1. Область техники, к которой относится изобретение
[0001] Изобретение относится к системе помощи при вождении.
2. Описание предшествующего уровня техники
[0002] Известна система, осуществляющая предаварийный контроль (например, предупреждение, автоматическое торможение и т. д.) транспортного средства при обнаружении препятствия, вероятность столкновения с которым очень высока (см., например, опубликованная патентная заявка Японии № 2012-121534 (JP 2012-121534 A)). Система (далее — «связанная система»), предложенная в заявке JP 2012-121534 A, определяет, что водитель неправильно или ошибочно управляет акселератором, и осуществляет предаварийный контроль, когда степень нажатия на педаль акселератора больше порогового значения Sa, и скорость нажатия педали акселератора больше порогового значения Va.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Обычно, когда рассматриваемое транспортное средство, управляемое водителем, например, обгоняет или опережает транспортное средство впереди, водитель вероятно почти полностью и быстро нажимает на педаль акселератора. Таким образом, когда водитель намеренно нажимает педаль акселератора, чтобы, например, обогнать или опередить транспортное средство впереди, весьма вероятно, что связанная система распознает управление водителя педалью акселератора как неправильное и выполнит предаварийный контроль. В результате, связанная система с высокой вероятностью осуществит ненужный предаварийный контроль, когда водитель намеренно использует педаль акселератора. В этом случае велика вероятность, что водитель будет недоволен ненужным предаварийным контролем.
[0004] Изобретение предлагает систему помощи при вождении, которая осуществляет предаварийный контроль без сбоев в случае неправильного управления педалью акселератора, при этом снижая вероятность выполнения ненужного предаварийного контроля.
[0005] Первый аспект изобретения предлагает систему помощи при вождении. Система помощи при вождении согласно первому аспекту содержит: блок обнаружения преграды, выполненный с возможностью обнаружения информации о преграде, включая относительное положение преграды по отношению к рассматриваемому транспортному средству, информация о преграде содержит относительную скорость преграды по отношению к рассматриваемому транспортному средству; блок определения степени нажатия, выполненный с возможностью получения степени воздействия для ускорения, относящейся к степени нажатия педали акселератора рассматриваемого транспортного средства; блок определения скорости, выполненный с возможностью определения скорости транспортного средства, скорость транспортного средства является скоростью рассматриваемого транспортного средства; и блок осуществления предаварийного контроля, выполненный с возможностью осуществления предаварийного контроля для предотвращения столкновения с преградой, когда выполнено заранее определенное условие начала контроля, где заранее определенное условие начала контроля содержит обязательное условие о том, что установлено первое условие и второе условие, при этом первое условие состоит в том, что значение индекса столкновения соответствует условию заранее установленного значения индекса, где значение индекса столкновения взаимосвязано с возможностью столкновения преграды и рассматриваемого транспортного средства и указанное значение индекса столкновения рассчитывается на основе информации о преграде, а второе условие состоит в том, что степень воздействия для ускорения равна или превышает пороговое значение контроля, и не выполняется предаварийный контроль, даже когда выполнено заранее установленное условие начала контроля, в тех случаях, когда условие разрешения не было назначено в отношении момента времени, в который выполняется заранее установленное условие начала контроля, где условие разрешения состоит в том, что степень воздействия для ускорения равна или превышает первое пороговое значение степени воздействия, и скорость транспортного средства равна или меньше порогового значения скорости.
[0006] Автор изобретения обнаружил, что вероятность ошибочного нажатия на педаль, а это значит, что «водитель нажимает на педаль акселератора по ошибке, приняв ее за педаль тормоза», очень велика при запуске рассматриваемого транспортного средства. Так как рассматриваемое транспортное средство быстро ускоряется при ошибочном нажатии педали акселератора, водитель может далее нажимать педаль акселератора, приняв ее за педаль тормоза. Поэтому, когда педаль акселератора нажата по ошибке, очень велика вероятность, что степень воздействия на педаль акселератора равна или превышает первое пороговое значение степени воздействия, когда скорость транспортного средства равна или меньше порогового значения скорости. С другой стороны, когда водитель намеренно использует педаль акселератора при обгоне, опережении и т. п., велика вероятность того, что степень воздействия на педаль акселератора будет равной или больше первого порогового значения степени воздействия, но очень велика вероятность, что скорость транспортного средства в этой точке времени больше порогового значения скорости.
[0007] В вышеуказанной конфигурации при намеренном использовании водителем педали акселератора, где вероятно значительное нажатие на педаль акселератора, чтобы выполнить обгон, опережение и т. п., вероятность осуществления ненужного предаварийного контроля может быть снижена, и вероятность осуществления предаварийного контроля в случае ошибочного использования педали акселератора может быть увеличена.
[0008] В первом аспекте, когда установлено условие отмены разрешения, условие отмены разрешения состоит в том, что степень воздействия для ускорения становится меньше второго порогового значения степени воздействия, где второе пороговое значение степени воздействия равно или меньше первого порогового значения степени воздействия, блок осуществления предаварийного контроля может быть выполнен с возможностью не осуществлять предаварийный контроль, даже если заранее установленное условие начала контроля выполнено и установлено условие разрешения.
[0009] В первом аспекте блок осуществления предаварийного контроля может быть выполнен с возможностью повторного определения в заранее установленном цикле, установлено ли условия разрешения, и не выполнять предаварийный контроль, когда установлено условие отмены разрешения, в течение периода от момента времени, в которой условие разрешения устанавливается в первый раз, до момента времени, в которой заранее установленное условие начала контроля выполняется.
[0010] Когда водитель замечает свою ошибку нажатия на педаль акселератора, он уменьшает степень нажатия (степень воздействия) на педаль акселератора или отпускает педаль акселератора; таким образом, велика вероятность того, что степень воздействия для ускорения будет уменьшена до значения, меньше второго порогового значения степени воздействия. Соответственно, когда степень воздействия для ускорения становится меньше второго порогового значения степени воздействия, можно считать, что ошибка нажатия педали устранена. Т. е., когда установлено условие отмены разрешения того, что степень воздействия для ускорения уменьшена до значения, меньше второго порогового значения степени воздействия, ко времени выполнения условия начала контроля, операция ускорения в то время, когда выполнено условие начала контроля, считается операцией, соответствующей намерению водителя. При вышеуказанной конфигурации вероятность выполнения ненужного предаварийного контроля может быть снижена.
[0011] В первом аспекте блок осуществления предаварийного контроля может быть сконфигурирован так чтобы: рассчитать в качестве значения индекса столкновения корреляционное значение вероятности столкновения, которое уменьшается, поскольку вероятность столкновения между преградой и заявленным транспортным средством увеличивается каждый раз по истечении заранее установленного времени; определить, что условие отмены разрешения установлено, если корреляционное значение вероятности столкновения, рассчитанное в заданный момент времени, больше корреляционного значения вероятности столкновения, рассчитанного в момент времени, ранее предустановленного времени, чем заданный момент времени, в случае, когда установлено условие разрешения; и не выполнять предаварийный контроль, когда установлено условие отмены разрешения, даже когда выполнено заранее установленное условие начала контроля и установлено условие разрешения.
[0012] В первом аспекте блок осуществления предаварийного контроля может быть выполнен с возможностью повторного определения в заранее установленном цикле, установлено ли условия разрешения, и не выполнять предаварийный контроль, когда установлено условие отмены разрешения, в течение периода от точки времени, в которой условие разрешения устанавливается в первый раз, до точки времени, в которой заранее установленное условие начала контроля выполняется.
[0013] Например, когда скорость транспортного средства низкая, водитель может избежать препятствия, находящегося перед транспортным средством, за счет рулевого управления, намеренно нажимая педаль акселератора в значительной степени, чтобы ускорить рассматриваемое транспортное средство. В этом случае, так как может быть установлено условие разрешения, может быть осуществлен ненужный предаварийный контроль, когда установлены условия для предаварийного контроля. Однако, если препятствия удалось избежать посредством рулевого управления, корреляционное значение вероятности столкновения в текущем цикле становится больше корреляционного значения вероятности столкновения в последнем цикле. При вышеуказанной конфигурации вероятность выполнения ненужного предаварийного контроля может быть снижена.
[0014] В первом аспекте блок осуществления предаварийного контроля может быть выполнен с возможностью: расчета в качестве значения индекса столкновения уменьшенного корреляционного значения вероятности столкновения при увеличении вероятности столкновения между преградой и заявленным транспортным средством, заранее установленное значение индекса выбирают из множества условий значения индекса, заранее установленное условие начала контроля выбирают из множества условий начала контроля, и параметр предаварийного контроля выбирают из множества параметров предаварийного контроля; определения того, что установлено первое условие посредством использования первого условия значения индекса как заранее установленного условия заданного значения, первое значение индекса является одним из множества условий значения индекса, когда корреляционное значение вероятности столкновения становится равным или меньше первого порогового значения определения; и осуществления контроля для генерирования предупреждения водителю рассматриваемого транспортного средства как из множества предупреждений предаварийного контроля, когда условие разрешения установлено моментом времени, в которой выполнено первое условие начала контроля, в случае, когда первое условие начала контроля выполнено; первое условие начала контроля является одним из множества условий начала контроля, первое условие начала контроля содержит в качестве обязательного условия то, что первое условие установлено за счет использования первого условия значения индекса как заранее установленного условия значения индекса, и что установлено второе условие.
[0015] При вышеуказанной конфигурации водитель может заметить ошибку нажатия педали акселератора, и может быть увеличена вероятность выполнения воздействия во избежание столкновения с преградой.
[0016] В первом аспекте блок осуществления предаварийного контроля может быть выполнен с возможностью: определения того, что установлено первое условие посредством использования второго условия значения индекса как заранее установленного условия заданного значения, второе значение индекса является одним из множества условий заданного значения, когда корреляционное значение вероятности столкновения становится равным или меньше второго порогового значения определения, второе пороговое значение определения меньше первого порогового значения определения; и осуществления как одного из множества состояний предаварийного контроля, контроля торможения для применения силы торможения к рассматриваемому транспортному средству при замедлении преграды, рассчитанном на основе информации о преграде, когда условие разрешения установлено моментом времени, в который выполнено второе условие начала контроля, в случае, когда второе условие начала контроля выполнено, второе условие начала контроля является одним из множества условий начала контроля, второе условие начала контроля содержит в качестве обязательного условия то, что первое условие установлено за счет использования второго условия значения индекса как заранее установленного условия значения индекса, и что установлено второе условие.
[0017] При данной конфигурации может быть увеличена вероятность предотвращения столкновения с преградой, даже если водитель не замечает ошибку в нажатии педали.
[0018] Второй аспект изобретения предлагает систему помощи при вождении. Система помощи при вождении содержит: блок обнаружения преграды, выполненный с возможностью обнаружения преграды рядом с рассматриваемым транспортным средством; блок определения степени нажатия, выполненный с возможностью получения степени воздействия для ускорения, относящейся к степени воздействия водителем рассматриваемого транспортного средства; блок определения скорости, выполненный с возможностью определения скорости транспортного средства, скорость транспортного средства является скоростью рассматриваемого транспортного средства; и блок осуществления предаварийного контроля, выполненный с возможностью выполнения предаварийного контроля для предотвращения столкновения с преградой на основе скорости транспортного средства в момент времени, в который степень воздействия для ускорения становится равной или больше первого порогового значения степени воздействия .
[0019] В вышеуказанной конфигурации можно снизить вероятность выполнения ненужного предаварийного контроля в момент намеренного воздействия водителем в степени воздействия, соответствующей степени воздействия для ускорения, и увеличить вероятность осуществления предаварийного контроля в момент ошибки воздействии водителя в отношении степени воздействия.
