Изобретение относится к тормозной системе для автомобиля, способу работы тормозной системы, а также к автомобилю с такой тормозной системой.
В случае многих функций помощи водителю, которые в настоящее время устанавливаются в качестве серийно выпускаемых в автомобилях, водитель автомобиля привлекается в качестве уровня возврата к прежнему состоянию в случае аварийной ситуации, например, в случае технического дефекта функции помощи водителю. Это означает, что если ошибка возникает во время приведения в действие функции помощи водителю, соответствующее сообщение выводится водителю, и водитель должен взять на себя задачу соответствующей функции помощи водителю.
Однако в будущем в случае функций помощи водителю, которые также предназначены для автономного управления или дистанционного обслуживания транспортного средства, водитель транспортного средства не всегда сможет привлекаться в качестве уровня возврата к прежнему состоянию, поскольку водитель, например, больше не будет находиться в автомобиле или мог бы вмешаться только с задержкой.
Из DE 10 2014 221 007 А1 уже известно, что в случае функции помощи водителю, служащей в качестве пилота в пробке, наряду со стандартной целевой траекторией определяется дополнительная целевая траектория аварийного режима. Для этого функция пилота в пробке всегда определяет две стандартные целевые траектории на основе данных об окружающей среде автомобиля, сравнивает эти две целевые траектории друг с другом и выбирает одну из двух целевых траекторий, на основе которой автомобиль управляется по меньшей мере частично автоматически. Эта процедура обеспечивает возможность того, что в случае неисправности в одном из устройств обработки функции пилота в пробке или в случае неисправности в компоненте транспортного средства можно использовать другую, не выбранную стандартную целевую траекторию, и на основе этой целевой траектории аварийного режима автомобиль может управляться далее.
В случае многих функций помощи водителю, которые обеспечивают по меньшей мере частично автоматическое управление автомобилем, в аварийной ситуации менее важно, чтобы функция помощи водителю или другой блок управления автомобилем имели план действий в аварийных ситуациях, согласно которому осуществляется дальнейшее управление автомобилем. Скорее, основное внимание уделяется определению системы и процедуры, с помощью которых автономно управляемые автомобили могут максимально быстро и, при необходимости, с учетом текущей дорожной ситуации тормозиться до остановки и затем удерживаться в состоянии остановки.
Поэтому задачей изобретения является создание системы для автомобиля, с которой эксплуатация автомобиля с функцией автономного или дистанционного управления автомобилем становится особенно безопасной.
В соответствии с изобретением эта задача решается с помощью тормозной системы для автомобиля, которая содержит первичную систему и вторичную систему, каждая из которых предназначена для автоматического торможения автомобиля до остановки в соответствии с аварийной функцией и затем блокировки в состоянии покоя (остановки), причем по меньшей мере первичная система выполнена так, чтобы при возникновении ошибки в функции автомобиля, предназначенной для автономного управления или дистанционного управления автомобилем, выполнять аварийную функцию, причем вторичная система в этом случае предназначена для выполнения аварийной функции при возникновении ошибки в первичной системе. Таким образом, тормозная система, предлагаемая согласно изобретению, является тормозной системой, которая состоит из двух подсистем торможения. Обе подсистемы торможения, то есть как основная тормозная система, называемая первичной системой, так и вспомогательная тормозная система, называемая вторичной системой, предназначены для того, чтобы останавливать автомобиль в соответствии с заранее определенной процедурой торможения и блокировать его от перекатывания.
Кроме того, первичная система способна выполнять заданную процедуру (программу) торможения, когда в функции автомобиля возникает ошибка. При этом функция автомобиля представляет собой функцию помощи водителю, с помощью которой возможно автономное или дистанционно контролируемое управление транспортным средством. Кроме того, предусмотрено, что тормозная система спроектирована таким образом, что в случае неисправности в функции автомобиля и в случае дополнительно возникающей неисправности в первичной системе, вторичная система останавливает автомобиль на основании определенной для него процедуры торможения и удерживает его в состоянии покоя.
Эта резервная тормозная система может использоваться, например, в сочетании с функцией автомобиля, такой как система помощи при парковке или адаптивная система регулирования скорости. Если, например, желательна автономная парковка автомобиля без водителя на борту в соответствии с функцией клиента, система торможения позволяет тормозить автомобиль первичной системой в случае отказа соответствующей функции автомобиля, например, если прерывается радиоконтакт между устройством дистанционного управления водителя и устройством управления функции автомобиля, и блокировать его в состоянии покоя. В случае дополнительной технической неисправности в первичной системе, автомобиль также может быть остановлен вторичной системой, то есть на основе заранее определенной процедуры торможения вторичной системы.
В дополнительном предпочтительном варианте осуществления изобретения предусмотрено, что аварийная функция предусматривает полное торможение при скорости автомобиля ниже заданной скорости и затем блокировку автомобиля в состоянии покоя. Если автомобиль движется медленнее, чем с определенной максимальной скоростью, и выполняется по меньшей мере одно из упомянутых условий для торможения и последующей блокировки автомобиля в состоянии покоя, в соответствии с заранее определенной процедурой торможения предусматривается, что автомобиль тормозится до остановки как можно быстрее и затем блокируется от перекатывания. Если автомобиль находится, например, в процессе парковки, который выполняется с помощью дистанционно управляемой системы помощи при парковке, то теперь автомобиль может резко тормозиться в соответствии с заранее определенной процедурой торможения. Полное торможение, выполняемое в соответствии с аварийной функцией, является своего рода аварийной остановкой автомобиля. Такая функция аварийной остановки является особенно предпочтительной, если автомобиль паркуется дистанционно с помощью функции автомобиля, то есть водитель транспортного средства не может сам тормозить автомобиль в аварийной ситуации, или если автомобиль управляется функцией автомобиля на улице, предназначенной для игр (закрытой для проезда автотранспорта), на которой целесообразна максимально быстрая остановка автомобиля без вмешательства водителя с временной задержкой. Диапазон скоростей, в котором предусмотрена эта функция аварийной остановки, лежит в диапазоне маневрирования транспортного средства, то есть при скоростях предпочтительно до 15 км/ч.
