Изобретение относится к области радиолокации и может быть использовано при обзоре пространства в радиолокационных станциях (РЛС) с фазированными антенными решетками (ФАР).
Предлагаемое техническое решение относится к области оборонной техники, в частности к радиолокационным станциям с фазированными антенными решетками, и может быть использовано для организации противовоздушной обороны войск и военных объектов от поражения средствами воздушного нападения противника в условиях радиоэлектронного подавления.
Известен способ радиолокационного обзора, заключающийся в зондировании радиолокационной станцией с фазированной антенной решеткой угловых направлений сигналами при пошаговом перемещении игольчатого луча диаграммы направленности (ДН) антенны в пространстве (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана. М., «Сов. радио», 1970, с.242, п.2, рис.5.21,в). Преимущество данного способа состоит в высокой точности измерения угловых координат, в высокой разрешающей способности по угловым координатам и высокой концентрации электромагнитной энергии в угловом направлении, что определяется малыми размерами луча.
Недостаток данного способа заключается в следующем. При организации радиоэлектронного подавления (РЭП) РЛС применяются многолучевые системы создания активных шумовых помех (АШП). При этом антенна такой системы РЭП формирует диаграмму направленности в азимутальной плоскости шириной не более 15° с коэффициентом усиления примерно 20 дБ и средним значением выходной мощности до 50 Вт (Ю.М.Перунов, К.И.Фомичев, Л.М.Юдин. Радиоэлектронное подавление информационных каналов систем управления оружием. М., «Радиотехника», 2003, стр.98-99, рис.3.17). Воздействие помехи с такой мощностью приводит к тому, что экраны индикаторов РЛС полностью или частично засвечиваются помехой, вследствие чего отметки реальных целей оказываются замаскированными. Шумовые помехи подавляют в РЛС каналы обнаружения, селекции по дальности и скорости, а также затрудняют угловую селекцию при большой мощности помехи из-за их воздействия по боковым лепесткам диаграммы направленности приемной антенны (Ю.М.Перунов, К.И.Фомичев, Л.М.Юдин. Радиоэлектронное подавление информационных каналов систем управления оружием. М., «Радиотехника», 2003, стр.70). Это приводит к невыполнению основной задачи РЛС - своевременному обнаружению воздушных объектов на требуемой дальности.
Наиболее близким по технической сущности является способ радиолокационного обзора пространства, основанный на взаимодействии разнесенных в пространстве радиолокационных станций, входящих в многопозиционную радиолокационную систему (В.Я.Аверьянов. Разнесенные радиолокационные станции и системы. Минск, «Наука и техника», 1978, с.52-74). При этом сканирование пространства может быть успешно осуществлено при больших базах практически без потерь энергии эхо-сигналов по методу сопровождения зондирующего объема с помощью фазированной антенной решетки (ФАР) и управления движением ее луча по требуемому закону (В.Я.Аверьянов. Разнесенные радиолокационные станции и системы. Минск, «Наука и техника», 1978, с.83-85, рис.39).
Преимущество такой системы состоит в том, что создать прицельные по направлению помехи разнесенным в пространстве РЛС весьма сложно, так как направление от источника активных помех на неизлучающую позицию часто неизвестно. А вынужденное излучение в широком секторе снижает плотность потока мощности помех, действующих на каждую позицию (B.C.Черняк. Многопозиционная радиолокация. М., «Радио и связь», 1993, с.28-29).
Однако недостатком данного способа являются значительные энергетические затраты при обзоре пространства, так как все станции системы должны осматривать одновременно каждый участок зоны обзора, в том числе и "пустые" направления (в которых отсутствуют цели и нет воздействия помех), и не могут быть использованы как независимо работающие разнесенные в пространстве РЛС. В результате это приводит к значительному уменьшению зоны обзора радиолокационной системы, состоящей из данных РЛС при заданном периоде обзора либо увеличению времени обзора заданной зоны, т.е. превышению установленного энергетического ресурса за период обзора.
