Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу помощи при вождении и устройству помощи при вождении.
Уровень техники
[0002] Обычно в установленном на транспортном средстве устройстве помощи при вождении, которое может выполнять управление движением со следованием, побуждая транспортное средство-носитель двигаться автоматически, чтобы следовать за движущимся впереди транспортным средством, блок получения ограничения скорости получает ограничение скорости для участка дороги, по которому движется транспортное средство-носитель. Блок принятия решения о скорости уведомления принимает решение о скорости уведомления на основании упомянутого ограничения скорости. Блок уведомления выдает уведомление, если скорость движения транспортного средства-носителя достигла или превысила скорость уведомления. Известной формой блока принятия решения о скорости уведомления является устройство, которое устанавливает объявляемую скорость ниже, если выполняется управление движением со следованием, чем если управление движением со следованием не выполняется(например, см. патентный источник 1).
Источники из уровня техники
Патентные источники
[0003] Патентная источник 1: Опубликованная заявка на патент Японии № 2000-20898
Раскрытие изобретения
Проблема, решаемая изобретением
[0004] Обычные устройства выдают водителю оповещение, если скорость движения транспортного средства-носителя достигла скорости оповещения, основанной на ограничении скорости. Однако управлению с помощью при вождении для помощи водителю в операции управления присуща проблема, состоящая в том, что по мере усовершенствования помощи при вождении, которое повышает уровень помощи водителю в операциях управления, простое оповещение может быть неспособным стимулировать движение, которое основано на надлежащей помощи при вождении.
[0005] Настоящее изобретение направлено на решение этой проблемы, и его задача состоит в том, чтобы стимулировать движение, основанное на надлежащей помощи при вождении, путем снижения уровня помощи при вождении, если оценено, что существуют условия движения, требующие предупреждения водителя, в ситуации движения с удержанием полосы движения при повышенном уровне помощи при вождении.
Техническое решение
[0006] Для решения этой задачи настоящее изобретение относится к способу помощи при вождении, который имеет функцию управления скоростью/интервалом транспортного средства и функцию удержания полосы движения в качестве функций помощи при вождении для помощи водителю в операциях управления, и в котором используется контроллер переключения режимов для переключения режимов помощи в удержании полосы движения, которые помогают транспортному средству-носителю оставаться в полосе движения во время движения. Во время движения с удержанием полосы движения, в котором в качестве режима помощи в удержании полосы движения выбран режим без ручного управления, который позволяет водителю снять руки с рулевого колеса, оценивается, соответствует ли условие движения тому, что фактическая скорость транспортного средства для транспортного средства-носителя превышает ограничение скорости для участка дороги, по которому движется транспортное средство-носитель. Режим переключается с режима без ручного управления на режим с ручным управлением, при котором водитель держит руки на рулевом колесе, если оценивается, что выполняется условие движения, при котором фактическая скорость транспортного средства превышает ограничение скорости.
Эффект изобретения
[0007] Применение технического решения, описанного выше, позволяет стимулировать движение, основанное на надлежащей помощи при вождении, путем снижения уровня помощи при вождении, если оценено, что имеет место условие движения, требующее предупреждения водителя, в ситуации движения с удержанием полосы движения с повышенным уровнем помощи при вождении.
Краткое описание чертежей
[0008] Фиг.1 - общая схема системы, показывающая усовершенствованную систему помощи водителю, к которой применены способ помощи при вождении и устройство помощи при вождении согласно первому варианту осуществления.
Фиг.2 - схема, показывающая конфигурацию внутренней части транспортного средства при виде на ветровое стекло из положения сиденья водителя в транспортном средстве с помощью при вождении.
Фиг. 3 - увеличенный вид, показывающий управляемые водителем переключатели, предусмотренные на рулевом колесе транспортного средства с помощью при вождении.
Фиг.4 - блок-схема управления, показывающая конфигурацию контроллера переключения режимов блока управления ADAS.
Фиг.5 - блок-схема, показывающая последовательность операций процесса управления для переключения режимов помощи в удержании полосы движения, которая выполняется контроллером переключения режимов, предусмотренным в блоке управления ADAS.
Фиг.6 - схема, показывающая пример условия движения транспортного средства-носителя при выбранном режиме без ручного управления и пример отображения режима без ручного управления.
Фиг.7 - схема, показывающая пример условия движения транспортного средства-носителя при выбранном режиме с ручным управлением и пример отображения режима с ручным управлением.
Фиг.8 - это временная диаграмма, показывающая различные характеристики, когда режим помощи в удержании полосы движения переключается на режим с ручным управлением на основании изменения установленной скорости транспортного средства, вызванного операцией водителя.
Фиг.9 - временная диаграмма, показывающая различные характеристики, когда режим помощи в удержании полосы движения переключается в режим с ручным управлением на основании нажатия водителем педали акселератора.
Фиг.10 - временная диаграмма, показывающая различные характеристики, когда режим помощи в удержании полосы движения переключается в режим с ручным управлением на основании изменения ограничения скорости для участка дороги, по которой движется транспортное средство-носитель.
Осуществление изобретения
[0009] Ниже на основе первого варианта осуществления, показанного на чертежах, будет описан режим выполнения способа помощи при вождении и устройство помощи при вождении согласно настоящему изобретению.
Первый вариант осуществления
[0010] Способ помощи при вождении и устройство помощи при вождении в первом варианте осуществления применяются в транспортном средстве с помощью при вождении, в котором была установлена усовершенствованная система помощи водителю (ADAS), которая помогает водителю в операциях управления. Конфигурация по первому варианту осуществления будет разделена на «общую конфигурацию системы», «конфигурацию блока управления контроллера переключения режимов» и «конфигурацию процесса управления для переключения режима помощи в удержании полосы движения» для целей описания.
[0011] [Общая конфигурация системы]
На фиг.1 показана усовершенствованная система помощи водителю, в которой применяются способ помощи при вождении и устройство помощи при вождении по первому варианту осуществления. На фиг.2 показана конфигурация внутреннего пространства транспортного средства при виде на ветровое стекло из положения сиденья водителя в транспортном средстве с помощью при вождении. На Фиг. 3 показаны управляемые водителем переключатели, предусмотренные на рулевом колесе транспортного средства с помощью при вождении. Общая конфигурация системы будет описана ниже на основе Фиг. 1-3.
[0012] Усовершенствованная система помощи водителю (ADAS) представляет собой систему, которая имеет функцию управления скоростью/движением транспортного средства и функцию удержания полосы движения. Как показано на Фиг. 1, ADAS снабжена бортовыми датчиками 1, блоком 2 хранения картографических данных, внешним блоком 3 обмена данными, блоком 4 управления ADAS, исполнительным механизмом 5, устройством 6 HMI, навигационной системой 7, переключатели 8 управления и датчики 9 управляющей информации. “HMI” - это сокращение словосочетания «человеко-машинный интерфейс».
[0013] Бортовые датчики 1 имеют камеру 11, радар 12, GPS 13 и бортовой блок 14 обмена данными. Информация от датчиков, полученная бортовыми датчиками 1, выводится на блок управления 4 ADAS.
[0014] Камера 11 представляет собой датчик распознавания окружения транспортного средства-носителя, который выполняет функцию получения информации об окружении транспортного средства-носителя, такой как текущая полоса движения, соседние полосы движения, транспортные средства, окружающие транспортное средство-носитель, и пешеходы вокруг транспортного средства-носителя, из данных изображения. Камера 11 объединяет в себе переднюю камеру распознавания, заднюю камеру распознавания, правую камеру распознавания, левую камеру распознавания и т.п. и выполнена таким образом, чтобы иметь функцию отслеживания кругового обзора. Объекты на пути движения транспортного средства-носителя, полосы движения, объекты за пределами пути движения транспортного средства-носителя (конструкции на проезжей части, движущиеся впереди транспортные средства, движущиеся сзади транспортные средства, встречные транспортные средства, окружающие транспортные средства, пешеходы, велосипеды и мотоциклы), путь движения транспортного средства-носителя (разметка проезжей части, границы проезжей части, линии остановки и пешеходные переходы), дорожные знаки (ограничения скорости) и тому подобное, а также расстояния до объектов распознаются этой камерой 11.
[0015] Радар 12 является датчиком измерения расстояния, который выполняет функцию распознавания того, присутствуют ли объекты в окружении транспортного средства-носителя, и функцию распознавания расстояния до объекта в окружении транспортного средства-носителя. Здесь «радар 12» является общим понятием, которое включает в себя радар, использующий радиоволны; лидар, использующий оптическое излучение; и сонар, использующий ультразвуковые волны. Положения объектов на пути движения транспортного средства-носителя, объектов за пределами пути движения транспортного средства-носителя (конструкций на проезжей части, движущихся впереди транспортных средств, движущихся сзади транспортных средств, встречных транспортных средств, окружающих транспортных средств, пешеходов, велосипедов и мотоциклов) и тому подобного распознаются этим радаром 12.
[0016] GPS 13 имеет антенну GNSS и является датчиком положения транспортного средства-носителя, который распознаёт положение (широту и долготу) остановленного или движущегося транспортного средства-носителя посредством использования спутниковой связи. “GNSS” - это сокращенное словосочетание «глобальная навигационная спутниковая система», а “GPS” - это сокращенное словосочетание «глобальная система определения местоположения».
[0017] Бортовой блок 14 обмена данными представляет собой датчик внешних данных, с помощью которого информация, которая не может быть получена бортовыми датчиками 1 или из картографических данных, получается извне посредством беспроводной связи с внешним блоком 3 обмена данными через приемопередающие антенны 3а, 14а. Здесь, если «внешний блок 3 обмена данными» является, например, блоком обмена данными, установленным в другом транспортном средстве, движущемся рядом с транспортным средством-носителем, между транспортным средством-носителем и упомянутым другим транспортным средством может осуществляться связь между транспортными средствами, и информация, требуемая транспортным средством-носителем, может быть получена через запросы различной информации, содержащейся в упомянутом другом транспортном средстве. Кроме того того, если «внешний блок 3 обмена данными» является, например, блоком обмена данными, предусмотренным на объекте инфраструктуры, между транспортным средством-носителем и упомянутым объектом инфраструктуры может осуществляться связь с инфраструктурой, а информация, требуемая транспортным средством-носителем, может быть получена посредством запросов. Например, если в картографических данных, сохраненных в блоке 2 хранения картографических данных, отсутствует некоторая информация, или информация из картографических данных была изменена, отсутствующая или измененная информация может быть дополнена. Также можно получить информацию о дорожном движении, такую как информация о заторах движения на маршруте движения транспортного средства-носителя или информация о правилах движения.
[0018] Блок 2 хранения картографических данных выполнен из бортовой памяти, в которой хранятся так называемые электронные картографические данные, в которых связаны информация о широте/долготе и картографическая информация. Картографические данные, хранящиеся в блоке 2 хранения картографических данных, представляют собой картографические данные высокой точности с уровнем точности, который принципиально позволяет распознавать полосы движения, за исключением географических областей, для которых нет картографических данных высокой точности. Когда положение транспортного средства-носителя, определенное GPS 13, распознается блоком 4 управления ADAS, высокоточные картографические данные для заданного участка с центром в положении транспортного средства-носителя отправляются в блок 4 управления ADAS и навигационную систему 7.
[0019] Здесь «картографические данные высокой точности» содержат информацию о проезжей части, связанную с географическими точками, а информация о проезжей части определяется узлами и участками, которые соединяют узлы. Информация о проезжей части включает в себя информацию, которая определяет проезжую часть по положениям или областям проезжей части, и информацию о типах проезжей части для каждой проезжей части, ширине полос движения для каждой проезжей части и формах проезжей части. Информация о проезжей части сохраняется таким образом, что положения перекрестков, направления въезда на перекрестки, типы перекрестков и другая информация, относящаяся к перекресткам, связана с каждым набором идентификационной информации об участках проезжей части. Кроме того, информация о проезжей части сохраняется таким образом, что типы проезжей части, ширина полос движения, форма проезжей части, возможность или невозможность движения в прямом направлении, отношения приоритетности движения, возможен ли объезд (можно ли въезжать в соседние полосы движения), ограничения скорости, знаки и другая информация, относящаяся к проезжей части, связана с каждым набором идентификационной информации об участках проезжей части.
