Изобретение относится к блоку управления тормозной системой транспортного средства. В известных тормозных системах блок управления расположен в центральном модуле вблизи узла тормозной педали внутри транспортного средства в кабине, в которой расположено также по меньшей мере одно сиденье водителя.
Из кабины от центрального модуля к различным компонентам тормозной системы, в частности к модулю задней оси и, при необходимости, к модулю передней оси, ведут многочисленные электрические провода, причем модули содержат клапанные устройства для модуляции пневматического давления с целью пневматического приведения в действие тормозных цилиндров. Эти модули закреплены на несущей конструкции транспортного средства. Эта несущая конструкция образована в случае грузовых автомобилей обычно лестничной рамой. По сравнению с этим автобусы часто содержат в качестве несущей конструкции несущий кузов. Из-за большого числа электрических проводов от центрального модуля и к нему из кабины к несущей конструкции ведут толстые кабельные жгуты. Прокладка таких кабельных жгутов является сложной и трудоемкой, в частности, поскольку между кабиной и несущей конструкцией, как правило, возникают относительные движения, будь то из-за движений кабины относительно несущей конструкции или из-за опрокидываемости кабины относительно нее. Последнее предусмотрено обычно у безрельсовых транспортных средств, в частности у грузовых автомобилей, для доступа к расположенному под кабиной моторному отсеку. Однако гибкая прокладка толстых кабельных жгутов без нарушения их надежности технически сложна и потому дорога.
В основе изобретения лежит задача усовершенствования таких известных тормозных систем. В частности, прокладка проводов должна быть упрощена, прокладка и надежность кабельных жгутов должны быть улучшены, а затраты на разработку, подверженность к сбоям во время работы и, тем самым, также затраты во время работы - снижены.
Эта задача решается, согласно изобретению, посредством блока управления по п.1 формулы. Он выполнен так, что может располагаться вне кабины на несущей конструкции транспортного средства. За счет этого значительно уменьшается число электрических проводов, ведущих из кабины к устройствам на несущей конструкции. Также за счет этого кабельные жгуты между кабиной и несущей конструкцией могут быть выполнены существенно более тонкими и, тем самым, более гибкими, что улучшает их подвижность.
Кроме того, уменьшение числа ведущих из кабины к несущей конструкции (и обратно) электрических проводов упрощает герметизацию кабины в зоне соответствующего ввода кабельных жгутов в кабину или из кабины. Следовательно, можно устранить или значительно уменьшить проблемы герметизации из-за толстых кабельных жгутов.
Также в самой кабине число электрических проводов уменьшается. Это сокращает расходы на материалы, обслуживание и ремонт. Кроме того, более короткие пути проводов уменьшают подверженность тормозной системы к сбоям, повышают безотказность, а за счет этого также безопасность тормозной системы. В частности, у грузовых автомобилей с опрокидываемой вперед кабиной расположение блока управления на несущей конструкции способствует тому, что число электрических проводов или линий передачи данных, которые за счет движения опрокидывания кабины относительно несущей конструкции приходится сгибать, уменьшается по сравнению с уровнем техники. Кроме того, экономится место в кабине, в частности в зоне передней полки, панели приборов, соответственно, перчаточного ящика или узла тормозной педали, где обычно расположен блок управления в соответствии с уровнем техники.
Согласно изобретению, было обнаружено, что расположение блока управления на несущей конструкции, несмотря на более высокие затраты, необходимые для его защиты от влаги и частиц грязи (например, повышенные требования к корпусу, герметизации кабелей), из-за большого числа электрических проводов, которые больше не приходится вести в кабину, является предпочтительным и улучшает известные тормозные системы.
Блок управления обладает также дополнительной функциональностью для управления электронной системой пневмоподвески. Под этим следует понимать то, что блок управления управляет элементами электронной системы пневмоподвески, например электромагнитным клапаном для наполнения и опорожнения пневматической рессоры. Это значит, что управляющая электроника системы пневмоподвески интегрирована в блок управления тормозной системой. Они содержат общий корпус. За счет интеграции сокращаются расходы, поскольку экономится один корпус, а затраты на кабельную разводку сокращаются. В частности, отпадают кабели для энергопитания и для соединения с CAN-шиной. Кроме того, благодаря изобретению уменьшается конструктивное пространство, поскольку один общий блок управления для тормозной системы и системы пневмоподвески требует меньше конструктивного пространства, чем два отдельных блока управления. За счет этого, как и за счет сокращения затрат на кабельную разводку, сокращаются также затраты на сборку транспортного средства.
Предпочтительные варианты осуществления изобретения описаны ниже.
Блок управления находится в корпусе, который образует защиту от воды и частиц грязи. В одном особом варианте корпус выполнен из двух частей: внутреннего и внешнего корпусов. В зоне крышек или отверстий корпуса герметизированы уплотнениями. Кабельные соединения ведут через отверстия во внутреннем корпусе к штекерным гнездам в или на внешнем корпусе. Соединения от блока управления и к нему создаются за счет вставки штекеров в эти гнезда.
Предпочтительно блок управления обладает по меньшей мере одной дополнительной к его функциональности, в частности к функциональности рабочего тормоза, функциональностью для управления, в частности, модулятором стояночного тормоза для осуществления функции стояночного тормоза, антиблокировочной системой для осуществления антиблокировочной функции, модулем регулирования динамики движения для регулирования динамики движения или динамической устойчивости движения, и/или управляемой электронным путем воздухоподготовкой. Особенно предпочтительно блок управления встроен в модуль, соответственно, модулятор задней оси, являющийся, при необходимости, одновременно модулятором стояночного тормоза для модуляции пневматического давления для функции стояночного тормоза для торможения транспортного средства. Кроме того, возможна также интеграция блока управления в модулятор передней оси, модуль регулирования динамики движения, соответственно, ESC-модуль (Electronic Stability Control - электронная система курсовой устойчивости) или электронный модуль воздухоподготовки (EAPU - Electronic Air Processing Unit). За счет интеграции в существующие модули сокращаются расходы, в частности, поскольку за счет этого уменьшается число электронных управляющих устройств, электрических проводов и число герметизированных, защищающих от грязи и влаги корпусов.
Согласно одному предпочтительному варианту осуществления изобретения, в блок управления встроен по меньшей мере один сенсор для определения режима движения. Под режимом движения следует понимать, в частности, положительные и отрицательные ускорения транспортного средства, особенно также поперечные ускорения. Сенсор может быть, например, сенсором ускорения, сенсором скорости рыскания и/или сенсором наклона и служит для регистрации режима движения, который требует автоматического тормозного вмешательства, например, за счет регулирования динамики движения. Интеграция блока управления экономит расходы.
Согласно одному предпочтительному варианту осуществления изобретения, блок управления обладает дополнительной функциональностью для вспомогательных для водителя систем, причем она может выполнять функции поддержания продольной устойчивости (LDW), адаптивного регулирования скорости (ACC), контроля мертвого угла (BSD) и/или автономной аварийной тормозной системы (AEBS).
Согласно другому предпочтительному варианту осуществления изобретения, блок управления обладает дополнительной функциональностью для управления системой контроля давления в шинах.
Предпочтительным образом ABS-провода, ведущие от блока управления к сенсорам частоты вращения колес, используются в качестве антенн для приема сигналов модулей контроля давления в шинах, которые определяют его и установлены в или на колесах или клапанах шин. Благодаря этому отпадают отдельные антенны, поскольку ABS-провода используются в качестве антенн.
Можно также использовать ABS-провода в качестве электрических подводящих проводов к размещенным в колесных нишах антеннам для приема сигналов модулей контроля давления в шинах. При таком выполнении отпадают подводящие провода к антеннам.
В другом предпочтительном варианте осуществления изобретения предусмотрено, что с помощью передаваемых по ABS-проводам сигналов модулей контроля давления в шинах осуществляется соотнесение этих модулей с колесными нишами или колесами. В этом варианте используется тот эффект, что самый сильный сигнал ожидается на ABS-проводе, который ведет к соответствующей колесной шине. Следовательно, соотнесение осуществляется с помощью силы сигнала.
