Область техники, к которой относится изобретение
Настоящее изобретение относится к системе, управляющей множеством приводов, встроенных в транспортное средство, и более конкретно к системе управляющей интегрированным способом множеством приводов с возможностью взаимного влияния.
Описание предшествующего уровня техники
В последние годы существовала увеличивающаяся тенденция к включению многих типов устройств управления движением в одно транспортное средство для управления движением транспортного средства. Эффект, производимый каждым из различных типов устройств управления движением, может не всегда проявляться способом, независимым друг от друга в транспортном средстве. Есть возможность взаимных помех. Поэтому важно на должном уровне организовать взаимодействие и координацию между соответствующими устройствами управления движением при разработке транспортного средства, которое включает в себя множество типов устройств управления движением.
Например, когда требуется включать множество типов устройств управления движением в одно транспортное средство на стадии разработки транспортного средства, можно разработать соответствующие устройства управления движением независимо друг от друга и затем осуществлять взаимодействие и координацию между соответствующими устройствами управления движением вспомогательным или дополнительным способом.
В случае разработки множества типов устройств управления движением вышеупомянутым способом организация взаимодействия и координации между соответствующими устройствами управления движением требует большого количества времени и усилий.
Относительно схемы включения множества типов устройств управления движением в транспортное средство известна схема совместного использования одного привода множеством устройств управления движением. Эта схема затрагивает проблему, заключающуюся в том, как разрешить конфликт между множеством устройств управления движением, когда требуется использовать один и тот же привод одновременно.
В указанном выше случае, когда взаимодействие и координация среди множества устройств управления движением должны быть организованы вспомогательным или дополнительным способом после того, как устройства управления движением разработаны независимо друг от друга, трудно квалифицированно решить указанную проблему. Практически проблема может быть решена только посредством выбора надлежащего одного из множества устройств управления движением с приоритетом над другими и выделения привода для выбранного одного устройства управления движением.
Подход, связанный с указанной выше проблемой, в транспортном средстве, включающем в себя множество приводов для управления транспортным средством при желательном режиме работы, описан в следующих публикациях.
Публикация патента Японии №5-85228 (Документ 1) описывает электронную систему управления транспортным средством, которая может сократить время, требуемое для разработки, и может улучшать надежность, применимость и выполнимость обслуживания транспортного средства. Эта электронная система управления для транспортного средства включает в себя элементы, взаимодействующие для выполнения задач управления в отношении мощности двигателя, мощности привода и торможения, и элементы для координации совместных действий элементов для осуществления контроля эксплуатационных характеристик автомобиля в соответствии с запросами водителя. Соответствующие элементы сконфигурированы в форме множества иерархических уровней. По меньшей мере, один из координирующих элементов иерархического уровня приспособлен для воздействия на элемент следующего иерархического уровня при интерпретации запроса водителя относительно соответствующей эксплуатационной характеристики автомобиля, таким образом воздействуя на предварительно заданную зависимую систему системы "транспортное средство - водитель" при обеспечении характеристики, заданной иерархическим уровнем для этой зависимой системы.
Благодаря организации всей системы в иерархической конфигурации в соответствии с этой электронной системой управления для транспортного средства команда может быть передана только в направлении от верхнего уровня к более низкому уровню. Команда для выполнения запроса водителя передается в этом направлении. Соответственно достигнуто постижимое строение элементов, независимых друг от друга. Соединение отдельных систем может быть уменьшено до приемлемого уровня. Независимость соответствующих элементов отдельных систем позволяет разрабатывать отдельные элементы одновременно. Таким образом, каждый элемент может быть разработан в соответствии с заданной целью. Должны быть приняты во внимание только несколько интерфейсов относительно более высокого иерархического уровня и небольшое количество интерфейсов для более низкого иерархического уровня. Соответственно может быть достигнута совокупность оптимизации всей полноты совокупности водителя и электронной системы управления транспортным средством относительно расхода энергии, экологической совместимости, безопасности и комфорта. В результате может быть получена электронная система управления транспортным средством, позволяющая уменьшить время на разработку и усовершенствовать надежность, применимость и выполнимость обслуживания транспортного средства.
