1. Область техники
[0001] Изобретение относится к устройствам помощи при вождении, останавливающим транспортное средство путем автоматического торможения и удерживающим его в остановленном состоянии.
2. Раскрытие предшествующего уровня техники
[0002] Способ остановки транспортного средства при помощи автоматического торможения известен из уровня техники. Например, обычное устройство для предотвращения столкновений применяет автоматическое торможение и останавливает транспортное средство, повышая давление гидравлического масла, подаваемого в тормозное устройство (давление тормозной жидкости), когда передний датчик, например, датчик камеры или радара, распознает объект, с которым может столкнуться транспортное средство. После остановки транспортного средства при помощи автоматического торможения такое вспомогательное устройство удерживает транспортное средство в остановленном состоянии, управляя удержанием тормоза, а именно, поддерживая высокое давление тормозной жидкости в течение заданного времени (например, 2 секунд).
[0003] Вспомогательное устройство, предложенное в патентной заявке Японии № 2019-84984 (JP 2019-84984 A), не прошедшей экспертизу (в дальнейшем – устройство предшествующего уровня техники), отменяет (прекращает) управление удержанием тормоза во время маневра, выполняемого водителем (например, нажатие педали газа или тормоза и т.д.), если будет установлено, что после остановки транспортного средства средствами автоматического торможения желательно удерживать его в остановленном состоянии дольше заданного времени. Например, транспортное средство желательно удерживать в остановленном состоянии дольше заданного времени в ситуациях, когда транспортное средство останавливается прямо перед перекрестком или останавливается вследствие обнаружения транспортного средства, движущегося в направлении, пересекающем направление движения транспортного средства, или в иных подобных ситуациях. В этом случае управление удержанием тормоза отменяется в момент обнаружения маневра, выполняемого водителем.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Тем не менее, устройство предшествующего уровня техники отменяет управление удержанием тормоза только тогда, когда оно распознает маневр, выполняемый водителем. Соответственно, устройство предшествующего уровня техники может прекратить управление удержанием тормоза, если обнаружит, что водитель нажал неправильную педаль. В этом случае транспортное средство не будет останавливаться даже в той ситуации, когда остановка необходима.
[0005] В ситуации с включением автоматического торможения водитель может запутаться и не выполнить необходимый маневр. Например, водитель может по ошибке нажать педаль акселератора, даже если он намеревался нажать педаль тормоза. В этом случае управление удержанием тормоза отменяется вследствие нажатия на педаль акселератора, и транспортное средство может внезапно ускориться в соответствии с нажатием педали акселератора.
[0006] Кроме того, устройство предшествующего уровня техники не учитывает ситуацию вокруг транспортного средства, прекращая управлять удержанием тормоза при распознавании маневра, выполняемого водителем. Соответственно, при прекращении управления удержанием тормоза вследствие нажатия водителем неправильной педали транспортное средство может столкнуться с препятствием или начать движение, нарушая законы и правила.
[0007] Изобретением предложено техническое решение, в котором управление удержанием тормоза прекращается, если система определяет, что транспортное средство будет находиться в безопасности даже после прекращения управления удержанием тормоза.
[0008] Первый аспект изобретения относится к устройству помощи при вождении. Устройство помощи при вождении содержит: блок автоматического торможения, выполненный с возможностью управления автоматическим торможением при распознавании выполнения заданного условия автоматической остановки, причем управление автоматическим торможением осуществляется с приложением к транспортному средству тормозного усилия для автоматической остановки транспортного средства; блок удержания тормоза, выполненный с возможностью управления удержанием тормоза таким образом, чтобы транспортное средство, остановленное блоком автоматического торможения, не могло двигаться вперед или назад, причем управление удержанием тормоза осуществляется с приложением к транспортному средству тормозного усилия для удержания транспортного средства в остановленном состоянии; блок отмены удержания тормоза, выполненный с возможностью отмены управления удержанием тормоза при обнаружении выполнения заданного условия в период, когда блок управления удержанием тормоза управляет удержанием тормоза; блок получения информации об окружающей обстановке, выполненный с возможностью получения информации о ситуации вокруг транспортного средства; блок получения информации о маневре, выполненный с возможностью получения информации о маневрировании, выполняемом водителем транспортного средства; блок определения маневра, выполненный с возможностью определения соответствия маневра, совершенного во время управления удержанием тормоза, ситуации вокруг транспортного средства на основании полученной информации об окружающей обстановке и маневрах; и блок запрета, который может запретить блоку отмены удержания тормоза подачу на блок удержания тормоза команды на прекращение управления удержанием тормоза до тех пор, пока блок определения маневра определяет маневр как несоответствующий ситуации, даже если выполняется заданное условие отмены.
[0009] Вышеописанное устройство помощи при вождении содержит блок автоматического торможения, блок удержания тормоза и блок отмены удержания тормоза. Блок автоматического торможения управляет автоматическим торможением, в частности, прилагает к транспортному средству тормозное усилие для автоматической остановки транспортного средства, когда будет обнаружено выполнение заданного условия автоматической остановки. Например, при обнаружении препятствия, с которым может столкнуться транспортное средство, блок автоматического торможения приводит в действие тормозное устройство (развивает тормозное усилие), чтобы остановить транспортное средство, не требуя от водителя нажатия педали тормоза.
[0010] Блок удержания тормоза управляет удержанием тормоза, в частности, прилагает к транспортному средству тормозное усилие для удержания транспортного средства в остановленном состоянии, препятствуя движению транспортного средства, остановленного блоком автоматического торможения, в направлении вперед и назад. Таким образом, транспортное средство остается неподвижным. Блок отмены удержания тормоза прекращает управление удержанием тормоза, если заданное условие прекращения будет выполняться во время осуществления управления удержанием тормоза. В дальнейшем вместо «прекращение управления удержанием тормоза» иногда будет использоваться «прекращение удержания тормоза».
[0011] Удержание тормоза должно прекращаться, когда это становится безопасным. Таким образом, изобретением предусмотрен блок получения информации об окружающей обстановке, блок получения информации о маневрах, блок определения маневра и блок запрета. Блок получения информации об окружающей обстановке получает информацию о ситуации вокруг транспортного средства. Например, блок получения информации об окружающей обстановке получает информацию о препятствиях вокруг транспортного средства. В альтернативном варианте блок получения информации об окружающей обстановке может получать значимую информацию, отображаемую объектом транспортной инфраструктуры, например, светофором в зоне вокруг транспортного средства.
[0012] Блок определения маневра получает информацию о маневре, выполняемом водителем транспортного средства. Например, блок определения маневра получает информацию о маневре, выполняемом водителем (информацию о нажатии педали акселератора или тормоза).
[0013] Блок определения маневра на основании полученной информации об окружающей обстановке и маневре определяет, соответствует ли маневр, выполняемый во время управления удержанием тормоза, ситуации вокруг транспортного средства.
[0014] Например, блок определения маневра определяет, что маневр, который выполняется водителем во время управления удержанием тормоза и при котором транспортное средство может приблизиться к препятствию или совершить недопустимое перемещение после прекращения управления удержанием тормоза, не соответствует ситуации вокруг транспортного средства.
[0015] Даже если условие прекращения выполняется, блок запрета запрещает блоку отмены удержания тормоза подавать на блок удержания тормоза команду на прекращение управления удержанием тормоза до тех пор, пока блок определения маневра расценивает маневр, как не соответствующий ситуации.
[0016] В соответствии с изобретением, удержание тормоза может быть прекращено только в том случае, если эта операция не несет опасности. В результате при прекращении управления удержанием тормоза снижается вероятность начала движения транспортного средства, не инициированного водителем, и столкновения транспортного средства с препятствием.
[0017] В вышеописанном устройстве помощи при вождении блок отмены удержания тормоза может быть выполнен таким образом, чтобы заданное условие прекращения считалось выполненным, если время удержания тормоза равняется или превышает установленное пороговое время прекращения, а педаль акселератора не нажата, причем время удержания тормоза соответствует периоду, в течение которого управление удержанием тормоза выполняется непрерывно.
[0018] При применении автоматического торможения должно пройти определенное время, прежде чем водитель сможет спокойно оценить ситуацию и выполнить маневр. Поэтому транспортное средство следует удерживать в остановленном состоянии в течение определенного периода времени. В одном из аспектов изобретения условие прекращения считается выполненным, если время удержания тормоза, соответствующее периоду, в течение которого управление удержанием тормоза выполняется непрерывно, равно или превышает установленное пороговое время прекращения, а педаль акселератора не нажата. Если блок определения маневра расценивает маневр, как соответствующий ситуации вокруг транспортного средства, когда время удержания тормоза равно или превышает установленное пороговое время прекращения, то управление удержанием тормоза прекращается в этот момент. Тем не менее, если блок определения маневра расценивает маневр, как не соответствующий ситуации вокруг транспортного средства, когда время удержания тормоза равно или превышает установленное пороговое время прекращения, то управление удержанием тормоза продолжается без прекращения. В соответствии с вышеизложенным аспектом, удержание тормоза прекращается тогда, когда это становится безопасным.
[0019] В вышеописанном устройстве помощи при вождении блок отмены удержания тормоза может быть выполнен с возможностью определения того, был ли выполнен определенный маневр, оцениваемый как предполагаемый водителем, во время управления удержанием тормоза, и, когда блок отмены удержания тормоза определяет выполнение определенного маневра, с возможностью определения того, что заданное условие прекращения выполняется даже тогда, когда время удержания тормоза меньше порогового времени прекращения.
[0020] Рассмотрим случай, в котором водитель намеренно выполняет маневр вождения в течение непродолжительного времени после того, как транспортное средство было остановлено средствами автоматического торможения. В этом случае желательно прекратить удержание тормоза еще до того, как время удержания достигнет порогового времени прекращения. В данном аспекте изобретения блок отмены удержания тормоза определяет, был ли определенный маневр, оцениваемый как предполагаемый водителем, выполнен во время управления удержанием тормоза. Когда блок отмены удержания тормоза определяет, что определенный маневр был выполнен, блок отмены удержания тормоза считает условие прекращения выполненным даже в том случае, если время удержания тормоза меньше порогового времени прекращения. Если блок определения маневра расценивает определенный выполняемый маневр как соответствующий ситуации вокруг транспортного средства, управление удержанием тормоза прекращается в этот момент. Тем не менее, если блок определения маневра расценивает определенный выполняемый маневр как не соответствующий ситуации вокруг транспортного средства, управление удержанием тормоза продолжается без прекращения.
[0021] В соответствии с аспектом изобретения, удержание тормоза прекращается в соответствующее время. Таким образом, водитель может привести транспортное средство в движение до того, как время удержания тормоза достигнет порогового времени прекращения.
[0022] В указанном выше устройстве помощи при вождении определенным маневром может считаться повторное нажатие педали акселератора, выполняемое во время управления удержанием тормоза.
