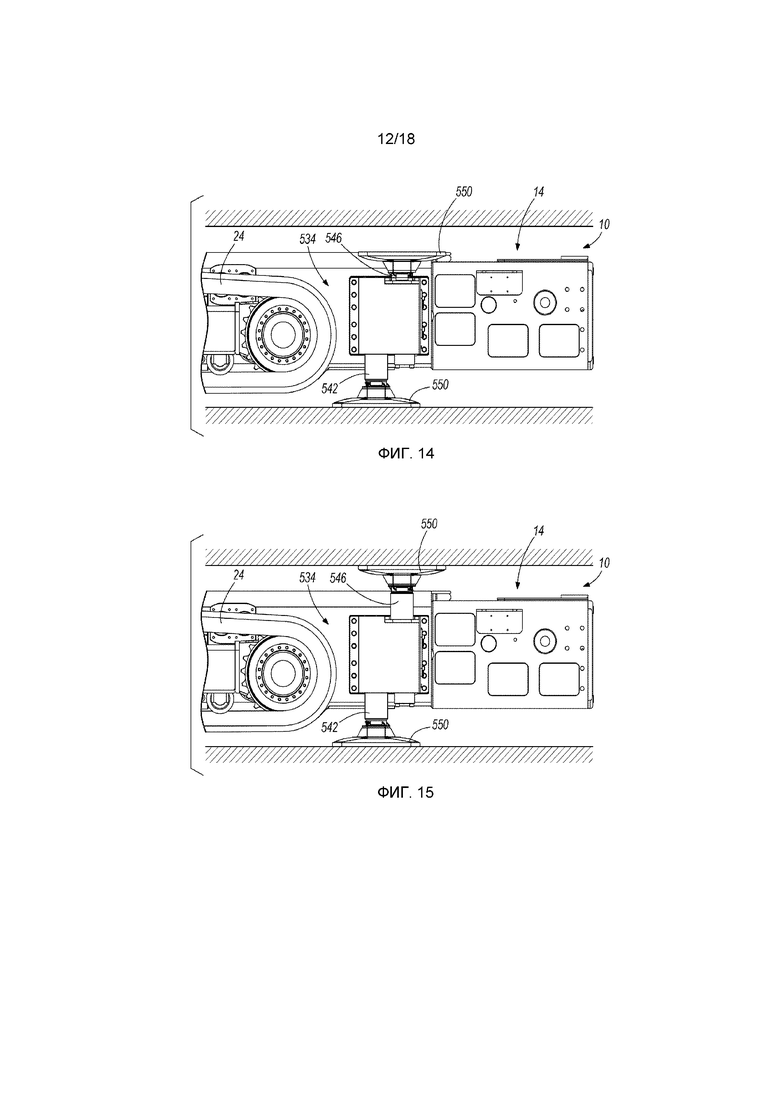
На фиг. 14 показан фрагмент вида сбоку горной машины фиг. 1 с исполнительным механизмом горизонтирования в выдвинутом положении.
На фиг. 15 показан фрагмент вида сбоку горной машины фиг. 1 с исполнительным механизмом горизонтирования и исполнительным механизмом создания крепи в выдвинутом положении.
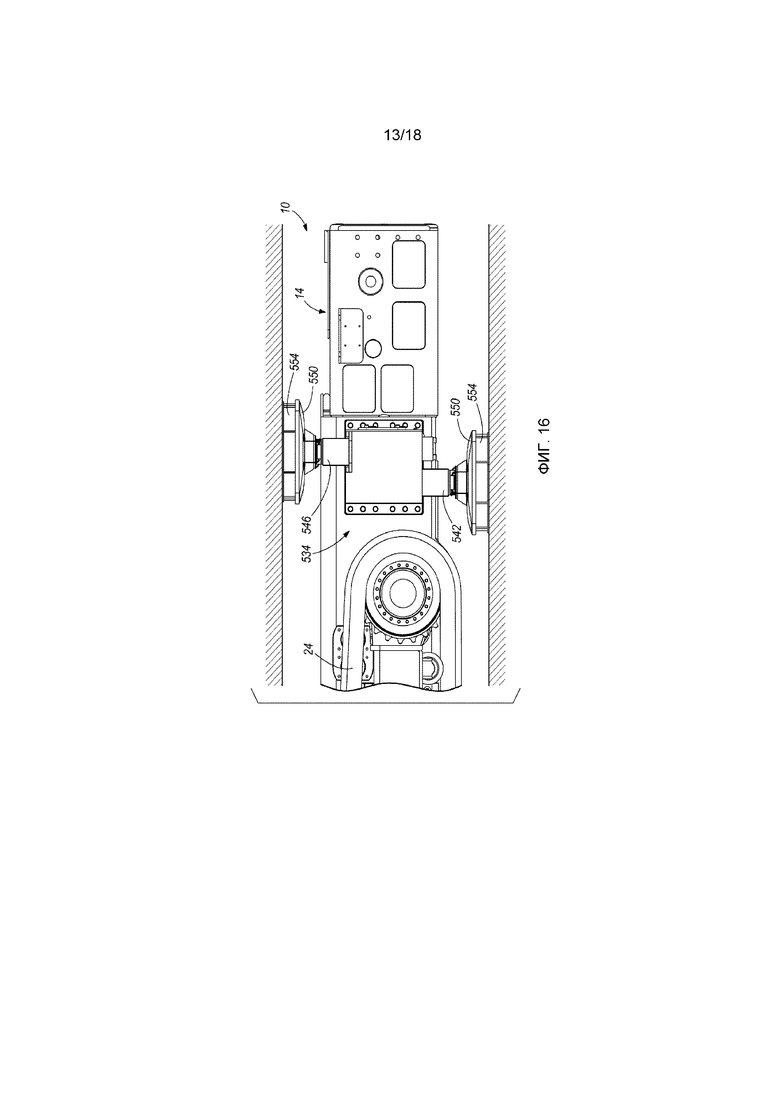
На фиг. 16 показан фрагмент вида сбоку горной машины фиг. 1 с исполнительным механизмом горизонтирования и исполнительным механизмом создания крепи в выдвинутом положении и дополнительно включающими в себя дистанцирующую прокладку, установленную смежно с перекладом, соединенным с каждым исполнительным механизмом.
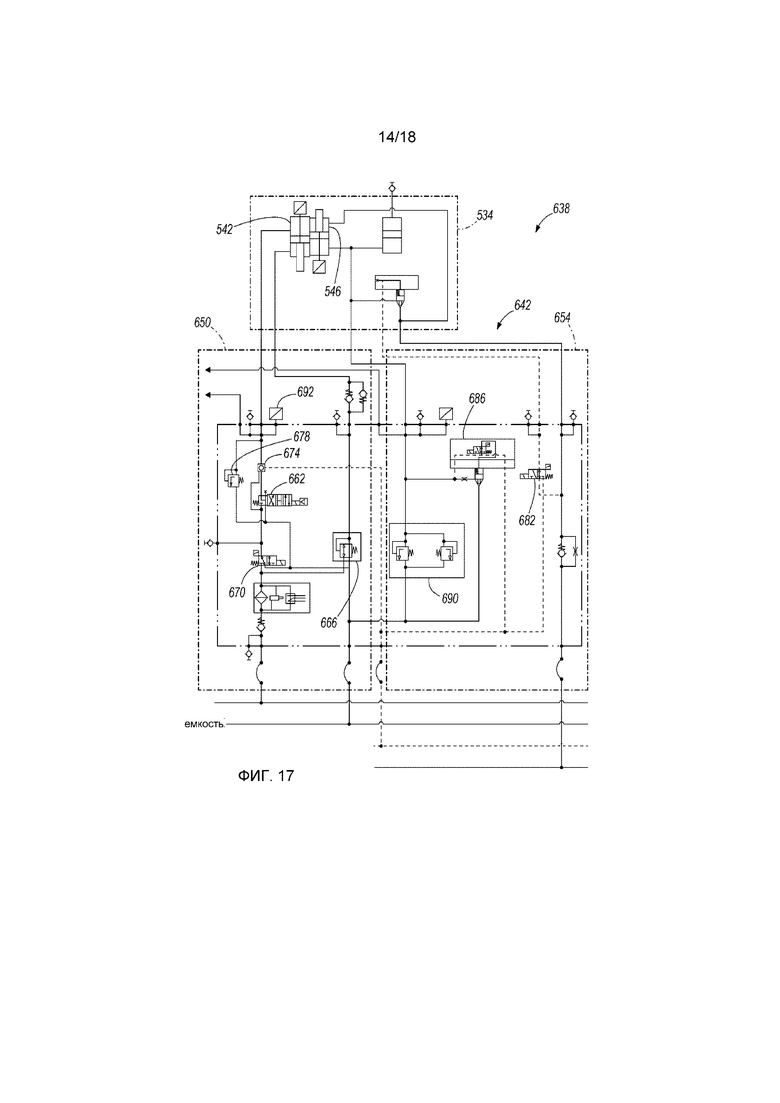
На фиг. 17 показана схема гидравлической системы управления стабилизирующего устройства.
