Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и устройству контроля над работой механизированной секции крепи, в частности, комбинированной горной машины длинных очистных забоев.
Предпосылки создания изобретения
Комбинированные горные машины длинных очистных забоев используются при подземной добыче угля. Такие комбинированные машины предназначены для добычи угля путем подрезания слоев породы вдоль широкого угольного забоя, имеющего ширину до 400 м. В этом случае уголь вдоль угольного забоя удаляется слоями в ходе последовательного перемещения комбинированной горной машины длинных очистных забоев под землей, в то время как кровля и перекрывающий слой обрушиваются во время работы в пустоту, образованную за перемещающейся комбинированной горной машиной длинных очистных забоев.
Для удержания обрушивающейся породы тем самым поддержания безопасного рабочего пространства вдоль и перед угольным забоем, такие комбинированные горные машины длинных очистных забоев обычно содержат множество механизированных секций крепи, расположенных в длинную линию бок о бок перед угольным забоем. Секции крепи, которые также называются щитами, выполняются таким образом, чтобы выборочно поддерживать кровлю, перекрывающую комбинированную горную машину длинных очистных забоев. Кроме того, секции крепи обычно оснащаются шарнирным перекладом, приводимым в действие поступательно, через который они соединяются с лавным конвейером.
Лавный конвейер проходит вдоль угольного забоя и несет режущий механизм с вращающимися режущими барабанами для срезания угля в угольном забое. Режущий механизм удерживается на лавном конвейере, поступательно перемещая режущие барабаны вперед и назад вдоль угольного забоя, тем самым удаляя и измельчая уголь, который загружается на лавный конвейер. Затем лавный конвейер транспортирует добытый уголь к боковине комбинированной горной машины длинных очистных забоев, где он далее перегружается на сеть конвейерных лент для транспортировки на поверхность.
Далее описывается работа такой комбинированной горной машины длинных очистных забоев. Сначала комбинированная горная машина длинных очистных забоев размещается перед угольным забоем для добычи угля из угольного забоя с помощью режущего механизма. Для этого режущий механизм приводится в действие и поступательно перемещается по всей ширине лавного конвейера, чтобы разрушать и удалять весь слой угля из угольного забоя. Во время работы режущего механизма механизированные секции крепи работают в режиме зацепления, в ходе которого они поддерживают или укрепляют кровлю над комбинированной горной машиной длинных очистных забоев.
Затем после удаления слоя угля лавный конвейер вместе с режущим механизмом перемещается к угольному забою, чтобы снова привести режущие барабаны режущего механизма в зацепление с угольным забоем. Это осуществляется с помощью механизированных секций крепи. В частности, в режиме зацепления секций крепи, шарнирные переклады приводятся в действие таким образом, что они выступают вперед и, таким образом, толкают лавный конвейер вместе с режущим механизмом в сторону угольного забоя.
После этого секции крепи по отдельности и последовательно перемещаются, приближаясь к лавному конвейеру. Для этого отдельные перемещаемые секции крепи пускаются, чтобы больше не оказывать поддерживающего усилия на кровлю. В этом пущенном состоянии секция крепи затем толкается в сторону смещенного лавного конвейера в результате втягивания шарнирного переклада. Таким образом, отдельные секции крепи перемещаются вслед за лавным конвейером. Это выполняется последовательно для каждой секции крепи.
В результате многократного и последовательного толкания лавного конвейера и последующего вытягивания секций крепи вслед за движением лавного конвейера, комбинированная горная машина длинных очистных забоев получает возможность продвигаться в направлении подачи.
Обычно шарнирные переклады секций крепи крепятся к лавному конвейеру срезными штифтами. Срезные штифты выполняются таким образом, чтобы разъединять соединение между шарнирными перекладами и лавным конвейером, когда механическое усилие, действующее на срезной штифт, превышает заранее заданное значение. Таким образом, срезные штифты защищают соединения и компоненты комбинированной горной машины длинных очистных забоев от чрезмерных усилий.
Однако если соединение между отдельной секцией крепи и лавным конвейером разорвано, то секция крепи больше не сможет перемещаться или проталкиваться в направлении движения комбинированной горной машины длинных очистных забоев, чтобы следовать за лавным конвейером. Соответственно, секция крепи будет оставаться позади, поскольку другие секции крепи продвигаются вместе с лавным конвейером. Это может привести к серьезной неисправности комбинированной горной машины длинных очистных забоев. Например, в этом случае гидравлические соединения, расположенные вдоль и между секциями крепи, могут быть разорваны. Кроме того, оставленные позади секции крепи могут повреждаться обрушившейся кровлей в пустоте за комбинированной горной машиной длинных очистных забоев.
Краткое изложение существа изобретения
Таким образом, задача состоит в создании надежного способа и устройства контроля для обнаружения неисправности механизированной секции крепи, в частности комбинированной горной машины длинных очистных забоев. Кроме того, задача состоит в создании механизированной секции крепи для использования в комбинированной горной машине длинных очистных забоев, которая оборудована таким устройством контроля.
Это решается с помощью способа, устройства контроля и механизированной секции крепи для использования в комбинированной горной машине длинных очистных забоев в соответствии с независимыми пунктами формулы изобретения. Предпочтительные варианты осуществления изложены в настоящем раскрытии, на рисунках, а также в зависимых пунктах формулы изобретения.
Соответственно, предлагается способ контроля над работой механизированной секцией крепи, в частности комбинированной горной машины длинных очистных забоев. Механизированная секция крепи, подлежащая контролю, содержит щит, соединенный с устройством удаления породы исполнительным механизмом для регулировки расстояния между щитом и устройством удаления породы. Способ включает этапы определения изменения положения щита во время срабатывания исполнительного механизма и этап обнаружения неисправности механизированной секции крепи исходя определенного изменения положения.
Кроме того, предлагается устройство контроля над работой механизированной секции крепи. Механизированная секция крепи содержит щит, соединенный с устройством удаления породы исполнительным механизмом для регулировки расстояния между щитом и устройством удаления породы. В частности, устройство контроля содержит сенсорный модуль для определения изменения положения щита во время срабатывания исполнительного механизма и устройство обнаружения неисправности механизированной секции крепи исходя определенного изменения положения.
С этой целью предлагается механизированная секция крепи для комбинированной горной машины длинных очистных забоев, которая оборудована вышеописанным устройством контроля.
Краткое описание рисунков
Настоящее изобретение будет более понятно со ссылкой на следующее подробное описание различных вариантов осуществления изобретения, а также на приведенные рисунки.
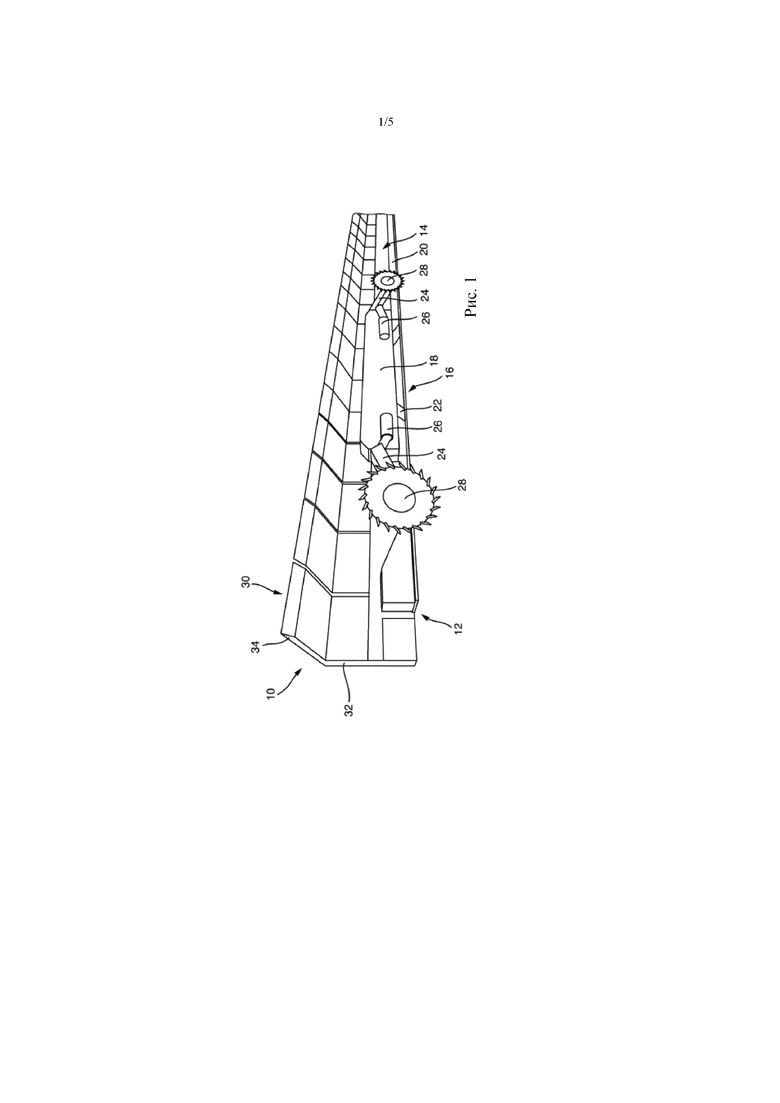
На рис. 1 представлено схематическое изображение комбинированной горной машины длинных забоев, содержащей множество механизированных секций крепи.