То есть определенный маневр может заключаться в том, что водитель снимает ногу с педали акселератора, после чего снова нажимает педаль акселератора. Это повторное нажатие педали акселератора может быть расценено как маневр, задуманный (предполагаемый к выполнению) водителем. Соответственно, в случае распознавания повторного нажатия педали акселератора удержание тормоза прекращается и не возобновляется до тех пор, пока этот маневр соответствует ситуации вокруг транспортного средства.
[0023] В указанном выше устройстве помощи при вождении определенным маневром может считаться нажатие педали тормоза, выполняемое при нулевой степени нажатия педали акселератора во время управления удержанием тормоза. При управлении автоматическим торможением нажатие педали тормоза, выполняемое без нажатия педали акселератора, может быть расценено как маневр, задуманный водителем. Этот маневр соответствует ситуации вокруг транспортного средства, потому что не является маневром, приводящим транспортное средство в движение. Соответственно, удержание тормоза может быть прекращено в момент распознавания нажатия педали тормоза.
[0024] В вышеописанном устройстве помощи при вождении блок определения маневра может быть выполнен с возможностью определения нецелесообразности маневра, если во время управления удержанием тормоза на основании полученной информации об окружающей обстановке будет обнаружено препятствие, с которым может столкнуться транспортное средство, и на основании полученной информации о маневре будет обнаружена нажатая педаль акселератора.
[0025] В этом случае удержание тормоза не прекращается, даже если водитель по ошибке нажмет педаль акселератора. Поэтому вероятность столкновения транспортного средства с препятствием снижается.
[0026] В вышеописанном устройстве помощи при вождении блок определения маневра может быть выполнен с возможностью определения нецелесообразности маневра, если во время управления удержанием тормоза на основании полученной информации об окружающей обстановке будет обнаружено препятствие, с которым может столкнуться транспортное средство, и на основании полученной информации о маневре будет обнаружено, что педаль тормоза не нажата.
[0027] Если удержание тормоза будет прекращено, когда педаль тормоза не нажата, транспортное средство придет в движение на малом ходу. Согласно аспекту изобретения, при наличии препятствия, с которым может столкнуться транспортное средство, удержание тормоза не прекращается, если не нажать педаль тормоза. Соответственно, вероятность столкновения транспортного средства с препятствием на малом ходу снижается.
[0028] В вышеописанном устройстве помощи при вождении блок определения маневра может быть выполнен с возможностью определения нецелесообразности маневра, если во время управления удержанием тормоза на основании полученной информации об окружающей обстановке будет распознана ситуация, в которой начало движения транспортного средства окажется противоправным, и на основании полученной информации о маневре будет обнаружена нажатая педаль акселератора.
[0029] Например, запрещается въезд на перекресток, если транспортное средство остановилось прямо перед перекрестком, и на светофоре на перекрестке горит красный сигнал. Согласно аспекту изобретения, удержание тормозов не прекращается даже в том случае, если водитель по ошибке нажимает педаль акселератора в ситуации, когда начало движения транспортного средства противоправно. Таким образом, водитель получает возможность соблюдать законы и правила. Кроме того, уменьшается вероятность столкновения транспортного средства с другим транспортным средством, наезда на пешехода и иных происшествий.
[0030] В вышеописанном устройстве помощи при вождении блок определения маневра может быть выполнен с возможностью определения нецелесообразности маневра, если во время управления удержанием тормоза на основании полученной информации об окружающей обстановке будет распознана ситуация, в которой начало движения транспортного средства окажется противоправным, и на основании полученной информации о маневре будет обнаружено, что педаль тормоза не нажата.
[0031] Согласно аспекту изобретения, если водитель не нажимает педаль тормоза, и возникла ситуация, в которой начало движения транспортного средства является противоправным, удержание тормоза не прекращается. Это позволяет водителю соблюдать законы и правила. Кроме того, уменьшается вероятность столкновения транспортного средства с другим транспортным средством, наезда на пешехода и иных происшествий.
[0032] В устройстве помощи при вождении согласно вышеупомянутому аспекту блок определения маневра может быть выполнен с возможностью определения присутствия водителя на водительском сиденье во время управления удержанием тормоза, а также определения нецелесообразности маневра, если будет обнаружено отсутствие водителя на водительском сиденье.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0033] Отличительные признаки, преимущества, техническая и промышленная значимость примеров осуществления настоящего изобретения раскрыты ниже со ссылкой на сопроводительные чертежи, в которых одинаковые обозначения относятся к одинаковым элементам:
На ФИГ. 1 изображена схема компоновки устройства помощи при вождении согласно одному из вариантов осуществления изобретения;
На ФИГ. 2 изображена блок-схема, иллюстрирующая алгоритм управления отменой удержания тормоза;
На ФИГ. 3 изображена временная диаграмма в соответствии с одним из вариантов осуществления;
На ФИГ. 4 изображена временная диаграмма в соответствии с одним из вариантов осуществления;
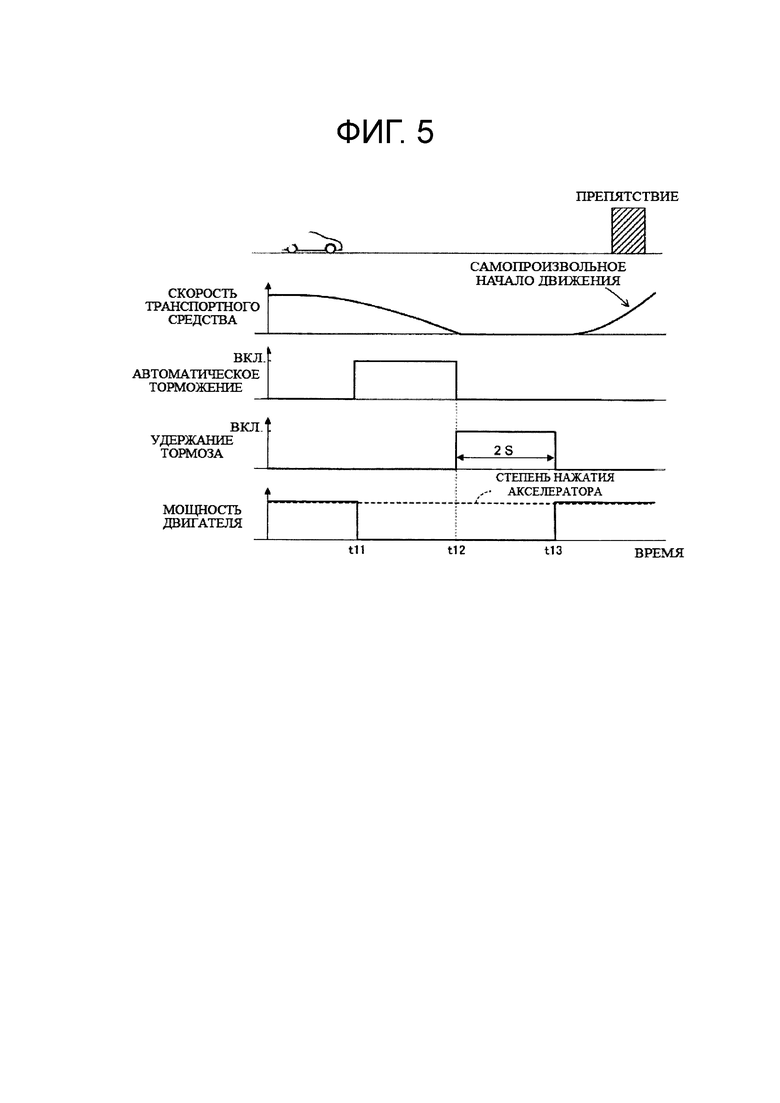
На ФИГ. 5 изображена временная диаграмма в соответствии со сравнительным примером; и
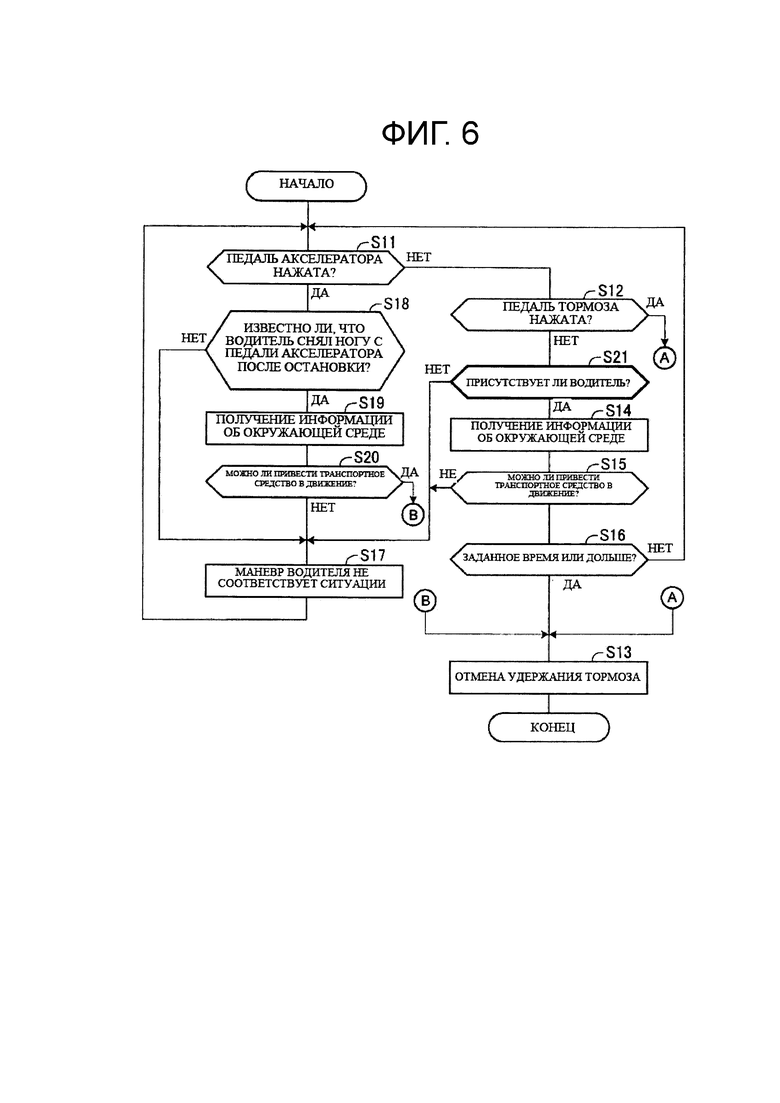
На ФИГ. 6 изображена блок-схема, иллюстрирующая модифицированный алгоритм управления удержанием тормоза.
ПОДРОБНОЕ РАСКРЫТИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0034] Устройство помощи при вождении в соответствии с одним из вариантов осуществления настоящего изобретения подробно раскрыто ниже со ссылкой на сопроводительные чертежи.
