Уровень техники
[0001] Ветровые или лобовые стекла транспортного средства предусматривают обращенное вперед, по существу, прозрачное смотровое оконное стекло, чтобы предоставлять возможность переднего обзора пассажирами и/или посредством некоторых датчиков управления транспортного средства. Ветровые стекла также формируют часть структуры транспортного средства. Повреждение ветрового стекла транспортного средства может создавать трещину или трещины в ветровом стекле, которые могут нарушать структурную целостность транспортного средства, рабочую характеристику системы управления автономного транспортного средства и передний обзор пассажирами транспортного средства.
Сущность изобретения
В одном варианте осуществления изобретения обеспечено вычислительное устройство, запрограммированное: идентифицировать удар о ветровое стекло транспортного средства как удар камня на основе данных от датчика давления в ветровом стекле; и после идентификации удара камня идентифицировать какой-либо большой грузовой автомобиль, расположенный в пределах предварительно определенного радиуса от транспортного средства, и активировать транспортное средство, чтобы выполнять маневр уклонения.
В дополнительном варианте осуществления изобретения обеспечено вычислительное устройство, в котором маневр уклонения включает в себя одно из обгона большого грузового автомобиля и увеличения расстояния между большим грузовым автомобилем и транспортным средством.
В дополнительном варианте осуществления изобретения обеспечено вычислительное устройство, в котором маневр уклонения является обгоном большого грузового автомобиля, и вычислительное устройство дополнительно программируется, чтобы распылять стеклоомывающую жидкость на ветровое стекло во время маневра уклонения.
В дополнительном варианте осуществления изобретения обеспечено вычислительное устройство, дополнительно запрограммированное, чтобы доставлять отчет об ударе человеку, взаимодействующему с транспортным средством.
В дополнительном варианте осуществления изобретения обеспечено вычислительное устройство, дополнительно запрограммированное, чтобы передавать предупреждение, легко очевидное пассажиру транспортного средства, что ветровое стекло может быть повреждено.
В дополнительном варианте осуществления изобретения обеспечено вычислительное устройство, дополнительно запрограммированное, чтобы прекращать предупреждение в ответ на входные данные от технического специалиста по обслуживанию об одном из того, что ветровое стекло было осмотрено и подтверждено как неповрежденное, и какое-либо повреждение, идентифицированное техническим специалистом, было отремонтировано.
В дополнительном варианте осуществления изобретения обеспечено вычислительное устройство, дополнительно запрограммированное, чтобы отправлять сообщение, предупреждающее другие транспортные средства о риске удара камня и местоположении риска, после идентификации удара камня.
В дополнительном варианте осуществления изобретения обеспечено вычислительное устройство, дополнительно запрограммированное, чтобы отправлять сообщение, предупреждающее другие транспортные средства о риске удара камня и местоположении риска удара камня, после идентификации множества ударов камней.
В дополнительном варианте осуществления изобретения обеспечено вычислительное устройство, дополнительно запрограммированное, чтобы, после приема множества сообщений об ударе камня от других транспортных средств, идентифицирующих риск удара камня и местоположение удара камня, выбирать новый маршрут вдали от местоположения риска удара камня.
В дополнительном варианте осуществления изобретения обеспечено вычислительное устройство, дополнительно запрограммированное, чтобы обнаруживать аномалии ветрового стекла с помощью данных от камеры, содержащей датчик автономного транспортного средства.
В еще одном варианте осуществления настоящего изобретения обеспечен способ определения и реагирования на удар камня о ветровое стекло, причем способ содержит этапы, на которых: предоставляют транспортное средство, имеющее ветровое стекло, включающее в себя встроенный датчик давления; и идентифицируют удар о ветровое стекло как удар камня на основе данных от датчика давления; в ответ на идентификацию удара камня идентифицируют какой-либо большой грузовой автомобиль, расположенный в пределах предварительно определенного радиуса от транспортного средства; и в ответ на идентификацию большого грузового автомобиля инструктируют транспортному средству выполнять маневр уклонения.
В дополнительном варианте осуществления изобретения обеспечено способ, в котором маневр уклонения включает в себя одно из обгона большого грузового автомобиля и увеличения расстояния между большим грузовым автомобилем и транспортным средством.
В дополнительном варианте осуществления изобретения обеспечено способ, в котором маневр уклонения является обгоном большого грузового автомобиля, и способ дополнительно содержит этап распыления стеклоомывающей жидкости на ветровое стекло во время маневра уклонения.
В дополнительном варианте осуществления изобретения обеспечено способ, дополнительно содержащий этап, на котором предоставляют отчет об ударе человеку, взаимодействующему с транспортным средством.
В дополнительном варианте осуществления изобретения обеспечено способ, дополнительно содержащий этапы, на которых:
человек, взаимодействующий с транспортным средством, осматривает повреждение ветрового стекла; и
если человек находит повреждение ветрового стекла, человек ремонтирует повреждение.
В дополнительном варианте осуществления изобретения обеспечено способ, дополнительно содержащий этап, на котором отправляют сообщение, предупреждающее другие транспортные средства о риске удара камня и местоположении риска после идентификации удара камня.
В дополнительном варианте осуществления изобретения обеспечено способ, дополнительно содержащий этап, на котором отправляют сообщение, предупреждающее другие транспортные средства о риске удара камня и местоположении риска удара камня после идентификации множества ударов камней.
В дополнительном варианте осуществления изобретения обеспечено способ, дополнительно содержащий этап, на котором выбирают новый маршрут вдали от местоположения риска удара камня после приема множества сообщений об ударах камней от других транспортных средств, идентифицирующих местоположение риска удара камня.
В дополнительном варианте осуществления изобретения обеспечено способ, дополнительно содержащий этап, на котором обнаруживают аномалии ветрового стекла с помощью данных от камеры, содержащей датчик автономного транспортного средства.
В дополнительном варианте осуществления изобретения обеспечено способ, дополнительно содержащий этап, на котором паркуют транспортное средство в области не под прямым солнечным светом после идентификации удара как удара камня.
Краткое описание чертежей
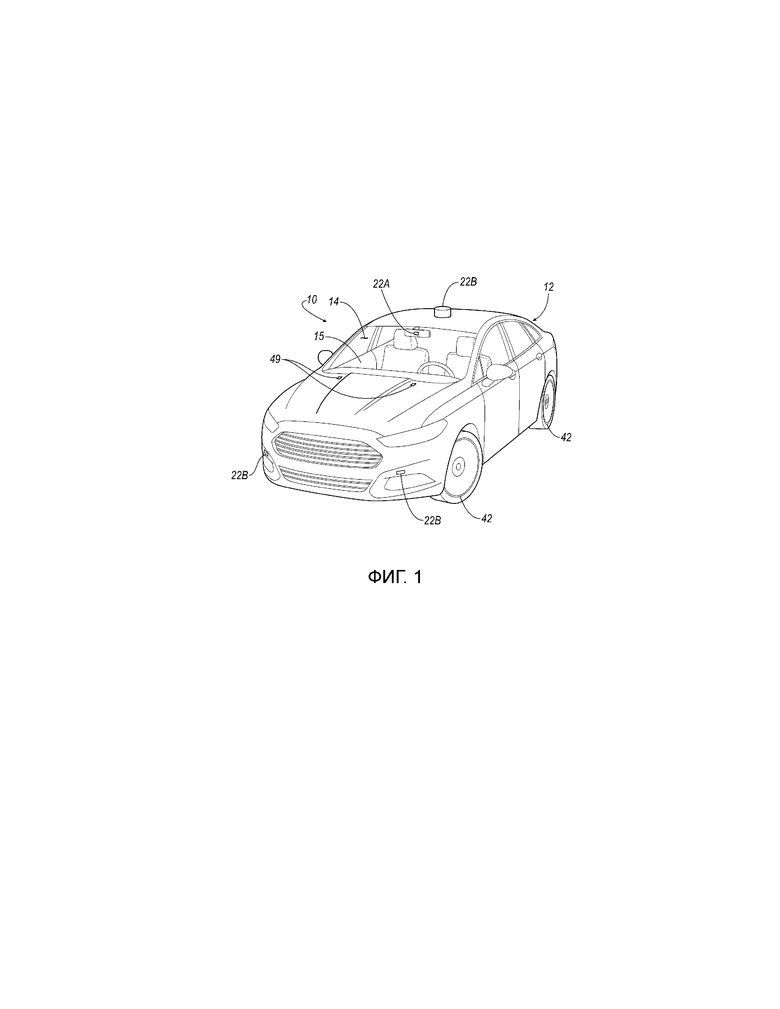
[0002] Фиг. 1 - это вид в перспективе примерного автономного транспортного средства, имеющего модуль датчика, установленный в нем.