Другие предпочтительные варианты следуют из зависимых пунктов формулы и примеров осуществления изобретения, более подробно поясненных с помощью чертежей, на которых:
фиг.1 - схема тормозной системы в соответствии с первым примером выполнения;
фиг.2 - схема тормозной системы в соответствии со вторым примером выполнения;
фиг.3 - схема тормозной системы в соответствии с третьим примером выполнения;
фиг.4 - схема тормозной системы в соответствии с четвертым примером выполнения;
фиг.5 - схема тормозной системы в соответствии с пятым примером выполнения;
фиг.6 - схема тормозной системы в соответствии с шестым примером выполнения;
фиг.7 - схема тормозной системы в соответствии с седьмым примером выполнения;
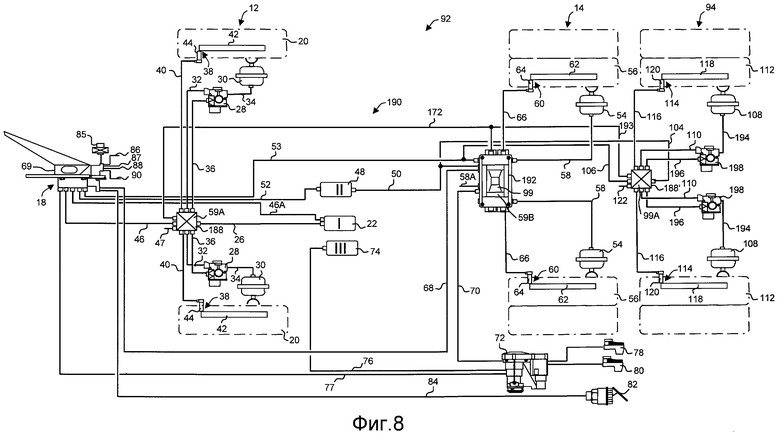
фиг.8 - схема тормозной системы в соответствии с восьмым примером выполнения;
фиг.9 - схема тормозной системы в соответствии с девятым примером выполнения;
фиг.10 - схема тормозной системы в соответствии с десятым примером выполнения;
фиг.11 - схема тормозной системы в соответствии с одиннадцатым примером выполнения;
фиг.12 - в упрощенном виде расположение тормозной системы в транспортном средстве, выполненном в виде грузового автомобиля;
фиг.13 - в упрощенном виде расположение тормозной системы в транспортном средстве, выполненном в виде автобуса.
На фиг.1 схематично изображено двухосное транспортное средство 10 с передней 12 и задней 14 осями и тормозной системой 16. Последняя содержит блок управления, посредством которого электронным путем вычисляется тормозная сила и в зависимости от вычисленной тормозной силы может формироваться сигнал тормозной силы. Кроме того, тормозная система 16 содержит три тормозных контура рабочего тормоза, приводимого в действие узлом 18 тормозной педали. Однако изобретение не ограничено двухосными транспортными средствами и может применяться, в частности, также в транспортных средствах более чем с двумя осями, в частности с несколькими задними и/или несколькими передними осями. Под транспортным средством следует понимать, в том числе, также тягач или транспортное средство без тяговой функции, например, автобус.
Транспортное средство содержит несущую конструкцию и кабину с сиденьем водителя. Помимо сиденья водителя кабина может содержать дополнительные сиденья, например сиденье для пассажира рядом с водителем, или в случае автобуса - большое число пассажирских сидений. Несущая конструкция грузового автомобиля может быть образована лестничной рамой. Автобусы содержат в качестве несущей конструкции преимущественно несущий кузов, однако могут содержать также раму для размещения кабины.
Узел 18 тормозной педали расположен в кабине вблизи сиденья водителя, так что он может управлять ею своей ногой. Согласно изобретению, блок управления расположен вне кабины на несущей конструкции, в частности на лестничной раме. Таким образом, блок управления находится не в предусмотренном для водителя и, при известных условиях, для пассажиров внутреннем пространстве транспортного средства 10. Блок управления может быть закреплен на несущей конструкции, например, привинчен к ней, или расположен на ней непосредственно или косвенно вне кабины иным образом. Кроме того, блок управления обладает дополнительной функциональностью для управления электронной системой пневмоподвески.
На фиг.1 изображено также управляющее устройство 17, содержащее первый модуль 19, причем он является модулем задней оси. Блок управления интегрирован в управляющее устройство 17, соответственно, в модуль 19.
Пример на фиг.1 изображает пневматическую (работающую на сжатом воздухе) тормозную систему 16 с тремя рабочими тормозными контурами. Первый из них служит для затормаживания колес 20 передней оси 12. Этот первый контур содержит пневморесивер 22, связанный посредством пневмопровода 26 со вторым модулем 24. Последний является в этом примере модулем передней оси. Кроме того, первый контур содержит для каждого из колес 20 клапанный блок 28, через который сжатый воздух может подаваться к тормозным цилиндрам 30 тормозов на колесах 20 и отводиться от них. Следовательно, клапанные блоки 28 посредством пневмопроводов 32 связаны с модулем 24 передней оси, а посредством пневмопроводов 34 - с тормозными цилиндрами 30. Модуль 24 содержит один или несколько электромагнитных клапанов, посредством которых сжатый воздух подается в пневмопроводы 32 и удаляется из них и посредством которых, при необходимости, в пневмопроводах 32 может поддерживаться пневматическое давление.
Клапанные блоки 28 связаны электрическими проводами 36 с модулем 19 для получения от него управляющих сигналов с целью приведения в действие клапанных блоков 28. Предпочтительным образом оба клапанных блока 28 могут быть также интегрированы в модуль 24.
На колесах 20 предусмотрены сенсорные средства 38 скорости колеса, связанные электрическими проводами 40 с модулем 19. Сенсорные средства 38 служат для определения скорости вращения соответствующего колеса. Каждое сенсорное средство 38 состоит из жестко соединенного с соответствующим колесом 20 индуктора 42, который электромагнитным путем связан с активно или пассивно работающим колесным сенсором 44. С помощью сенсорных средств 38 можно констатировать, например, блокирование или пробуксовывание колес 20, а посредством соответствующих управляющих сигналов от модуля 19 к клапанным блокам 28 можно подстраивать тормозное давление к тормозным цилиндрам 30, в частности уменьшить его в случае склонности колеса 20 к блокированию. Таким образом, выполняется антиблокировочная функция для колес 20.
Модуль 24 связан пневмопроводом 46 с узлом 18 тормозной педали. Пневмопровод 46 направляет управляемое пневматическим путем давление в качестве резервного давления от узла 18 тормозной педали к модулю 24. Сжатый воздух подается к узлу 18 тормозной педали по пневмопроводу 46А из пневморесивера 22. Наконец, модуль 24 может иметь присоединение 47 для электропитания.
Второй тормозной контур содержит второй пневморесивер 48, который пневматически связан посредством пневмопровода 50 с модулем 19, а посредством пневмопровода 52 - с узлом 18 тормозной педали. Управляемое узлом 18 тормозной педали давление при отказе электроники попадает по пневмопроводу 53 в качестве резервного давления к модулю 19. Второй тормозной контур содержит далее тормозные цилиндры 54, причем каждый из них относится к одному колесу 56 задней оси 14. Тормозные цилиндры 54 связаны пневмопроводами 58 с модулем 19. Внутри модуля 19 расположены один или несколько клапанов для измерения тормозного давления для тормозных цилиндров 54. Клапан или клапаны представляют собой один или несколько электромагнитных клапанов, посредством которых сжатый воздух может подаваться в пневмопроводы 58 и удаляться их них и посредством которых в них, при необходимости, может поддерживаться пневматическое давление.
Модуль 19 задней оси имеет вывод 58А для электропитания. Модуль 19 связан электрическим проводом 59 с модулем 24. По этому проводу 59 модуль 19 посылает управляющие сигналы на модуль 24 для управления одним или несколькими клапанами с целью измерения тормозного давления в тормозных цилиндрах 30. Таким образом, модуль 19 содержит помимо управляющего устройства 17 также управляющий электронный или управляющий логический блок 59А для измерения тормозного давления для тормозов на передней оси 12 и управляющий логический блок 59В для измерения тормозного давления на задней оси 14. Управляющие логические блоки 59А, 59В управляются управляющими сигналами тормозной силы от управляющего устройства и содержат силовые электронные компоненты для вырабатывания электрической мощности для приведения в действие тормозных компонентов, таких как электромагнитные клапаны или электромеханические исполнительные органы.