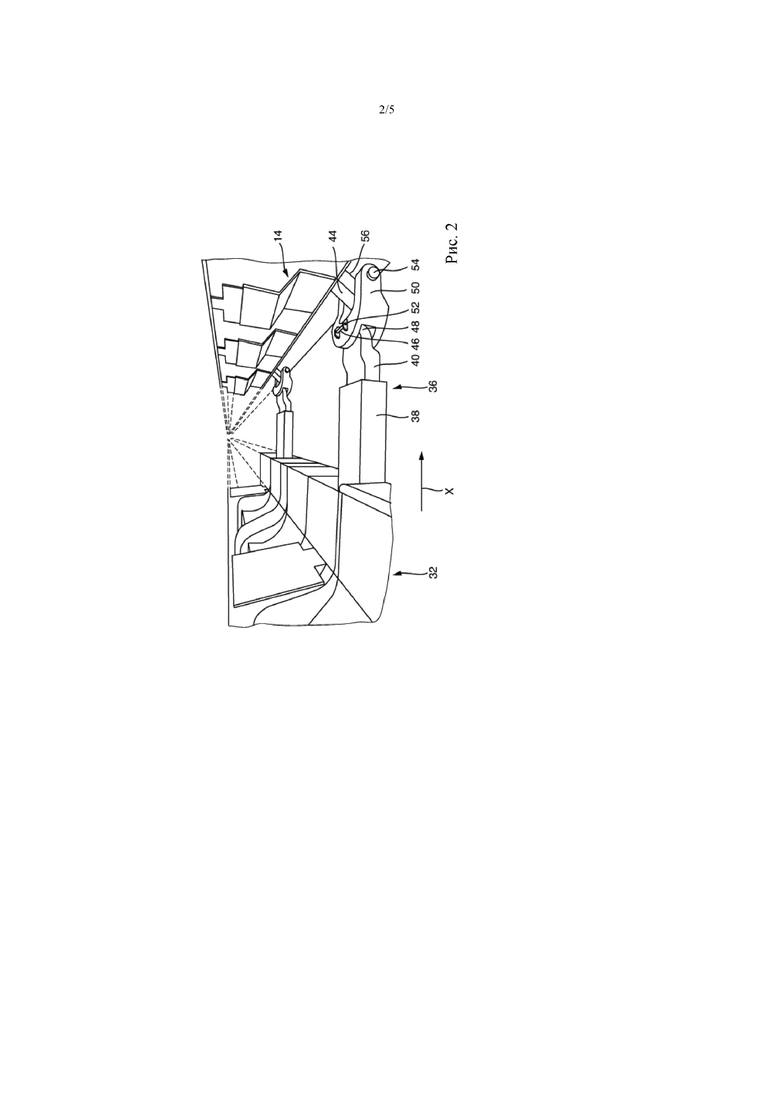
На рис. 2 представлено схематическое изображение соединения между механизированными секциями крепи и устройством удаления породы комбинированной горной машины длинных очистных забоев, изображенной на рис. 1.
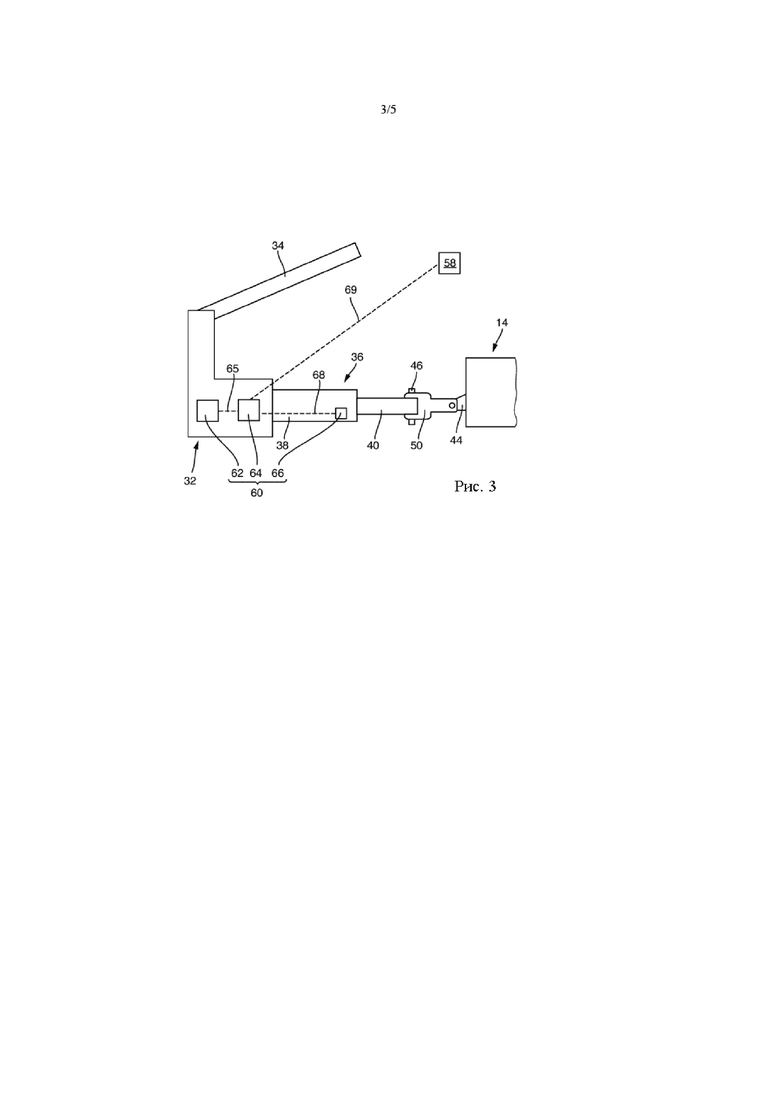
На рис. 3 представлено схематическое изображение сбоку механизированной секции крепи, изображенной на рис. 1 и 2, которая оборудована устройством контроля над работой механизированной секции крепи.
На рис. 4 представлена блок-схема, иллюстрирующая способ, выполняемый устройством контроля, изображенным на рис. 3, в ходе работы механизированной секции крепи.
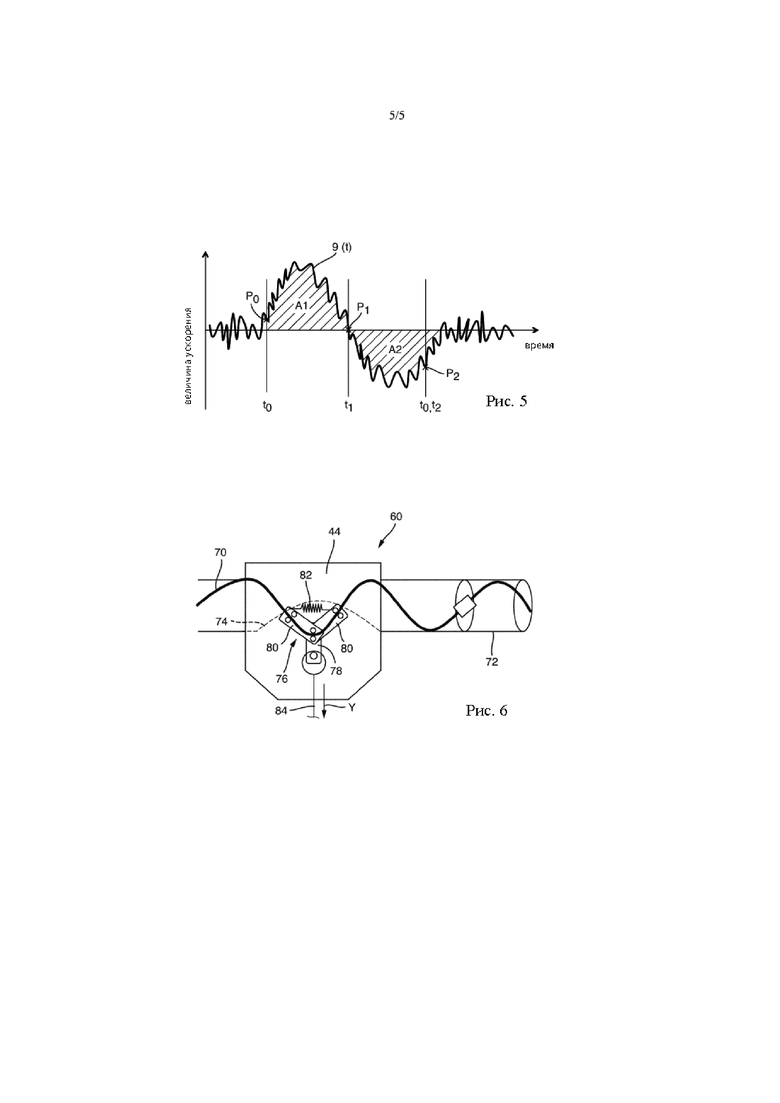
На рис. 5 представлена схема, иллюстрирующая измеренный сигнал, полученный сенсорным модулем устройства контроля, изображенным на рис. 3.