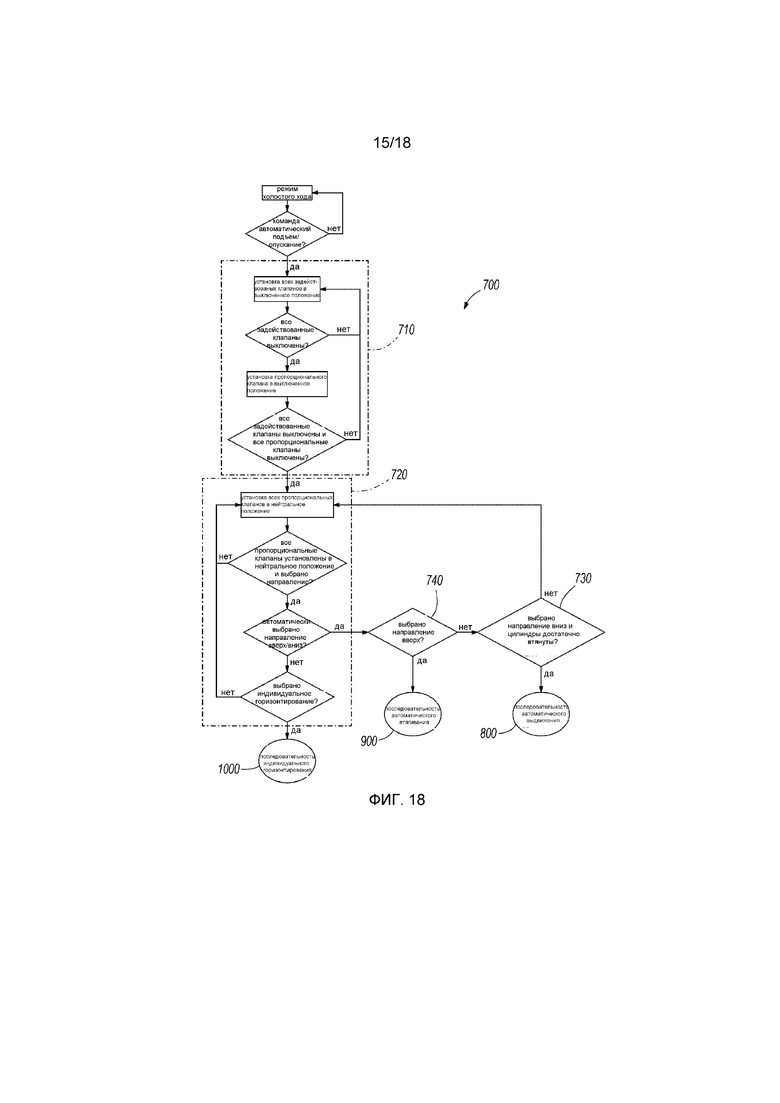
На фиг. 18 показана схема последовательности селекции горизонтирования.
На фиг. 19 показана схема последовательности управления горизонтирования для автоматического выдвижения и втягивания стабилизирующих устройств.
На фиг. 20 показана схема последовательности управления горизонтирования для горизонтирования с ручным управлением стабилизирующих устройств.
На фиг. 21 показана схема последовательности управления стабилизацией.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Для подробного рассмотрения любых вариантов осуществления изобретения следует понимать, что изобретение не ограничено применениями конструкций и устройств, следующего описания или прилагаемых чертежей. Изобретение подходит для других вариантов осуществления и реализации на практике различными способами. Также следует понимать, что фразеология и терминология используются в данном документе для описания и не должны считаться ограничивающими. Использование терминов "включающий в себя", "содержащий" или "имеющий" и их вариаций в данном документе охватывает перечисленные за ними позиции и их эквиваленты, а также дополнительные позиции. Термины "установленный", "соединенный" и "спаренный" используются в широком смысле и охватывают как прямые, так и непрямые установку, соединение и спаривание. Дополнительно "соединенный" и "спаренный" не ограничиваются физическими или механическими соединением или спариванием и могут включать в себя электрическое или гидравлическое соединение или спаривание, прямое или непрямое. Также электронную связь и оповещение можно выполнять с использованием любых известных средств, включающих в себя прямые соединения, беспроводные соединения и т. д.
На фиг. 1 и 2 показана горная машина 10 непрерывной выемки, включающая в себя раму 14, систему 18 стабилизации, врубовое устройство 22, соединенное с рамой 14, и пару гусениц 24, соединенных с рамой 14, для перемещения машины 10. Перед описанием системы 18 стабилизации горная машина 10 и врубовое устройство 22 должны быть подробно описаны.
Как показано на фиг. 3 и 4, врубовое устройство 22 включает в себя врубовую головку 26, рычаг 30, образующий продольную ось 34, кронштейн 42 для прикрепления врубовой головки 26 к рычагу 30 и шарнирный узел 50, соединяющийся с горной машиной 10 и обеспечивающий поворот рычага 30 на вертикальной оси. Врубовая головка включает в себя фланец 54 и три отверстия 58 (фиг. 4), в каждом из которых съемно размещается дисковый режущий узел 66. Дисковые режущие узлы 66 разнесены друг от друга и ориентированы вдоль отдельных осей. Каждый дисковый режущий узел 66 образует продольную ось 70 вращения, и дисковые режущие узлы 66 разнесены друг от друга и установлены под углом так, что оси 70 вращения являются не параллельными и не пересекаются. Например, в варианте осуществления, показанном на фиг. 3 ось 70a центрального дискового режущего узла 66а является по существу коаксиальной с продольной осью 34 рычага 30. Ось 70b нижнего дискового режущего узла 66b расположена под углом к оси 70a центрального дискового режущего узла 66а. Ось 70c верхнего дискового режущего узла 66с расположена под углом к осям 70a, 70b центрального дискового режущего узла 66а и нижнего дискового режущего узла 66b. Данное расположение дисковых режущих узлов 66 производит ровные вырезы, когда врубовая головка 26 взаимодействует с забоем горной выработки. Дополнительные варианты осуществления могут включать в себя меньше или больше дисковых режущих узлов 66, расположенных в различных положениях.
Как показано на фиг. 5, врубовая головка 26 также включает в себя демпфирующую массу 74 в виде тяжелого материала, такого как свинец, расположенного во внутреннем объемe врубовой головки 26, окружающем три отверстия 58. При трех эксцентричных, снабженных приводом дисковых режущих узлах 66, на которые распределяется общий тяжелый вес, требуется уменьшенный общий вес и обеспечивается более легкое и более компактное конструктивное решение. В одном варианте осуществления приблизительно 6 тонн распределяется по трем узлам 66 дискового режущего элемента. Установочное расположение выполнено с возможностью реагирования на усредненные силы, приложенные каждым узлом 66 дискового режущего элемента, а пиковые силы резания абсорбируются демпфирующей массой 74, а не рычагом 30 (фиг. 3) или другой опорной конструкцией. Масса каждого узла 66 дискового режущего элемента значительно меньше демпфирующей массы 74.
В варианте осуществления, показанном на фиг. 4, рычаг 30 включает в себя верхнюю часть 82 и нижнюю часть 86. Кронштейн 42 включает в себя фланец 94. Кронштейн 42 скрепляется с рычагом 30 любым подходящим способом, например, сварным соединением. Кронштейн 42 прикрепляется к врубовой головке 26 U-образными профилями 98. Каждый профиль 98 принимает фланец 54 врубовой головки и фланец кронштейна 94 для скрепления врубовой головки 26 с кронштейном 42. Эластичная муфта (не показано) устанавливается между врубовой головкой 26 и кронштейном 42 для изоляции вибраций врубовой головки от рычага 30.
