Заявляемые технические решения относятся к области радиолокации и могут быть использованы в радиолокационных комплексах (РЛК), состоящих из радиолокационных модулей (РЛМ): радиолокационных станций (РЛС) или радиолокационных приемопередающих модулей (ППМ). РЛК предназначены для управления воздушным движением и для контроля воздушного пространства. Необходимым условием обеспечения этого управления и контроля является знание координат всех целей, находящихся в зоне ответственности РЛК.
Для обеспечения надежного контроля всего пространства создают РЛК на основе РЛМ (например, по патенту RU 2145093). В состав РЛК, как правило, включают РЛМ, работающие в диапазоне метровых или дециметровых волн (длинноволновые РЛМ) и обеспечивающие большие дальности обнаружения малозаметных целей. Однако длинноволновые РЛМ не обеспечивают указанную выше точность измерения угловых координат. Для улучшения точностных характеристик РЛК в его состав включают РЛМ, работающие в сантиметровом диапазоне волн, имеющие меньшую ширину луча антенны, и, соответственно, лучшие характеристики угловых точностей.
Известен способ обзора и сопровождения целей таким комплексом (патент RU 2150716). Обзор пространства и сопровождение целей осуществляют на основе разделения операций обнаружения, разрешения и сопровождения между РЛС1, РЛС2, …, РЛСn с длинами волн соответственно λ1>λ2>…>λn, n≥2, при этом для разрешения целей, обнаруженных РЛС1, применяют РЛС поэтапно от РЛС2, использующей данные РЛС1, до РЛСn, использующей данные РЛС(n-1). В этом случае конечная точность измерения угловых координат определяется РЛСn с наименьшей длиной волны. Указанные функции могут выполнять и РЛС и в упрощенном варианте комплекса ППМ (далее и то и другое - РЛМ).
Способ может быть реализован известными РЛК по патенту RU 2145093 (п. 1): РЛК состоит из n≥2 ППМ и модуля обработки (МО), выходы ППМ соединены с входами МО, а выход МО является выходом РЛК; часть ППМ выполнены с длиной волны λk, а остальные - с длинами волн λd>λk; и по п. 3: РЛК состоит из n≥1 ППМ и РЛС, при этом выходы ППМ соединены со входами РЛС, выход РЛС является выходом комплекса, РЛС выполнена с длиной волны λk, а ППМ с длинами волн λd>λk или РЛС с длиной волн λd большей, чем длины волн ППМ, а входы ППМК соединены с дополнительными выходами МО.
Основная задача известного способа обзора при комплексировании РЛС - минимизация размера углового сектора к моменту его обзора РЛСn с наименьшей длиной волны, что обеспечивает требуемую угловую точность на дальностях, достигаемых при использовании длинноволновой РЛС1 - это и является преимуществом известного способа. Необходимо подчеркнуть, что на каждом этапе улучшают угловое разрешение целей за счет уменьшения длины волны, разрешение же по дальности за счет этого не изменяется, поскольку она определяется шириной спектра сигнала (способом не предусматривается изменение этого параметра), при этом известный способ не предусматривает использование информации о дальности до цели на каждом последующем этапе.
Таким образом, на всех этапах уточнения угловых координат не используют информацию о дальности, получаемую на каждом предшествующем этапе, в этом - недостаток известного способа.
Поставленной задачей по первому варианту заявляемого изобретения (техническим результатом) является увеличение вероятности обнаружения цели и повышение темпа обзора. Задача решается на основе использования информации о дальности до целей, полученной на предшествующем этапе обзора, что позволяет осматривать угловой сектор только в пределах интервалов этих дальностей.
Поставленной задачей по второму варианту заявляемого изобретения (техническим результатом) является подавление пассивных помех, действующих в диапазоне длин волн λm<λ1. Задача решается на основе использования информации о дальности, полученной на предшествующем этапе обзора, и применения сигналов с неоднозначной дальностью на всех этапах обзора кроме первого.
Заявленный технический результат по первому варианту заявляемого способа (п. 1 формулы) достигается тем, что в способе радиолокационного обзора пространства и сопровождения целей, радиолокационным комплексом, состоящим из n≥2 радиолокационных модулей РЛМ1…РЛМn с длинами волн λ1>…>λn, основанном на поэтапном уточнении координат целей, согласно изобретению обзор пространства и определение угловых координат сектора, содержащего цели, и их дальностей осуществляют с помощью РЛМ1, после чего поэтапно уточняют угловые координаты сектора и определяют дальности до целей с помощью РЛМi, n>i>1, а с помощью РЛМn определяют угловые координаты целей и уточняют дальности до них, при этом с помощью РЛМm, n≥m>1 осматривают угловой сектор в пределах прогнозируемых интервалов дальностей, в которых с помощью РЛМj, j<m обнаружили цели.