Опубликованная заявка на патент Японии №2003-191774 (Документ 2) описывает устройство управления движением транспортного средства интегрированного типа, адаптирующее иерархическим способом конфигурацию программных средств для устройства, которое управляет множеством приводов интегрированным способом для осуществления управления движением множества приводов различных типов в транспортном средстве, посредством чего строение иерархии оптимизировано с точки зрения практического использования. Это интегрированное устройство управления движением транспортного средства управляет множеством приводов интегрированным способом при помощи компьютера на основе информации, относящейся к управлению транспортным средством водителем, для выполнения множества типов управления движением транспортного средства. По меньшей мере, конфигурация программных средств среды аппаратного оборудования и конфигурации программных средств включает в себя множество элементов, организованных в иерархии в направлении от водителя к множеству приводов. Множество элементов включает в себя: (a) блок управления, определяющий параметр целевого состояния транспортного средства на основе информации, связанной с вождением, на высшем уровне; и (b) исполнительный блок, принимающий определенный целевой параметр состояния транспортного средства как команду от блока управления для выполнения полученной команды при помощи, по меньшей мере, одного из множества приводов на более низком уровне. Блок управления включает в себя блок управления высшего уровня и блок управления более низкого уровня, каждый из которых выдает команду управления множеством приводов интегрированным способом. Блок управления высшего уровня определяет первый целевой параметр состояния транспортного средства на основе информации, связанной с вождением, не принимая во внимание динамические характеристики транспортного средства, и выдает определенный первый целевой параметр состояния транспортного средства блоку управления более низкого уровня. Блок управления более низкого уровня определяет второй целевой параметр состояния транспортного средства на основе первого целевого параметра состояния транспортного средства, принятого от блока управления высшего уровня, принимая во внимание динамические характеристики транспортного средства, и выдает определенный второй целевой параметр состояния транспортного средства исполнительному блоку. Каждый из блока управления высшего уровня, блока управления более низкого уровня и исполнительного блока обуславливает выполнение компьютером множества программных модулей, независимых друг от друга в конфигурации программных средств, для выполнения их уникальных функций.
В соответствии с этим устройством управления движением транспортного средства интегрированного типа, по меньшей мере, конфигурация программных средств среды аппаратного оборудования и конфигурации программных средств организована в иерархической структуре таким образом, что она включает в себя: (a) блок управления, определяющий целевой параметр состояния транспортного средства на основе информации, связанной с действиями водителя, на высшем уровне в направлении от водителя к множеству приводов; и (b) исполнительный блок, принимающий определенный целевой параметр состояния транспортного средства, как команду от блока управления для выполнения принятой команды при помощи, по меньшей мере, одного из множества приводов на более низком уровне. Другими словами, по меньшей мере, конфигурация программных средств организована с иерархическими уровнями таким образом, что блок управления и исполнительный блок отделены друг от друга в этом устройстве управления движением транспортного средства. Поскольку блок управления и исполнительный блок независимы друг от друга в перспективе конфигурации программных средств, соответствующие стадии разработки, проектирования, модификаций проектирования, отладки и т.п. могут осуществляться без влияния друг на друга. Соответствующие стадии могут осуществляться одновременно друг с другом. В результате период рабочей стадии, требуемый для выполнения полной конфигурации программных средств, может быть легко сокращен при использовании интегрированного устройства управления движением транспортного средства.
Электронная система управления для транспортного средства, описанная в Документе 1, невыгодна тем, что общая управляемость транспортного средства ухудшается в случае системной неисправности на верхнем иерархическом уровне, поскольку вся система имеет иерархическую структуру.