Для оценки помехозащищенности радиоэлектронной системы, а также входящих в ее состав отдельных РЛС используют максимальную дальность обнаружения цели с заданной эффективной отражающей поверхностью в условиях активных помех или коэффициент сжатия зоны обнаружения Kсж=RАП/RMAX, который определяется отношением дальности обнаружения воздушного объекта в условиях помех RАШП к максимальной дальности обнаружения без помех RMAX при заданных качестве обнаружения, способе постановке помех, дальности до постановщика активных помех (ПАП) и спектральной плотности помехи, излучаемой ПАП в направлении на РЛС (Основы построения РЛС РТВ / В.П.Блохин, Б.Ф.Бондаренко, В.Т.Неснов, В.Е.Угольников. Под редакцией Б.Ф.Бондаренко. Киев, КВИРТУ ПВО, 1987, с.18). Коэффициент сжатия зоны обнаружения РЛС характеризует степень сохранения дальности действия в условиях воздействия АШП (Справочник офицера воздушно-космической обороны / Под общей редакцией С.К.Бурмистрова. Тверь, ВА ВКО, 2005, с.421-422).
Обнаружение воздушных объектов обеспечивается в тех элементах разрешения, где реализуется требуемое качество обнаружения в различных помеховых условиях. Это позволяет аппроксимировать зону обнаружения РЛС совокупностью импульсных объемов ограниченными δν=δβ×δε×δr разрешающими способностями по азимуту δβ, углу места δε и дальности δr соответственно
где No - количество импульсных объемов разрешения;
k=Ωβ/δβ - количество направлений зондирования в горизонтальной плоскости;
m=(εmax-εmin)/δε - количество направлений зондирования в вертикальной плоскости в i-м азимутальном направлении;
nkm=RMAXkm/δr - количество элементов разрешения по дальности в каждом угловом элементе разрешения;
Ωβ - минимальный угол места зоны обнаружения;
εmax - максимальный угол места зоны обнаружения;
εmin - размер зоны в азимутальной плоскости;
RMAX - максимальная наклонная дальность обнаружения.
При радиоэлектронном подавлении зоны обнаружении РЛС уменьшаются (сжимаются) за счет ухудшения условия выделения полезного сигнала на фоне помех. Чем сильнее помеха, тем на меньшей дальности отношение сигнал/помеха будет достаточным для обнаружения цели, тем в большей степени сокращается зона обнаружения. Таким образом, в условиях воздействия активных шумовых помех изменяется (уменьшается) количество элементов разрешения, составляющих зону обнаружения (ЗО) каждой РЛС. Поэтому количественно оценку сохранения дальности действия РЛС в условиях АШП предложено осуществлять в соответствии с выражением (2)
где NАШП - количество импульсных объемов, составляющих ЗО РЛС с ФАР в условиях воздействия АШП;
N0 - количество импульсных объемов, составляющих ЗО РЛС с ФАР, без воздействия АШП.
Достигаемым техническим результатом является сохранение дальности действия радиолокационных станций с фазированными антенными решетками в условиях воздействия активных шумовых помех при ограниченных энергетических затратах на обзор зоны пространства.
Задача решается на основе объединения радиолокационных станций в многопозиционную систему и выбора разнесенных РЛС с ФАР для просмотра тех областей пространства (импульсных объемов) с заданным качеством (не превышая установленный энергетический ресурс), в которых обнаружение воздушных объектов в условиях воздействия активных шумовых помех однопозиционной РЛС с ФАР невозможно.
Указанный результат достигается тем, что в способе радиолокационного обзора пространства, основанном на взаимодействии разнесенных в пространстве РЛС, в процессе обзора пространства оценивается помеховая обстановка разнесенными в пространстве РЛС в каждом угловом направлении зоны обзора (возможность для этого дает применение ФАР). На основе энергетических различий помеховых сигналов, наблюдаемых в разнесенных пунктах приема, выбираются конкретные радиолокационные станции для работы в пассивном и активном режимах в зависимости от текущего расположения цели, постановщиков помех и геометрии средств системы и с учетом полученной информации о помеховой обстановке. В результате происходит сохранение дальности действия РЛС за счет просмотра разнесенными РЛС тех областей пространства (импульсных объемов), в которых обнаружение ВО, при воздействии АШП, однопозиционной РЛС невозможно.