Так же тем, что согласно изобретению в качестве РЛМ используют радиолокационные станции или приемо-передающие модули.
Заявленный технический результат по второму варианту заявляемого способа (п. 3 формулы) достигается тем, что в способе радиолокационного обзора пространства и сопровождения целей, радиолокационным комплексом, состоящим из n≥2 радиолокационных модулей РЛМ1…PЛMn с длинами волн λ1>…>λn, основанном на поэтапном уточнении координат целей, согласно изобретению обзор пространства и определение угловых координат сектора, содержащего цели, измерение их дальностей осуществляют с помощью РЛМ1, после чего уточняют эти координаты поэтапно с помощью РЛМi с длиной волны λi, а с помощью РЛМn в секторе с уточненными координатами обнаруживают цели, измеряя их угловые координаты и уточняя дальности до них, при этом с помощью РЛМm, m>1 осматривают угловой сектор в пределах прогнозируемых интервалов дальностей, в которых на предшествующих этапах обнаружили цели, используя сигналы с однозначной дальностью в пределах указанных интервалов, если в их частотном диапазоне действует пассивная помеха.
Так же тем, что согласно изобретению в качестве РЛМ используют радиолокационные станции или приемо-передающие модули.
Оба варианта способа могут быть реализованы одним из следующих двух вариантов комплекса.
РЛК, состоящий из n≥2 РЛМ и МО, выходы РЛМ соединены со входами МО, выход МО является выходом РЛК, РЛМ1…РЛМn выполнены с длинами волн λ1>…>λn, согласно изобретению входы РЛМm, m>1 соединены с дополнительными выходами МО.
В качестве РЛМ используют радиолокационные станции или приемопередающие модули.
РЛК, состоящий из n≥1 ППМ и РЛС, при этом выходы ППМ соединены со входами РЛС, выход РЛС является выходом комплекса, РЛС выполнена с длиной волны λk, а ППМj, j=1…n с длинами волн λ1>λj…>λn>λк или РЛС с длиной волн λ1, а ППМ с длинами волн λj…>λn>λк при λ1>λj, входы ППМК соединены с дополнительными выходами РЛС, согласно изобретению входы ППМm, k>m>1 соединены с дополнительными выходами РЛС.
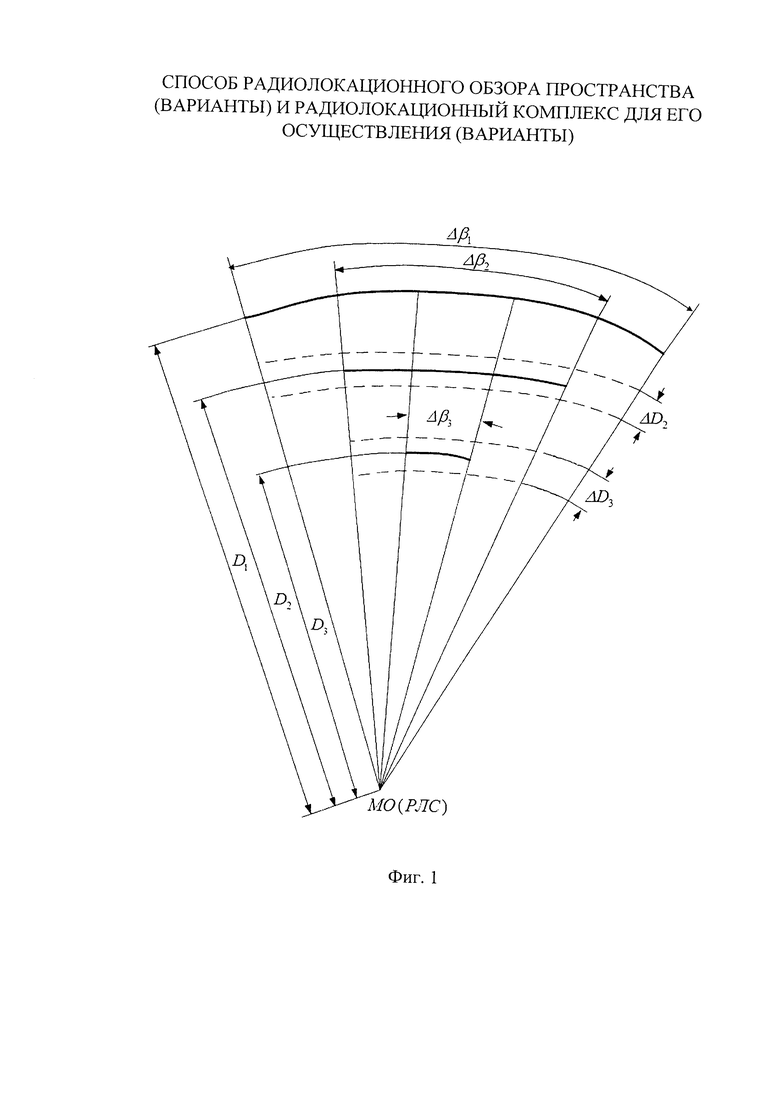
Изобретения иллюстрируются фиг. 1, на которой показан процесс поэтапного уточнения угловых координат сектора.
