Изобретение относится к области беспилотных колесных транспортных средств (далее ТС) - автомобилям, а именно к их тормозным системам.
При работе ТС может возникнуть ситуация отказа некоторых его систем: управления, связи и прочих. В случае пилотируемого ТС, в таких ситуациях на себя берет управление оператор с целью безопасной остановки ТС на дороге с помощью резервных подсистем. В беспилотном ТС такой возможности нет. В случае отказа системы обмена данными в беспилотном ТС, возникает ситуация, когда тормозная система не будет иметь возможность получить команду от системы управления ТС. Если по какой-либо причине пропадает питание бортовой сети на ТС, то система торможения управления ТС либо будет выключена, либо не будет иметь возможности дать команду на торможение. Отсутствие возможности экстренного торможения в случае отказа систем связи, питания и рабочей системы торможения беспилотного ТС напрямую влияет на безопасность использования таких ТС при любом уровне его автономности.
Из уровня техники известна регулируемая система экстренного торможения (DE 102016213675 А1, 01.02.2018). Изобретение относится к способу замедления транспортного средства в случае неисправности, в котором в случае обнаружения неисправности в гидравлической тормозной системе транспортного средства электронная тормозная система транспортного средства используется для замедления транспортного средства, и при этом соответствующие тормоза электронной тормозной системы, которые должны приводиться в действие электрическим способом, управляются как функция текущей скорости вращения соответствующего колеса, связанного с соответствующим тормозом, который должен приводиться в действие электрическим способом, для предотвращения блокировки соответствующего колеса.
К недостаткам представленной системы следует отнести то, что указанная система экстренного торможения применяется для управляемого водителем транспортного средства, необходимо бесперебойное питание электрического тормоза, необходима постоянная связь тормозной системы по внутренним шинам данных с управляющим блоком или педалями, а если питание и сигналов с датчиков нет, то эта система может развить чрезмерное тормозное усилие и создать аварийную ситуацию (занос). Таким образом соблюдается недостаточная безопасность при эксплуатации транспортных средств с электроприводом при экстренном торможении, а также в случаях выхода из строя системы питания или внутренней системы информационной связи ТС.
Из уровня техники известно устройство управления для использования в автомобиле, предназначенное для управления защитными мерами против отказа источника электропитания (RU 2529424 С2, 27.09.2014). Устройство управления содержит средство обнаружения отказа источника питания, средство проверки состояния хранения электроэнергии, средство парковочной блокировки для блокировки вращения колес с помощью механизма парковочной блокировки при условии, что скорость автомобиля позволяет блокировать вращение колеса с помощью механизма парковочной блокировки, когда состояние хранения электроэнергии источника питания парковочного блокиратора, определенное средством проверки состояния хранения электроэнергии, достигает нижнего предела состояния хранения электроэнергии, гарантирующего работу механизма парковочной блокировки.
К недостаткам представленной системы следует отнести то, что она применяется для управляемого водителем транспортного средства; торможение на любой скорости самостоятельно не проводится, только выводится предупреждение и ограничивается скорость ТС; торможение стояночным тормозом лишь на низких скоростях, когда нет опасности блокировки колес и неуправляемого заноса; стояночный тормоз не регулируется, просто включается и максимально быстро останавливает ТС; действует только при отсутствии заряда автономной батареи. Невозможно торможение при неисправности тормозной системы или отсутствии связи с системой управления ТС. Таким образом соблюдается недостаточная безопасность при эксплуатации транспортных средств с электроприводом при экстренном торможении.