На рис. 6 представлен вид снизу соединения между механизированной секцией крепи и устройством удаления породы, который оборудован устройством контроля согласно другому варианту осуществления.
Подробное описание предпочтительных вариантов осуществления изобретения
Далее раскрытие изобретения будет более подробным со ссылкой на прилагаемые рисунки. На рисунках одинаковые элементы обозначены одинаковыми позициями, и их повторное описание может быть опущено, чтобы избежать избыточности.
На рис. 1 представлена комбинированная горная машина длинных очистных забоев 10, предназначенная для проведения подземных горных работ, то есть разработки длинными забоями. В частности, представленная комбинированная горная машина длинных очистных забоев 10 может использоваться для добычи угля, но не ограничивается этим применением. Скорее, горная машина длинных очистных забоев 10 может использоваться для добычи, например, подземной добычи других полезных ископаемых.
Комбинированная горная машина длинных очистных забоев 10 содержит устройство 12 удаления породы, размещаемое перед угольным забоем, который будет разрабатываться горной машиной длинных очистных забоев 10. В частности, устройство 12 удаления породы, содержит лавный конвейер 14, выполненный в виде длинной линии передачи и размещаемый по всей ширине угольного забоя. Устройство 12 удаления породы дополнительно содержит режущий механизм 16, который поступательно удерживается на лавном конвейере 14.
Режущий механизм 16 содержит каретку 18 или основной корпус, соединенный с рельсовой системой 20 лавного конвейера 14 посредством тягового узла 22, выполненного для перемещения режущего механизма 16 по рельсовой системе 20. Благодаря такой схеме компоновки режущий механизм 16 способен перемещаться вдоль лавного конвейера 14 и, таким образом, вдоль угольного забоя.
На противоположных концах каретки 18 режущий механизм 16 снабжен поворотными редукторами 24, которые способны осуществлять перемещение вверх и вниз с помощью гидравлических толкателей 26. Каждый из поворотных редукторов 24 несет барабан 28 режущего механизма, периферийная поверхность которого снабжена множеством резцов. Барабаны 28 режущего механизма приводятся во вращение и способны добывать и измельчать уголь при подаче вдоль угольного забоя.
Лавный конвейер 14 выполняется для приема угля, добытого в угольном забое во время работы режущего механизма 16, и для транспортировки добытого угля к боковине комбинированной горной машины длинных очистных забоев 10, где он далее перегружается на сеть конвейерных лент для транспортировки на поверхность.
Комбинированная горная машина длинных очистных забоев 10 содержит множество механизированных секций крепи 30, которые расположены в длинную линию бок о бок позади и вдоль лавного конвейера 14. В этом контексте термин «позади» относится к движению или направлению подачи комбинированной горной машины длинных очистных забоев 10.
Каждая механизированная секция крепи 30 содержит щит 32, также называемый секцией крепи, крепью или домкратной стойкой. Щит 32 выполнен для выборочной поддержки кровли, перекрывающей комбинированную горную машину длинных очистных забоев 10 при эксплуатации под землей. Для этого щит 32 содержит экран 34 с гидравлическим приводом, который может перемещаться вверх и вниз.
Щит 32 выполняется способным работать в режиме зацепления, в котором экран 34 поддерживает кровлю, перекрывающую щит 32. В режиме зацепления экран 34 перемещается вверх. Кроме того, щит 32 может функционировать в режиме разблокировки, в котором экран 34 перемещается вниз, по сравнению с режимом зацепления.
Как следует из рис. 2, каждый щит 32 соединен с устройством 12 удаления породы посредством исполнительного механизма 36. Каждый исполнительный механизм 36 выполнен для регулирования расстояния между соответствующим щитом 32 и устройством 12 удаления породы.
В частности, исполнительный механизм 36 представляет собой линейный исполнительный механизм, в частности телескопический исполнительный механизм, содержащий цилиндр 38 и поршень 40, также называемый шарнирным перекладом или плунжером. Исполнительный механизм 36 выполнен таким образом, что при его приведении в действие поршень 40 перемещается, т.е. втягивается или выдвигается вперед относительно цилиндра 38 вдоль направления X подачи комбинированной горной машины длинных очистных забоев 10.
В показанной схеме компоновки каждый исполнительный механизм 36 располагается таким образом, чтобы цилиндр 38 напрямую крепился к основному корпусу соответствующего щита 32, а поршень 40 напрямую крепился к лавному конвейеру 14. В альтернативном варианте осуществления, исполнительный механизм 36 располагается таким образом, чтобы цилиндр 40 напрямую крепился к основному корпусу щита 32, а цилиндр 38 напрямую крепился к лавному конвейеру 14. Каждый исполнительный механизм 36 соединяется с отдельными секциями лавного конвейера 14. Эти секции также называются рештаками 44.
Поршень 40 каждого исполнительного механизма 36 прикрепляется к соответствующему рештаку 44 лавного конвейера 14 с помощью срезного штифта 46. В частности, каждый рештак 44 лавного конвейера 14 снабжается вильчатым шарниром 50, к которому с помощью срезного штифта 46 прикрепляется рабочая часть 48 поршня 40. Как следует из рис. 2, каждый вильчатый шарнир 50 содержит выемку для вмещения рабочей части 48 соответствующего поршня 40, при этом срезной штифт 46 проходит в вертикальном направлении как через вильчатый шарнир 50, так и через рабочую часть 48 поршня 40. Для фиксации срезных штифтов 46 в положении зацепления с вильчатым шарниром 50 и поршнем 40 предусмотрены предохранительные стопоры 52.
Срезные штифты 46 выполняются способными разрушаться и таким образом разъединять соединение между исполнительным механизмом 36 и устройством 12 удаления породы, когда механическое усилие, действующее на срезной штифт 46, превышает заранее заданное значение. Таким образом, срезные штифты 46 обладают заранее заданным разрушающим механическим усилием для защиты механизированных секций крепи 30 и устройства 12 удаления породы от чрезмерных нагрузок, которые могут вызвать серьезное повреждение комбинированной горной машины длинных очистных забоев.
Вильчатые шарниры 50 соединены с соответствующими рештаками 44 лавного конвейера 14 с помощью болтового соединения, обеспечивающего вертикальное перемещение вильчатого шарнира 50 относительно рештака 44. Болтовое соединение содержит болт 54, прочно прикрепленный к вильчатому шарниру 50, который входит в прорезь 56, выполненную в рештаке 44. Благодаря такой схеме компоновки, соединение между исполнительным механизмом 36 и устройством 12 удаления породы обеспечивает вращательное движение вокруг оси, перпендикулярно направлению подачи X.
Кроме того, как показано на рис. 3, комбинированная горная машина длинных очистных забоев 10 содержит центральный блок 58 управления работой отдельными механизированными секциями крепи 30. В частности, центральный блок 58 управления выполняется способным выборочно приводить в действие щиты 32 и исполнительные механизмы 36 множества механизированных секций крепи 30, чтобы управлять поступательным движением комбинированной горной машины длинных очистных забоев 10 вдоль направления подачи X. Для этого центральный блок управления 58 выполняется способным выборочно управлять режимом втягивания исполнительных механизмов 36, когда поршень втягивается в цилиндр 38, и режимом выдвижения, когда поршень 38 выдвигается из цилиндра 38. Кроме того, центральный блок 58 управления выполняется способным выборочно управлять щитами 32 в режиме зацепления, в котором соответствующие экраны 34 перемещаются вверх, чтобы входить в зацепление и удерживать кровлю, покрывающую соответствующие механизированные секции крепи 30, и в режиме разблокировки, в котором соответствующие экраны 34 перемещаются вниз. Соответственно, в режиме разблокировки щиты 32 не входят в зацепление и, таким образом, не поддерживают кровлю, перекрывающую соответствующие механизированные секции крепи 30.
Таким образом, центральный блок 58 управления может управлять поступательным движением комбинированной горной машины длинных очистных забоев 10. В частности, для перемещения вперед устройства 12 удаления породы, т.е. в направлении угольного забоя, центральный блок 58 управления сначала переводит щиты 32 множества механизированных секций крепи 30 в режим зацепления таким образом, что экраны 34 занимают положение зацепления, в котором они входят в зацепление и, таким образом, поддерживают кровлю, перекрывая комбинированную горную машину длинных очистных забоев 10. Затем исполнительные механизмы 36 множества механизированных секций крепи 30 переходят в режим выдвижения и толкают устройство 12 удаления породы в направлении подачи X комбинированной горной машины длинных очистных забоев 10. После этого центральный блок 58 управления последовательно перемещает отдельные механизированные секции крепи 30 вслед за перемещением устройства 12 удаления породы. Для этого центральный блок 58 управления сначала приводит в действие щит 32 отдельной механизированной секции крепи 30 в режим разблокировки, тем самым перемещая его экран 34 вниз, чтобы тот больше не входил в зацепление с кровлей, перекрывающей механизированную секцию крепи 30. После этого исполнительный механизм 36 той же механизированной секции крепи 30 осуществляет режим втягивания, тем самым подтягивая щит 32 к смещенному устройству 12 удаления породы вслед за его перемещением. Такая операция перемещения успешно выполняется для каждой из множества механизированных секций крепи 30. Таким образом, движение подачи комбинированной горной машины длинных очистных забоев 10 выполняется последовательно.