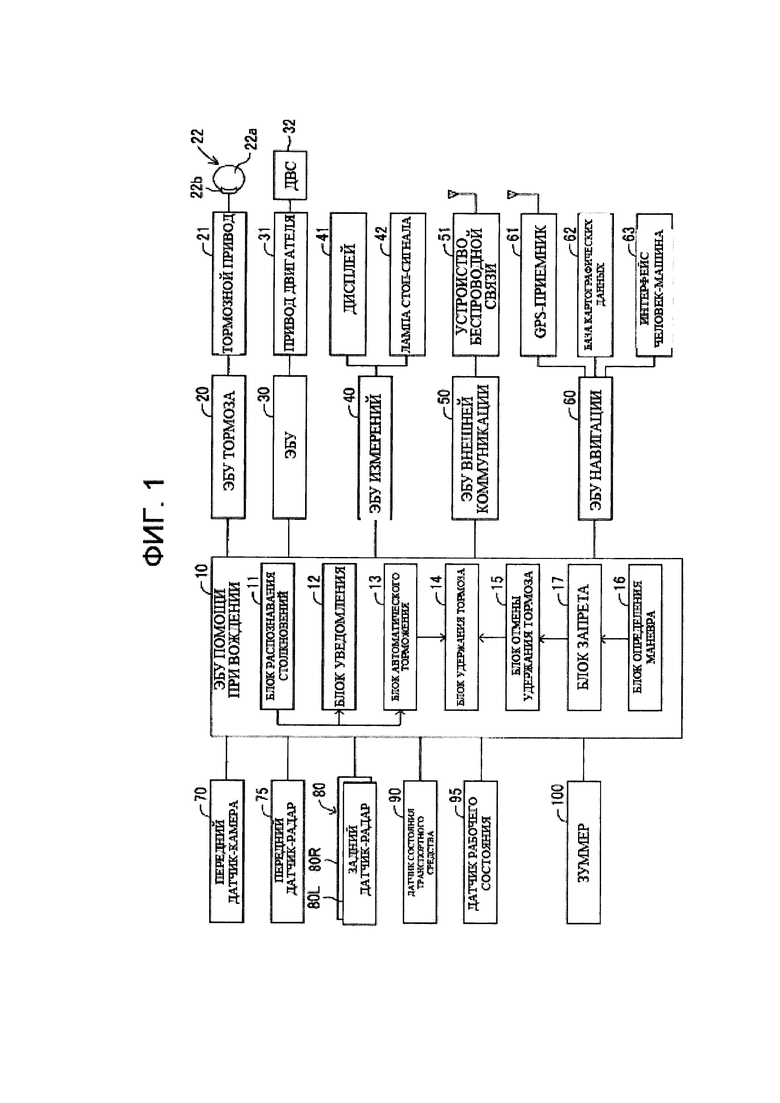
[0035] Устройство помощи при вождении в соответствии с одним из вариантов осуществления изобретения используется в транспортном средстве и, как показано на ФИГ. 1, содержит ЭБУ (ЭБУ – электронный блок управления) 10 помощи при вождении, ЭБУ 20 торможения, ЭБУ 30 двигателя, ЭБУ 40 измерений, ЭБУ 50 внешней коммуникации и ЭБУ 60 навигации.
[0036] Эти ЭБУ представляют собой электронные блоки управления, каждый из которых в качестве основной части содержит микрокомпьютер, и которые соединены друг с другом шиной CAN, не показанной на фигурах, что позволяет им обмениваться информацией. В данной конфигурации микрокомпьютер содержит центральный процессор (ЦП), постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ), энергонезависимую память, интерфейс I/F и т.п. ЦП реализует различные функции посредством выполнения инструкций (программ, алгоритмом), хранящихся в ПЗУ. Часть или все ЭБУ могут быть интегрированы в один ЭБУ.
[0037] ЭБУ 10 помощи при вождении является центральным устройством управления, помогающим водителю в управлении транспортным средством. ЭБУ 10 помощи при вождении выполняет функцию помощи в предупреждении столкновений. Функция помощи в предотвращении столкновений представляет собой функцию управления, выводящую водителю сигнал, когда перед транспортным средством обнаруживается препятствие, и предотвращающую столкновение транспортного средства с препятствием путем автоматического торможения, когда вероятность столкновения возрастает. Так как функцию помощи в предотвращении столкновений обычно называют системой предаварийной безопасности (PCS), в дальнейшем она будет называться функцией PCS.
[0038] ЭБУ 10 помощи при вождении подключена к переднему датчику-камере 70, радиолокационному переднему датчику (датчику-радару) 75, радиолокационному заднему датчику (датчику-радару) 80, датчику 90 состояния транспортного средства, датчику 95 рабочего состояния и зуммеру (звуковому сигнализатору) 100.
[0039] Передний датчик-камера 70 вида устанавливается в верхней части лобового стекла в салоне и ведет съемку пространства перед транспортным средством. Передний датчик-камера 70 распознает белую разметку на дороге и трехмерный объект, находящийся перед транспортным средством, на основании видеоизображения и передает полученную информацию (информацию о белой разметке и трехмерном объекте) в ЭБУ 10 помощи при вождении с заданной периодичностью. Информация о белой разметке указывает на форму белой разметки, взаимное расположение транспортного средства и белой разметки и т.д. Информация о трехмерном объекте указывает на тип трехмерного объекта, обнаруженного перед транспортным средством, размер трехмерного объекта, взаимное расположение трехмерного объекта и транспортного средства и т.п.
[0040] Передний датчик-камера 70 распознает информацию, поступающую от объекта дорожной инфраструктуры, в частности, светофора и дорожного знака, регулирующего движение транспортных средств в соответствии с законами и правилами. Кроме того, датчик-камера 70 передает информацию, поступающую от объекта дорожной инфраструктуры (далее – информацию дорожной инфраструктуры) в ЭБУ 10 помощи при вождении с заданной периодичностью. Распознавание типа трехмерного объекта и информации, отражаемой объектом дорожной инфраструктуры, реализуется, например, средствами машинного обучения.
[0041] Передний датчик-радар 75 устанавливается в центре передней части кузова транспортного средства и распознает трехмерные объекты в зоне перед транспортным средством. Передний датчик-радар 75 излучает радиоволны в миллиметровом диапазоне (в дальнейшем «миллиметровые волны») и принимает миллиметровые волны, отраженные трехмерным объектом (например, другим транспортным средством, пешеходом, велосипедом, зданием и т.д.), находящимся в пределах диапазона излучения (то есть отраженных волн). Передний датчик-радар 75 рассчитывает расстояние между транспортным средством и трехмерным объектом, относительную скорость между транспортным средством и трехмерным объектом, положение (направление) трехмерного объекта относительно транспортного средства и т.д. на основании разности фаз между излучаемыми миллиметровыми волнами и принимаемыми отраженными волнами, уровня затухания отраженных волн, времени между излучением миллиметровых волн и приемом отраженных волн и т.п. Передний датчик-радар 75 с заданной периодичностью передает информацию о результатах вычислений (информацию о трехмерных объектах) в ЭБУ 10 помощи при вождении.
[0042] ЭБУ 10 помощи при вождении объединяет информацию о трехмерных объектах, поступающую с переднего датчика-камеры 70 и переднего датчика-радара 75, для получения информации о трехмерных объектах, характеризующейся высокой точностью.
[0043] В дальнейшем датчик-камера 70 и датчик-радар 75 совместно будут называться передним датчиком, а информация о зоне перед транспортным средством, полученная от переднего датчика-камеры 70 и переднего датчика-радара 75 – информацией от переднего датчика.
[0044] Задний радиолокационный датчик 80 (задний датчик-радар) содержит правый задний радиолокационный датчик 80R и левый задний радиолокационный датчик 80L. Правый задний радиолокационный датчик 80R установлен в правом заднем углу кузова транспортного средства, а левый задний радиолокационный датчик 80L – в левом заднем углу кузова транспортного средства. Ось контролируемой зоны правого заднего радиолокационного датчика 80R ориентирована по диагонали назад вправо, что позволяет обнаруживать трехмерные объекты в зоне по диагонали сзади и справа от транспортного средства. Ось контролируемой зоны левого заднего радиолокационного датчика 80L ориентирована по диагонали назад влево, что позволяет обнаруживать трехмерные объекты в зоне по диагонали сзади и слева от транспортного средства. Способ распознавания трехмерного объекта задним радиолокационным датчиком 80 аналогичен переднему радиолокационному датчику 75.
[0045] Задний радиолокационный датчик 80 передает информацию о трехмерном объекте, представляющую собой информацию об обнаруженном трехмерном объекте, в ЭБУ 10 помощи при вождении с заданной периодичностью. В дальнейшем информация о зоне по диагонали сзади и справа от транспортного средства, а также о зоне по диагонали сзади и слева от транспортного средства, полученная от заднего радиолокационного датчика 80, называется информацией заднего датчика. Информация, полученная от датчика 70 камеры переднего вида, переднего радиолокационного датчика 75 и заднего радиолокационного датчика 80, описывает ситуацию вокруг транспортного средства и иногда называется информацией об окружающей обстановке.
[0046] Датчик 90 состояния транспортного средства представляет собой, например, датчик скорости транспортного средства, датчик продольного ускорения, датчик поперечного ускорения, датчик скорости рыскания и т.д. Датчик скорости транспортного средства распознает скорость движения транспортного средства, датчик продольного ускорения – продольное ускорение транспортного средства, датчик поперечного ускорения – поперечное ускорение транспортного средства, а датчик скорости рыскания – скорость рыскания транспортного средства.
[0047] Датчик 95 рабочего состояния представляет собой датчик или переключатель, распознающий маневр (маневр вождения), выполняемый водителем. Датчик 95 рабочего состояния представляет собой датчик степени нажатия педали акселератора, датчик степени нажатия тормоза, переключатель тормоза, датчик угла поворота рулевого колеса, датчик крутящего момента рулевого управления, датчик положения селектора переключения передач и т.д. Датчик степени нажатия педали акселератора распознает степень нажатия педали акселератора, датчик степени нажатия тормоза – степень нажатия педали тормоза, переключатель тормоза – факт нажатия педали тормоза, датчик угла поворота рулевого колеса – угол поворота, датчик крутящего момента рулевого управления – крутящий момент рулевого управления, а датчик положения селектора переключения передач – положение переключения коробки передач. Информация, полученная от датчика 95 рабочего состояния, представляет собой информацию о маневре, выполняемом водителем транспортного средства, и иногда называется информацией о маневре.
[0048] Информация, полученная датчиком 90 состояния транспортного средства и датчиком 95 рабочего состояния (в дальнейшем – информация датчика), передается по шине CAN (не показанной на фигурах) в ЭБУ 10 помощи при вождении с заданной периодичностью.
[0049] Зуммер 100 подает звуковой сигнал в соответствии с командами ЭБУ 10 помощи при вождении. Для оповещения водителя ЭБУ 10 помощи при вождении передает команду подачи звукового сигнала на зуммер 100. Это позволяет предупреждать водителя.