[0003] Фиг. 2 - это вид спереди примерного ветрового стекла, включающего в себя примерные пьезоэлектрические датчики.
[0004] Фиг. 3 - это примерная блок-схема автономного транспортного средства на фиг. 1, включающего в себя датчики и контроллер.
[0005] Фиг. 4A, 4B, 4C и 4D - это иллюстрации четырех примерных типов повреждения ветрового стекла от ударов камней.
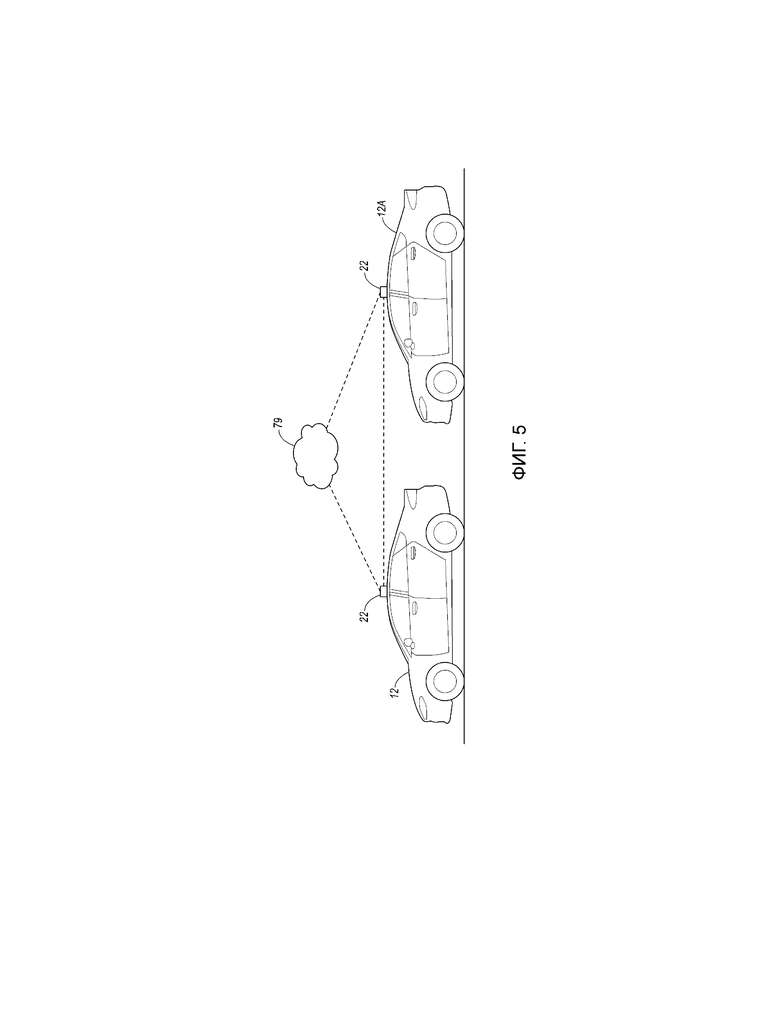
[0006] Фиг. 5 - это схематичная иллюстрация примерной системы связи транспортного средства.
[0007] Фиг. 6A - это схематичная иллюстрация первого автономного транспортного средства, следующего позади примерного самосвала с гравием на первом расстоянии, и за которым следует второе автономное транспортное средство.
[0008] Фиг. 6B - это схематичная иллюстрация автономных транспортных средств на фиг. 6A в первой позиции уклонения.
[0009] Фиг. 6C - это схематичная иллюстрация автономных транспортных средств на фиг. 6A и 6B во второй позиции уклонения.
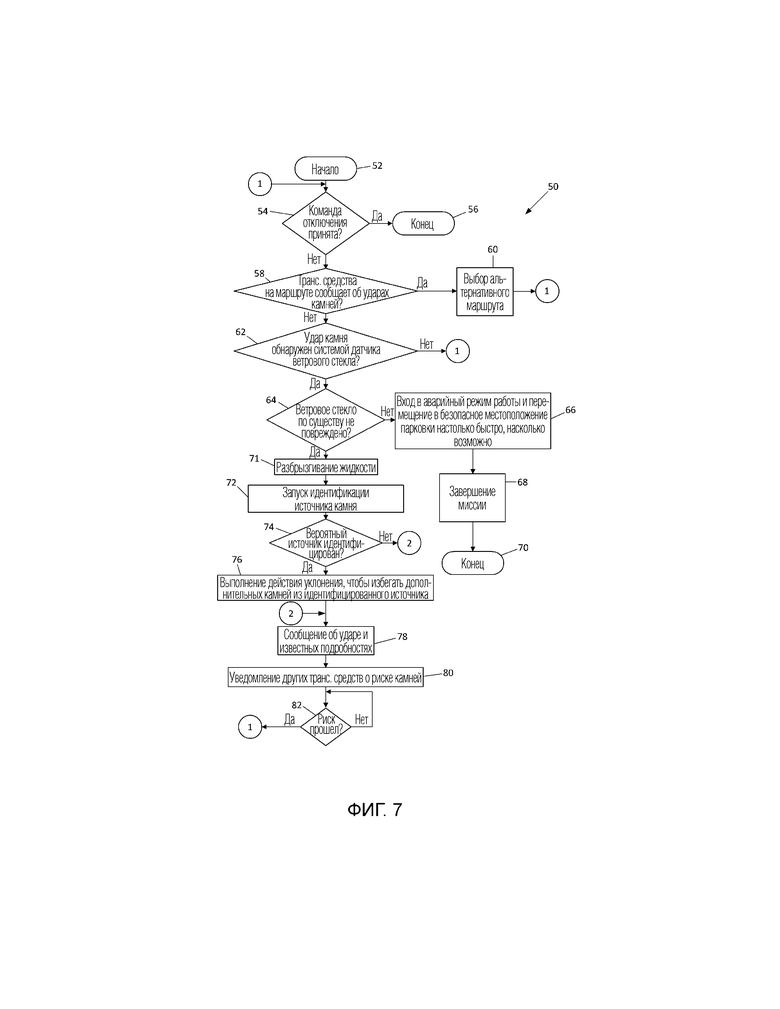
[0010] Фиг. 7 - это примерная блок-схема последовательности операций процесса, выполняемого посредством системы ветрового стекла.
Подробное описание изобретения
Введение
[0011] Транспортное средство включает в себя ветровое стекло, имеющее встроенный датчик давления. Сигнал от датчика давления используется, чтобы идентифицировать удар о ветровое стекло как удар камня. В ответ на идентификацию удара камня компьютер транспортного средства программируется, чтобы идентифицировать любой большой грузовой автомобиль, находящийся в пределах предварительно определенного радиуса от транспортного средства. В ответ на идентификацию большого грузового автомобиля транспортное средство инструктируется, чтобы выполнять маневр уклонения, чтобы избегать камней, роняемых или выбрасываемых большим грузовым автомобилем. Транспортное средство может быть так называемым автономным транспортным средством и может перевозить или может не перевозить пассажиров-людей.
[0012] Относительные ориентации и направления (в качестве примера, верхнее, нижнее, низ, переднее, заднее, перед, зад, обратное, снаружи, внутри, внутрь, наружу, поперечное, левое, правое) излагаются в этом описании не как ограничения, а для удобства читателя в изображении по меньшей мере одного варианта осуществления описываемых структур. Такие примерные ориентации представлены с точки зрения пассажира, сидящего на водительском месте, обращенного к приборной панели. На чертежах аналогичные номера указывают аналогичные части на всем протяжении нескольких видов.