[0020] Блок 4 управления ADAS представляет собой блок, который объединяет управление помощью при вождении и имеет контроллер 41 помощи при ускорении/торможении, контроллер 42 источника приведения в движение и контроллер 43 тормоза в качестве контроллеров, которые совместно выполняют функцию управления скоростью/интервалом транспортного средства. ↓ Блок 4 управления ADAS также имеет контроллер 44 помощи в управлении рулевым колесом и контроллер 45 рулевого управления в качестве контроллеров, которые совместно выполняют функцию удержания полосы движения. Кроме того, в случае усовершенствованной системы помощи водителю (ADAS) блок 4 управления ADAS имеет контроллер 46 HMI в качестве контроллера, который совместно выполняет функцию обеспечения связи между водителем и системой. Кроме того, в случае усовершенствованной системы помощи водителю (ADAS) блок 4 управления ADAS имеет контроллер 47 переключения режимов, который управляет переключением режимов помощи в удержании полосы движения вместе с повышением уровня помощи при вождении до «режима M1 без ручного управления», который позволяет водителю снять руки с рулевого колеса.
[0021] Контроллер 41 помощи при ускорении/торможении выполняет следующее управление для помощи водителю в управлении акселератором и управлении тормозом.
(a) Если обнаружено движущееся впереди транспортное средство, управление интервалом осуществляется таким образом, чтобы скорость транспортного средства, установленная водителем, принималась в качестве верхнего предела, и сохранялось расстояние интервала, соответствующее упомянутой скорости транспортного средства.
(b) Если движущееся впереди транспортное средство не обнаружено, транспортное средство равномерно движется с установленной скоростью транспортного средства.
(c) Если движущееся впереди транспортное средство остановилось, транспортное средство-носитель также останавливается за движущимся впереди транспортным средством.
(d) Если движущееся впереди транспортное средство начало движение, остановленное состояние прекращается, и возобновляется движение со следованием, если нажат переключатель 82 возобновления/ускорения (см. фиг. 3) или нажата педаль акселератора.
(e) Если транспортное средство-носитель остановилось под действием функции управления скоростью/интервалом транспортного средства, по команде на исполнительный механизм 53 электрического стояночного тормоза приводится в действие электрический стояночный тормоз , если выполняется операция разблокировки системы.
[0022] В дополнение к управлению скоростью/интервалом транспортного средства на основании вышеуказанных пунктов (а) - (е), обычно известному как «круиз-контроль», контроллер 41 помощи при ускорении/торможении выполняет управление, описанное ниже.
(f) Если транспортное средство-носитель движется под управлением функции управления скоростью/интервалом транспортного средства, разрешается изменение (увеличение или уменьшение) установленной скорости транспортного средства посредством управления переключателями со стороны водителя.
(g) Если функцией распознавания знака ограничения скорости обнаружено новое ограничение скорости, дисплей помощи по ограничениям скорости мигает, на дисплее отображается «установленная скорость транспортного средства изменена», и установленная скорость транспортного средства приводится к значению, отражающему обнаруженное ограничение скорости. Однако ограничение скорости не отражается на установленной скорости в тех случаях, когда установленная скорость транспортного средства установлена на скорость выше, чем ограничение скорости, посредством управления переключателями со стороны водителя, и затем установленная скорость транспортного средства не была превышена, даже если ограничение скорости увеличилось (помощь по ограничению скорости).
(h) Если транспортное средство-носитель движется под управлением функции управления скоростью/интервалом транспортного средства, ускорение разрешается, если педаль акселератора нажата, когда водитель желает временно ускориться. Управление тормозом, предупреждения о приближении и предупреждения о повороте не выдаются, когда приводится в действие педаль акселератора и происходит ускорение. Если педаль акселератора отпущена, восстанавливается прежнее управление скоростью/интервалом транспортного средства.
(i) Если транспортное средство-носитель движется под управлением функции управления скоростью/интервалом транспортного средства, замедление разрешается, если педаль тормоза нажата, когда водитель желает временно замедлить движение. Если водитель желает вернуться к установленной скорости транспортного средства, которая действовала до замедления, нажимается переключатель 82 возобновления/ускорения (см. Фиг. 3).
(j) При движении по криволинейной дороге управление скоростью транспортного средства осуществляется таким образом, чтобы транспортное средство могло двигаться со скоростью транспортного средства, соответствующей размеру изгибов дороги впереди, на основании картографической информации.
[0023] Если целевая скорость транспортного средства формируется контроллером 41 помощи при ускорении/торможении, контроллер 42 источника приведения в движение выполняет продольное управление, при котором значение команды приведения в движение вычисляется и выводится на исполнительный механизм 51 привода таким образом, чтобы фактическая скорость транспортного средства для транспортного средства-носителя достигла целевой скорости транспортного средства.
[0024] Если целевое замедление торможения формируется контроллером 41 помощи при ускорении/торможении, контроллер 43 тормоза выполняет продольное управление, при котором значение команды торможения вычисляется и выводится на исполнительный механизм 52 тормоза таким образом, чтобы фактическое замедление торможения транспортного средства-носителя достигло целевого замедления торможения.
[0025] Контроллер 44 помощи в управлении рулевым колесом выполняет функцию удержания полосы движения, при которой выполняется управление рулевым управлением (поперечное управление) и поддерживается операция рулевого управления со стороны водителя таким образом, чтобы транспортное средство-носитель двигалось по центральной части полосы движения на основании обнаружения разметки полосы движения по обеим сторонам полосы движения передней камерой распознавания.
[0026] Если целевой угол рулевого управления формируется контроллером 44 помощи в управлении рулевым колесом для того, чтобы транспортное средство-носитель двигалось по центральной части полосы движения, контроллер 45 рулевого управления выполняет поперечное управление, при котором значение команды угла рулевого управления вычисляется и выводится в исполнительный механизм 54 угла рулевого управления таким образом, чтобы фактический угол рулевого управления транспортного средства-носителя достиг целевого угла рулевого управления.
[0027] Контроллер 46 HMI формирует команду отображения для проекционного дисплея 61 и дисплея 62 приборной панели таким образом, чтобы рабочие состояния функции управления скоростью/интервалом транспортного средства и функции удержания полосы движения, и изменения в этих рабочих состояниях могли быть визуально распознаваемыми. Например, когда должны отображаться «режим без ручного управления» и «режим с ручным управлением», используется отображение, в котором режимы различаются по цвету, отображение пиктограмм или отображение сообщений таким образом, чтобы водитель мог с первого взгляда установить рабочее состояние. Кроме того, формируется звуковой сигнал для громкоговорителя 63, если становится необходимым объявление для водителя, направленное на слуховое восприятие, и формируется команда активации/остановки для блока 64 оповещения, если становится необходимым предупреждение для водителя, направленное на слуховое восприятие.
[0028] Здесь проекционный дисплей 61 устройства 6 HMI установлен в нижнем положении на ветровом стекле 21, как показано на Фиг. 2, и проекционный дисплей 61 отображает состояния системы и тому подобное на ветровом стекле с использованием осветительного устройства. Дисплей 62 приборной панели установлен в блоке отображения приборов приборной панели 22 и отображает рабочие состояния системы, состояния ближайших транспортных средств и тому подобное. Громкоговоритель 63 и блок 64 оповещения установлены в заданных положениях на внутренней стороне панели 22 приборов.
[0029] Во время движения с удержанием полосы движения, в котором выбран режим без ручного управления, контроллер 47 переключения режимов оценивает, выполнено ли условие движения, при котором фактическая скорость транспортного средства для транспортного средства-носителя превышает ограничение скорости для проезжей части, по которой движется транспортное средство-носитель. Осуществляется управление, при котором режим переключается из режима без ручного управления на режим с ручным управлением, если оценено, что выполнено условие движения, при котором фактическая скорость транспортного средства превышает ограничение скорости.
[0030] Здесь «режим без ручного управления» означает режим помощи в удержании полосы движения, который позволяет водителю снять руки с рулевого колеса 23. «Режим с ручным управлением» означает режим помощи в удержании полосы движения, условием которого является то, что водитель держит руки на рулевом колесе 23. То есть, «режим без ручного управления» и «режим с ручным управлением» представляют собой режимы, которые отличаются только тем, что водителю позволено снять руки с рулевого колеса 23, или он должен держать руки на рулевом колесе 23, а не режимы, при которых изменяется фактическое управление помощью при вождении. Таким образом, если выбран «режим без ручного управления», транспортное средство может двигаться в состоянии автономного управления, при этом водитель полностью не участвует в операциях управления. Если выбран «режим с ручным управлением», что снижает уровень помощи при вождении по сравнению с «режимом без ручного управления», транспортное средство движется в состоянии, в котором водитель готов к переходу к управлению рулевым колесом, даже если водитель не участвует непосредственно в управлении рулевым колесом.
[0031] Навигационная система 7 представляет собой систему, которая объединяет картографические данные, хранящиеся в блоке 2 хранения картографических данных, с GPS 13, который использует спутниковую связь, и, если установлен пункт назначения, формирует маршрут движения от текущего положения транспортного средства-носителя до пункта назначения, и направляет транспортное средство-носитель в пункт назначения. Когда маршрут движения сформирован, отображение карты проезжей части отображается на навигационном дисплее 71 вместе с маршрутом движения и пиктограммой транспортного средства-носителя. Навигационный дисплей 71 расположен в верхнем центральном положении на панели 22 приборов, как показано на Фиг. 2, и имеет функцию для установки пункта назначения посредством, среди прочего, операций водителя с сенсорным экраном.
[0032] Как показано на фиг. 2, переключатели 8 управления установлены в положение на панели рулевого управления, которая соединяет обод рулевого колеса и вал рулевого колеса у рулевого колеса 23, где ими можно управлять пальцами, и при этом водитель также держит обод рулевого колеса. Переключатели 8 управления имеют главный переключатель 81, переключатель 82 возобновления/ускорения, переключатель 83 установки/движения накатом, переключатель 84 отмены, переключатель 85 регулировки интервала и переключатель 86 помощи при смене полосы движения. Главный переключатель 81 представляет собой выключатель для включения или выключения системы. Переключатель 82 возобновления/ускорения имеет функцию повторной активации после деактивации установленной скорости транспортного средства, которая действовала до деактивации, функцию повышения установленной скорости транспортного средства и функцию возобновления движения после остановки транспортного средства-носителя таким образом, чтобы следовать за движущимся впереди транспортным средством. Переключатель 83 установки/движения накатом имеет функцию активации при скорости движущегося транспортного средства и функцию снижения установленной скорости транспортного средства. Переключатель 84 отмены является переключателем, который отменяет активацию. Переключатель 85 регулировки интервала представляет собой переключатель, который осуществляет переключение между установленными настройками интервала. Переключатель 86 помощи при смене полосы движения представляет собой переключатель, который выдает команду на начало смены полосы движения, если система получила от водителя подтверждение начала смены полосы движения.
[0033] Здесь, после нажатия главного переключателя 81, если транспортное средство ускоряется или замедляется до желаемой установленной скорости транспортного средства и нажат переключатель 83 установки/движения накатом, ограничение скорости для проезжей части, по которой осуществляется движение, используется в качестве установленной скорости транспортного средства, и активируется управление помощью при вождении посредством блока 4 управления ADAS. Если для проезжей части, по которой осуществляется движение, не было обнаружено ограничение скорости, или если помощь в ограничении скорости была отключена, скорость при нажатии переключателя 83 установки/движения накатом будет использоваться в качестве установленной скорости транспортного средства, а управление помощью при вождении блоком 4 управления ADAS будет активировано.
[0034] Управление помощью при вождении блоком 4 управления ADAS деактивируется при нажатии переключателя 84 отмены, при нажатии главного переключателя 81 или при нажатии педали тормоза (если транспортное средство-носитель не было остановлено функцией управления скоростью/интервалом транспортного средства).
