Уровень техники
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к устройству управления для управления тормозом транспортного средства.
2. Описание предшествующего уровня техники
[0002] Публикация японской не прошедшей экспертизу патентной заявки № 2012-96619 (JP 2012-96619 A) раскрывает систему управления поперечным движением транспортного средства, которая управляет поперечным движением транспортного средства, приводя в действие актуатор, предусмотренный на каждом из переднего блока рулевого управления, заднего блока рулевого управления и тормоза. Система, раскрытая в JP 2012-96619 A, получает доступность, которая представляет управляемый диапазон актуатора, вычисляет упреждающее (F/F) запрашиваемое значение для выполнения упреждающего управления для каждого актуатора и запрашиваемое значение обратной связи (F/B) для выполнения управления с обратной связью для каждого актуатора с помощью полученной доступности, и определяет механизм, который должен управляться, и величину управления, в конечном счете, формируемую для механизма на основе вычисленного F/F-запрашиваемого значения и вычисленного F/B-запрашиваемого значения.
Сущность изобретения
[0003] Расширяется применение систем поддержки вождения, таких как система автоматического вождения, система автоматической парковки и т.п. Системы поддержки вождения выполняют запросы относительно актуаторов, которые управляют приведением в движение, торможением и рулением транспортного средства. Поскольку число типов систем поддержки вождения увеличивается, число запросов для каждого актуатора также увеличивается. Следовательно, обработка множества запросов становится усложненной в устройстве управления (ECU), которое управляет каждым актуатором.
[0004] Изобретение предоставляет устройство управления, приспособленное для всестороннего управления запросами, передаваемыми от множества блоков, запрашивающих применение, которые реализуют функции поддержки вождения.
[0005] Аспект изобретения относится к устройству управления для управления тормозом транспортного средства, включающему в себя: блок арбитража, сконфигурированный, чтобы принимать запросы движения для множества актуаторов, которые используются для управления движением транспортного средства, от множества блоков, запрашивающих применение, связанных с функциями поддержки вождения, и принимать решение по принятым запросам движения; блок распределения команд, сконфигурированный, чтобы распределять команды контроллерам для управления актуаторами на основе результата арбитража, полученного посредством блока арбитража; и контроллер обратной связи, сконфигурированный, чтобы сообщать по обратной связи значение управляющей записи, указывающее движение транспортного средства, которое измеряется с помощью блоков датчиков, блокам, запрашивающим применение, и реализовать движение транспортного средства, запрашиваемое посредством блоков, запрашивающих применение.
[0006] В устройстве управления согласно вышеописанному аспекту блок арбитража может быть сконфигурирован, чтобы принимать решение по каждой из информации, указывающей продольное движение транспортного средства, включенной в запросы движения, и информации, указывающей поперечное движение транспортного средства.
[0007] В устройстве управления согласно вышеописанному аспекту устройство управления может дополнительно включать себя блок формирования запросов. Блок формирования запросов может быть сконфигурирован, чтобы выводить запросы вождения контроллерам для управления актуаторами на основе команд, распределяемых посредством блока распределения команд.
[0008] В устройстве управления согласно вышеописанному аспекту блоки датчиков могут включать в себя множество датчиков скорости колес, предусмотренных на соответствующих колесах; и выходные данные, полученные посредством датчиков скорости колес, могут быть непосредственно введены в устройство управления по сигнальной линии.
[0009] В устройстве управления согласно вышеописанному аспекту устройство управления может дополнительно включать в себя контроллер движения транспортного средства. Контроллер движения транспортного средства может быть сконфигурирован, чтобы предпочтительно приводить в действие актуаторы, чтобы всесторонне управлять стабильностью вождения транспортного средства.
[0010] С помощью различных аспектов изобретения возможно предоставлять устройство управления, приспособленное для всестороннего управления запросами, передаваемыми от множества блоков, требующих применения, которые реализуют функции поддержки вождения.