Примерные элементы системы
[0013] Со ссылкой на фиг. 1-3, система 10 реакции на удар камня о ветровое стекло для примерного транспортного средства 12 включает в себя примерное ветровое стекло 14, способное обнаруживать удары, включающие в себя удары камней. Фиг. 4A, 4B, 4C и 4D иллюстрируют четыре различных типа повреждения ветрового стекла, которое может возникать, когда камень ударяет о ветровое стекло транспортного средства. Ветровое стекло 14 защищает пассажиров транспортного средства, сидящих в пассажирском салоне 15, расположенном за ветровым стеклом, от встречного воздуха и летящих объектов, включающих в себя в качестве примера дорожные обломки и насекомых. Ветровое стекло 14 также служит в качестве структурного элемента, препятствующего деформации, и/или проникновению объектов внутрь, пассажирского салона 15 в случае аварии.
[0014] Быстрое обслуживание сколов 16A, 16B, 16C и 16D (совокупно 16) ветрового стекла от камней, таких как иллюстрированные на фиг. 4A, 4B, 4C и 4D, соответственно, может предоставлять возможность продолжать эксплуатировать ветровое стекло 14 в транспортном средстве 12. Невозможность быстро обслуживать такое повреждение может приводить в результате к тому, что скол становится трещиной в стекле, которая может нарушать структурную целостность транспортного средства 12. Коммерчески доступные услуги по ремонту ветрового стекла и продукты могут быть использованы, чтобы препятствовать тому, что сколы 16 от ударов камней становятся трещиной. Однако время между возникновением скола 16 и его трансформацией или распространением в непригодную для ремонта трещину, требующую замены ветрового стекла, может быть коротким. Переменные величины, влияющие на такую трансформацию и распространение, включают в себя тип возникшего скола и последующие механические напряжения и деформации на ветровом стекле 14. Механические напряжения и деформации на ветровом стекле 14 могут включать в себя напряжения и деформации вследствие колебаний температуры, и особенно увеличений температуры, и напряжения и деформации вследствие структурных входных нагрузок, которые могут возникать за счет движения транспортного средства 12 по неровным дорогам.
[0015] Ветровое стекло 14, лучше всего видно на фиг. 2, включает в себя примерный встроенный в ветровое стекло датчик 17 удара, который охватывает по существу все ветровое стекло 14. Датчик 17 удара может быть датчиком давления, определяющим давление на ветровое стекло 14. Датчик 17 может включать в себя совокупность из одного или более дискретных датчиков, таких как, в качестве примера, множество тонкопленочных пьезоэлектрических датчиков 18. Ветровое стекло 14 может быть известной многослойной структурой с датчиком 17, размещенным между слоями окна, при этом один слой является стеклянной панелью. Датчики 18 могут заканчиваться на соединителях 19, которые могут протягиваться из многослойной структуры. В то время как иллюстрируется множество непрозрачных датчиков 18, прозрачные пленочные датчики известны и могут альтернативно быть использованы.
[0016] Транспортное средство 12 является автономным транспортным средством (как этот термин определяется ниже), имеющим систему 20 управления, которая может включать в себя множество датчиков и множество актуаторов, соединенных с вычислительным устройством, например, в форме электронного блока управления ("ECU") 21. Система 20 управления может включать в себя систему 10 реакции на удар камня о ветровое стекло, которая может взаимно включать в себя компоненты и компьютерные инструкции системы 20 управления. ECU 21 может состоять из единого вычислительного устройства или компьютера, как подсказывается посредством фиг. 3, или может альтернативно сдержать множество компьютеров (например, множество ECU), включающих в себя, например, компьютер силовой цепи, сам потенциально содержащий компьютер двигателя и компьютер коробки передач, компьютер информационно-развлекательной системы, компьютер системы шасси, компьютер системы устройств пассивной безопасности, компьютер безопасности транспортного средства и т.п.
[0017] Система 20 управления может включать в себя множество датчиков осведомленности об обстановке транспортного средства или датчиков автономного транспортного средства ("AV-датчиков") 22. AV-датчики 22 могут быть установлены внутри пассажирского салона транспортного средства ("внутренние AV-датчики") 22A, например, за ветровым стеклом 14, и могут альтернативно быть установлены снаружи транспортного средства ("внешние AV-датчики") 22B, например, на крыше 24 транспортного средства или в передней части транспортного средства. Предпочтительное местоположение может зависеть от типа датчика. Идентификация нескольких примерных типов датчиков, которые могут быть использованы, предоставляется ниже.
[0018] ECU 21 включает в себя электронный процессор 26 и ассоциированную память 28. Система 20 может дополнительно включать в себя сеть 30 транспортного средства, включающую в себя одну или более проводных и/или беспроводных сред передачи данных, таких как примерная системная шина локальной сети контроллеров ("CAN") или локальная соединительная сеть ("LIN") или другой интерфейс связи. Сеть 30 предоставляет среду передачи данных между и соединяющую элементы системы 20 управления, включающей в себя ECU 21 и компоненты, и вспомогательные системы, включающие в себя, в качестве примера, приводной мотор 32, датчики 34 мотора, множество тормозных блоков 36, датчики 38 тормоза, датчики 40 скорости колес, ассоциированные с колесами 42, актуатор 44 системы рулевого управления, датчики 46 системы рулевого управления, датчики 48 пассажиров, датчик 17 удара о ветровое стекло, систему 47 распыления стеклоомывающей жидкости, сигналы поворота (не показаны) и/или датчики 22 осведомленности об обстановке транспортного средства.
[0019] Транспортное средство 12 включает в себя четыре колеса 42, каждое из которых может включать в себя шину. Каждое из колес 42 может быть ассоциировано с одним из тормозных блоков 36. Датчики 40 скорости колес могут быть встроены в тормозные блоки 36. Актуатор 44 системы рулевого управления и ассоциированные датчики рулевого управления включены в систему рулевого управления транспортного средства 12. Мотор 32 может, в качестве примера, быть двигателем внутреннего сгорания или электромотором или их сочетанием, т.е. транспортное средство 12 может включать в себя так называемую гибридную силовую цепь. Мотор 32 может или не может включать в себя или быть соединен с трансмиссией, предоставляющей крутящий момент и передаточные отношения. Мотор 32 может быть единым блоком рядом с передней частью транспортного средства 12, или мотор 32 может альтернативно быть расположен где-нибудь еще в транспортном средстве 12. Мотор 32 может альтернативно быть предоставлен в форме множества электромоторов, ассоциированных с множеством колес 42. Полноприводное транспортное средство может иметь мотор 32, ассоциированный с каждым колесом 42. Система 47 распылителя стеклоомывающей жидкости может также быть расположена в транспортном средстве 12. Примерная система 47 распылителя жидкости для ветрового стекла может включать в себя жидкостный насос, расширительный бачок и одну или более примерных распыляющих форсунок 49. Примерные распыляющие форсунки 49 могут быть расположены в местоположениях и ориентациях, предоставляющих возможность выборочного распыления жидкости для ветрового стекла по ветровому стеклу 14.
[0020] Каждый из приводного мотора 32, тормозных блоков 36, системы 47 распылителя жидкости для ветрового стекла и актуатора 44 системы рулевого управления иллюстрируются как соединенные непосредственно с ECU 21 через сеть 30, но могут альтернативно или дополнительно быть соединены непосредственно с ECU 21. Каждый из приводного мотора 32, тормозных блоков 36 и актуатора 44 системы рулевого управления может включать в себя соответствующий электронный контроллер, который принимает инструкции от ECU 21.
[0021] Память 28 ECU 21 включает в себя одну или более форм компьютерно-читаемых носителей и хранит инструкции, исполняемые процессором 26 для выполнения различных операций, включающих в себя такие операции, которые описываются в данном документе. Процессор 26 может считывать и выполнять такие инструкции. ECU 21 включает в себя программирование, чтобы автономно управлять автономным транспортным средством 12 в полностью автономном режиме.
[0022] В целях этого описания выражение "автономное транспортное средство" используется, чтобы ссылаться на транспортное средство, работающее в полностью автономном режиме. Полностью автономный режим определяется как режим, в котором каждая из системы движения транспортного средства 12 (типично через силовую цепь, включающую в себя мотор 32, как определено в данном документе), тормозной системы и системы рулевого управления управляются посредством ECU 21 по существу при всех обстоятельствах. В полуавтономном режиме одна или две из них управляются посредством ECU 21, а в неавтономном режиме ни одна из них.