[0035] Датчики 9 управляющей информации получают информацию, необходимую для выполнения управления помощью при вождении блоком 4 управления ADAS. Как показано на Фиг.2, датчики 9 управляющей информации имеют камеру 91 отслеживания водителя, датчик 92 касания, датчик 94 сиденья и переключатель 95 пряжки ремня безопасности. Кроме того, как показано на Фиг.1, датчики управляющей информации имеют датчик 93 крутящего момента, датчик 96 скорости транспортного средства и датчик 97 положения акселератора.
[0036] Камера 91 отслеживания водителя установлена таким образом, что объектив камеры обращен к водителю, и отслеживает взгляд водителя вперёд (ориентацию лица и то, открыты или закрыты его глаза). Датчик 92 прикосновения (емкостной датчик) установлен на ободе рулевого колеса 23, то есть там, куда водитель кладет руки, и определяет, держит ли водитель руки на рулевом колесе 23. Датчик 93 крутящего момента установлен в блоке передачи усилия рулевого управления механизма рулевого управления и определяет, добавляет ли водитель крутящий момент рулевого управления для управления рулевым колесом. Датчик 94 сиденья (датчик веса) установлен в подушке 24 сиденья в сиденье водителя и определяет, сидит ли водитель. Переключатель 95 пряжки ремня безопасности определяет, застёгнут ли ремень безопасности. Датчик 96 скорости транспортного средства определяет фактическую скорость транспортного средства для транспортного средства-носителя. Датчик 97 положения акселератора обнаруживает нажатие педали акселератора, когда водитель выполняет управление акселератором.
[0037] [Конфигурация блока управления контроллера переключения режимов]
Конфигурация блока управления контроллера 47 переключения режимов описана ниже на основе Фиг. 4, на которой показан контроллер 47 переключения режимов блока 4 управления ADAS.
[0038] Как показано на Фиг. 4, контроллер 47 переключения режимов имеет «режим M1 без ручного управления» и «режим M2 с ручным управлением» в качестве режимов помощи в удержании полосы движения и снабжен блоком 471 оценки условий движения и блоком 472 переключения режимов. Контроллер 47 переключения режимов дополнительно снабжен блоком 473 оценки условий переключения и блоком 474 переключения режимов.
[0039] Во время движения с удержанием полосы движения, в котором был выбран «режим M1 без ручного управления», блок 471 оценки условий движения оценивает, выполнено ли условие движения, при котором фактическая скорость транспортного средства-носителя превышает ограничение скорости для проезжей части, по которой движется транспортное средство-носитель.
[0040] Если оценено, что условие движения, при котором фактическая скорость транспортного средства превышает упомянутое ограничение скорости, выполнено, блок 472 переключения режимов переключает режим помощи в удержании полосы движения с «режима M1 без ручного управления» на «режим М2 с ручным управлением».
[0041] Если выбран «режим M2 с ручным управлением», блок 473 оценки условий переключения определяет, выполнены ли условия для переключения из «режима M2 с ручным управлением» в «режим M1 без ручного управления». Здесь в качестве условий для переключения из «режима M2 с ручным управлением» в «режим M1 без ручного управления» применяется множество условий, например, «транспортное средство движется со скоростью транспортного средства, равной или меньшей, чем ограничение скорости», «водитель держит рулевое колесо 23» и «педаль акселератора не нажата».
[0042] Если условия для переключения из «режима M2 с ручным управлением» в «режим M1 без ручного управления» выполнены, блок 474 переключения режимов переключает режим помощи в удержании полосы движения с «режима M2 с ручным управлением» на «режим M1 без ручного управления». Если множество условий переключения, упомянутых выше выполняются одновременно, условия переключения считаются выполненными.
[0043] Функция управления скоростью/интервалом транспортного средства контроллера 41 помощи при ускорении/торможении включает в себя функцию, позволяющую изменять установленную скорость транспортного средства, используемую при управлении скоростью/интервалом транспортного средства, посредством управления со стороны водителя. В связи с этой функцией изменения установленной скорости транспортного средства блок 471 оценки условий движения имеет блок 471a определения изменения установленной скорости транспортного средства, а блок 472 переключения режимов имеет первый блок 472a переключения режимов, как показано на Фиг. 4.
[0044] Во время движения с удержанием полосы движения, при котором был выбран «режим M1 без ручного управления», блок 471a определения изменения установленной скорости транспортного средства определяет, выполнил ли водитель операцию для увеличения установленной скорости транспортного средства выше ограничения скорости.
[0045] Если определено, что водитель выполнил операцию для увеличения установленной скорости транспортного средства, и определено, что фактическая скорость транспортного средства равна или больше оцененного значения скорости транспортного средства (ограничение скорости+α), первый блок 472a переключения режимов переключается из «режима M1 без ручного управления» в «режим M2 с ручным управлением».
[0046] Функция управления скоростью/интервалом транспортного средства контроллера 41 помощи при ускорении/торможении включает в себя функцию для разрешения ускорения посредством операции нажатия на педаль акселератора водителем. В связи с этой функцией разрешения ускорения блок 471 оценки условий движения имеет блок 471b определения управления акселератором, а блок 472 переключения режимов имеет второй блок 472b переключения режимов, как показано на Фиг.4.
[0047] Блок 471b определения управления акселератором определяет, выполнил ли водитель операцию нажатия педали акселератора при движении с удержанием полосы движения, в котором был выбран «режим M1 без ручного управления». Если определено, что водитель выполнил операцию нажатия педали акселератора, водителя просят удерживать рулевое колесо. Даже если определено, что водитель выполнил операцию нажатия педали акселератора, ускорение транспортного средства-носителя в ответ на операцию нажатия педали акселератора откладывается, не выполняясь.
[0048] Если подтверждено, что водитель держит рулевое колесо 23, второй блок 472b переключения режимов переключается из «режима M1 без ручного управления» в «режим M2 с ручным управлением». Ускорение транспортного средства-носителя в ответ на нажатие водителем на педаль акселератора начинается после того, как режим был переключен на «режим M2 с ручным управлением».
[0049] Функция управления скоростью/интервалом транспортного средства контроллера 41 помощи при ускорении/торможении включает в себя функцию для перезаписи установленной скорости транспортного средства, используемой для управления скоростью/интервалом транспортного средства, на обнаруженное ограничение скорости, если обнаружено ограничение скорости для проезжей части, по которой движется транспортное средство-носитель. В связи с этой функцией перезаписи установленной скорости транспортного средства блок 471 оценки условий движения имеет блок 471c определения ограничения скорости, а блок 472 переключения режимов имеет третий блок 472c переключения режимов, как показано на Фиг.4.
[0050] Блок 471c определения ограничения скорости определяет, уменьшилось ли вновь обнаруженное ограничение скорости по сравнению с предыдущим ограничением скорости во время движения с удержанием полосы движения, при котором был выбран «режим M1 без ручного управления».
[0051] По истечении установленного времени с того момента, когда было определено, что ограничение скорости уменьшилось, третий блок 472c переключения режимов определяет, превысила ли фактическая скорость транспортного средства ограничение скорости. Если определено, что фактическая скорость транспортного средства превысила ограничение скорости, режим переключается с «режима M1 без ручного управления» на «режим M2 с ручным управлением».
[0052] [Конфигурация процесса управления для переключения режима помощи в удержании полосы движения]
Ниже пошаговая конфигурация процесса управления для пошагового переключения режима помощи в удержании полосы движения будет пошагово пояснена на основе Фиг.5, на которой показана последовательность операций процесса управления для переключения режимов помощи в удержании полосы движения, который выполняется контроллером 47 переключения режимов, предусмотренным в блоке 4 управления ADAS. Этот процесс начинается при включении главного переключателя 81 и заканчивается, когда управление помощью при вождении деактивируется.
[0053] На этапе S1 выполняется определение того, был ли нажат переключатель 83 установки/движения накатом после того, как процесс был запущен нажатием главного переключателя 81. В случае «ДА» (нажат переключатель установки/движения накатом) процесс переходит к этапу S2, а в случае «НЕТ» (переключатель установки/движения накатом не нажат) определение, выполняемое на этапе S1, повторяется.
[0054] На этапе S2, после определения на S1, что нажат переключатель установки/движения накатом, или определения НЕТ на S4, S19 или S21, выполняется определение того, не было ли обнаружено ограничение скорости для проезжей части, по которой осуществляется движение, или помощь при ограничении скорости была отключена. В случае ДА (ограничение скорости не было обнаружено, или тому подобное) процесс переходит к этапу S3, а в случае НЕТ (обнаружено ограничение скорости, или тому подобное) процесс переходит к этапу S5.
[0055] То есть, если было обнаружено ограничение скорости для проезжей части, по которой осуществляется движение, и была включена помощь при ограничении скорости, помощь при ограничении скорости использует упомянутое ограничение скорости в качестве установленной скорости транспортного средства, а управление помощью при вождении посредством блока 4 управления ADAS активируется выбором «режима M2 с ручным управлением». Если ограничение скорости для проезжей части, по которой осуществляется движение, не было обнаружено или если помощь при ограничении скорости была отключена, в качестве установленной скорости транспортного средства используется скорость при нажатии переключателя 83 установки/движения накатом. Затем управление помощью при вождении посредством блока 4 управления ADAS активируется выбором «режима M2 с ручным управлением».
[0056] На этапе S3, после определения на этапе S2, что ограничение скорости не было обнаружено, или тому подобного, «режим M2 с ручным управлением» выбирается в качестве режима помощи в удержании полосы движения, и процесс переходит к этапу S4.
[0057] На этапе S4, после выбора «режима M2 с ручным управлением» на S3, определения НЕТ на S6 или S7, S12, S18 или S24, выполняется определение того, выполнены ли условия для деактивации управления помощью при вождении посредством блока 4 управления ADAS. В случае ДА (условия деактивации выполнены) процесс переходит к завершению, а в случае НЕТ (условия деактивации не выполнены) процесс возвращается к этапу S2.
[0058] Здесь определяется, что условия деактивации выполнены, если была обнаружена любая из следующих операций: (a) нажатие переключателя 84 отмены, (b) нажатие главного переключателя 81 или (c) нажатие педали тормоза (если транспортное средство не остановилось под действием функции управления скоростью/интервалом транспортного средства).
[0059] На этапе S5, после определения на этапе S2, что ограничение скорости было обнаружено, или тому подобного, выполняется определение того, был ли выбран «режим M2 с ручным управлением». В случае ДА (выбран «режим M2 с ручным управлением») процесс переходит к этапу S6, а в случае НЕТ (выбран «режим M1 без ручного управления») процесс переходит к этапу S8.
[0060] На этапе S6, после определения на S5, что был выбран «режим M2 с ручным управлением», выполняется определение того, выполнены ли условия отмены ручного управления для переключения с «режима M2 с ручным управлением» на «режим M1 без ручного управления». В случае ДА (условия отмены ручного управления выполнены) процесс переходит к этапу S7, а в случае НЕТ (условия отмены ручного управления не выполнены) процесс переходит к этапу S4.
[0061] На этапе S7, после определения на S6, что условия отмены ручного управления выполнены, режим переключается с «режима M2 с ручным управлением» на «режим M1 без ручного управления», и процесс переходит к этапу S4.
[0062] На этапе S8, после определения на S5, что был выбран «режим M1 без ручного управления», выполняется определение того, превышает ли установленная скорость транспортного средства обнаруженное ограничение скорости. В случае ДА (установленная скорость транспортного средства > ограничения скорости) процесс переходит к этапу S9, а в случае НЕТ (установленная скорость транспортного средства ≤ ограничения скорости) процесс переходит к этапу S14.
[0063] На этапе S9, после определения на S8, что установленная скорость транспортного средства > ограничения скорости, выполняется определение того, выполнил ли водитель операцию увеличения установленной скорости транспортного средства. В случае ДА (была выполнена операция увеличения установленной скорости транспортного средства) процесс переходит к этапу S10, а в случае НЕТ (операция увеличения установленной скорости транспортного средства не выполнялась) процесс переходит к этапу S12.