Краткое описание чертежей
[0011] Признаки, преимущества и техническое и промышленное значение примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на сопровождающие чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
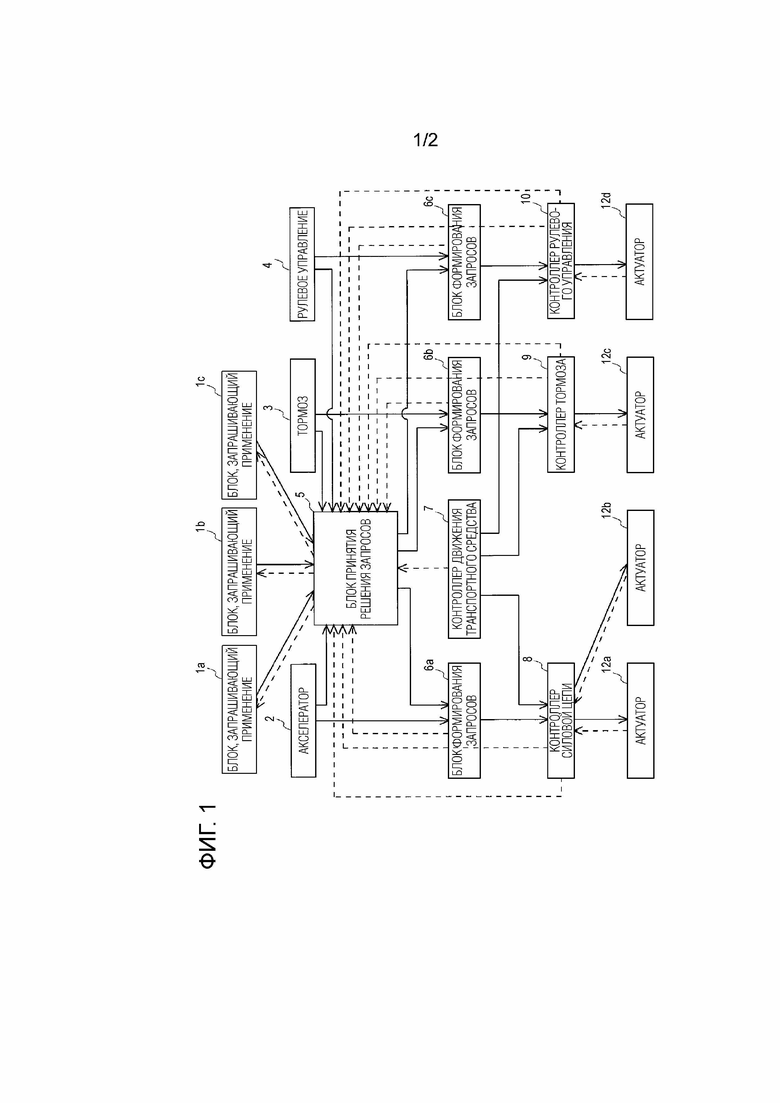
Фиг. 1 - это функциональная блок-схема, показывающая систему управления транспортным средством согласно вариантам осуществления изобретения; и
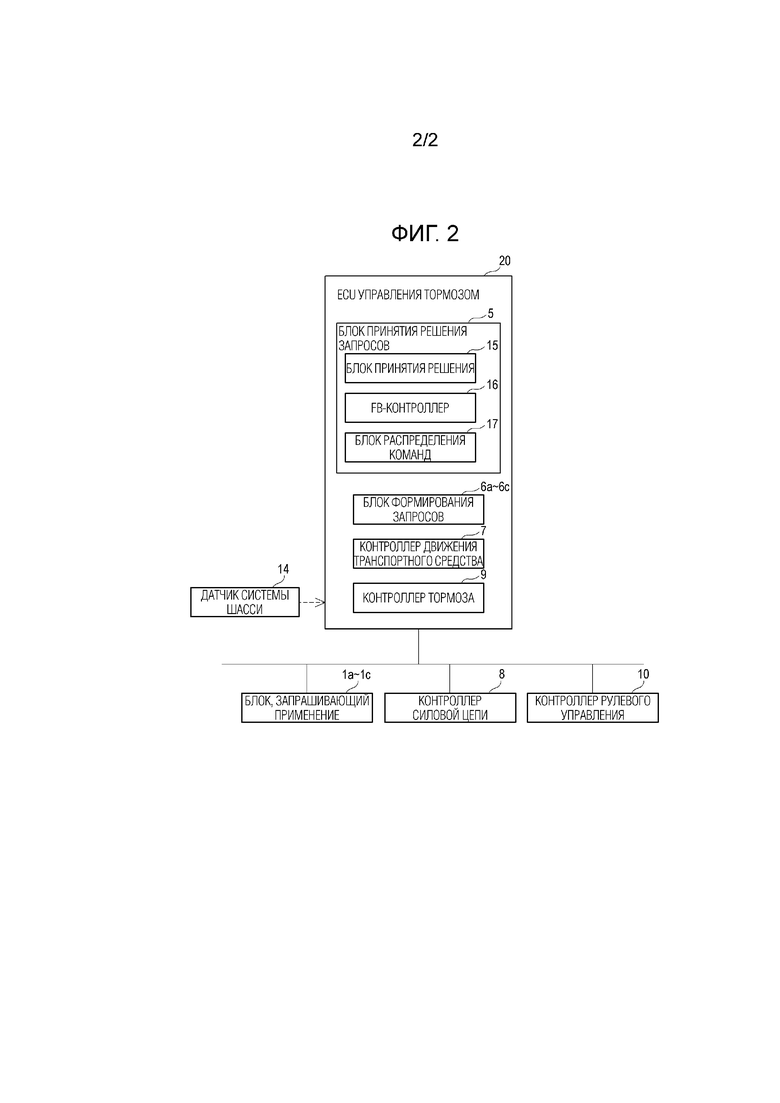
Фиг. 2 - это блок-схема, показывающая конфигурацию ECU управления тормозом согласно вариантам осуществления изобретения.