[0050] ЭБУ 20 тормоза соединен с тормозным приводом 21. Тормозной привод 21 установлен в гидравлическом контуре между главным цилиндром (не показанным на фигуре), сжимающим гидравлическое масло под действием усилия на педали тормоза, и фрикционными тормозными механизмами 22, установленными на правых и левых передних и задних колесах. Фрикционный тормозной механизм 22 содержит тормозной диск 22a, прикрепленный к колесу, и тормозной суппорт 22b, прикрепленный к кузову транспортного средства. Тормозной привод 21 регулирует давление масла, подаваемого на колесный цилиндр, входящий в состав тормозного суппорта 22b, в соответствии с командой от ЭБУ 20 тормоза. Тормозной привод 21 приводит колесный цилиндр в действие с помощью давления масла и, тем самым, прижимает тормозную колодку к тормозному диску 22a, создавая силу трения торможения. ЭБУ 20 тормоза устанавливает запрошенное водителем замедление, руководствуясь степенью нажатия педали тормоза, регистрируемой датчиком степени нажатия педали тормоза, и управляет работой тормозного привода 21 таким образом, чтобы транспортное средство замедлялось в соответствии с запрошенным водителем замедлением. Когда ЭБУ 20 тормоза получает команду PCS на торможение от ЭБУ 10 помощи при вождении, ЭБУ 20 тормоза активизирует тормозной привод 21 таким образом, чтобы транспортное средство замедлялось с запрошенным PCS замедлением. Запрошенное PCS замедление представляет собой информацию, включенную в команду PCS торможения.
[0051] ЭБУ 30 двигателя соединен с приводом 31 двигателя. Привод 31 изменяет рабочее состояние двигателя 32 (двигателя внутреннего сгорания) и содержит, например, привод дроссельной заслонки, изменяющий степень открытия дроссельной заслонки. ЭБУ 30 двигателя устанавливает запрошенный водителем крутящий момент на основании степени нажатия педали акселератора, распознанной датчиком величины нажатия на педаль газа, и скорости транспортного средства, распознанной датчиком скорости транспортного средства, и активизирует привод 31 двигателя таким образом, чтобы двигатель 32 выдавал запрошенный водителем крутящий момент. Когда ЭБУ 30 двигателя получает команду на ограничение мощности от ЭБУ 10 помощи при вождении, ЭБУ 30 двигателя активизирует привод 31 двигателя таким образом, чтобы ограничить крутящий момент, выдаваемый двигателем 32. Если транспортное средство является электромобилем, привод 31 двигателя представляет собой приводное устройство электродвигателя. Если транспортное средство является гибридным транспортным средством, привод 31 двигателя представляет собой приводное устройство обычного двигателя и электродвигателя.
[0052] ЭБУ 40 измерений соединен с дисплеем 41 и лампой 42 стоп-сигнала. ЭБУ 40 измерений может отображать информацию, имеющую отношение к помощи при вождении, на дисплее 41 в соответствии с командой от ЭБУ 10 помощи при вождении. ЭБУ 40 измерений может включать лампу 42 стоп-сигнала в соответствии с командой, поступающей от ЭБУ 10 помощи при вождении или от ЭБУ 20 тормоза.
[0053] ЭБУ 50 внешней коммуникации подключен к устройству 51 беспроводной связи. Устройство 51 беспроводной связи принимает информацию о дорожной инфраструктуре от придорожных устройств, установленных на дороге, и т.д. Устройство 51 беспроводной связи передает полученную информацию о дорожной инфраструктуре в ЭБУ 50 внешней коммуникации. Когда ЭБУ 50 внешней коммуникации получает запрос на получение информации о дорожной инфраструктуре от ЭБУ 10 помощи при вождении, ЭБУ 50 внешней коммуникации передает информацию о дорожной инфраструктуре, полученную устройством 51 беспроводной связи, в ЭБУ 10 помощи при вождении.
[0054] Информация о дорожной инфраструктуре включает информацию о перекрестках, дорожной ситуации и т.д. Информация о перекрестке включает информацию о сигнале светофора на перекрестке, на котором установлено придорожное устройство, информацию об обнаружении транспортного средства вблизи перекрестка (например, в пределах заданного расстояния от центра перекрестка), информацию об обнаружении пешехода вблизи перекрестка, а также информацию о схеме перекрестка, указывающую на форму дороги на перекрестке и форму каждой дороги, соединенной с перекрестком. Информация о сигнале светофора включает информацию, которая может указывать на период времени, в течение которого горит красный (или зеленый) сигнал светофора в соответствии с интервалами смены зеленого, желтого и красного сигнала светофора, время, в течение которого горит зеленый, желтый и красный сигнал светофора и т.д. Информация о дорожной инфраструктуре включена в раскрытую выше информацию об окружающей обстановке.
[0055] ЭБУ 60 навигации подключен к GPS-приемнику 61, базе 62 картографических данных, интерфейсу «человек-машина» 63 (человеко-машинному интерфейсу, далее - ЧМИ) и т.д. GPS-приемник 61 получает GPS-сигнал для определения текущего положения транспортного средства. База 62 картографических данных хранит картографическую информацию. В ЧМИ 63 используется сенсорный дисплей и прочее подобное оборудование. ЭБУ 60 навигации определяет текущее положение транспортного средства на основании сигнала GPS, выполняет различные расчеты на основании положения транспортного средства, а также картографической и прочей информации, хранящейся в базе 62 картографических данных, а также прокладывает маршрут с помощью ЧМИ 63.
PCS-управление
[0056] Ниже будет раскрыто PCS-управление, использующее автоматическое торможение. ЭБУ 10 помощи при вождении содержит блок 11 распознавания столкновений, блок 12 уведомления, блок 13 автоматического торможения, блок 14 удержания тормоза, блок 15 отмены удержания тормоза, блок 16 определения маневра и блок 17 запрета.
[0057] Блок 11 распознавания столкновений определяет вероятность столкновения транспортного средства с расположенным перед ним трехмерным объектом на основании информации, поступающей от переднего датчика, и состояния транспортного средства, обнаруженного датчиком 90 состояния транспортного средства. Например, блок 11 распознавания столкновений определяет вероятность столкновения транспортного средства с трехмерным объектом в том случае, если трехмерный объект сохраняет свое текущее состояние движения (неподвижное состояние в том случае, если трехмерный объект является неподвижным), а транспортное средство сохраняет свое текущее состояние движения. Когда блок 11 распознавания столкновений обнаруживает вероятность столкновения транспортного средства с трехмерным объектом, он идентифицирует трехмерный объект как препятствие по результатам определения.
[0058] При обнаружении препятствия блок 11 распознавания столкновений рассчитывает прогнозируемое время до столкновения (TTC - time to collision). Прогнозируемое время до столкновения TTC – это прогнозируемое время до столкновения транспортного средства с препятствием. Прогнозируемое время до столкновения TTC рассчитывается по следующей формуле (1) на основании расстояния d между препятствием и транспортным средством и скорости Vr транспортного средства относительно препятствия.
TTC = d/Vr (1)
[0059] Прогнозируемое время до столкновения TTC используется в качестве индекса возможности столкновения транспортного средства с препятствием. Чем меньше значение прогнозируемого времени до столкновения TTC, тем выше вероятность столкновения транспортного средства с препятствием (тем выше риск столкновения).
[0060] В PCS-управлении согласно настоящему варианту осуществления вероятность столкновения транспортного средства с препятствием делится на два уровня в зависимости от прогнозируемого времени до столкновения TTC. На начальном, то есть первом уровне, блок 12 уведомления предупреждает водителя с помощью зуммера 100 и дисплея 41. На втором уровне, на котором вероятность столкновения транспортного средства с препятствием выше, чем на первом уровне, блок 13 автоматического торможения активизирует тормоз (управление автоматическим торможением) для помощи в предотвращении столкновения.
[0061] В этом случае блок 11 распознавания столкновений определяет, что вероятность столкновения транспортного средства с препятствием достигла первого уровня, когда прогнозируемое время до столкновения TTC уменьшается до порога TTCw предупреждения или более низкого значения. Блок 11 распознавания столкновений определяет, что вероятность столкновения транспортного средства с препятствием достигла второго уровня, когда прогнозируемое время до столкновения TTC снижается далее до порога TTCa действия (< TTCw). В этом примере блок 11 распознавания столкновений считает заданное условие автоматической остановки выполненным, когда вероятность столкновения транспортного средства с препятствием достигает второго уровня.
[0062] Если будет определено, что вероятность столкновения транспортного средства с препятствием достигла второго уровня, блок 13 автоматического торможения посылает команду PCS на торможение в ЭБУ 20 тормоза. Команда PCS торможения содержит информацию, указывающую на запрошенное PCS замедление Gpcs.
[0063] Запрошенное PCS замедление Gpcs можно рассчитать следующим образом. Например, в случае остановки препятствия расстояние X до точки остановки транспортного средства может быть выражено следующим уравнением (2).
X = V⋅t + (1/2)⋅a⋅t2 (2)
В выражении (2) V выражает текущую (относительную) скорость транспортного средства, a (< 0) – замедление транспортного средства, t – время до остановки транспортного средства. Время t до остановки транспортного средства может быть выражено следующим уравнением (3).
t = –V/a (3)
Подстановкой выражения (3) в выражение (2), расстояние X до точки остановки транспортного средства может быть определено следующим уравнением (4).
X = –V2/2a (4)
Для остановки транспортного средства на расстоянии β перед препятствием, при расчете замедления a расстояние X принимается равным расстоянию d, обнаруженному передним датчиком, за вычетом расстояния β (расстояние (d - β)). Если препятствие движется, замедление a рассчитывается по скорости и замедлению транспортного средства относительно препятствия.
[0064] Рассчитанное таким образом замедление a используется в качестве запрошенного PCS замедления Gpcs. Запрошенное PCS замедление Gpcs имеет заданный верхний предел Gmax. Когда найденное запрошенное PCS замедление Gpcs превышает верхний предел Gmax, запрошенное PCS замедление Gpcs принимается равным верхнему пределу Gmax.
[0065] Когда ЭБУ 20 торможения получает команду PCS на торможение, он активизирует тормозной привод 21 для достижения запрошенного PCS замедления Gpcs. Таким образом, на правых и левых передних и задних колесах создается сила трения торможения, при этом водителю не нужно нажимать педаль тормоза, чтобы остановить транспортное средство. Когда транспортное средство останавливается, блок 14 удержания тормоза управляет ЭБУ 20 тормоза вместо блока 13 автоматического торможения. Таким образом, осуществляется управление автоматическим торможением.