[0020] Во втором аспекте блок осуществления предаварийного контроля может быть выполнен с возможностью осуществления предаварийного контроля, когда скорость транспортного средства в момент времени, в который степень воздействия для ускорения становится равной или больше первого порогового значения степени воздействия, равна или меньше порогового значения скорости, и вероятность столкновения преграды и рассматриваемого транспортного средства определяется как большая, чем пороговое значение столкновения; и блок осуществления предаварийного контроля может быть выполнен с возможностью не выполнять предаварийный контроль, даже когда вероятность столкновения преграды и рассматриваемого транспортного средства определяется как большая, чем пороговое значение столкновения, в случае, когда скорость транспортного средства в момент времени, в который степень воздействия для ускорения становится равной или больше первого порогового значения степени воздействия, больше порогового значения скорости.
[0021] При такой конфигурации в момент намеренного воздействия водителя в отношении степени воздействия, соответствующей степени воздействия для ускорения, может быть снижена вероятность осуществления ненужного предаварийного контроля. Кроме того, при такой конфигурации во время ошибочного воздействия водителя в отношении степени воздействия может быть увеличена вероятность осуществления предаварийного контроля.
[0022] Во втором аспекте блок осуществления предаварийного контроля может быть выполнен с возможностью не выполнять предаварийный контроль, когда степень воздействия для ускорения становится меньше второго порогового значения степени воздействия, второе пороговое значение степени воздействия равно или меньше первого порогового значения степени воздействия в течение периода от момента времени, в который скорость транспортного средства в момент времени, в который степень воздействия для ускорения становится равной или больше первого порогового значения степени воздействия, равна или меньше порогового значения скорости, до момента времени, в который вероятность столкновения преграды и рассматриваемого транспортного средства определяют как большую, чем пороговое значение столкновения.
[0023] При вышеуказанной конфигурации может быть снижена вероятность выполнения ненужного предаварийного контроля после устранения ошибки воздействия.
[0024] Следует понимать, что соответствующие составные элементы изобретения не ограничены элементами, указанными в примерах осуществления с присвоением наименований и/или номеров. Прочие аспекты, характеристики и сопутствующие преимущества будут доступно раскрыты в описаниях примеров осуществления настоящего изобретения на примерах следующих чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0025] Отличительные признаки, преимущества, техническая и промышленная значимость примеров осуществления настоящего изобретения раскрыты ниже со ссылкой на сопроводительные чертежи, в которых одинаковые обозначения относятся к одинаковым элементам, где:
фиг. 1 представляет собой общий вид конфигурации системы помощи при вождении в соответствии с одним из примеров осуществления изобретения;
фиг. 2 представляет собой изображение, полезное для пояснения размещения радиолокационной станции (РЛС) миллиметрового диапазона и прогнозируемого маршрута перемещения;
фиг. 3 представляет собой визуализацию краткого описания функционирования системы помощи при вождении, показанной на фиг. 1;
фиг. 4 представляет собой блок-схему, иллюстрирующую алгоритм, выполняемый центральным процессором электронного блока управления (ЦП ЭБУ) предаварийного контроля, показанного на фиг. 1; и
фиг. 5 представляет собой блок-схему, иллюстрирующую другой алгоритм, выполняемый ЦП ЭБУ предаварийного контроля, показанного на фиг. 1.
ДЕТАЛЬНОЕ РАСКРЫТИЕ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0026] Далее будет раскрыта система помощи при вождении (также называемая «система помощи») согласно одному примеру осуществления изобретения с использованием чертежей. Когда транспортное средство, в котором установлена система помощи, необходимо отличать от других транспортных средств, транспортное средство будет обозначено как «рассматриваемое транспортное средство (РТС)».
[0027] Система помощи осуществляет предаварийный контроль, если значение индекса столкновения, взаимосвязанное с «вероятностью столкновения с преградой, обнаруженной РЛС 20 миллиметрового диапазона, показанной на фиг. 1, и рассматриваемого транспортного средства РТС», удовлетворяет заранее установленному условию начала контроля. Предаварийный контроль, выполняемый системой помощи, включает управление аварийным сигналом, предварительное торможение и основное торможение. Управление аварийным сигналом осуществляется в первую очередь, предварительное торможение осуществляется во вторую очередь, и основное торможение осуществляется последним.
[0028] При управлении аварийным сигналом водитель информируется о том, что существует вероятность столкновения с преградой при помощи дисплея 30 (см. фиг. 1) и динамика 31 (см. фиг. 1). В частности, для водителя рассматриваемого транспортного средства генерируется предупреждение, чтобы предупредить водителя о возможности столкновения.
[0029] При предварительном торможении и основном торможении скорость Vs рассматриваемого транспортного средства РТС далее снижается за счет торможения, чтобы избежать столкновения с преградой и/или снизить скорость во время столкновения с преградой. Основное торможение отличается от предварительного торможения тем, что основное торможение осуществляется до тех пор, пока скорость Vs транспортного средства не станет равной нулю, и скорость Vs транспортного средства поддерживается равной нулю в течение заранее определенного периода времени после того, как скорость Vs транспортного средства станет равной нулю.
[0030] Как показано на фиг. 1, система помощи содержит ЭБУ 10 предаварийного контроля. ЭБУ 10 предаварийного контроля содержит микрокомпьютер, содержащий ЦП 11, ПЗУ 12, ОЗУ 13 и т. д. В данном описании изобретения ЭБУ является аббревиатурой для «электронного блока управления» и содержит микрокомпьютер как основную часть. Микрокомпьютер содержит ЦП и запоминающие устройства, например, ПЗУ и ОЗУ. ЦП внедряет различные функции посредством выполнения инструкций (программ, порядка), хранящихся в ПЗУ.
[0031] Система помощи дополнительно содержит РЛС 20 миллиметрового диапазона, датчик 21 положения акселератора, датчик 22 отклонения от заданного курса, датчики 23 скорости вращения колес, дисплей 30, динамик 31, ЭБУ 32 тормозной системы, датчик 33 торможения, тормозной механизм 34, ЭБУ 36 двигателя и исполнительный механизм 38 двигателя. ЭБУ 10 предаварийного контроля соединен с РЛС 20 миллиметрового диапазона, датчиком 21 положения акселератора, датчиком 22 отклонения от заданного курса, датчиками 23 скорости вращения колес, дисплеем 30, динамиком 31, ЭБУ 32 тормозной системы и ЭБУ 36 двигателя.
[0032] Как показано на фиг. 2, РЛС 20 миллиметрового диапазона предусмотрена в центральном положении передней части рассматриваемого транспортного средства РТС, если смотреть в направлении по ширине транспортного средства. РЛС 20 миллиметрового диапазона определяет положение преграды и скорость преграды относительно рассматриваемого транспортного средства РТС при помощи радиоволн в миллиметровом диапазоне (также называемых «миллиметровые волны»). В частности, РЛС 20 миллиметрового диапазона испускает (передает) миллиметровые волны и принимает миллиметровые волны (отраженные волны), отраженные преградой как твердым объектом, находящимся в пределах диапазона излучения миллиметровых волн. Затем РЛС 20 миллиметрового диапазона рассчитывает расстояние от рассматриваемого транспортного средства РТС до преграды на основе времени от передачи миллиметровых волн до их получения, а также рассчитывает азимутальное направление преграды, если смотреть от рассматриваемого транспортного средства РТС, на основе направления отраженных миллиметровых волн. Положение преграды относительно рассматриваемого транспортного средства РТС указано на основе расстояния от рассматриваемого транспортного средства РТС до преграды и азимутального курса преграды, если смотреть от рассматриваемого транспортного средства РТС.
[0033] Кроме того, РЛС 20 миллиметрового диапазона рассчитывает скорость преграды относительно рассматриваемого транспортного средства РТС. В частности, РЛС 20 миллиметрового диапазона рассчитывает скорость преграды относительно рассматриваемого транспортного средства РТС на основе изменения частоты отраженных миллиметровых волн (эффект Доплера). РЛС 20 миллиметрового диапазона отправляет информацию о преграде, содержащую положение преграды и относительную скорость преграды, на ЭБУ 10 предаварийного контроля.
[0034] Снова обращаясь к фиг. 1, датчик 21 положения акселератора определяет степень воздействия (степень нажатия) педали акселератора рассматриваемого транспортного средства и генерирует сигнал, представляющий степень AP воздействия на педаль акселератора (также называемой «степень воздействия для ускорения»). ЭБУ 10 предаварийного контроля получает (определяет) степень AP воздействия на педаль акселератора от датчика 21 положения акселератора каждый раз по окончании заранее установленного времени.
[0035] Датчик 22 отклонения от заданного курса определяет отклонение Yr от заданного курса, примененное к рассматриваемому транспортному средству РТС, и генерирует сигнал, представляющий отклонение Yr от заданного курса. ЭБУ 10 предаварийного контроля получает (определяет) отклонение от заданного курса от датчика 22 отклонения от заданного курса каждый раз по окончании заранее установленного времени.
[0036] Датчик 23 скорости вращения колес предусмотрен для каждого колеса рассматриваемого транспортного средства РТС и определяет заранее установленное количество импульсных сигналов (импульсных сигналов колес), генерируемых каждый раз, когда каждое колесо делает один оборот. Затем датчик 23 скорости вращения колеса отправляет определенный импульсный сигнал колеса на ЭБУ 10 предаварийного контроля. ЭБУ 10 предаварийного контроля рассчитывает скорость вращения (скорость колеса) каждого колеса на основе количества импульсов на единицу времени в импульсном сигнале колеса, передаваемом от каждого датчика 23 скорости вращения колеса, и рассчитывает скорость Vs транспортного средства, отражающую скорость рассматриваемого транспортного средства РТС на основе скорости вращения каждого колеса. Например, скорость Vs транспортного средства является средним значением скоростей четырех колес.
[0037] Дисплей 30 является индикатором на лобовом стекле (обозначенным как «HUD» - head-up display), получающим информацию для отображения от различных ЭБУ и навигационной системы в рассматриваемом транспортном средстве РТС, и отображает информацию в зоне (зоне отображения), являющейся частью лобового стекла рассматриваемого транспортного средства РТС. На дисплее 30 отображается экран, требующий привлечения внимания водителя к «препятствию как преграде с высокой вероятностью столкновения с рассматриваемым транспортным средством РТС среди преград, обнаруженных РЛС 20 миллиметрового диапазона». Дисплей 30 отображает экран, требующий внимания, когда получает информацию команды отображения как команду для отображения экрана, требующего внимания, от ЭБУ 10 предаварийного контроля. Дисплей 30 может быть жидкокристаллическим дисплеем.
[0038] Когда динамик 31 получает информацию команды вывода как команду для вывода сигнала предупреждения от ЭБУ 10 предаварийного контроля, динамик 31 генерирует «предупреждение, требующее внимания водителя» к препятствию, в ответ на полученную информацию выходной команды.
[0039] ЭБУ 32 тормозной системы соединен с датчиками 23 скорости колес и датчиком 33 торможения и получает сигналы измерения от данных датчиков. Датчик 33 торможения определяет параметры, использованные при контроле системы торможения (не показана), установленной в рассматриваемом транспортном средстве РТС, и, например, содержит датчик для определения степени воздействия (степени нажатия) на педаль тормоза.