Подробное описание вариантов осуществления
Варианты осуществления
[0012] В вариантах осуществления изобретения устройство управления транспортным средством (ECU управления тормозом) для управления тормозом имеет функцию всестороннего управления запросами, отправленными от множества блоков, запрашивающих применение, множеству актуаторов, и функцию обратной связи по поведению транспортного средства относительно блоков, запрашивающих применение. В случае, когда запросы выдаются из блоков, запрашивающих применение, относительно соответствующих актуаторов в одно и то же время, ECU управления тормозом регулирует запросы, чтобы упрощать процесс в контроллере для управления соответствующими актуаторами.
Конфигурация
[0013] Фиг. 1 - это функциональная блок-схема, показывающая систему управления транспортным средством согласно вариантам осуществления изобретения, а фиг. 2 - это блок-схема, показывающая конфигурацию ECU 20 управления тормозом согласно вариантам осуществления изобретения.
[0014] Система управления транспортным средством, показанная на фиг. 1, включает в себя множество блоков 1a-1c, запрашивающих применение, акселератор 2, тормоз 3, рулевое управление 4, блок 5 арбитража запросов, блоки 6a-6c формирования запросов, контроллер 7 движения транспортного средства, контроллер 8 силовой цепи, контроллер 9 тормоза, контроллер 10 рулевого управления и актуаторы 12a-12d.
[0015] Блоки 1a-1c, запрашивающие применение, являются приложениями (также называемыми улучшенными приложениями безопасности) для реализации функций поддержки вождения транспортного средства, таких как автоматическое вождение, автоматическая парковка, адаптивная система "круиз-контроля", система помощи удержания на полосе движения, система торможения для смягчения столкновения и т.п. Блоки 1a-1c, запрашивающие применение, выводят запрос для управления движением транспортного средства актуаторам 12a-12d на основе каждой из функций поддержки вождения. Типично, блоки 1a-1c, запрашивающие применение, реализуются с помощью выполнения соответствующих приложений посредством ECU. В некоторых случаях, блоки 1a-1c, запрашивающие применение, могут одновременно выполнять приложения в зависимости от функции поддержки вождения, которая должна быть использована. На фиг. 1 три блока 1a-1c, запрашивающих применение, показаны ради удобства в описании. Однако, число блоков, запрашивающих применение для реализации функций поддержки вождения, не ограничивается тремя. Два или меньше или четыре или больше блоков, запрашивающих применение, может быть установлено в транспортном средстве в некоторых случаях. Блоки 1a-1c, запрашивающие применение, выводят сигналы запросов для приведения в действие актуаторов 12a-12d в блок 5 арбитража запросов, который будет описан позже.
[0016] Акселератор 2, тормоз 3 и рулевое управление 4 являются устройствами ввода, приводимыми в действие водителем для управления движением транспортного средства. Запрос, введенный водителем, задействующим акселератор 2 (педаль акселератора), включает в себя информацию, которая указывает величину движущей силы или силы торможения, требуемой водителем, и сообщается блоку 6a формирования запросов и блоку 5 арбитража запросов. Кроме того, запрос, введенный водителем, задействующим тормоз 3 (педаль тормоза), включает в себя информацию, которая указывает величину силы торможения, требуемой водителем, и сообщается блоку 6b формирования запросов и блоку 5 арбитража запросов. Кроме того, запрос, введенный водителем, задействующим рулевое управление 4 (рулевое колесо), включает в себя информацию, которая указывает величину поперечного движения или величину поворота транспортного средства, требуемую водителем, и сообщается блоку 6c формирования запросов и блоку 5 арбитража запросов. Причиной для сообщения запросов на основе действий акселератора 2, тормоза 3 и рулевого управления 4 блоку 5 арбитража запросов является то, что входные запросы могут быть сообщены блокам 1a-1c, запрашивающим применение, через блок 5 арбитража запросов.
[0017] Блок 5 арбитража запросов принимает сигналы запросов, которые выводятся из блоков 1a-1c, запрашивающих применение, и регулирует принятые запросы.
[0018] Как показано на фиг. 2, блок 5 арбитража запросов включает в себя блок 15 арбитража, контроллер 16 обратной связи (FB) и блок 17 распределения команд.
[0019] Блок 15 арбитража регулирует запросы, которые должны подаваться от блоков 1a-1c, запрашивающих применение, к актуаторам 12a-12d. Блок 15 арбитража выполняет арбитраж для информации, указывающей продольное движение транспортного средства, которая включена в сигнал запроса, принятый от блоков 1a-1c, запрашивающих применение, и информации, указывающей поперечное движение транспортного средства, которая включена в принятый набор данных. Информация, указывающая продольное движение транспортного средства, принятая от блоков 1a-1c, запрашивающих применение, является, например, ускорением, а информация, указывающая поперечное перемещение транспортного средства, является, например, ускорением или углом поворота управляемых колес. Например, блок 15 арбитража выполняет арбитраж, выбирая один сигнал запроса из принятых сигналов запроса на основе предварительно определенного критерия выбора или настройки допустимого диапазона управления на основе принятых сигналов запросов.