[0023] Автономные транспортные средства могут быть дополнительно улучшены с помощью функциональных возможностей связи между транспортными средствами и функциональных возможностей связи между транспортным средством и инфраструктурой и инфраструктурой и транспортным средством. Функциональные возможности связи между транспортными средствами предоставляют возможность транспортному средству связываться с другими транспортными средствами и корректировать интервал транспортного средства соответствующим образом в предвидении, например, предстоящих проблем движения транспорта. Функциональные возможности связи между транспортным средством и инфраструктурой и инфраструктурой и транспортным средством предоставляют возможность интерактивным устройствам инфраструктуры, таким как контроллер перекрестка (не показан), связываться с транспортными средствами 12. Например, транспортное средство 12 может быть предупреждено о приближающемся изменении сигнала светофора на перекрестке, требующего изменения скорости. Для этого описания функциональные возможности связи между транспортными средствами и функциональные возможности связи между транспортным средством и инфраструктурой и инфраструктурой и транспортным средством совокупно идентифицируются как "функциональные возможности V2V-связи".
[0024] Функциональные возможности V2V-связи являются отличительными признаками транспортных средств, оборудованных координированной адаптивной системой автоматического поддержания скорости движения ("CACC"), или CACC-транспортных средств. Ссылки на CACC в этом описании включают в себя функциональные возможности V2V-связи. В обычных CACC-транспортных средствах системы движения и торможения, но не рулевого управления, управляются посредством ECU 21. В автономных CACC-транспортных средствах каждая из системы движения, торможения и рулевого управления управляется посредством ECU 21. В целях этого описания все CACC-транспортные средства являются автономными CACC-транспортными средствами. HeCACC-транспортное средство включает в себя любое транспортное средство, в котором отсутствуют функциональные возможности V2V-связи. Неавтономное транспортное средство без адаптивной системы автоматического поддержания скорости, которое находится исключительно под управлением водителя-человека, является примерным HeCACC-транспортным средством.
[0025] Функциональные возможности V2V-связи предоставляют возможность прогнозирования предстоящих замедлений движения транспорта и входящего транспортного потока, что, в свою очередь, предоставляет возможность сглаживать совокупный поток транспорта. Обстоятельства, которые будут приводить в результате к затору или движению транспорта с остановками с управляемыми водителями-людьми или полностью автономными, но иначе несоединенными транспортными средствами, могут под CACC-управлением приводить в результате к относительно плавному замедлению движения транспорта, в то же время поддерживая более высокую совокупную пропускную способность транспортных средств.
[0026] Автономные CACC-транспортные средства могут дублировать изменения скорости идентифицированного едущего впереди транспортного средства и могут также изменять полосы движения, чтобы либо продолжать следовать за одним и тем же транспортным средством, либо следовать за замещающим едущим впереди транспортным средством.
[0027] Память 28 ECU 21 также хранит данные. Данные могут включать в себя собранные данные, которые собираются от множества устройств. В целом, собранные данные могут включать в себя любые данные из картографической базы данных и любые данные, которые могут быть собраны посредством любого устройства сбора данных, включающего в себя датчики 34 мотора, датчики 40 скорости колес, датчики 46 рулевого управления, датчики 48 пассажира, AV-датчики 22, датчик 17 удара и/или данные, вычисленные из таких данных. Примерные датчики 46 рулевого управления могут включать в себя датчик положения рейки и/или датчик поперечного управления. Примерные AV-датчики 22 могут включать в себя датчики контекста и позиции транспортного средства и датчики местоположения, такие как радиолокационный датчик, лидар-датчик, датчик изображения (например, камера), датчик системы глобального позиционирования ("GPS"), антенны и т.п. Радиолокационные датчики могут быть использованы как для определения местоположения других объектов, так и, например, посредством использования эффекта Доплера, определения относительной скорости таких других объектов. Вышеупомянутые примеры не предназначены быть ограничивающими. Другие типы устройств сбора данных могут быть использованы, чтобы предоставлять данные в ECU 21. Данные могут также включать в себя вычисленные данные, вычисленные в ECU 21 из собранных данных и из других вычисленных данных.
[0028] Датчик 17 удара ветрового стекла выдает сигнал напряжения, когда подвергается деформирующей нагрузке. Деформирующая нагрузка может быть свойственной для большого числа причин, включающих в себя, например, изменения температуры, особенно если ветровое стекло имеет коэффициент теплового расширения, отличный от структуры рамки окна, в котором оно установлено, структурную деформацию вследствие столкновения транспортного средства, связанные с погодой удары в ветровое стекло, такие как дождь и град, и удары обломков о ветровое стекло, такие как удары камней. Сигнатуры сигнала, указывающие тип удара, могут быть разработаны для конкретного датчика 17, применяемого в ветровом стекле. Дополнительно, датчик 17 может быть сконфигурирован, чтобы идентифицировать местоположение таких ударов на ветровом стекле.
[0029] Одна примерная конфигурация для датчика 17, предоставляющего возможность идентификации местоположения удара, является конфигурацией в виде сетки, с первым множеством датчиков 18, ориентированных горизонтально, и вторым множеством датчиков 18, ориентированных вертикально (не показано) в окне. Еще одна примерная компоновка датчиков 18 иллюстрируется в патенте США № 7,475,587, включенном в данный документ по ссылке в своей полноте, с датчиками 18 прямоугольной формы, размещенными в треугольной структуре на ветровом стекле.
[0030] Датчик 17 может быть соединен с сетью 30 транспортного средства через соединители 19. Альтернативно, соединители 19 могут соединяться непосредственно с ECU 21 или вспомогательным контроллером (не показан), расположенным между ECU 21 и датчиком 17. Конфигурация соединителя 19 может зависеть от конструкции датчика 17 и природы соединения с ECU 21. Например, если датчик 17 использует единственную цельную пленку, каждый соединитель 19 может предусматривать единственную клемму для соединения с ECU 21. Если датчик 17 включает в себя множество датчиков 18, тогда соединители 19 могут включать в себя множество клемм для соединения с ECU 21, чтобы предоставлять возможность повышенной функциональности, такой как не только, определение удара камня, и местоположение на ветровом стекле, где такой удар случился.
[0031] ECU 21 может быть запрограммирован, чтобы идентифицировать случай удара камня на основе обнаружения сигнала или сигналов напряжения от датчика 17 конкретной величины и продолжительности. Способ или процесс 50 для транспортного средства 12, чтобы реагировать на удар камня, описывается ниже. ECU 21 может быть дополнительно запрограммирован, чтобы перемещать транспортное средство 12 в безопасное местоположение, и может также быть запрограммирован, чтобы распылять стеклоомывающую жидкость на ветровое стекло 14 в ответ на выявленный риск ударов камней.
Обработка
[0032] Фиг. 7 иллюстрирует процесс 50 реакции на удар камня, который может быть сохранен в ECU 21 транспортного средства 12. ECU 21 выполняет этапы, иллюстрированные на фиг. 7, как описано ниже. Компьютерная программа для выполнения обработки 50 может быть реализована на этапе 52 начала, например, когда выдается команда запуска, которая может быть ассоциирована с запуском транспортного средства в ответ на приближение или касание пассажиром транспортного средства.
[0033] Далее, этап 54 принятия решения определяет, когда была принята команда отключения. Команда отключения может приходить от водителя транспортного средства и от контроллера питания, например, модуля управления кузовом, или поворота ключа между позицией ВКЛ. и ВЫКЛ. Такие команды могут также приходить из беспроводной сети в случае автономных транспортных средств. Когда команда отключения была подтверждена как принятая, процесс 50 переходит к этапу 56 окончания и завершается. Когда прием команды отключения не принят, процесс 50 переходит к этапу 58 принятия решения.
[0034] Этап 58 принятия решения определяет, сообщают ли транспортные средства на выбранном маршруте транспортного средства 12 об инцидентах ударов камней. Такие отчеты могут быть выполнены через V2V-связь или через любую альтернативную сеть связи между транспортными средствами. Когда такие отчеты принимаются, транспортное средство 12 может переходить к этапу 60 обработки, который выбирает альтернативный маршрут. Такой выбор альтернативного маршрута может учитывать факторы, такие как штрафное время для выбора альтернативного маршрута относительно маршрута с риском удара камня и риск камней на альтернативном маршруте. Из этапа 60 обработки процесс 50 возвращается к этапу 54 принятия решения. Когда транспортные средства, движущиеся впереди, не сообщают об ударах камней, процесс 50 переходит к этапу 62 принятия решения.