Также тем, что:
- в информации о помеховой обстановке содержатся координаты угловых направлений и значения измеренных в них отношений помеха-шум для каждой РЛС;
- в информации о помеховой обстановке содержатся координаты ПАП, циркулирующей в общей информационной системе;
- в угловых направлениях, в которых обеспечивается уверенное обнаружение целей на требуемой дальности, обзор пространства осуществляется однопозиционной РЛС с учетом обеспечения минимума энергетических затрат;
- в угловых направлениях, в которых действует постановщик активных помех по главному лепестку ДН РЛС, обзор пространства осуществляется разнесенными РЛС в пассивном режиме работы. При этом уточняются и выдаются координаты ПАП в общую информационную систему;
- в угловых направлениях с "непреодолимой" по мощности помехой, в которых плотность потока мощности ПАП не обеспечивает обнаружение цели на требуемой дальности, обзор пространства осуществляется разнесенными РЛС. Активная РЛС производит обнаружение воздушного объекта на максимальной дальности в условиях воздействия АШП. Область пространства, где обнаружение воздушных объектов в условиях воздействия активных шумовых помех однопозиционной РЛС невозможно, сканируется приемной РЛС, работающей в пассивном режиме. При этом выбирается одна бистатическая РЛС, осуществляющая обзор максимального количества элементов разрешения с заданным качеством обнаружения, но не превышающая выделенный энергетический ресурс. Сокращения энергетических затрат происходит за счет формирования дополнительно луча ДН антенны РЛС, работающей в пассивном режиме и сканирования данным лучом по методу сопровождающего объема.
Суть заявленного технического решения (способа) заключается в следующем.
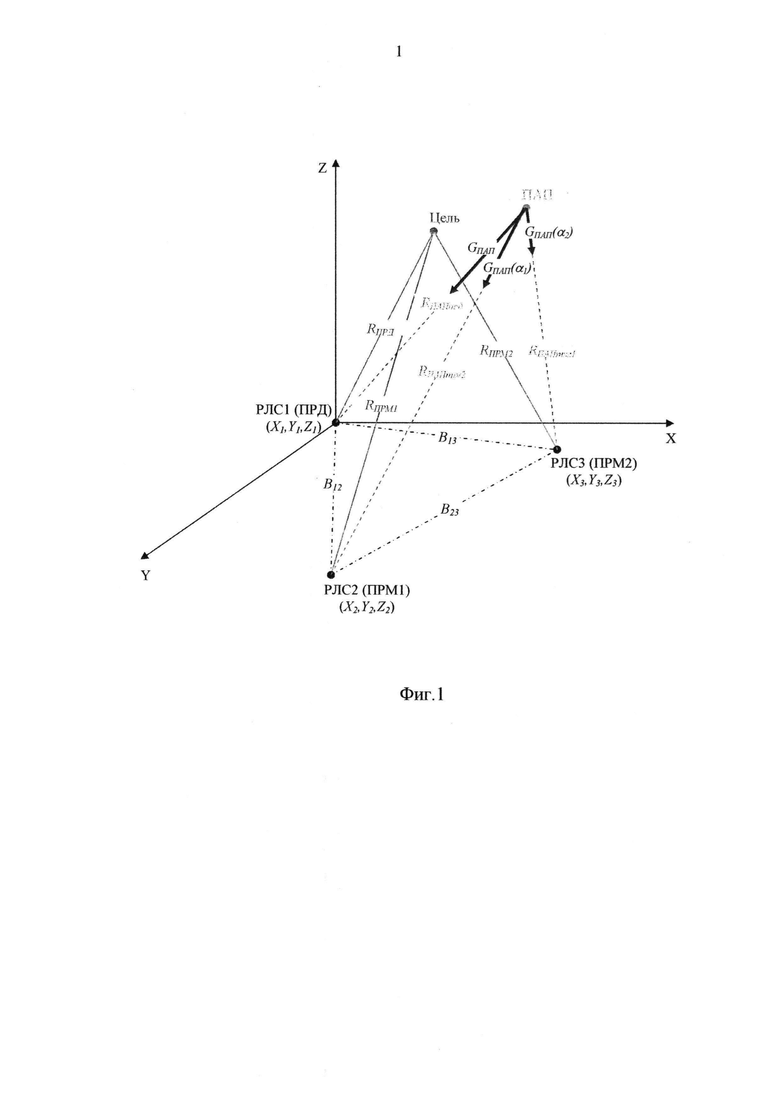
После установки независимых однопозиционных РЛС N=3 радиолокационной системы на заданной позиции осуществляется взаимная координатная привязка всех средств системы, т.е. обмен соответствующими значениями X1, Y1, Z1, Х2, Y2, Z2, X3, Y3, Z3 (фиг.1). После завершения процедуры взаимной координатной привязки РЛС начинается процесс поиска и обнаружения целей в заданной области обзора.