[0020] FB-контроллер 16 измеряет движение транспортного средства на основе выходного значения датчика 14 системы шасси, предусмотренного в шасси. Датчик 14 системы шасси включает в себя множество видов датчиков для измерения количественного состояния транспортного средства и величины срабатывания операционного блока, задействуемого водителем. Примеры датчика для измерения количественного состояния транспортного средства, включают в себя датчик скорости колеса, предусмотренный в каждом колесе, датчик ускорения для измерения ускорения транспортного средства в продольном направлении и/или поперечном направлении, датчик угла поворота вокруг вертикальной оси для измерения угла поворота вокруг вертикальной оси транспортного средства и т.п. Примеры датчика для измерения величины срабатывания операционного блока, задействуемого водителем, включают в себя датчик угла поворота управляемых колес для обнаружения величины срабатывания рулевого управления, датчик педали тормоза для обнаружения величины нажатия педали тормоза, датчик педали акселератора для обнаружения величины нажатия педали акселератора и т.п. Кроме того, FB-контроллер 16 получает информацию, указывающую значения управляющих записей и состояния срабатывания актуаторов 12a-12d, которые сообщаются от контроллера 8 силовой цепи, контроллера 9 тормоза и контроллера 10 рулевого управления, которые будут описаны позже. FB-контроллер 16 сообщает по обратной связи различные виды информации, полученной таким образом, блокам 1a-1c, запрашивающим применение, а также выводит полученные различные виды информации в блок 17 распределения команд, который будет описан позже. На основе различных видов информации, сообщенной по обратной связи от FB-контроллера 16, блоки 1a-1c, запрашивающие применение, могут наблюдать состояние выполнения процесса управления для предоставления функций поддержки вождения и могут изменять или останавливать процесс управления при необходимости. Различные виды информации, которые выводятся из FB-контроллера 16 в блок 17 распределения команд, используются, когда блок 17 распределения команд формирует команды для блоков 6a-6c формирования запросов, которые будут описаны позже, и используются для управления по обратной связи контроллером 8 силовой цепи, контроллером 9 тормоза и контроллером 10 рулевого управления, чтобы приводить движение транспортного средства близко к целевому движению, которое является результатом арбитража, предоставленным посредством блока 15 арбитража.
[0021] На основе результата арбитража, предоставленного посредством блока 15 арбитража, блок 17 распределения команд распределяет команды контроллерам, которые управляют актуаторами 12a-12d. При распределении команд блок 17 распределения команд ссылается на различные виды информации, которые выводятся из FB-контроллера 16, и формирует команды, которые должны подаваться к контроллеру 8 силовой цепи, контроллеру 9 тормоза и контроллеру 10 рулевого управления, так что движение транспортного средства приводится близко к целевому движению. Блок 17 распределения команд выводит распределенные команды в блоки 6a-6c формирования запросов, описанные позже. Поскольку блок 17 распределения команд распределяет команды на основе выходных данных FB-контроллера 16, контроллер 8 силовой цепи, контроллер 9 тормоза и контроллер 10 рулевого управления подвергаются управлению по обратной связи на основе соответствующих значений управляющих записей.
[0022] Блок 6a формирования запроса формирует запрос для актуаторов 12a и 12b на основе команды, предоставленной от блока 17 распределения команд, и выводит сформированный запрос в контроллер 8 силовой цепи. Аналогично, на основе команд, предоставленных от блока 17 распределения команд, блоки 6b и 6c формирования запросов формируют запросы для актуаторов 12c и 12d, соответственно, и выводят сформированные запросы в контроллер 9 тормоза и контроллер 10 рулевого управления, соответственно. Возможен случай, когда запросы от водителя, введенные посредством операций акселератора 2, тормоза 3 и рулевого управления 4, и один или более запросов от блоков 1a-1c, запрашивающих применение, вводятся в блоки 6a-6c формирования запросов в одно и то же время. Например, может быть рассмотрен сценарий, в котором водитель замедляется или останавливает транспортное средство, задействуя тормоз 3 с намерением избежать опасности во время автоматического вождения или во время автоматической парковки, или сценарий, в котором транспортное средство перемещается поперечно или поворачивает посредством задействования рулевого управления 4 с намерением избежать опасности для водителя во время управления посредством системы помощи удержания на полосе движения. Следовательно, когда запрос от водителя и один или более запросов от блоков 1a-1c, запрашивающих применение, вводятся в одно и то же время, каждый из блоков 6a-6c формирования запроса выбирает один из запросов на основе критериев выбора, подготовленных заранее. Блоки 6a, 6b и 6c формирования запроса выдают инструкции привода контроллеру 8 силовой цепи, контроллеру 9 тормоза и контроллеру 10 рулевого управления, соответственно, на основе соответствующих запросов, выбранных посредством регулировки. Кроме того, каждый из блоков 6a, 6b и 6c формирования запросов выбирает либо запрос от водителя, либо одни или более запросов от блоков 1a-1c, запрашивающих применение, и сообщает выбранный результат блоку 5 арбитража запросов.