[0040] Кроме того, ЭБУ 32 тормозной системы соединен с тормозным механизмом 34. Тормозной механизм 34 имеет гидравлическое управление. Тормозной механизм 34 размещен в гидравлической цепи (не показана) между главным цилиндром (не показан), сжимающим гидравлическую жидкость в соответствии с усилием, прилагаемым к педали тормоза, и устройством фрикционного тормоза (не показан), содержащим известный колесный цилиндр, предусмотренный в каждом колесе. Тормозной механизм 34 регулирует гидравлическое давление, передаваемое к колесному цилиндру. ЭБУ 32 тормозной системы приводит в действие тормозной механизм 34 так, чтобы отрегулировать тормозное усилие (ускорение (отрицательное ускорение или замедление) рассматриваемого транспортного средства РТС), приложенное к каждому колесу.
[0041] Когда ЭБУ 32 тормозной системы получает сигнал команды торможения от ЭБУ 10 предаварийного контроля, он управляет тормозным механизмом 34 чтобы снизить скорость Vs транспортного средства за счет торможения так, что фактическое ускорение рассматриваемого транспортного средства становится равным замедлению TG преграды, содержащемуся в сигнале команды торможения. ЭБУ 10 предаварийного контроля получает фактическое ускорение рассматриваемого транспортного средства РТС на основе степени изменения скорости Vs транспортного средства в единицу времени.
[0042] ЭБУ 36 двигателя соединен с исполнительным механизмом 38 двигателя. Исполнительный механизм 38 двигателя является исполнительным механизмом для изменения рабочего состояния двигателя внутреннего сгорания (не показан) как источника энергии рассматриваемого транспортного средства РТС и содержит как минимум привод дроссельной заслонки, изменяющий степень открытия дроссельной заслонки. ЭБУ 36 двигателя может изменять крутящий момент, сгенерированный двигателем внутреннего сгорания, приводя в действие исполнительный механизм 38 двигателя, тем самым он может управлять выходной мощностью рассматриваемого транспортного средства РТС. Когда сигнал команды торможения передается от ЭБУ 10 предаварийного контроля на ЭБУ 32 тормозной системы, сигнал команды снижения крутящего момента передается от ЭБУ 10 предаварийного контроля на ЭБУ 36 двигателя. Когда ЭБУ 36 двигателя получает сигнал команды снижения крутящего момента, он приводит в действие исполнительный механизм 38 двигателя (фактически, приводит в действие привод дроссельной заслонки для изменения степени открытия дроссельной заслонки до минимальной), чтобы изменить крутящий момент двигателя внутреннего сгорания до минимального.
Краткое изложение работы устройства
[0043] Далее будет раскрыта сущность работы системы помощи. Система помощи выявляет преграды, считающиеся обладающими вероятностью столкновения с рассматриваемым транспортным средством РТС, как препятствия из преград, обнаруженных РЛС 20 миллиметрового диапазона. Затем система помощи рассчитывает искомое время до столкновения (TTC) (TTC - Time To Collision), отображающее промежуток времени до столкновения каждого препятствия с рассматриваемым транспортным средством РТС с учетом каждого препятствия.
[0044] В случае, когда степень AP воздействия на педаль акселератора меньше порогового значения APcth для управления (например, значения, соответствующего 90% от максимальной степени воздействия на педаль акселератора), система помощи осуществляет предаварийный контроль, когда искомое время до столкновения ТТС равно или меньше порогового значения T(n)th времени, и не осуществляет предаварийный контроль, когда искомое время до столкновения ТТС больше порогового значения T(n)th времени.
[0045] С другой стороны, в случае, когда степень AP воздействия на педаль акселератора равна или больше порогового значения APcth для управления, система помощи также осуществляет предаварийный контроль, когда искомое время до столкновения ТТС равно или меньше порогового значения T(n)th времени. Однако система помощи определяет, установлено ли условие разрешения. Условие разрешение установлено, когда происходит «ошибочное нажатие на педаль», т.е., когда педаль акселератора выжата по ошибке вместо педали тормоза. Затем, когда степень AP воздействия на педаль акселератора равна или больше порогового значения APcth для управления, и искомое время до столкновения ТТС равно или меньше порогового значения T(n)th времени, система помощи осуществляет предаварийный контроль, если к этому времени установлено условие разрешения, и не осуществляет предаварийный контроль, если условие разрешения не установлено к этому времени. Условие разрешения установлено, когда «степень AP воздействия на педаль акселератора равна или больше первого порогового значения AP1th степени воздействия (например, 90% степени воздействия на педаль акселератора), и скорость Vs транспортного средства равна или меньше порогового значения V1th скорости (например, 15 км/ч)».
[0046] Когда степень AP воздействия на педаль акселератора равна или больше порогового значения APcth для управления, педаль акселератора находится в состоянии, когда она в значительной степени выжата за счет намеренного воздействия водителя или ошибочного нажатия педали. Таким образом, когда степень AP воздействия на педаль акселератора равна или больше порогового значения APcth для управления и искомое время до столкновения ТТС становится равным или меньшим, чем пороговое значение T(n)th времени, система помощи определяет, вызвано ли значительное нажатие на педаль акселератора намеренным действием водителя или ошибочным нажатием педали, в зависимости от того, существует ли история установки условия разрешения. В частности, если условие разрешения не установлено ко времени, когда степень AP воздействия на педаль акселератора равна или больше порогового значения APcth для управления, и искомое время до столкновения ТТС становится равным или меньшим, чем пороговое значение T(n)th времени, система помощи рассматривает нажатие на педаль акселератора как вызванное намеренным действием водителя и не осуществляет предаварийный контроль. С другой стороны, если условие разрешения установлено ко времени, когда степень AP воздействия на педаль акселератора равна или больше порогового значения APcth для управления, и искомое время до столкновения ТТС становится равным или меньшим, чем пороговое значение T(n)th времени, система помощи рассматривает нажатие на педаль акселератора как ошибочное и осуществляет предаварийный контроль.
[0047] Таким образом, предаварийный контроль может быть осуществлен без сбоев, когда происходит ошибочное нажатие на педаль, и можно предотвратить ситуацию, где «ненужный предаварийный контроль осуществляется, когда не производится ошибочное нажатие на педаль, и водитель недоволен контролем».
[0048] Так как ошибочное нажатие на педаль вероятно при запуске рассматриваемого транспортного средства РТС, его вероятность велика, когда скорость Vs транспортного средства низкая (т. е. когда скорость Vs транспортного средства равна или меньше порогового значения V1th скорости). Когда происходит ошибочное нажатие на педаль, т.е., когда педаль акселератора выжата по ошибке, рассматриваемое транспортное средство РТС быстро ускоряется. Соответственно, высока вероятность того, что водитель немедленно нажмет педаль акселератора, приняв ее за педаль тормоза, чтобы замедлить рассматриваемое транспортное средство РТС. Поэтому, в случае ошибочного нажатия педали велика вероятность того, что степень AP воздействия на педаль акселератора будет равной или больше первого порогового значения AP1th степени воздействия, когда рассматриваемое транспортное средство РТС перемещается с относительно низкой скоростью (т. е., когда скорость Vs транспортного средства равна или меньше порогового значения V1th скорости). Соответственно, система помощи определяет, что условие разрешения установлено, когда «степень AP воздействия на педаль акселератора равна или больше первого порогового значения AP1th степени воздействия, и скорость Vs транспортного средства равна или меньше порогового значения V1th скорости».
[0049] С другой стороны, когда рассматриваемое транспортное средство РТС обгоняет или опережает транспортное средство впереди, также велика вероятность того, что степень воздействия на педаль акселератора будет равна или больше первого порогового значения AP1th степени воздействия. Однако обгон, опережение и т. п. обычно производится, когда скорость Vs транспортного средства относительно высокая; поэтому велика вероятность того, что скорость Vs транспортного средства равна или больше порогового значения V1th скорости в то время, когда степень AP воздействия на педаль акселератора становится равной или больше первого порогового значения AP1th степени воздействия. Соответственно, система помощи может определить, что условие разрешения не установлено, когда осуществляется обгон, опережение и т. п. Поэтому система помощи может снизить вероятность того, что ненужный предаварийный контроль будет осуществляться во время намеренного воздействия водителя на педаль акселератора.
[0050] При обгоне, опережении и т. п. увеличивается степень воздействия на педаль акселератора и увеличивается скорость нажатия педали акселератора. Связанная система определяет, происходит ли ошибочное нажатие на педаль на основе степени нажатия и скорости нажатия педали акселератора. Поэтому велика вероятность того, что связанная система ошибочно примет обгон, опережение и т. п. за ошибочное нажатие на педаль и выполнит ненужный предаварийный контроль в то время, когда производится обгон, опережение и т. п.
[0051] Работа системы помощи, раскрытой выше, также может быть описана следующим образом. Т. е., когда степень AP воздействия на педаль акселератора равна или больше порогового значения APcth для управления, и искомое время до столкновения ТТС равно или меньше порогового значения T(n)th времени, система помощи определяет, что заранее установленное условие начала контроля выполнено. Затем, если условие разрешения установлено к тому времени, когда выполнено условие начала контроля, система помощи определяет, что должен быть выполнен предаварийный контроль, так как велика вероятность того, что рассматриваемое транспортное средство РТС столкнется с препятствием в связи с ошибочным нажатием педали, и осуществляет предаварийный контроль. С другой стороны, если условие разрешения не установлено к тому времени, когда выполнено условие начала контроля, система помощи определяет, что предаварийный контроль не следует выполнять, так как повышенная вероятность столкновения с препятствием вызвана намеренным воздействием водителя на педаль акселератора, и система не осуществляет предаварийный контроль.
[0052] Пороговое значение времени T(n)th установлено заранее для каждого из трех типов предаварийного контроля согласно раскрытому выше, и его выбирают из порогового значения времени T1th, порогового значения времени T2th и порогового значения времени T3th. Пороговое значение времени T1th — это пороговое значение для управления предупреждением, пороговое значение времени T2th — это пороговое значение для предварительного торможения, в то время как пороговое значение времени T3th — это пороговое значение для основного торможения. Пороговое значение времени T1th является наибольшим значением, пороговое значение времени T2th является вторым наибольшим значением, в то время как пороговое значение времени T3th является наименьшим значением.
[0053] Работа системы помощи будет дополнительно раскрыта со ссылкой на пример на фиг. 3. В этом примере водитель в значительной степени нажимает педаль акселератора, приняв ее за педаль тормоза, в момент времени ta. Таким образом, в момент времени ta степень AP воздействия на педаль акселератора увеличивается от значения, меньшего, чем первое пороговое значение AP1th степени воздействия, до значения, равного или большего чем первое пороговое значение AP1th степени воздействия.
[0054] В этом примере водитель не знает, что он нажимает педаль акселератора, приняв ее за педаль тормоза. Таким образом, водитель далее нажимает педаль акселератора, и степень AP воздействия на педаль акселератора равна или больше «порогового значения APcth для управления, установленного равным первому пороговому значению AP1th воздействия», в период от момента времени ta до момента времени td. Соответственно, в период от момента времени ta до момента времени td степень AP воздействия на педаль акселератора не становится меньше «второго порогового значения AP2th степени воздействия, установленного равным или меньшим чем первое пороговое значение AP1th степени воздействия».
[0055] Скорость Vs транспортного средства (также называемая «скорость Vs1 транспортного средства во время воздействия») в «момент времени ta, в который степень AP воздействия на педаль акселератора становится равной первому пороговому значению AP1th степени воздействия » равна или меньше порогового значения V1th скорости. Соответственно, система помощи определяет, что условие разрешения установлено в момент времени ta, и устанавливает значение флага PF разрешение на 1.