Дисковые режущие узлы 66 приводятся в действие для перемещения в эксцентричном режиме. Это выполняется, например, посредством привода дисковых режущих узлов с использованием приводного вала (не показано) с первым участком, образующим первую ось вращения, и вторым участком, образующим вторую ось вращения, радиально смещенную от первой оси вращения. Величина эксцентричного перемещения является пропорциональной сумме радиального смещения между осью вращения каждого участка вала. В одном варианте осуществления величина смещения составляет несколько миллиметров, и дисковый режущий узел 66 приводится в эксцентричное движение с относительно небольшой амплитудой на высокой частоте, такой как приблизительно 3000 об/мин.
Эксцентричное перемещение дисковых режущих узлов создает воздействие на разрабатываемый минерал, аналогичное воздействию молоткового перфоратора, обуславливая разрушение при растяжении горной породы, так что обломки горной породы смещаются от поверхности горной породы. Сила, требуемая для производства разрушения при растяжении в горной породе, имеет величину на порядок меньше величины, требуемой от обычных врубовых головок с дисковыми шарошками для удаления того же объема горной породы. Действие узла 66 дискового режущего элемента на поверхность снизу является аналогичным действию зубила, создающего растягивающие напряжения в хрупком материале, таком как горная порода, который эффективно разрушается при растяжении. В другом варианте осуществления дисковый резец 66 также нутирует, при этом ось вращения перемещается по синусоидальной траектории при вибрации дискового режущего узла 66. Для получения указанного режима ось, вокруг которой вращается приводной вал дискового режущего элемента, выполняется с угловым смещением от кожуха дискового режущего элемента.
Горная машина 10 работает, продвигая рычаг 30 к разрабатываемой породе на первое расстояние в приращениях, поворачивая рычаг 30 для резки породы и затем продвигая рычаг 30 к разрабатываемому материалу на второе расстояние в приращениях. Во время работы нижний узел 66b дискового режущего элемента первым контактирует с разрабатываемым минералом, когда рычаг 30 поворачивается в первом направлении (по часовой стрелке на виде сверху рычага 30 на фиг. 3) вокруг шарнирного узла 50. В результате отбойки нижним узлом 66b дискового режущего элемента порода падает от забоя горной выработки. При контакте центрального дискового режущего узла 66а с разрабатываемым минералом пространство ниже центрального дискового режущего узла 66а уже вскрыто нижним дисковым режущим узлом 66b дискового режущего элемента, так что порода, отбитая центральным узлом 66а дискового режущего элемента, падает от забоя горной выработки. Аналогично при взаимодействии верхнего дискового режущего узла 66с с породой пространство ниже верхнего дискового режущего узла 66с является вскрытым, и порода, отбитая верхним узлом 66с дискового режущего элемента, падает на подошву. Поскольку опережающий дисковый резец расположен в самом низу, порода, отбитая опережающими дисковыми режущим элементами, повторно не режется задним дисковым режущим элементом, что уменьшает износ дисковых режущих элементов. В дополнение дисковые режущие узлы 66 установлены так, что каждый дисковый режущий узел 66 режет на одинаковую глубину разрабатываемую породу. Указанное предотвращает возникновение неровностей в разрабатываемом минерале, которые могут препятствовать продвижению горной машины 10.
Система 18 стабилизации может использоваться в комбинации с горной машиной 10 непрерывного действия, описанной выше, или может использоваться в комбинации с горной машиной, описанной в патенте США № 7934776, зарегистрированном 31 августа 2007 г., полностью включенном в данный документ посредством ссылки. Система 18 стабилизации создает дополнительную крепь против обвала горной пород породы и также гарантирует отбойку врубовым устройством 22 на плоскости откатки относительно подошвы горной выработки.
Как также показано на фиг. 1 и 2, система 18 стабилизации включает в себя по меньшей мере одно стабилизирующее устройство 534. В показанном варианте осуществления система 18 стабилизации включает в себя четыре стабилизирующих устройства 534, по одному стабилизирующему устройству 534, установленному на каждом из четырех углов машины 10. В других вариантах осуществления машина 10 может включать в себя меньше или больше четырех стабилизирующих устройств 534, и их расположение может являться иным, чем по четырем углам машины 10.
Как показано на фиг. 6 и 7, каждое стабилизирующее устройство 534 включает в себя кожух 538, исполнительный механизм 542 горизонтирования, исполнительный механизм 546 крепи, независимый от исполнительного механизма 542 горизонтирования, и переклад 550, соединенный с концом каждого исполнительного механизма 542, 546. Как показано на фиг. 8, оба, исполнительный механизм 546 крепи и исполнительный механизм 542 горизонтирования, установлены бок о бок в кожухе 538. Исполнительные механизмы 542, 546 включают в себя измерительный преобразователь 552 перемещения (фиг. 8) для измерения положения каждого исполнительного механизма 542, 546 в кожухе 538. Исполнительный механизм 542 горизонтирования используется для горизонтирования машины 10, а исполнительный механизм 546 крепи используется в комбинации с исполнительным механизмом 542 горизонтирования для создания крепи и силы закрепления машины во время процесса разработки. В показанном варианте осуществления стабилизирующее устройство 534 стратегически установлено относительно машины так, что обеспечивает максимальные возможности создания крепи и оптимального горизонтирования. В дополнительных вариантах осуществления (описаны ниже) каждое стабилизирующее устройство 534 может также включать в себя одну или несколько дистанцирующих прокладок 554 (фиг. 12 и 13).
В показанном варианте осуществления исполнительные механизмы 542, 546 являются гидравлическими цилиндрами двустороннего действия, и гидравлическое давление селективно прикладывается к одной из сторон поршня 544, 548 (фиг. 8) для выдвижения или втягивания цилиндров. В других вариантах осуществления исполнительные механизмы 542, 546 могут являться гидравлическими исполнительными механизмами другого типа, пневматическими исполнительными механизмами, электрическими исполнительными механизмами (например, с переключателем или реле, пьезоэлектрическим исполнительным механизмом или соленоидом), механическими исполнительными механизмами (например, винтовым или кулачковым исполнительным механизмом) или другими механизмами или системами другого типа для перемещения компонента горной машины.
Как показано на фиг. 9-11, переклад 550 имеет широкий профиль или занимаемую площадь, обеспечивающую увеличенную площадь крепи. В показанном варианте осуществления переклад 550 является в общем треугольным (с усеченными углами). Переклад 550 включает в себя первую сторону 558 для взаимодействия с висячим боком (кровля выработки) или лежачим боком (подошва горной выработки), вторую сторону 562, противоположную первой стороне 558, пару рукояток 566, соединенных со второй стороной 562, гнездо 570 (фиг. 11) установленное на второй стороне 562 и установочную поверхность 574, окружающую гнездо 570. Рукоятки 566 создаются для манипуляций с подкладками 550 и их транспортировки для установки на стабилизирующее устройство 534. В одном варианте осуществления переклад 550 выполнен из стеклопластика, и первая сторона 558 оклеена полиуретановым фрикционным материалом. Полиуретановый материал действует в качестве фрикционной поверхности для защиты переклада 550 от повреждений.
Как показано на фиг. 9 и 11, переклад 550 соединяется с каждым исполнительным механизмом 542, 546 (фиг. 9) соединительным узлом 578. В показанном варианте осуществления соединительный узел 578 является соединительной муфтой с шаровым элементом и шаровым гнездом. Как показано на фиг. 11, соединительный узел 578 включает в себя шаровой элемент 586, фланец 590 (который может выполняться из полиуретана) и установочный штифт 594. Шаровой элемент 586 включает в себя первый конец 598, имеющий круглую форму, второй конец 606 и паз 614, проходящий по периметру вокруг шарового элемента 586 между первым концом 598 и вторым концом 606. Первый конец 598 встает в гнездо 570 переклада для обеспечения поворота гнезда 570 вокруг шарового элемента 586. Второй конец 606 имеет цилиндрическую форму и включает в себя продольный канал 618, стыкующийся с исполнительными механизмами 542, 546.
Фланец 590 соединительного узла 578 скрепляется с установочной поверхностью 574 на перекладе 550 и устанавливается в паз 614 шарового элемента 586. Данное устройство обеспечивает поворот шарового элемента 586 относительно гнезда 570 в известной мере, но поворот шарового элемента 586 ограничивается фланцем 590. Соединительный узел 578 делает стабилизирующие устройства 534 самоустанавливающимися, так что когда исполнительные механизмы 542, 546 выдвигаются, переклад 550 перемещается относительно шарового соединения 578 для установки на плоскость кровли или подошвы. В дополнение, когда исполнительные механизмы 542, 546 убираются от подошвы или кровли, переклад 550 сохраняет свое горизонтальное положение. Канал 618 шарового элемента 586 перемещается по концу одного из исполнительных механизмов 542, 546 и скрепляется установочным штифтом 594. Таким образом, переклад 550 скрепляется с каждым исполнительным механизмом 542 горизонтирования и исполнительным механизмом 546 крепи.