Поясним суть изобретений на примере работы РЛК при n=3: РЛМ1, РЛМ2 и РЛМ3 с длинами волн λ1>λ2>λ3. Пусть в интервале времени t1 с помощью РЛМ1 в угловом секторе размером Δβ1 обнаружена приближающаяся цель на дальности D1 от МО (РЛС), дальность до которой известным способом (С.З. Кузьмин «Основы проектирования систем цифровой обработки радиолокационной информации», М., «Радио и связь», 1986, с. 108-110, с 115, 1 абз. сверху) прогнозируют к моменту осмотра углового сектора с помощью РЛМ2, выставляя строб, ограничивающий интервал дальностей возможного появления цели (на фиг. 1 стробы в виде пунктиров, жирные линии - отметки от цели). На следующем этапе уточняют угловые координаты сектора до размера
Δβ2<Δβ1 и определяют дальность до цели с помощью РЛМ2, осматривая угловой сектор размером Δβ1, но только в интервале дальности ΔD2, ограниченном стробом (прогнозируемым интервалом дальностей), а с помощью РЛМ3 определяют угловые координаты цели (с точностью до углового размера Δβ3) и уточняют дальность до нее, осматривая в секторе Δβ2 строб ΔD3 (также прогнозируемый интервал дальностей).
Решение поставленной задачи по первому варианту заявляемого изобретения достигается следующим образом.
Поскольку с уменьшением времени наблюдения снижается вероятность ложной тревоги (Справочник по радиолокации под ред. М. Сколника; М., «Сов. радио», т. 4, с. 50, 3-й абз. сверху), то при замене интервала наблюдения, определяемого максимальной дальностью действия РЛМ2 на интервал в пределах которого РЛМ1 обнаружила цель, может быть снижен порог обнаружения, что увеличит вероятность обнаружения цели. Повысится и вероятность обнаружения цели в условиях действия пассивных помех из-за уменьшения импульсного объема, определяемого шириной луча и осматриваемым интервалом дальности (Теоретические основы радиолокации под ред. Я.Д. Ширмана, М., «Сов. радио», 1970, с. 225, последний абзац)
Увеличение темпа обзора достигается следующим. Для однозначного измерения дальности необходимо, чтобы период зондирования был больше времени запаздывания отраженного сигнала, которое определяется максимальной дальностью действия РЛМ2, (там же, с. 219, 3-й абз. снизу). При использовании информации о дальности до цели, полученной РЛМ1, дальность действия РЛМ2 по заявляемому способу будет ограничена не максимальной его дальностью действия, а дальностью до наиболее удаленной цели, к тому же эта дальность будет уменьшаться по мере приближения цели, что и позволит уменьшать время обзора направления, что обеспечит увеличение темпа обзора (там же, с. 241, 4-й абз. снизу); для удаляющейся цели темп обзора может быть увеличен до достижения целью максимальной дальности.
Таким образом, заявленный способ по первому варианту обеспечивает увеличение вероятности обнаружения цели и повышение темпа обзора. Этим достигается решение поставленной задачей по первому варианту заявляемого изобретения.
Решение поставленной задачи по второму варианту заявляемого изобретения достигается следующим образом.