[0056] Если значение флага PF разрешения установлено на 0, это означает, что условие разрешения не было установлено. Если значение установлено на 1, это означает, что условие разрешения было установлено ранее. Как будет раскрыто далее, когда степень AP воздействия на педаль акселератора становится меньше второго порогового значения AP2th степени воздействия, система помощи определяет, что установлено условие отмены разрешения, и устанавливает значение флага PF разрешения на 0.
[0057] Как раскрыто выше, в этом примере степень AP воздействия на педаль акселератора не становится меньше второго порогового значения AP2th степени воздействия в период от момента времени ta до момента времени td. Таким образом, значение флага PF разрешения не возвращается к 0 в период от момента времени ta до момента времени td.
[0058] В момент времени tb искомое время до столкновения ТТС уменьшается от значения, большего, чем пороговое значение времени T1th, до значения, равного или меньшего чем пороговое значение времени T1th, для управления предупреждением. Соответственно, в момент времени tb искомое время до столкновения равно или меньше порогового значения времени T1th и степень воздействия на педаль акселератора равна или больше порогового значения APcth для управления; таким образом, установлено условие начала контроля для управления аварийным сигналом (также называемое «первое условие начала контроля»). Кроме того, условие разрешения устанавливается в момент времени ta до момента времени tb, и степень AP воздействия на педаль акселератора не становится меньше второго порогового значения AP2th степени воздействия; таким образом, условие отмены разрешения не устанавливается до момента времени tb. Таким образом, в момент времени tb система помощи осуществляет управление аварийным сигналом как предаварийный контроль.
[0059] В момент времени tc искомое время до столкновения ТТС уменьшается от значения, большего, чем временное пороговое значение T2th, до значения, равного или меньшего чем временное пороговое значение T2th, для предварительного торможения. Соответственно, в момент времени tc искомое время до столкновения равно или меньше временного порогового значения T2th и степень воздействия на педаль акселератора равна или больше порогового значения APcth для управления; таким образом, установлено условие начала контроля для предварительного торможения (также называемое «второе условие начала контроля»). Кроме того, условие разрешения устанавливается в момент времени ta до момента времени tc, и условие отмены разрешения не устанавливается до момента времени tc. Таким образом, в момент времени tc система помощи осуществляет предварительное торможение как предаварийный контроль.
[0060] При предварительном торможении, когда искомое время до столкновения ТТС равно или меньше временного порогового значения T2th и больше «временного порогового значения T2th’, меньшего чем временное пороговое значение T2th», торможение осуществляется при замедлении преграды TG1. Кроме того, когда искомое время до столкновения ТТС равно или меньше временного порогового значения T2th’ и больше временного порогового значения T3th, торможение осуществляется при замедлении преграды TG2, большем чем замедление преграды TG1, и осуществляется более быстрое замедление.
[0061] В момент времени, когда искомое время до столкновения ТТС становится равным или меньше временного порогового значения T2th, система помощи рассчитывает замедление преграды TG1 на основе расстояния между рассматриваемым транспортным средством РТС и преградой, а также скорость преграды относительно рассматриваемого транспортного средства РТС в данный момент времени. Затем система помощи замедляет рассматриваемое транспортное средство РТС при рассчитанном замедлении преграды TG1 до тех пор, пока искомое время до столкновения ТТС не станет равным или меньшим чем временное пороговое значение T2th’. В момент времени, когда искомое время до столкновения ТТС становится равным или меньше временного порогового значения T2th’, система помощи рассчитывает замедление преграды TG2 на основе расстояния между рассматриваемым транспортным средством РТС и преградой, а также скорость преграды относительно рассматриваемого транспортного средства РТС в данный момент времени.
[0062] В момент времени td искомое время до столкновения ТТС уменьшается от значения, большего чем временное пороговое значение T3th, до значения, равного или меньшего чем временное пороговое значение T3th, для основного торможения. Соответственно, в момент времени td искомое время до столкновения равно или меньше временного порогового значения T3th и степень воздействия на педаль акселератора равна или больше порогового значения APcth для управления; таким образом, установлено условие начала контроля для основного торможения. Кроме того, условие разрешения устанавливается в момент времени ta до момента времени td, и условие отмены разрешения не устанавливается в период от момента времени ta до момента времени td. Таким образом, в момент времени td система помощи осуществляет основное торможение как предаварийный контроль.
[0063] При основном торможении торможение осуществляется при вышеуказанном замедлении преграды TG2 до тех пор, пока скорость Vs транспортного средства не станет равной нулю (пока рассматриваемое транспортное средство РТС не остановится). В момент времени te скорость Vs транспортного средства становится равной нулю, и рассматриваемое транспортное средство РТС останавливается. При основном торможении после того, как скорость Vs транспортного средства становится равной нулю (после того, как рассматриваемое транспортное средство РТС остановится), замедление преграды устанавливается как замедление преграды TG1 так, что скорость Vs транспортного средства остается равной нулю в течение заранее установленного периода времени. В это время рассматриваемое транспортное средство РТС не может быть замедлено при замедлении преграды TG1, так как оно остановлено: таким образом, ЭБУ 32 тормозной системы определяет, что тормозного усилия недостаточно, и приводит в действие тормозной механизм 34, чтобы поддерживать тормозной механизм 34 в работе.
[0064] Как становится понятно из примера выше, в случае, когда установлено «условие начала контроля, что искомое время до столкновения ТТС равно или меньше временного порогового значения T(n)th, и что степень AP воздействия на педаль акселератора равна или больше порогового значения APcth для управления», система помощи осуществляет предаварийный контроль, когда условие разрешения было установлено ко времени, когда установлено условие начала контроля, и не осуществляет предаварийный контроль, когда условие разрешения не было установлено ко времени, когда установлено условие начала контроля. Таким образом, можно снизить вероятность выполнения ненужного предаварийного контроля в момент намеренного воздействия водителя, такой как обгон и опережение, увеличивая вероятность выполнения предаварийного контроля, когда происходит ошибочное нажатие на педаль.
Специфическое функционирование
[0065] ЦП 11 ЭБУ 10 предаварийного контроля выполняет алгоритм, показанный на блок-схеме на фиг. 4, каждый раз по окончании заранее установленного времени. Алгоритм, показанный на фиг. 4, предусмотрен для определения того, установлено ли условие разрешения, когда условие разрешения не было установлено, и определения того, установлено ли условие отмены разрешения, когда условие разрешения установлено.
[0066] ЦП 11 начинает обработку с шага 400 на фиг. 4 в нужное время и переходит на шаг 405, чтобы получить текущую степень AP воздействия на педаль акселератора от датчика 21 положения акселератора. ЦП 11 затем переходит на шаг 410, чтобы получить скорость Vs транспортного средства рассматриваемого транспортного средства РТС на основе импульсных сигналов, переданных датчиками 23 скорости вращения колес, и переходит на шаг 415.
[0067] На шаге 415 ЦП 11 определяет, установлено ли значение флага PF разрешения на 0. Значение флага PF разрешения установлено на 0 в начальном состоянии (т. е. в то время, когда ключ замка зажигания (не показан) рассматриваемого транспортного средства поворачивают из положения ВЫКЛ. в положение ВКЛ.).
[0068] Когда значение флага PF разрешения установлено на 0, ЦП 11 принимает положительное решение (ДА) на шаге 415 и переходит на шаг 420. На шаге 420 ЦП 11 определяет, является ли степень AP воздействия на педаль акселератора, полученная на шаге 405, равной или большей чем первое пороговое значение AP1th степени воздействия. Первое пороговое значение AP1th степени воздействия установлено на 90%.
[0069] Когда степень AP воздействия на педаль акселератора меньше чем первое пороговое значение AP1th степени воздействия, ЦП 11 принимает отрицательное решение (НЕТ) на шаге 420 и переходит на шаг 495, чтобы завершить алгоритм. В результате условие разрешения не установлено, и значение флага PF разрешения не изменено с 0.
[0070] С другой стороны, когда степень AP воздействия на педаль акселератора равна или больше чем первое пороговое значение AP1th степени воздействия, ЦП 11 принимает положительное решение (ДА) на шаге 420 и переходит на шаг 425. На шаге 425 ЦП 11 определяет, является ли скорость Vs транспортного средства, полученная на шаге 410, равной или меньшей чем пороговое значение V1th скорости. Пороговое значение V1th скорости установлено равным 15 км/ч.
[0071] Когда скорость Vs транспортного средства больше порогового значения V1th скорости, ЦП 11 принимает отрицательное решение (НЕТ) на шаге 425 и переходит на шаг 495, чтобы завершить алгоритм. В результате условие разрешения не установлено, и значение флага PF разрешения не изменено с «нуля».
[0072] С другой стороны, когда скорость Vs транспортного средства равна или меньше порогового значения V1th скорости, ЦП 11 принимает положительное решение (ДА) на шаге 425 и переходит на шаг 430. На шаге 430 ЦП 11 определяет, что условие разрешения установлено, и устанавливает значение флага PF разрешения на 1. Затем ЦП 11 переходит на шаг 495, чтобы завершить алгоритм. В результате, значение флага PF разрешения изменяется с 0 на 1.
[0073] С другой стороны, когда значение флага PF разрешения не равно 0 в то время, когда ЦП 11 выполняет шаг 415 (т. е., когда значение флага PF разрешения равно 1 и установлено условие разрешения), ЦП 11 принимает отрицательное решение «НЕТ» на шаге 415 и переходит на шаг 435. На шаге 435 ЦП 11 определяет, является ли степень AP воздействия на педаль акселератора, полученная на шаге 405, меньше второго порогового значения AP2th степени воздействия. Второе пороговое значение AP2th степени воздействия установлено на 70%.
[0074] Когда степень AP воздействия на педаль акселератора равна или больше второго порогового значения AP2th степени воздействия, ЦП 11 принимает отрицательное решение (НЕТ) на шаге 435 и переходит на шаг 495, чтобы завершить алгоритм. В результате условие отмены разрешения не установлено, и значение флага PF разрешения не изменено с 1.
[0075] С другой стороны, когда степень AP воздействия на педаль акселератора становится меньше второго порогового значения AP2th степени воздействия, ЦП 11 принимает положительное решение (ДА) на шаге 435 и переходит на шаг 440. На шаге 440 ЦП 11 определяет, что условие отмены разрешения установлено, и устанавливает значение флага PF разрешения на 0. Затем ЦП 11 переходит на шаг 495, чтобы завершить алгоритм. В результате, значение флага PF разрешения изменяется с 1 на 0.
[0076] Как становится понятно из раскрытия выше, когда степень AP воздействия на педаль акселератора равна или больше первого порогового значения AP1th степени воздействия, и скорость Vs транспортного средства равна или меньше порогового значения V1th скорости, определяется, что условие разрешения установлено, и значение флага PF разрешения устанавливается на 1. Таким образом, осуществление предаварийного контроля которое исполняется в случае, когда степень AP воздействия на педаль акселератора равна или больше порогового значения APcth для управления, разрешено, как будет раскрыто ниже. Таким образом, вероятность разрешения осуществления предаварийного контроля без сбоя во время ошибочного нажатия педали может быть увеличена. Кроме того, когда степень AP воздействия на педаль акселератора становится меньше второго порогового значения AP2th степени воздействия после того, как условие разрешения однажды установлено (т. е. после того как значение флага PF разрешения установлено на 1), определяется, что установлено условие отмены разрешения, и значение флага PF разрешения устанавливается на 0. Таким образом, осуществление предаварийного контроля в случае, когда степень AP воздействия на педаль акселератора равна или больше порогового значения APcth для управления, запрещено, как будет раскрыто ниже. Таким образом, можно предотвратить осуществление ненужного предаварийного контроля, если однажды произошло ошибочное нажатие на педаль, и затем ошибка нажатия педали была устранена.