[0023] Контроллер 7 движения транспортного средства всесторонне управляет устойчивостью привода транспортного средства, управляя актуаторами 12a-12d через контроллер 8 силовой цепи, контроллер 9 тормоза и контроллер 10 рулевого управления. Примеры управления, выполняемого посредством контроллера 7 движения транспортного средства, могут включать в себя управление для пресечения вращения вхолостую шин и бокового скольжения транспортного средства посредством управления выходной мощностью силовой цепи и силой торможения, управления для предотвращения блокировки шин при резком торможении, управления для формирования большой силы торможения посредством обнаружения экстренного торможения из величины нажатия и скорости нажатия тормоза, и т.п. Управление для поддержания стабильности вождения, выполняемое посредством контроллера 7 движения транспортного средства, должно выполняться, как только стабильность вождения транспортного средства ухудшается. Следовательно, управление для поддержания стабильности вождения выполняется независимо от инструкции вождения, предоставленной от водителя, и инструкции вождения, предоставленной от блоков 1a-1c, запрашивающих применение. При выдаче инструкции вождения какому-либо одному из контроллера 8 силовой цепи, контроллеру 9 тормоза и контроллеру 10 рулевого управления контроллер 7 движения транспортного средства сообщает блоку 5 арбитража запросов информацию, связанную с величиной управления (доступностью), реализуемой в настоящее время посредством актуаторов 12a-12d. Информация о доступности сообщается из блока 5 арбитража запросов блокам 1a-1c, запрашивающим применение. Во время работы контроллера 7 движения транспортного средства актуаторы 12a-12d могут не иметь возможности реализовать запрос, запрашиваемый посредством блоков 1a-1c, запрашивающих применение, в некоторых случаях. Поскольку контроллер 7 движения транспортного средства сообщает блокам 1a-1c, запрашивающим применение, информацию о доступности через блок 5 арбитража запросов, возможно, чтобы блоки 1a-1c, запрашивающие применение, изменяли или регулировали процесс управления во время исполнения.
[0024] Контроллер 8 силовой цепи управляет операциями актуаторов 12a и 12b, которые составляют силовую цепь (иногда называемую цепью привода), тем самым, формируя движущую силу или силу торможения, запрашиваемую из блока 6a формирования запроса или контроллера 7 движения транспортного средства. Контроллер 8 силовой цепи реализуется посредством, например, какого-либо одного из ECU управления двигателем, ECU гибридного управления, ECU трансмиссии и т.п., или их сочетания. На фиг. 1, ради удобства в описании, два актуатора 12a и 12b показаны как цели управления контроллера 8 силовой цепи. Однако число актуаторов, управляемых посредством контроллера 8 силовой цепи, может быть одним или тремя или более в зависимости от конфигурации силовой цепи транспортного средства. Примеры актуаторов 12a и 12b, составляющих силовую цепь, включают в себя двигатель, приводной мотор, муфту сцепления, преобразователь крутящего момента, коробку передач, механизм для распределения крутящего момента переднему колесу и заднему колесу в транспортном средстве с приводом на четырех колеса и т.п.
[0025] Контроллер 9 тормоза управляет работой тормозных актуаторов, предусмотренных на соответствующих колесах, тем самым, формируя силу торможения, запрашиваемую посредством блока 6b формирования запроса или контроллера 7 движения транспортного средства. Контроллер 9 тормоза непосредственно соединяется с датчиком 14 системы шасси через сигнальную линию. Выходное значение датчика скорости колеса каждого колеса, включенного в датчик 14 системы шасси, вводится в контроллер 9 тормоза через сигнальную линию.
[0026] Контроллер 10 рулевого управления управляет вращательным усилием мотора блока электроусилителя руля (EPS), тем самым, управляя ориентацией шины, соединенной через механизм реечной зубчатой передачи. Контроллер 10 рулевого управления реализуется, например, посредством ECU рулевого управления с усилением.