Перед зондированием очередного азимутально-угломестного положения (АУМП) оценивается уровень помех на входе каждой РЛС. Для этого зона обзора каждой РЛС представляется в виде ячеечной модели, которая состоит из конечного числа k×m угловых направлений. Число угловых направлений определяется произведением числа строк (азимутальных направлений) в зоне обзора k на число столбцов (угломестных направлений) m, содержащихся в каждой строке. Помеховая обстановка для данной модели зоны обзора характеризуется матрицей 
Данные о помеховой обстановке, привязанные к шкале времени, через систему передачи данных передаются на все (N-1) РЛС.
При отсутствии радиоэлектронного противодействия все РЛС работают как независимые однопозиционные радиолокационные системы и осуществляют обнаружение (необнаружение) цели в зондируемом АУМП.
Основным недостатком однопозиционных РЛС является резкое снижение дальности обнаружения в условиях постановки активных помех. Другими словами, показатель помехозащищенности (коэффициент сжатия зоны обнаружения), характеризующий степень сохранения эффективности РЛС, при наличии помех существенно уменьшается.
В случае постановки противником активных помех для однопозиционной РЛС производится проверка на наличие ПАП в просматриваемом угловом направлении по информации, полученной из общей информационной системы. При подтверждении наличия ПАП по одному из правил для двухпозиционной радиолокационной системы рассчитываются текущие значения угловых координат ПАП относительно данной РЛС (Справочник по радиолокации. / Под ред. М.Сколника. М., «Сов. радио», 1978, т.4, с.195-198, табл.1, рис.1). Далее уточненные координаты поступают в общую информационную систему.
Если в текущем угловом направлении отсутствует ПАП, то осуществляется управление процессом обзора пространства разнесенными радиолокационными станциями с ФАР. Для этого производится выбор измерительной позиции для работы в пассивном режиме, имеющей наилучшие условия обнаружения. При этом целью управления является обеспечение обнаружения целей на возможно большей дальности в условиях воздействия активных помех.
В основе расчета дальности действия РЛС лежит расчет отношения сигнал/шум, необходимого для обнаружения цели с требуемой вероятностью при фиксированной вероятности ложной тревоги в условиях отсутствия помех γ=Pc/Pш и при наличии помех γ=Pс/Pш+Pп (В.С.Черняк. Многопозиционная радиолокация. М., «Радио и связь», 1993, с.58). При создании активных помех внешнего прикрытия энергетические соотношения для мощности радиолокационного сигнала, отраженного от воздушного объекта и уровня сигнала помехи на входе приемника однопозиционной РЛС, примут следующий вид (Ю.М.Перунов, К.И.Фомичев, Л.М.Юдин. Радиоэлектронное подавление информационных каналов систем управления оружием. М., «Радиотехника», 2003, с.46)


где PПРД - мощность передатчика РЛС;
GПРД, GПРМ - коэффициент усиления передающей и приемной антенн в текущем угловом направлении соответственно;
σ - эффективная отражающая поверхность цели;
λ - длина волны;
RПРД - удаление цели от РЛС;
10-0,2KR - коэффициент, учитывающий затухание сигнала в атмосфере;

PПАП - мощность передатчика помех;
GПАП - коэффициент усиления передающей антенны передатчика помех в направлении РЛС;
RПАП - удаление передатчика помех от РЛС;
GПРМ(α) - коэффициент усиления приемной антенны в направлении на передатчик помех;
ϕ - коэффициент, учитывающий потери сигнала помехи из-за различия поляризационных характеристик антенн передатчика помех и подавляемой РЛС;

k=1,37⋅10-23 Дж/град - постоянная Больцмана;
Т0=293 К - температура Кельвина;
Ш - коэффициент шума приемника;
∆fПРМ - ширина полосы пропускания приемного устройства РЛС.