На колесах 56 задней оси 14 также предусмотрены сенсорные средства 60 скорости колеса, обеспечивающие определение скорости вращения соответствующего колеса. Каждое сенсорное средство 60 также состоит из жестко соединенного с колесом 56 индуктора 62, который электромагнитным путем связан с активно или пассивно (индуктивно) работающим колесным сенсором 44. Сенсорные средства 60, в частности колесные сенсоры 44, связаны электрическими проводами 66 с модулем 19. С помощью сенсорных средств 60 можно констатировать блокирование или пробуксовывание колес 56 задней оси 14 и соответственно варьировать измерение тормозного давления к тормозным цилиндрам 64, чтобы противодействовать склонности колес 56 к блокированию их или повышенному пробуксовыванию.
Модуль 19 связан электрическим проводом 68 с узлом 18 тормозной педали и принимает по этому проводу электрический сигнал запрашивания торможения от датчика 69 тормозных значений узла 18 тормозной педали. С учетом электрического сигнала запрашивания торможения модуль 19, как и модуль 24, измеряет подаваемое к тормозным цилиндрам 54, 30 тормозное давление.
Модуль 19 связан также электрическим проводом 70 с управляющим клапаном 72 прицепа третьего тормозного контура. Этот третий тормозной контур содержит третий пневморесивер 74, связанный пневмопроводом 76 с управляющим клапаном 72 прицепа. Управляющий клапан 72 служит для управления тормозным давлением присоединяемого прицепа (не показан). Управляющий клапан 72 отдает полученный из пневморесивера 74 сжатый воздух в зависимости от электрических управляющих сигналов или пневматического давления, в частности электрических управляющих сигналов, полученных по проводу 70 от модуля 19, или подаваемого по пневмопроводу 77 от узла 18 тормозной педали пневматического давления через пневмоприсоединения 78, 80 на тормозную систему присоединяемого прицепа. Таким образом, управляющий клапан 72 косвенно получает через модуль 19 электрический сигнал, например ШИМ-сигнал (ШИМ - широко-импульсная модуляция), представляющий желание водителя к торможению и управляемый непосредственно узлом 18 тормозной педали пневматическое резервное давление.
Далее предусмотрен электрический штекерный разъем 82 для электропитания и передачи данных к прицепу и от него. Разъем 82 электрическим проводом 84 связан с узлом 18 тормозной педали, а в качестве альтернативы он может быть также подключен к модулю 19 на раме.
Узел 18 тормозной педали связан с сенсором 85 сигнала торможения накатом, посредством которого можно активировать и дезактивировать функцию торможения накатом. Эта функция рассчитана, например, таким образом, что после ее активирования при движущемся транспортном средстве происходит контроль того, не остановилось ли оно. При обнаружении состояния остановки вследствие приведения в действие водителем тормоза автоматически за счет срабатывания клапанных блоков 28 и предусмотренных в модуле 19 клапанов имеющиеся или заданные тормозные давления в тормозных цилиндрах 30, 54 и в тормозной системе прицепа поддерживаются на текущем или заданном уровне без необходимости продолжать нажимать на тормозную педаль. За счет этого, даже после отпускания тормозной педали транспортное средство может удерживаться в состоянии остановки на наклонной проезжей части. Как только будет обнаружена попытка водителя тронуться с места, тормоза наката и тормозная система прицепа автоматически отпускаются.
Кроме того, сенсорные средства 38, 60 могут использоваться для обнаружения того, не начинает ли транспортное средство катиться при активированном тормозе наката и сначала достигнутой им остановки. В случае обнаружения этого повышается тормозная сила за счет того, что тормозные цилиндры 30, 54 и/или имеющиеся, при необходимости, электромеханические исполнительные органы создают большие усилия затяжки колесных тормозов.
Узел 18 тормозной педали и модули 24, 19 непосредственно или косвенно связаны с одним или несколькими источниками электропитания (не показаны). Предпочтительным образом узел 18 тормозной педали посредством присоединения 86 связан с первым источником электропитания первой токовой цепи, питающей также модуль 24 и модуль 19 через его вывод 58А. Предпочтительным образом узел 18 тормозной педали связан далее посредством присоединения 87 со вторым источником электропитания второй токовой цепи, питающей также, при необходимости, блок управления стояночным тормозом. Таким образом, узел 18 тормозной педали предпочтительно связан с обеими токовыми цепями. Узел 18 тормозной педали имеет, тем самым, предпочтительно по меньшей мере двойное электропитание, гарантируя даже в случае простой неисправности свою функцию.
Электрический провод 68, связывающий модуль 19 с узлом 18 тормозной педали, предусмотрен в качестве первичной коммуникационной линии. Узел 18 тормозной педали имеет далее присоединение 88 для шины передачи данных, в частности для CAN-шины. Эта шина передачи данных связывает узел 18 тормозной педали через вход (не показан) с модулем 19. Шина передачи данных служит предпочтительным образом в качестве вторичной или резервной коммуникационной линии между узлом 18 тормозной педали и модулем 19. Поэтому вместо только одного присоединения 88 для резервирования предпочтительно предусмотрены по меньшей мере два канала передачи данных к устройствам тормозной системы, в частности к управляющему устройству 17.
Также для резервирования узел 18 тормозной педали содержит предпочтительно по меньшей мере два сенсора для регистрации выдаваемого в качестве электрического сигнала запроса на торможение заданного значения запроса на торможение, например запроса на замедление.
Также узел 18 тормозной педали имеет предпочтительным образом по меньшей мере одно присоединение для электрического соединения для управления приводным блоком транспортного средства с целью срабатывания поддерживающего моторного тормоза. Это значит, что посредством узла 18 тормозной педали можно формировать сигнал, который включает поддерживающий моторный тормоз или управляет им.
Узел 18 тормозной педали имеет предпочтительным образом присоединение для электрического соединения с ретардером для создания посредством него тормозного действия. Это значит, что узел 18 тормозной педали может формировать электрический сигнал для управления ретардером.
Также узел 18 тормозной педали имеет предпочтительным образом по меньшей мере одно присоединение для электрического соединения с электромоторными компонентами в кинематической цепи транспортного средства, например со стартерно-генераторным блоком, гибридным блоком и т.п., посредством которых достигается дополнительное поддерживающее тормозное действие. Это значит, что узел 18 тормозной педали формирует по меньшей мере один электрический сигнал для управления такими электромоторными компонентами для создания дополнительных тормозных действий.
В одном варианте (не показан) управляющая электроника или управляющий логический блок для управления тормозами на передней оси 12 и/или задней оси 14 встроена/встроен в узел 18 тормозной педали, так что отпадает соответствующая электроника или логика в модуле. Электромагнитные клапаны модуля 24 и 19 управляются в этом случае узлом 18 тормозной педали.
В общем, узел 18 тормозной педали образует, тем самым, устройство сопряжения между водителем, тормозной системой 16 и остальным транспортным средством.
На фиг.2 схематично изображено трехосное транспортное средство 92 также с передней 12 и задней 14 осями, первой дополнительной осью 94 в качестве второй задней оси, а также с тормозной системой 96 из трех тормозных контуров рабочего тормоза, приводимого в действие узлом 18 тормозной педали. Второй пример выполнения, в основном, аналогичен первому примеру выполнения. В частности, одинаковые части обозначены одинаковыми ссылочными позициями.