[0035] Этап 62 принятия решения определяет, было ли ветровое стекло 14 ударено камнем. Такое определение может учитывать несколько факторов, включающих в себя, например, величину удара, профиль графика усилия относительно временной зависимости для удара, частоту ударов и анализ повреждения от удара. Рассмотрение величины удара и профиля может включать в себя сравнение данных датчика от удара, включающих в себя величину и профиль данных об ударе, относительно примерной библиотеки сохраненных категоризированных значений данных для величины и профиля. Библиотека значений данных может включать в себя репрезентативные значения для управляемых ударов о ветровое стекло, сформированные в лабораторной установке, использующей репрезентативное ветровое стекло 14 и поддерживающую структуру. Библиотечные значения данных могут включать в себя удары множеством объектов, которые вероятно должны ударять о ветровое стекло, включающих в себя камни или заменители камней, такие как стальные шарики. Такие данные могут изменять параметры удара управляемым образом. Параметры удара могут включать в себя матрицу переменных удара, включающую в себя тип объекта, массу объекта, скорость объекта, угол удара и местоположение удара на ветровом стекле 14. В ответ на удар данные датчика ветрового стекла могут быть сравнены с сохраненной библиотекой профилей удара, чтобы идентифицировать потенциальный удар камня.
[0036] В дополнение к параметрам удара, упомянутым выше, величины и профили выходного сигнала датчика 18 зависят от большого числа переменных, относящихся к структуре ветрового стекла, ее установке в транспортном средстве 12 и типам и местоположениям датчиков 18. Разновидности ветрового стекла 14 могут включать в себя суммарную толщину ветрового стекла, многослойную структуру ветрового стекла, включающую в себя толщину индивидуальных слоев и число слоев и типы материала каждого слоя. Разновидности установочной структуры ветрового стекла могут включать в себя жесткость вертикальных стоек кузова, жесткость поперечных элементов рамы окна транспортного средства и толщину и жесткость уплотнений между стеклом и рамой. Разновидности датчиков могут включать в себя тип и местоположение датчиков 18, как обсуждалось выше. Объединенные переменные взаимодействия объекта/ветрового стекла могут включать в себя местоположение удара на ветровом стекле 14, угол удара относительно ветрового стекла и направление удара на стекле относительно направления ветрового стекла 14. Эти переменные могут быть адресованы с помощью лабораторного испытания, как описано выше, чтобы формировать библиотеку величин и профилей и с помощью компьютерных имитационных моделей задуманный проект ветрового стекла и ассоциированную с ним установочную структуру.
[0037] В качестве альтернативы, или в дополнение к, принятию во внимание библиотеки значений данных, дополнительно возможно устанавливать простую математическую модель ударов камней в форме уравнения, которое предоставляет возможность распознавания удара камня о ветровое стекло как такового. Одна примерная модель предоставляется посредством порогового значения давления для идентификации удара камня. Удар, вызывающий значение сигнала давления выше порогового значения, является ударом камня. Удар, вызывающий значение сигнала давления ниже порогового значения, не является ударом камня и может быть, например, ударом насекомого или ударом капли дождя. Для заданного ветрового стекла удар, создающий сигнал, превышающий пороговое значение, может быть обработан как удар камня.
[0038] Следом за ударом, включающим в себя неоднозначный удар, близкий к пороговому значению давления, т.е. в предварительно определенном диапазоне, окружающем пороговое значение давления, ветровое стекло 14 может быть просканировано камерой, служащей в качестве одного из датчиков 22A. Данные от камеры могут быть использованы процессором 26, чтобы идентифицировать аномалии в ветровом стекле 14, иначе называемые аномалиями ветрового стекла, как возможные местоположения сколов в ветровом стекле 14. В то время как некоторые такие аномалии могут быть насекомыми или дорожными обломками, включающими в себя грязь и гудрон, идентификация местоположений таких аномалий может быть полезна в определении местоположений сколов. В качестве дополнительного этапа в идентификации аномалии в качестве скола от камня стеклоомывающая жидкость может быть распылена из форсунки 49 на ветровое стекло 14, и щетка стеклоочистителя активирована в попытке очищать аномалию с ветрового стекла. Когда аномалия не очищается, аномалия обрабатывается как скол от камня.
[0039] Камни, в целях этого описания, включают в себя лед. При температурах ниже точки замерзания воды кристаллизовавшаяся вода, т.е. лед, является минералом и, таким образом, камнем. Лед, включающий в себя, например, лед, падающий или сбрасываемый с крыши большого грузового автомобиля, может представлять те же риски, что и представляемые другими камней. Соответственно, процессор 26 может быть запрограммирован, чтобы распознавать удары льда как удары камня. В то время как является формой льда, град может быть отличен от других ударов камней процессором 26 из камней на основе частоты ударов. Относительно высокая частота ударов, т.е. большое число ударов, например, десять или больше ударов, в коротком периоде времени, например, более одного удара в секунду, может быть указателем погодного явления, такого как град, вместо удара или ударов отдельным камнем или камнями. В целях этого описания удары града, когда распознаются как таковые, не являются ударами камней. Удары града не распознаются как удары камней, поскольку может не быть допустимого маневра вождения, который предоставит возможность транспортному средству 12 избегать града. Когда определяется, что не было удара камня, который был обнаружен, процесс 50 циклически возвращается обратно к этапу 54 принятия решения. Когда определяется, что удар камня был обнаружен, процесс 50 может переходить к этапу 64 принятия решения.
[0040] Этап 64 принятия решения определяет, остается ли ветровое стекло 14 по существу нетронутым. Примеры ветровых стекол 14, которые больше не являются по существу нетронутыми, включают в себя ветровое стекло с отверстием, которое протягивается полностью сквозь все слои многослойной структуры ветрового стекла, и ветровое стекло, которое имеет перекрывающиеся трещины сквозь множество слоев многослойной структуры стекла. Это может быть определено посредством сравнения величины и профиля удара с величиной и профилем эталонного или библиотечного удара, который разбил или пробил аналогичное или идентичное ветровое стекло. Альтернативные указания разбитого ветрового стекла могут включать в себя то, что некоторые датчики 18 становятся недоступными для ECU 21. Такая недоступность может быть интерпретирована как разрыв поверхности стекла. Альтернативно, если данные от датчика 17 указывают, что верхнее ограничение предельной прочности стекла было превышено, тогда процессор 26 может делать вывод, что ветровое стекло 14 было разбито. Еще более альтернативно, если данные от одного из датчиков 22A внутри салона 15, такого как камера, указывают трещину или множество трещин, тогда процессор 26 может делать вывод, что ветровое стекло 14 было разбито.
[0041] Когда этап 64 принятия решения определяет, что ветровое стекло 14 является по существу нетронутым, тогда процесс 50 переходит к этапу 66 обработки, который инструктирует транспортному средству 12 входить в аварийный режим работы. Аварийный режим работы может включать в себя перемещение транспортного средства 12 к безопасному местоположению парковки настолько быстро, насколько безопасно возможно. Безопасное местоположение парковки может быть обочиной дороги. Аварийный режим работы может также включать в себя уведомление первого реагирующего элемента о возможных повреждениях и уведомление диспетчерской службы о том, что транспортное средство 12 было подвергнуто риску и может нуждаться в буксировке. После того как транспортное средство 12 выполнило какие-либо мероприятия, проинструктированные посредством этапа 66 обработки, процесс 50 может перемещаться к этапу 68 обработки, чтобы завершать текущую миссию транспортного средства. Следом за таким завершением миссии процесс 50 может перемещаться к этапу 70 окончания и завершаться.
[0042] Когда этап 64 принятия решения определяет, что ветровое стекло остается нетронутым, процесс 50 может перемещаться к этапу 71 обработки. Этап 71 обработки инструктирует системе 47 распылителя стеклоомывающей жидкости распылять стеклоомывающую жидкость через форсунку или форсунки 49 на ветровое стекло 14. Стеклоомывающая жидкость может включать в себя мыло или другие добавки, которые, вместе с объемом жидкости, действуют как смазка между какими-либо дополнительными камнями, которые могут ударять ветровое стекло 14, и ветровым стеклом. Такое распыление может поддерживаться, пока существует продолжающийся воспринимаемый риск удара камня, например, когда транспортное средство 12 находится позади или обгоняет возможный источник камней, например, самосвал 75 с гравием.