[0064] На этапе S10, после определения на S9, что была выполнена операция увеличения установленной скорости транспортного средства, выполняется определение того, повысилась ли фактическая скорость транспортного средства по меньшей мере до оцененного значения скорости транспортного средства, которое является ограничением скорости с добавлением допуска на ошибку α. В случае ДА (фактическая скорость транспортного средства ≥ оцененного значения скорости транспортного средства) процесс переходит к этапу S11, а в случае НЕТ (фактическая скорость транспортного средства < оцененного значения скорости транспортного средства) процесс переходит к этапу S4. Если установленная скорость транспортного средства должна быть увеличена, установленная скорость транспортного средства увеличивается на заданную скорость транспортного средства (например, 5 км/ч), если выполняется операция с переключателем со стороны водителя путём однократного нажатия.
[0065] На этапе S11, после определения на S10, что фактическая скорость транспортного средства ≥ оцененного значения скорости транспортного средства, или определения на S13 того, что разность скоростей транспортного средства > порогового значения скорости транспортного средства, режим переключается с «режима M1 без ручного управления» на «режим M2 с ручным управлением», и процесс переходит к этапу S4.
[0066] На этапе S12, после определения на S9, что не выполнялась какая-либо операция для увеличения установленной скорости транспортного средства, выполняется определение, было ли вновь обнаружено ограничение скорости для проезжей части, по которой движется транспортное средство-носитель, и истекло ли установленное время с момента уменьшения вновь обнаруженного ограничения скорости. В случае ДА (с момента уменьшения ограничения скорости истекло установленное время ) процесс переходит к этапу S21, а в случае НЕТ (с момента уменьшения ограничения скорости не истекло установленное время) определение этапа S20 повторяется. Здесь, если помощь при ограничении скорости перезаписывает установленную скорость транспортного средства в связи с уменьшением ограничения скорости, «установленное время» определяется на основании необходимого времени, требуемого с момента перезаписи установленной скорости транспортного средства, для достижения сходимости фактической скорости транспортного средства с установленной скоростью транспортного средства после перезаписи.
[0067] На этапе S13, после определения на S12, что установленное время истекло с момента уменьшения ограничения скорости, выполняется определение того, превысила ли разность скорости транспортного средства, найденная путем вычитания ограничения скорости из фактической скорости транспортного средства, пороговое значение скорости транспортного средства, которое указывает, что скорость транспортного средства сошлась. В случае ДА (разность скорости транспортного средства > порогового значения скорости транспортного средства) процесс переходит к этапу S11, а в случае НЕТ (разность скорости транспортного средства ≤ порогового значения скорости транспортного средства) процесс переходит к этапу S4.
[0068] На этапе S14, после определения на S8, что установленная скорость транспортного средства ≤ ограничения скорости, выполняется определение того, была ли выполнена водителем операция нажатия педали акселератора. В случае ДА (операция нажатия педали акселератора была выполнена) процесс переходит к этапу S15, а в случае НЕТ (операция нажатия педали акселератора не была выполнена) процесс переходит к этапу S4.
[0069] На этапе S15, после определения на S14, что операция нажатия педали акселератора была выполнена, выполняется определение того, снял ли водитель руки с рулевого колеса 23. В случае ДА (руки сняты с рулевого колеса 23) процесс переходит к этапу S16, а в случае НЕТ (руки находятся на рулевом колесе 23) процесс переходит к этапу S20.
[0070] На этапе S16, после определения на S15, что руки сняты с рулевого колеса 23, водитель уведомляется посредством отображения, объявления или тому подобного о необходимости положить руки на рулевое колесо 23, и процесс переходит к этапу S16.
[0071] На этапе S17, после уведомления водителя на этапе S16, выполняется определение того, положил ли водитель руки на рулевое колесо 23. В случае ДА (руки находятся на рулевом колесе 23) процесс переходит к этапу S18, а в случае НЕТ (руки сняты с рулевого колеса 23) процесс переходит к этапу S4.
[0072] На этапе S18, после определения на этапе S15, что руки находятся на рулевом колесе 23, или определения на этапе S17, что руки находятся на рулевом колесе 23, режим переключается с «режима M1 без ручного управления» на «режим M2 с ручным управлением», и процесс переходит к этапу S19.
[0073] На этапе S19, после переключения в «режим M2 с ручным управлением» на S18, начинается ускорение в ответ на операцию нажатия педали акселератора со стороны водителя, и процесс переходит к этапу S4. То есть, даже если на этапе S14 обнаруживается операция нажатия на педаль акселератора со стороны водителя, фактическое ускорение транспортного средства-носителя откладывается до тех пор, пока режим не переключен на «режим M2 с ручным управлением».
[0074] Далее будут пояснены технология из уровня техники и средства для решения упомянутой проблемы. Работа первого варианта осуществления будет разделена для целей описания на «работу процесса управления для переключения режимов помощи в удержании полосы движения» и «операцию управления переключением режимов для каждого условия движения, при котором превышено ограничение скорости».
[0075] Известно транспортное средство с системой помощи при вождении, которое имеет функцию управления скоростью/интервалом транспортного средства и функцию удержания полосы движения в качестве функций помощи при вождении для помощи водителю в операциях управления транспортным средством, в котором имеется условие, что водитель держит руки на рулевом колесе, и которое выполняет движение с удержанием полосы движения, оставаясь в пределах одной полосы движения.
[0076] Это транспортное средство с помощью при вождении имеет условие того, что водитель держит руки на рулевом колесе, но существует потребность в дальнейшем повышении уровня помощи при вождении и обеспечении возможности обеспечении помощи при вождении, при которой не имеется условие того, что водитель держит руки на рулевом колесе.
[0077] Однако, чтобы повысить уровень помощи при вождении и установить помощь при вождении, при которой не имеется условие того, что водитель держит руки на рулевом колесе, становится необходимым требование того, чтобы было предусмотрено, чтобы водитель держал руки на рулевом колесе, а помощь при вождении отменялась в условиях движения, в которых возможно, что функция удержания полосы движения не будет поддерживаться. Это требование отсутствует в обычной системе помощи при вождении, в которой всегда возможна отмена помощи при вождении, и в которой предполагается, что водитель всегда держит руки на рулевом колесе.
[0078] В отличие от этого, в технологии, описанной в патентном источнике 1, только передается информация от системы к водителю через уведомление с использованием отображений или объявлений. Таким образом, возникла проблема, состоящая в том, что, если уровень помощи при вождении повышен и разработаны транспортные средства с помощью при вождении, для которых отсутствует условие того, чтобы руки находились на рулевом колесе, может оказаться невозможным побудить водителя к выполнению надлежащих действий путем одной лишь передачи информации от системы водителю посредством уведомлений.
[0079] Для решения этой проблему, авторы настоящего изобретения и другие специалисты сосредоточили внимание на том факте, что, помимо обеспечения простых уведомлений, необходимо оповестить водителя, чтобы водитель получал информацию, передаваемую из системы, и реагировал на эту информацию.
[0080] В способе помощи при вождении согласно настоящему изобретению, на основе этой точки сосредоточения, в режиме помощи в удержании полосы движения оценивается, выполнено ли условие движения, состоящее в том, что фактическая скорость транспортного средства для транспортного средства-носителя превышает ограничение скорости для проезжей части, по которой движется транспортное средство-носитель, при движении с удержанием полосы движения, в котором был выбран режим без ручного управления, который позволяет водителю снять руки с рулевого колеса 23. Было использовано решение, в котором режим переключается с «режима M1 без ручного управления» в «режим M2 с ручным управлением», при котором имеется условие того, что водитель держит руки на рулевом колесе 23, если оценено, что соблюдено условие движения, при котором фактическая скорость транспортного средства превышает упомянутое ограничение скорости.
[0081] Например, во время движения с удержанием полосы движения, обеспечиваемого при выборе «режима M1 без ручного управления», если водитель увеличивает установленную скорость транспортного средства, если водитель выполняет операцию нажатия педали акселератора, если ограничение скорости для проезжей части, по которой осуществляется движение, снижается или тому подобное, фактическая скорость транспортного средства в конечном итоге превысит ограничение скорости. Когда это происходит, если выдаётся лишь уведомление, направленное на зрительное восприятие или слуховое восприятие, водитель может по-прежнему не положить руки на рулевое колесо 23, и существует риск того, что оповещение водителя будет недостаточным, и что немедленные операции с рулевым колесом также будут задержаны. В частности, в случаях, когда изменяется ограничение скорости, даже более вероятно, что водитель по-прежнему не положит руки на рулевое колесо 23, чем в случаях, основанных на операциях со стороны водителя.
[0082] Чтобы учесть это, режим переключается с «режима M1 без ручного управления» на «режим M2 с ручным управлением», для которого имеется условие, что водитель держит руки на рулевом колесе 23, если оценено, что выполнено условие движения, при котором фактическая скорость транспортного средства превышает ограничение скорости. То есть в ситуациях движения, в которых фактическая скорость транспортного средства превышает ограничение скорости, если водитель снимает руки с рулевого колеса 23, режим переключается на «режим M2 с ручным управлением», в котором водителя побуждают положить руки на рулевое колесо 23. Таким образом, выполняется переключение в режим, который направлен на тактильное восприятие водителем, и можно гарантировать, что водитель будет надежно оповещён о том, что фактическая скорость транспортного средства превышает ограничение скорости. Кроме того, немедленные операции с рулевым колесом также могут быть выполнены водителем, руки которого находятся на рулевом колесе 23.
[0083] Таким образом, в ситуации движения в «режиме M1 без ручного управления», в котором уровень помощи водителю повышен, если оценено, что имеют место условия движения, которые требуют оповещения водителя, уровень помощи при вождении снижается до «режима M2 с ручным управлением», в котором водителя побуждают положить руки на рулевое колесо 23. Другими словами, использование переключения в «режим M2 с ручным управлением», в котором уровень помощи при вождении снижен, в качестве дополнительной меры противодействия позволяет установить систему помощи при вождении, в которой можно выбрать «режим M1 без ручного управления», в котором уровень помощи при вождении повышен. Затем, разрешение выбора «режима M1 без ручного управления», который обеспечивает возможность движения без ручного управления, аналогично автономному управлению, позволяет стимулировать движение, при котором используется надлежащая помощь при вождении при повышенном уровне помощи при вождении.
[0084] Здесь, в случаях, когда режим переключается с «режима M1 без ручного управления» в «режим M2 с ручным управлением», изменения в отображении, осуществляемом проекционным дисплеем 61 и дисплеем 62 приборной панели и объявления направлены на зрительное восприятие и слуховое восприятие. Это будет объяснено ниже на основе Фиг. 6 и Фиг. 7.
[0085] Во-первых, проекционный дисплей 61 и дисплей 62 измерителя имеют блок отображения пиктограммы рулевого колеса, блок отображения ограничения скорости, блок отображения установленной скорости транспортного средства, блок отображения сообщений, блок отображения полосы движения/транспортного средства-носителя, и тому подобное. Далее, если выбран «режим M1 без ручного управления», блок отображения пиктограммы рулевого колеса, например, выполняет отображение синим цветом и отображает только пиктограмму рулевого колеса, как показано на Фиг. 6.
[0086] Если выбран «режим M2 с ручным управлением», блок отображения пиктограммы рулевого колеса, например, выполняет отображение зеленым цветом и отображает пиктограммы рулевого колеса и рук, как показано на Фиг. 7. Далее, «пожалуйста, держите рулевое колесо» отображается на блоке отображения сообщений и объявляется.
[0087] Таким образом, в случаях, когда режим переключается с «режима M1 без ручного управления» на «режим M2 с ручным управлением», водитель может быть уведомлен о том, что режим помощи в удержании полосы движения переключен, посредством изменений в отображении, выполняемом на проекционном дисплее 61 и дисплее 62 приборной панели. То, что водитель держит руки на рулевом колесе 23, может быть подтверждено с использованием сигнала датчика от датчика 92 касания и/или датчика 93 крутящего момента.