Переклад 550 повышает эффективность стабилизирующих устройств 534. Переклад 550 можно выполнить из композитного материала, а не из стали, для получения уменьшенного веса и упрощения манипуляций с перекладом. Переклад 550 несет увеличенную нагрузку и перекрывает площадь больше, чем предыдущие конструкции. Переклад 550 является долговечным и может упруго деформироваться, что помогает выдерживать ударные волны, обусловленные взрывной отбойкой. Композитный материал для переклада 550 является инертным и устойчивым к коррозии. Данные факторы обеспечивают композитному перекладу 550 увеличенный срок службы, уменьшая общую стоимость стабилизирующих устройств 534. В дополнение переклад 550 прикладывает стабилизирующую силу на лежачий бок, а также кровлю. Переклад 550 может приспосабливаться к неровностям кровли и подошвы выработки благодаря адаптивному соединительному узлу 578.
Как показано на фиг. 12, каждая дистанцирующая прокладка 554 включает в себя первую сторону 622 и ребра жесткости 626, противоположные первой стороне 622, и установочные отверстия 630, размещенные в ребрах жесткости 626. Первая сторона 622 выполнена с возможностью взаимодействия с кровлей или подошвой выработки. Ребра жесткости 626 включают в себя многочисленные пластины 634 для несения требуемой нагрузки. Как показано на фиг. 13, дистанцирующая прокладка 554 может устанавливаться между перекладом 550 и кровлей или подошвой выработки. В дополнительных вариантах осуществления дистанцирующая прокладка 554 может соединяться напрямую с одним из исполнительных механизмов 542, 546 соединительным узлом, аналогичным соединительному узлу 578, и переклад 550 затем устанавливается между дистанцирующей прокладкой 554 и подошвой или кровлей горной выработки.
Многочисленные дистанцирующие прокладки 554 могут укладываться стопой на первой стороне 558 переклада 550 для опирания на кровлю или подошву выработки. Установочные отверстия 630 для каждой дистанцирующей прокладки 554 совмещаются, и штифт (не показано) устанавливается в отверстие 630 для гарантии сохранения дистанцирующих прокладок 554 совмещенными друг с другом в колонне и исключения их бокового скольжения. В других вариантах осуществления дистанцирующая прокладка 554 может не включать в себя каких-либо установочных отверстий. В одном варианте осуществления дистанцирующие прокладки 554 выполняются из стали и снабжаются покрытием из материала с высоким коэффициентом трения. Дистанцирующие прокладки 554 несут большую нагрузку на сжатие и имеют уменьшенную массу для получения соответствующего соотношения прочности и веса. Уменьшение массы обеспечивает упрощенные манипуляции и транспортировку.
В другом варианте осуществления (не показано), стабилизирующие устройства 534 включают в себя боковые исполнительные механизмы, ориентированные в горизонтальном направлении для создания крепи боковых стенок выработки. Стабилизирующие устройства в данном случае должны включать в себя признаки, аналогичные стабилизирующим устройствам 534, описанным выше, в том числе переклад 550 и соединительный узел 578.
Как показано на фиг. 14-16, стабилизирующие устройства 534 выполняют как функции горизонтирования, так и стабилизации для горной машины 10 непрерывной выемки. Вначале, когда горная машина 10 устанавливается вблизи забоя, подлежащего разработке, как исполнительные механизмы 546 создания крепи, так и исполнительные механизмы 542 горизонтирования втянуты (фиг. 6). Исполнительные механизмы 542 горизонтирования затем выдвигаются (фиг. 14) для ориентирования машины 10 под углом, подходящим для выполнения горных работ. Переклады 550 исполнительных механизмов 542 горизонтирования входят во взаимодействие с подошвой горной выработки. Затем для обеспечения стабилизации горной машины 10 непрерывной выемки во время отбойки исполнительные механизмы 546 создания крепи выдвигаются так, что переклады 550 входят во взаимодействие с кровлей выработки (фиг. 15). В дополнение, как показано на фиг. 16, одну или несколько дистанцирующих прокладок 554 можно устанавливать между каждым перекладом 550 и кровлей выработки и подошвой горной выработки.
Стабилизирующими устройствами 534 управляет система 638 управления, пример системы 638 управления показан на фиг. 17. Хотя система 638 управления описана ниже для гидравлической системы, аналогичную систему управления можно применять с любой из систем силового привода различных типов.
В некоторых вариантах осуществления система 638 управления ненапрямую измеряет физическую силу, действующую между исполнительными механизмами 542, 546 и поверхностью горной выработки. В частности, параметры исполнительных механизмов 542, 546 могут создавать один или несколько индикаторов физической силы, действующей между исполнительными механизмами 542, 546 и поверхностью горной выработки. Система 638 управления может определять, равны ли данные индикаторы заданным значениям или превосходят заданные значения для определения не напрямую, достигла ли физическая сила, действующая между исполнительными механизмами 542, 546 и поверхностью горной выработки, заданного порогового значения. Например, если исполнительные механизмы 542, 546 включают в себя гидравлические цилиндры, система 638 управления может использовать значение давления исполнительных механизмов 542, 546 как индикатора физической силы, приложенной между исполнительными механизмами 542, 546 и поверхностью горной выработки. В частности, система 638 управления может выдвигать исполнительные механизмы 542, 546 к поверхности горной выработки до нагнетания до заданного значения давления в исполнительных механизмах 542, 546. Система 638 управления может использовать аналогичное значение давления как индикатор физической силы, действующей между исполнительными механизмами 542, 546 и поверхностью горной выработки, когда исполнительные механизмы 542, 546 включают в себя пневматические исполнительные механизмы. В других вариантах осуществления система 638 управления может использовать параметры тока, питающего исполнительные механизмы 542 и 546, значение силы, действующей между компонентами исполнительных механизмов 542 и 546, или физическое положение компонентов исполнительных механизмов 542 и 546 как индикатор физической силы, действующей между исполнительными механизмами 542, 546 и поверхностью горной выработки. Другие компоненты машины 10, такие как измерительные преобразователи перемещения или инклинометр, могут также создавать один или несколько индикаторов обратной связи для физической силы, действующей между исполнительными механизмами 542, 546 и поверхностью горной выработки.
В показанном варианте осуществления система 638 управления включает в себя манифольд 642 управления, установленный отдельно от кожуха 538 стабилизирующего устройства, измерительные преобразователи 552 перемещения (фиг. 8), измерительные преобразователи 692 давления (показано схематично на фиг. 17), инклинометр (не показано) и программируемый логический контроллер ("ПЛК"; не показано). Измерительные преобразователи 552 перемещения и измерительные преобразователи 692 давления установлены на исполнительных механизмах 542, 546 и измеряют положение и давление исполнительного механизма соответственно для передачи данных обратной связи по силам, действующим между исполнительными механизмами 542, 546 и поверхностью горной выработки, в систему 638 управления. Инклинометр измеряет угол наклона машины 10 в обоих, продольном и поперечном, направлениях. В других вариантах осуществления другие датчики можно использовать для измерения индикатора физической силы, действующей между исполнительными механизмами 542, 546 и поверхностью горной выработки.
Как показано на фиг. 17, манифольд 642 управления включает в себя систему 650 горизонтирования и систему 654 создания крепи. Система 650 горизонтирования включает в себя быстродействующий электромагнитный сервоклапан или пропорциональный клапан 662, имеющий бортовой электронный блок управления и отказобезопасное положение, клапан 666 снижения давления, двухпозиционный клапан 670 регулировки направления, обратный клапан 674 c сервоуправлением и клапан 678 сброса давления. Данные компоненты связаны с исполнительным механизмом 542 горизонтирования. Система 654 создания крепи включает в себя первый разрешительный клапан 682 для выдвижения исполнительного механизма 546 крепи, второй разрешительный клапан 686 для втягивания исполнительного механизма 546 крепи и обратный клапан 690 c сервоуправлением. Данные компоненты связаны с каждым исполнительным механизмом 546 крепи. Разрешительные клапаны 682 и 686 являются двухпозиционными клапанами регулировки направления. Система 654 создания крепи рассмотрена подробно ниже после описания системы 646 горизонтирования.