[0077] Кроме того, ЦП 11 ЭБУ 10 предаварийного контроля выполняет алгоритм, показанный на блок-схеме на фиг. 5, каждый раз по окончании заранее установленного времени. Алгоритм, показанный на фиг. 5, предусмотрен для определения того, разрешено ли осуществление предаварийного контроля.
[0078] ЦП 11 начинает обработку с шага 500 на фиг. 5 в нужное время, выполняет шаги с 501 по 510 в порядке, раскрытом ниже, и переходит на шаг 512.
[0079] На шаге 501 ЦП 11 получает текущую степень AP воздействия на педаль акселератора от датчика 21 положения акселератора. На шаге 502 ЦП 11 получает информацию о преграде от РЛС 20 миллиметрового диапазона. На шаге 504 ЦП 11 получает скорость Vs транспортного средства рассматриваемого транспортного средства РТС на основе импульсных сигналов от датчиков 23 скорости вращения колес. На шаге 506 ЦП 11 получает скорость Yr изменения заданного курса, примененную к рассматриваемому транспортному средству РТС от датчика 22 отклонения от заданного курса.
[0080] На шаге 508 ЦП 11 рассчитывает спрогнозированный маршрут RCR перемещения (см. фиг. 2) рассматриваемого транспортного средства РТС. Операция на шаге 508 будет подробно раскрыта. ЦП 11 рассчитывает радиус поворота рассматриваемого транспортного средства РТС на основе скорости Vs транспортного средства, полученной на шаге 504, и скорости Yr изменения заданного курса, полученной на шаге 506. Затем ЦП 11 оценивает маршрут перемещения, для которого центральной точкой в направлении по ширине рассматриваемого транспортного средства РТС (фактически центральная точка PO (см. фиг. 2) на оси правого и левого переднего колеса рассматриваемого транспортного средства РТС) является головка, как спрогнозированный маршрут RCR перемещения на основе рассчитанного радиуса поворота. Когда появляется скорость Yr изменения заданного курса, система помощи оценивает дугообразный маршрут как спрогнозированный маршрут RCR перемещения. С другой стороны, когда скорость Yr изменения заданного курса равна нулю, система помощи оценивает прямой маршрут, идущий в направлении ускорения, примененного к рассматриваемому транспортному средству РТС, как спрогнозированный маршрут RCR перемещения.
[0081] На шаге 510 ЦП 11 выявляет характерные точки, выбранные из преград, обозначенных информацией о них, и которые предполагаются имеющими вероятность столкновения с рассматриваемым транспортным средством РТС (включая характерные точки, для которых предполагается очень плотное приближение к рассматриваемому транспортному средству РТС, но не столкновение с рассматриваемым транспортным средством РТС), как препятствия на основе «положения и скорости каждой преграды» и спрогнозированного маршрута RCR перемещения рассматриваемого транспортного средства РТС.
[0082] Операция на шаге 510 будет подробно раскрыта со ссылкой на фиг. 2. ЦП 11 рассчитывает прогнозируемый маршрут LEC перемещения слева, проходящий через точку PL, расположенную дальше слева от левой части корпуса рассматриваемого транспортного средства РТС на расстоянии αL, и прогнозируемый маршрут REC перемещения справа, проходящий через точку PR, расположенную дальше справа от правой части корпуса рассматриваемого транспортного средства РТС на расстоянии αR, на основе «спрогнозированного маршрута RCR перемещения, имеющего конечную длину». Спрогнозированный маршрут LEC перемещения слева формируется посредством перемещения спрогнозированного маршрута RCR перемещения влево в поперечном направлении рассматриваемого транспортного средства РТС на «значение, полученное посредством суммирования половины (W/2) ширины W транспортного средства с расстоянием αL». Спрогнозированный маршрут REC перемещения справа формируется посредством перемещения спрогнозированного маршрута RCR перемещения вправо в поперечном направлении рассматриваемого транспортного средства РТС на «значение, полученное посредством суммирования половины (W/2) ширины W транспортного средства с расстоянием αR». Расстояние αL и расстояние αR равны нулю или превышают ноль и могут различаться или быть равны друг другу. Кроме того, ЦП 11 обозначает зону между спрогнозированным маршрутом LEC перемещения слева и спрогнозированным маршрутом REC перемещения справа как зону ECA спрогнозированного маршрута перемещения.
[0083] Затем ЦП 11 рассчитывает (оценивает) траекторию движения каждой преграды на основе прошлого положения преграды и рассчитывает направление движения преграды относительно рассматриваемого транспортного средства РТС на основе рассчитанной траектории движения преграды. Затем ЦП 11 выявляет преграды, которые уже существуют в зоне ECA спрогнозированного маршрута перемещения, и для которых спрогнозировано пересечение с зоной TA ведущего конца рассматриваемого транспортного средства РТС, и преграды, которые войдут в зону ECA спрогнозированного маршрута перемещения в будущем, и для которых спрогнозировано пересечение с зоной TA ведущего конца рассматриваемого транспортного средства РТС, как препятствия с вероятностью столкновения с рассматриваемым транспортным средством РТС на основе зоны ECA спрогнозированного маршрута перемещения, взаимосвязей (относительное положение и относительная скорость) между рассматриваемым транспортным средством РТС и каждой преградой и курса движения преграды относительно рассматриваемого транспортного средства РТС. Здесь зона TA ведущего конца рассматриваемого транспортного средства РТС является зоной, представленной сегментом, соединяющим точку PL и точку PR.
[0084] ЦП 11 оценивает спрогнозированный маршрут LEC перемещения слева как траекторию, по которой проходит точка PL, и оценивает спрогнозированный маршрут REC перемещения справа как траекторию, по которой проходит точка PR. Таким образом, если значение αL и значение αR являются положительными, ЦП 11 определяет преграда, обладающую вероятностью прохождения вблизи левой поверхности или правой поверхности рассматриваемого транспортного средства РТС, как «преграда, которая уже существует в зоне ECA спрогнозированного маршрута перемещения, и для которой прогнозируется пересечение с зоной TA передней кромки рассматриваемого транспортного средства РТС» или «преграда, которая войдет в зону ECA спрогнозированного маршрута перемещения в будущем, и для которой прогнозируется пересечение с зоной TA передней кромки рассматриваемого транспортного средства РТС». Соответственно, ЦП 11 выявляет преграда, обладающую вероятностью прохождения через левую сторону или правую сторону рассматриваемого транспортного средства РТС, как препятствие.
[0085] Затем ЦП 11 переходит на шаг 512 для определения того, установлено ли на 0 значение флага ABF основного торможения, который будет раскрыт ниже. Значение флага ABF основного торможения устанавливается на 1 в то время, когда начинается основное торможение, и устанавливается на 0 в то время, когда истекает заранее установленное время от момента времени, когда рассматриваемое транспортное средство РТС остановлено. Значение флага ABF основного торможения установлено на 0 в начальном состоянии (т. е. в то время, когда ключ замка зажигания рассматриваемого транспортного средства РТС поворачивают из положения ВЫКЛ. в положение ВКЛ.).
[0086] Когда значение флага ABF основного торможения установлено на 0, ЦП 11 принимает положительное решение (ДА) на шаге 512 и переходит на шаг 514, чтобы определить, были ли какие-либо препятствия выявлены на шаге 510. Если на шаге 510 препятствия не были выявлены, ЦП 11 принимает отрицательное решение (НЕТ) на шаге 514 и переходит на шаг 595, чтобы завершить алгоритм. В результате, предаварийный контроль не осуществляется.
[0087] С другой стороны, при выявлении препятствия на шаге 510 ЦП 11 принимает положительное решение (ДА) на шаге 514 и переходит на шаг 516, чтобы рассчитать искомое время до столкновения ТТС, отображающее продолжительность времени до того, как препятствие пересечет зону TA рассматриваемого транспортного средства РТС.
[0088] Здесь будет раскрыта операция расчета искомого времени до столкновения ТТС с препятствием. ЦП 11 рассчитывает искомое время до столкновения ТТС с препятствием посредством деления расстояния (относительного расстояния) между рассматриваемым транспортным средством РТС и препятствием на скорость препятствия относительно рассматриваемого транспортного средства РТС.
[0089] Искомое время до столкновения ТТС — это время T1 или время T2, раскрытое ниже. Время T1 — это период времени от текущей точки во времени до точки во времени, в которой прогнозируется столкновение препятствия с рассматриваемым транспортным средством РТС (период времени от текущего времени до прогнозируемого времени столкновения). Время T2 — это период времени от текущей точки во времени до точки во времени, в которой препятствие, обладающее вероятностью прохождения через одну из сторон рассматриваемого транспортного средства РТС, максимально сблизится с рассматриваемым транспортным средством РТС (период времени от текущего времени до прогнозируемого времени наибольшего сближения).
[0090] Искомое время до столкновения ТТС — это промежуток времени, который для препятствия занимает достижение «зоны TA передней кромки рассматриваемого транспортного средства РТС» в случае, когда предполагается, что препятствие и рассматриваемое транспортное средство РТС будут двигаться, поддерживая относительную скорость и относительное направление движения в текущей точке во времени.
[0091] Кроме того, искомое время до столкновения ТТС представляет промежуток времени, в пределах которого может быть осуществлен предаварийный контроль для подготовки к столкновению рассматриваемого транспортного средства РТС и препятствия или операция водителя по предотвращению столкновения. Кроме того, искомое время до столкновения ТТС — это значение индекса (значение индекса столкновения), взаимосвязанное с вероятностью (вероятностью столкновения), с которой препятствие и рассматриваемое транспортное средство РТС сталкиваются друг с другом. Искомое время до столкновения ТТС отображает высокую вероятность столкновения при его малом значении и низкую вероятность столкновения — при его высоком значении.
[0092] После выполнения шага 516 ЦП 11 переходит на шаг 517 для определения того, является ли степень AP воздействия на педаль акселератора, полученная на шаге 501, равной или большей чем пороговое значение APcth для управления. Пороговое значение APcth для управления установлено на 90%. Когда степень AP воздействия на педаль акселератора равна или больше чем пороговое значение APcth для управления, ЦП 11 принимает положительное решение (ДА) на шаге 517 и переходит на шаг 518.
[0093] На шаге 518 ЦП 11 определяет, установлено ли значение флага PF разрешения на 1. Если значение флага PF разрешения равно 0, ЦП 11 принимает отрицательное решение (НЕТ) на шаге 518 и переходит на шаг 595, чтобы завершить алгоритм. Отрицательное решение (НЕТ) принимается на шаге 518 в ситуации, когда степень AP воздействия на педаль акселератора в текущее время равна или больше порогового значения APcth для управления, но условие разрешения не установлено к текущему времени. В качестве одного примера данной ситуации педаль акселератора в значительной степени нажата, когда скорость Vs транспортного средства больше порогового значения V1th скорости, и степень воздействия педали акселератора становится равной или больше порогового значения APcth для управления. В этой ситуации очень велика вероятность намеренного выполнения воздействия водителем, например, обгона или опережения, таким образом, ЦП 11 не осуществляет предаварийный контроль, даже когда искомое время до столкновения ТТС равно или меньше порогового значения времени T(n)th. Соответственно, ЦП 11 завершает данный алгоритм без выполнения шагов (шаги с 520 по 532) для осуществления предаварийного контроля. В результате, предаварийный контроль не осуществляется.