[0088] [Работа процесса управления для переключения режима помощи в удержании полосы движения]
Работа процесса управления для переключения режима помощи в удержании полосы движения, которое выполняется контроллером 47 переключения режимов, поясняется ниже на основе блок-схемы, показанной на Фиг.5. В нижеследующем пояснении фактическая скорость транспортного средства обозначена VR, ограничения скорости - VL(n) и VL(n+1), установленные скорости транспортного средства - VS(n) и VS(n+1), разность скоростей транспортного средства – ΔV, и пороговое значение скорости транспортного средства - Vth.
[0089] Во-первых, после нажатия главного переключателя 81 водитель осуществляет ускорение или замедление до желаемой установленной скорости. При нажатии переключателя 83 установка/движения накатом, если не обнаружено ограничение скорости VL (n) для проезжей части, по которой осуществляется движение, или если помощь при ограничении скорости отключена, процесс продолжается в следующем порядке: S1 → S2 → S3 → S4. В S3 в качестве режима помощи в удержании полосы движения выбирается «режим M2 с ручным управлением». На S4, если условия для деактивации управления помощью при вождении не выполнены, процесс возвращается на S2. То есть, если для проезжей части, по которой осуществляется движение, не обнаружено ограничение скорости VL(n), , или если помощь при ограничении скорости отключена, скорость при нажатии переключателя 83 установки/движения накатом используется в качестве установленной скорости транспортного средства VS(n). Затем активируется управление помощью при вождении посредством блока 4 управления ADAS путём выбора «режима M2 с ручным управлением». Даже после того, как управление помощью при вождении было активировано, если состояние, в котором ограничение скорости VL(n) не обнаружено или в котором помощь при ограничении скорости отключена, продолжается, выбор «режима M2 с ручным управлением» сохраняется.
[0090] Если переключатель 83 установки/движения накатом был нажат после нажатия главного переключателя 81, если обнаружено ограничение скорости VL(n) для проезжей части, по которой осуществляется движение, и включена помощь при ограничении скорости, процесс продолжается в следующем порядке: S1 → S2 → S5 → S6. На S5 определяется, был ли выбран «режим M2 с ручным управлением», а на S6 выполняется определение, существуют ли условия для переключения из «режима M2 с ручным управлением» в «режим M1 без ручного управления». То есть, если для проезжей части, по которой осуществляется движение, обнаружено ограничение скорости VL(n) и включена помощь при ограничении скорости, помощь при ограничении скорости использует ограничение скорости VL(n) в качестве установленной скорости VS(n) транспортного средства, и управление помощью при вождении посредством блока 4 управления ADAS активируется посредством выбора «режима M2 с ручным управлением». Затем, если выполнены условия для переключения из «режима M2 с ручным управлением» в «режим M1 без ручного управления», процесс переходит с S6 на S7 → S4, и на S7 режим переключается с «режима M2 с ручным управлением» на «режим M1 без ручного управления».
[0091] Если установленная скорость VS(n) транспортного средства стала больше, чем обнаруженное ограничение скорости VL(n), поскольку водитель выполнил операцию для увеличения установленной скорости VS(n) транспортного средства во время движения, при котором выбран «режим M1 без ручного управления», процесс выполняется в следующем порядке: S2 → S5 → S8 → S9 → S10. На S9 выполняется определение, выполнил ли водитель операцию для увеличения установленной скорости VS(n) транспортного средства. На S10 выполняется определение того, увеличилась ли фактическая скорость VR транспортного средства по меньшей мере до оцененного значения скорости транспортного средства (ограничение скорости+α).
[0092] Если на S10 определено, что фактическая скорость VR транспортного средства увеличилась по меньшей мере до оцененного значения скорости транспортного средства, процесс переходит с S10 на S11 → S4. На S11 режим переключается с «режима M1 без ручного управления» на «режим M2 с ручным управлением».
[0093] Если установленная скорость VS(n) транспортного средства равна или меньше обнаруженного ограничения скорости VL(n), но водитель выполняет операцию нажатия педали акселератора во время движения, при котором выбран «режим M1 без ручного управления», процесс идет в следующем порядке: S2 → S5 → S8 → S14 → S15. На S14 выполняется определение того, выполнил ли водитель операцию нажатия педали акселератора. На S15 определяется, снял ли водитель руки с рулевого колеса 23.
[0094] В случаях, когда на S15 определено, что водитель снял руки с рулевого колеса 23, процесс переходит с S15 на S16 → S17, а на S16 водитель уведомляется посредством отображения, объявления или тому подобного о необходимости положить руки на рулевое колесо 23. На S17 определяется, положил ли водитель руки на рулевое колесо 23. Если на S17 определено, что водитель положил руки на рулевое колесо 23, процесс переходит с S17 на S18, и на S18 режим переключается с «режима M1 без ручного управления» на «режим M2 с ручным управлением». Если на S15 определено, что водитель положил руки на рулевое колесо 23, процесс переходит с S15 на S18, а на S18 режим переключается с «режима M1 без ручного управления» на «режим M2 с ручным управлением».
[0095] Если режим переключается на «режим M2 с ручным управлением» на S18, процесс переходит с S18 на S19 → S4. На S19 начинается ускорение в ответ на операцию нажатия педали акселератора со стороны водителя. То есть, даже если на S14 обнаружена операция нажатия педали акселератора со стороны водителя, ускорение откладывается до тех пор, пока режим не будет переключен на «режим M2 с ручным управлением», и ускорение начинается после того, как режим переключен на «режим М2 с ручным управлением».
[0096] В случаях, когда установленная скорость VS(n) транспортного средства больше, чем обнаруженная скорость VL(n) транспортного средства, и истекло установленное время T с момента вновь обнаруженного ограничения скорости VL(n+1), уменьшенного по сравнению с текущим ограничением скорости VL(n) во время движения, при котором был выбран «режим M1 без ручного управления», процесс продолжается в следующем порядке: S2 → S5 → S8 → S9 → S12 → S13.
[0097] Если на S12 определено, что установленное время T истекло с момента обнаружения уменьшения ограничения скорости VL(n+1), процесс переходит с S12 на S13, а на S13 выполняется определение того, превышает ли разность ΔV скорости транспортного средства, найденная путем вычитания ограничения VL(n+1) скорости из фактической скорости VR транспортного средства, пороговое значение Vth скорости транспортного средства, что указывает на то, что скорость транспортного средства сошлась. Если на S13 определено, что разность ΔV скорости транспортного средства ≤ порогового значения Vth скорости транспортного средства, процесс переходит с S13 на S4.
[0098] Если на S13 определено, что разность скорости ΔV транспортного средства > порогового значения Vth скорости транспортного средства, процесс переходит с S13 на S11, и на S11 режим переключается с «режима M1 без ручного управления» на «режим M2 с ручным управлением». Если на S4 выполнены условия для деактивации управления помощью при вождении, процесс переходит к завершению, и управление помощью при вождении деактивируется.
[0099] Таким образом, в процессе управления для переключения режимов помощи в удержании полосы движения, в котором выполняется переключение между «режимом M1 без ручного управления» и «режимом M2 с ручным управлением», выполняются следующие процессы управления (a) - (e).
(a) В случаях, в которых ограничение VL(n) скорости для проезжей части, по которой движется транспортное средство-носитель, не обнаружено, и в случаях, в которых помощь при ограничении скорости был отключена, выбор «режима M1 без ручного управления» запрещен, и выбирается только «режим M2 с ручным управлением».
(b) Во время движения с удержанием полосы движения, при котором выбран «режим M2 с ручным управлением», выполняется определение того, были ли выполнены условия отсутствия ручного управления, и, если условия отсутствия ручного управления выполнены, режим переключается на «режим M1 без ручного управления».
(c) Во время движения с удержанием полосы движения, при котором выбран «режим M1 без ручного управления», в случаях, в которых установленная скорость VS(n) транспортного средства стала больше обнаруженного ограничения VL(n) скорости, поскольку водитель выполнил операцию для увеличения установленной скорости VS(n) транспортного средства, режим переключается на «режим M2 с ручным управлением» при условии, что фактическая скорость VR транспортного средства достигла по меньшей мере оцененного значения скорости транспортного средства (ограничение скорости+α).
(d) Во время движения с удержанием полосы движения, при котором выбран «режим M1 с ручным управлением», в случаях, когда установленная скорость VS(n) транспортного средства равна или меньше обнаруженного ограничения скорости VL(n), но водитель выполнил операцию нажатия педали акселератора, режим переключается на «режим М2 с ручным управлением» при условии, что водитель положил руки на рулевое колесо 23. После переключения режима на «режим M2 с ручным управлением» начинается ускорение посредством операции нажатия педали акселератора.
(e) Во время движения с удержанием полосы движения, при котором выбран «режим M1 без ручного управления», в случаях, когда установленная скорость VS(n) транспортного средства стала больше, чем обнаруженное ограничение скорости VL(n), поскольку обнаружено вновь уменьшенное ограничение скорости VL(n+1), режим переключается на «режим M2 с ручным управлением» при условии, что разность ΔV скорости транспортного средства по истечении установленного времени T с момента обнаружения превышает пороговое значение Vth скорости транспортного средства.
[0100] [Работа управления переключением режимов для каждого условия движения, при котором превышено ограничение скорости]
Среди процессов управления (a) - (e), описанных выше, процесс управления (c) представляет собой управление переключением режимов вследствие операции для увеличения установленной скорости VS транспортного средства. Операция управления переключением режимов помощи при удержании полосы движения вследствие изменения установленной скорости VS транспортного средства, вызванного операцией со стороны водителя, будет пояснена ниже на основе временной диаграммы, показанной на Фиг.8.
[0101] Во время движения с удержанием полосы движения, при котором выбран «режим M1 без ручного управления» и ограничение скорости VL(n) используется в качестве установленной скорости VS(n) транспортного средства, считается, что водитель дважды выполнил операцию изменения установленной скорости транспортного средства для увеличения установленной скорости VS(n) транспортного средства выше ограничения скорости VL(n). В этом случае увеличение фактической скорости VR транспортного средства начинается в момент t3 на основании операции для увеличения установленной скорости VS(n) транспортного средства. Если фактическая скорость VR транспортного средства увеличивается по меньшей мере до оцененного значения скорости транспортного средства (ограничение скорости VL(n)=α) в момент t4, режим переключается с «режима M1 без ручного управления» на «режим M2 с ручным управлением».
[0102] Таким образом, во время движения с удержанием полосы движения, при котором выбран «режим M1 без ручного управления», если выполняется операция изменения установленной скорости транспортного средства для увеличения установленной скорости VS(n) транспортного средства выше ограничения скорости VL, увеличение фактической скорости VR транспортного средства по меньшей мере до оцененного значения скорости транспортного средства является условием для переключения в «режим M2 с ручным управлением».
[0103] Среди процессов управления (a) - (e), описанных выше, процесс управления (d) представляет собой управление переключением режимов вследствие операции нажатия педали акселератора. Операция управления переключением режимов помощи в удержании полосы движения вследствие операции нажатия педали акселератора со стороны водителя будет пояснена ниже на основе временной диаграммы, показанной на Фиг.9.
[0104] Во время движения с удержанием полосы движения, при котором выбран «режим M1 без ручного управления» и ограничение скорости VL используется в качестве установленной скорости VS(n) транспортного средства, считается, что водитель выполнил операцию нажатия педали акселератора в момент t1. В этом случае водителя просят удерживать рулевое колесо 23 в момент t1, в который водитель выполнил операцию нажатия педали акселератора. Если подтверждено, что водитель держит рулевое колесо 23 в момент t2, режим переключается с «режима M1 без ручного управления» на «режим M2 с ручным управлением».
[0105] Таким образом, во время движения с удержанием полосы движения, при котором выбран «режим M1 без ручного управления», если водитель выполняет операцию нажатия педали акселератора, то, что водитель держит рулевое колесо 23, является условием для переключения в «режим М2 с ручным управлением». Затем, после того, как режим переключен на «режим M2 с ручным управлением» в момент t2, начинается ускорение транспортного средства-носителя в ответ на нажатие на педаль акселератора со стороны водителя, и фактическая скорость VR транспортного средства, соответствующая положению педали акселератора, достигается в момент t3. То есть начало ускорения транспортного средства-носителя имеет условие, состоящее в том, что водитель держит рулевое колесо 23 в готовности к операциям с рулевым колесом.