[0043] От этапа 71 процесс 50 может переходить к этапу 72 обработки, чтобы выполнять идентификацию источника камня. Идентификация источника камня может использовать один или более AV-датчиков 22. ECU 21 может анализировать данные, доступные от датчиков 22, чтобы оценивать, существуют ли какие-либо большие грузовые автомобили впереди транспортного средства 12, которые могут сбрасывать камень из площади грузового пространства транспортного средства или отбрасывать камень с одной из своих шин. ECU 21 может сохранять данные от датчиков в течение периода времени, при этом такие данные непрерывно обновляются. Удар может инициировать ECU, чтобы регистрировать все доступные сохраненные данные.
[0044] Термин "большой грузовой автомобиль" ассоциируется с весом, массой и/или габаритами, которые могут быть сохранены в памяти ECU 21, и которые могут, таким образом, быть изменены. В одном примере "большой грузовой автомобиль" означает коммерческие грузовые автомобили, имеющие полный вес транспортного средства, оцениваемый в 10000 фунтов или более. Кроме того, ECU 21 может быть запрограммирован, чтобы распознавать другие транспортные средства, например, фургоны, большие седаны и т.д., как представители "большого грузового автомобиля" в контексте этого описания.
[0045] Поскольку ECU 21 не способен взвешивать другие транспортные средства, ECU 21 может быть запрограммирован, чтобы распознавать размер в качестве показателя веса. Например, ECU 21 способен использовать данные от датчиков, чтобы оценивать расстояние от транспортного средства 12 до транспортных средств на линии прямой видимости. Оценки расстояния, вместе с изображениями транспортных средств в пределах поля обзора датчиков 22, предоставляют возможность оценки размера таких транспортных средств. ECU 21 может быть запрограммирован, чтобы распознавать любое транспортное средство, превышающее 20 футов длиной, в качестве большого грузового автомобиля. Альтернативный визуально различимый параметр, такой как высота транспортного средства или ширина, может быть использован вместо этого, поскольку высота и ширина более легко различаются, когда целевое транспортное средство находится непосредственно перед транспортным средством 12. Примерная высота цели может составлять восемь футов, а примерная ширина может составлять семь футов. Или еще дополнительно альтернативно, сочетание какой-либо комбинации длины и ширины и высоты может быть нацелено на различение большого грузового автомобиля. После идентификации, местоположение большого грузового автомобиля может быть определено посредством ECU 21. Определение местоположение грузового автомобиля может включать в себя определение его позиции и направления движения относительно транспортного средства 12. Большие грузовые автомобили, движущиеся в том же направлении, что и транспортное средство 12, располагаются впереди или рядом с транспортным средством 12, и в пределах предварительно определенного радиуса от транспортного средства 12, примерный предварительно определенный радиус равен 0,25 мили, могут считаться вероятным источником камней. То, как целевые параметры устанавливаются, не является критичным для системы 10. Целевые параметры для идентификации больших транспортных средств могут быть предварительно определены или могут быть изучены ECU 21, если ECU 21 оснащен вычислительным интеллектом.
[0046] Сохраненные данные могут быть проанализированы, чтобы потенциально определять источник ударяющего камня более точно. Например, если точка удара на ветровом стекле может быть определена, может быть возможно определять путь объекта. Такой анализ может также определять, может ли транспортное средство, потенциально швыряющее камень или отбрасывающее камень, альтернативно или дополнительно перевозить неправильно закрепленный груз, который может привести в результате к неприятному удару.
[0047] За этапом 72 обработки может следовать этап 74 принятия решения, который определяет, был ли способен этап 72 обработки идентифицировать вероятный источник задевающего камня. После того как камень идентифицирован, тогда соответствующие характерные для источника реакции, включающие в себя маневры уклонения, могут быть инициированы. Например, если движущееся транспортное средство, такое как большой грузовой автомобиль в форме самосвала 75 с гравием, как иллюстрировано на фиг. 6A, идентифицируется как вероятный источник камней, конкретные реакции могут быть инициированы. Примерная реакция может включать в себя этап 76 обработки, инструктирующий транспортному средству 12 выполнять первый маневр уклонения. Первым маневром уклонения может быть замедление автономного транспортного средства 12, чтобы увеличивать интервал между транспортным средством 12 и большим грузовым автомобилем 75 с D1, как иллюстрировано на фиг. 6A, до D2, как иллюстрировано на фиг. 6B. Транспортное средство 12A позади транспортного средства 12 может быть связано с транспортным средством 12 посредством V2V-связи и может также замедляться, чтобы избегать ударов камней. Дополнительно, или альтернативно, этап 76 обработки может инструктировать транспортному средству 12 выполнять второй маневр уклонения. Вторым маневром уклонения может быть перемещение автономного транспортного средства 12 на свободную полосу движения не за большим грузовым автомобилем 75, как иллюстрировано на фиг. 6C. Следующее транспортное средство 12A может быть связано с транспортным средством 12 посредством V2V-связи и может также менять полосы движения, чтобы избегать ударов камней. При проезде большого грузового автомобиля 75 транспортные средства 12 и 12A могут подвергаться риску дополнительных ударов камней. Соответственно, транспортные средства 12 и 12A могут распылять на свои ветровые стекла стеклоомывающую жидкость во время обгона. Когда вероятный источник не идентифицирован, тогда процесс 50 пропустит этап 76 обработки и перейдет от этапа 74 к этапу 78 обработки.
[0048] В этапе 78, который может следовать за одним из двух этапов 74, 76, транспортное средство 12 может создавать отчет об ударе камня. Отчет может включать в себя информацию о подробностях каждого удара камня, включающую в себя, если доступна, приблизительное местоположение удара и относительную силу удара, тип повреждения ветрового стекла, такое как скол или трещина, и дату и время удара, и может дополнительно включать в себя информацию, такую как текущие рабочие условия транспортного средства, такие как скорость транспортного средства, температура, включающая в себя температуру окружающей среды, и географическое местоположение, где удар произошел. Такой отчет может быть сохранен в ECU 21 для более поздней загрузки, например, в удаленный компьютер. Отчет может также или альтернативно отображать панель информации о состоянии транспортного средства внутри салона 15 в форме предупреждения для просмотра пассажиром транспортного средства, включающую в себя в качестве примера пассажира и технического специалиста по обслуживанию. Такое предупреждение может также или альтернативно быть предоставлено в звуковом формате. Отчет, еще дополнительно альтернативно, может также быть сообщен в облачную сеть 79, включающую в себя, в качестве примера, сеть обслуживания транспортного средства или операционную сеть парка. Отчеты могут мотивировать человека, взаимодействующего с транспортным средством, включающего в себя, в качестве примера, пассажира транспортного средства или технического специалиста по обслуживанию или диспетчера парка или владельца осматривать ветровое стекло 14 на предмет повреждения. При нахождении какого-либо повреждения человек, взаимодействующий с транспортным средством, может ремонтировать такое повреждение, либо выполняя это сам, либо поручая другим выполнить ремонт. Отремонтировав повреждение или получив его отремонтированным, или альтернативно находя ветровое стекло целым и не нуждающимся в ремонте, технический специалист по обслуживанию или другой взаимодействующий человек может предоставлять входные данные в ECU 21, чтобы завершать предупреждение. Такая информация может предоставлять возможность предлагать ремонт или замену ветрового стекла и может инструктировать транспортному средству реагировать, чтобы минимизировать какое-либо усугубление какой-либо трещины или скола в ветровом стекле 14.
[0049] Следом за выдачей отчета об ударе ECU 21 может инструктировать транспортному средству парковаться в области не под прямым солнечным светом, пока не будет существовать возможность осмотра ветрового стекла транспортного средства. Избегание прямого солнечного света будет снижать риск того, что скол от камня станет неисправимой трещиной.
[0050] Исполнив какие-либо указания в ответ на инструкции сети, процесс 50 перемещается к этапу 80 обработки. На этапе 80 обработки транспортное средство 12 может использовать V2V-связь, чтобы предупреждать последующие транспортные средства 12A об ударе камня и географическом местоположении удара, отправляя сообщение таким последующим транспортным средствам. Этап 80 обработки может отправлять такое тревожное оповещение или сообщение другим транспортным средствам после всего лишь единственного удара или может альтернативно быть сконфигурировано, чтобы отправлять такое тревожное оповещение или сообщение после множества ударов, таких как три, в течение менее чем предварительно определенного периода времени, пять минут являются примерным периодом времени.