[0094] С другой стороны, когда значение флага PF разрешения — 1, ЦП 11 принимает положительное решение (ДА) на шаге 518 и переходит на шаг 520. Когда степень AP воздействия на педаль акселератора равна или больше порогового значения APcth для управления, и значение флага PF разрешения — 1, условие разрешения установлено к текущей точке во времени, и велика вероятность того, что нажатие на педаль акселератора в текущее время является ошибочным. Таким образом, ЦП 11 осуществляет предаварийный контроль, когда искомое время до столкновения ТТС равно или меньше порогового значения времени T(n)th. Соответственно, на шаге 520 ЦП 11 определяет, является ли искомое время до столкновения ТТС, рассчитанное на шаге 516, равным или меньшим чем пороговое значение T1th времени для управления предупреждением.
[0095] Когда искомое время до столкновения ТТС больше порогового значения T1th времени, ЦП 11 принимает отрицательное решение (НЕТ) на шаге 520 и переходит на шаг 595, чтобы завершить алгоритм. В этом случае искомое время до столкновения ТТС больше порогового значения времени T1th как наибольшее значение среди пороговых значений времени T(n)th; таким образом, предаварийный контроль не осуществляется.
[0096] Когда искомое время до столкновения ТТС равно или меньше порогового значения времени T1th, ЦП 11 принимает положительное решение (ДА) на шаге 520 и переходит на шаг 522, чтобы определить, является ли искомое время до столкновения ТТС равным или меньшим чем пороговое значение времени T2th для предварительного торможения.
[0097] Когда искомое время до столкновения ТТС больше порогового значения времени T2th (т. е. когда искомое время до столкновения ТТС больше порогового значения времени T2th и равно или меньше порогового значения времени T1th), ЦП 11 принимает отрицательное решение (НЕТ) на шаге 522 и переходит на шаг 524. На шаге 524 ЦП 11 осуществляет управление аварийным сигналом (предупреждение) и переходит на шаг 595, чтобы завершить алгоритм. В частности, на шаге 524 ЦП 11 отправляет информацию команды отображения на дисплей 30 и вызывает отображение дисплеем 30 экрана, требующего внимания. Кроме того, на шаге 524 ЦП 11 отправляет информацию выходной команды на динамик 31 и вызывает генерирование динамиком 31 звука предупреждения.
[0098] С другой стороны, когда искомое время до столкновения ТТС равно или меньше порогового значения времени T2th, ЦП 11 принимает положительное решение (ДА) на шаге 522 и переходит на шаг 526, чтобы определить, является ли искомое время до столкновения ТТС равным или меньшим чем пороговое значение времени Т3th для основного торможения.
[0099] Когда искомое время до столкновения ТТС больше порогового значения T3th времени (т. е. когда искомое время до столкновения ТТС больше порогового значения T3th времени и равно или меньше порогового значения T2th времени), ЦП 11 принимает отрицательное решение (НЕТ) на шаге 526 и переходит на шаг 528. На шаге 528 ЦП 11 осуществляет предварительное торможение и переходит на шаг 595, чтобы завершить алгоритм. В частности, когда минимально искомое время до столкновения ТТС, рассчитанное на шаге 516, равно или меньше порогового значения времени T2th и больше порогового значения времени T2thꞌ, ЦП 11 отправляет сигнал команды торможения для замедления рассматриваемого транспортного средства РТС при замедлении TG1 преграды на ЭБУ 32 тормозной системы и отправляет сигнал команды снижения крутящего момента на ЭБУ 36 двигателя. С другой стороны, когда минимально искомое время до столкновения ТТС, рассчитанное на шаге 516, равно или меньше порогового значения времени T2thꞌ и больше порогового значения времени T3th, ЦП 11 отправляет сигнал команды торможения для замедления рассматриваемого транспортного средства РТС при замедлении TG2 преграды на ЭБУ 32 тормозной системы и отправляет сигнал команды снижения крутящего момента на ЭБУ 36 двигателя.
[0100] С другой стороны, когда искомое время до столкновения ТТС равно или меньше порогового значения T3th времени, ЦП 11 принимает положительное решение (ДА) на шаге 526 и переходит на шаг 530. На шаге 530 ЦП 11 устанавливает значение флага ABF основного торможения на 1 и переходит на шаг 532. На шаге 532 ЦП 11 осуществляет основное торможение и переходит на шаг 595, чтобы завершить алгоритм. В частности, ЦП 11 отправляет сигнал команды торможения для замедления рассматриваемого транспортного средства РТС при замедлении TG2 преграды на ЭБУ 32 тормозной системы и отправляет сигнал команды снижения крутящего момента на ЭБУ 36 двигателя.
[0101] После выполнения основного торможения оно продолжает выполняться до тех пор, пока скорость Vs не станет равной нулю, независимо от отсутствия или наличия препятствия и искомого времени до столкновения ТТС. Соответственно, в цикле данного алгоритма, выполняемого после того как значение флага ABF основного торможения будет установлено на 1 на шаге 530, и основное торможение будет выполнено на шаге 532, ЦП 11 примет отрицательное решение (НЕТ) на шаге 512, когда он перейдет на шаг 512 и перейдет на шаг 534.
[0102] На шаге 534 ЦП 11 определяет, установлено ли значение флага SKF поддержания остановки на 0. Значение флага SKF поддержания остановки установлено на 1, когда скорость Vs транспортного средства становится равной нулю во время выполнения основного торможения, и установлено на 0, когда истекает заранее определенное время от времени, когда скорость Vs транспортного средства становится равной нулю. Значение флага SKF поддержания остановки установлено на 0 в начальном состоянии (в то время, когда ключ замка зажигания рассматриваемого транспортного средства РТС поворачивают из положения ВЫКЛ. в положение ВКЛ.).
[0103] Когда значение флага SKF поддержания остановки установлено на 0, ЦП 11 принимает положительное решение (ДА) на шаге 534 и переходит на шаг 536, чтобы определить, равна ли скорость Vs транспортного средства, полученная на шаге 504, нулю.
[0104] Когда скорость Vs транспортного средства не равна нулю, ЦП 11 принимает отрицательное решение (НЕТ) на шаге 536 и переходит на шаг 532, чтобы выполнить основное торможение и снизить скорость Vs транспортного средства. Затем ЦП 11 переходит на шаг 595, чтобы завершить алгоритм.
[0105] С другой стороны, когда скорость Vs транспортного средства становится равной нулю за счет осуществления основного торможения, ЦП 11 принимает положительное решение (ДА) на шаге 536, переходит на шаг 538, чтобы установить значение флага SKF поддержания остановки на 1, и переходит на шаг 540. На шаге 540 ЦП 11 устанавливает значение «таймера SKT поддержания остановки для определения того, истекло ли заранее установленное время от времени, когда скорость Vs транспортного средства стала равной нулю» на 0, чтобы запустить работу таймера SKT поддержания остановки, и переходит на шаг 542.
[0106] На шаге 542 ЦП 11 определяет, является ли значение таймера SKT поддержания остановки равным или меньшим чем пороговое значение Tsth таймера. Когда значение таймера SKT поддержания остановки равно или меньше порогового значения Tsth таймера, ЦП 11 принимает положительное решение (ДА) на шаге 542 и переходит на шаг 544. На шаге 544 ЦП 11 осуществляет контроль остановки для поддержания рассматриваемого транспортного средства РТС в остановленном состоянии (т. е. поддержания скорости Vs транспортного средства равной нулю) и переходит на шаг 595, чтобы завершить алгоритм. В частности, на шаге 544 ЦП 11 отправляет сигнал команды торможения для замедления рассматриваемого транспортного средства РТС при замедлении TG1 преграды на ЭБУ 32 тормозной системы и отправляет сигнал команды снижения крутящего момента на ЭБУ 36 двигателя.
[0107] Когда алгоритм выполняется после установки значения флага SKF поддержания остановки на 1 на шаге 538, и ЦП 11 переходит на шаг 534, значение флага SKF поддержания остановки устанавливается на 1. Таким образом, ЦП 11 принимает отрицательное решение (НЕТ) на шаге 534 и переходит на шаг 546. На шаге 546 ЦП 11 устанавливает значение, полученное добавлением 1 к текущему значению таймера SKT поддержания остановки, как новое значение таймера SKT поддержания остановки и переходит на шаг 542.
[0108] Соответственно, от времени, когда значение таймера SKT поддержания остановки установлено на 1, до времени, когда положительное решение (ДА) получено на шаге 542 (т. е. до тех пор, когда истечет заранее установленное время от времени, когда скорость Vs транспортного средства становится равной нулю), 1 добавляется к значению таймера SKT поддержания остановки на шаге 546, и на шаге 544 продолжается выполнение контроля поддержания остановки.
[0109] Затем, когда данный алгоритм выполнен в случае, когда значение таймера SKT поддержания остановки становится больше порогового значения Tsth таймера и ЦП 11 переходит на шаг 542, ЦП 11 принимает отрицательное решение (НЕТ) на шаге 542 и переходит на шаг 548. На шаге 548 ЦП 11 устанавливает значение флага SKF поддержания остановки на 0 и переходит на шаг 550, чтобы установить значение флага ABF основного торможения на 0. Затем ЦП 11 переходит на шаг 595, чтобы завершить алгоритм.
[0110] Когда искомое время до столкновения ТТС становится равным или меньше порогового значения T3th времени, значение флага ABF основного торможения устанавливается на 1, и выполняется основное торможение. Как только основное торможение будет выполнено, значение флага ABF основного торможения не устанавливается на 0 до тех пор, пока заранее установленное время не истечет от времени, когда скорость Vs транспортного средства не станет равной нулю. В то время, когда значение флага основного торможения установлено на 1, на шаге 512 принимается отрицательное решение (НЕТ); таким образом, шаги с 514 по 530 не выполняются, и замедление посредством основного торможения выполняется до тех пор, пока скорость Vs транспортного средства не станет равной нулю, без использования искомого времени до столкновения ТТС, и рассматриваемое транспортное средство РТС поддерживается в остановленном состоянии до истечения заранее установленного времени, когда скорость Vs транспортного средства становится равной нулю. Таким образом, искомое время до столкновения ТТС не используется после осуществления основного торможения, так как РЛС 20 миллиметрового диапазона имеет большие погрешности определения положения и относительной скорости каждой преграды, находящейся в пределах диапазона короткой дистанции.
[0111] Когда степень AP воздействия на педаль акселератора, полученная на шаге 501, меньше порогового значения APcth для управления, в то время, когда ЦП 11 выполняет шаг 517, ЦП 11 принимает отрицательное решение (НЕТ) на шаге 517 и переходит на шаг 520 и последующие шаги, не выполняя шаг 518. Т. е., когда степень AP воздействия на педаль акселератора меньше порогового значения APcth для управления, ЦП 11 осуществляет предаварийный контроль, если искомое время до столкновения ТТС равно или меньше порогового значения T(n)th времени, и не осуществляет предаварийный контроль, если искомое время до столкновения ТТС больше порогового значения T(n)th времени, независимо от значения флага PF разрешения (независимо от того, установлено ли условие разрешения).
[0112] Как понятно из примера выше, когда установлено условие разрешения, что степень AP воздействия на педаль акселератора равна или больше первого порогового значения AP1th степени воздействия, и скорость Vs транспортного средства равна или меньше порогового значения V1th скорости, система помощи устанавливает значение флага PF разрешения на 1 на шаге 430, показанном на фиг. 4. Когда степень AP воздействия на педаль акселератора равна или больше порогового значения APcth для управления, и значение флага PF разрешения установлено на 1, положительное решение (ДА) достигается на шаге 518, показанном на фиг. 5, и предаварийный контроль осуществляется, когда искомое время до столкновения ТТС равно или меньше порогового значения T(n)th времени. Таким образом, когда вероятность столкновения возрастает в связи с ошибочным нажатием педали, может быть увеличена вероятность осуществления предаварийного контроля без сбоя.