Другой предпочтительный вариант осуществления тормозной системы, предлагаемой в соответствии с изобретением, предусматривает, что аварийная функция при скорости автомобиля, большей или равной предварительно заданной скорости, обеспечивает торможение автомобиля с учетом текущей дорожной ситуации до остановки и затем блокировку его в состоянии покоя. Начиная с определенной максимальной скорости также предусматривается, что на основе заранее заданной процедуры торможения, которая учитывает текущую дорожную ситуацию, автомобиль тормозится в соответствии с этой дорожной ситуацией и затем блокируется от перекатывания. Если, например, автомобиль полностью автономно управляется на автомагистрали посредством функции автомобиля, при активации аварийной функции, не происходит внезапное полное торможение автомобиля, а скорее происходит процесс торможения, адаптированный к текущей скорости и текущему объему движения. При этом процедура торможения могла бы указывать, к какому времени и на каком расстоянии автомобиль тормозится до определенной скорости, пока он не остановится. Для определения аварийной функции для этой цели может использоваться информация от различных датчиков, например от внешних камер автомобиля, с помощью которых можно отслеживать текущую дорожную ситуацию. Также возможно, что аварийная функция определяется с учетом данных от Car-to-Car (межавтомобильной) связи или Car-to-X (от автомобиля к объекту) связи. При более высоких скоростях автомобиля, то есть обычно от скоростей предпочтительно 15 км/ч, при неисправности функции автомобиля или первичной системы, предусмотрено, что автомобиль тормозится в соответствии с определенным аварийным движением, а затем блокируется в состоянии покоя. Такое торможение автомобиля, адаптированное к текущей дорожной ситуации, может снизить вероятность вторичных аварий, например, из-за дорожно-транспортных происшествий вследствие наезда других участников дорожного движения, по сравнению с процедурой аварийной остановки.
В дополнительном варианте осуществления изобретения предусмотрено, что первичная система и вторичная система предназначены для выполнения по меньшей мере одной подфункции функции автомобиля в ходе выполнения аварийной функции. Когда активируется одна из двух подсистем торможения, в дополнение к предварительно заданной процедуре торможения будет продолжать выполняться задание функции автомобиля. Если, например, подфункция функции автомобиля является функцией, которая управляет торможением автомобиля, эта функция также может выполняться первичной или вторичной системой. Однако если первичная и/или вторичная системы являются тормозными системами, которые также могут влиять на управление автомобилем или влиять на скорость автомобиля, аварийная функция также может быть траекторией аварийного движения. Для этой цели функция автомобиля может отправлять постоянно обновляемые траектории в первичную и вторичную систему, с помощью которых можно управлять и тормозить автомобиль в случае ошибки функции автомобиля. Тот факт, что первичная и вторичная системы могут выполнять подфункции функции автомобиля, означает, что они представляют собой дополнение функции автомобиля, что может быть особенно полезным для безопасной остановки автомобиля в аварийной ситуации.
Другой предпочтительный вариант осуществления тормозной системы согласно изобретению предусматривает, что вторичная система предназначена для выполнения аварийной функции даже в случае неисправности первичной системы, даже если неисправность в функции автомобиля не возникла. Следовательно, вторичная система способна останавливать автомобиль, когда функция автомобиля работает должным образом, то есть при надлежащем функционировании активированной функции помощи водителю, в случае неисправности в первичной системе, на основе заданной для нее процедуры торможения, и затем блокировать его от перекатывания. Если, например, автомобиль медленно перемещается в гараже с помощью дистанционно управляемой системы помощи в парковке, и происходит непредвиденный отказ первичной системы, то с помощью вторичной системы осуществляется немедленная аварийная остановка автомобиля. Это обеспечивает особенно безопасное вождение автомобиля, особенно в ситуациях, когда функция автомобиля управляет автомобилем дистанционно, без водителя, находящегося в автомобиле. Если, с другой стороны, автомобиль автономно управляется на многополосной скоростной автомагистрали с круиз-контролем для поддержки безопасной дистанции при скоростях выше заданной скорости, в случае неисправности в первичной системе аварийная функция, которая доступна для вторичной системы и адаптирована к текущей ситуации движения, выполняется вторичной системой, и, тем самым, автомобиль также, но с временной задержкой, тормозится и блокируется в состоянии покоя.
В дополнительном варианте осуществления изобретения предусмотрено, что первичная система предназначена для выполнения аварийной функции даже в случае ошибки вторичной системы, даже если в функции автомобиля не возникает ошибки. Поэтому предусмотрено, что при надлежащем функционировании функции автомобиля, основная тормозная система уже активирует заданную для нее процедуру торможения, если сообщается только о дефекте во вспомогательной тормозной системе. Например, если функцией транспортного средства является система помощи при парковке, которая используется с дистанционным управлением в гараже, автомобиль будет останавливаться немедленно в случае отказа вторичной системы с помощью функции аварийного останова, даже если основная система и функция автомобиля продолжают функционировать должным образом. Это обеспечивает дополнительную защиту при вождении с функцией автомобиля для автономного управления или дистанционного управления автомобилем, поскольку при этом для приведения в действие соответствующей функции автомобиля имеется обязательное условие, что доступны две системы для торможения и блокировки транспортного средства в состоянии покоя.
