1
Известно устройство для автоматического управления направленным двил ением горной машины, содержащее датчики усилия, взаимодействующие со стенками выработки, гидродомкраты распора, следящие золотники и элемент сравнения.
Недостатком известного устройства является низкая точность управления, связанная с тем, что контроль положения комбайна осуществляется только но углу крена.
В целях повышения точности управления в предлагаемом устройстве элемент сравнения выполнен в Виде двух пружинных трубок, механически соединенных с соответствующими золотниками и гидравлически с датчиками усилия.
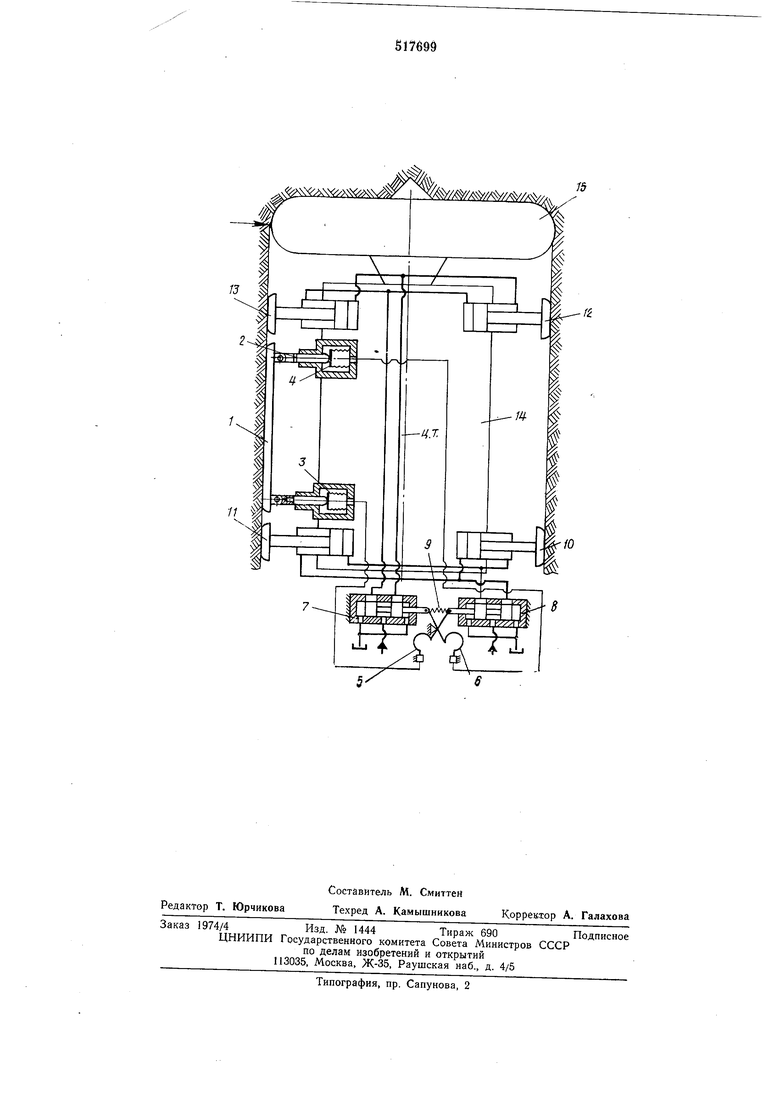
На чертеже приведена гидрокинематическая схема устройства.
Измерительная лыжа 1 через штоки 2 опирается на датчики усилия 3 и 4, связанные гидравлически соответственно с пружинными трубками 5 и б. Последние посредством рычагов шарнирно связаны со следящими золотниками 7 и 8, которые торцами опираются на пружину 9. Указанные элементы и распорные гидродомкраты заданного направления 10-13 закреплены на раме 14 комбайна, на которой установлен исполнительный орган 15. Полости датчиков- и пружинных трубок герметичны и заполнены рабочей жидкостью.
При работе комбайна направление проводимой им выработки определяется положением направляющих лыж гидродомкратов распора 10-13, которые находятся в контакте со
стенками выработки и скользят по ней в процессе рабочей подачи. Управление гидродомкратами осуществляется следящими золотниками 7 и 8. В положении, показанном на чертеже, направление прямых линий, проведенных через опорные поверхности лыж гидродомкратов н измерительной лыжи, совпадает с требуемым направлением выработки. Следящие золотники находятся в установившемся состоянии и удерживают опорные лыжи
гидродомкратов в положении, соответствующем заданному направлению выработки.