[0113] С другой стороны, когда не происходит ситуация, где степень AP воздействия на педаль акселератора равна или больше первого порогового значения AP1th степени воздействия, и скорость Vs транспортного средства равна или меньше порогового значения V1th скорости, условие разрешения не устанавливается, и значение флага PF разрешения поддерживается на 0. Когда степень AP воздействия на педаль акселератора равна или больше порогового значения APcth для управления, и значение флага PF разрешения установлено на 0 (т. е. когда не установлено условие разрешения), ЦП 11 принимает отрицательное решение (НЕТ) на шаге 518, показанном на фиг. 5, и завершает алгоритм, показанный на фиг. 5, без выполнения предаварийного контроля. Таким образом, если педаль акселератора в значительной степени нажата (т. е. степень AP воздействия на педаль акселератора равна или больше порогового значения APcth для управления), когда ошибочное нажатие на педаль не происходит, и увеличивается вероятность столкновения, определяется, что транспортное средство подвергается намеренному воздействию со стороны водителя, и предаварийный контроль не выполняется. Таким образом можно снизить вероятность выполнения ненужного предаварийного контроля во время намеренного воздействия со стороны водителя.
[0114] Изобретение не ограничивается примером изобретения, раскрытым выше, но могут быть осуществлены различные измененные примеры изобретения. Например, в то время пока степень AP воздействия на педаль акселератора определяется датчиком 21 положения акселератора в примере осуществления выше, степень AP воздействия на педаль акселератора может быть определена датчиком положения дросселя (не показан). Датчик положения дросселя предусмотрен для определения угла открытия дроссельной заслонки двигателя внутреннего сгорания. Угол открытия дроссельной заслонки взаимосвязан со степенью AP воздействия на педаль акселератора так, что открытие дроссельной заслонки увеличивается так же как увеличивается степень АР воздействия на педаль акселератора.
[0115] Кроме того, на шаге 420, показанном на фиг. 4, ЦП 11 может определять, является ли степень AP воздействия на педаль акселератора равной или большей чем первое пороговое значение AP1th степени воздействия , и является ли скорость нажатия, отображающая скорость нажатия педали акселератора, равной или большей чем пороговое значение скорости нажатия. Когда степень AP воздействия на педаль акселератора равна или больше чем первое пороговое значение AP1th степени воздействия, и скорость нажатия равна или больше порогового значения скорости нажатия, ЦП 11 принимает положительное решение (ДА) на шаге 420 и переходит на шаг 425. С другой стороны, когда установлен один из следующих случаев: степень AP воздействия на педаль акселератора меньше первого порогового значения AP1th степени воздействия, и скорость нажатия меньше порогового значения скорости нажатия, ЦП 11 принимает отрицательное решение (НЕТ) на шаге 420 и переходит на шаг 495, чтобы завершить алгоритм.
[0116] На шаге 435, показанном на фиг. 4, ЦП 11 может определять, является ли минимальное искомое время до столкновения ТТС (текущее ТТС), рассчитанное на шаге 516 алгоритма, показанного на фиг. 5, выполняемого в точке во времени, ближайшей к текущему времени, большим, чем минимальное искомое время до столкновения ТТС (последнее ТТС), рассчитанное на шаге 516 алгоритма, показанного на фиг. 5, выполняемом в точке во времени за один цикл до вышеуказанной точки во времени (точке во времени, находящейся раньше заранее установленного времени, чем вышеуказанная точка во времени). Когда текущее ТТС больше последнего ТТС, ЦП 11 принимает положительное решение (ДА) на шаге 435 и переходит на шаг 440, чтобы установить значение флага PF разрешения на 0. С другой стороны, когда текущее ТТС равно или меньше последнего ТТС, ЦП 11 принимает отрицательное решение (НЕТ) на шаге 435 и переходит на шаг 495, чтобы завершить алгоритм, показанный на фиг. 4. Если водитель избежал столкновения с препятствием посредством рулевого управления, текущее ТТС для препятствия становится больше последнего ТТС. В этом случае система помощи устанавливает значение флага PF разрешения на 0 и может определить, что установлено условие отмены разрешения. Кроме того, данная операция (операция по установке значения флага PF разрешения на 0, когда текущее ТТС больше последнего ТТС) может быть выполнена, когда степень AP воздействия на педаль акселератора равна или больше второго порогового значения AP2th степени воздействия (когда отрицательное решение (НЕТ) достигается на шаге 435 на фиг. 4).
[0117] Когда текущее ТТС больше последнего ТТС, и абсолютное значение вычитания (разность) между текущим ТТС и последним ТТС равно или больше заранее установленного значения, ЦП 11 может принимать положительное решение (ДА) на шаге 435 и устанавливать значение флага PF разрешения на 0.
[0118] ЦП 11 может использовать замедление преграды TG вместо искомого времени до столкновения ТТС как значение индекса столкновения, взаимосвязанное с вероятностью столкновения. В этом случае на шаге 516, показанном на фиг. 5, ЦП 11 рассчитывает замедление, с которым рассматриваемое транспортное средство РТС может остановиться до достижения каждого препятствия, как замедление TG преграды на основе относительной скорости каждого препятствия и расстояния между каждым препятствием и рассматриваемым транспортным средством РТС. Если направление, в котором ускоряется рассматриваемое транспортное средство РТС установлено как положительное значение, замедление TG преграды, являющееся замедлением, становится отрицательным значением. Таким образом, вероятность столкновения увеличивается, так как замедление TG преграды в качестве отрицательного значения меньше. Соответственно, независимо от того, используется ли в качестве значения индекса столкновения искомое время до столкновения ТТС или замедление TG преграды, значение индекса столкновения становится меньше с увеличением вероятности столкновения.
[0119] Значение индекса столкновения может быть любым значением, на основе которого может быть определена вероятность столкновения между препятствием и рассматриваемым транспортным средством РТС. Например, заданным значением столкновения может быть скорость препятствия относительно рассматриваемого транспортного средства РТС, расстояние препятствия относительно рассматриваемого транспортного средства РТС, боковая скорость препятствия относительно рассматриваемого транспортного средства РТС и т. п.
[0120] Пороговое значение APcth для управления может отличаться от первого порогового значения AP1th степени воздействия. В этом случае требуется, чтобы пороговое значение APcth для управления было установлено на значение, равное или большее чем второе пороговое значение AP2th степени воздействия .
[0121] В алгоритме, показанном на фиг. 5, ЦП 11 может выполнять управление аварийным сигналом на шаге 524, сразу после на шаге 520 получают положительное решение (ДА), а затем переходят на шаг 522. Таким образом, управление аварийным сигналом осуществляется во время выполнения предварительного торможения или основного торможения.
[0122] Предаварийный контроль может осуществляться только тогда, когда скорость Vs транспортного средства находится в пределах заранее установленного диапазона.
[0123] На шаге 508 алгоритма, показанного на фиг. 5, ЦП 11 может рассчитывать радиус поворота рассматриваемого транспортного средства РТС на основе скорости Vs транспортного средства и «угла θ поворота рулевого колеса, определенного датчиком угла поворота рулевого колеса (не показан)», а также рассчитывать спрогнозированный маршрут RCR перемещения.
[0124] Замедление TG преграды, используемое при предварительном торможении, может рассчитываться каждый раз, когда искомое время до столкновения ТТС становится равным или меньшим, чем пороговое значение T2th времени, и выполняется шаг 526, показанный на фиг. 5, на основе расстояния между препятствием и рассматриваемым транспортным средством РТС и скорости препятствия относительно рассматриваемого транспортного средства РТС в этой точке во времени. В этом случае замедление TG2 преграды для использования при основном торможении устанавливается на замедление TG преграды, рассчитанное последним во время предварительного торможения, и замедление TG1 преграды для использования при основном торможении устанавливается на замедление TG преграды, рассчитанное первым во время предварительного торможения.
[0125] РЛС 20 миллиметрового диапазона может быть заменена монокулярной камерой или стереоскопической камерой, способной определять расстояние между рассматриваемым транспортным средством РТС и преградой и азимутальное направление преграды, если смотреть от рассматриваемого транспортного средства РТС. В этом случае относительная скорость преграды рассчитывается на основе последнего положения преграды.
[0126] Положение преграды и относительная скорость преграды могут быть определены посредством объединения результата обнаружения преграды РЛС 20 миллиметрового диапазона с результатом обнаружения монокулярной камеры или стереоскопической камеры.
[0127] РЛС 20 миллиметрового диапазона может быть датчиком любого типа при условии, что он обнаруживает преграда, излучая радиосреду и принимая радиосреду, отраженную преградой. Таким образом, вместо РЛС 20 миллиметрового диапазона может быть использован ИК-локатор или звуковой эхолокатор.
[0128] Дисплей 30 не ограничен только HUD. В частности, дисплей 30 может быть мультиинформационным дисплеем МИД (МИД), сенсорной панелью навигационной системы и т. д. МИД — это дисплейная панель, расположенная на приборной панели как набор измерительных приборов, например, спидометр, тахометр, указатель уровня топлива, датчик температуры воды, одометр / счетчик пробега и сигнальные лампы.