Пропорциональный клапан 662 управляет направлением и величиной расхода подачи масла в каждый исполнительный механизм 542, обеспечивая точную регулировку подачи масла на полнопроходную сторону исполнительных механизмов 542 горизонтирования. Клапан 666 уменьшения давления поддерживает постоянное соединение между штоковой полостью исполнительных механизмов 542 горизонтирования и основным устройством подачи давления. Клапан 666 уменьшения давления устанавливает равновесное давление, которое используется для втягивания исполнительных механизмов 542 горизонтирования и опускания горной машины 10 на ее гусеницы 24, когда требуется. В одном варианте осуществления равновесное давление составляет приблизительно 20 бар (2 МПа). Хотя вес машины 10 является достаточным для опускания машины 10, когда пропорциональный клапан 662 стравливает точный объем масла, исполнительный механизм 542 горизонтирования поднимается от подошвы во втянутое положение перед получением машиной 10 возможности перемещаться на гусеницах для выполнения горных работ.
Когда требуемое положение машины достигнуто, исполнительный механизм 542 горизонтирования стопорится в таком положении обратным клапаном 674 c сервоуправлением. Двухпозиционный, трехходовой клапан 670 регулировки направления управляет подачей масла в пропорциональный клапан 662 и также подает управляющее давление в обратный клапан 674 c сервоуправлением. Клапан 670 регулировки направления приводится в действие, когда требуется какая-либо регулировка, и отключается, как только требуемое положение достигнуто. Напрямую управляемый клапан 678 сброса давления ограничивает направленную вниз толкающую силу (то есть силу подъема) каждого исполнительного механизма 542. Клапан 678 сброса давления имеет уставку на оптимальное значение давления для ограничения любых пиков давления, которые могут возникать во время работы в штатном или нештатном режиме.
Четыре исполнительных механизма 542 горизонтирования выполнены с возможностью либо индивидуального или группового дистанционного управления. Например, для перемещения одного исполнительного механизма 542 горизонтирования оператор может выбрать соответствующий исполнительный механизм 542 на пульте дистанционного управления и привести в действие джойстик в требуемом направлении перемещения (то есть вверх или вниз).
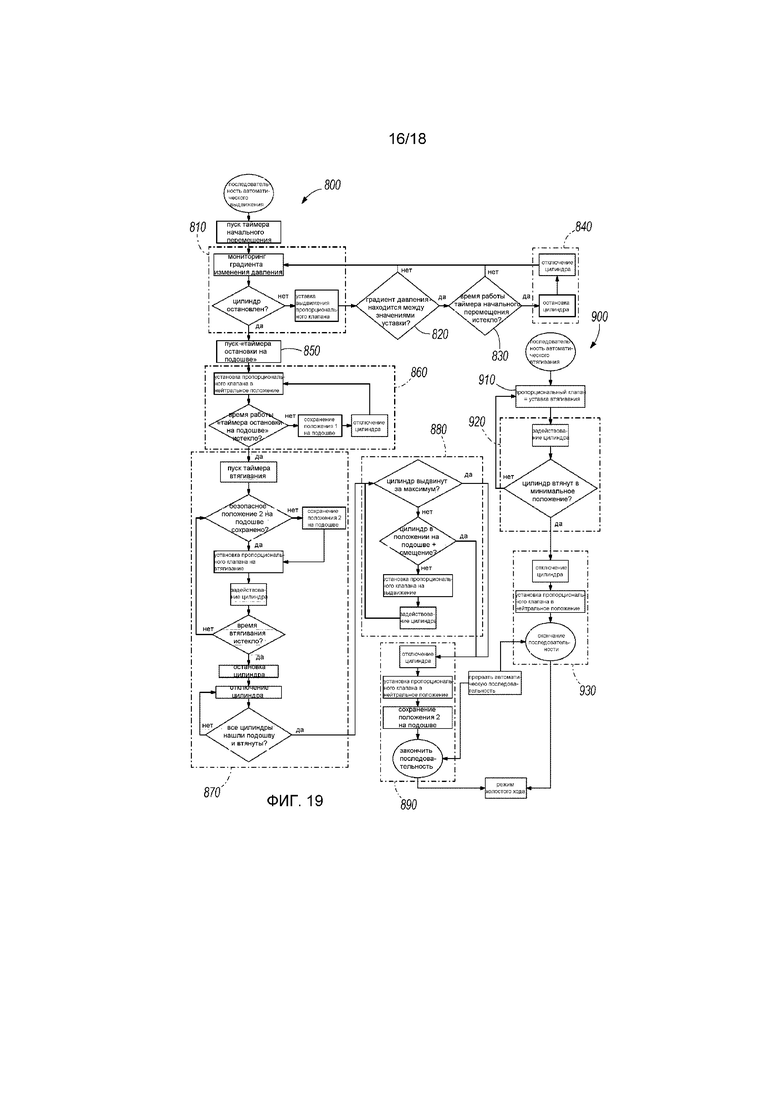
Горная машина 10 непрерывной выемки включает в себя логический контроллер (не показано) для управления горизонтированием машины 10. Как показано на фиг. 18, логический контроллер включает в себя последовательность 700 селекции горизонтирования для выбора между многочисленными последовательностями горизонтирования для исполнительного механизма 542 горизонтирования. В показанном варианте осуществления логический контроллер включает в себя последовательность 800 автоматического выдвижения (фиг. 19), последовательность 900 автоматического втягивания (фиг. 19) и последовательность 1000 индивидуального горизонтирования (фиг. 20).
Как показано на фиг. 18, последовательность селекции горизонтирования 700 включает в себя первый этап 710 установки всех пропорциональных клапанов 662 и клапанов 670 регулировки направления в выключенное положение. На следующем этапе 720 пропорциональные клапаны 662 устанавливаются в нейтральное положение, выбирается либо индивидуальное или автоматическое горизонтирование и выбирается направление для перемещения исполнительных механизмов 542 горизонтирования. Если выбран автоматический режим и направление ВНИЗ (этап 730), контроллер инициирует последовательность 800 автоматического выдвижения (фиг. 19). Если выбран автоматический режим и направление ВВЕРХ (этап 740), контроллер инициирует последовательность 900 автоматического втягивания (фиг. 19). Если выбирается любая из кнопок исполнительных механизмов, указывающая индивидуальное горизонтирование, то контроллер инициирует последовательность 1000 индивидуального горизонтирования, если такое приемлемо (фиг. 20). Таким образом, горизонтирование горной машины 10 выполняется автоматически системой 638 управления в ответ на команду контроллера. В одном варианте осуществления оператор нажимает комбинацию кнопок на пульте дистанционного управления вместе с перемещением джойстика в требуемом направлении (вверх или вниз) для инициирования последовательности команд для создания или уборки крепи машины 10.
Когда запущена последовательность 800 автоматического выдвижения, исполнительные механизмы 542 горизонтирования приводятся в движение вниз до достижения заданного значения индикатора физической силы, действующей между исполнительными механизмами 542 и поверхностью горной выработки. Как показано на фиг. 19, в последовательности 800 автоматического выдвижения вначале пропорциональные клапаны 662 устанавливаются в положение для приведения в действие исполнительных механизмов 542 горизонтирования (этап 810). Каждый исполнительный механизм 542 горизонтирования выдвигается с заданной скоростью, и система определяет, когда каждый соответствующий переклад 550 входит во взаимодействие с подошвой горной выработки, обнаруживая момент достижения индикатором заданного значения или входа в определенный диапазон значений (этап 820). В показанном варианте осуществления индикатором является градиент давления в исполнительном механизме 542 горизонтирования. Осуществляется мониторинг давления с использованием, например, дискретной первой производной измерений давления с измерительного преобразователя 692 давления для каждого исполнительного механизма 542 горизонтирования. Начальное перемещение не учитывается в течение программируемого периода времени (этап 830), поскольку кривая изменения давления во время начального перемещения каждого исполнительного механизма 542 является аналогичной кривой изменения давления, получаемой, когда переклад 550 взаимодействует с подошвой.
Когда исполнительные механизмы 542 горизонтирования достигают подошвы горной выработки, исполнительные механизмы 542 горизонтирования останавливаются (этап 840) и таймер задержки времени запускается для обеспечения точного измерения смещения исполнительных механизмов 542 (этап 850). Если заданное значение индикатора достигается за пределами длины максимального выдвижения или времени максимального выдвижения, то последовательность 800 автоматического выдвижения прекращается. Если один или несколько исполнительных механизмов 542 горизонтирования не могут обнаружить подошву в определенное время, то выдвижение всех стабилизирующих устройств 534 останавливается и последовательность 800 автоматического выдвижения прекращается. В любом из случаев (то есть если все стабилизирующие устройства 534 касаются подошвы или если любые исполнительные механизмы 542 горизонтирования отказывают) оператор получает, например, световую индикацию или индикацию с пульта дистанционного управления. Если исполнительный механизм 542 горизонтирования не смог коснуться подошвы, оператор может индивидуально управлять соответствующим исполнительным механизмом 542.