При возникновении неуравновещенной силы на исполнительном органе, направленной, например, по стрелке, показанной на чертеже,
уменьшается усилие на датчике 4. Вследствие уменьшения давления в полости датчика 4 пружинная трубка 6 «сжимается, перемещая следящий золотник 7 влево, что соответствует подаче рабочей жидкости в поршневую полость гидродомкрата 12. Последний создает противодействующую внешней силе реакцию, которая предотвращает отклонение исполнительного органа от заданного направления. Если усилие настолько велико, что возникает разворачивающий момент относительно
центра тяжести комбайна, то вместе с ослаблением усилия на датчике 4 увеличивается усилие на датчике 3. Это приводит, кроме указанното, вследствие «выправления пружинной трубки 5 к перемещению следящего золотника 8 влево (по чертежу), что соответствует подаче рабочей жидкости в поршневу1о полость гидродомкрата 11 и штоковую полость домкрата 10, т. е. создается реактивная сила, исключающая возможность разворота рамы комбайна.
Когда внешняя неуравновешенная сила на исполнительный оргап направлена против стрелки, показанной на чертел е, усилие па датчике 4 увеличивается, пружинная трубка 6 «разгибается и перемещает следящий золотник 7 вправо (по чертежу), что соответствует подаче рабочей жидкости в поршневую полость домкрата 13 и штоковую полость домкрата 12.
При параллельном смещении оси комбайна относительно заданного направления датчики 3 и 4 дают одинаковый сигнал - давление увеличивается (смещение влево по чертежу) или уменьшается (смещение вправо по чертежу). Первое приводит к тому, что пружинные трубки 5 и 6 «расправляются, перемещая следящие золотники 7 и 8 навстречу друг другу.
Это приводит к подаче жидкости в поршневые полости домкратов 11, 13 и соединению со сливом штоковых полостей домкратов 10, 12. Во втором случае пружинные трубки, «сжимаясь, производят перемещение следящих золотников навстречу друг другу против усилия, развиваемого установленной между пими пружиной 9. При этом рабочая жидкость подается в поршневые полости домкратов 10, 12
и осуществляется соединение со сливом штоковых полостей домкратов 11, 13. В результате продольная ось комбайна смещается параллельно себе самой до совпадения с продольной осью проводимой выработки.
Формула изобретения
Устройство для автоматического управления направленным движением горной машины, содержащее датчики усилия, взаимодействующие со стенками выработки, гидродомкраты распора, следящие золотники и элемент-сравнения, отличающееся тем, что, с целью повышения точности управления, элемент
сравнения выполнен в виде двух пружинных трубок, механически соединенных с соответствующими золотниками и гидравлически с датчиками усилия.
13
2
ff
/; f
/5
4V/Xi$ /AVAV/iy/A
§: «
;Г I
I
Ф I
I
1 I
I 1
Г
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОХОДЧЕСКИЙ КОМБАЙН | 1968 |
|
SU212929A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДОЛИНСКОГО МКД, СИСТЕМА УПРАВЛЕНИЯ КРЕПЬЮ, МЕЖСЕКЦИОННАЯ ЗАТЯЖКА КРЕПИ, ГИДРОСИСТЕМА КРЕПИ | 1999 |
|
RU2181842C2 |
| Гидравлический привод для ударногоСТРугА | 1979 |
|
SU815289A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГОРИЫМ КОМБАЙНОМ | 1973 |
|
SU394544A1 |
| Устройство для управления стреловидным исполнительным органом проходческого комбайна | 1988 |
|
SU1602987A1 |
| Конвейероструг для выемки мощных крутопадающих пластов | 1972 |
|
SU583298A1 |
| Проходческо-добычный комбайн | 1985 |
|
SU1288293A1 |
| Проходческий комбайн | 1988 |
|
SU1666696A1 |
| Гидросистема механизированной распорно-шагающей крепи | 1974 |
|
SU615230A1 |
| Устройство для управления очистным комбайном в вертикальной плоскости | 1980 |
|
SU935614A1 |