[0106] Среди процессов управления (a) - (e), описанных выше, процесс управления (e) представляет собой управление переключением режимов вследствие уменьшения ограничения скорости VL(n). Операция переключения управления режимом помощи в удержании полосы движения вследствие изменения ограничения скорости VL(n) для проезжей части, по которой движется транспортное средство-носитель, поясняется ниже на основе временной диаграммы, показанной на Фиг.10.
[0107] Во время движения с удержанием полосы движения, при котором выбран «режим M1 с ручным управлением» и ограничение скорости VL(n) используется в качестве установленной скорости VS(n) транспортного средства, вновь обнаруженное ограничение скорости VL (n+1) считается уменьшенным по сравнению с предыдущим ограничением скорости VL (n) в момент t1. В этом случае выполняется определение того, превысила ли фактическая скорость VR транспортного средства ограничение скорости VL(n+1) в момент t2, то есть когда истекло установленное время T с момента, когда было определено, что вновь обнаруженное ограничение скорости VL(n+1) уменьшилось. Если определено, что фактическая скорость VR транспортного средства превысила ограничение скорости VL(n+1) (ΔV > Vth), режим переключается с «режима M1 без ручного управления» на «режим M2 с ручным управлением».
[0108] Таким образом, во время движения с удержанием полосы движения, при котором выбран «режим M1 без ручного управления», если вновь обнаруженное ограничение скорости VL(n+1) уменьшается по сравнению с предыдущим ограничением скорости VL(n), то, что фактическая скорость транспортного средства VR не сходится с ограничением скорости VL(n+1) даже после ожидания в течение установленного времени T, является условием для переключения в «режим M2 с ручным управлением». Если помощь при ограничении скорости работает нормально, ограничение скорости VL(n+1), вновь обнаруженное в момент t1, используется в качестве установленной скорости VS(n+1) транспортного средства, и фактическая скорость VR транспортного средства сходится с ограничением скорости VL(n+1) в момент t2, который наступает по истечении установленного времени T, как показано пунктирной линией на Фиг.10.
[0109] Как пояснено выше, способ помощи при вождении и устройство помощи при вождении согласно первому варианту осуществления демонстрируют эффекты, перечисленные ниже.
[0110] (1) Этот способ помощи при вождении имеет функцию управления скоростью/интервалом транспортного средства и функцию удержания полосы движения в качестве функций помощи при вождении для помощи водителю в операциях управления, и использует контроллер 47 переключения режимов для переключения режимов помощи в удержании полосы движения, которые помогают транспортному средству-носителю оставаться в пределах полосы движения во время движения. Способ помощи при вождении имеет в качестве функции управления скоростью/интервалом транспортного средства функцию, в которой в случаях, когда обнаружено ограничение скорости для проезжей части, по которой движется транспортное средство-носитель, установленная скорость транспортного средства, используемая при управлении скоростью транспортного средства, перезаписывается на упомянутое ограничение скорости. Во время движения с удержанием полосы движения, в котором «режим M1 без ручного управления», который позволяет водителю снять руки с рулевого колеса 23, выбран в качестве режима помощи в удержании полосы движения, выполняется определение того, выполнено ли условие движения, при котором фактическая скорость VR транспортного средства превышает ограничение скорости VL(n) для проезжей части, по которой движется транспортное средство-носитель. Если определено, что условие движения, при котором фактическая скорость VR транспортного средства превышает ограничение скорости VL(n), выполнено, режим переключается с «режима M1 без ручного управления» на «режим M2 с ручным управлением», условием которого является то, что водитель держит руки на рулевом колесе 23 (Фиг.4). Таким образом можно предложить способ помощи при вождении, который стимулирует движение на основе надлежащей помощи при вождении путем снижения уровня помощи при вождении, если необходимо оповещение водителя в ситуации движения с удержанием полосы движения с повышенным уровнем помощи при вождении.
[0111] (2) Во время движения с удержанием полосы движения, при котором выбран «режим M1 без ручного управления», выполняется определение, выполнил ли водитель операцию для изменения установленной скорости транспортного средства для повышения установленной скорости VS(n) транспортного средства выше ограничения скорости VL(n). Если определено, что водитель выполнил операцию для увеличения установленной скорости VS(n) транспортного средства, и определено, что фактическая скорость VR транспортного средства увеличилась по меньшей мере до оцененного значения скорости транспортного средства, найденного путем прибавления допуска на ошибку α к ограничению скорости VL(n), режим переключается с «режима M1 без ручного управления» на «режим M2 с ручным управлением» (на Фиг. 5, S9 → S10 → S11). Таким образом, при том, что выбран «режим M1 без ручного управления», если водитель выполнил операцию для изменения установленной скорости транспортного средства для увеличения установленной скорости VS(n) транспортного средства выше ограничения скорости VL, режим может быть переключен на «режим M2 с ручным управлением» при условии, что фактическая скорость VR транспортного средства увеличивается по меньшей мере до оцененного значения скорости транспортного средства. Кроме того, может быть предусмотрена функция, позволяющая изменять установленную скорость VS(n) транспортного средства, которая используется для управления скоростью/интервалом транспортного средства, посредством операции со стороны водителя во время движения с удержанием полосы движения на основании выбора «режима M1 с ручным управлением».
[0112] (3) Во время движения с удержанием полосы движения, при котором выбран «режим M1 без ручного управления», выполняется определение того, выполнил ли водитель операцию нажатия педали акселератора. Если определено, что водитель выполнил операцию нажатия педали акселератора, водителя просят держать рулевое колесо 23, и если подтверждено, что водитель держит рулевое колесо 23, режим переключается с «режима M1 без ручного управления» на «режим M2 с ручным управлением» (на Фиг. 5, S14 - S18). Таким образом, при том, что выбран «режим M1 без ручного управления», когда водитель выполняет операцию нажатия педали акселератора, режим может быть переключен на «режим M2 с ручным управлением» при условии, что водитель держит рулевое колесо 23. Кроме того, может быть предусмотрена функция для обеспечения ускорения на основании нажатия педали акселератора со стороны водителя во время движения с удержанием полосы движения на основе выбора «режима M1 без ручного управления».
[0113] (4) В случаях, когда водитель выполнил операцию нажатия педали акселератора во время движения, при котором выбран «режим M1 без ручного управления», ускорение транспортного средства-носителя откладывается до тех пор, пока режим не будет переключен на «режим M2 с ручным управлением», и ускорение транспортного средства-носителя в ответ на операцию нажатия на педаль акселератора со стороны водителя начинается после того, как режим переключен на «режим M2 с ручным управлением» (на Фиг. 5, S18 → S19). Таким образом, во время движения с удержанием полосы движения, при котором выбран «режим M1 без ручного управления», когда водитель выполняет операцию нажатия педали акселератора, ускорение транспортного средства-носителя может быть начато после перехода в состояние, в котором возможно управление рулевым колесом со стороны водителя.
[0114] (5) Во время движения с удержанием полосы движения, при котором выбран «режим M1 без ручного управления», выполняется определение того, уменьшилось ли вновь обнаруженное ограничение скорости VL(n+1) по сравнению с ограничением скорости VL(n). По истечении установленного времени T с момента определения, что вновь обнаруженное ограничение скорости VL(n+1) уменьшилось, выполняется определение того, превысила ли фактическая скорость VR транспортного средства ограничение скорости VL(n+1). Если определено, что фактическая скорость VR транспортного средства превысила ограничение скорости VL(n+1), режим переключается с «режима M1 без ручного управления» на «режим M2 с ручным управлением» (на Фиг. 5, S12 → S13 → S11). Таким образом, при том, что выбран «режим M1 без ручного управления», если вновь обнаруженное ограничение скорости VL(n+1) уменьшилось по сравнению с предыдущим ограничением скорости VL(n), режим может быть переключен на «режим M2 с ручным управлением» при условии, что скорость транспортного средства не сошлась даже после ожидания в течение установленного времени T. Кроме того, может быть предусмотрена функция для перезаписи установленной скорости транспортного средства VS(n+1), используемой для управления скоростью/интервалом транспортного средства, на ограничение скорости VL(n+1), если ограничение скорости VL(n+1) для проезжей части, по которой движется транспортное средство-носитель, вновь обнаружено во время движения с удержанием полосы движения на основе выбора «режима M1 без ручного управления».
[0115] (6) В случаях, когда выбран «режим M2 с ручным управлением», определяются условия (условия отключения ручного управления) для переключения из «режима M2 с ручным управлением» в «режим M1 без ручного управления». Когда условия переключения (условия отключения ручного управления) выполнены, режим переключается с «режима M2 с ручным управлением» на «режим M1 без ручного управления» (на Фиг. 5, S5 → S6 → S7). Таким образом, в случаях, когда выбран «режим M2 с ручным управлением», можно гарантировать, что участки движения, на которых выбран «режим M1 без ручного управления» при движении с удержанием полосы движения, будут продолжительными, за счёт открытия возможности восстановления «режима M1 с ручным управлением».
[0116] (7) Это устройство помощи при вождении имеет функцию управления скоростью/интервалом транспортного средства и функцию удержания полосы движения в качестве функций помощи при вождении для помощи в операциях управления, выполняемых водителем, и снабжено контроллером 47 переключения режимов для переключения между режимами помощи в удержании полосы движения, которые помогают транспортному средству-носителю оставаться в пределах полосы движения во время движения. В качестве функции управления скоростью/интервалом транспортного средства устройство имеет функцию, в которой в случаях, когда обнаружено ограничение скорости для проезжей части, по которой движется транспортное средство-носитель, установленная скорость транспортного средства, используемая в управлении скоростью транспортного средства, перезаписывается на упомянутое ограничение скорости. Контроллер 47 переключения режимов имеет: блок 471 оценки условий движения, который во время движения с удержанием полосы движения, при котором «режим M1 без ручного управления», который позволяет водителю снять руки с рулевого колеса 23, выбран в качестве режима помощи в удержании полосы движения, определяет, выполнено ли условие движения, при котором фактическая скорость VR транспортного средства для транспортного средства-носителя превышает ограничение скорости VL(n) для проезжей части, по которой движется транспортное средство-носитель; и блок 472 переключения режимов, который, если определено, что соблюдено условие движения, при котором фактическая скорость VR транспортного средства превышает ограничение скорости VL(n), переключает режим с «режима M1 без ручного управления» на «режим M2 с ручным управлением», при котором водитель держит руки на рулевом колесе 23 (Фиг. 4). Таким образом, можно предложить устройство помощи при вождении, которое стимулирует движение на основе надлежащей помощи при вождении путём снижения уровня помощи при вождении, когда необходимо оповещение водителя в ситуации движения с удержанием полосы движения с повышенным уровнем помощи при вождении.
[0117] Способ помощи при вождении и устройство помощи при вождении согласно настоящему изобретению описаны выше на основе первого варианта осуществления. Однако конкретная конфигурация не ограничена этим первым вариантом осуществления; в конструкцию могут быть внесены изменения, дополнения и тому подобное, в той мере, в которой они не отклоняются от объема изобретения в соответствии с формулой изобретения.
[0118] В первом варианте осуществления был представлен пример, который был основан на блоке 471a определения изменения установленной скорости транспортного средства, блоке 471b определения управления акселератором и блоке 471c определения ограничения скорости в качестве блока 471 оценки условий движения. Однако блок оценки условий движения не ограничен этими блоками определения, при условии, что блок определения оценивает, выполнено ли условие движения, состоящее в том, что фактическая скорость транспортного средства для транспортного средства-носителя превышает ограничение скорости для проезжей части, по которой движется транспортное средство-носитель, при движении, в котором был выбран «режим M1 без ручного управления».