[0051] Выполнив инструкции на этапе 80, процесс 50 может продолжаться на этапе 82 принятия решения. Этап 82 принятия решения определяет, на основе доступной информации, прошел ли непосредственный риск ударов камней. Такая оценка может быть основана на информации от других транспортных средств о том, существуют ли какие-либо другие транспортные средства, подвергающиеся ударам камней, данных от датчиков 22 транспортного средства 12, указывающих присутствие рисков удара камня, таких как большие грузовые автомобили. Этап принятия решения может определять, что риск прошел, когда не существуют большие грузовые автомобили впереди транспортного средства 12, и предварительно определенный период времени, такой как три минуты, прошел после последнего удара камня. Когда определяется, что риск прошел, процесс 50 циклически возвращается назад к этапу 54 принятия решения. Когда определяется, что риск не прошел, процесс 50 продолжает проверять прохождение риска.
Заключение
[0052] Были описаны примерная система и способ для идентификации и реакции на удар камня.
[0053] Когда используется в данном документе, наречие "по существу" означает, что форма, структура, показатель, количество, время и т.д. могут отклоняться от точно описанной геометрии, расстояния, показателя, количества, времени и т.д. вследствие несовершенств в материалах, механической обработке, производстве, передаче данных, скорости вычислений и т.д.
[0054] Что касается ссылок на множество ECU в настоящем описании, вычислительные устройства, такие как обсуждаемые в данном документе, как правило, каждое, включают в себя инструкции, исполняемые одним или более вычислительными устройствами, такими как идентифицированные выше, и для выполнения блоков или этапов процессов, описанных выше. Например, этапы обработки, обсужденные выше, осуществляются как компьютерные исполняемые инструкции.
[0055] В целом, описанные вычислительные системы и/или устройства могут применять любую из множества компьютерных операционных систем, включающих в себя, но не считающихся ограниченными, версии и/или разновидности операционной системы Ford Sync®, микропрограммного обеспечения AppLink/Smart Device Link, операционной системы Microsoft Automotive®, операционной системы Microsoft Windows®, операционной системы Unix (например, операционной системы Solaris®, распространяемой корпорацией Oracle Corporation из Редвуд Шорс, Калифорния), операционной системы AIX UNIX, распространяемой компанией International Business Machines из Армонка, Нью-Йорк, операционной системы Linux, операционных систем Mac OS X и iOS, распространяемых компанией Apple Inc. из Купертино, Калифорния, BlackBerry OS, распространяемой компанией Blackberry Ltd из Ватерлоо, Канада, и операционной системы Android, разрабатываемой компанией Google Inc. открытым альянсом мобильных телефонов, или платформы QNX® CAR Platform for Infotainment, предлагаемой компанией QNX Software Systems. Примеры вычислительных устройств включают в себя, без ограничения, бортовой компьютер транспортного средства, компьютерную рабочую станцию, сервер, настольный компьютер, ноутбук, портативный или карманный компьютер или некоторую другую вычислительную систему и/или устройство.
[0056] Компьютеры и вычислительные устройства, как правило, включают в себя компьютерно-исполняемые инструкции, при этом инструкции могут исполняться одним или более вычислительными устройствами, такими как перечисленные выше. Компьютерно-исполняемые инструкции могут быть скомпилированы или интерпретированы из компьютерных программ, созданных с помощью множества языков и/или технологий программирования, включающих в себя, без ограничения, и либо отдельно, либо в комбинации, Java™, C, C++, Matlab, Simulink, Stateflow, Visual Basic, Java Script, Perl, HTML и т.д. Некоторые из этих приложений могут быть скомпилированы и выполнены на виртуальной машине, такой как Java Virtual Machine, виртуальная машина the Dalvik или т.п. В целом, процессор (например, микропроцессор) принимает инструкции, например, из памяти, компьютерно-читаемого носителя и т.д. и выполняет эти инструкции, таким образом, выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие инструкции и другие данные могут быть сохранены и переданы с помощью множества компьютерно-читаемых носителей. Файл в вычислительном устройстве, в целом, является совокупностью данных, сохраненных на считываемом компьютером носителе, таком как носитель хранения, оперативное запоминающее устройство и т.д.
[0057] Память может включать в себя компьютерно-читаемый носитель (также называемый процессорно-читаемым носителем), который включает в себя любой нетранзиторный (например, материальный) носитель, который участвует в предоставлении данных (например, инструкций), которые могут быть считаны компьютером (например, процессором компьютера). Такой носитель может принимать многие формы, включающие в себя, но не только, энергонезависимые носители и энергозависимые носители. Энергонезависимые носители могут включать в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители могут включать в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Такие инструкции могут быть переданы посредством одной или более сред передачи данных, включающих в себя коаксиальные кабели, медный провод и оптические волокна, включающие в себя провода, которые содержат системную шину, соединенную с процессором ECU. Обычные формы компьютерно-читаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационную карту, бумажную ленту, любой другой физический носитель с рисунками отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему памяти или картридж, или любой другой носитель, с которого компьютер может выполнять считывание.
[0058] Базы данных, банки данных или другие хранилища данных, описанные в данном документе, могут включать в себя различные виды механизмов для хранения, осуществления доступа и извлечения различных видов данных, включающие в себя иерархическую базу данных, набор файлов в файловой системе, прикладную базу данных в закрытом формате, систему управления реляционной базой данных (RDBMS) и т.д. Каждое такое хранилище данных, как правило, включено в вычислительное устройство, применяющее компьютерную операционную систему, такую как одна из упомянутых выше, и к нему осуществляется доступ через сеть любым одним или более из множества способов. Файловая система может быть доступна из операционной системы компьютера и может включать в себя файлы, сохраненные в различных форматах. RDBMS, как правило, применяет язык структурированных запросов (SQL) в дополнение к языку для создания, хранения, редактирования и выполнения сохраненных процедур, такой как язык PL/SQL, упомянутый выше.
[0059] В некоторых примерах элементы системы могут быть реализованы как компьютерно-читаемые инструкции (например, программное обеспечение) на одном или более вычислительных устройствах (например, серверах, персональных компьютерах и т.д.), сохраненные на считываемых компьютером носителях, ассоциированных с ним (например, дисках, запоминающих устройствах и т.д.). Компьютерный программный продукт может содержать такие инструкции, сохраненные на считываемых компьютером носителях, для выполнения функций, описанных в данном документе.
[0060] Что касается носителей, процессов, систем, способов, эвристических правил и т.д., описанных в данном документе, должно быть понятно, что, хотя этапы таких процессов и т.д. были описаны как происходящие согласно некой упорядоченной последовательности, такие процессы могут быть применены на практике с помощью описанных этапов, выполняемых в порядке, отличном от порядка, описанного в данном документе. Дополнительно должно быть понятно, что некоторые этапы могут выполняться одновременно, что другие этапы могут быть добавлены, или что некоторые этапы, описанные в данном документе, могут быть опущены. Другими словами, описания процессов в данном документе предоставлены с целью иллюстрации некоторых вариантов осуществления и не должны никоим образом истолковываться как ограничивающие формулу изобретения.
[0061] Соответственно, должно быть понятно, что вышеприведенное описание предназначено быть иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, отличные от предоставленных примеров, будут понятны специалистам в области техники по прочтении вышеприведенного описания. Рамки изобретения должны быть определены, не со ссылкой на вышеприведенное описание, но должны вместо этого быть определены со ссылкой на прилагаемую формулу изобретения, вместе с полными рамками эквивалентов, к которым такие пункты формулы приписаны. Ожидается и предполагается, что будущие разработки произойдут в технологиях, обсужденных в данном документе, и что раскрытые системы и способы будут включены в такие будущие варианты осуществления. Резюмируя, должно быть понятно, что изобретение способно к модификации и вариативности и ограничено только последующей формулой изобретения.