В другом предпочтительном варианте осуществления изобретения первичная система предназначена для управления всеми средствами, предназначенными для торможения и/или блокировки автомобиля в состоянии покоя. Поэтому предусматривается, что управление первичной системой может осуществлять доступ ко всем исполнительным механизмам тормозов или удерживающим механизмам автомобиля, как к их управлению, так и к их механизмам запуска. Поэтому даже в безошибочном состоянии функциональное программное обеспечение первичной системы, которое является, например, функциональным программным обеспечением управления динамикой движения (англ. ESC, «электронный контроль устойчивости»), может управлять всеми другими компонентами транспортного средства, предусмотренными для торможения или блокировки автомобиля. Этими другими компонентами могут быть, например, электрический стояночный тормоз (англ. EPB, «электрический стояночный тормоз»), электрический усилитель тормозного усилия (eBKV) или парковочный замок. В случае отдельного отказа, например, при отказе соответствующей коммуникационной шины, первичная система может продолжать получать доступ к отдельным, не дефектным компонентам автомобиля обеих подсистем торможения, которые предусмотрены для торможения или блокировки автомобиля. Если, например, механизм удержания первичной системы был неисправен, первичная система могла бы использовать механизм удержания вторичной системы, чтобы блокировать автомобиль в состоянии покоя после его торможения. Это обеспечивает приоритетное управление тормозной системой путем управления первичной системой, что позволяет тормозной системе реагировать особенно быстро в аварийной ситуации.
Другой предпочтительный вариант осуществления изобретения предусматривает, что вторичная система предназначена для торможения транспортного средства посредством приведения в действие электрического усилителя тормозного усилия. Если автомобиль тормозится вторичной системой, это делается с помощью электрического усилителя тормозного усилия (eBKV). В дополнение к электрическому усилителю тормозного усилия в качестве исполнительного механизма тормоза также возможен электрический стояночный тормоз (англ. EPB, «электрический стояночный тормоз») или другой тормоз.
В дополнительном варианте осуществления изобретения предусмотрено, что вторичная система предназначена для того, чтобы блокировать автомобиль в состоянии покоя посредством активации парковочного замка. Таким образом, предусмотрено, что вторичная система для блокировки автомобиля в состоянии покоя применяет блокировку коробки передач. Однако электрический стояночный тормоз (англ. EPB, «электрический стояночный тормоз») или другой стояночный тормоз также может быть подходящим в качестве удерживающего механизма. С помощью этого удерживающего механизма можно добиться того, чтобы автомобиль после его торможения надежно удерживался в состоянии покоя и блокировался от возможного перекатывания.
В другом предпочтительном развитии тормозной системы предусмотрено, что первичная и/или вторичная система предназначена для выполнения аварийной функции, когда возникает по меньшей мере одна из следующих ошибок функции автомобиля: ошибка в коммуникации с функцией автомобиля, превышение предельного значения скорости автомобиля, заданного функцией автомобиля, запрашивание выполнения аварийной функции посредством функции автомобиля. Первичная и/или вторичная система затем начинает торможение автомобиля в соответствии с его заданной процедурой торможения, если наблюдается один из следующих дефектов в функционировании активированной функции автомобиля. С одной стороны, эти дефекты могут быть проблемами в обмене данными между первичной и/или вторичной системой и функцией автомобиля. С другой стороны, аварийная функция может запускаться, если установлено, что текущая скорость автомобиля превышает максимальную скорость, заданную функцией автомобиля, или аварийная функция вызывается функцией автомобиля.
Ошибка в коммуникации с функцией автомобиля возникает, например, в случае сбоя соответствующей коммуникационной шины или сбоя других частей управления первичной и/или вторичной системы или функции автомобиля. Отклонение от предельного значения, заданного функцией транспортного средства, возникает, например, если функцией транспортного средства является система помощи при парковке, которая имеет предписание выполнять процесс парковки только в определенном диапазоне скоростей, например, от 0 км/ч до 10 км/ч. Если теперь установлено превышение значения скорости, например, из-за ошибки в регулировании скорости, то это отклонение от предварительно заданной максимальной скорости автомобиля вызвало бы аварийную остановку системой помощи при парковке посредством первичной или вторичной системы. В другом сценарии активная функция автомобиля запрашивает, чтобы первичная и/или вторичная система выполняла аварийную функцию. Например, в случае многих дистанционно управляемых систем помощи при парковке предусмотрено, что управление транспортным средством осуществляется автоматически только при нажатии кнопки на ключе автомобиля или в приложении для смартфона, связанном с функцией автомобиля. Как только этот элемент активации больше не нажимается, соответствующий сигнал передается в первичную систему и активируется аварийная функция первичной системы, то есть выполняется аварийная остановка автомобиля. Поскольку при техническом дефекте соответствующего типа в функции автомобиля возникает ошибка коммуникации с первичной и/или вторичной системой и/или отклонение от предварительно заданного предельного значения функции автомобиля, автомобиль при отказе функции автомобиля надежно останавливается с помощью первичной и/или вторичной системы в соответствии с предоставленной аварийной функцией и блокируется в состоянии покоя.
В другом варианте осуществления изобретения предусмотрено, что первичная и вторичная системы предназначены для выполнения аварийной функции, когда в соответствующих системах возникает по меньшей мере одна из следующих ошибок: ошибка в коммуникации между первичной и вторичной системами, дефект первичной системы, дефект вторичной системы. Первичная или вторичная система, таким образом, запускает заданную ей процедуру торможения для торможения автомобиля и блокировки автомобиля в состоянии покоя, если в первичной и вторичной системе устанавливается один из следующих дефектов: аварийная функция активируется, если возникают проблемы с обменом данными между первичной и вторичной системами, происходит сбой системного компонента первичной системы или сбой системного компонента вторичной системы. Проблемы коммуникации между первичной и вторичной системами возникают, например, при отказе функций соответствующего управляющего программного обеспечения или могут возникать из-за технических дефектов в управлении двумя подсистемами торможения или из-за неисправностей в линии связи, таких как короткое замыкание в коммуникационной шине. Дефекты в первичной или вторичной системе возникают, например, из-за технических неисправностей и ошибок в соответствующих тормозах и удерживающих механизмах. Если, таким образом, определяется отказ одной из обеих подсистем торможения, то всегда инициируется торможение и блокировка автомобиля с помощью другой подсистемы торможения, так что автомобиль не может двигаться автономно или с дистанционным управлением только с одной доступной системой торможения. Это служит дополнительной гарантией в случае автономной и/или дистанционно управляемой эксплуатации автомобиля.
Автомобиль в соответствии с изобретением содержит тормозную систему в соответствии с изобретением или предпочтительный вариант осуществления тормозной системы в соответствии с изобретением.