Для подавления пассивных помех, действующих в диапазоне РЛМ2, необходимо формировать сигнал с высокой разрешающей способностью по скорости. В радиолокации действует принцип неопределенности, заключающийся в том, что повышение точности определения дальности уменьшает разрешающую способность по скорости (Д.Е. Вакман, Сложные сигналы и принцип неопределенности в радиолокации. М., «Сов. радио», 1965, с. 65, второй абзац снизу), исключая возможность отличить движущуюся цель от малоподвижных элементов пассивной помехи. Так, для точного определения дальности необходимо использовать широкополосные сигналы. При этом сечение функции неопределенности такого сигнала локализовано по оси времени (дальности), но «размазано» по оси скорости. С другой стороны, использование протяженных во времени сигналов позволяет обеспечить высокую точность определения скорости, что необходимо для выделения движущейся цель на фоне пассивных помех, так как сечение функции неопределенности такого сигнала локализовано по оси скорости, но «размазано» по оси времени (возникнет неоднозначность по дальности) (там же, с. 57, рис. 16). Поэтому невозможно за счет использования одного зондирующего сигнала обеспечить разрешение по дальности и по скорости. Но известно, что при использовании вместо одиночного импульса когерентной пачки импульсов можно перераспределить неопределенность: получить множество неоднозначных отсчетов и по дальности и по скорости, каждый из которых производится с более высокой точностью (там же, с. 65, первый абзац, с. 61, рис. 19).
Согласно заявляемому способу по второму варианту РЛМ2 осматривает угловой сектора размером Δβ1, в интервале дальности ΔD2, (прогнозируемый интервал дальностей), поэтому при обеспечении однозначности по дальности в пределах ΔD2, неоднозначность вне строба будет допустима. Однозначность по дальности в пределах ΔD2 будет обеспечена, если период повторения T1 (там же, с. 61, рис. 19) будет больше ΔD2.
Таким образом, ценой получения допустимой неопределенности по дальности вне строба ΔD2 достигается повышение точности по скорости, что и обеспечивает разрешение движущейся цели на фоне пассивных помех.
Этим достигается решение поставленной задачи по второму варианту заявляемого изобретения.
Для реализации предложенных способов заявлены радиолокационные комплексы по п. 5 или по п. 7 формулы заявленных изобретений.
Комплекс по п. 5 основан на известном комплексе по п. 1 формулы изобретения патента RU 2145093, в него введен дополнительный признак - «входы PЛMm, m>1 соединены с дополнительными выходами МО». Это обеспечивает реализацию признака способов по п.п. 1, 3: «с помощью РЛМm, m>1 осматривают угловой сектор в пределах интервалов дальностей, в которых с помощью РЛМj, j<m обнаружили цели». В известном комплексе с выходов ППМ (РЛМ), соединенных со входами МО, информация об интервалах дальности, в которых обнаружены цели, поступает на входы МО, а с введенных согласно заявляемому комплексу дополнительных выходов МО ее передают на РЛМm.
Комплекс по п. 7 основан на известном комплексе по п. 3 формулы указанного патента. В нем вместо МО (как в комплексе по п. 5) используют РЛС в двух вариантах: РЛС с наименьшей длиной волны λк либо с наибольшей - λ1. В обоих вариантах выходы ППМ соединены со входами РЛС, поэтому на РЛС имеется информация об интервалах дальности, содержащих цели (за счет РЛС либо ППМ с длиной волны λ1), поэтому для получения этой информации ППМm их входы соединены с введенными согласно заявляемому комплексу дополнительными выходами РЛС.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обзора пространства и сопровождения трассы цели (варианты) и радиолокационный комплекс для его осуществления (варианты) | 2017 |
|
RU2673877C2 |
| Способ радиолокационного обзора пространства | 2017 |
|
RU2663883C1 |
| Способ сопровождения траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели (варианты) и радиолокационный комплекс для его осуществления (варианты) | 2017 |
|
RU2663226C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ, КОМПЛЕКС РЛС ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1998 |
|
RU2150716C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА И РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ РЕАЛИЗАЦИИ СПОСОБА (ВАРИАНТЫ) | 2011 |
|
RU2471201C2 |
| МНОГОДИАПАЗОННЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2346291C2 |
| Способ обзора пространства (варианты) | 2018 |
|
RU2692076C1 |
| Способ обзора пространства и средство управления зенитно-ракетной системы для его осуществления | 2018 |
|
RU2685556C1 |
| РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ (ВАРИАНТЫ) И РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2145093C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ КЛАССОВ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ ДЛЯ МНОГОДИАПАЗОННОГО РАЗНЕСЕННОГО РАДИОЛОКАЦИОННОГО КОМПЛЕКСА С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2020 |