Из уровня техники известно управление торможением (устройство и способ) (RU 2669505 С1, 11.10.2018). В указанном изобретении предложено устройство управления торможением для автоматического управления рабочим тормозом и стояночным тормозом транспортного средства. Устройство содержит блок прогнозирования скольжения, который прогнозирует вероятность того, что рассматриваемое транспортное средство будет скользить, и блок переключения тормозного устройства, который осуществляет переключение с рабочего тормоза на стояночный тормоз, когда рассматриваемое транспортное средство находится в состоянии удержания транспортного средства неподвижным с помощью рабочего тормоза. Блок переключения тормозного устройства задерживает момент времени, с которого начинается уменьшение тормозного усилия рабочего тормоза, если блок прогнозирования скольжения прогнозирует скольжение при переключении с рабочего тормоза на стояночный тормоз.
К недостаткам указанного изобретения следует отнести то, что система и способ применяются для управляемого водителем транспортного средства, (контроллер помощи при вождении активируется водителем); используется на неподвижном ТС. Таким образом соблюдается недостаточная безопасность при эксплуатации транспортных средств с электроприводом при экстренном торможении.
Наиболее близким аналогом (прототипом) предлагаемого изобретения является тормозная система для автомобиля и устройство педали тормоза для такой тормозной системы (DE 102008003379 А1, 09.07.2009). В заявке раскрыта тормозная система для транспортного средства, в частности коммерческого транспортного средства, имеющего устройство рабочего тормоза для обеспечения функции рабочего тормоза для торможения транспортного средства и устройство стояночного тормоза для обеспечения функции стояночного тормоза независимо от обслуживания тормозного устройства. Чтобы улучшить работу тормозной системы в случае отказа, транспортное средство автоматически тормозится при частичном или полном отказе одного из двух тормозных устройств с помощью другого тормозного устройства. Кроме того, изобретение относится к устройству педали тормоза для такой тормозной системы.
К недостаткам представленной системы следует отнести то, что указанная система применяется для управляемого водителем транспортного средства; невозможен контроль скорости ТС при выходе из строя бортовой сети электропитания или неполадках в шине CAN. Идет контроль только по датчикам; не учитываются важные факторы, влияющие на безопасность экстренного торможения, такие как коэффициент сцепления колес с дорожным покрытием, массы ТС, скорость движения ТС и уклона дороги.
Задача, решаемая изобретением, направлена на разработку системы экстренного торможения для беспилотных автомобилей с электроприводом, которая приведет к снижению аварийных ситуаций при эксплуатации таких автомобилей.
Технический результат заключается в снижение аварийных ситуаций при экстренном торможении беспилотных автомобилей с электроприводом.
Технический результат достигается тем, что система экстренного торможения беспилотных автомобилей с электроприводом, снабжена рабочей тормозной системой и стояночной тормозной системой, обеспечивающая экстренное торможение, выполняемое с учетом информации о текущем значении скорости, после частичного или полного отказа рабочей тормозной системы с помощью стояночной тормозной системы, снабженная также автономным электрическим питанием и имеющая возможность получения данных о текущем состоянии автомобиля и рабочей тормозной системы, причем стояночная тормозная система включает в себя стояночный тормоз с электромеханическим приводом, рабочая тормозная система включает в себя рабочий тормоз с электромеханическим приводом, а система экстренного торможения беспилотных автомобилей с электроприводом, содержащая блок управления тормозными системами, который связан с блоком управления беспилотного автомобиля, включается при отказе энергоустановки беспилотного автомобиля с электроприводом и при потери связи блока управления тормозными системами с блоком управления беспилотным автомобилем, осуществляя торможение с помощью рабочей тормозной системы или, в случае выхода ее из строя когда регистрируется отказ при анализе давления в ней при воздействии исполнительным механизмом рабочей тормозной системы, стояночной тормозной системы с использованием автономного источника питания, подающим питание на электропривода стояночного и рабочего тормозов в ответ на запрос блока управления беспилотного автомобиля о требуемом тормозном усилии для осуществления торможения, причем данные о текущем состоянии беспилотного автомобиля и рабочего тормоза поступают в блок управления беспилотного автомобиля для последующей передачи этих данных в блок управления тормозными системами, который также получает значение коэффициента сцепления колес с дорогой, переданной от блока управления беспилотного автомобиля и вычисленной там на основании данных о типе дорожного покрытия и погодных условий для формирования в блоке управления тормозными системами стратегии торможения, представляющей собой изменение тормозного усилия, формируемого рабочей или стояночной тормозной системой, по времени от момента начала торможения до полной остановки беспилотного автомобиля, причем в формировании стратегии торможения стояночным тормозом учитывается масса автомобиля, вычисляемая системой управления беспилотного автомобиля на основании данных об ускорении и затрачиваемой электрической мощности, и уклон дороги, фиксируемый системой управления беспилотным автомобилем по картографическим данным и датчику уклона беспилотного автомобиля.