В способе в соответствии с изобретением для работы тормозной системой в соответствии с изобретением или в предпочтительном варианте осуществления тормозной системы в соответствии с изобретением первичная система выполняет аварийную функцию при возникновении ошибки в функции автомобиля, предназначенной для автономного управления и дистанционного управления автомобилем, причем вторичная система в этом случае вместо этого выполняет аварийную функцию, когда ошибка происходит в первичной системе. Поэтому тормозная система работает таким образом, что в случае ошибочного функционирования функции автомобиля, такой как функция помощи автомобиля, которая обеспечивает возможность независимого и управляемого пультом дистанционного управления движения автомобиля, первичная система тормозит автомобиль в соответствии с заданной ей процедурой торможения и останавливает его, причем вторичная система в этом случае активирует заданную ей процедуру торможения и, таким образом, берет на себя торможение автомобиля и последующее блокирование в состоянии покоя, если бы первичная система была неисправна.
Изобретение также включает в себя дальнейшие усовершенствования способа согласно изобретению, которые имеют признаки, которые уже были описаны в связи с дальнейшими усовершенствованиями тормозной системы согласно изобретению. По этой причине соответствующие усовершенствования способа в соответствии с изобретением не описаны здесь снова.
Два примера осуществления изобретения описаны ниже. Показано:
Фиг.1 схематичное представление тормозной системы автомобиля при скорости автомобиля ниже предварительно заданной скорости;
Фиг.2 схематичное представление системных состояний первичной системы тормозной системы;
Фиг.3 схематичное представление системных состояний вторичной системы тормозной системы;
Фиг.4 схематичное представление тормозной системы при скорости транспортного средства, большей или равной предварительно заданной скорости.
Два примера осуществления, поясненные ниже, являются двумя предпочтительными вариантами осуществления изобретения. В примерах осуществления каждый из описанных компонентов вариантов осуществления представляет отдельные признаки изобретения, которые должны рассматриваться независимо друг от друга, которые также дополнительно развивают изобретение независимо друг от друга и поэтому также должны рассматриваться отдельно или в отличной от показанной комбинации как часть изобретения. Кроме того, описанные варианты осуществления также могут быть дополнены другими признаками изобретения, которые уже были описаны.
На чертежах элементы с одинаковыми функциями обозначены одинаковыми ссылочными позициями.
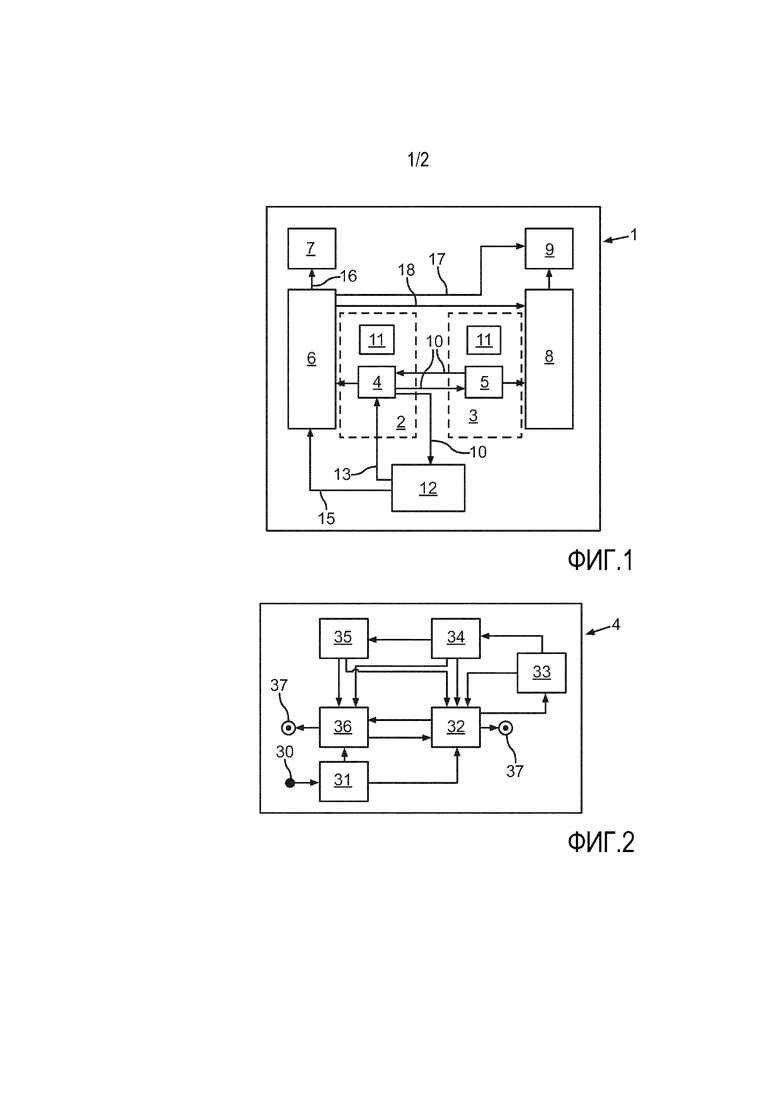
На фиг.1 показана тормозная система 1 для автомобиля. Тормозная система 1 имеет первичную систему 2 и вторичную систему 3. Управление 4 первичной системы 2, которое, например, является средством управления динамикой движения, управляет тормозным приводом 6 управления динамикой движения и удерживающим механизмом, который может быть электрическим стояночным тормозом 7. Аналогично, управление 5 вторичной системы 3 может управлять дополнительным тормозным приводом, который является, например, электрическим усилителем 8 тормозного усилия. Парковочный замок 9 может быть предусмотрен, например, в качестве удерживающего механизма, управляемого управлением 5 вторичной системы 3. Управления 4 и 5 первичной и вторичной систем 2 и 3, которые также могут называться их конечными автоматами (автомат состягния), обмениваются сообщениями о состоянии друг с другом. Этот обмен данными представлен двумя стрелками 10.