[0119] В первом варианте осуществления был представлен пример, в котором способ помощи при вождении и устройство помощи при вождении по настоящему изобретению использовались в транспортном средстве с системой помощи при вождении, в котором установлена усовершенствованная система помощи водителю (ADAS), которая помогает водителю в операциях управления. Однако способ помощи при вождении и устройство помощи при вождении по настоящему изобретению также могут быть применены к транспортному средству с автономным управлением, которое выполняет управление помощью в управлении в отношении движения, торможения и угла рулевого управления в соответствии с целевой траекторией движения, и которое движется с автономным управлением (AD), когда выбран режим автономного управления.
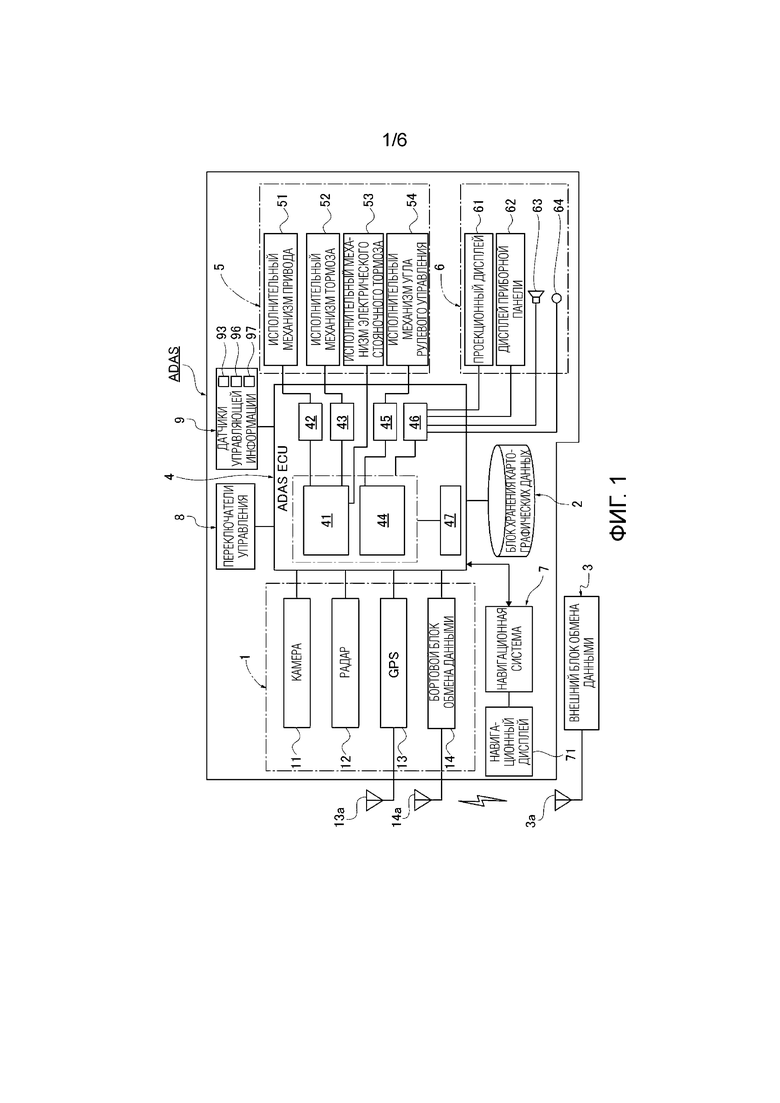
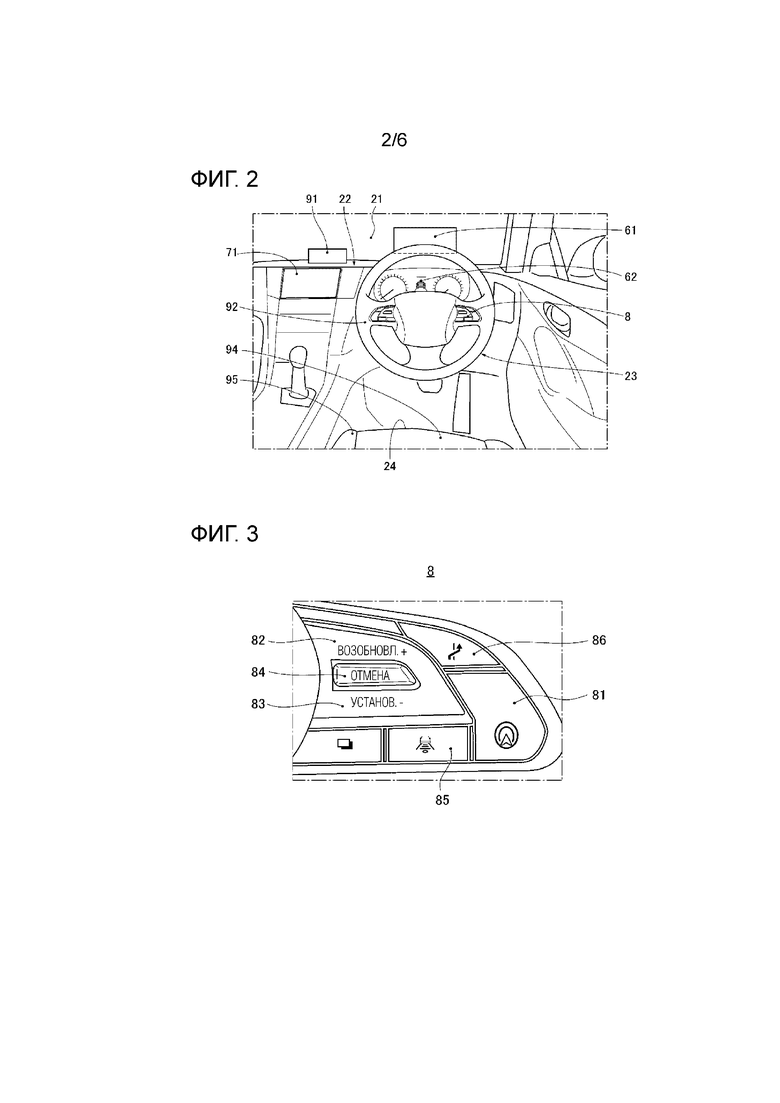
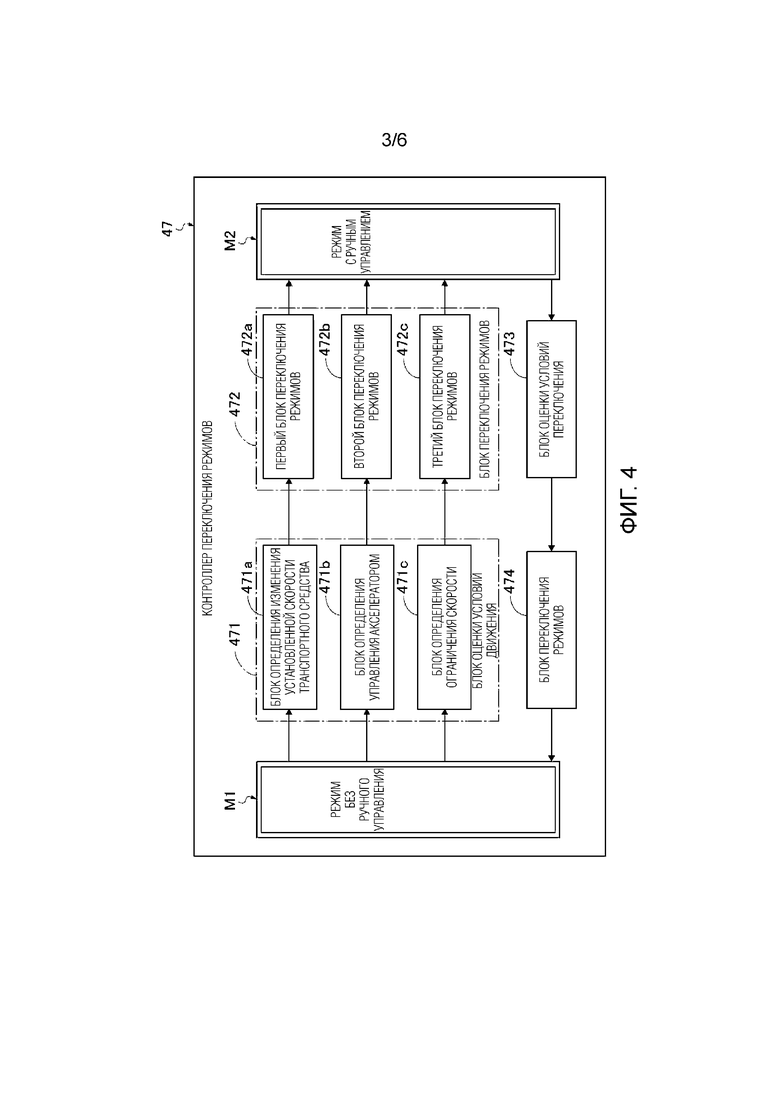
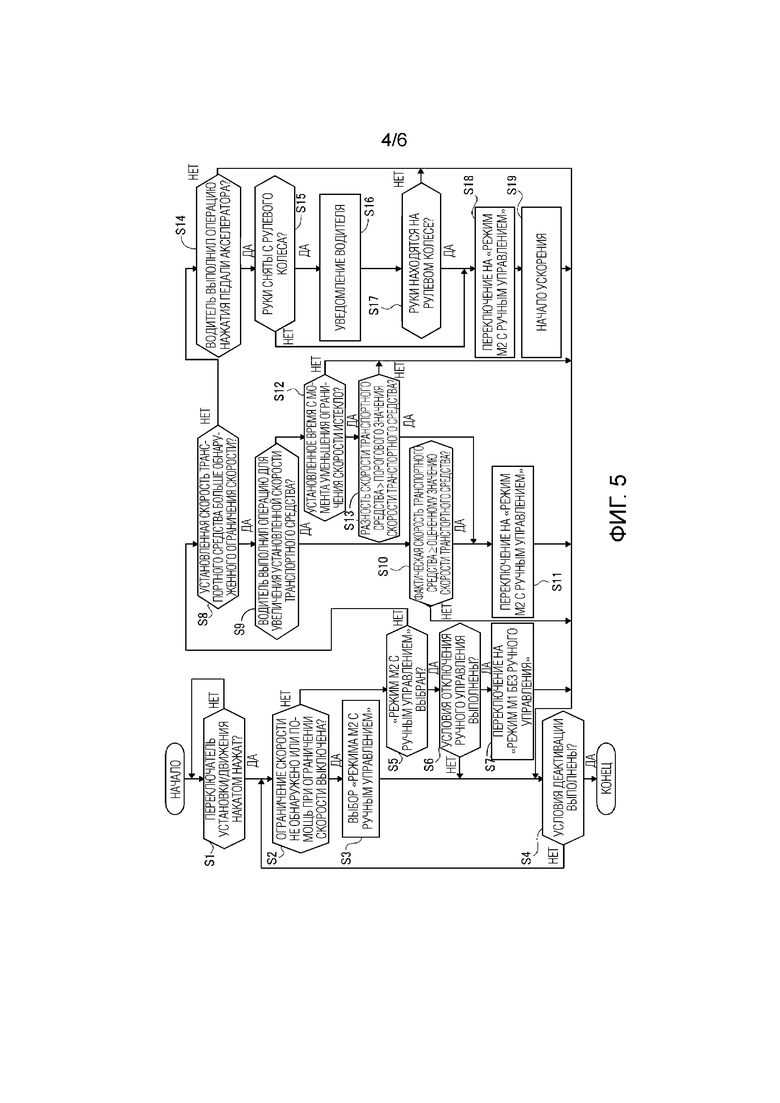
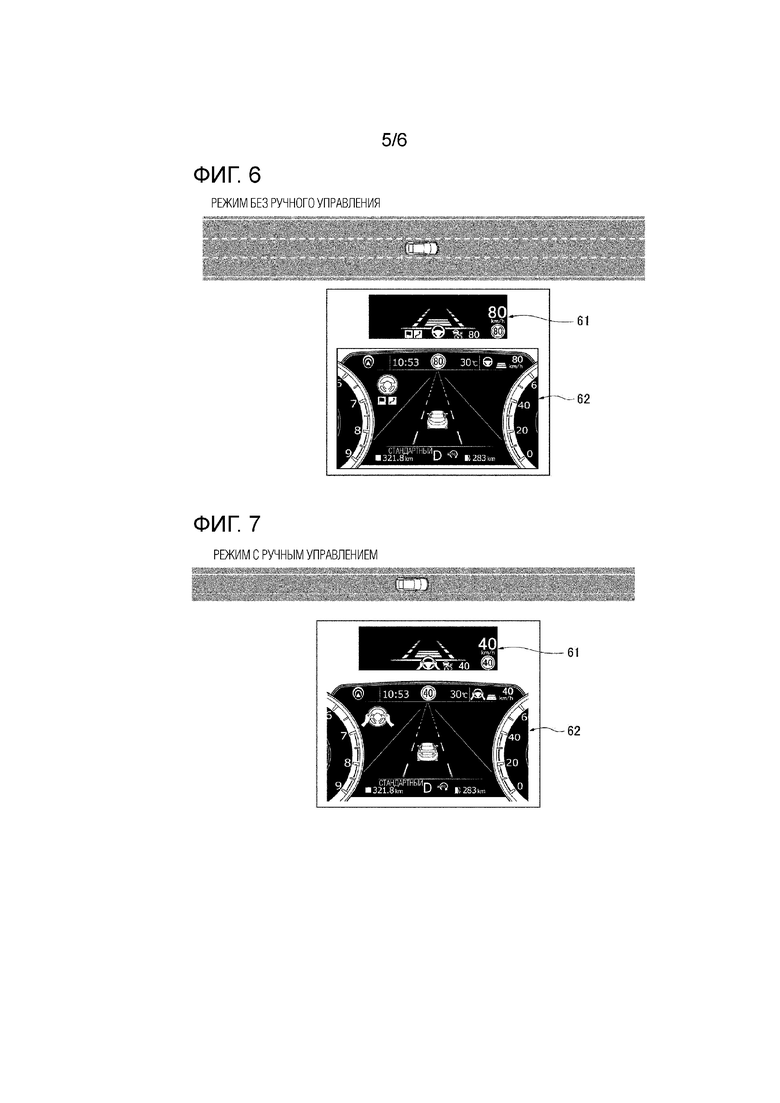
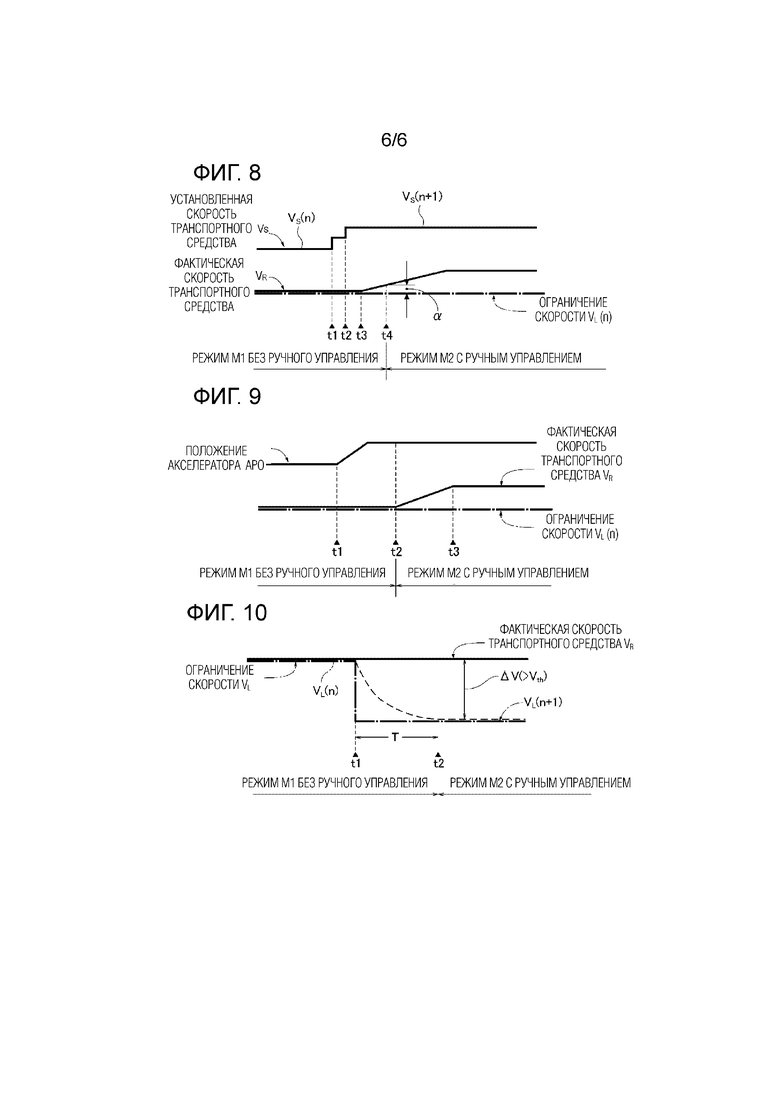
Группа изобретений относится к способу и устройству помощи при вождении. Устройство включает в себя контроллер переключения режимов. Контроллер включает в себя: блок оценки условий движения и блок переключения режимов. Блок оценки условий движения оценивает, выполнено ли условие движения, при котором фактическая скорость транспортного средства для транспортного средства-носителя превышает ограничение скорости для проезжей части. При этом режим без ручного управления позволяет водителю снять руки с рулевого колеса и выбран в качестве режима помощи при удержании полосы движения. Блок переключения режимов переключает режим из режима без ручного управления в режим с ручным управлением. При этом водитель держит руки на рулевом колесе и выполнено условие движения, при котором фактическая скорость транспортного средства превышает ограничение скорости. Достигается повышение безопасности использования помощи при вождении. 2 н. и 5 з.п. ф-лы, 10 ил.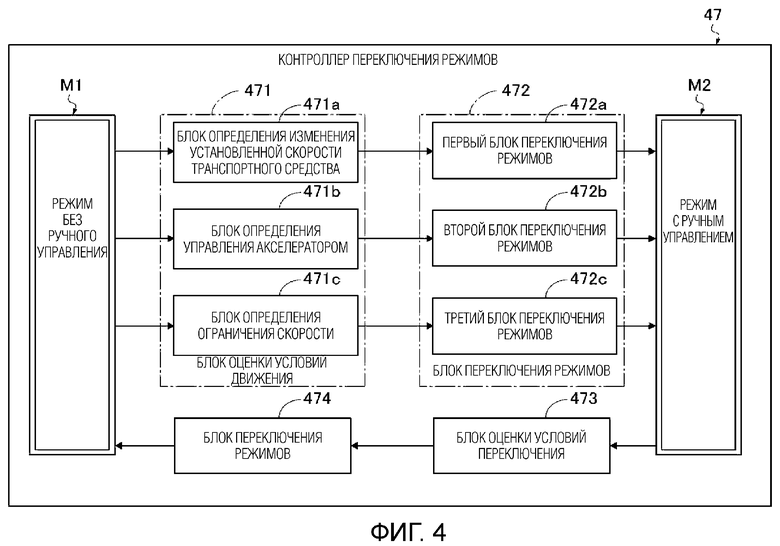
1. Способ помощи при вождении, который имеет функцию управления скоростью/интервалом транспортного средства, которая выполняет управление скоростью транспортного средства на основании установленной скорости транспортного средства, и функцию удержания полосы движения, которая помогает транспортному средству-носителю оставаться в пределах полосы движения во время движения, в качестве функций помощи при вождении для помощи в операциях управления со стороны водителя, отличающийся тем, что:
во время движения с удержанием полосы движения в режиме без ручного управления, который позволяет водителю снять руки с рулевого колеса, в качестве режима помощи в удержании полосы движения, оценивают, было ли выполнено условие движения, при котором фактическая скорость транспортного средства для транспортного средства-носителя превышает ограничение скорости для проезжей части, по которой движется транспортное средство-носитель; и
переключают режим из режима без ручного управления в режим с ручным управлением, в котором имеется условие, что водитель держит руки на рулевом колесе, при оценке того, что выполнено условие движения, при котором фактическая скорость транспортного средства превышает ограничение скорости.
2. Способ помощи при вождении по п. 1, отличающийся тем, что:
определяют, выполнил ли водитель операцию изменения установленной скорости транспортного средства для увеличения установленной скорости транспортного средства выше ограничения скорости во время движения с удержанием полосы движения, в котором выбран режим без ручного управления; и
при этом переключение режима из режима без ручного управления на режим с ручным управлением выполняется при определении того, что водитель выполнил операцию по увеличению установленной скорости транспортного средства, и фактическая скорость транспортного средства увеличилась по меньшей мере до оцененного значения скорости транспортного средства, найденного путём добавления допуска на ошибку к ограничению скорости.