Кроме того, для контроля над работой комбинированной горной машины длинных очистных забоев 10 каждая из множества механизированных секций крепи 30 оборудуется устройством 60 контроля. Устройство 60 контроля выполнено для осуществления контроля над работой соответствующей механизированной секции крепи 30, т.е. для обнаружения неисправности механизированной секции крепи 30. Другими словами, устройство 60 контроля выполнено для определения того, находится ли соответствующая механизированная секция крепи 30, т.е. ее соединение с устройством 12 удаления породы, в штатном состоянии или в состоянии отказа.
В контексте настоящего раскрытия термин «штатное состояние» относится к состоянию механизированной секции крепи 30, которое обеспечивает штатную работу комбинированной горной машины длинных очистных забоев 10. Соответственно, термин «неисправность» или «состояние отказа» относится к состоянию механизированной секции крепи 30, которое указывает, что штатная работа комбинированной горной машины длинных очистных забоев 10 не может быть обеспечена. Напротив, при дальнейшей эксплуатации комбинированной горной машины длинных очистных забоев 10, когда одна или несколько механизированных секций крепи 30 будут неисправны, то следует ожидать повреждения компонентов комбинированной горной машины длинных очистных забоев, т.е. механизированных секций крепи 30.
В показанной схеме компоновки каждая из множества механизированных секций крепи 30 оборудована устройством 60 контроля, соответственно. В альтернативном варианте осуществления общее устройство 60 контроля может использоваться для контроля работы множества механизированных секций крепи 30. При такой схеме компоновки, по меньшей мере, часть устройства 60 контроля может входить в состав центрального блока 58 управления.
На рис. 4 представлен способ контроля над работой механизированной секции крепи 30, который выполняется одним из вышеописанных устройств 60 контроля. Способ описан в качестве примера для одного из множества устройств 60 контроля и, соответственно, может применяться каждым из других устройств 60 контроля комбинированной горной машины длинных очистных забоев 10.
На первом этапе S1 способа изменение состояния щита 32 и исполнительного механизма 36 отслеживается во время срабатывания исполнительного механизма 36. Срабатывание исполнительного механизма, в общем, относится к приведению в действие исполнительного механизма 36 для уменьшения расстояния между соответствующим щитом 32 и устройством 12 удаления породы. Другими словами, срабатывание исполнительного механизма относится к работе исполнительного механизма 36 для выдвижения щита 32 в сторону устройства 12 удаления породы, т.е. для обеспечения возможности щиту 32 следовать за поступательным движением устройства 12 удаления породы, как описано выше. В показанной схеме компоновки срабатывание исполнительного механизма представляет собой операцию втягивания и, таким образом, соответствует работе исполнительного механизма 36 в режиме втягивания.
В частности, первый этап S1 содержит два подэтапа, которые могут выполняться одновременно или последовательно. На первом подэтапе S1.1 изменение Δp положения щита 32 определяется во время срабатывания исполнительного механизма 36. В частности, изменение Δp положения относится к параметру, который указывает на смещение, то есть длину смещения, на которую щит 32 смещается или сместился во время срабатывания исполнительного механизма 36. Другими словами, изменение Δp положения указывает на смещение, т.е. длину смещения, щита 32 относительно первоначального положения. Более конкретно, изменение Δp положения указывает на расстояние между конечным положением и первоначальным положением щита 32 во время срабатывания исполнительного механизма. В этом контексте термин «первоначальное положение» относится к положению щита 32 в начале срабатывания исполнительного механизма или до того, как исполнительный механизм 36 приведен в действие в ходе срабатывания. Термин «конечное положение» относится к положению щита 32 в конце или после срабатывания исполнительного механизма 36. Более конкретно, изменение положения указывает на изменение положения щита в направлении устройства 12 удаления породы, т.е. которое совпадает с направлением подачи X комбинированной горной машины длинных очистных забоев 10.
Для определения изменения Δp положения устройство 60 контроля содержит устройство 64 обнаружения, т.е. блок управления, который коммутирован с датчиком 62 изменения положения. Устройство 64 обнаружения выполнено для приема измерительных сигналов от датчика 62 изменения положения через первую сигнальную линию 65, на основании которых определяется изменение Δp положения. В альтернативной схеме компоновки устройство 64 обнаружения и датчик 62 изменения положения могут подключаться по беспроводной линии связи.
В показанной схеме компоновки датчик 62 изменения положения выполнен в виде датчика ускорения, также называемого акселерометром или датчиком движения. Датчик 62 изменения положения находится в щите 32 и выполнен для измерения ускорения, испытываемого щитом 32. В частности, датчик 62 изменения положения способен измерять ускорение, по меньшей мере, вдоль направления подачи X, т.е. от центра тяжести щита 32 к устройству 12 удаления породы. Соответственно, измеренный сигнал, генерируемый датчиком 62 изменения положения, указывает величину ускорения щита 32 вдоль направления подачи X.
На рис. 5 представлен график, на котором, в качестве примера, проиллюстрирован измерительный сигнал, генерируемый датчиком 62 изменения положения во время срабатывания исполнительного механизма. На графике величина ускорения показана как функция времени и представлена в виде кривой g(t). По оси абсцисс графика отображается величина ускорения в направлении подачи X, при этом положительная величина указывает ускорение щита 62 по направлению к устройству 12 удаления породы. По оси ординат графика отображается время, где t0 указывает на начало, а ta указывает на конец срабатывания исполнительного механизма. Соответственно, период времени от t0 до ta указывает на продолжительность срабатывания исполнительного механизма.
Сгенерированный таким образом измерительный сигнал принимается устройством 64 обнаружения через первую сигнальную линию 65 и обрабатывается, чтобы определить величину изменения Δp положения. В частности, устройство 64 обнаружения выполнено для получения или вычисления, по меньшей мере, одной площади Aj под кривой g(t) и для определения величины изменения Δp положения исходя из полученной площади Aj.
Более конкретно, устройство 64 обнаружения выполнено для того, чтобы сначала вычислить точки Pj перехода через нуль сигнала или кривой g(t) во время срабатывания исполнительного механизма, т.е. между t0 и ta, при котором измеренное ускорение равно нулю. Следует отметить, что точки сигнала на начало, т.е. в момент времени t0, и на конец, т.е. в момент времени ta, срабатывания исполнительного механизма также считаются точками Pj перехода через нуль. Затем устройство 64 обнаружения определяет абсолютное значение всех площадей Aj под кривой g(t). Это выполняется путем последовательного вычисления абсолютного значения интеграла измерительного сигнала между двумя последующими точками Pj перехода через нуль. Эти абсолютные значения затем суммируются для определения изменения Δp положения. Таким образом, величина изменения Δp положения, определенная устройством 64 обнаружения, может быть выражена следующим образом:
где j указывает общее количество точек перехода через нуль, определенных во время срабатывания исполнительного механизма, включая точки в момент времени t0 и ta; а tPi указывает время, то есть значение точки перехода через нуль Pi на оси абсцисс.
В другом варианте осуществления, устройство 64 обнаружения выполняется способным сравнивать часть измеренного сигнала, полученного во время срабатывания исполнительного механизма, с другой частью измеренного сигнала, полученной до или после срабатывания исполнительного механизма. На основе этого сравнения устройство 64 обнаружения определяет, был ли щит 32 штатно перемещен во время срабатывания исполнительного механизма, тем самым решая, находится ли механизированная секция крепи 30 в штатном состоянии или в состояния отказа.
В другом варианте осуществления, устройство 64 обнаружения может выполняться таким образом, чтобы дополнительно учитывать, по меньшей мере, еще один дополнительный измеренный сигнал, полученный от дополнительных датчиков изменения положения, т.е. датчиков ускорения, соединенных, по меньшей мере, с еще одной дополнительной механизированной секцией крепи, расположенной рядом с механизированной секцией крепи 30, содержащей устройство 64 обнаружения. Исходя из этого, измеренный сигнал, полученный датчиком 62 изменения положения, подвергается подавлению шума. Таким образом, выделяется часть измеренного сигнала, связанная с перемещением или ускорением щита 32, вызванным срабатыванием исполнительного механизма 36.