Первый модуль 98 по своей функциональности в отношении тормозов передней 12 и задней 14 осей аналогичен модулю 19 задней оси в первом примере на фиг.1. Однако управляющее устройство 99 в первом модуле 98 дополнительно формирует управляющий сигнал тормозной силы для тормозов первой дополнительной оси 94 и посредством управляющего логического блока 99А управляет в зависимости от управляющего сигнала тормозной силы через электрический провод 100 одним или несколькими клапанами во втором модуле 102 для управления сжатым воздухом. Второй модуль 102 пневмопроводом 104 связан с пневморесивером 48, а пневмопроводом 106 - с пневмопроводом 53 и, кроме того, с узлом 18 тормозной педали. Подаваемый по пневмопроводу 104 управляемый сжатый воздух подается по пневмопроводам 110 к тормозным цилиндрам 108. Пневматический резерв при отказе электрики обеспечивается через пневмопровод 106.
На колесах 112 первой дополнительной оси 94 предусмотрены сенсорные средства 114 скорости колеса, соединенные электрическими проводами 116 с первым модулем 98. Для определения скорости вращения колес 112 каждое из них содержит соединенный без возможности проворота индуктор 118, связанный электромагнитным путем с активно или пассивно работающим колесным сенсором 120. Первый модуль 98 посредством сенсорных средств 114 может устанавливать блокирование или повышенное пробуксовывание колес 112, в ответ на это посылать на второй модуль 102 управляющие сигналы, через клапан или клапаны во втором модуле 102 снижать давление в пневмопроводах 110 и, тем самым, уменьшать тормозные силы на колесах 112. Таким образом, выполняется антиблокировочная функция для колес 112.
На фиг.3 схематично изображено трехосное транспортное средство 92 из фиг.2 с тормозной системой 124 в соответствии с третьим примером выполнения. Тормозная система 124, в основном, аналогична тормозной системе 96 в соответствии со вторым примером выполнения. В частности, одинаковыми ссылочными позициями также обозначены одинаковые части. Тормозная система 124 содержит, однако, управляющее устройство 125, встроенное в первый модуль 126, выполненный в виде модуля задней оси, и в дополнительный первый модуль 128, выполненный в виде первого модуля дополнительной оси. При этом модуль 126 аналогичен модулю 19 в первом примере. Однако он дополнительно имеет присоединение для линии 130 передачи данных, которая обеспечивает обмен данными с модулем 128. В частности, сигнал запроса на торможение передается по линии 130 на модуль 128. По этой линии 130 возможен обмен также дополнительной информацией о процессе торможения, например, для тормозного вмешательства со стороны модуля регулирования динамики движения. Управление тормозами на дополнительной оси 94 со стороны модуля 128 происходит аналогично тормозам задней оси 14 со стороны его модуля 126. В частности, происходят расчет тормозных давлений и управление вмешательством антиблокировочной системы в отличие от второго примера. Поэтому электрические провода 116 соединяют колесные сенсоры 120 с модулем 128. Модуль 126 отличается от модуля 128, в основном, тем, что он дополнительно к управлению тормозами оси 14 и 94 управляет еще клапаном или клапанами в модуле 24 и управляющим клапаном 72 прицепа. Управляющий логический блок 99А для дополнительной оси 94 расположен в модуле 128.
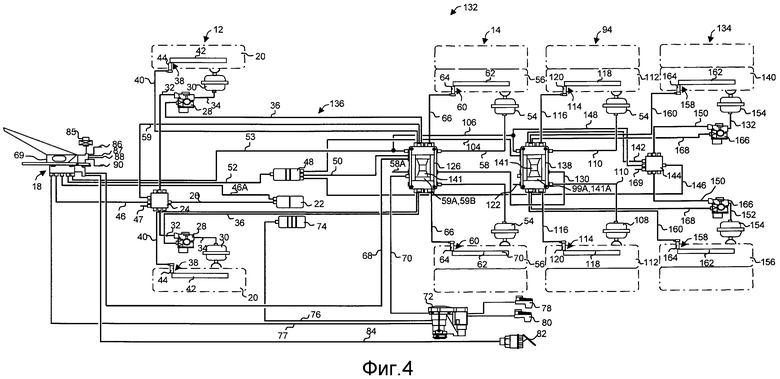
На фиг.4 схематично изображено четырехосное транспортное средство 132 с передней 12, задней 14, первой дополнительной 94 и второй дополнительной 134 осями, причем последняя является задней осью, а также с тормозной системой 136. В отношении функции рабочих тормозов для колес 20, 56, 112 на осях 12, 14, 94 тормозная система 136, в основном, аналогична тормозной системе 124 в третьем примере на фиг.3. Вместо первого модуля 128 дополнительной оси установлены первый модуль 138 в качестве первого модуля дополнительной оси и второй модуль 144 задней оси, который дополнительно управляет тормозами на колесах 140 второй дополнительной оси 134. В оба первых модуля 126, 138 встроено управляющее устройство 141. Управление тормозами со стороны модуля 138 происходит аналогично управлению тормозами на передней оси 12 со стороны модуля 126. Последний отличается от модуля 138, в частности, тем, что он дополнительно выполнен еще для управления управляющим клапаном 72 прицепа. Модуль 138 содержит управляющий логический блок 99А для тормозов первой дополнительной оси 94 и управляющий логический блок 141А для тормозов второй дополнительной оси 134.
Модуль 138 управляет через электрический провод 142 вторым модулем 144 в качестве второго модуля дополнительной оси и третьим модулем задней оси. В частности, он управляет одним или несколькими клапанами в модуле 144. Дополнительные присоединения соединяют модуль 144 через пневмопровод 146 с пневморесивером 48, а через пневмопровод 148, косвенно через пневмопроводы 106, 53 - с узлом 18 тормозной педали. Таким образом, давление в пневмопроводах 150, 152 к тормозным цилиндрам 154 управляется либо электропневматически посредством клапана или клапанов во втором модуле 144, либо пневматически посредством узла 18 тормозной педали через пневмопроводы 53, 106, 148.
На колесах 140 второй дополнительной оси 134 также предусмотрены сенсорные средства 158 скорости колеса, которые электрическими проводами 160 соединены с модулем 138. Сенсорные средства 158 содержат соответственно соединенный без возможности проворота с соответствующим колесом 140 индуктор 162, электромагнитно связанный с активно или пассивно работающим колесным сенсором 164. Таким образом, с помощью модуля 138 можно обнаружить блокирование или повышенное пробуксовывание колес 140. В ответ на обнаруженное блокирование или повышенное пробуксовывание колес 140 происходит управление клапанными блоками 166 через электрические провода 150, 168, посредством которых воздух по меньшей мере частично может быть удален из пневмопроводов 132, и, тем самым, могут быть уменьшены тормозные силы на колесах 140.
Модуль 144 может иметь присоединение 169 для электропитания.
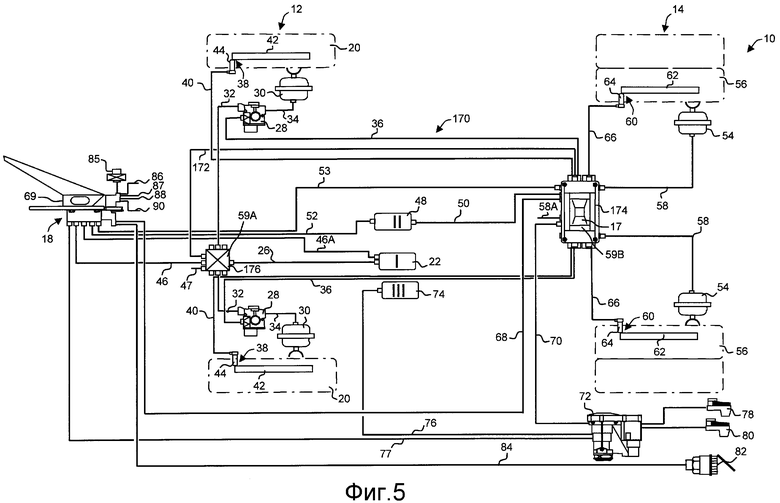
На фиг.5 схематично изображено двухосное транспортное средство 10 из фиг.1 с передней 12 и задней 14 осями, а также тормозной системой 170, в основном, аналогичной тормозной системе 16 в первом примере. Одинаковыми ссылочными позициями также обозначены одинаковые части.