Когда все исполнительные механизмы 542 горизонтирования входят во взаимодействие с подошвой, оператор может регулировать индивидуальные исполнительные механизмы 542 горизонтирования с пульта дистанционного управления. Если любой исполнительный механизм 542 горизонтирования регулируется вручную, система 638 управления считает машину 10 негоризонтированной. Оператор может вводить последовательность команд с пульта дистанционного управления для передачи инструкций системе управления, что машина прошла горизонтирование вручную и готова вести работу в нормальном режиме.
Два параметра влияют на чувствительность системы 638 управления по нахождению подошвы: 1) диапазон индикатора физической силы, действующей между исполнительными механизмами 542 и поверхностью горной выработки (то есть градиент давления в показанном варианте осуществления) и 2) величина временного интервала, в котором индикатор находится в западном диапазоне. Система 638 управления определяет, обнаружена ли подошва каждым исполнительным механизмом 542 горизонтирования, измеряя смещение исполнительных механизмов 542 и обнаруживая, есть ли соответствие обоим параметрам. Смещение может вычисляться с помощью измерения времени, требуемого для выдвижения исполнительного механизма 542 до точки, в которой индикатор физической силы достигает заданного значения. Положение, в котором исполнительный механизм взаимодействует с поверхностью горной выработки, определяется с помощью измерения либо параметра, связанного со временем работы или длиной выдвижения исполнительных механизмов. После обнаружения подошвы исполнительным механизмом 542 горизонтирования каждый исполнительный механизм 542 втягивается на несколько миллиметров, так что сила, приложенная индивидуальным исполнительным механизмом 542, не влияет на отсчеты для других исполнительных механизмов 542 горизонтирования.
Когда каждый из четырех исполнительных механизмов 542 горизонтирования обнаруживает и сохраняет положение подошвы в запоминающем устройстве ПЛК (не показано) системы 638 управления, исполнительные механизмы 542 остаются неподвижными в течение заданного период времени (этап 860) в положении "подошва обнаружена". Исполнительные механизмы 542 горизонтирования затем втягиваются на заданный период времени и затем останавливаются (этап 870). Затем исполнительные механизмы 542 горизонтирования выдвигаются до достижения каждым исполнительным механизмом 542 положения "подошва обнаружена" плюс требуемое расстояние смещения (этап 880). Если исполнительный механизм 542 горизонтирования выдвигается за максимальное значение диапазона выдвижения, последовательность 800 автоматического выдвижения прекращается. Когда требуемое положение достигнуто, пропорциональный клапан 662 устанавливается в нейтральное положение для остановки исполнительных механизмов 542 горизонтирования (этап 890).
Последовательность 900 автоматического втягивания используется для вывода горной машины 10 из положения горизонтирования (то есть установки машины 10 обратно на гусеницы 24). Как показано на фиг. 19, последовательность автоматического втягивания включает в себя первый этап 910 приведения в действие пропорционального клапана 662 на уставке втягивания. Данное обеспечивает одновременное втягивание вверх исполнительных механизмов 542 горизонтирования (этап 920). Когда все исполнительные механизмы 542 горизонтирования приходят в положение минимума, последовательность заканчивается (этап 930).
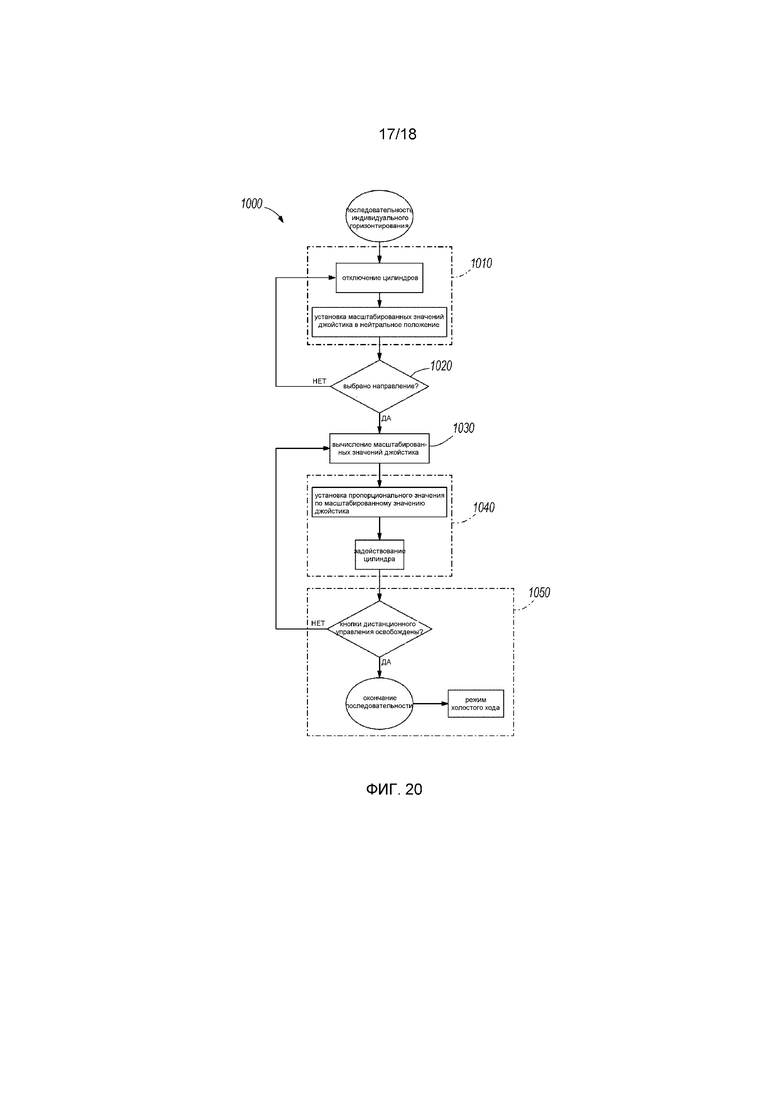
Исполнительные механизмы 542 горизонтирования могут опускаться индивидуально для предотвращения смещения центра тяжести горной машины 10. Показанная на фиг. 20, последовательность 1000 индивидуального горизонтирования включает в себя первый этап 1010 отключения всех исполнительных механизмов 542 горизонтирования и установки значений масштабированного джойстика в нейтральное положение. На следующем этапе 1020 выбирается направление перемещения исполнительных механизмов 542 горизонтирования. Затем вычисляется масштабированное значение джойстика для выбранного направления (этап 1030). Пропорциональный клапан 662 затем устанавливается по масштабированному значению джойстика и индивидуальный исполнительный механизм 542 горизонтирования приводится в действие (этап 1040). Когда исполнительный механизм 542 горизонтирования выполнил горизонтирование, исполнительный механизм 542 останавливается (этап 1050). Данный процесс повторяется до установки на нужный уровень всех исполнительных механизмов 542 горизонтирования.
После выполнения горизонтирования горной машины 10 приводятся в действие исполнительные механизмы 546 крепи для установления взаимодействия с кровлей и обеспечения адекватного закрепления машины 10 во время отбойки. В одном варианте осуществления система 638 управления блокируется для обеспечения входа во взаимодействие исполнительных механизмов 546 крепи с кровлей по завершении последовательности горизонтирования, а не наоборот, для предотвращения повреждения гусениц 24.