[0027] Как описано выше, запрос от соответствующего одного из блоков 6a-6c формирования запросов и запрос от контроллера 7 движения транспортного средства могут быть одновременно введены в каждый из контроллера 8 силовой цепи, контроллера 9 тормоза и контроллера 10 рулевого управления в некоторых случаях. Например, когда контроллер 8 силовой цепи формирует запрашиваемую движущую силу на основе задействования акселератора 2 водителем, если боковое скольжение колес обнаруживается, контроллер 7 движения транспортного средства управляет силой торможения, формируемой в тормозном актуаторе каждого колеса, и выходной мощностью двигателя или приводного мотора для того, чтобы пресекать боковое скольжение колеса. В этом случае, для того, чтобы определять приоритет пресечения бокового скольжения, выполняемого посредством контроллера 7 движения транспортного средства, контроллер 8 силовой цепи, контроллер 9 тормоза и контроллер 10 рулевого управления управляют соответствующими актуаторами 12a-12d, определяя приоритет запроса от контроллера 7 движения транспортного средства.
[0028] Контроллер 8 силовой цепи, контроллер 9 тормоза и контроллер 10 рулевого управления приводят в действие актуаторы 12a-12d на основе запросов от блоков 6a-6c формирования запросов, соответственно. Контроллер 8 силовой цепи, контроллер 9 тормоза и контроллер 10 рулевого управления получают информацию о рабочих состояниях соответствующих актуаторов 12a-12d на основе ответных сигналов от соответствующих актуаторов 12a-12d или измеренных значений, полученных посредством соответствующих датчиков. Примеры информации о рабочих состояниях актуаторов 12a-12d включают в себя информацию, указывающую доступность соответствующих актуаторов 12a-12d (информацию, указывающую могут ли соответствующие актуаторы 12a-12d реагировать как ожидается или нет), информацию, указывающую наблюдаемые значения выходных сигналов соответствующих актуаторов 12a-12d, таких как движущая сила, сила торможения, поворот вокруг вертикальной оси, угол поворота управляемых колес и т.п., которые реализуются посредством соответствующих актуаторов 12a-12d, информацию, характерную для соответствующих актуаторов 12a-12d, такую как, сдвигается или нет температура тормозной колодки в направлении перегрева, и т.п. Контроллер 8 силовой цепи, контроллер 9 тормоза и контроллер 10 рулевого управления сообщают блоку 5 арбитража запросов информацию, указывающую наблюдаемые значения выходных сигналов соответствующих актуаторов 12a-12d, которые должны управляться, и информацию, характерную для соответствующих актуаторов 12a-12d. Когда контроллер 8 силовой цепи, контроллер 9 тормоза и контроллер 10 рулевого управления обнаруживают, что соответствующие актуаторы 12a-12d, которые должны управляться, являются неисправными, контроллер 8 силовой цепи, контроллер 9 тормоза и контроллер 10 рулевого управления сообщают блоку 5 арбитража запросов информацию, указывающую доступность соответствующих актуаторов 12a-12d, которые должны управляться. Информация, относящаяся к рабочим состояниям соответствующих актуаторов 12a-12d, дополнительно сообщается из блока 5 арбитража запросов соответствующим блокам 1a-1c, запрашивающим применение. Блоки 1a-1c, запрашивающие применение, могут изменять или регулировать запрос управления во время исполнения на основе сообщенных рабочих состояний соответствующих актуаторов 12a-12d.
[0029] Как показано на фиг. 2, ECU 20 управления тормозом, который является устройством управления для управления тормозом, включает в себя блок 5 арбитража запросов, блоки 6a-6c формирования запросов и контроллер 7 движения транспортного средства, которые показаны на фиг. 1, в дополнение к контроллеру 9 тормоза. ECU 20 управления тормозом, блоки 1a-1c, запрашивающие применение, контроллер 8 силовой цепи и контроллер 10 рулевого управления могут осуществлять обмен данными друг с другом посредством связи ECU.
<Результаты>
[0030] Конфигурация ECU 20 управления тормозом согласно настоящим вариантам осуществления имеет следующие преимущества.
[0031] Во-первых, ECU 20 управления тормозом включает в себя блок 5 арбитража запроса, так что ECU 20 управления тормозом может управлять запросами, предоставляемыми от блоков 1a-1c, запрашивающих применение, объединенным образом и распределять управляющие величины (команды), необходимые для реализации запрошенного движения транспортного средства, контроллеру 8 силовой цепи, контроллеру 9 тормоза и контроллеру 10 рулевого управления. Как описано выше, конфигурация для управления запросами, принимаемыми от блоков 1a-1c, запрашивающими применение, объединенным образом с помощью блока 5 арбитража запросов имеет преимущество в том, что, даже когда дополнительный блок, запрашивающий применение для реализации другой функции поддержки вождения, добавляется, нет необходимости изменять процесс управления для контроллера 8 силовой цепи, контроллера 9 тормоза и контроллера 10 рулевого управления. ECU 20 управления тормозом может быть установлен на любом типе транспортного средства. Следовательно, устанавливая блок 5 арбитража запросов и блоки 6a-6c формирования запросов на ECU 20 управления тормозом, возможно в любом типе транспортного средства управлять запросами от блоков 1a-1c, запрашивающих применение, для реализации функций поддержки вождения объединенным образом. В случае, когда блок 5 арбитража запросов и блоки 6a-6c формирования запросов предусматриваются в существующем ECU 20 управления тормозом, по сравнению со случаем, когда устройство управления (ECU) для управления запросами от блоков 1a-1c, запрашивающих применение, объединенным образом вновь предоставляется, возможно пресекать увеличение стоимости, требуемой для ECU и системы связи, и увеличение типов ECU и системы связи.