Как изложено выше, показанное устройство 60 контроля использует датчик ускорения. Данное устройство измеряет штатное ускорение щита 32 экрана. Другими словами, датчик ускорения измеряет ускорение щита 32 относительно самого себя, т.е. относительно первоначального положения.
Однако функции устройства 60 контроля этим не ограничиваются. Напротив, в качестве датчика 62 изменения положения может использоваться любой сенсорный модуль, который подходит для измерения или определения параметра, указывающего на изменение положения щита 32.
Например, в другом варианте осуществления изобретения, датчик 62 изменения положения может выполняться для определения изменения положения относительно, по меньшей мере, устройства 12 удаления породы дополнительной механизированной секцией крепи, соединенной с соседней механизированной секцией крепи 30, оснащенной устройством 60 контроля, и относительно окружающей механизированную секцию крепи (30) породой.
Это реализуется с помощью сенсорного модуля, который определяет расстояние между двумя точками, т.е. точки отправки и точки приема, на основе измерений времени выполнения или времени прохождения сигнала, передаваемого между двумя точками. Другими словами, такой сенсорный модуль определяет расстояние между двумя точками. Например, такой сенсорный модуль может выполняться для определения или измерения времени, необходимого для передачи сигнала от передатчика до приемника. Это время также называют односторонней задержкой. Кроме того, сенсорный модуль может выполняться таким образом, чтобы определять время, необходимое для передачи сигнала от передатчика до приемника и обратно от приемника до передатчика. Это время также называется сквозной задержкой. Щит 32 может оснащаться передатчиком а, по меньшей мере, устройство 12 удаления породы, дополнительная механизированная секция крепи, соединенная с примыкающей механизированной секцией крепи 30, оснащаться устройством 60 контроля, а окружающая механизированную секцию крепи 30 порода может оснащаться приемником, или наоборот.
Для обнаружения перемещения сенсорный модуль может использовать электромагнитный сигнал. Например, сенсорный модуль может представлять собой оптический датчик, который излучает свет, напр. лазерный луч и обнаруживает отраженный свет. В другом варианте осуществления, сенсорный модуль может использовать радиоволны в качестве сигнала, который должен быть передан и обнаружен. Соответственно, сенсорный модуль может представлять собой беспроводное сенсорное устройство, например, сенсорное устройство Wi-Fi или Bluetooth.
Кроме того, сенсорный модуль может выполняться в виде одометра, который определяет изменение положения щита 32 относительно окружающих механизмов, в частности, породы, на которой находится механизированная секция крепи 30. Например, щит 32 может оснащаться, по меньшей мере, одним колесом для измерения длины перемещения, расположенным в его нижней части, которое приводится в действие при перемещении щита 32. Одометр измеряет перемещение колеса для измерения длины перемещения и определяет изменение положения щита 32.
Этап S1 дополнительно содержит второй подэтап S1.2 определения изменения хода исполнительного механизма 36 во время срабатывания исполнительного механизма. В частности, изменение Δs хода относится к параметру, который представляет собой длину изменения хода, на которую сместился или смещался поршень 40 исполнительного механизма 36 во время срабатывания исполнительного механизма. Другими словами, изменение Δs хода указывает на смещение, т.е. длину смещения, поршня 40 относительно его первоначального положения. Соответственно, изменение Δs хода указывает на смещение между конечным положением и первоначальным положением поршня 40 во время срабатывания исполнительного механизма. В этом контексте термин «первоначальное положение» относится к положению поршня 40 в начале или перед срабатыванием исполнительного механизма, а термин «конечное положение» относится к положению поршня 40 в конце или после срабатывания исполнительного механизма.
Для определения изменения Δs хода устройство 60 контроля оснащается датчиком 66 перемещения, выполненным для определения изменения хода. Датчик 66 перемещения, например, может представлять собой датчик с язычковым контактом или любой другой подходящий датчик, способный определять ход или изменение Δs хода исполнительного механизма 36, т.е. его поршня 40. Как следует из рис. 3, датчик 66 перемещения устанавливается в исполнительном механизме 36, т.е. в цилиндре 38 исполнительного механизма. Датчик 66 перемещения соединен с устройством 64 обнаружения посредством второй сигнальной линии 68, по которой он передает определенное изменение Δs хода в устройство 64 обнаружения. Кроме того, датчик 66 перемещения способен передавать определенное изменение Δs хода по линии беспроводной связи в устройство 64 обнаружения.
На втором этапе S2 способа отслеживается работа механизированной секции крепи 30. Этот этап выполняется с помощью устройства 64 обнаружения на основе определенного изменения Δp положения, полученного на подэтапе S1.1, и на основе определенного изменения Δs хода, полученного на подэтапе S1.2. Более конкретно, на втором этапе S2 устройство 64 обнаружения устройства 60 контроля определяет, на основе определенного положения и изменения хода, неисправна ли механизированная секция крепи 30, т.е. ее соединение с устройством 12 удаления породы. Другими словами, устройство 64 контроля определяет, находится ли соответствующая механизированная секция крепи 30, т.е. ее соединение с устройством 12 удаления породы, в состоянии отказа или в штатном состоянии.
В общем, устройство 64 обнаружения выполняется для обнаружения неисправности или состояния отказа механизированной секции крепи 30, когда определенное изменение положения не указывает на штатное изменение положения щита во время срабатывания исполнительного механизма. Кроме того, устройство 64 обнаружения выполняется для обнаружения штатного состояния механизированной секции крепи 30, когда определенное изменение положения указывает штатное изменение положения щита.
Устройство 64 обнаружения выполняется для сравнения определенного изменения положения с пороговым значением для определения того, указывает ли определенное изменение Δp положения на штатное или достаточно точное изменение положения щита. Например, устройство 64 обнаружения способно обнаруживать состояние отказа, когда определенное изменение Δp положения не превышает пороговое значение, и обнаруживать штатное состояние, когда определенное изменение Δp положения равно или превышает пороговое значение.
С этой целью, устройство 64 обнаружения выполняется для определения того, взаимосвязано ли определенное изменение положения и определенное изменение хода, и для определения того, указывает ли определенное изменение Δp положения на штатное или достаточно точное изменение положения щита. Другими словами, для определения штатного изменения положения щита устройство 64 обнаружения дополнительно принимает во внимание определенное изменение хода. В частности, устройство 64 обнаружения выполняется для определения штатного состояния механизированной секции крепи 30, когда определенное изменение Δp положения и определенное изменение Δs хода взаимосвязаны, и для определения состояния отказа, когда определенное изменение Δp положения и определенное изменение Δs хода не взаимосвязаны.
Более конкретно, для принятия решения о том, взаимосвязано ли определенное изменение Δp положения с определенным изменением Δs хода, устройство 64 обнаружения выполняется для сравнения каждого из определенных значений с соответствующим пороговым значением, как изображено подэтапами S.2.1 и S2.3 на рис. 4.
На первом подэтапе 2.1 устройство 64 обнаружения сравнивает абсолютное значение определенного изменения Δs хода с первым пороговым значением T1. Если абсолютное значение определенного изменения Δs хода равно или превышает первое пороговое значение T1, то устройство 64 обнаружения переходит ко второму подэтапу S2.2, как изображено на рис. 4. Однако, если абсолютное значение определенного изменения хода ниже, чем первое пороговое значение T1, то устройство 64 обнаружения переходит к третьему этапу S3 способа, на котором устройство 64 обнаружения подает сигнал состояния отказа, который передается в центральный блок 58 управления, т.е. по третьей сигнальной линии 69 или по линии беспроводной связи. Сигнал состояния отказа сообщает центральному блоку 58 управления, что рассматриваемая механизированная секция крепи 30 неисправна.
На втором подэтапе S2.2 устройство 64 обнаружения вычисляет второе пороговое значение T2 исходя из определенного изменения Δs хода. После этого, на третьем подэтапе S2.3, устройство 64 обнаружения сравнивает определенное изменение Δp положения со вторым пороговым значением T2. Если устройство 64 обнаружения определяет, что абсолютное значение определенного изменения Δp положения ниже, чем второе пороговое значение T2, то устройство 64 обнаружения переходит к третьему этапу S3 и передает сигнал состояния отказа в центральный блок 58 управления. Однако, если устройство 64 обнаружения на подэтапе S2.3 определяет, что абсолютное значение определенного изменения Δp положения равно или больше второго порогового значения T2, то устройство 64 обнаружения переходит к четвертому этапу S4, на котором устройство 64 обнаружения подает сигнал о штатном состоянии, который передается в центральный блок 58 управления, т.е. по третьей сигнальной линии 69 или по линии беспроводной связи. Сигнал штатного состояния сообщает центральному блоку 58 управления, что рассматриваемая механизированная секция крепи 30 находится в штатном состоянии.