[0066] Когда блок 14 удержания тормозов подтверждает, что транспортное средство остановлено средствами автоматического торможения, он передает команду удержания тормоза на ЭБУ 20 тормоза, чтобы удерживать транспортное средство в остановленном состоянии (то есть исключить перемещение транспортного средства вперед или назад). Получив команду на удержание тормоза, ЭБУ 20 тормоза активизирует тормозной привод 21 для нагнетания давления масла в колесных цилиндрах фрикционных тормозных механизмов 22 правого и левого переднего и заднего колеса до уровня, обеспечивающего удержание транспортного средства в остановленном состоянии. Таким образом, транспортное средство остается неподвижным. В дальнейшем удержание транспортного средства в остановленном состоянии иногда называют удержанием тормоза. Управление удержанием транспортного средства в остановленном состоянии иногда называют управлением удержанием тормоза.
[0067] ЭБУ 10 помощи при вождении передает команду ограничения мощности на ЭБУ 30 двигателя во время управления автоматическим торможением и удержанием тормоза. Команда ограничения мощности подразумевает ограничение крутящего момента на выходном валу двигателя (например, снижение до нуля). ЭБУ 20 тормоза передает команду включения лампы 42 стоп-сигнала на ЭБУ 40 измерений во время управления автоматическим торможением и удержанием тормоза.
[0068] Блок 15 отмены удержания тормоза определяет, выполняется ли заданное условие прекращения, которое будет подробно раскрыто ниже. При выполнении условия прекращения блок 15 отмены удержания тормоза передает команду отмены удержания тормоза в ЭБУ 20 тормоза. Таким образом, ЭБУ 20 тормоза прекращает активизацию тормозного привода 21, выполнявшуюся для удержания тормоза. Таким образом, прекращается удержание тормоза транспортного средства (то есть управление удержанием тормоза) и PCS-управление. Блок 15 отмены удержания тормоза передает команду отмены ограничения мощности в ЭБУ 30 двигателя. Таким образом, транспортное средство возвращается в нормальное состояние, в котором оно может совершать маневры ускорения и замедления в зависимости от нажатия педали акселератора и тормоза.
Управление отменой удержания тормоза
[0069] Удержание тормоза (управление удержанием тормоза) транспортного средства должно прекращаться только в том случае, если эта операция может быть выполнена безопасно. Например, на уровне техники известно устройство, отменяющее удержание тормоза (управление удержанием тормоза) после определенного времени удерживания транспортного средства в остановленном состоянии (управления удержанием тормоза). При использовании этого известного устройства возможна ситуация, в которой удержание тормоза прекращается при наличии препятствия непосредственно перед транспортным средством. В этом случае транспортное средство начинает движение на малом ходу, если только водитель в это время не нажмет педаль тормоза. В результате транспортное средство может столкнуться с препятствием или чрезмерно приблизиться к нему. Кроме того, если водитель введен в заблуждение автоматическим торможением и продолжает нажимать педаль акселератора вместо тормоза, удержание тормоза может быть отменено, и транспортное средство может внезапно разогнаться.
[0070] Кроме того, существует устройство, продолжающее управлять удержанием тормоза, если будет установлена желательность удержания транспортного средства в остановленном состоянии (то есть продолжения управления удержанием тормоза) даже по истечении определенного времени с момента остановки транспортного средства автоматическим торможением, и прекращающее удержание тормоза (управление удержанием тормоза) в тот момент, когда после этого будет распознан маневр, выполняемый водителем. Тем не менее, с помощью этого устройства можно отменить удержание тормоза, если водитель совершает неправильное управляющее действие, например, нажимает неправильную педаль. В этом случае удержание тормоза не продолжается даже тогда, когда оно должно продолжаться.
[0071] В данном варианте осуществления условие прекращения (то есть отмены удержания тормоза) будет считаться выполненным, если маневр, выполняемый водителем во время управления удержанием тормоза, будет признан соответствующим ситуации вокруг транспортного средства на основании информации о маневре, выполняемом водителем (информации о маневре), и информации о ситуации вокруг транспортного средства (информации об окружающей обстановке).
[0072] Это определение включает в себя не только определение соответствия маневра, выполняемого водителем, ситуации вокруг транспортного средства, но и определение невыполнения водителем маневра, соответствующего ситуации вокруг транспортного средства. То есть если водитель не выполняет маневр, соответствующий ситуации вокруг транспортного средства, может быть установлено, что маневр, выполняемый водителем, является нецелесообразным. В дальнейшем маневры вождения, выполняемые водителем, называются просто маневрами, выполняемыми водителем.
[0073] К нецелесообразным маневрам водителя относятся маневры, при совершении которых транспортное средство при прекращении удержания тормоза может приблизиться к препятствию или совершить неправомочное перемещение.
[0074] Блок 16 определения маневра на основании информации об окружающей обстановке и маневре определяет, соответствует ли маневр, выполняемый водителем во время удерживания транспортного средства в остановленном состоянии путем управления удержанием тормоза, ситуации вокруг транспортного средства.
[0075] Когда блок 16 определения маневра обнаруживает, что «маневр, выполняемый водителем во время удерживания транспортного средства в остановленном состоянии, не соответствует ситуации вокруг транспортного средства», блок 17 запрета запрещает блоку 15 отмены удержания тормоза передавать на блок 14 удержания тормоза команду на прекращение управления удержанием тормоза.
[0076] Ниже будут приведены примеры, в которых блок 16 определения маневра расценивает маневр, выполняемый водителем, как соответствующий ситуации вокруг транспортного средства. Известные устройства могут прекращать управление удержанием тормоза в следующих примерах.
- Педаль тормоза не нажата в ситуации, когда препятствие обнаружено непосредственно перед транспортным средством (прямо перед транспортным средством).
- Педаль акселератора нажата в ситуации, когда перед транспортным средством обнаружено препятствие.
- Препятствие обнаружено в предполагаемом направлении движения транспортного средства при повороте рулевого колеса и нажатии педали акселератора.
- Педаль акселератора нажата, когда перед транспортным средством ожидается движение объекта (другого транспортного средства, пешехода, велосипеда и т.д.) по пересекающейся траектории.
- Педаль акселератора нажата, когда движущийся объект (другое транспортное средство, пешеход, велосипед и т.д.), приближающийся к транспортному средству по диагонали сзади, может пересечь траекторию его движения.
- Педаль акселератора нажата, когда перед транспортным средством горит красный сигнал светофора.
- Педаль акселератора нажата со времени перед включением автоматического торможения и удерживается в нажатом состоянии.
[0077] Блок 15 отмены удержания тормоза считает условие прекращения выполненным при выполнении любого из следующих условий.
Условие прекращения 1: Время, прошедшее с момента остановки транспортного средства с помощью автоматического торможения, в течение которого осуществляется непрерывное управление удержанием тормоза (в дальнейшем иногда называемое «временем удержания»), равно установленному времени или превышает его, а педаль акселератора не нажата.
Условие прекращения 2: Определенный маневр, который может быть расценен как маневр, задуманный водителем, выполнялся в течение периода непрерывного управления удержанием тормоза (во время удержания тормоза).
[0078] Определенным маневром согласно условию прекращения 2 считается повторное нажатие педали акселератора во время удержания тормоза и/или педали тормоза во время удержания тормоза без нажатия педали акселератора.
[0079] Нажатие педали тормоза, нажатие педали акселератора и поворот рулевого колеса не считаются маневрами, выполняемыми водителем, если при их осуществлении не могут быть выполнены существенные функции (функция замедления, ускорения и рулевого управления), например, если такие маневры выполняются мгновенно и в том случае, если их величина (степень нажатия педали тормоза, степень нажатия педали акселератора и степень поворота рулевого колеса) очень мала. Соответственно, чтобы такие маневры можно было расценивать как маневры, выполняемые водителем, они должны постоянно распознаваться в течение определенного времени или дольше, а их распознанное количество должно соответствовать определенной величине или превышать ее.
Алгоритм управления отменой удержания тормоза
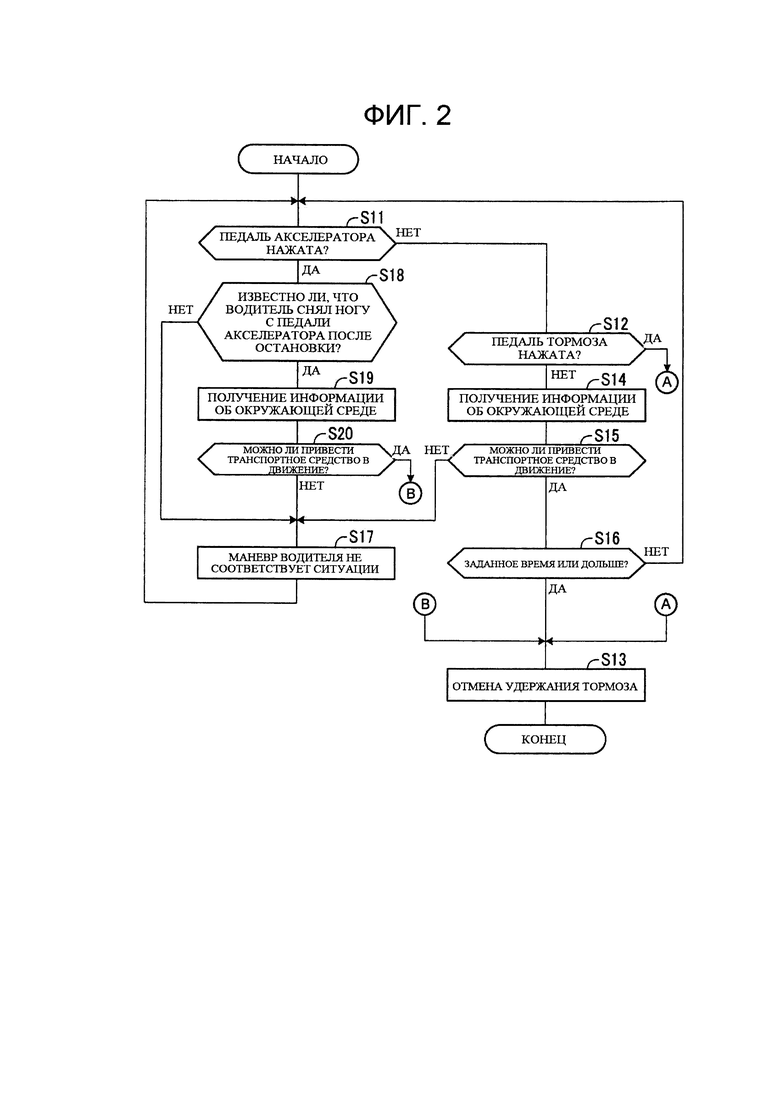
[0080] Ниже будет раскрыт пример управления отменой удержания тормоза, выполняемого с помощью ЭБУ 10 помощи при вождении (функциональные блоки, соответствующие блоку 15 отмены удержания тормоза, блоку 16 определения маневра и блоку 17 запрета). На ФИГ. 2 изображен алгоритм управления отменой удержания тормоза, выполняемый ЭБУ 10 помощи при вождении. ЭБУ 10 помощи при вождении запускает алгоритм управления отменой удержания тормоза, когда транспортное средство остановлено посредством PCS-управления (управления автоматическим торможением), и удержание тормоза инициировано управлением удержанием тормоза.