[0032] Когда ECU устанавливаются на транспортном средстве независимо от типа транспортного средства, также существуют ECU (контроллер 8 силовой цепи) для управления силовой цепью и ECU (контроллер 10 рулевого управления) для рулевого управления. Однако, когда связь между множеством ECU прерывается, ECU для рулевого управления не может формировать силу торможения самостоятельно. Кроме того, хотя ECU управления силовой цепью может формировать силу торможения посредством насосной потери, существует ограничение силы торможения, которая может быть сформирована посредством ECU управления силовой цепью, поскольку невозможно использовать фрикционный тормоз. Следовательно, с точки зрения оставления достаточной функции торможения во время неисправности, наиболее предпочтительным является предоставление блока 5 арбитража запросов и блоков 6a-6c формирования запросов в ECU 20 управления тормозом.
[0033] Кроме того, если неисправность возникает в фрагменте сложной системы управления, управление, которое должно выполняться, чтобы гарантировать безопасность, изменяется в зависимости от скорости транспортного средства. Например, если скорость транспортного средства во время возникновения неисправности равна 3 км/ч или менее, предпочтительным является немедленное применение тормоза к транспортному средству и остановка транспортного средства, тогда как если скорость транспортного средства во время возникновения неисправности равна 50 км/ч, требуется постепенно замедлять транспортное средство и затем останавливать транспортное средство. Для того, чтобы надежно обнаруживать скорость транспортного средства, необходим датчик скорости колеса. Измеренное значение датчика скорости колеса непосредственно вводится в ECU 20 управления тормозом через сигнальную линию. Следовательно, с точки зрения выполнения управления для перехода состояния транспортного средства в безопасное состояние в зависимости от скорости транспортного средства, желательно предусматривать блок 5 арбитража запросов и блоки 6a-6c формирования запросов в ECU 20 управления тормозом.
[0034] ECU 20 управления тормозом согласно настоящим вариантам осуществления снабжается FB-контроллером 11, который измеряет значение управляющей записи транспортного средства для использования в управлении с обратной связью. По сравнению со случаем, когда каждая управляющая функция системы поддержки вождения обеспечивается с помощью контроллера, который сообщает по обратной связи значение управляющей записи для продольного (вперед-назад) движения транспортного средства, и контроллера, который сообщает по обратной связи значение управляющей записи поперечного направления (влево-вправо) движения транспортного средства, имеется преимущество в том, что число контроллеров может быть минимизировано. Кроме того, предусматривая FB-контроллер 11 в ECU 20 управления тормозом, возможно уменьшать нагрузку связи, подавляя трафик связи при сообщении по обратной связи значения управляющей записи, измеренного посредством FB-контроллера 11, блокам 1a-1c, запрашивающим применение.
[0035] Для того, чтобы продолжать процесс управления для реализации функций поддержки вождения, блоки 1a-1c, запрашивающие применение, запрашивают информацию о состоянии выполнения запросов, инструктированных актуаторам 12a-12d, и информацию об исправности актуаторов 12a-12d. Блок 5 арбитража запросов суммирует информацию о рабочих состояниях актуаторов 12a-12d, полученную посредством контроллера 8 силовой цепи, контроллера 9 тормоза и контроллера 10 рулевого управления, и сообщает блокам 1a-1c, запрашивающим применение, суммарную информацию. Следовательно, возможно уменьшать нагрузку связи, требуемую для сообщения блокам 1a-1c, запрашивающим применение, информации о рабочих состояниях актуаторов 12a-12d.
[0036] Кроме того, как и в настоящих вариантах осуществления, когда контроллер 7 движения транспортного средства для автономного управления стабильностью движения транспортного средства устанавливается на транспортное средство, предпочтительно устанавливать контроллер 7 движения транспортного средства в ECU 20 управления тормозом. Для того, чтобы предпочтительно использовать актуаторы 12a-12d, в то время как контроллер 7 движения транспортного средства выполняет управление, необходимо сообщать блокам 1a-1c, запрашивающим применение, информацию о доступности актуаторов 12a-12d. В настоящих вариантах осуществления контроллер 7 движения транспортного средства может сообщать информацию блоку 5 арбитража запросов, предусмотренному в том же ECU 20 управления тормозом, с минимальной задержкой. Следовательно, модуль 5 арбитража запросов может управлять информацией, которая должна быть сообщена блокам 1a-1c, запрашивающим применение, объединенным образом.