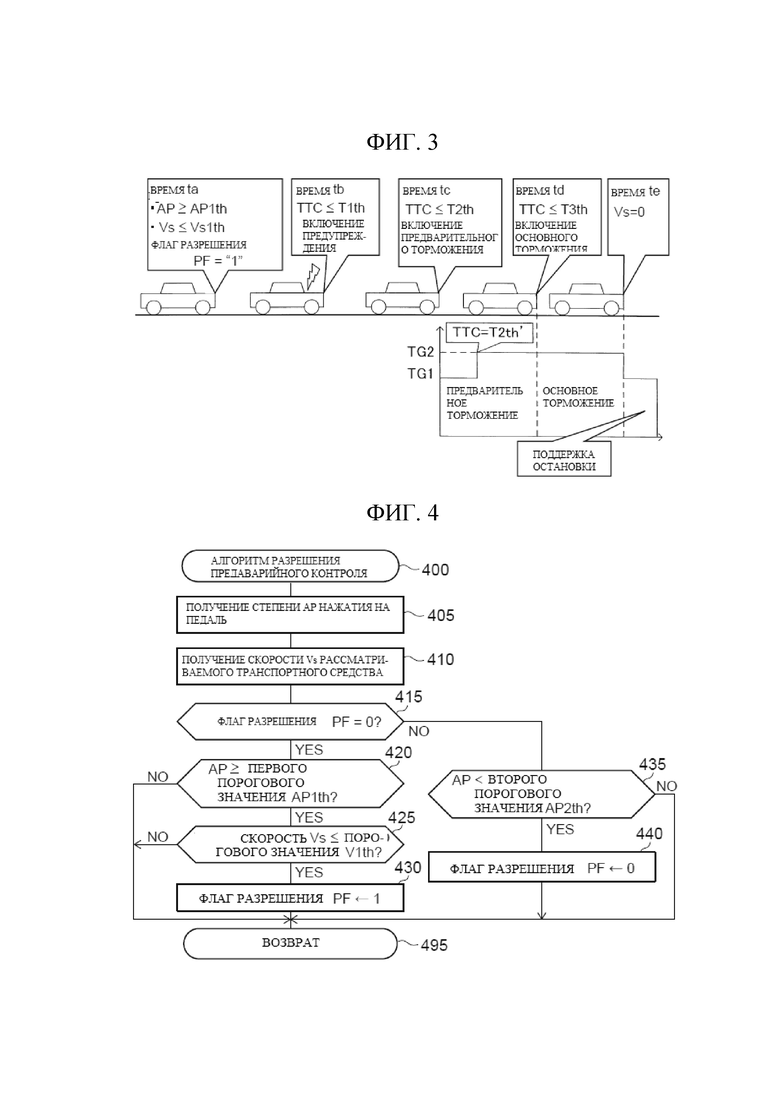
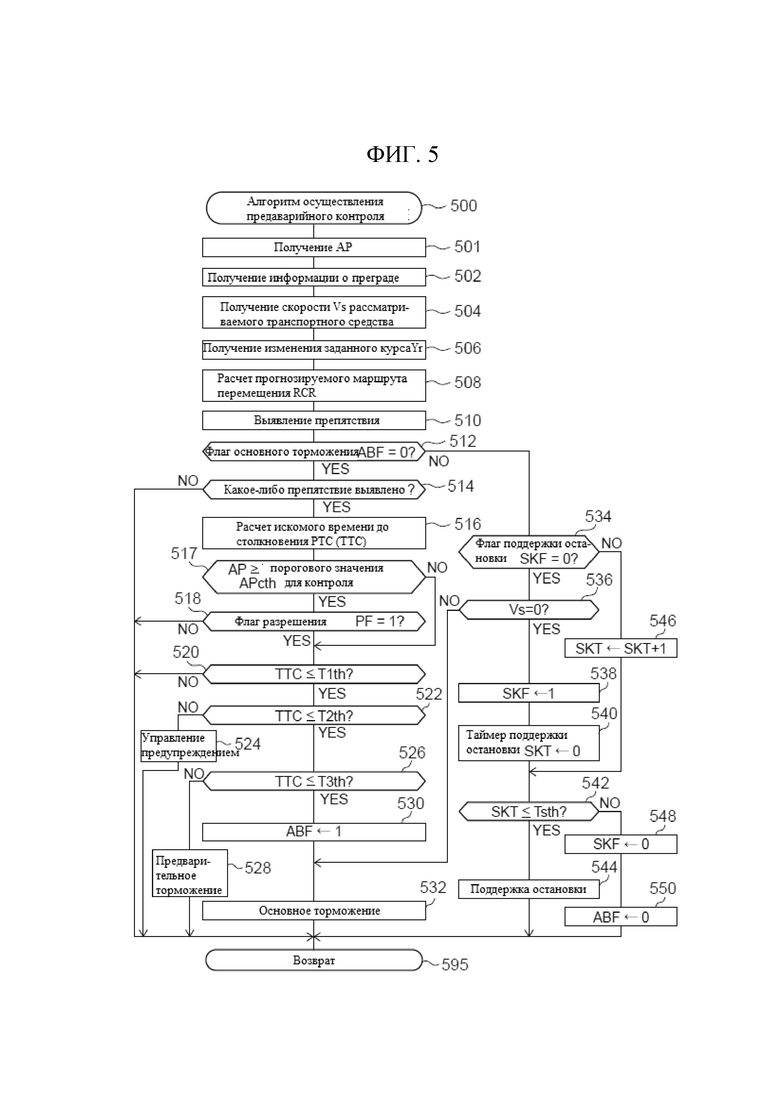
Изобретение относится к системе помощи при вождении. Система помощи при вождении содержит блок обнаружения преграды, блок определения степени воздействия, блок определения скорости и блок осуществления предаварийного контроля. Блок осуществления предаварийного контроля выполнен с возможностью осуществления предаварийного контроля для предотвращения столкновения с преградой, когда выполнено заранее установленное условие начала контроля, и не выполняется, даже когда выполнено заранее установленное условие начала контроля, предаварийный контроль, когда условие разрешения не было установлено в момент времени, в который выполняется заранее установленное условие начала контроля. Условие разрешения состоит в том, что степень воздействия для ускорения равна или превышает первое пороговое значение степени воздействия, и скорость транспортного средства равна или меньше порогового значения скорости. Повышается безопасность при использовании. 6 з.п. ф-лы, 5 ил.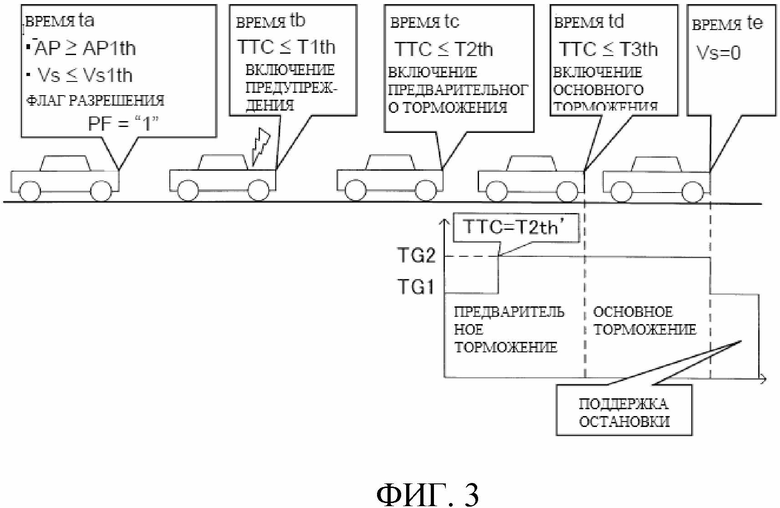
1. Система помощи при вождении, содержащая:
блок обнаружения преграды, выполненный с возможностью обнаружения информации о преграде, включая относительное положение преграды по отношению к рассматриваемому транспортному средству, информация о преграде содержит относительную скорость преграды по отношению к рассматриваемому транспортному средству;
блок определения степени нажатия, выполненный с возможностью получения степени воздействия для ускорения, относящейся к степени нажатия педали акселератора рассматриваемого транспортного средства;
блок определения скорости, выполненный с возможностью определения скорости транспортного средства, где скорость транспортного средства является скоростью рассматриваемого транспортного средства; и
блок осуществления предаварийного контроля, выполненный с возможностью осуществления предаварийного контроля для предотвращения столкновения с преградой, когда выполнено заранее определенное условие начала контроля, где заранее определенное условие начала контроля содержит обязательное условие о том, что установлено первое условие и второе условие, при этом первое условие состоит в том, что значение индекса столкновения соответствует условию заранее установленного значения индекса, где значение индекса столкновения взаимосвязано с возможностью столкновения преграды и рассматриваемого транспортного средства и указанное значение индекса столкновения рассчитывается на основе информации о преграде, а второе условие состоит в том, что степень воздействия для ускорения равна или превышает пороговое значение контроля, и не выполняется предаварийный контроль, даже когда выполнено заранее установленное условие начала контроля, в тех случаях, когда условие разрешения не было назначено в отношении момента времени, в который выполняется заранее установленное условие начала контроля, где условие разрешения состоит в том, что степень воздействия для ускорения равна или превышает первое пороговое значение степени воздействия, и скорость транспортного средства равна или меньше порогового значения скорости.
2. Система помощи при вождении по п. 1, отличающаяся тем, что когда установлено условие отмены разрешения, условие отмены разрешения состоит в том, что степень воздействия для ускорения становится меньше второго порогового значения степени воздействия, где второе пороговое значение степени воздействия равно или меньше первого порогового значения степени воздействия, и блок осуществления предаварийного контроля может быть выполнен с возможностью не осуществлять предаварийный контроль, даже если заранее установленное условие начала контроля выполнено и установлено условие разрешения.
3. Система помощи при вождении по п. 2, отличающаяся тем, что блок осуществления предаварийного контроля выполнен с возможностью повторного определения в заранее установленном цикле, установлено ли условие разрешения, и
невыполнения предаварийного контроля, когда установлено условие отмены разрешения, в течение периода от момента времени, в котором условие разрешения устанавливается в первый раз, до момента времени, в котором заранее установленное условие начала контроля выполняется.
4. Система помощи при вождении по п. 1, отличающаяся тем, что
блок осуществления предаварийного контроля может быть сконфигурирован так, чтобы:
рассчитать в качестве значения индекса столкновения корреляционное значение вероятности столкновения, которое уменьшается, поскольку вероятность столкновения между преградой и заявленным транспортным средством увеличивается каждый раз по истечении заранее установленного времени;
определить, что установлено условие отмены разрешения, если корреляционное значение вероятности столкновения, рассчитанное в заданный момент времени, больше корреляционного значения вероятности столкновения, рассчитанного в момент времени, ранее предустановленного времени, чем заданный момент времени, в случае, когда установлено условие разрешения; и
не выполнять предаварийный контроль, когда установлено условие отмены разрешения, даже когда выполнено заранее установленное условие начала контроля и установлено условие разрешения.
5. Система помощи при вождении по п. 4, отличающаяся тем, что
блок осуществления предаварийного контроля выполнен с возможностью
повторного определения в заранее установленном цикле, установлено ли условие разрешения, и
невыполнения предаварийного контроля, когда установлено условие отмены разрешения, в течение периода от момента времени, в который условие разрешения устанавливается в первый раз, до момента времени, в который заранее установленное условие начала контроля выполняется.
6. Система помощи при вождении по п. 1, отличающаяся тем, что
блок осуществления предаварийного контроля выполнен с возможностью:
расчета в качестве значения индекса столкновения уменьшенного корреляционного значения вероятности столкновения при увеличении вероятности столкновения между преградой и рассматриваемым транспортным средством каждый раз по истечении заранее установленного времени, заранее установленное значение индекса выбирают из множества условий значения индекса, заранее установленное условие начала контроля выбирают из множества условий начала контроля, и параметр предаварийного контроля выбирают из множества параметров предаварийного контроля;
определения того, что установлено первое условие посредством использования первого условия значения индекса как заранее установленного условия значения индекса, первое значение индекса является одним из множества условий значения индекса, когда корреляционное значение вероятности столкновения становится равным или меньше первого порогового значения определения; и
осуществления контроля для генерирования предупреждения водителю рассматриваемого транспортного средства из множества предупреждений предаварийного контроля, когда условие разрешения установлено моментом времени, в который выполнено первое условие начала контроля, в случае, когда первое условие начала контроля выполнено, первое условие начала контроля является одним из множества условий начала контроля, первое условие начала контроля содержит в качестве обязательного условия то, что первое условие установлено за счет использования первого условия значения индекса как заранее установленного условия значения индекса, и что установлено второе условие.
7. Система помощи при вождении по п. 6, отличающаяся тем, что
блок осуществления предаварийного контроля выполнен с возможностью:
определения того, что установлено первое условие посредством использования второго условия значения индекса как заранее установленного условия значения индекса, второе значение индекса является одним из множества условий значения индекса, когда корреляционное значение вероятности столкновения становится равным или меньше второго порогового значения определения, второе пороговое значение определения меньше первого порогового значения определения; и
осуществления как одного из множества состояний предаварийного контроля, контроля торможения для применения силы торможения к рассматриваемому транспортному средству при замедлении преграды, рассчитанном на основе информации о преграде, когда условие разрешения установлено моментом времени, в который выполнено второе условие начала контроля, в случае, когда второе условие начала контроля выполнено, второе условие начала контроля является одним из множества условий начала контроля, второе условие начала контроля содержит в качестве обязательного условия то, что первое условие установлено за счет использования второго условия значения индекса как заранее установленного условия значения индекса, и что установлено второе условие.
| JP 2004017847 A, 22.01.2004 | |||
| US 20100070151 A1, 18.03.2010 | |||
| ВСПОМОГАТЕЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2011 |
|
RU2570191C2 |