В отличие от первого примера на фиг.1, вместо электрического провода 59 между модулями 19, 24 между первым 174 и вторым 176 модулями предусмотрена линия 172 передачи данных. По сравнению с первым примером модуль 176 обладает дополнительным интеллектом, а именно управляющим логическим блоком 59А. Клапан или клапаны в модуле 176 управляются не непосредственно им. Модуль 176 получает по линии 172 данные, с помощью которых он самостоятельно управляет клапаном или клапанами в нем. Расчет тормозных давлений и формирование сигнала тормозной силы происходят в модуле 174 за счет расположенного в нем управляющего устройства 17. Для питания электрической энергией модуль 176 имеет присоединение 47 для соединения с источником электропитания.
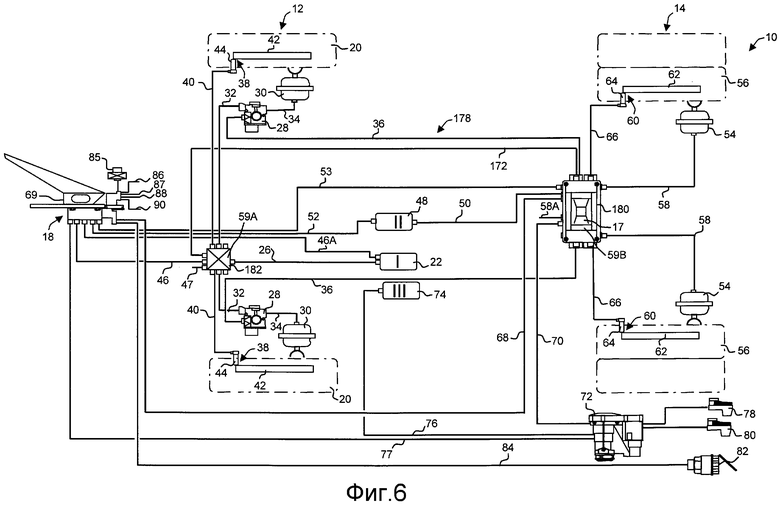
На фиг.6 схематично изображено двухосное транспортное средство 10 с передней 12 и задней 14 осями в пятом примере из фиг.5, а также с тормозной системой 178, лишь незначительно отличающейся от тормозной системы 170 на фиг.5. Одинаковыми ссылочными позициями также обозначены одинаковые части.
В противоположность первому модулю 174 на фиг.5, первый модуль 180 не соединен с сенсорными средствами 38 скорости колеса. Электрические провода 40 соединяют сенсорные средства 38 со вторым модулем 182, располагающим подходящими присоединениями. Данные определяемых скоростей колес передаются по линии 170 на модуль 180, который через электрические провода 36 управляет клапанными блоками 28.
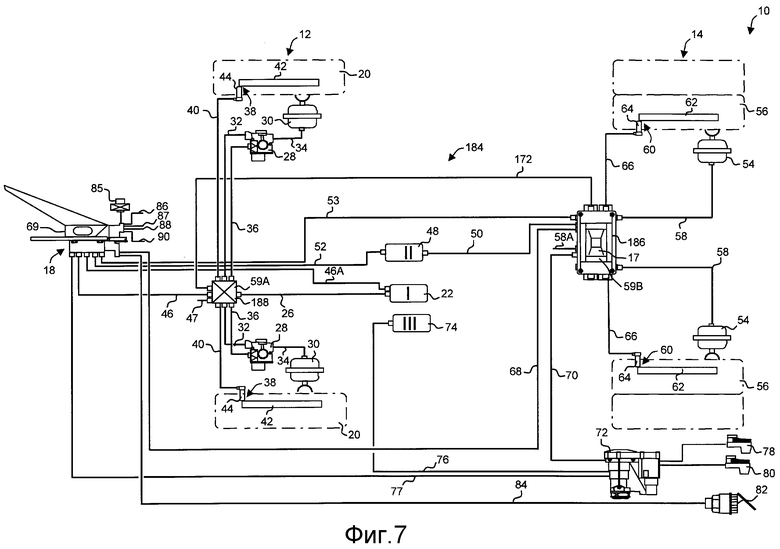
На фиг.7 схематично изображено двухосное транспортное средство 10 с передней 12 и задней 14 осями в шестом примере, а также с тормозной системой 184, которая отличается, в основном, управлением клапанными блоками 28 со стороны тормозной системы 178 в шестом примере. Тормозная система 184 содержит первый 186 и второй 188 модули. Модуль 188 электрическими проводами 36 соединен с клапанными блоками 28 и управляет ими. В остальном тормозная система 184 аналогична тормозной системе 176 на фиг.6. Одинаковыми ссылочными позициями также обозначены одинаковые части.
На фиг.8 схематично изображено трехосное транспортное средство 92 во втором примере из фиг.2 с передней 12 и задней 14 осями, дополнительной осью 94 в качестве второй задней оси и тормозной системой 190. Одинаковыми ссылочными позициями также обозначены одинаковые части. В упрощенном виде тормоза дополнительной оси 94 управляются аналогично тормозам передней оси 12. Для этого предусмотрен второй модуль 188' или модуль дополнительной оси, выполненный, как модуль передней оси, соответственно, второй модуль 188. Модуль задней оси или первый модуль 192 вычисляет, следовательно, тормозные силы для тормозов на всех трех осях 12, 14, 94 и управляет соответствующими тормозными силами или регулирует их посредством соответствующих управляющих сигналов. Модуль 188' линией 193 передачи данных соединен с модулем 192. По линии 193 модуль 188' получает данные, с помощью которых он управляет одним или несколькими клапанами в нем. Отрегулированное давление поступает по пневмопроводам 110, 194 к тормозному цилиндру 108. Модуль 188 может устанавливать блокирование или повышенное пробуксовывание колес 112 и в ответ на это через электрические провода 196 управлять клапанными блоками 198 между пневмопроводами 110, 194 для по меньшей мере частичного удаления воздуха из пневмопроводов 194. Для питания электрической энергией модуль 188' имеет подключение 122 для соединения с источником электропитания.
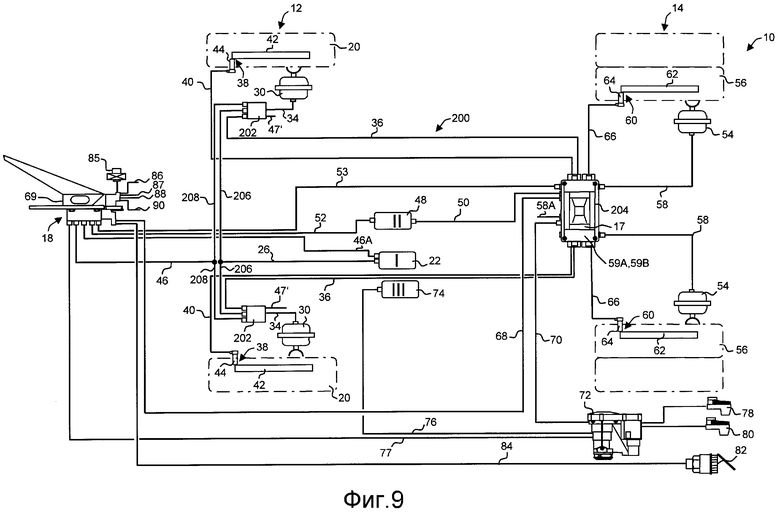
На фиг.9 схематично изображено двухосное транспортное средство 10 с передней 12 и задней 14 осями, а также с тормозной системой 200 в девятом примере. Этот пример отличается от первого примера на фиг.1 в основном, тем, что вместо второго модуля 24 и клапанных блоков 28 на колесах 20 передней оси 12 предусмотрены два вторых модуля 202 в качестве колесных модулей. Одинаковыми ссылочными позициями также обозначены одинаковые части.
Первый модуль 204 аналогичен по своей функции первому модулю 19 на фиг.1. Однако отпадает необходимость предусматривать помимо электрических проводов 36 дополнительные электрические провода для передачи сигналов ко вторым модулям 202. Электрические сигналы, передаваемые в первом примере по электрическим проводам 36, 59, могут поступать к модулям 202 сообща по электрическим проводам 36. Эти модули 202 соединены пневмопроводами 206, 26 с пневморесивером 22. Пневматически отрегулированное резервное давление подается к модулям 202 по пневмопроводам 46, 208. Клапан или клапаны в модулях 202 управляются непосредственно через электрические провода 36 модулем 204. Однако модули 202 не обладают собственным интеллектом, т.е. не имеют собственного управляющего логического блока.