При организации бистатической РЛС (разнесенные одна передающая и одна приемная позиции) энергетические соотношения для мощности радиолокационного сигнала, отраженного от воздушного объекта и уровня сигнала помехи на входе приемной РЛС, будут представлены как


где GПАП(α) - коэффициент усиления передающей антенны передатчика помех в направлении приемной РЛС при направлении главного луча на передающую РЛС;
RПРМ - удаление цели от приемной РЛС.
Сравним значения отношений сигнал/шум при организации обзора текущего углового направления однопозиционной и бистатической РЛС в условиях воздействия помех. При этом, пренебрегая различиями в коэффициентах, учитывающих затухание сигналов в атмосфере, и коэффициентах, учитывающих влияние подстилающей поверхности, возникающих из-за разноса приемной и передающей РЛС в пространстве и учитывая их однотипность, получаем следующее выражение (фиг.1):
Значение отношения γразн/γодн зависит от
- пространственного положения цели и постановщика помех, а также геометрического расположения РЛС в системе, которое определяется по известной базе В между позициями;
- коэффициентов усиления передающей антенны передатчика помех в направлении передающей и приемной РЛС. При подавлении активной РЛС в прицельном режиме относительно РЛС, работающей в пассивном режиме, отношение GПАП/GПАП(α) может достигать порядка 11-20 дБ.
Таким образом, при определенных условиях величина отношения сигнал/шум на требуемой дальности в условиях воздействия помех для однопозиционной РЛС по сравнению с величиной сигнал/шум для приемной РЛС в разнесенной системе может достигать 20 дБ. В результате за счет просмотра разнесенными РЛС тех областей пространства (импульсных объемов), в которых обнаружение воздушных объектов в условиях воздействия активных шумовых помех однопозиционной РЛС невозможно, происходит сохранение дальности действия РЛС с ФАР.
Для компенсации энергетических затрат при организации разнесенной системы управление обзором пространства РЛС с ФАР осуществляется следующим образом (фиг.2):
1. Производится оценка дальности обнаружения ВО в требуемом угловом направлении β,ε однопозиционной РЛС с учетом влияния активных помех.



где PCP(β,ε) - средняя мощность, излучаемая передающей антенной РЛС в направлении β, ε;
tобл(β,ε) - время облучения;
ν - коэффициент различимости (отношение сигнал/шум на входе приемника, при котором обеспечивается заданное качество обнаружения);
N0 - спектральная плотность собственных шумов приемника.
2. Определяется область пространства RТР, где обнаружение воздушных объектов в условиях воздействия активных шумовых помех однопозиционной РЛС невозможно

3. Для данной области пространства рассчитывается реализуемая дальность обнаружения для каждой приемной РЛС RПРМi в многопозиционной системе с учетом измеренной помеховой обстановки 

где 
4. Выбор измерительной позиции для разнесенной пары РЛС в системе (вариант обзора пространства) осуществляется по критерию, который обеспечивает наибольшую дальность обнаружения RPPCi приемной РЛС в требуемом угловом направлении β,ε

5. Для сканирования пространства в приемной РЛС формируются два приемных луча - основной и дополнительный. Направление основного (первого) луча соответствует текущему угловому направлению β,ε для данной РЛС. Для дополнительного (второго) луча задаются параметры движения для сканирования требуемой области пространства передающей РЛС. Для этого рассчитываются положения луча ДН β,ε, соответствующие направлениям RPPCi, с которых должен прийти отраженный от цели сигнал, а также моменты времени, прошедшие с начала посылки зондирующего сигнала для данных направлений. Обзор осуществляется по методу сопровождающего импульсного объема.