[0062] Все термины, используемые в формуле изобретения, предполагают получение их очевидных и обычных значений, которые понятны специалистам в области техники, пока явное указание на противоположное не будет выполнено в данном документе. В частности, использование сингулярных артиклей, таких как "a", "the", "упомянутый" и т.д., должно читаться, чтобы перечислять один или более указанных элементов, пока формула изобретения не перечислит явное ограничение до противоположного.




Предложено вычислительное устройство. Вычислительное устройство запрограммировано идентифицировать удар о ветровое стекло транспортного средства как удар камня на основе данных от датчика давления в ветровом стекле. После идентификации удара камня вычислительное устройство запрограммировано идентифицировать какой-либо большой грузовой автомобиль, расположенный в пределах предварительно определенного радиуса от транспортного средства, и активировать транспортное средство, чтобы выполнять маневр уклонения. Предложен также способ определения и реагирования на удар камня о ветровое стекло. Достигается предотвращение ударов камней о ветровое стекло. 2 н. и 18 з.п. ф-лы, 7 ил. 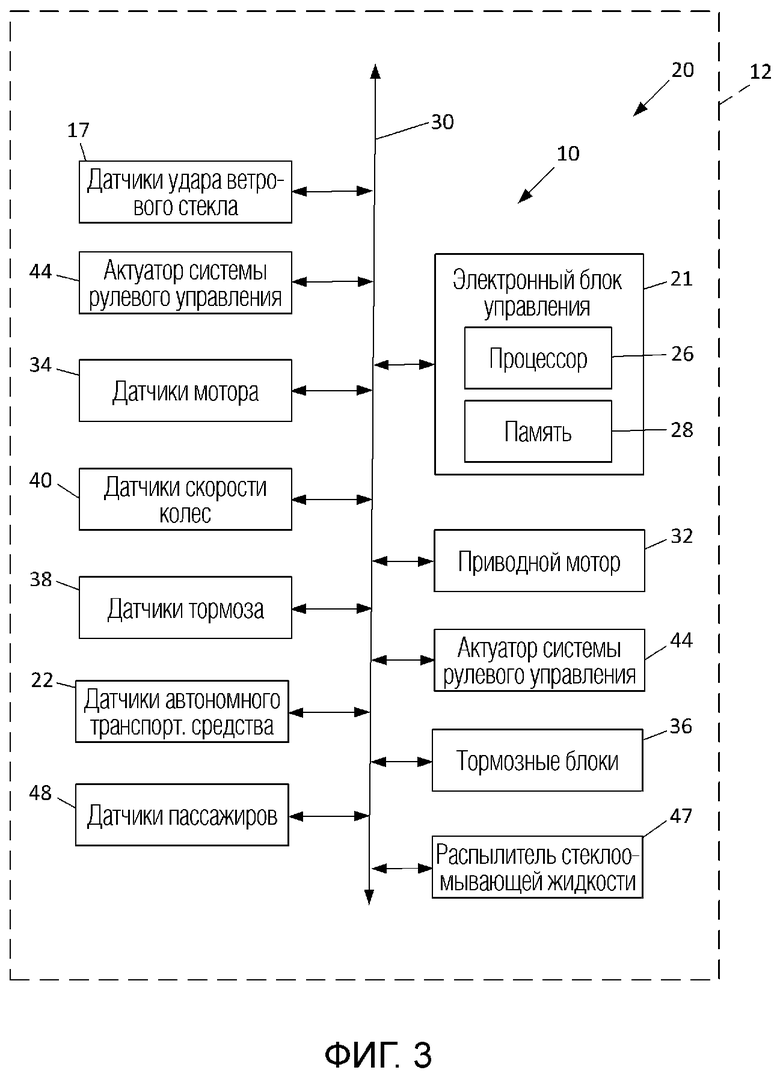
1. Вычислительное устройство, запрограммированное:
идентифицировать удар о ветровое стекло транспортного средства как удар камня на основе данных от датчика давления в ветровом стекле; и
после идентификации удара камня идентифицировать какой-либо большой грузовой автомобиль, расположенный в пределах предварительно определенного радиуса от транспортного средства, и активировать транспортное средство, чтобы выполнять маневр уклонения.
2. Вычислительное устройство по п. 1, в котором маневр уклонения включает в себя одно из обгона большого грузового автомобиля и увеличения расстояния между большим грузовым автомобилем и транспортным средством.
3. Вычислительное устройство по п. 1, в котором маневр уклонения является обгоном большого грузового автомобиля, и вычислительное устройство дополнительно программируется, чтобы распылять стеклоомывающую жидкость на ветровое стекло во время маневра уклонения.
4. Вычислительное устройство по п. 1, дополнительно запрограммированное, чтобы доставлять отчет об ударе человеку, взаимодействующему с транспортным средством.
5. Вычислительное устройство по п. 4, дополнительно запрограммированное, чтобы передавать предупреждение, легко очевидное пассажиру транспортного средства, что ветровое стекло может быть повреждено.
6. Вычислительное устройство по п. 5, дополнительно запрограммированное, чтобы прекращать предупреждение в ответ на входные данные от технического специалиста по обслуживанию об одном из того, что ветровое стекло было осмотрено и подтверждено как неповрежденное, и какое-либо повреждение, идентифицированное техническим специалистом, было отремонтировано.
7. Вычислительное устройство по п. 1, дополнительно запрограммированное, чтобы отправлять сообщение, предупреждающее другие транспортные средства о риске удара камня и местоположении риска, после идентификации удара камня.
8. Вычислительное устройство по п. 1, дополнительно запрограммированное, чтобы отправлять сообщение, предупреждающее другие транспортные средства о риске удара камня и местоположении риска удара камня, после идентификации множества ударов камней.
9. Вычислительное устройство по п. 1, дополнительно запрограммированное, чтобы, после приема множества сообщений об ударе камня от других транспортных средств, идентифицирующих риск удара камня и местоположение риска удара камня, выбирать новый маршрут вдали от местоположения риска удара камня.
10. Вычислительное устройство по п. 1, дополнительно запрограммированное, чтобы обнаруживать аномалии ветрового стекла с помощью данных от камеры, содержащей датчик автономного транспортного средства.
11. Способ определения и реагирования на удар камня о ветровое стекло, причем способ содержит этапы, на которых:
предоставляют транспортное средство, имеющее ветровое стекло, включающее в себя встроенный датчик давления; и
идентифицируют удар о ветровое стекло как удар камня на основе данных от датчика давления;
в ответ на идентификацию удара камня идентифицируют какой-либо большой грузовой автомобиль, расположенный в пределах предварительно определенного радиуса от транспортного средства; и
в ответ на идентификацию большого грузового автомобиля инструктируют транспортному средству выполнять маневр уклонения.
12. Способ по п. 11, в котором маневр уклонения включает в себя одно из обгона большого грузового автомобиля и увеличения расстояния между большим грузовым автомобилем и транспортным средством.
13. Способ по п. 11, в котором маневр уклонения является обгоном большого грузового автомобиля, и способ дополнительно содержит этап распыления стеклоомывающей жидкости на ветровое стекло во время маневра уклонения.
14. Способ по п. 11, дополнительно содержащий этап, на котором предоставляют отчет об ударе человеку, взаимодействующему с транспортным средством.
15. Способ по п. 14, дополнительно содержащий этапы, на которых:
человек, взаимодействующий с транспортным средством, осматривает повреждение ветрового стекла; и
если человек находит повреждение ветрового стекла, человек ремонтирует повреждение.
16. Способ по п. 11, дополнительно содержащий этап, на котором отправляют сообщение, предупреждающее другие транспортные средства о риске удара камня и местоположении риска после идентификации удара камня.
17. Способ по п. 11, дополнительно содержащий этап, на котором отправляют сообщение, предупреждающее другие транспортные средства о риске удара камня и местоположении риска удара камня после идентификации множества ударов камней.
18. Способ по п. 11, дополнительно содержащий этап, на котором выбирают новый маршрут вдали от местоположения риска удара камня после приема множества сообщений об ударах камней от других транспортных средств, идентифицирующих местоположение риска удара камня.
19. Способ по п. 11, дополнительно содержащий этап, на котором обнаруживают аномалии ветрового стекла с помощью данных от камеры, содержащей датчик автономного транспортного средства.
20. Способ по п. 11, дополнительно содержащий этап, на котором паркуют транспортное средство в области не под прямым солнечным светом после идентификации удара как удара камня.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |