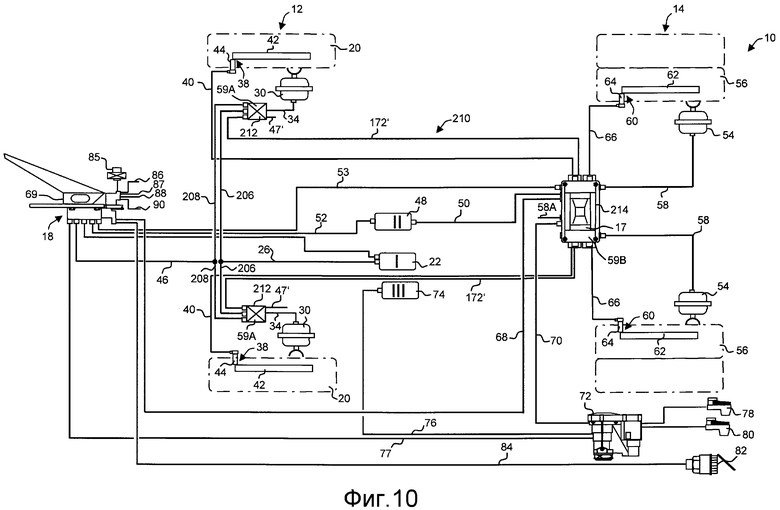
На фиг.10 схематично изображено двухосное транспортное средство 10 из фиг. 9 с передней 12 и задней 14 осями, а также с тормозной системой 210 в десятом примере. Одинаковыми ссылочными позициями также обозначены одинаковые части. Этот десятый пример соотносится с девятым примером на фиг.9 приблизительно так, как пятый пример на фиг.5 с первым примером на фиг.1. В отличие от вторых модулей 209 в девятом примере колесные модули или вторые модули 212 обладают дополнительным интеллектом таким образом, что они самопроизвольно могут управлять одним или несколькими клапанами. Информацию об этом управлении вторые модули получают по линиям 172' передачи данных от первого модуля 214, который по своей функциональности аналогичен первому модулю 174 в пятом примере на фиг.5. Модули 202 имеют по одному присоединению 47' для электропитания.
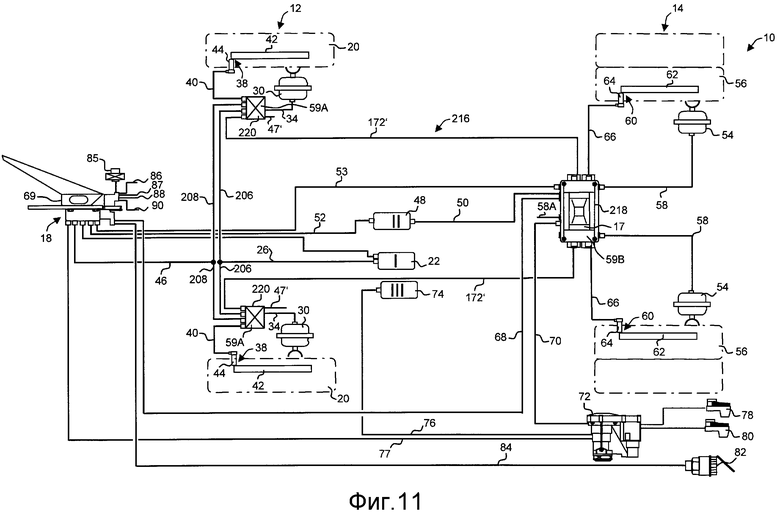
На фиг.11 схематично изображено двухосное транспортное средство 10 с передней 12 и задней 14 осями, а также с тормозной системой 216 в одиннадцатом примере. Этот пример, в основном, аналогичен десятому примеру на фиг.10 и соотносится с ним, как седьмой пример на фиг.7 с пятым примером на фиг.5. При этом одинаковыми ссылочными позициями также обозначены одинаковые части. Тормозная система 216 содержит первый модуль 218 в качестве модуля задней оси и вторые модули 220 в качестве колесных модулей на колесах 20 передней оси 12. Модули 220 обладают интеллектом, с помощью которого может устанавливаться блокирование или повышенное пробуксовывание колес 20 и в ответ на это по меньшей мере частично удаляться воздух из пневмопроводов 34. Для этого сенсорные средства 38 соединены электрическими проводами 40 непосредственно с модулями 220. Управляющее устройство 17 расположено в модуле 218. Модули 220 содержат каждый управляющий логический блок для управления одним или несколькими клапанами в них.
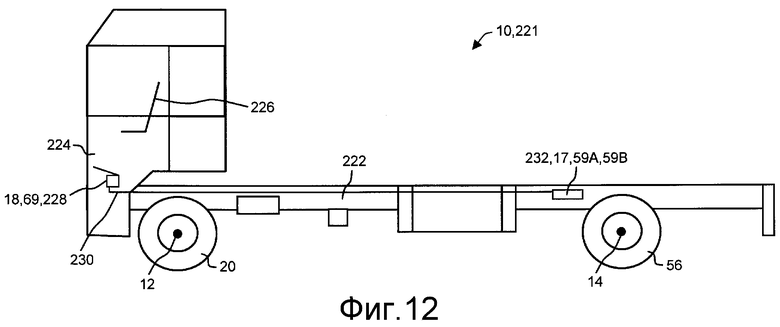
На фиг.12 на виде сбоку схематично и упрощенно изображено транспортное средство 10 с предложенной тормозной системой 221 в первом примере на фиг.1, выполненное в виде грузового автомобиля. Транспортное средство 10 содержит несущую конструкцию 222 и кабину 224. Кабина 224 выполнена в виде опрокидываемой вперед кабины с механическим или гидравлическим опрокидывающим механизмом и установлена на несущей конструкции 222. Последняя выполнена в виде лестничной рамы и помимо кабины 224 может нести и перевозить грузы, например контейнеры. Несущая конструкция 222 или лестничная рама опирается на колеса 20 передней оси 12 и колеса 56 задней оси 14.
Кабина 224 содержит сиденье 226 водителя и узел 18 тормозной педали с датчиком 69 тормозных значений. В узел 18 тормозной педали встроен интерфейс (переходное устройство) 228. Сформированный посредством датчика 69 сигнал запроса на торможение подается на интерфейс 228, а от него по шине 230 данных от узла 18 тормозной педали в кабине 224 - на встроенное в модуль 232 задней оси управляющее устройство 17. В ответ на сигнал запроса на торможение как для тормозов на колесах 20 передней оси 12, так и на колесах 56 задней оси 14, управляющее устройство 17 посредством соответствующих управляющих сигналов управляет соответствующими тормозными силами или регулирует их.
Посредством интерфейса 228 и шины 230 происходит обмен дополнительными данными между устройствами в кабине и устройствами на несущей конструкции. Например, водитель может с помощью устройства ввода в кабине сформировать сигнал для включения стояночного тормоза. Этот сигнал посылается на интерфейс 228, который передает соответствующие данные по шине 230 на управляющее устройство 17. Поэтому модуль 232 задней оси содержит помимо управляющего устройства 17 рабочего тормоза предпочтительно также модулятор стояночного тормоза. В качестве альтернативы модулятор стояночного тормоза может образовывать также отдельный блок. Данные для управления функцией стояночного тормоза подаются к этому отдельному блоку либо от модуля 232 задней оси или управляющего устройства 17, либо также предварительно через ответвление или распределитель в шине 230.
Кроме того, посредством интерфейса 228 и шины 230 можно управлять, например, также расположенными на несущей конструкции фонарями. Ими могут быть стоп-сигналы, ближний свет или же указатели поворота. Таким образом, по шине 230 может осуществляться любая связь между устройствами в или на кабине 224 и устройствами на несущей конструкции 222.