Заявленный способ обзора позволяет на основе энергетических различий помеховых сигналов, наблюдаемых в разнесенных пунктах приема каждой РЛС, осуществлять обзор пространства путем выбора варианта просмотра углового положения, в результате чего направления, в которых обеспечивается уверенное обнаружение целей на требуемой дальности, обзор пространства осуществляется однопозиционной РЛС, а направления, в которых плотность потока мощности ПАП не обеспечивает обнаружение цели на требуемой дальности, зондируются разнесенными РЛС, обеспечивающие максимальное количество элементов разрешения в зоне обзора РЛС в условиях воздействия активных шумовых помех, осматриваемых с заданным качеством обнаружения при ограниченном энергетическом ресурсе. Таким образом, обеспечивается сохранение дальности действия радиолокационных станций с фазированными антенными решетками в условиях воздействия активных шумовых помех за счет просмотра разнесенными РЛС тех областей пространства, в которых обнаружение воздушных объектов, прикрываемых АШП, однопозиционными РЛС невозможно в условиях ограниченного энергетического ресурса, т.е. получение заявленного технического результата.
К дополнительным преимуществам предлагаемого технического решения относятся следующие возможности:
- организация периодической смены варианта обзора пространства (переход из активного в пассивный режим работы) синхронно по случайному или детерминированному закону с целью сокращения продолжительности излучения конкретной радиолокационной станцией, что обеспечивает повышение скрытности радиолокационной системы в условиях радиолокационного конфликта;
- осуществление распознавания классов целей на основе определения их истинных геометрических размеров за счет получения радиолокационных портретов в разнесенных пунктах приема, что обеспечивает повышение качества распознавания целей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ПРОГРАММНЫМ ОБЗОРОМ ПРИ ЕЕ КОМПЛЕКСНОМ ПРИМЕНЕНИИ С РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ РЕГУЛЯРНОГО ОБЗОРА | 2024 |
|
RU2833509C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ КЛАССОВ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ ДЛЯ МНОГОДИАПАЗОННОГО РАЗНЕСЕННОГО РАДИОЛОКАЦИОННОГО КОМПЛЕКСА С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2020 |
|
RU2741057C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВЕСОВОГО КОЭФФИЦИЕНТА В УСЛОВИЯХ НЕСТАЦИОНАРНОСТИ ПОМЕХОВОЙ ОБСТАНОВКИ | 2022 |
|
RU2807614C1 |
| Способ высокоточной пеленгации постановщика многократной ответно-импульсной помехи | 2020 |
|
RU2740296C1 |
| СПОСОБ И УСТРОЙСТВО ОБЗОРА ПРОСТРАНСТВА В РЛС | 2014 |
|
RU2564130C1 |
| Способ определения разности расстояний до постановщика многократной ответно-импульсной помехи в активно-пассивной многопозиционной радиолокационной системе | 2020 |
|
RU2745108C1 |
| СПОСОБ ЗАЩИТЫ ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПОМЕХ | 2010 |
|
RU2428710C1 |
| АНТЕННАЯ СИСТЕМА И СПОСОБ ЕЕ РАБОТЫ | 2019 |
|
RU2729889C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2002 |
|
RU2240576C2 |
| МНОГОДИАПАЗОННЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2346291C2 |
Изобретение относится к области радиолокации и может быть использовано при обзоре пространства в радиолокационных станциях (РЛС) с фазированными антенными решетками (ФАР). Достигаемый технический результат - сохранение дальности действия РЛС с ФАР в условиях воздействия активных шумовых помех (АШП) при ограниченных энергетических затратах на обзор зоны пространства. Указанный технический результат достигается тем, что обзор пространства основан на взаимодействии разнесенных в пространстве РЛС с ФАР, при этом в процессе обзора РЛС обмениваются информацией о помеховой обстановке, измеренной в каждом угловом направлении зоны обзора. В угловых направлениях, в которых обеспечивается обнаружение целей на требуемой дальности, обзор