[0081] При запуске алгоритма управления отменой удержания тормоза ЭБУ 10 помощи при вождении на этапе S11 определяет, нажата ли педаль акселератора. В этом случае ЭБУ 10 помощи при вождении на основании степени нажатия педали акселератора, регистрируемой датчиком степени нажатия педали акселератора, определяет, соответствует ли степень нажатия педали акселератора достаточному ускорению.
[0082] Когда нажатие педали акселератора не обнаружено (S11: Нет), алгоритм переходит к этапу S12. На этапе S12 ЭБУ 10 помощи при вождении определяет, нажата ли педаль тормоза. В этом случае ЭБУ 10 помощи при вождении на основании степени нажатия педали тормоза, регистрируемой датчиком степени нажатия тормоза, определяет, соответствует ли степень нажатия педали тормоза достаточному замедлению.
[0083] Результатом определения на этапе S12 будет «Да» в том случае, если водитель не нажал педаль акселератора, но нажал педаль тормоза. В этом случае можно считать, что водитель нажал педаль тормоза намеренно. Транспортное средство не придет в движение, даже если отменить (прекратить) управление удержанием тормоза с целью прекращения удержания тормоза. Соответственно, в этом случае алгоритм переходит к этапу S13, на котором ЭБУ 10 помощи при вождении прекращает управление удержанием тормоза. В частности, на этапе S13 ЭБУ 10 помощи при вождении передает команду на отмену удержания тормоза в ЭБУ 20 тормоза и команду на отмену ограничения мощности в ЭБУ 30 двигателя. Таким образом, PCS-управление вместе с управлением удержанием тормоза прекращается, вследствие чего транспортное средство может совершать маневры ускорения и замедления в зависимости от нажатия педали акселератора и тормоза водителем.
[0084] После выполнения этапа S13 (отмены управления удержанием тормоза) ЭБУ 10 помощи при вождении завершает алгоритм отмены управления удержанием тормоза. Когда ЭБУ 10 помощи при вождении завершает алгоритм управления отменой удержания тормоза, алгоритм управления отменой удержания тормоза не будет выполняться до тех пор, пока транспортное средство остановлено посредством управления автоматическим торможением, и удержание тормоза инициировано управлением удержанием тормоза.
[0085] С другой стороны, если нажатие педали тормоза не обнаружено (S12: Нет), то есть когда не нажата ни педаль акселератора, ни педаль тормоза, алгоритм переходит к этапу S14. На этапе S14 ЭБУ 10 помощи при вождении получает информацию об окружающей обстановке, например, информацию переднего датчика, поступающую с переднего датчика, и информацию заднего датчика, поступающую с заднего радиолокационного датчика 80. Впоследствии, на этапе S15 ЭБУ 10 помощи при вождении определяет, может ли транспортное средство начать движение (гарантирована ли безопасность транспортного средства) на основании информации об окружающей обстановке. В данном случае под началом движения понимают начало движения транспортного средства после прекращения управления удержанием тормозов, в частности, начало движения на малом ходу.
[0086] Например, если препятствие находится прямо перед транспортным средством, после прекращения управления удержанием тормоза транспортное средство может начать движение на малом ходу и столкнуться с препятствием. Соответственно, ЭБУ 10 помощи при вождении определяет, что заторможенное транспортное средство не должно начинать движение (S15: Нет) в ситуации, когда транспортное средство не отделено от препятствия расстоянием (безопасным расстоянием между транспортным средством и препятствием), позволяющим водителю нажать педаль тормоза и остановить транспортное средство до его столкновения с препятствием. Кроме того, ЭБУ 10 помощи при вождении может определить, что заторможенное транспортное средство не следует приводить в движение, когда перед ним горит красный сигнал светофора (то есть, когда начало движения транспортного средства неправомочно).
[0087] Когда ЭБУ 10 помощи при вождении определяет, что транспортное средство может быть приведено в движение (S15: Да), алгоритм переходит к этапу S16. На этапе S16 ЭБУ 10 помощи при вождении проверяет время, прошедшее с момента начала текущего управления удержанием тормоза (время удержания), на предмет соответствия или превышения заданного времени (например, 2 секунд). Например, при запуске управления удержанием тормоза ЭБУ 10 помощи при вождении запускает таймер синхронно с запуском управления удержанием тормоза и считывает значение таймера для определения на этапе S16. Установленное время соответствует «пороговому времени прекращения».
[0088] Если время удержания не достигло заданного значения (S16: Нет), алгоритм возвращается на этап S11, а ЭБУ 10 помощи при вождении повторяет раскрытую выше обработку.
[0089] Когда ЭБУ 10 помощи при вождении по истечении заданного времени удержания распознает нажатие педали акселератора или тормоза (S12: Нет) и отсутствие проблем при начале движения транспортного средства малым ходом (S15: Да), алгоритм переходит к этапу S13. Таким образом, управление удержанием тормоза отменяется.
[0090] Если педаль газа не нажата (S11: Нет), а педаль тормоза нажата (S12: Да) до того, как время удержания достигнет заданного значения (S11: Нет), управление удержанием тормоза прекращается, как только будет распознано нажатие педали тормоза, даже если время удержания еще не достигло заданного значения.
[0091] С другой стороны, если результатом определения на этапе S15 будет «Нет», например, при наличии препятствия, с которым транспортное средство может столкнуться при начале движения малым ходом, алгоритм переходит к этапу S17. На этапе S17 ЭБУ 10 помощи при вождении определяет, что маневр, выполняемый водителем, не соответствует ситуации, и алгоритм возвращается к этапу S11.
[0092] Ниже будет рассмотрен пример, в котором нажата педаль акселератора. Если ЭБУ 10 помощи при вождении на этапе S11 определяет нажатие педали акселератора (S11: Да), алгоритм переходит к этапу S18. ЭБУ 10 помощи при вождении на этапе S18 определяет, снимал ли водитель ногу с педали акселератора (то есть отпускал ли педаль акселератора) после того, как транспортное средство было остановлено средствами автоматического торможения (после инициации управления удержанием тормоза).
[0093] При применении автоматического торможения водитель может оказаться дезориентирован и не сможет рассуждать здраво. Соответственно, существует риск нажатия неправильной педали, а именно: водитель может по ошибке продолжать нажимать педаль акселератора вместо педали тормоза. Если в этой ситуации управление удержанием тормоза будет отменено, транспортное средство может внезапно начать движение (ускориться) в соответствии с нажатием педали акселератора.
[0094] С другой стороны, если водитель вновь нажимает педаль акселератора во время управления удержанием тормоза, в частности, если водитель снимает ногу с педали акселератора, а затем снова нажимает педаль акселератора во время управления удержанием тормоза, можно предположить, что педаль акселератора нажата намеренно для приведения транспортного средства в движение.
[0095] Соответственно, процесс на этапе S18 предназначен для определения того, было ли текущее нажатие педали акселератора выполнено случайно (S18: Нет) или намеренно с целью приведения транспортного средства в движение (S18: Да).
[0096] Если ЭБУ 10 помощи при вождении определяет, что педаль акселератора нажата постоянно (S18: Нет), алгоритм переходит к этапу S17. На этапе S17 ЭБУ 10 помощи при вождении определяет, что маневр, выполняемый водителем, не соответствует ситуации, и алгоритм возвращается к этапу S11.
[0097] С другой стороны, когда ЭБУ 10 помощи при вождении определяет повторное нажатие педали акселератора (S18: Да), алгоритм переходит к этапу S19. На этапе S19 ЭБУ 10 помощи при вождении получает информацию об окружающей обстановке (информацию переднего датчика, поступающую с переднего датчика, и информацию заднего датчика, поступающую с заднего радиолокационного датчика 80). Впоследствии, на этапе S20 ЭБУ 10 помощи при вождении определяет, может ли транспортное средство начать движение, на основании информации об окружающей обстановке. В данном случае под началом движения понимают начало движения транспортного средства после прекращения управления удержанием тормозов и движение на малом ходу при нажатии педали акселератора.
[0098] Например, результатом определения на этапе S20 будет «Нет» в любой из следующих ситуаций.
1. Обнаружено препятствие перед транспортным средством (например, на заданном расстоянии от транспортного средства).
2. Повернуто рулевое колесо и обнаружено препятствие в предполагаемом направлении движения транспортного средства.
3. Перед транспортным средством ожидается движение объекта (другого транспортного средства, пешехода, велосипеда и т.д.) по пересекающейся траектории.
4. Движущийся объект (другое транспортное средство, пешеход, велосипед и т.д.), приближающийся к транспортному средству по диагонали сзади, может пересечь траекторию его движения.
5. Перед транспортным средством горит красный сигнал светофора.
[0099] Если результатом определения на этапе S20 будет «Нет», алгоритм переходит к этапу S17. На этапе S17 ЭБУ 10 помощи при вождении определяет, что маневр, выполняемый водителем, не соответствует ситуации, и алгоритм возвращается к этапу S11.
[0100] ЭБУ 10 помощи при вождении повторяет эту обработку. Соответственно, управление удержанием тормоза не прекращается до тех пор, пока выполняемый водителем маневр будет расцениваться как не соответствующий ситуации.
[0101] Если результатом определения на этапе S20 будет «Да», алгоритм переходит к этапу S13, и ЭБУ 10 помощи при вождении прекращает управление удержанием тормоза. Таким образом, PCS-управление прекращается.