На рис. 6 представлена другая схема компоновки устройства 60 контроля. В соответствии с этой схемой компоновки, устройство 60 контроля представлено в виде пассивного устройства контроля, установленного во множестве рештаков 44 лавного конвейера 14, как показано на рис. 6. В частности, устройство 60 контроля использует технологию рефлектометрии промежутков времени (TDR). В общем, технология TDR включает в себя передачу импульса энергии через носитель и измерение изменений в отражениях и характеристиках носителя. Таким образом, изменения или неисправности в линиях передачи, т.е. в носителе, обнаруживаются и локализуются. Кроме того, устройство 60 контроля способно использовать варианты технологии TDR, в частности рефлектометрию в частотной области или методы передачи сигналов с расширенным спектром.
В частности, устройство 60 контроля содержит носитель 70, который прикреплен к лавному конвейеру 14 таким образом, чтобы проходить вдоль множества рештаков 44, т.е. вдоль става рештаков. В схеме компоновки, показанной на рис. 6, носитель 70 представляет собой оптико-волоконный кабель, прикрепленный к множеству рештаков 44 на их нижней стороне. Для защиты носителя 70 предусмотрен шланг 72 для приема и размещения носителя 70. Внутри шланга 72 носитель 70 свободно закручен по спирали.
На каждом рештаке 44 шланг 72 снабжен выемкой или вырезом 74 для доступа к носителю 70. К открытому участку носителя 70 прикреплено механическое звено 76, которое выполнено для управления характеристикой передачи сигнала носителем 70 исходя из механического усилия, действующего на фиксатор 78 натяжного шнура.
В показанной схеме компоновки механическое звено 76 содержит двуплечный рычаг 80, плечи которого способны вращаться, и скреплены друг с другом на первом конце. К первому концу плеч 80 рычага прикреплен фиксатор 78 натяжного шнура. Механическое звено 76 выполнено таким образом, что при вытягивании фиксатора 78 натяжного шнура в направлении Y от плеч 80 рычага, вторые концы плеч 80 рычага, которые расположены напротив первого конца, сближаются друг с другом. Кроме того, между вторыми концами плеч 80 рычага расположен пружинный элемент 82, который стягивает вторые концы друг с другом.
Носитель 70 прикреплен к механическому звену 76 таким образом, что носитель 70 последовательно прикрепляется ко второму концу первого из двух плеч 80 рычага, к первому концу того же плеча 80 рычага и ко второму концу другого из двух плеч 80 рычага, как показано на рис. 6. Посредством такой схемы компоновки, радиус изгиба носителя 70 и, следовательно, характеристика передачи сигнала могут изменяться при приведении в действие механического звена 76, то есть фиксатора 78 натяжного шнура. Соответственно, когда к фиксатору 78 натяжного шнура не прилагается тянущее усилие, то на носителе 70 образуется максимальный радиус изгиба, который ухудшает характеристику передачи сигнала от носителя 70.
Фиксатор 78 натяжного шнура механического звена 76 соединен с цилиндром 38 исполнительного механизма 36 с помощью троса 84, изготовленного из стали. Трос 84 проходит по нижней стороне исполнительного механизма 36 для защиты от падающей породы. Соединение между тросом 84 и фиксатором 78 натяжного шнура выполняется таким образом, что при разъединении соединения между исполнительным механизмом 36, т.е. его поршнем 40 и лавным конвейером 14, т.е. его рештаком 44, происходит разъединение соединения между тросом 84 и фиксатором 78 натяжного шнура. Таким образом, после разъединения соединения между исполнительным механизмом 36 и лавным конвейером 14 образуется максимальный радиус изгиба носителя 70, что ухудшает характеристику передачи сигнала.
Устройство 60 контроля дополнительно содержит сенсорный модуль (не показан) для определения характеристики передачи сигнала носителем и, таким образом, для определения изменения положения щита 32 во время срабатывания исполнительного механизма 36. В частности, сенсорный модуль представляет собой головку датчика TDR, прикрепленную к одному концу носителя 70 на торце става рештаков. Сенсорный модуль содержит генератор импульсов для генерации импульса энергии, который передается по носителю 70. Кроме того, сенсорный модуль содержит датчик для измерения отражений импульса энергии, на основании которого определяются характеристики передачи сигнала по носителю 70. Эти измеренные отражения указывают на изменение положения щитов 32.
Измеренные отражения передаются в устройство обнаружения (не показано) устройства 60 контроля, которое выполнено для определения, исходя из измеренных отражений, имеет ли носитель 70 плохие характеристики передачи сигнала и в каком положении, и на какой длине эти характеристики имеют место у носителя 70. Таким образом, блок обнаружения выполнен для определения, на каком рештаке 44 лавного конвейера 14 высвобождается механическое звено 76, тем самым указывая, какая механизированная секция крепи 30 отсоединена от лавного конвейера 14 и, таким образом неисправна. Сенсорный модуль выполнен для непрерывного анализа линейной характеристики носителя 70 от головки датчика до линейного оконечного устройства.
Устройство 60 контроля, использующее технологию TDR, рассматривается как пассивное устройство контроля, поскольку в ставе рештаков не требуются устройства накопления энергии или активные компоненты. Вся электроника размещается в электрическом отсеке, расположенном на торце става рештаков.
В другом варианте осуществления, носитель 70 может выполняться в виде электрического кабеля, напр. медного кабеля. Соответственно, механическое звено 76 может выполняться в виде электрического переключателя, который в отключенном состоянии прерывает электрическое соединение носителя 70.
Для специалиста в данной области техники очевидно, что эти варианты осуществления и элементы только изображают примеры множества возможностей. Следовательно, показанные здесь варианты осуществления не ограничивают эти функции и схемы компоновки. Любая возможная комбинация и конфигурация описанных функций входит в объем изобретения.
Предлагается способ контроля над работой механизированной секции крепи, в частности комбинированной горной машины длинных очистных забоев. Механизированная секция крепи, подлежащая контролю, может содержать щит, соединенный с устройством удаления породы исполнительным механизмом для регулировки расстояния между щитом и устройством удаления породы. Способ может включать этапы определения изменения положения щита во время срабатывания исполнительного механизма и этап обнаружения неисправности механизированной секции крепи исходя определенного изменения положения.
Обычно в такой механизированной секции крепи исполнительный механизм соединяется, по меньшей мере, со щитом или устройством удаления породы с помощью срезного штифта. Срезные штифты могут выполняться таким образом, чтобы разъединять соединение между механизированной секцией крепи и лавным конвейером, когда механическое усилие, действующее на срезной штифт, превышает заранее заданное значение. Таким образом, срезной штифт обладает заранее заданным разрушающим механическим усилием для защиты механизированной секции крепи от чрезмерных нагрузок, которые могут вызвать серьезное повреждение.
Неисправность механизированной секции крепи может быть вызвана сломанным срезным штифтом. В предлагаемом способе неисправность или состояние отказа механизированной секции крепи обнаруживают на основании определенного изменения положения во время срабатывания исполнительного механизма. Таким образом, предлагаемый способ позволяет избежать визуального контроля состояния срезного штифта во время работы. Такие меры, то есть визуальный контроль состояния срезного штифта, потребуют размещения сенсорного модуля на внешней поверхности механизированной секции крепи, т.е. исполнительном механизме. Однако во время работы механизированной секции крепи, из-за сильных механических воздействий окружающей среды, на такой сенсорный модуль будут воздействовать чрезмерные механические усилия, требующие применения прочной и дорогостоящей конструкции.
Таким образом, предлагается надежный способ обнаружения неисправности механизированной секции крепи исходя из изменения положения щита, который, кроме прочего, может быть реализован с минимальными затратами.
Предлагаемый способ можно использовать в комбинированных горных машинах длинных очистных забоев, содержащих множество механизированных секций крепи. Однако способ не ограничивается этой сферой применения и может использоваться в любой сфере добычи или удаления породы, которая включает, по меньшей мере, одну механизированную секцию крепи, как описано выше.
Исполнительный механизм в механизированной секции крепи выполняется для регулировки расстояния между щитом и устройством удаления породы. Как изложено выше, изменение положения щита определяется во время срабатывания исполнительного механизма. Срабатывание исполнительного механизма относится к приведению в действие исполнительного механизма для уменьшения расстояния между щитом и устройством удаления породы. Кроме того, срабатывание исполнительного механизма относится к приведению в действие исполнительного механизма для увеличения расстояния между щитом и устройством удаления породы. Исполнительный механизм может представлять собой линейный исполнительный механизм. Соответственно, срабатывание исполнительного механизма может представлять собой втягивание исполнительного механизма или выдвижение исполнительного механизма. Исполнительный механизм может содержать цилиндр и поршень, входящий в цилиндр, причем при срабатывании исполнительного механизма поршень перемещается, т.е. втягивается или выдвигается относительно цилиндра.
Как изложено выше, в ходе срабатывания исполнительного механизма выполняется этап определения изменения положения. В частности, изменение положения может представлять собой параметр, являющийся индикатором, указывающим расстояние, т.е. длину смещения щита, в частности, по отношению к первоначальному положению щита. Другими словами, изменение положения может являться индикатором или указывать на смещение щита относительно положения щита в начале срабатывания исполнительного механизма. Более конкретно, изменение положения может являться индикатором или указывать на изменение положения щита, по меньшей мере, в направлении устройства удаления породы. Направление может совпадать с направлением подачи механизированной секции крепи или комбинированной горной машины длинных очистных забоев.