То, насколько управления 4 и 5 первичной и вторичной систем 2 и 3 функционируют правильно, дополнительно контролируется соответствующими блоками 11 контроля. Если эти блоки контроля обнаруживают ошибку, например, из-за неисправного микроконтроллера, эта ошибка передается в управляющее программное обеспечение соответствующей подсистемы и может привести к запуску аварийной функции. В соответствии с предписаниями аварийной функции автомобиль останавливается и затем блокируется в неподвижном состоянии.
Управление 4 первичной системы 2 также осуществляет обмен данными с функцией 12 автомобиля, которая в качестве функции клиента выполняет задачу, поставленную пользователем автомобиля, такую как дистанционно управляемая парковка автомобиля в гараже. Если функция 12 автомобиля требует аварийной остановки автомобиля, соответствующий сигнал 13 данных отправляется функцией 12 автомобиля на управление 4 первичной системы 2. Кроме того, управление 4 первичной системы 2 передает свои данные 10 состояния на функцию 12 автомобиля. Кроме того, функция 12 автомобиля передает нормальную функцию 15 функции 12 автомобиля на управление 6 динамикой движения. Эта нормальная функция 15 может быть, например, целевой (номинальной) скоростью или максимальной или минимальной скоростью автомобиля.
Также предусмотрено, что первичная система 2 может управлять не только электрическим стояночным тормозом 7, но и электрическим усилителем 8 тормозного усилия и парковочным замком 9 с помощью своего управления 4 через тормозной привод 6 управления динамикой движения. Для этой цели соответствующие управляющие сигналы 16, 17 и 18 могут отправляться через тормозной привод 6 управления динамикой движения на соответствующие удерживающие механизмы, электрический усилитель 8 тормозного усилия и парковочный замок 9, а также на электрический стояночный тормоз 7.
С помощью тормозной системы 1, показанной на фиг.1, при скорости автомобиля ниже заданной скорости, которая обычно составляет около 15 км/ч, в соответствии с аварийной функцией выполняется полное торможение автомобиля и последующая блокировка автомобиля в состоянии покоя, управляемое управлениями 4 или 5 первичной и вторичной системы 2 и 3 или функции 12 автомобиля. Таким образом, на фиг.1 показана тормозная система аварийного останова.
На фиг.2 показаны отдельные состояния управления 4 первичной системы 2 по отношению к работе тормозной системы 1 в качестве тормозной системы аварийного останова, то есть при скоростях автомобиля ниже заданной скорости. Управление 4 первичной системы 2 может принимать шесть различных состояний, между которыми сообщения состояния, данные или сигналы передаются в соответствии с показанными стрелками. После запуска 30 функции автомобиля управление 4 первичной системы 2 инициализируется и переходит в состояние 31 «инициализация». Если все системные компоненты первичной системы 2 доступны без ошибок и управление 5 вторичной системы 3 сообщает управлению 4 первичной системы 2, что оно находится в состоянии 32 «доступно» (см. фиг.3 для состояний управления 5 вторичной системы 3), управление 4 первичной системы 2 переходит из состояния 31 «инициализация» в состояние 32 «доступно».
Если теперь активирована функция 12 автомобиля, которая запрашивает контроль ее функции тормозной системой 1, управление 4 первичной системы 2 переходит из состояния 32 «доступно» в состояние 33 «запросить вторичную систему», если сообщение о состоянии управления 5 вторичной системы 3 и далее отправляет состояние 32 «доступно» на управление 4 первичной системы 2, и текущая скорость автомобиля ниже целевой скорости, заданной функцией 12 автомобиля. Управление 4 первичной системы 2 затем меняет свое состояние с состояния 33 «запросить вторичную систему» на состояние 34 «пассивный контроль», как только управление 5 вторичной системы 3 сообщает, что он находится в состоянии 34 «пассивный контроль». Состояние 34 «пассивный контроль» соответствует нормальному состоянию управления 4 первичной системы 2.
При безошибочном функционировании функции 12 автомобиля система переходила бы из состояния 34 «пассивный контроль» в состояние 32 «доступно», как только функция 12 автомобиля заканчивается. Например, если функция 12 автомобиля представляет собой систему помощи при парковке, то системное состояние управления 4 первичной системы 2 изменилось бы на «доступно» 32, как только процесс парковки завершен.
Состояние управления 4 первичной системы 2 изменяется с состояния 34 «пассивный контроль» на состояние 35 «активный запуск», когда передаются сигналы, которые указывают на ошибку во вторичной системе 3, например на то, что управление 5 вторичной системы 3 выходит из состояния 34 «пассивный контроль», или если во время обмена данными с управлением 5 вторичной системы 3 возникает ошибка связи, возникают проблемы коммуникации между управлением 4 первичной системы 2 и функцией 12 автомобиля, устанавливается превышение целевого значения скорости, переданного функцией 12 автомобиля, или функция 12 автомобиля запрашивает аварийную остановку управлением 4 первичной системы 2.
В состоянии 35 «активный запуск» автомобиль замедляется до остановки и блокируется в состоянии покоя. Как только автомобиль оказывается в состоянии покоя, управление 4 первичной системы 2 может, если нет технического дефекта, переключиться обратно в состояние 32 «доступно». Однако если автомобиль находится в состоянии покоя, и дополнительно было установлено, что либо управление 5 вторичной системы 3 сообщает состояние 36 «дефект системного компонента», существует ошибка коммуникации с управлением 5 вторичной системы 3, или было установлено, что по меньшей мере один компонент первичной системы 2 и/или тормозной привод 6 управления динамикой движения и/или электрический стояночный тормоз 7 неисправен, управление 4 первичной системы 2 изменяет свое состояние с «активного запуска» 35 на «дефект системного компонента» 36. В случае одного из упомянутых дефектов или ошибок управление 4 первичной системы 2 также может немедленно перейти из состояния 34 «пассивный контроль» в состояние 36 «дефект системного компонента».