[0037] Изобретение приспособлено для улучшения доступности устройства управления тормозом, установленного в транспортном средстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ | 2021 |
|
RU2754284C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ УПРАВЛЕНИЯ ТОРМОЗОМ ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2724916C1 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ | 2021 |
|
RU2765067C2 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ | 2019 |
|
RU2742459C2 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2004 |
|
RU2338653C2 |
| СИСТЕМА АВТОНОМНОГО ВОЖДЕНИЯ (ВАРИАНТЫ) | 2018 |
|
RU2707855C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2729868C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2004 |
|
RU2329170C2 |
| РЕАКЦИЯ НА УДАР КАМНЯ О ВЕТРОВОЕ СТЕКЛО | 2018 |
|
RU2684339C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2563307C2 |
Предложено устройство управления для управления тормозом транспортного средства. Устройство управления содержит блок принятия решения, выполненный с возможностью приема запросов, которые используются для управления движением транспортного средства, соответственно от по меньшей мере двух из применений, связанных с функциями поддержки вождения, и принятия решения по принятым запросам. Также устройство управления содержит блок для формирования команд, выполненный с возможностью формирования команды на основе результата принятия решения, полученного посредством блока принятия решения. Также устройство управления содержит блок вывода, выполненный с возможностью вывода запроса вождения на актуатор, установленный на транспортном средстве, на основе команд, формируемых блоком для формирования команд. Достигается всестороннее управление запросами, передаваемыми от множества блоков, запрашивающих применение, которые реализуют функции поддержки вождения. 3 з.п. ф-лы, 2 ил. 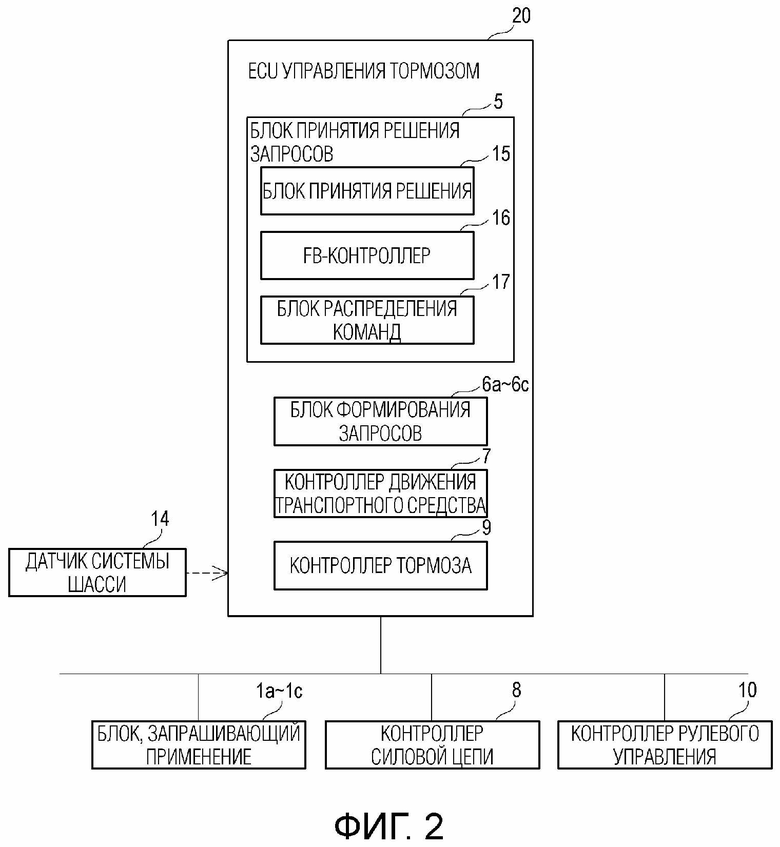
1. Устройство управления для управления тормозом транспортного средства, содержащее:
блок принятия решения, выполненный с возможностью приема запросов, которые используются для управления движением транспортного средства, соответственно от по меньшей мере двух из применений, связанных с функциями поддержки вождения, и принятия решения по принятым запросам;
блок для формирования команд, выполненный с возможностью формирования команды на основе результата принятия решения, полученного посредством блока принятия решения; и
блок вывода, выполненный с возможностью вывода запроса вождения на актуатор, установленный на транспортном средстве, на основе команд, формируемых блоком для формирования команд.
2. Устройство управления по п. 1, в котором запросы, используемые для управления движением транспортного средства, включают в себя по меньшей мере информацию, указывающую продольное движение транспортного средства.
3. Устройство управления по п. 1, в котором запросы, используемые для управления движением транспортного средства, включают в себя по меньшей мере продольное ускорение.
4. Устройство управления по п. 1, в котором блок вывода выполнен с возможностью вывода запросов вождения на множество актуаторов, установленных на транспортном средстве, соответственно.
| ИНТЕГРИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2004 |
|
RU2329170C2 |
| US 2015057883 A1, 26.02.2015 | |||
| WO 2015124381 A1, 27.08.2015. | |||