|
RU2741057C1 |
Изобретение (его варианты) относится к области радиолокации и может быть использовано в радиолокационных комплексах, состоящих из радиолокационных модулей (РЛМ): радиолокационных станций (РЛС) или приемо-передающих модулей (ППМ), осуществляющих обзор пространства с поэтапным уточнением координат. Достигаемый технический результат по первому варианту - увеличение вероятности обнаружения цели и повышение темпа обзора. Указанный результат достигается за счет того, что обзор пространства и определение угловых координат сектора, содержащего цели, и их дальностей осуществляют с помощью РЛМ с наибольшей длиной волны, после чего осуществляют поэтапный процесс уточнения угловых координат сектора и определения дальностей до целей с помощью РЛМ с меньшими длинами волн, заканчивая процесс уточнения с помощью РЛМ с наименьшей длиной волны, при этом в поэтапном процессе уточнения координат осматривают угловой сектор только в пределах интервалов дальностей, соответствующих интервалам, в которых на предыдущих этапах была обнаружена цель. Достигаемый технический результат по второму варианту - подавление пассивных помех. Указанный результат достигается за счет того, что обзор пространства и определение угловых координат сектора, содержащего цели, и их дальностей осуществляют с помощью РЛМ с наибольшей длиной волны, после чего осуществляют поэтапный процесс уточнения угловых координат сектора и определения дальностей до целей с помощью РЛМ с меньшими длинами волн, заканчивая процесс уточнения с помощью РЛМ с наименьшей длиной волны, при этом в поэтапном процессе уточнения координат осматривают угловой сектор только в пределах интервалов дальностей, соответствующих интервалам, в которых на предыдущих этапах была обнаружена цель, используя сигналы с однозначной дальностью только в пределах указанных интервалов, если в частотном диапазоне РЛМ действует пассивная помеха. 2 н. и 2 з.п. ф-лы, 1 ил.
1. Способ обзора пространства и сопровождения целей радиолокационным комплексом, состоящим из n≥2 радиолокационных модулей (РЛМ), выполненных с различными длинами волн, основанный на поэтапном уточнении координат целей, отличающийся тем, что обзор пространства и определение угловых координат сектора, содержащего цели, и их дальностей осуществляют с помощью РЛМ с наибольшей длиной волны, после чего осуществляют поэтапный процесс уточнения угловых координат сектора и определения дальностей до целей с помощью РЛМ с меньшими длинами волн, заканчивая процесс уточнения с помощью РЛМ с наименьшей длиной волны, при этом в поэтапном процессе уточнения координат осматривают угловой сектор только в пределах интервалов дальностей, соответствующих интервалам, в которых на предыдущих этапах была обнаружена цель.
2. Способ по п. 1, отличающийся тем, что в качестве РЛМ используют радиолокационные станции или приемо-передающие модули.
3. Способ обзора пространства и сопровождения целей радиолокационным комплексом, состоящим из n≥2 радиолокационных модулей (РЛМ), выполненных с различными длинами волн, основанный на поэтапном уточнении координат целей, отличающийся тем, что обзор пространства и определение угловых координат сектора, содержащего цели, и их дальностей осуществляют с помощью РЛМ с наибольшей длиной волны, после чего осуществляют поэтапный процесс уточнения угловых координат сектора и определения дальностей до целей с помощью РЛМ с меньшими длинами волн, заканчивая процесс уточнения с помощью РЛМ с наименьшей длиной волны, при этом в поэтапном процессе уточнения координат осматривают угловой сектор только в пределах интервалов дальностей, соответствующих интервалам, в которых на предыдущих этапах была обнаружена цель, используя сигналы с однозначной дальностью только в пределах указанных интервалов, если в частотном диапазоне РЛМ действует пассивная помеха.
4. Способ по п. 3, отличающийся тем, что в качестве РЛМ используют радиолокационные станции или приемо-передающие модули.
| РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ (ВАРИАНТЫ) И РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2145093C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ, КОМПЛЕКС РЛС ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1998 |
|
RU2150716C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |
| МНОГОДИАПАЗОННЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2346291C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ЗОНЫ ПРОСТРАНСТВА | 2009 |
|
RU2400768C1 |
| JP 4716844 B2, 06.07.2011 | |||
| Способ сборки блока удаляемых литейных моделей | 2021 |
|
RU2773975C1 |
| US 9575174 B2, 21.02.2017. | |||