пространства осуществляется однопозиционной РЛС с ФАР с учетом обеспечения минимума энергетических затрат. Угловые направления, в которых действует постановщик активных помех (ПАП), обзор пространства осуществляется разнесенными РЛС с ФАР в пассивном режиме работы, при этом уточняются и выдаются координаты ПАП в общую информационную систему. В угловых направлениях с "непреодолимой" по мощности помехой, в которых плотность потока мощности ПАП не обеспечивает обнаружение цели на требуемой дальности, обзор пространства осуществляется разнесенными РЛС. Активная РЛС производит обнаружение воздушного объекта на максимальной дальности в условиях воздействия АШП. Область пространства, где обнаружение воздушных объектов в условиях воздействия активных шумовых помех однопозиционной РЛС невозможно, сканируется РЛС, работающей в пассивном режиме. При этом выбирается одна бистатическая РЛС, осуществляющая обзор максимального количества элементов разрешения с заданным качеством обнаружения, но не превышающая выделенный энергетический ресурс. 2 ил.
Способ радиолокационного обзора пространства, основанный на взаимодействии разнесенных в пространстве радиолокационных станций с фазированными антенными решетками, отличающийся тем, что независимо работающие однопозиционные радиолокационные станции с фазированными антенными решетками обмениваются информацией о помеховой обстановке, измеренной в каждом угловом направлении зоны обзора, и с учетом полученной информации на основе оценки степени сохранения дальности действия однопозиционной радиолокационной станции с фазированной антенной решеткой формируются рациональные варианты обзора пространства, при которых угловые направления, в которых обеспечивается уверенное обнаружение целей на требуемой дальности, просматриваются однопозиционной радиолокационной станцией с фазированной антенной решеткой с учетом обеспечения минимума энергетических затрат, а угловые направления, в которых действует постановщик активных помех, просматриваются разнесенными радиолокационными станциями с фазированными антенными решетками в пассивном режиме работы, при этом уточняются и выдаются координаты постановщика активных помех в общую информационную систему, угловые направления с "непреодолимой" по мощности помехой, в которых плотность потока мощности постановщика активных помех ПАП не обеспечивает обнаружение цели на требуемой дальности, зондируются разнесенными радиолокационными станциями, при этом активная радиолокационная станция производит обнаружение воздушного объекта на максимальной дальности в условиях воздействия активных шумовых помех, а область пространства, где обнаружение воздушных объектов в условиях воздействия активных шумовых помех однопозиционной радиолокационной станцией невозможно, сканируется приемной радиолокационной станцией, работающей в пассивном режиме, которая осуществляет обзор максимального количества элементов разрешения с заданным качеством обнаружения, но не превышающая выделенный энергетический ресурс за счет формирования дополнительного луча диаграммы направленности антенны радиолокационной станции с фазированной антенной решеткой, работающей в пассивном режиме, и сканирования данным лучом по методу сопровождающего объема.
| АВЕРЬЯНОВ В.Я | |||
| Разнесенные радиолокационные станции и системы | |||
| Минск, "Наука и техника", 1978, с.52-74, 83-85RU | |||
| СПОСОБ ОСМОТРА ЗОНЫ ОБЗОРА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2345380C1 |
| СПОСОБ УГЛОВОГО РАЗРЕШЕНИЯ ЦЕЛИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ ПРИ ОБЗОРЕ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ БОКОВОГО ОБЗОРА | 2000 |
|
RU2182714C2 |
| ТРЕНАЖЕР МНЕМОСХЕМ | 1990 |
|
RU2101772C1 |
| JP 2008197034 A, 28.08.2008 | |||
| Устройство для уборки вырезанных из забоя блоков к камнерезной машине | 1984 |
|
SU1229347A1 |
| US 20110291890 A1, 01.12.2011. | |||