Как только все компоненты первичной системы 2, а также тормозной привод 6 управления динамикой движения и электрический стояночный тормоз 7 снова работоспособны, и управление 5 вторичной системы 3 сообщает состояние 32 «доступно», управление 4 первичной системы 2 переходит из состояния 36 «дефект системного компонента» в состоянии 32 «доступно». Если управление 4 первичной системы 2 распознает уже в состоянии 32 «доступно», что управление 5 вторичной системы 3 находится в состоянии «дефект системного компонента», или возникла ошибка коммуникации с управлением 5 вторичной системы 3, система переходит непосредственно из состояния 32 «доступно» в состояние 36 «дефект системного компонента». Как в состоянии 32 «доступно» 32, так и в состоянии 36 «дефект системного компонента» можно завершить действие управления 4 первичной системы 2. Такое завершение 37 функции осуществляется, например, путем выключения автомобиля.
Также предусмотрено, что управление 4 первичной системы 2 из состояния 33 «запросить вторичную систему» либо напрямую посредством завершения функции 12 автомобиля, либо по истечении заданного максимального периода времени в случае отсутствия обратной связи от управления 5 вторичной системы 3, например, если возникает соответствующая ошибка в коммуникации между управлениями 4 и 5 первичной и вторичной систем 2 и 3, возвращается обратно в системное состояние 32 «доступно».
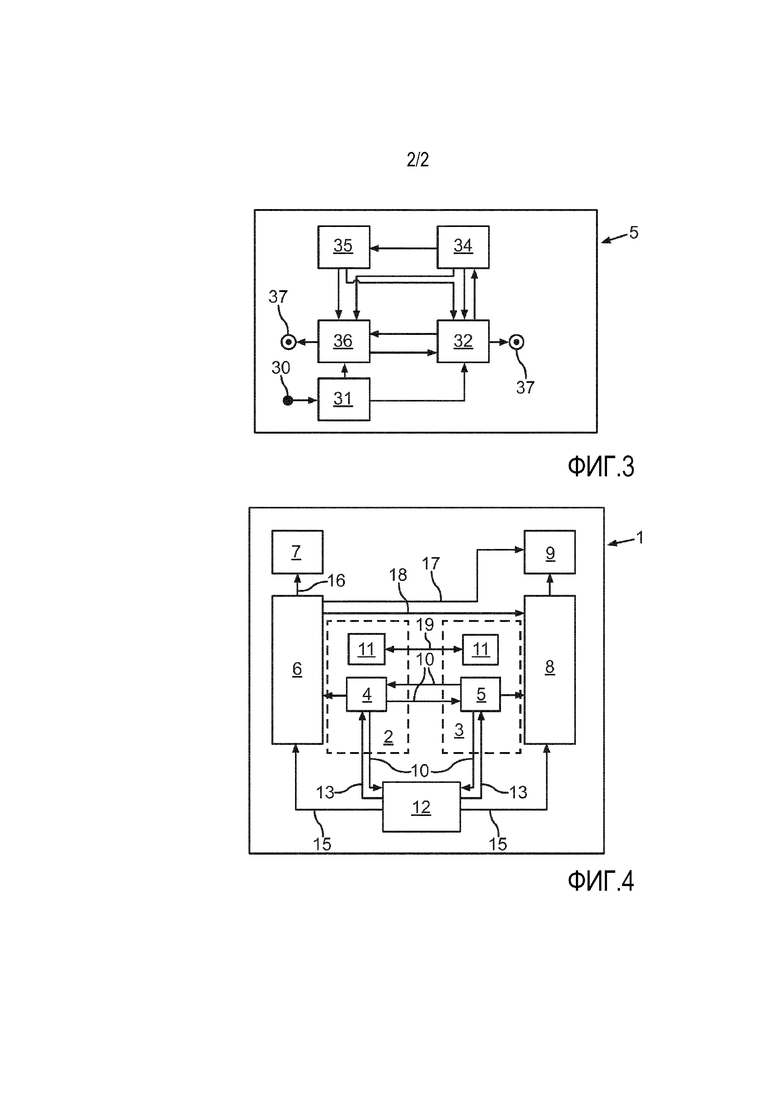
На фиг.3 показаны пять различных состояний управления 5 вторичной системы 3. Сообщения о состоянии, данные и сигналы передаются между этими состояниями в соответствии с показанными стрелками. Управление 5 вторичной системы 3 переходит из состояния 31 «инициализация» в состояние 32 «доступно», как только сообщается, что все компоненты вторичной системы 3, электрического усилителя 8 тормозного усилия и парковочного замка 9 функционируют безошибочно. Когда управление 5 вторичной системы 3 находится в состоянии 32 «доступно» и запрашивается управлением 4 первичной системы 2, управление 5 вторичной системы 3 переходит из состояния 32 «доступно» в состояние 34 «пассивный контроль».
Управление 5 вторичной системы 3 переходит из состояния 34 «пассивный контроль» обратно в состояние 32 «доступно», когда управление 4 первичной системы 2 переходит в состояние 32 «доступно». Однако если управление 4 первичной системы 2 сообщает, что оно находится в состоянии 36 «дефект системного компонента», или установлена ошибка коммуникации с управлением 4 первичной системы 2, управление 5 вторичной системы 3 переходит из состояния 34 «пассивный контроль» в состояние 35 «активный запуск».
В состоянии «активный запуск» автомобиль тормозится до остановки и блокируется в состоянии покоя. Управление 5 вторичной системы 3 может перейти из состояния 35 «активный запуск» обратно в состояние 32 «доступно», как только автомобиль оказывается в состоянии покоя. Если сама вторичная система 3 не имеет каких-либо датчиков, с помощью которых может устанавливаться, находится ли автомобиль в состоянии покоя, может быть установлена максимальная длительность замедления, то есть максимальная длительность торможения, после которой управление 5 вторичной системы 3 переключается из состояния 35 «активный запуск» обратно в состояние 32 «доступно».