Система экстренного торможения для беспилотных автомобилей с электроприводом имеет следующие дополнительные отличия:
- данные от блока управления беспилотного автомобиля в блок управления тормозными системами передаются посредством шины обмена данных беспилотного транспортного средства для последующего расчета профиля торможения рабочего или стояночного тормозов;
- данные о типе дорожного покрытия и погодных условий поступают от онлайн-сервисов с картографическими и погодными данными в блок управления беспилотным транспортным средством для расчета коэффициента сцепления и передачи его в систему экстренного торможения, что используется для корректировки профилей торможения;
- система экстренного торможения для беспилотных автомобилей с электроприводом содержит профиль торможения во времени, который является зависимостью тормозного усилия от времени, по которой осуществляется экстренное торможение после потери связи, с возможностью корректировки в зависимости от коэффициента сцепления шин с дорожным полотном, массы, уклона и скорости движения автомобиля в момент потери связи для обеспечения плавного торможения до полной остановки в условиях потери системой торможения информации о текущей скорости движения автомобиля;
- система экстренного торможения для беспилотных автомобилей с электроприводом содержит отдельный профиль торможения, который является зависимостью тормозного усилия от времени, для стояночного тормоза отличный от рабочего тормоза, учитывающий коэффициенты сцепления, уклон, массу и скорость движения автомобиля, в случае доступности этих данных в реальном времени в режиме экстренного торможения или с учетом последних полученных данных на момент перед экстренным торможением для учета особенностей работы стояночного тормоза при экстренном торможении автомобиля.
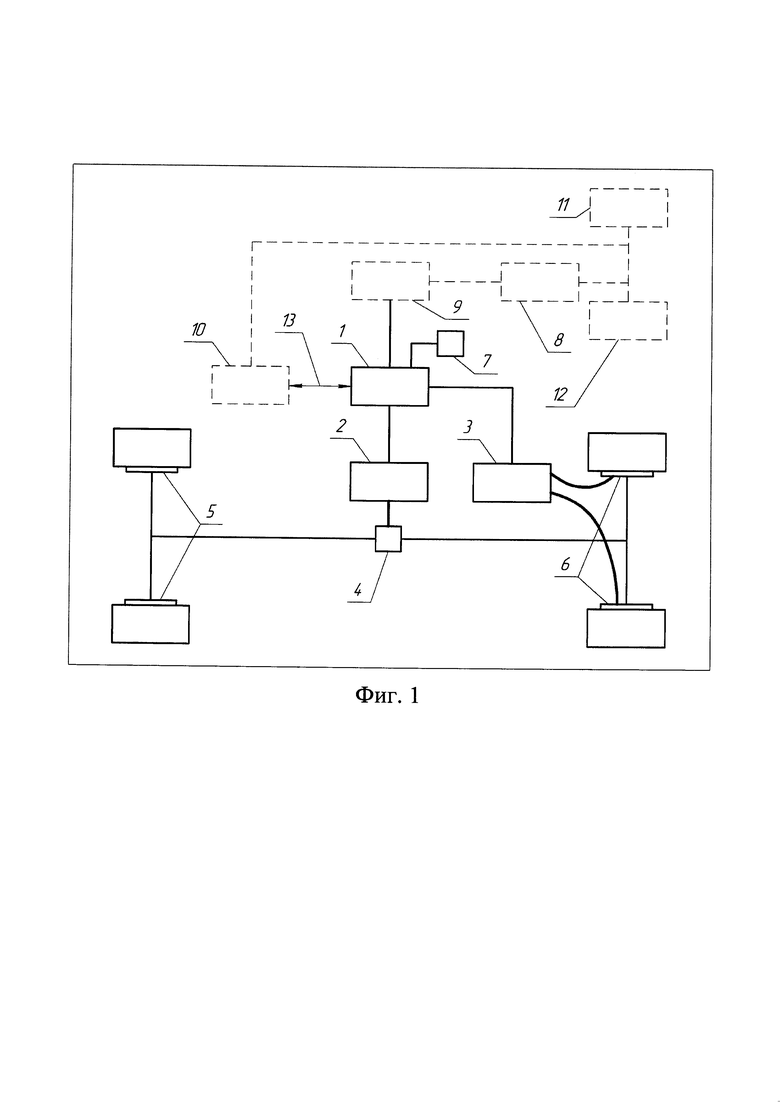
Изобретение иллюстрируется чертежами, на котором представлена схема системы экстренного торможения для беспилотных автомобилей с электроприводом (фиг. 1), алгоритм системы экстренного торможения для беспилотных автомобилей с электроприводом (фиг. 2).