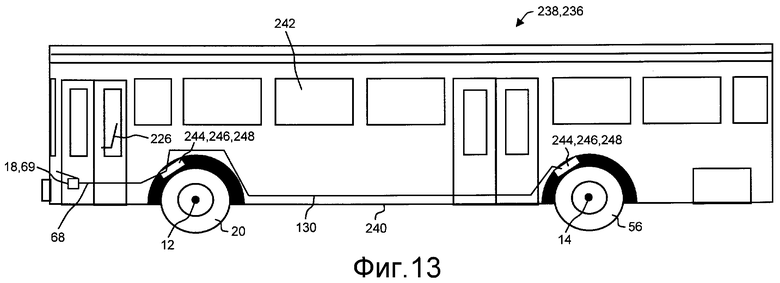
На фиг.13 на виде сбоку схематично и упрощенно изображена тормозная система 236 транспортного средства 238, выполненного в виде автобуса. Оси 12, 14 с колесами 20, 56 несут в этом случае несущий кузов, образующий несущую конструкцию 240. Транспортное средство 238 содержит кабину 242, которая опирается на несущую конструкцию 240 или кузов, охвачена ею и образует в кузове внутреннее пространство. Кабина 242 содержит сиденье 226 водителя и многочисленные дополнительные сиденья для пассажиров. Сигнал запроса на торможение, сформированный датчиком 69 тормозных значений узла 18 тормозной педали, подается по электрическому проводу 68 к управляющим устройствам 244. Они встроены в четыре колесных модуля 246. Последние выполнены одинаковыми и, в принципе, могут взаимозаменяться. Колесные модули 246 соединены между собой линиями 130 передачи данных и обмениваются по ним данными для управления тормозами на колесах 20, 56. Колесные модули 246 расположены в зоне колес 20, 56 в колесных нишах на несущей конструкции 240, где они легкодоступны извне для проведения возможных сервисных и/или ремонтных работ.
Каждый колесный модуль 246 относится, тем самым, к одному колесу 20 или 56, содержит один или несколько клапанов и управляет посредством этого клапана или этих клапанов тормозным давлением для приведения в действие тормоза соответствующего колеса 20, 56. Управляющее устройство 244 каждого колесного модуля 246 выполнено, напротив, в четырех экземплярах. Таким образом, каждый колесный модуль 246 может вычислять один управляющий сигнал тормозной силы для одного тормоза на каждом из колес 20, 56. За счет сравнения четырех вычисленных управляющих сигналов тормозной силы можно автоматически обнаружить возможные неисправности в управляющем устройстве и избежать воздействий неисправного управляющего устройства на характер торможения. Клапан или клапаны колесного модуля 246 управляются управляющими логическими блоками 248, к которым подаются управляющие сигналы тормозной силы от управляющего устройства 244, признаваемого функционально способным. В качестве альтернативы, управляющие логические блоки могут быть также выполнены резервными в четырех экземплярах, чтобы, при необходимости, непосредственно управлять клапанами в четырех колесных модулях 246.
В одном варианте осуществления изобретения (не показан), отличающемся от этого варианта, управляющее устройство выполнено в двух экземплярах и распределено по двум модулям осей, заменяющим соответственно два колесных модуля 246. Эти два модуля осей не могут, правда, обнаруживать неисправности соответственно другого модуля. Однако при выходе из строя одного управляющего устройства они могут выполнять функции вышедшего из строя управляющего устройства. Управляющее устройство или модули осей и в этом случае расположены предпочтительно в колесных нишах на осях 12, 14.
В другом альтернативном варианте осуществления изобретения (не показан) тормоза на колесах 20 и/или 56 приводятся в действие дополнительно или альтернативно электромеханическим путем. Таким образом, при необходимости, можно отказаться от клапанов в колесных модулях. Пневморезерв может быть предусмотрен, однако, при необходимости, может также отпасть. Многочисленные компоненты тормозной системы могут быть выполнены в нескольких экземплярах, чтобы уменьшить риск выхода из строя всей тормозной системы. В частности, все электрические компоненты могут иметь два присоединения для двух источников электропитания, в частности двух аккумуляторов. Посредством двух сенсоров в датчике 69 тормозных значений можно сформировать два сигнала запроса на торможение. Эти сигналы могут подаваться на управляющее устройство по двум отдельным проводам. При выходе из строя одного аккумулятора или источника электропитания, одного сенсора в датчике 69 тормозных значений, одного электрического провода 68 или шины 230 данных, или в случае резервного выполнения управляющего устройства даже при выходе из строя одного управляющего устройства транспортное средство может, тем самым, все еще надежно затормаживаться и эксплуатироваться.
Примеры на фиг.1-11 показывают особенно предпочтительные варианты осуществления изобретения. Однако они не являются его ограничением. В частности, изобретение может распространяться на транспортные средства с любым числом осей. Каждый первый или второй модуль может выполнять функции управления одним или несколькими тормозами на одном и/или нескольких колесах и/или осях. Управляющее устройство может быть распределено по любому числу модулей на несущей конструкции транспортного средства. При этом управляющее устройство расположено всегда вне кабины транспортного средства.
Другие, подключенные, в частности, к управляющему устройству части тормозной системы могут быть расположены также в кабине. В частности, можно, например, встроить второй модуль 188 в седьмом примере на фиг.7 и, тем самым, управляющий логический блок 59А в узел 18 тормозной педали. Таким образом, управляющее устройство расположено в первом модуле на несущей конструкции, тогда как управление одним или несколькими клапанами осуществляется управляющим логическим блоком 59А, а управление пневматическим давлением - этими клапанами в узле 18 тормозной педали.
Хотя это отдельно и не показано на чертежах, предложенная тормозная система предпочтительно содержит стояночный тормоз с тормозными цилиндрами с пружинными энергоаккумуляторами, в частности комбинированными тормозными цилиндрами с пружинными энергоаккумуляторами и мембранами, причем функция стояночного тормоза осуществляется посредством пружинных энергоаккумуляторов этих тормозных цилиндров. В этом случае стояночный тормоз выполнен электропневматическим. Дополнительно или в качестве альтернативы стояночный тормоз выполнен электромеханическим, так что его функция осуществляется посредством электромеханических компонентов. В качестве альтернативы функция стояночного тормоза может осуществляться традиционно посредством чисто пневмодеталей без электроуправления.
В примерах на фиг.1-13 блок управления встроен в управляющее устройство 17, 99, 125, 141, 244 и там преимущественно в модулятор задней оси. Однако изобретение включает в себя также варианты его осуществления, в которых блок управления встроен не в другое устройство, а в качестве самостоятельного конструктивного узла закреплен на раме транспортного средства.
Все приведенные в предшествующем описании и в формуле изобретения признаки могут также по отдельности комбинироваться с предложенной тормозной системой. Таким образом, изобретение не ограничено описанными и заявленными комбинациями признаков. Напротив, все комбинации отдельных признаков следует рассматривать как раскрытые.