При дефекте компонента вторичной системы 3 и/или электрического усилителя 8 тормозного усилия и/или парковочного замка 9, управление 5 вторичной системы 3 может либо напрямую перейти из состояния «пассивный контроль» в состояние 36 «дефект системного компонента», либо из состояния 35 «активный запуск» перейти в состояние 36 «дефект системного компонента». Как только все компоненты вторичной системы 3, а также электрический усилитель 8 тормозного усилия и парковочный замок 9 снова безошибочно функционируют, то есть становятся доступными, системное состояние снова изменяется с «дефект системного компонента» на «доступно» 32. Если управление 5 уже в состоянии 32 «доступно» устанавливает, что компонент вторичной системы 3 и/или электрический усилитель 8 тормозного усилия и/или парковочный замок 9 неисправны (дефектны), управление 5 вторичной системы 3 переходит непосредственно из состояния 32 «доступно» в состояние 36 «дефект системного компонента».
Аналогично управлению 4 первичной системы 2, в управлении 5 вторичной системы 3 также предусмотрено, что запуск 30 функции активирует функцию, например, путем запуска двигателя, и что она может быть завершена путем перехода от системного состояния 32 «доступно» или «дефекта системного компонента» 36 к завершению 37 функции.
Тормозная система 1 снова показана на фиг.4, но по сравнению с фиг.1 дополнительно проиллюстрированы все пути данных и сигналов, которые активируются при скорости автомобиля, превышающей или равной предварительно заданной скорости. При скоростях, обычно от 15 км/ч, в соответствии с аварийной функцией, переданной функцией 12 автомобиля, предусмотрено торможение автомобиля до остановки с учетом текущей дорожной ситуации, а также последующая блокировка автомобиля в состоянии покоя. Таким образом, на фиг.4 показана тормозная система аварийного движения.
Эта тормозная система аварийного движения отличается от тормозной системы аварийного останова, показанной на фиг.1, тем, что функция 12 автомобиля обменивается сообщениями о состоянии, данными и сигналами не только с управлением 4 первичной системы 2, но также с управлением 5 вторичной системы 3. В соответствии с тормозной системой аварийного движения функция 12 автомобиля определяет аварийные функции для первичной и вторичной систем 2 и 3, в соответствии с которыми автомобиль тормозится в зависимости от текущей дорожной ситуации, а затем блокируется в состоянии покоя. Эти аварийные функции передаются как управлению 4 первичной системы 2, так и управлению 5 вторичной системы 3, что показано с помощью стрелок 13. Функция 12 автомобиля принимает как сообщение о состоянии управлению 4 первичной системы 2 (см. соответствующую стрелку 10), так и сообщение о состоянии управления 5 вторичной системы 3 (см. соответствующую стрелку 10). Нормальная функция 15, заданная функцией 12 автомобиля, которая может быть, например, целевой скоростью или максимальной или минимальной скоростью автомобиля, передается в соответствии с тормозной системой аварийного движения как на тормозной привод 6 управления динамикой движения (см. соответствующую стрелку 15), так и на электрический усилитель 8 тормозного усилия, который управляется управлением 5 вторичной системы 3 (см. соответствующую стрелку 15).
Если в функции 12 автомобиля возникает ошибка, управление 4 первичной системы 2, основываясь на аварийной функции, последней переданной ему функцией 12 автомобиля, вызовет торможение автомобиля с помощью тормозного привода 6 управления динамикой движения. Если, в дополнение к ошибке в функции 12 автомобиля, также возникает дефект в первичной системе 2, например, в ее управлении 4 и/или тормозном приводе 6 управления динамикой вождения и/или электрическом стояночном тормозе 7, автомобиль может тормозиться на основе аварийной функции, переданной управлению 5 вторичной системы 3, посредством электрического усилителя 8 тормозного усилия, управляемого управлением 5 вторичной системы 3.
Согласно тормозной системе аварийного движения также предусмотрено, что блоки 11 контроля первичной и вторичной систем 2 и 3 каждый обмениваются своими системными состояниями 19 через коммуникационное соединение. Поскольку функция 12 автомобиля находится в контакте как с управлением 4 первичной системы 2, так и с управлением 5 вторичной системы 3, в случае ошибки в одной из обеих тормозных подсистем функция 12 автомобиля может продолжать обмениваться данными с безошибочной тормозной подсистемой, например, передавать управлению 4 или 5 соответствующей тормозной подсистемы 2 и 3 постоянно обновляемые аварийные функции.
Торможение и последующая блокировка автомобиля в состоянии покоя были описаны в качестве примера с использованием тормозного привода 6, управляемого системой управления динамикой движения, электрического усилителя 8 тормозного усилия, электрического стояночного тормоза 7 и парковочного замка 9, что является одним из многочисленных возможностей выполнения.
Перечень ссылочных позиций
1 тормозная система
2 первичная система
3 вторичная система
4 управление
5 управление
6 тормозной привод
7 электрический стояночный тормоз
8 электрический усилитель тормозного усилия
9 парковочный замок
10 сообщение о состоянии
11 блок контроля
12 функция автомобиля
13 сообщение о состоянии
15 нормальная функция
16 управляющий сигнал
17 управляющий сигнал
18 управляющий сигнал
19 системное состояние
30 запуск функции
31 состояние «инициализация»
32 состояние «доступно»
33 состояние «запросить вторичную систему»
34 состояние «пассивный контроль»
35 состояние «активный запуск»
36 состояние «дефект системного компонента»
37 завершение функции
Изобретение относится к тормозной системе (1) для автомобиля, способу работы такой тормозной системы (1) и автомобилю с такой тормозной системой (1), причем тормозная система (1) содержит первичную систему (2) и вторичную систему (3), каждая из которых предназначена для автоматического торможения автомобиля в соответствии с аварийной функцией до остановки и затем для его блокировки в состоянии покоя. По меньшей мере, первичная система (2) предназначена для выполнения аварийной функции при возникновении ошибки в функции (12) автомобиля, предназначенной для автономного управления или дистанционного управления автомобилем. Вторичная система (3) предназначена для выполнения аварийной функции при возникновении дополнительной ошибки в первичной системе (2). Технический результат - создание тормозной системы с функцией автономного или дистанционного управления автомобилем, с которой эксплуатация автомобиля становится особенно безопасной. 3 н. и 9 з.п. ф-лы, 4 ил.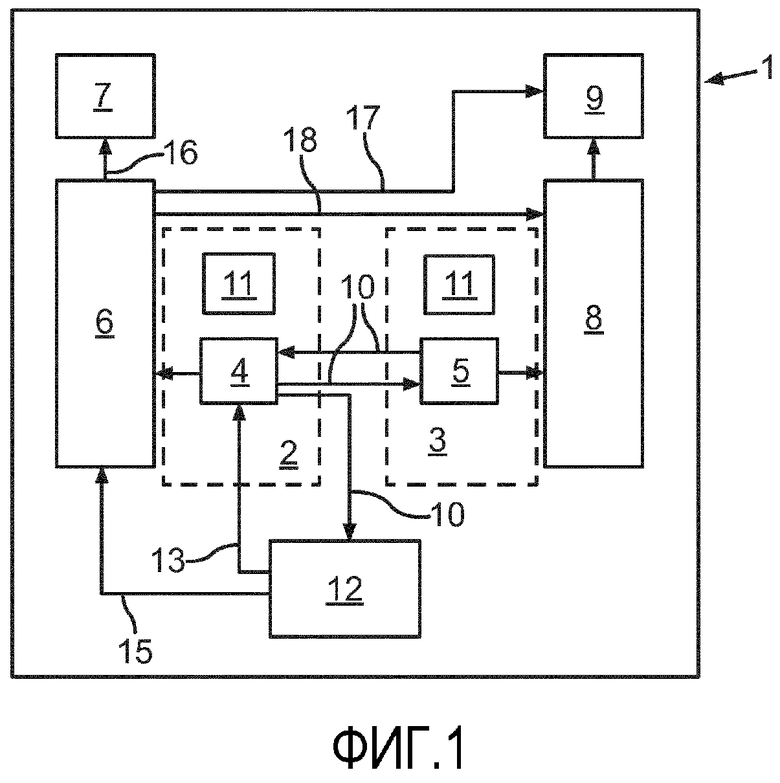
1. Тормозная система (1) для автомобиля, содержащая:
- первичную систему (2) и вторичную систему (3), каждая из которых предназначена для автоматического торможения автомобиля до остановки в соответствии с аварийной функцией, а затем для его блокировки в состоянии покоя;
- причем по меньшей мере первичная система (2) предназначена для выполнения аварийной функции при возникновении ошибки в функции (12) автомобиля, предназначенной для автономного управления или дистанционного управления автомобилем, причем вторичная система (3) в этом случае предназначена для того, чтобы выполнять аварийную функцию при возникновении ошибки в первичной системе (2),
причем первичная система (2) предназначена для выполнения аварийной функции также в случае ошибки вторичной системы (3), даже если не возникает никакой ошибки в функции (12) автомобиля.
2. Тормозная система (1) по п.1, отличающаяся тем, что аварийная функция при скорости автомобиля ниже предварительно заданной скорости предусматривает осуществление полного торможения и затем блокировку автомобиля в состоянии покоя.
3. Тормозная система (1) по п.2, отличающаяся тем, что аварийная функция при скорости автомобиля, превышающей или равной предварительно заданной скорости, предусматривает торможение автомобиля до остановки с учетом текущей дорожной ситуации и затем его блокировку в состоянии покоя.
4. Тормозная система (1) по п.3, отличающаяся тем, что первичная система (2) и вторичная система (3) предназначены для выполнения по меньшей мере одной подфункции функции (12) автомобиля в ходе выполнения аварийной функции.
5. Тормозная система (1) по одному из предыдущих пунктов, отличающаяся тем, что вторичная система (3) предназначена для выполнения аварийной функции даже в случае ошибки первичной системы (2), даже если не возникает никакой ошибки в функции (12) автомобиля.
6. Тормозная система (1) по одному из предыдущих пунктов, отличающаяся тем, что первичная система (2) предназначена для управления всеми средствами, предназначенными для торможения и/или блокировки автомобиля в состоянии покоя.
7. Тормозная система (1) по одному из предыдущих пунктов, отличающаяся тем, что вторичная система (3) предназначена для торможения автомобиля посредством приведения в действие электронного усилителя (8) тормозного усилия.
8. Тормозная система (1) по одному из предыдущих пунктов, отличающаяся тем, что вторичная система (3) предназначена для блокировки автомобиля в состоянии покоя посредством приведения в действие парковочного замка (9).
9. Тормозная система (1) по одному из предыдущих пунктов, отличающаяся тем, что первичная и/или вторичная система (2, 3) предназначена для выполнения аварийной функции при возникновении по меньшей мере одной из следующих ошибок функции (12) автомобиля:
- ошибка в коммуникации с функцией (12) автомобиля,
- превышение предельного значения скорости автомобиля, заданного функцией (12) автомобиля,
- запрашивание выполнения аварийной функции посредством функции (12) автомобиля.
10. Тормозная система (1) по одному из предыдущих пунктов, отличающаяся тем, что первичная и вторичная системы (2, 3) предназначены для выполнения аварийной функции при возникновении по меньшей мере одной из следующих ошибок в соответствующих системах:
- ошибка в коммуникации между первичной и вторичной системами (2, 3),
- дефект первичной системы (2),
- дефект вторичной системы (3).
11. Автомобиль с тормозной системой (1) по одному из предыдущих пунктов.
12. Способ работы тормозной системы (1) по одному из пп.1-10, при котором первичная система (2) выполняет аварийную функцию при возникновении ошибки в функции (12) автомобиля, предназначенной для автономного управления или дистанционного управления автомобилем, причем вторичная система (3) в этом случае вместо этого выполняет аварийную функцию, если в первичной системе (2) возникает ошибка.
| БЛОК УПРАВЛЕНИЯ ТОРМОЗНОЙ СИСТЕМОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2544252C2 |
| KR 20030042244 A, 28.05.2003 | |||
| DE 102014221007 A1, 21.04.2016. | |||