Для определения изменения положения может использоваться датчик изменения положения. Например, датчик изменения положения может выполняться для определения изменения положения щита относительно себя, т.е. относительно первоначального положения. Для этого датчик изменения положения может представлять собой датчик ускорения, также называемый датчиком движения или акселерометром. Другими словами, изменение положения можно определить с помощью датчика ускорения.
Датчик ускорения может быть вмонтирован в щит. В случае использования такого датчика изменения положения можно избежать крепления к внешней поверхности механизированной секции крепи блоков измерения, необходимых для контроля работы механизированной секции крепи, т.е. для обнаружения состояния отказа или штатного состояния. Соответственно, предлагаемое решение позволяет предохранить компоненты, необходимые для выполнения предлагаемого способа, от воздействия чрезмерных механических нагрузок. Таким образом, можно гарантировать надежность устройства для выполнения способа и, следовательно, надежность самого способа.
Однако функции датчика изменения положения этим не ограничиваются. Скорее, любой сенсорный модуль, подходящий для измерения или определения параметра, указывающего на изменение положения щита, может использоваться в качестве датчика изменения положения.
Например, в другом варианте осуществления изобретения, датчик изменения положения может выполняться для определения изменения положения относительно, по меньшей мере, устройства удаления породы, дополнительной механизированной секции расположенной рядом с соседней механизированной секцией крепи, окружающей механизированную секцию крепи породы, в частности, породы, на которой находится механизированная секция крепи.
Это реализуется с помощью сенсорного модуля, который определяет расстояние между двумя точками, т.е. точки отправки и точки приема, на основе измерений времени выполнения или времени прохождения сигнала, передаваемого между двумя точками. Сенсорный модуль может содержать передатчик, расположенный, по меньшей мере, внутри щита или на нем и исполнительный механизм, и приемник или передатчик, расположенный в устройстве удаления породы или на нем, или наоборот.
Датчик может использовать электромагнитный сигнал в качестве сигнала, который должен быть передан и обнаружен. Например, сенсорный модуль может представлять собой оптический датчик, который излучает свет, напр. лазерный луч и обнаруживает отраженный свет. В качестве альтернативного варианта осуществления, сенсорный модуль может использовать радиоволны в качестве сигнала, который должен быть передан и обнаружен. Соответственно, сенсорный модуль может представлять собой беспроводное сенсорное устройство, например, сенсорное устройство Wi-Fi или Bluetooth.
На следующем этапе способа, как изложено выше, неисправность или состояние отказа механизированной секции крепи обнаруживается на основе определенного изменения положения. Этот этап может выполняться таким образом, чтобы состояние отказа механизированной секции крепи обнаруживалось в том случае, когда определенное изменение положения не указывает на штатное изменение положения щита во время срабатывания исполнительного механизма, а штатное состояния механизированной секции крепи обнаруживалось в том случае, когда определенное изменение положения указывает на штатное изменение положения щита.
Для определения, указывает или нет определенное изменение положения на штатное или точное изменение положения щита, определенное изменение положения можно сравнить с пороговым значением. Например, на этапе обнаружения неисправности определяется состояние отказа механизированной секции крепи, когда определенное изменение положения не превышает порогового значения, при этом штатное состояние механизированной секции крепи обнаруживается, когда определенное изменение положения равно или превышает пороговое значение.
В этом способе пороговое значение может быть определено в зависимости от срабатывания исполнительного механизма. Например, пороговое значение можно определить исходя из продолжительности срабатывания исполнительного механизма. Кроме того, пороговое значение можно определить исходя из изменения хода исполнительного механизма, т.е. времени срабатывания исполнительного механизма.
Способ может дополнительно содержать этап определения изменения хода исполнительного механизма во время срабатывания исполнительного механизма. Кроме того, этап обнаружения неисправности механизированной секции крепи может выполняться исходя из определенного изменения хода. Другими словами, на этапе обнаружения неисправности механизированной секции крепи неисправность механизированной секции крепи обнаруживают на основании определенного изменения положения и определенного изменения хода.
В частности, изменение хода относится к параметру, который является индикатором или указывает длину изменения хода, в частности, по отношению к первоначальному ходу исполнительного механизма до приведения в действие исполнительного механизма. Другими словами, изменение хода может являться индикатором или указывать на смещение, т.е. длину смещения поршня относительно цилиндра во время срабатывания исполнительного механизма.
В другом варианте осуществления, на этапе обнаружения неисправности определяется состояние отказа механизированной секции крепи, когда определенное изменение хода и определенное изменение положения не взаимосвязаны, при этом штатное состояние механизированной секции крепи обнаруживается, когда определенное изменение хода и определенное изменение положения взаимосвязаны.
Например, для принятия решения о том, взаимосвязано ли определенное изменение положения и определенное изменение хода, каждое определенное изменение положения и определенное изменение хода сравниваются с пороговым значением, соответственно. Соответственно, на этапе обнаружения неисправности, состояние отказа обнаруживается, когда абсолютное значение определенного изменения хода больше первого порогового значения, или когда абсолютное значение определенного изменения положения ниже второго порогового значения. Кроме того, штатное состояние можно обнаружить, когда абсолютное значение определенного изменения хода равно или больше, чем первое пороговое значение, а абсолютное значение определенного изменения положения равно или больше, чем второе пороговое значение.
В другом варианте осуществления, второе пороговое значение может определяться на основании определенного изменения хода. Таким образом, второе пороговое значение можно адаптировать в динамическом режиме.
Далее описывается структурная схема исполнительного механизма механизированной секции крепи. В частности, исполнительный механизм соединяется, по меньшей мере, со щитом или устройством удаления породы с помощью срезного штифта. Срезной штифт выполняется способным разъединять соединение между исполнительным механизмом, щитом и устройством удаления породы, когда механическое усилие, действующее на срезной штифт, превышает заранее заданное значение. Кроме того, исполнительный механизм может представлять собой линейный исполнительный механизм, в частности телескопический исполнительный механизм, содержащий цилиндр, прикрепленный к щиту, и поршень, прикрепленный к устройству удаления породы, или наоборот. Другими словами, цилиндр может размещаться со стороны щита, а поршень может размещаться со стороны исполнительного механизма устройства удаления породы. Кроме того, поршень может размещаться со стороны щита, а цилиндр может размещаться со стороны исполнительного механизма устройства удаления породы.
Кроме того, предлагается устройство контроля над работой механизированной секции крепи. Механизированная секция крепи содержит щит, соединенный с устройством удаления породы исполнительным механизмом для регулировки расстояния между щитом и устройством удаления породы. В частности, устройство контроля содержит сенсорный модуль для определения изменения положения щита во время срабатывания исполнительного механизма и устройство обнаружения неисправности механизированной секции крепи исходя определенного изменения положения.
В частности, предлагается устройство контроля для выполнения или осуществления вышеописанного способа. Соответственно, технические характеристики, которые описаны в связи с вышеупомянутым способом, также могут относиться и применяться в предлагаемом устройстве контроля, и наоборот.
Как изложено выше, устройство контроля может содержать сенсорный модуль и устройство обнаружения. Эти устройства могут относиться к функциональным устройствам, которые могут использоваться разными компонентами или одним компонентом. В частности, устройство обнаружения может использоваться для выполнения способа, как описано выше. Кроме того, сенсорный модуль может представлять собой датчик ускорения или содержать его.