Группа изобретений относится к области автомобильного транспорта, в частности к блокам управления тормозной системой. Транспортное средство содержит несущую конструкцию и кабину, опирающуюся на несущую конструкцию и содержащую сиденье водителя, а также блок управления для управления тормозной системой транспортного средства. Блок управления обладает дополнительной функциональностью для управления электронной системой пневмоподвески. Блок управления выполнен с возможностью расположения снаружи кабины на несущей конструкции. Блок управления и управление системой пневмоподвески имеют один общий корпус. 2 н. и 24 з.п. ф-лы, 13 ил.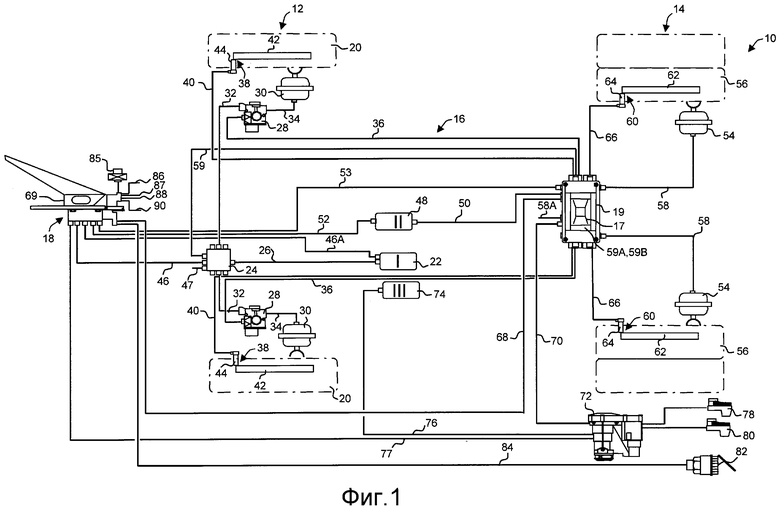
1. Блок управления для управления тормозной системой транспортного средства (10; 92; 132; 238), причем транспортное средство (10; 92; 132; 238) содержит несущую конструкцию (222; 240) и кабину (224; 242), опирающуюся на несущую конструкцию (222; 240) и содержащую по меньшей мере одно сиденье (226) водителя, причем блок (17; 99; 125; 141; 244) управления обладает дополнительной функциональностью для управления электронной системой пневмоподвески, причем блок (17; 99; 125; 141; 244) управления выполнен с возможностью расположения снаружи кабины (224; 242) на несущей конструкции (222; 240), и причем блок (17; 99; 125; 141; 244) управления и управление системой пневмоподвески имеют один общий корпус.
2. Блок по п.1, отличающийся тем, что он обладает дополнительной функциональностью для управления системой контроля давления в шинах.
3. Блок по п.2, отличающийся тем, что ABS-провода (40; 66), ведущие от него к сенсорам (38; 60) частоты вращения колес, используются в качестве антенн для приема сигналов модулей контроля давления в шинах, которые определяют давление в шинах и установлены в или на колесах (20; 56) или клапанах шин транспортного средства.
4. Блок по п.2, отличающийся тем, что ABS-провода (40; 66), ведущие от него к сенсорам (38; 60) частоты вращения колес, используются в качестве электрических подводящих проводов к размещенным в колесных нишах транспортного средства антеннам для приема сигналов модулей контроля давления в шинах.
5. Блок по п.3 или 4, отличающийся тем, что с помощью передаваемых по ABS-проводам (40; 66) сигналов модулей контроля давления в шинах осуществляется соотнесение этих модулей с колесными нишами или колесами (20; 56) транспортного средства.
6. Блок по одному из пп.1-4, отличающийся тем, что он обладает дополнительной функциональностью для управления модулятором стояночного тормоза, антиблокировочной системой, устройством регулирования динамики движения и/или управляемым электронным путем воздухоподготовительным устройством.
7. Блок по п.5, отличающийся тем, что он обладает дополнительной функциональностью для управления модулятором стояночного тормоза, антиблокировочной системой, устройством регулирования динамики движения и/или управляемым электронным путем воздухоподготовительным устройством.
8. Блок по одному из пп.1-4 или 7, отличающийся тем, что он обладает дополнительной функциональностью для вспомогательных для водителя систем.
9. Блок по п.5, отличающийся тем, что он обладает дополнительной функциональностью для вспомогательных для водителя систем.
10. Блок по п.6, отличающийся тем, что он обладает дополнительной функциональностью для вспомогательных для водителя систем.
11. Блок по п.8, отличающийся тем, что вспомогательная для водителя система выполняет функции поддержания продольной устойчивости (LDW), адаптивного регулирования скорости (АСС), контроля мертвого угла (BSD) и/или автономной аварийной тормозной системы (AEBS).
12. Блок по п.9 или 10, отличающийся тем, что вспомогательная для водителя система выполняет функции поддержания продольной устойчивости (LDW), адаптивного регулирования скорости (АСС), контроля мертвого угла (BSD) и/или автономной аварийной тормозной системы (AEBS).
13. Блок по одному из пп.1-4, 7, 9-11, отличающийся тем, что он содержит по меньшей мере один сенсор для определения режима движения транспортного средства.
14. Блок по п.5, отличающийся тем, что он содержит по меньшей мере один сенсор для определения режима движения транспортного средства.
15. Блок по п.6, отличающийся тем, что он содержит по меньшей мере один сенсор для определения режима движения транспортного средства.
16. Блок по п.8, отличающийся тем, что он содержит по меньшей мере один сенсор для определения режима движения транспортного средства.
17. Блок по п.12, отличающийся тем, что он содержит по меньшей мере один сенсор для определения режима движения транспортного средства.
18. Блок по п.13, отличающийся тем, что сенсор представляет собой сенсор ускорения, сенсор скорости рыскания и/или сенсор наклона.
19. Блок по одному из пп.14-17, отличающийся тем, что сенсор представляет собой сенсор ускорения, сенсор скорости рыскания и/или сенсор наклона.
20. Блок по одному из пп.1-4, 7, 9-11, 14-18, отличающийся тем, что в ответ на сигнал запроса на торможение от расположенного в кабине (224; 242) узла (18) тормозной педали с датчиком (69) тормозных значений блок управления формирует по меньшей мере один управляющий сигнал тормозной силы для управления - в частности, для зависимого от сигнала запроса на торможение повышения, поддержания или уменьшения - тормозной силой по меньшей мере одного тормоза тормозной системы (16; 96; 124; 136; 170; 178; 184; 190; 200; 210; 216).
21. Блок по п.5, отличающийся тем, что в ответ на сигнал запроса на торможение от расположенного в кабине (224; 242) узла (18) тормозной педали с датчиком (69) тормозных значений блок управления формирует по меньшей мере один управляющий сигнал тормозной силы для управления - в частности, для зависимого от сигнала запроса на торможение повышения, поддержания или уменьшения - тормозной силой по меньшей мере одного тормоза тормозной системы (16; 96; 124; 136; 170; 178; 184; 190; 200; 210; 216).
22. Блок по п.6, отличающийся тем, что в ответ на сигнал запроса на торможение от расположенного в кабине (224; 242) узла (18) тормозной педали с датчиком (69) тормозных значений блок управления формирует по меньшей мере один управляющий сигнал тормозной силы для управления - в частности, для зависимого от сигнала запроса на торможение повышения, поддержания или уменьшения - тормозной силой по меньшей мере одного тормоза тормозной системы (16; 96; 124; 136; 170; 178; 184; 190; 200; 210; 216).
23. Блок по п.8, отличающийся тем, что в ответ на сигнал запроса на торможение от расположенного в кабине (224; 242) узла (18) тормозной педали с датчиком (69) тормозных значений блок управления формирует по меньшей мере один управляющий сигнал тормозной силы для управления - в частности, для зависимого от сигнала запроса на торможение повышения, поддержания или уменьшения - тормозной силой по меньшей мере одного тормоза тормозной системы (16; 96; 124; 136; 170; 178; 184; 190; 200; 210; 216).
24. Блок по п.12, отличающийся тем, что в ответ на сигнал запроса на торможение от расположенного в кабине (224; 242) узла (18) тормозной педали с датчиком (69) тормозных значений блок управления формирует по меньшей мере один управляющий сигнал тормозной силы для управления - в частности, для зависимого от сигнала запроса на торможение повышения, поддержания или уменьшения - тормозной силой по меньшей мере одного тормоза тормозной системы (16; 96; 124; 136; 170; 178; 184; 190; 200; 210; 216).
25. Блок по п.13, отличающийся тем, что в ответ на сигнал запроса на торможение от расположенного в кабине (224; 242) узла (18) тормозной педали с датчиком (69) тормозных значений блок управления формирует по меньшей мере один управляющий сигнал тормозной силы для управления - в частности, для зависимого от сигнала запроса на торможение повышения, поддержания или уменьшения - тормозной силой по меньшей мере одного тормоза тормозной системы (16; 96; 124; 136; 170; 178; 184; 190; 200; 210; 216).
26. Тормозная система с блоком управления по одному из пп.1-25.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СПОСОБ ПРОИЗВОДСТВА СМЕТАНЫ | 1994 |
|
RU2077215C1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Система регулирования тормозных сил многоосного транспортного средства | 1989 |
|
SU1652140A1 |