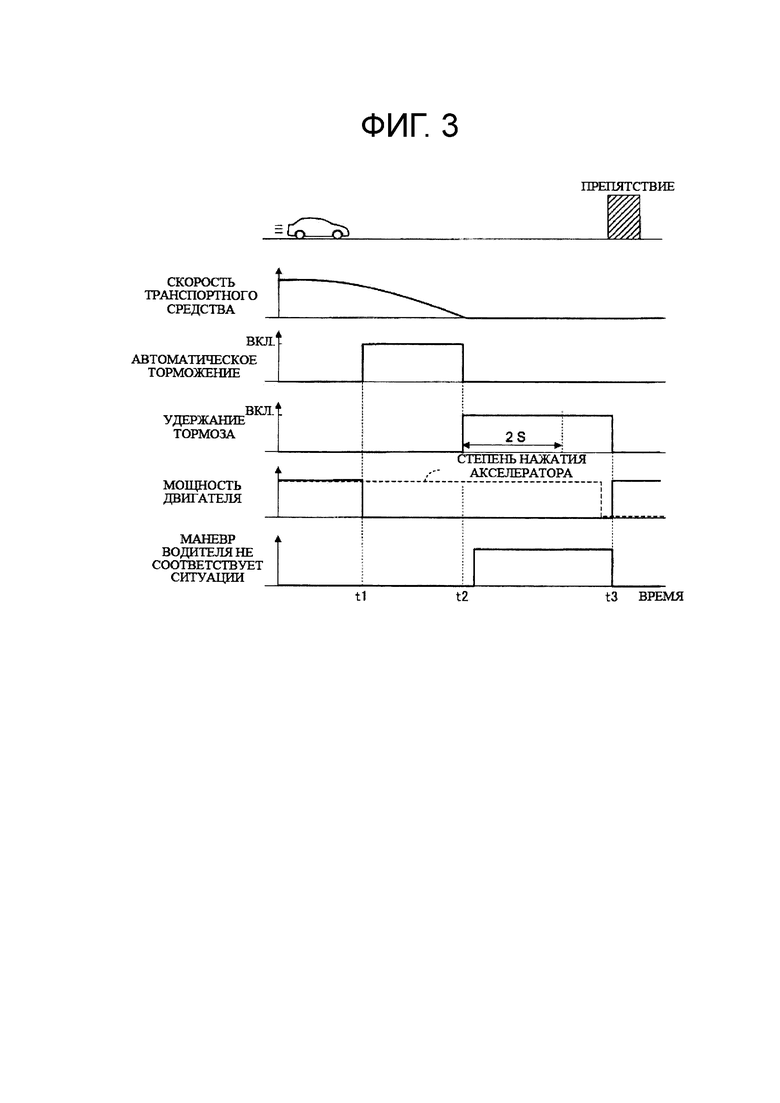
[0102] На ФИГ. 3 изображена временная диаграмма, иллюстрирующая пример синхронизации при отмене удержания тормоза. Управление автоматическим торможением запускается в момент t1 времени. В момент t2 транспортное средство останавливается, и инициируется управление удержанием тормоза. В данном примере водитель продолжает нажимать педаль акселератора даже при запуске управления удержанием тормоза. После инициации управления удержанием тормоза обнаруживается, что выполняемый водителем маневр не соответствует ситуации. Когда водитель продолжает нажимать педаль акселератора даже по истечении заданного времени (например, 2 секунд) с момента инициации управления удержанием тормоза, этот маневр, выполняемый водителем, расценивается как не соответствующий ситуации, и управление удержанием тормоза продолжается.
[0103] В момент t3 обнаруживается, что водитель прекратил нажимать педаль акселератора. Удержание тормоза прекращается в этот момент времени, если нет проблем с началом движения транспортного средства (S15: Да).
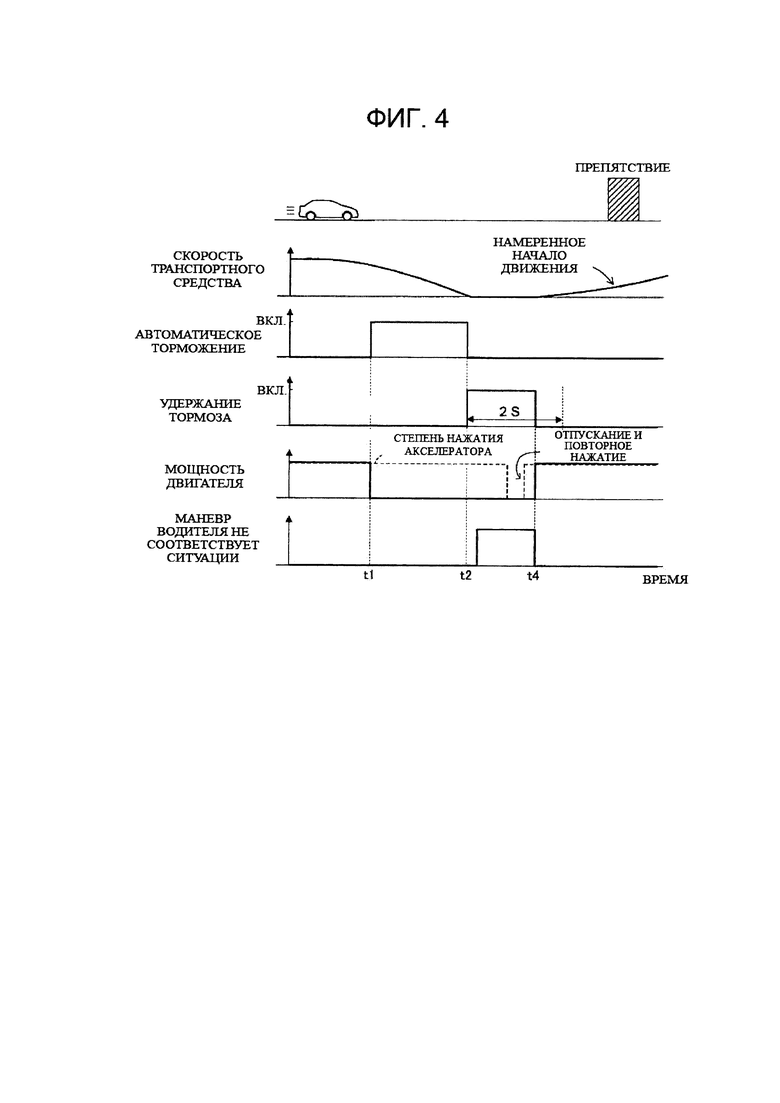
[0104] На ФИГ. 4 изображен пример, в котором водитель повторно нажал педаль акселератора во время удержания тормоза. Повторное нажатие педали акселератора водителем обнаруживается в момент t4 времени. В этом случае, еще до того, как время удержания достигнет заданного значения, управление удержанием тормоза будет прекращено, если нет проблем с началом движения транспортного средства (S20: Да). Таким образом, транспортное средство начинает движение в соответствии с намерениями водителя.
[0105] На ФИГ. 5 изображена временная диаграмма, иллюстрирующая вариант синхронизации, в котором управление удержанием тормоза прекращается в известном устройстве (сравнительный пример). Автоматическое торможение запускается в момент t11 времени. В момент t12 транспортное средство останавливается, и инициируется управление удержанием тормоза. В данном примере водитель продолжает нажимать педаль акселератора даже при запуске управления удержанием тормоза. Управление удержанием тормоза прекращается в момент t13 времени, в частности, по истечении заданного времени (например, 2 секунд) с момента начала управления удержанием тормоза. В это время, так как педаль акселератора еще нажата, транспортное средство внезапно начинает движение, когда управление удержанием тормоза будет прекращено.
[0106] Как было раскрыто выше, в соответствии с предложенным устройством помощи при вождении при прекращении управления удержанием тормоза соответствие маневра, выполняемого водителем при остановленном транспортном средстве, ситуации вокруг транспортного средства определяется на основании информации о маневре, выполняемом водителем, и информации о ситуации вокруг транспортного средства. Если будет установлено, что маневр, выполняемый водителем, не соответствует ситуации вокруг транспортного средства, прекращение управления удержанием тормоза запрещается. С другой стороны, если при синхронизации не будет подтверждено выполнение условия прекращения, а выполняемый водителем маневр будет соответствовать ситуации вокруг транспортного средства, то управление удержанием тормоза будет прекращено. Удержание тормоза (управление удержанием тормоза) может быть прекращено, если эта операция может быть выполнена безопасно. В результате при прекращении управления удержанием тормоза снижается вероятность внезапного начала движения транспортного средства, не инициированного водителем, и столкновения транспортного средства с препятствием.
[0107] Когда во время управления удержанием тормоза выполняется маневр, который может быть расценен как маневр, задуманный водителем, управление удержанием тормоза прекращается еще до того, как время удержания достигнет заданного значения. В этом случае управление удержанием тормоза будет прекращено при условии, что маневр, выполняемый водителем, будет соответствовать ситуации вокруг транспортного средства. Таким образом, водитель может намеренно привести транспортное средство в движение до того, как время удержания достигнет заданного значения.
[0108] Например, повторное нажатие педали акселератора может быть расценено как маневр, задуманный водителем. Соответственно, в случае обнаружения повторного нажатия педали акселератора транспортное средство может плавно начать движение, если ситуация вокруг транспортного средства не противоречит этому.
[0109] Если педаль акселератора нажата постоянно, то независимо от ситуации вокруг транспортного средства считается, что маневр, выполняемый водителем, не соответствует ситуации, и прекращение управления удержанием тормоза запрещается. Таким образом, снижается вероятность самопроизвольного начала движения транспортного средства.
Изменения
[0110] Например, как показано на ФИГ. 6, можно добавить этап S21 между этапами S12 и S14. На этапе S21 определяется присутствие или отсутствие водителя на водительском сиденье. Например, на этапе S21 ЭБУ 10 помощи при вождении считывает сигнал, указывающий на состояние переключателя ремня безопасности (не показанного на фигуре) на водительском сиденье, и определяет, находится ли водитель на водительском сиденье. В альтернативном варианте вместо переключателя ремня безопасности, ЭБУ 10 помощи при вождении может считывать сигнал с другого датчика, например, датчика сидения, который распознает нагрузку на сиденье и может определить, находится ли водитель на водительском сиденье.
[0111] Если ЭБУ 10 помощи при вождении определяет, что водитель находится на водительском сиденье, алгоритм переходит к этапу S14. Если ЭБУ 10 помощи при вождении определяет, что водитель отсутствует на водительском сиденье, алгоритм переходит к этапу S17.
[0112] Если водитель отсутствует на сиденье водителя, нажатие педали акселератора или тормоза не распознается. Соответственно, если перед транспортным средством нет препятствий, управление удержанием тормоза прекращается, когда время удержания достигает заданного значения. В соответствии с первой модификацией, даже в таком случае можно надежно запретить отмену управления удержанием тормоза.
[0113] ЭБУ 10 помощи при вождении может определить, был ли задействован какой-либо иной переключатель, предусмотренный для водительского сиденья, помимо переключателя ремня безопасности. В этом случае при обнаружении срабатывания любого другого переключателя ЭБУ 10 помощи при вождении может определить, что водитель находится на водительском сиденье.
[0114] Изобретение не ограничивается раскрытым выше вариантом осуществления устройства помощи при вождении; возможно внесение различных модификаций без отклонения от предмета изобретения.
[0115] Например, в вышеописанном варианте осуществления управление отменой удержания тормоза применяется к функции автоматического торможения, осуществляемой PCS-управлением. Тем не менее, автоматическое торможение, к которому применяется управление отменой удержания тормоза, не ограничивается PCS-управлением. Например, автоматическое торможение, к которому применяется управление отменой удержания тормоза, может использоваться системой помощи при вождении, которая применяет автоматическое торможение, если на основании информации о дорожной инфраструктуре, полученной передним датчиком (сигналы светофора и дорожные знаки) будет определено, что водитель не сможет остановить транспортное средство в заданном положении остановки (например, если водитель не увидел светофора), в котором он должен остановить транспортное средство в соответствии с законами и правилами. Информация о дорожной инфраструктуре не обязательно должна предоставляться датчиком 70 передней камеры. Например, информация о дорожной инфраструктуре, передаваемая по беспроводной связи с придорожного устройства и т.д., может быть получена с помощью устройства 51 беспроводной связи.