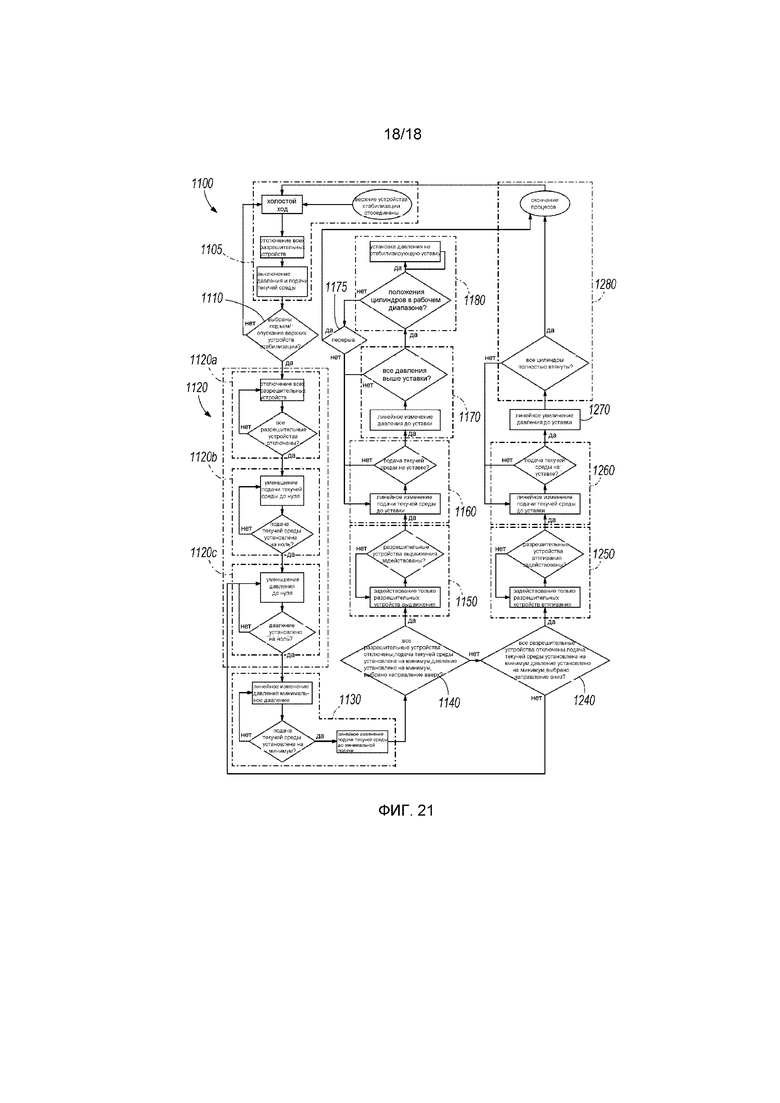
Как показано на фиг. 21, контроллер включает в себя последовательность 1100 автоматической стабилизации для стабилизации исполнительных механизмов 546 крепи, прижатых к висячему боку или кровле. Из режима холостого хода (этап 1105) инициируется стабилизационная последовательность (этап 1110), и контроллер отключает первый разрешительный клапан 682 и второй разрешительный клапан 686 для каждого исполнительного механизма 546 крепи (этап 1120a). В показанном варианте осуществления контроллер уменьшает подачу текучей среды до нуля (этап 1120b) и уменьшает давление до нуля (этап 1120c). Контроллер затем линейно или постепенно увеличивает давление до минимального уровня давления и плавно повышает подачу до минимального уровня (этап 1130). Затем контроллер определяет, выбрана ли последовательность "подъем" (этап 1140). Как описано выше, оператор может приводить в действие исполнительные механизмы 546 крепи, например, нажимая комбинацию кнопок на пульте дистанционного управления вместе с перемещением джойстика в требуемом направлении (то есть вверх или вниз). Все исполнительные механизмы 546 крепи активируются одновременно во время стабилизационной последовательности 1100.
Если выбрана последовательность подъема, контроллер активирует первые разрешительные клапаны 682 (этап 1150) для поддержания установленной скорости выдвижения. В показанном варианте осуществления контроллер также разблокирует обратные клапаны 690 с сервоуправлением, при этом обеспечивая линейное увеличение подачи до заданного значения или уставки (этап 1160) и линейное увеличение давления до заданного значения или уставки (этап 1170).
В показанном варианте осуществляется мониторинг давлений в исполнительных механизмах 546 крепи при их выдвижении. Система 638 управления обнаруживает, что переклад 550 входит во взаимодействие с кровлей, когда по меньшей мере один индикатор силы, действующей между исполнительным механизмом 546 и кровлей, достигает заданного значения. Данный индикатор может включать в себя, например, давление в исполнительном механизме 546. Система 638 управления сравнивает измеренные время выдвижения и длину выдвижения исполнительных механизмов 546 с максимальными разрешенными временем выдвижения и длиной выдвижения соответственно. То есть если давление стабилизирующего устройства не увеличивается до заданного значения давления в заданном для исполнительного механизма диапазоне выдвижения и в заданное время, операция временно прерывается (этап 1175). При этом обеспечивается остановка всех стабилизирующих устройств 534 и последовательность 1100 автоматической стабилизации прекращается.
В показанном варианте осуществления, когда все переклады 550 касаются кровли, контроллер проверяет, находятся ли положения исполнительных механизмов 546 крепи в рабочем диапазоне. Если да, то индикатор увеличивается до достижения заданного значения (этап 1180). В показанном варианте осуществления нагнетается дополнительное давление до достижения заданного давления уставки. Давление уставки поддерживается механически, независимо от системы 638 управления. Во время последовательности управления работой машины "автоматическая отбойка" или "обнаружение забоя" осуществляется мониторинг индикаторов исполнительного механизма (то есть давления и положения в показанном варианте осуществления). Если индикатор силы, действующей между исполнительным механизмом 546 и кровлей, падает ниже заданного значения, то горная машина 510 считается не имеющей крепи, и все последовательности команд прерываются. Когда все исполнительные механизмы 546 крепи взаимодействуют с кровлей, стабилизирующие устройства 534 автоматически повторно приводятся в действие до достижения индикатором силы для каждого исполнительного механизма заданного значения. Когда получено заданное значение во всех исполнительных механизмах 546 крепи, оператор принимает, например, световую индикацию или индикацию с пульта дистанционного управления. В данной точке могут выполняться другие операции машины (такие как, например, "обнаружение забоя" или последовательность автоматической отбойки). Поскольку полная сила исполнительных механизмов 546 не прикладывается до занятия нужного положения всеми исполнительными механизмами 546 крепи, сила распределяется по кровле равномерно.
Если последовательность "подъем" не выбрана, контроллер определяет, выбрана ли последовательность "опускание" (этап 1240). Последовательность "опускание" может выбираться с приведением в действие пульта дистанционного управления (в том числе, например, перемещением джойстика вниз в комбинации с нажатием других кнопок пульта дистанционного управления) для втягивания исполнительных механизмов 546 крепи. Если выбрана последовательность "опускание", контроллер активирует вторые разрешительные клапаны 686 (этап 1250) для поддержания установленной скорости втягивания. Контроллер также разблокирует обратные клапаны 690. В показанном варианте осуществления данное разрешает контроллеру линейное увеличение скорости подачи до заданного значения или точки уставки (этап 1260) и затем линейное увеличение давления до заданного значения или точки уставки (этап 1270). Исполнительные механизмы 546 крепи затем втягиваются на заданное расстояние (этап 1280).