Система экстренного торможения для беспилотных автомобилей с электроприводом состоит из блока управления тормозными системами 1, стояночной тормозной системы (на чертеже не показана), рабочей тормозной системы (на чертеже не показана). Стояночная тормозная система включает в себя стояночный тормоз с электромеханическим приводом 2. Рабочая тормозная система включает в себя рабочий тормоз с электромеханическим приводом 3. Рабочий тормоз выполнен двухконтурным, для независимой работы осей.
Электропривод рабочего тормоза 3 механически соединен с главным тормозным цилиндром 4, который в свою очередь гидравлически соединен с рабочими тормозными цилиндрами передних 5 и задних 6 колес. Электропривод стояночного тормоза 2 механически соединен с рабочими тормозными цилиндрами задних колес 6.
Блок управления тормозными системами 1 имеет автономный источник питания 7 и соединен с электроприводами рабочего тормоза 3 и стояночного тормоза 2. Питание блока управления тормозными системами 1 осуществляется через преобразователь постоянного тока 8 и низковольтную батарею 9.
Блок управления беспилотного автомобиля 10 соединен шиной постоянного тока с высоковольтной батареей 11 и электроприводом 12 транспортного средства. Блок управления беспилотного автомобиля 10 получает данные о движении по маршруту следования, текущих погодных условиях, уклоне дорожного полотна (датчик уклона, акселерометр и пр.), ускорении и прикладываемом моменте беспилотного автомобиля. Блок 11 рассчитывает параметры беспилотного автомобиля и корректирует их в реальном времени, а именно: массу беспилотного автомобиля по ускорению и приложенному моменту с учетом текущего уклона, коэффициент сцепления с дорожным полотном по информации о текущих погодных условиях и типе дорожного покрытия, текущую скорость движения беспилотного автомобиля. Первичный расчет массы беспилотного автомобиля осуществляется при наборе скорости после каждой остановки. Далее в процессе движения значение массы корректируется при каждом ускорении, если в расчетах появляется расхождение.