С этой целью предлагается механизированная секция крепи для использования в комбинированной горной машине длинных очистных забоев. Механизированная секция крепи содержит описанное выше устройство контроля. Соответственно, технические характеристики, которые описаны в связи с устройством контроля и способом контроля, также могут относиться и применяться в предлагаемой механизированной секции крепи, и наоборот.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛИРУЕМОГО СОБЛЮДЕНИЯ ЗАЗОРА МЕЖДУ ВЕРХНИМ ПЕРЕКРЫТИЕМ И УГОЛЬНЫМ ЗАБОЕМ В ОЧИСТНЫХ ЗАБОЯХ | 2008 |
|
RU2470156C2 |
| Комплекс для проведения подготовительных выработок | 1978 |
|
SU870728A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО СОЗДАНИЯ ЗАДАННОГО ПРИЗАБОЙНОГО ПРОСТРАНСТВА ПРИ ОЧИСТНЫХ ЗАБОЙНЫХ РАБОТАХ В ПОДЗЕМНОЙ РАЗРАБОТКЕ КАМЕННОГО УГЛЯ | 2008 |
|
RU2459955C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЛИНИИ РЕЗАНИЯ СИСТЕМЫ ВЫЕМКИ ПРИ ПРОХОДКЕ И ЭЛЕМЕНТ РЕШТАКА ДЛЯ НЕЕ | 2008 |
|
RU2422635C1 |
| Концевая секция механизированной крепи | 1985 |
|
SU1372063A1 |
| СПОСОБ РАЗРАБОТКИ ПОЛОГОГО УГОЛЬНОГО ПЛАСТА | 2000 |
|
RU2187644C2 |
| СПОСОБ ПЕРЕВОДА ОЧИСТНОГО КОМБАЙНА НА НОВУЮ ВЫЕМОЧНУЮ ПОЛОСУ В ДЛИННЫХ КОМПЛЕКСНО-МЕХАНИЗИРОВАННЫХ ОЧИСТНЫХ ЗАБОЯХ (ВАРИАНТЫ) | 2009 |
|
RU2417316C2 |
| Механизированный очистнойКОМплЕКС СОВМЕщЕННОй ВыЕМКи | 1978 |
|
SU798315A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ ГОРИЗОНТА РЕЗАНИЯ ДОБЫЧНОЙ ГОРНОЙ УСТАНОВКИ | 1995 |
|
RU2107162C1 |
| ПРОХОДЧЕСКО-ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС (БЛОК) | 1998 |
|
RU2172410C2 |

Изобретение относится к способу и устройству контроля над работой механизированной секции крепи, в частности комбинированной горной машины длинных очистных забоев. Способ контроля над работой механизированной секции крепи (30), в частности комбинированной горной машины (10) длинных очистных забоев, имеющей щит (32), соединенный с устройством (12) удаления породы исполнительным механизмом (36) для регулировки расстояния между щитом (32) и устройством (12) удаления породы; способу, включающему этапы: определения изменения положения щита (32) во время приведения в действие исполнительного механизма (36); определения изменения хода исполнительного механизма (36) во время приведения его в действие; обнаружения неисправности механизированной секции крепи (30) исходя из определенного изменения положения; обнаружения неисправности механизированной секции крепи (30) исходя из определенного изменения хода; при этом состояние отказа обнаруживается, когда абсолютное значение определенного изменения хода больше первого порогового значения или когда абсолютное значение определенного изменения положения ниже второго порогового значения. Устройство контроля (60) над работой механизированной секции крепи (30), имеющей щит (32), соединенный с устройством (12) удаления породы исполнительным механизмом (36) для регулировки расстояния между щитом (32) и устройством (12) удаления породы. Механизированная секция крепи (30) для использования в комбинированной горной машине длинных очистных забоев (10), содержащая устройство контроля. Техническим результатом является создание надежного способа и устройства контроля для обнаружения неисправности механизированной секции крепи. 3 н. и 15 з.п. ф-лы, 6 ил.
1. Способ контроля над работой механизированной секции крепи (30), в частности комбинированной горной машины (10) длинных очистных забоев, имеющей щит (32), соединенный с устройством (12) удаления породы исполнительным механизмом (36) для регулировки расстояния между щитом (32) и устройством (12) удаления породы; способ включает этапы:
- определения изменения положения щита (32) во время приведения в действие исполнительного механизма (36);
- определения изменения хода исполнительного механизма (36) во время приведения его в действие;
- обнаружения неисправности механизированной секции крепи (30) исходя из определенного изменения положения;
- обнаружения неисправности механизированной секции крепи (30) исходя из определенного изменения хода;
при этом состояние отказа обнаруживается, когда абсолютное значение определенного изменения хода больше первого порогового значения или когда абсолютное значение определенного изменения положения ниже второго порогового значения.
2. Способ по п. 1, отличающийся тем, что приведение в действие исполнительного механизма представляет собой втягивание исполнительного механизма (36).
3. Способ по п. 1 или 2, отличающийся тем, что определенное изменение положения является индикатором изменения положения щита (32), в частности, по отношению к первоначальному положению щита (32).
4. Способ по любому из пп. 1-3, отличающийся тем, что изменение положения является индикатором изменения положения щита вдоль направления (Х), указывающего на устройство (12) удаления породы.
5. Способ по любому из пп. 1-4, отличающийся тем, что изменение положения определяется с помощью датчика (62) изменения положения, выполненного для определения изменения положения щита относительно, по меньшей мере, первоначального положения щита (32), устройства (12) удаления породы и дополнительной механизированной секции крепи, расположенной рядом с механизированной секцией крепи (30) и рядом с окружающей механизированную секцию крепи (30) породой.
6. Способ по любому из пп. 1-5, отличающийся тем, что изменение положения определяется с помощью датчика (62) ускорения.
7. Способ по любому из пп. 1-6, отличающийся тем, что на этапе обнаружения неисправности определяется состояние отказа механизированной секции крепи (30), когда определенное изменение положения не указывает на изменение положения щита, при этом штатное состояние механизированной секции крепи (30) обнаруживается, когда определенное изменение положения указывает на изменение положения щита.
8. Способ по любому из пп. 1-7, отличающийся тем, что на этапе обнаружения неисправности определяется состояние отказа механизированной секции крепи (30), когда определенное изменение положения не превышает порогового значения, при этом штатное состояние механизированной секции крепи (30) обнаруживается, когда определенное изменение положения равно или превышает пороговое значение.
9. Способ по п. 1, отличающийся тем, что определенное изменение хода является индикатором длины изменения хода, в частности, по отношению к начальному ходу исполнительного механизма (36) до приведения в действие исполнительного механизма.
10. Способ по п. 1 или 9, отличающийся тем, что на этапе обнаружения неисправности определяется состояние отказа механизированной секции крепи (30), когда определенное изменение хода и определенное изменение положения не взаимосвязаны, при этом штатное состояние механизированной секции крепи (30) обнаруживается, когда определенное изменение хода и определенное изменение положения взаимосвязаны.
11. Способ по любому из пп. 9 или 10, отличающийся тем, что штатное состояние обнаруживается, когда абсолютное значение определенного изменения хода равно или больше, чем первое пороговое значение, а абсолютное значение определенного изменения положения равно или больше, чем второе пороговое значение.
12. Способ по п. 11, отличающийся тем, что второе пороговое значение определяется исходя из определенного изменения хода.
13. Способ по любому из пп. 1-12, отличающийся тем, что исполнительный механизм (36) соединен по меньшей мере с одним щитом (32) и устройством (12) удаления породы срезным штифтом (46), способным осуществлять разъединение между исполнительным механизмом (36) и по меньшей мере одним щитом (32) и устройством (12) удаления породы, когда механическое усилие, действующее на срезной штифт (46), превышает заранее заданное значение.
14. Способ по любому из пп. 1-9, отличающийся тем, что исполнительный механизм (36) представляет собой линейный исполнительный механизм, в частности телескопический исполнительный механизм, содержащий цилиндр (38), прикрепленный к щиту (32), и поршень (30), прикрепленный к устройству (12) удаления породы.
15. Устройство контроля (60) над работой механизированной секции крепи (30), имеющей щит (32), соединенный с устройством (12) удаления породы исполнительным механизмом (36) для регулировки расстояния между щитом (32) и устройством (12) удаления породы, отличающееся тем, что устройство (60) контроля содержит:
- сенсорный модуль (62) для определения изменения положения щита (32) во время приведения в действие исполнительного механизма (36);
- датчик перемещения (66) для определения изменения хода исполнительного механизма (36) во время приведения его в действие; и
- устройство (64) обнаружения неисправности механизированной секции крепи (30) исходя из определенного изменения положения и определенного изменения хода;
при этом состояние отказа обнаруживается, когда абсолютное значение определенного изменения хода больше первого порогового значения или когда абсолютное значение определенного изменения положения ниже второго порогового значения.
16. Устройство контроля по п. 15, отличающееся тем, что устройство (64) обнаружения способно осуществлять способ по любому из пп. 1-14.
17. Устройство контроля по п.15 или 16, отличающееся тем, что сенсорный модуль (62) представляет собой датчик ускорения.
18. Механизированная секция крепи (30) для использования в комбинированной горной машине длинных очистных забоев (10), содержащая устройство контроля по любому из пп. 15-17.
| СПОСОБ ПРОИЗВОДСТВА ПАРОВЫХ ХЛЕБОБУЛОЧНЫХ ИЗДЕЛИЙ ИЗ КОМПОЗИТНОЙ СМЕСИ (ВАРИАНТЫ) | 2012 |
|
RU2536918C2 |
| СИСТЕМА УПРАВЛЕНИЯ СЕКЦИЯМИ КРЕПИ В ОЧИСТНОМ ЗАБОЕ ШАХТЫ | 2003 |
|
RU2334108C2 |
| RU 2060395 C1, 20.05.1996 | |||
| Антифрикционный сплав на алюминиевой основе | 1954 |
|
SU105668A1 |
| БЛОК УПРАВЛЕНИЯ СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОЙ СЕКЦИЕЙ СВОИХ ФУНКЦИЙ ПРИ КРЕПЛЕНИИ ЛАВЫ В ГОРНОЙ ВЫРАБОТКЕ | 2008 |
|
RU2463451C2 |
| Устройство для неразрушающего контроля теплофизических характеристик материала | 1983 |
|
SU1122952A1 |
| Лаг | 1926 |
|
SU16460A1 |
| US 20170019641 A1, 19.01.2017. | |||