Таким образом, изобретением создана, кроме прочего, стабилизационная система для горной машины. Хотя изобретение подробно описано для некоторых предпочтительных вариантов осуществления, его вариации и модификации существуют в объеме и сущности одного или нескольких описанных независимых аспектов изобретения. Различные независимые признаки и независимые преимущества изобретения изложены ниже в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СТАБИЛИЗАЦИИ ДЛЯ ГОРНОЙ МАШИНЫ | 2012 |
|
RU2618005C2 |
| АВТОМАТИЗИРОВАННЫЕ ОПЕРАЦИИ ГОРНОЙ МАШИНЫ | 2012 |
|
RU2617498C2 |
| МАШИНА, НЕСУЩАЯ РЕЖУЩЕЕ ГОРНУЮ ПОРОДУ УСТРОЙСТВО | 2017 |
|
RU2753485C2 |
| Врубовая машина | 2018 |
|
RU2761230C2 |
| Горная машина | 2016 |
|
RU2745395C2 |
| Горная машина (варианты), способ разработки материала стенки выработки и дисковый резец | 2013 |
|
RU2645017C2 |
| ГОРНАЯ МАШИНА С ДВИЖУЩИМИСЯ ДИСКОВЫМИ РЕЗЦАМИ (ВАРИАНТЫ) | 2008 |
|
RU2494252C2 |
| ВРУБОВАЯ МАШИНА | 1990 |
|
RU2046186C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ НАД РАБОТОЙ МЕХАНИЗИРОВАННОЙ СЕКЦИИ КРЕПИ | 2020 |
|
RU2810049C2 |
| ГОРНАЯ МАШИНА С МНОЖЕСТВОМ ВРУБОВЫХ ГОЛОВОК | 2017 |
|
RU2749518C2 |



Группа изобретений относится к способу стабилизации горной машины относительно первой поверхности горной выработки и второй поверхности горной выработки, противоположной первой поверхности горной выработки, а также к горной машине. Способ включает выдвижение первого исполнительного механизма к первой поверхности горной выработки до достижения заданного значения по меньшей мере одним индикатором силы, действующей между исполнительным механизмом и первой поверхностью горной выработки. Втягивание первого исполнительного механизма в течение первого заданного времени. Выдвижение первого исполнительного механизма в течение первого заданного времени плюс дополнительное время. Выдвижение второго исполнительного механизма ко второй поверхности горной выработки до достижения заданного значения по меньшей мере одним индикатором силы, действующей между вторым исполнительным механизмом и второй поверхностью горной выработки. Втягивание второго исполнительного механизма в течение второго заданного времени и выдвижение второго исполнительного механизма в течение второго заданного времени плюс дополнительное время. Горная машина содержит первый исполнительный механизм для стабилизации рамы относительно поверхности горной выработки, причем первый исполнительный механизм соединяется с рамой и включает в себя первый конец, выдвигающийся в первом направлении для взаимодействия с поверхностью горной выработки. Контроллер, соединенный с первым исполнительным механизмом и выполненный с возможностью управления первым исполнительным механизмом, при этом контроллер содержит таймер, определяющий время, необходимое для выдвижения первого конца в положение, в котором по меньшей мере один индикатор силы, действующей между первым исполнительным механизмом и поверхностью горной выработки, достигает заранее заданного значения. При этом контроллер выполнен с возможностью управления выдвижением первого конца на основе указанного определенного времени. Технический результат заключается в улучшении стабилизации горной машины. 2 н. и 16 з.п. ф-лы, 21 ил.
1. Способ стабилизации горной машины относительно первой поверхности горной выработки и второй поверхности горной выработки, противоположной первой поверхности горной выработки, содержащий:
выдвижение первого исполнительного механизма к первой поверхности горной выработки до достижения заданного значения по меньшей мере одним индикатором силы, действующей между исполнительным механизмом и первой поверхностью горной выработки;
втягивание первого исполнительного механизма в течение первого заданного времени; и
выдвижение первого исполнительного механизма в течение первого заданного времени плюс дополнительное время,
выдвижение второго исполнительного механизма ко второй поверхности горной выработки до достижения заданного значения по меньшей мере одним индикатором силы, действующей между вторым исполнительным механизмом и второй поверхностью горной выработки;
втягивание второго исполнительного механизма в течение второго заданного времени и
выдвижение второго исполнительного механизма в течение второго заданного времени плюс дополнительное время.
2. Способ по п. 1, дополнительно содержащий сохранение значения первого параметра, соответствующего положению первого исполнительного механизма, в котором по меньшей мере один индикатор силы, действующей между первым исполнительным механизмом и первой поверхностью горной выработки, достигает заданного значения.
3. Способ по п. 2, дополнительно содержащий сравнение сохраненного значения первого параметра с максимальным разрешенным значением параметра и
прерывание способа стабилизации горной машины, если сохраненное значение время первого параметра больше максимального разрешенного значения параметра.
4. Способ по п. 2, в котором сохранение значения первого параметра содержит сохранение времени выдвижения первого исполнительного механизма в положение, в котором по меньшей мере один индикатор силы, действующей между первым исполнительным механизмом и первой поверхностью горной выработки, достигает заданного значения.
5. Способ по п. 2, в котором время выдвижения первого исполнительного механизма включает в себя выдвижение первого исполнительного механизма с заданной скоростью.
6. Способ по п. 1, в котором первый исполнительный механизм представляет собой гидравлический цилиндр, при этом по меньшей мере один индикатор силы, действующей между первым исполнительным механизмом и первой поверхностью горной выработки, представляет собой давление в цилиндре.
7. Горная машина, содержащая
раму;
врубовую головку, подвижно соединенную с рамой,
первый исполнительный механизм для стабилизации рамы относительно поверхности горной выработки, причем первый исполнительный механизм соединяется с рамой и включает в себя первый конец, выдвигающийся в первом направлении для взаимодействия с поверхностью горной выработки,
контроллер, соединенный с первым исполнительным механизмом и выполненный с возможностью управления первым исполнительным механизмом, при этом контроллер содержит таймер, определяющий время, необходимое для выдвижения первого конца в положение, в котором по меньшей мере один индикатор силы, действующей между первым исполнительным механизмом и поверхностью горной выработки, достигает заранее заданного значения, при этом контроллер выполнен с возможностью управления выдвижением первого конца на основе указанного определенного времени.
8. Горная машина по п. 7, дополнительно содержащая второй исполнительный механизм для стабилизации рамы относительно поверхности горной выработки, причем второй исполнительный механизм соединяется с рамой и включает в себя первый конец, выдвигающийся во втором направлении для взаимодействия с поверхностью горной выработки, при этом контроллер соединен со вторым исполнительным механизмом и выполнен с возможностью управления вторым исполнительным механизмом, при этом контроллер выполнен с возможностью определения времени, необходимого для выдвижения первого конца второго исполнительного механизма в положение, в котором по меньшей мере один индикатор силы, действующей между вторым исполнительным механизмом и поверхностью горной выработки, достигает заранее заданного значения, при этом контроллер выполнен с возможностью управления выдвижением первого конца второго исполнительного механизма на основе указанного определенного времени.
9. Горная машина по п. 7, дополнительно содержащая второй исполнительный механизм для стабилизации рамы относительно поверхности горной выработки, причем второй исполнительный механизм соединяется с рамой и включает в себя первый конец, выдвигающийся во втором направлении для взаимодействия со второй поверхностью горной выработки, при этом контроллер соединен со вторым исполнительным механизмом и выполнен с возможностью управления вторым исполнительным механизмом, при этом контроллер выполнен с возможностью определения времени, необходимого для выдвижения первого конца второго исполнительного механизма в положение, в котором по меньшей мере один индикатор силы, действующей между вторым исполнительным механизмом и второй поверхностью горной выработки, достигает заранее заданного значения, при этом контроллер выполнен с возможностью управления выдвижением первого конца второго исполнительного механизма на основе указанного определенного времени.
10. Горная машина по п. 7, дополнительно содержащая переклад, шарнирно соединяющийся с первым концом первого исполнительного механизма и выполненный с возможностью взаимодействия с поверхностью горной выработки.
11. Горная машина по п. 10, в которой переклад шарнирно соединяется с первым концом первого исполнительного механизма шаровым шарнирным соединением.
12. Горная машина по п. 10, в которой переклад имеет по существу треугольный профиль.
13. Горная машина по п. 7, дополнительно содержащая дистанцирующую прокладку, установленную между первым концом первого исполнительного механизма и первой поверхностью горной выработки.
14. Горная машина по п. 7, в которой первый исполнительный механизм является гидравлическим цилиндром, при этом по меньшей мере один индикатор силы, действующей между первым исполнительным механизмом и первой поверхностью горной выработки, представляет собой давление в цилиндре.
15. Горная машина по п. 7, в которой первый исполнительный механизм является гидравлическим цилиндром и дополнительно содержит клапан переключения направления для управления подачей текучей среды в первый исполнительный механизм и из него для выдвижения и втягивания первого исполнительного механизма.
16. Горная машина по п. 7, в которой врубовая головка выполнена с возможностью поворота вокруг оси, по существу перпендикулярной поверхности горной выработки, и включает в себя по меньшей мере один вибрирующий дисковый резец.
17. Горная машина по п. 7, дополнительно содержащая датчик, соединенный с контроллером, причем датчик выполнен с возможностью определения по меньшей мере одного индикатора силы, действующей между первым исполнительным механизмом и поверхностью горной выработки.
18. Горная машина по п. 7, в которой датчик является датчиком давления, определяющем давление в цилиндре.
| Устройство автоматического управления направленным движением горной машины | 1974 |
|
SU517699A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ ГОРИЗОНТА РЕЗАНИЯ ДОБЫЧНОЙ ГОРНОЙ УСТАНОВКИ | 1995 |
|
RU2107162C1 |
| US 7695071 B2, 13.04.2010 | |||
| US 5999865 A1, 07.12.1999 | |||
| УСТРОЙСТВО ДЛЯ ШЕЛУШЕНИЯ ЗЕРНА | 1997 |
|
RU2174443C2 |
| WO 2010149852 A1, 29.12.2010. | |||