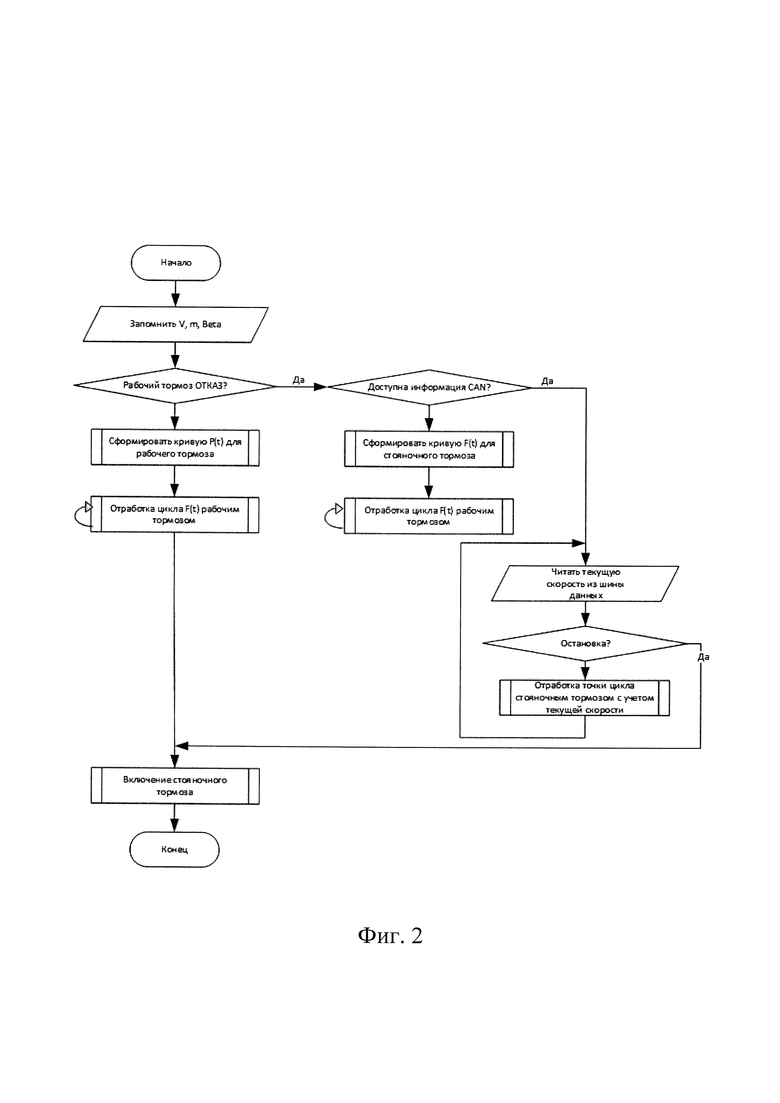
Алгоритм системы экстренного торможения для беспилотных автомобилей с электроприводом можно расписать следующим образом.
1. По событию экстренного торможения блок управления тормозными системами переходит в режим экстренного торможения.
2. Запоминается последние полученные значения скорости автомобиля, его массы, уклона дорожного полотна.
3. Если рабочая тормозная система в режиме «Отказ», то следующий пункт 6.
4. С учетом сохраненной в п. 2 информации, формируется кривая торможения по времени для рабочего тормоза.
5. По кривой торможения рабочая тормозная система отрабатывает заданные значения тормозного усилия. По окончании торможения переход к п. 12.
6. Если связь по шине данных доступна беспилотного автомобиля доступна, то переходим к п. 9.
7. С учетом сохраненной в п. 2 информации, формируется кривая торможения по времени для стояночного тормоза.
8. По кривой торможения стояночная тормозная система отрабатывает заданные значения тормозного усилия. По окончании торможения переход к п. 12.
9. Считывается текущее значение скорости беспилотного автомобиля.
10. Если скорость равна нулю, то переход к п. 12.
11. Установка тормозного усилия стояночным тормозом с учетом текущей скорости движения беспилотного автомобиля. Переход к п. 9.
12. Включается стояночный тормоз на полную блокировку.
13. Система торможения выходит из режима экстренного торможения и выключается.
Таким образом, данная система экстренного торможения может безопасно остановить беспилотный автомобиль в случае отказа основных систем беспилотного автомобиля, шины обмена данными беспилотного автомобиля, потери бортового питания ТС, а также отказа рабочей тормозной системы. Учет данных о работе и параметрах беспилотного автомобиля в начале экстренного торможения позволяет рассчитать траекторию безопасного торможения беспилотного автомобиля.
При штатной работе беспилотного автомобиля с электроприводом торможение осуществляется с помощью рабочей тормозной системы следующим образом.
Блок управления беспилотного автомобиля 10 формирует управляющий сигнал, характеризующий требуемое тормозное усилие, передает его посредством шины обмена данных CAN в блок управления тормозными системами 1, на электропривод рабочего тормоза 3 подается электрическое питание, он механически воздействует на главный тормозной цилиндр 4, создавая давление в гидравлических контурах, рабочая жидкость под давлением приводит рабочие тормозные цилиндры 4 и осуществляет торможение беспилотного автомобиля.
При штатной работе беспилотного автомобиля с электроприводом его фиксация в неподвижном состоянии осуществляется с помощью стояночной тормозной системы следующим образом:
блок управления беспилотного автомобиля 10 формирует управляющий сигнал на включение стояночного тормоза, передает его посредством шины обмена данными CAN в блок управления тормозными системами 1, на электропривод стояночного тормоза 2 подается электрическое питание, он механически воздействует на рабочие тормозные цилиндры задних колес 6 и осуществляет их блокировку.
Во время функционирования рабочей тормозной системы постоянно анализируется ее работа с целью выявления отказа. Если при запросе на торможение и воздействии электропривода рабочей тормозной системы не происходит ожидаемого увеличения давления тормозной жидкости, то диагностируется отказ рабочей тормозной системы.
При отказе рабочей тормозной системы блок управления тормозными системами 1 в ответ на запрос блока управления беспилотного автомобиля 10 о требуемом тормозном усилии, подает питание на электропривод стояночного тормоза 2, который осуществляет торможение беспилотным автомобилем.
При отказе рабочей тормозной системы блок управления тормозными системами 1 включает режим экстренного торможения с помощью стояночного тормоза. Отказ рабочей тормозной системы осуществляется при анализе давления в ней при воздействии исполнительным механизмом рабочей тормозной системы.
В случае потери связи блока управления тормозными системами 1 с блоком управления беспилотного автомобиля или обрыва питания активируется система экстренного торможения, осуществляющая торможение с помощью рабочей тормозной системы или, в случае выхода ее из строя, стояночной тормозной системы с использованием автономного источника питания 7.
Для исключения аварийной ситуации из-за блокировки колес транспортного средства при экстренном торможении блоком управления тормозными системами 1 формируется стратегия торможения, а именно изменение тормозного усилия, формируемого рабочей или стояночной тормозной системой, по времени от момента начала торможения до полной остановки беспилотным автомобилем с учетом полученных данных от блока управления беспилотного автомобиля 10 о массе транспортного средства, скорости движения, уклоне дороги и коэффициенте сцепления колес с дорожным покрытием. Коэффициент сцепления колес с дорожным покрытием рассчитывается блоком управления беспилотного автомобиля 10 на основании данных о типе дорожного покрытия и погодных условиях. Остановка осуществляется независимо от того, есть связь с системой управления беспилотным автомобилем или нет.
В случае работоспособности рабочей тормозной системы применяется профиль торможения во времени, который является зависимостью тормозного усилия от времени, по которой осуществляется экстренное торможение после потери связи, с возможностью корректировки в зависимости от коэффициента сцепления шин с дорожным полотном, массы, уклона и скорости движения автомобиля в момент потери связи, а отдельный профиль торможения, как кривая усилия от времени, для стояночного тормоза отличный от рабочего тормоза, учитывающий коэффициенты сцепления, уклон, массу и скорость движения автомобиля, в случае доступности этих данных в реальном времени в режиме экстренного торможения или с учетом последних полученных данных на момент перед экстренным торможением.
Таким образом, достигается снижение аварийных ситуаций при экстренном торможении беспилотных автомобилей с электроприводом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления энергоустановкой беспилотного гибридного автомобиля | 2019 |
|
RU2733599C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ | 2022 |
|
RU2793009C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ И СПОСОБ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ | 2015 |
|
RU2669505C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ, ДВИЖУЩИХСЯ ДРУГ ЗА ДРУГОМ ПО ОДНОЙ ПОЛОСЕ | 2023 |
|
RU2822940C1 |
| УСТРОЙСТВО ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С РАКЕТНЫМ ДВИГАТЕЛЕМ | 2019 |
|
RU2715507C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| ТОРМОЗНАЯ СИСТЕМА ДЛЯ АВТОМОБИЛЯ И СПОСОБ РАБОТЫ ТОРМОЗНОЙ СИСТЕМЫ | 2018 |
|
RU2741448C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2021 |
|
RU2778064C1 |
Предложена система экстренного торможения беспилотных автомобилей. Система экстренного торможения содержит рабочую тормозную систему и стояночную тормозную систему. Включают систему экстренного торможения при отказе энергоустановки, при потере связи блока управления тормозными системами с блоком управления беспилотным автомобилем. Осуществляют торможение с помощью рабочей тормозной системы, в случае выхода ее из строя - стояночной тормозной системой с использованием автономного источника питания. Данные о текущем состоянии беспилотного автомобиля и рабочего тормоза поступают в блок управления беспилотного автомобиля для последующей передачи этих данных в блок управления тормозными системами. Блок управления тормозными системами получает значение коэффициента сцепления колес с дорогой из блока управления. Стратегию торможения также передают в блок управления тормозными системами. Стратегию торможения вычисляют на основе данных о типе дорожного покрытия и погодных условиях. Стратегией торможения является изменение тормозного усилия, формируемого рабочей или стояночной тормозной системой, по времени от момента начала торможения до полной остановки беспилотного автомобиля. При формировании стратегии торможения стояночным тормозом учитывают массу автомобиля, уклон дороги. Массу вычисляют на основании ускорения и электрической мощности. Уклон дороги фиксируют по картографическим данным и датчику уклона автомобиля. Достигается повышение безопасности. 4 з.п. ф-лы, 2 ил.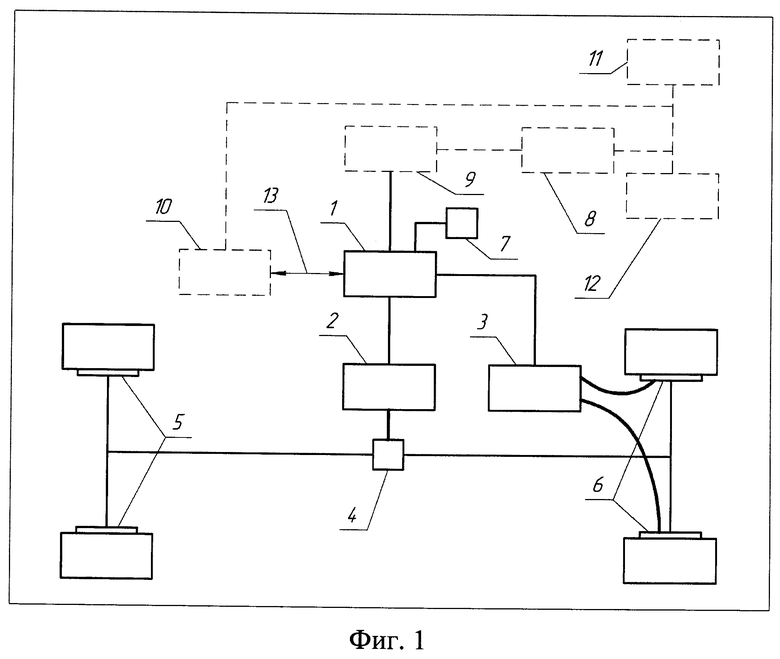
1. Система экстренного торможения беспилотных автомобилей с электроприводом, снабженная рабочей тормозной системой и стояночной тормозной системой, обеспечивающая экстренное торможение, выполняемое с учетом информации о текущем значении скорости, после частичного или полного отказа рабочей тормозной системы с помощью стояночной тормозной системы, снабженная также автономным электрическим питанием и имеющая возможность получения данных о текущем состоянии автомобиля и рабочей тормозной системы, отличающаяся тем, что стояночная тормозная система включает в себя стояночный тормоз с электромеханическим приводом, рабочая тормозная система включает в себя рабочий тормоз с электромеханическим приводом, а система экстренного торможения беспилотных автомобилей с электроприводом, содержащая блок управления тормозными системами, который связан с блоком управления беспилотного автомобиля, включается при отказе энергоустановки беспилотного автомобиля с электроприводом и при потере связи блока управления тормозными системами с блоком управления беспилотным автомобилем, осуществляя торможение с помощью рабочей тормозной системы или, в случае выхода ее из строя, когда регистрируется отказ при анализе давления в ней при воздействии исполнительным механизмом рабочей тормозной системы, стояночной тормозной системы с использованием автономного источника питания, подающим питание на электропривод стояночного и рабочего тормозов в ответ на запрос блока управления беспилотного автомобиля о требуемом тормозном усилии для осуществления торможения, причем данные о текущем состоянии беспилотного автомобиля и рабочего тормоза поступают в блок управления беспилотного автомобиля для последующей передачи этих данных в блок управления тормозными системами, который также получает значение коэффициента сцепления колес с дорогой, переданной от блока управления беспилотного автомобиля и вычисленной там на основании данных о типе дорожного покрытия и погодных условий для формирования в блоке управления тормозными системами стратегии торможения, представляющей собой изменение тормозного усилия, формируемого рабочей или стояночной тормозной системой, по времени от момента начала торможения до полной остановки беспилотного автомобиля, причем в формировании стратегии торможения стояночным тормозом учитывается масса автомобиля, вычисляемая системой управления беспилотного автомобиля на основании данных об ускорении и затрачиваемой электрической мощности, и уклон дороги, фиксируемый системой управления беспилотным автомобилем по картографическим данным и датчику уклона беспилотного автомобиля.
2. Система экстренного торможения беспилотных автомобилей с электроприводом по п. 1, отличающаяся тем, что данные от блока управления беспилотного автомобиля в блок управления тормозными системами передаются посредством шины обмена данных CAN.
3. Система экстренного торможения беспилотных автомобилей с электроприводом по п. 1, отличающаяся тем, что данные о типе дорожного покрытия и погодных условий поступают в блок управления беспилотным автомобилем от онлайн-сервисов с картографическими и погодными данными.
4. Система экстренного торможения беспилотных автомобилей с электроприводом по п. 1, отличающаяся тем, что содержит профиль торможения во времени, который является зависимостью тормозного усилия от времени; по которому осуществляется экстренное торможение после потери связи, с возможностью его корректировки в зависимости от коэффициента сцепления шин с дорожным полотном, массы, уклона и скорости движения автомобиля в момент потери связи.
5. Система экстренного торможения беспилотных автомобилей с электроприводом по п. 1, отличающаяся тем, что содержит отдельный профиль торможения, который является зависимостью тормозного усилия от времени, для стояночного тормоза, отличный от рабочего тормоза, учитывающий коэффициенты сцепления, уклон, массу и скорость движения автомобиля, в случае доступности этих данных в реальном времени в режиме экстренного торможения или с учетом последних полученных данных на момент перед экстренным торможением.
| US 5302008 A, 12.04.1994 | |||
| KR 100883013 B1, 12.02.2009 | |||
| US 2006232124 A1, 19.10.2006. |