[0116] Автоматическое торможение, к которому применяется управление отменой удержания тормоза, может также применяться к системе подавления преждевременного начала движения, которая снижает вероятность внезапного начала движения транспортного средства, несмотря на намерения водителя, путем применения автоматического торможения при обнаружении нажатия неправильной педали (ошибочного нажатия водителем педали акселератора вместо тормоза).
[0117] Передний датчик может быть модифицирован при необходимости. Например, датчик 70 передней камеры может не иметь функции распознавания объектов транспортной инфраструктуры, в частности, сигналов светофора.
[0118] В вышеописанном варианте в качестве одного из условий определения на этапе S20 используется информация о дорожной инфраструктуре (например, сигнал светофора: красный). Тем не менее такая информация о дорожной инфраструктуре не обязательно должна включаться в условия определения на этапе S20. ЭБУ 10 помощи при вождении может определять наличие препятствия только на этапе S20.
[0119] В вышеописанном варианте осуществления при удержании транспортного средства в остановленном состоянии тормозной привод 21 активизируется для нагнетания давления масла в колесных цилиндрах фрикционных тормозных механизмов 22 правого и левого переднего и заднего колеса до уровня, обеспечивающего удержание транспортного средства в остановленном состоянии. Тем не менее, для удержания транспортного средства в остановленном состоянии можно использовать электрический стояночный тормоз (не показанный на фигуре).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОМОЩИ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ | 2020 |
|
RU2737180C1 |
| СИСТЕМА ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2694878C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И ИНТЕРФЕЙС УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2021 |
|
RU2754019C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И ИНТЕРФЕЙС УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2021 |
|
RU2754020C1 |
| УСТРОЙСТВО ПОМОЩИ ВОДИТЕЛЮ И СПОСОБ ПОМОЩИ ВОДИТЕЛЮ | 2020 |
|
RU2757092C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2753080C1 |
| АДАПТАЦИЯ И ОПРЕДЕЛЕНИЕ СТАРТА АВТОМОБИЛЯ | 2011 |
|
RU2573189C2 |
| ОПРЕДЕЛЕНИЕ СТАРТА АВТОМОБИЛЯ | 2011 |
|
RU2581609C2 |
| СПОСОБ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2020 |
|
RU2798793C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СИСТЕМА АВТОНОМНОГО ВОЖДЕНИЯ | 2021 |
|
RU2753081C1 |
Изобретение относится к устройству помощи при вождении, содержащему блоки: автоматического торможения, удержания тормоза, отмены удержания тормоза, получения информации об окружающей обстановке, получения информации о маневре, определения маневра, запрета. Блок автоматического торможения служит для автоматической остановки транспортного средства. Блок удержания тормоза служит для удержания транспортного средства в остановленном состоянии, остановленного блоком автоматического торможения. Блок отмены удержания тормоза служит для подачи на блок удержания тормоза команды на прекращение управления удержанием тормоза, если заданное условие прекращения выполняется во время управления удержанием тормоза, осуществляемого блоком удержания тормоза. Блок получения информации об окружающей обстановке служит для получения информации о ситуации вокруг транспортного средства. Блок получения информации о маневре служит для получения информации о маневре, выполняемом водителем транспортного средства. Блок определения маневра определяет соответствие маневра, выполняемого во время управления удержанием тормоза, ситуации вокруг транспортного средства на основании информации об окружающей обстановке и маневре. Блок запрета выполнен с возможностью запрета блоку отмены удержания тормоза подавать на блок удержания тормоза команду на прекращение управления удержанием тормоза до тех пор, пока блок определения маневра расценивает маневр как не соответствующий ситуации, даже если выполняется заданное условие прекращения. Достигается создание технического решения, в котором управление удержанием тормоза прекращается, если система определяет, что транспортное средство будет находиться в безопасности даже после прекращения управления удержанием тормоза. 9 з.п. ф-лы, 6 ил.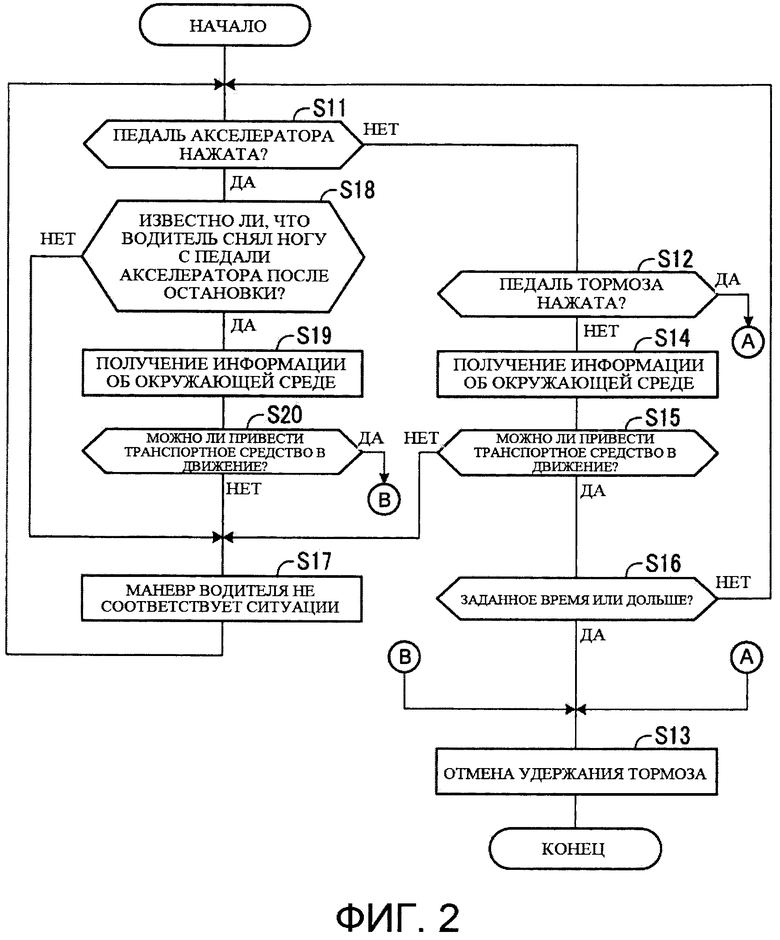
1. Устройство помощи при вождении, содержащее:
блок автоматического торможения, выполненный с возможностью управления автоматическим торможением, в частности, приложения к транспортному средству тормозного усилия для автоматической остановки транспортного средства, когда будет обнаружено выполнение заданного условия автоматической остановки транспортного средства;
блок удержания тормоза, выполненный с возможностью управления удержанием тормоза, в частности, приложения к транспортному средству тормозного усилия для удержания транспортного средства в остановленном состоянии, таким образом, чтобы воспрепятствовать движению транспортного средства, остановленного блоком автоматического торможения, в направлении вперед и назад;
блок отмены удержания тормоза, выполненный с возможностью подачи на блок удержания тормоза команды на прекращение управления удержанием тормоза, если заданное условие прекращения выполняется во время управления удержанием тормоза, осуществляемого блоком удержания тормоза;
блок получения информации об окружающей обстановке, выполненный с возможностью получения информации об окружающей обстановке, являющейся информацией о ситуации вокруг транспортного средства;
блок получения информации о маневре, выполненный с возможностью получения информации о маневре, выполняемом водителем транспортного средства;
блок определения маневра, выполненный с возможностью определения соответствия маневра, выполняемого во время управления удержанием тормоза, ситуации вокруг транспортного средства на основании полученной информации об окружающей обстановке и маневре; и
блок запрета, выполненный с возможностью запрета блоку отмены удержания тормоза подавать на блок удержания тормоза команду на прекращение управления удержанием тормоза до тех пор, пока блок определения маневра расценивает маневр как не соответствующий ситуации, даже если выполняется заданное условие прекращения.
2. Устройство помощи при вождении по п. 1, в котором
блок отмены удержания тормоза выполнен таким образом, чтобы заданное условие прекращения считалось выполненным, если время удержания тормоза равняется или превышает установленное пороговое время прекращения, а педаль акселератора не нажата, причем время удержания тормоза соответствует периоду, в течение которого управление удержанием тормоза выполняется непрерывно.
3. Устройство помощи при вождении по п. 2, в котором
блок отмены удержания тормоза выполнен с возможностью определения того, был ли выполнен определенный маневр, оцениваемый как предполагаемый водителем, во время управления удержанием тормоза, и, когда блок отмены удержания тормоза определяет выполнение определенного маневра, с возможностью определения того, что заданное условие прекращения выполняется даже тогда, когда время удержания тормоза меньше порогового времени прекращения.
4. Устройство помощи при вождении по п. 3, в котором
определенным маневром считается повторное нажатие педали акселератора, выполняемое во время управления удержанием тормоза.
5. Устройство помощи при вождении по п. 3, в котором
определенным маневром считается нажатие педали тормоза, выполняемое при нулевой степени нажатия педали акселератора во время управления удержанием тормоза.
6. Устройство помощи при вождении по любому из пп. 1-3, в котором
блок определения маневра выполнен с возможностью определения нецелесообразности маневра, если во время управления удержанием тормоза на основании полученной информации об окружающей обстановке будет обнаружено препятствие, с которым может столкнуться транспортное средство, и на основании полученной информации о маневре будет обнаружена нажатая педаль акселератора.
7. Устройство помощи при вождении по любому из пп. 1-3, в котором
блок определения маневра выполнен с возможностью определения нецелесообразности маневра, если во время управления удержанием тормоза на основании полученной информации об окружающей обстановке будет обнаружено препятствие, с которым может столкнуться транспортное средство, и на основании полученной информации о маневре будет обнаружено, что педаль тормоза не нажата.
8. Устройство помощи при вождении по любому из пп. 1-3, в котором
блок определения маневра выполнен с возможностью определения нецелесообразности маневра, если во время управления удержанием тормоза на основании полученной информации об окружающей обстановке будет распознана ситуация, в которой начало движения транспортного средства окажется противоправным, и на основании полученной информации о маневре будет обнаружена нажатая педаль акселератора.
9. Устройство помощи при вождении по любому из пп. 1-3, в котором
блок определения маневра выполнен с возможностью определения нецелесообразности маневра, если во время управления удержанием тормоза на основании полученной информации об окружающей обстановке будет распознана ситуация, в которой начало движения транспортного средства окажется противоправным, и на основании полученной информации о маневре будет обнаружено, что педаль тормоза не нажата.
10. Устройство помощи при вождении по любому из пп. 1-3, в котором
блок определения маневра выполнен с возможностью определения присутствия водителя на водительском сиденье во время управления удержанием тормоза, а также определения нецелесообразности маневра, если будет обнаружено отсутствие водителя на водительском сиденье.
| KR 20020093137 A, 12.12.2002 | |||
| МАГНИТНЫЙ РАЗЪЕМНЫЙ НЕГАТИВ | 1995 |
|
RU2093112C1 |
| WO 2017017764 A1, 02.02.2017 | |||
| WO 2017126226 A1, 27.07.2017 | |||
| DE 102014001202 A1, 21.08.2014. | |||