3. Способ помощи при вождении по п. 1 или 2, отличающийся тем, что:
определяют, выполнил ли водитель операцию нажатия педали акселератора во время движения с удержанием полосы движения, при котором выбран режим без ручного управления;
просят водителя держать рулевое колесо при определении, что водитель выполнил операцию нажатия педали акселератора; и
при этом переключение режима из режима без ручного управления в режим с ручным управлением выполняется при подтверждении того, что водитель держит рулевое колесо.
4. Способ помощи при вождении по п. 3, отличающийся тем, что:
откладывают ускорение транспортного средства-носителя до тех пор, пока режим не будет переключен в режим с ручным управлением в случаях, в которых водитель выполняет операцию нажатия педали акселератора во время движения с удержанием полосы движения, в котором выбран режим без ручного управления; и
начинают ускорение транспортного средства-носителя в ответ на нажатие педали акселератора со стороны водителя после того, как режим был переключен на режим с ручным управлением.
5. Способ помощи при вождении по любому из пп. 1-4, отличающийся тем, что:
определяют, уменьшилось ли вновь обнаруженное ограничение скорости по сравнению с предыдущим ограничением скорости во время движения с удержанием полосы движения, при котором выбран режим без ручного управления;
после истечения установленного времени с момента, когда было определено, что вновь обнаруженное ограничение скорости уменьшилось, определяют, превысила ли фактическая скорость транспортного средства ограничение скорости; и
режим переключается с режима без ручного управления на режим с ручным управлением при определении того, что фактическая скорость транспортного средства превысила ограничение скорости.
6. Способ помощи при вождении по любому из пп. 1-5, отличающийся тем, что:
условие для переключения из режима с ручным управлением в режим без ручного управления определяется в случаях, в которых выбран режим с ручным управлением; и
режим переключается из режима с ручным управлением в режим без ручного управления, когда выполняются упомянутые условия для переключения.
7. Устройство помощи при вождении, которое включает в себя функцию управления скоростью/интервалом транспортного средства и функцию удержания полосы движения в качестве функций помощи при вождении для помощи в операциях управления со стороны водителя, и которое снабжено контроллером переключения режимов для переключения режимов помощи в удержании полосы движения, которые помогают транспортному средству-носителю оставаться в пределах полосы движения во время движения, отличающееся тем, что:
контроллер переключения режимов включает в себя
блок оценки условий движения, который оценивает, выполнено ли условие движения, при котором фактическая скорость транспортного средства для транспортного средства-носителя превышает ограничение скорости для проезжей части, по которой движется транспортное средство-носитель, во время движения с удержанием полосы движения, при котором режим без ручного управления, позволяющий водителю снять руки с рулевого колеса, выбран в качестве режима помощи при удержании полосы движения; и
блок переключения режимов, который переключает режим из режима без ручного управления в режим с ручным управлением, в котором имеется условие, что водитель держит руки на рулевом колесе, при оценке того, что выполнено условие движения, при котором фактическая скорость транспортного средства превышает ограничение скорости.
| JP 2019006275 A, 17.01.2019 | |||
| WO 2018012180 A1, 18.01.2018 | |||
| JP 2018203006 A, 27.12.2018 | |||
| US 2015006028 A1, 01.01.2015 | |||
| US 2016264147 A1, 15.09.2016. |