Устройство управления движением транспортного средства интегрированного типа, описанное в Документе 2, в частности, имеет иерархическую структуру согласно Документу 1 и направлено на оптимизацию иерархической структуры с точки зрения практического использования. В частности, конфигурация программных средств разделена на, по меньшей мере, блок управления и исполнительный блок, независимые друг от друга на иерархическом уровне. Хотя это устройство управления движением транспортного средства интегрированного типа выгодно с точки зрения параллельной разработки благодаря их независимости, проблема зависимости от базовой концепции иерархии еще не решена.
Описание изобретения
С учетом указанного выше целью настоящего изобретения является получение интегрированной системы управления транспортным средством, имеющей улучшенную способность отказоустойчивости и способной легко приспосабливаться к добавлению функции управления транспортным средством без формирования системы, которая генерирует цель управления транспортным средством в одном месте.
Интегрированная система управления транспортным средством, соответствующая настоящему изобретению, включает в себя, по меньшей мере, три подсистемы, работающие автономно и параллельно. Эти подсистемы включают в себя блок считывания, считывающий информацию, связанную с рабочим запросом относительно, по меньшей мере, одной подсистемы, блок связи для связи с другой подсистемой, отличной от собственной подсистемы, и генерирующий блок для генерирования информации, связанной с индивидуальной целью управления его собственной подсистемы на основе считываемой информации, относящейся к рабочему запросу.
Например, подсистема, соответствующая настоящему изобретению, включает в себя, по меньшей мере, подсистему управления системой регулирования числа оборотов, управляющую устройством системы регулирования числа оборотов, подсистему управления тормозной системой, управляющую устройством тормозной системы, и подсистему управления системой рулевого управления, управляющую устройством системы рулевого управления. Эти подсистемы работают автономно и параллельно друг другу. Например, блок считывания подсистемы управления системой регулирования числа оборотов отслеживает манипуляции педалью акселератора, которые являются запросом водителя. Блок считывания блока управления тормозной системой отслеживает манипуляции педалью тормоза, которые являются запросом водителя, и/или характеристики движения транспортного средства, такие как скорость транспортного средства, продольное ускорение, поперечное ускорение, угловая скорость рыскания и т.п. Блок считывания блока управления системой рулевого управления отслеживает манипуляции рулевым колесом, которые являются запросом водителя. Эти подсистемы связаны с другой подсистемой, отличной от собственной подсистемы. Генерирующий блок в этих подсистемах генерирует информацию, связанную с каждой индивидуальной целью управления его собственной подсистемы (например, информацию, связанную с целью управления для управления характеристиками движения транспортного средства) на основе считываемой информации и информации, принятой от другой подсистемы. Генерирующий блок подсистемы управления системой регулирования числа оборотов генерирует цель управления системой регулирования числа оборотов на основе информации, вычисленной в соответствии с манипуляциями педалью акселератора с использованием базовой модели управления водителем, а также входящую информацию от другой подсистемы. Генерирующий блок подсистемы управления тормозной системой генерирует цель управления тормозной системой на основе информации, вычисленной в соответствии с манипуляциями педалью тормоза с использованием базовой модели торможения водителем, а также входящей информации от другой подсистемы. Генерирующий блок подсистемы управления системой рулевого управления генерирует цель управления системы рулевого управления на основе информации, вычисленной в соответствии с манипуляциями органами рулевого управления с использованием базовой модели рулевого управления водителем, а также входящей информации от другой подсистемы. В этой стадии в генерирующем блоке, например, осуществляется оценка того, какому из множества информационных сообщений следует отдать приоритет. Таким образом, заданная информация передается с использованием блока связи, включенного в эти три подсистемы, для генерирования заданной цели управления (информация, относящаяся к индивидуальной цели управления собственной подсистемы) в соответствующих генерирующих блоках. Управление осуществляется децентрализованным способом без установки главного блока и способность отказоустойчивости может быть улучшена. Кроме того, благодаря автономной работе разработка возможна на основе каждого блока управления и блока обработки. В случае, когда должна быть добавлена новая функция поддержки вождения, новая функция (например, система поддержки вождения (DSS), такая как автомат (автоматическое поддержание) постоянной скорости, и/или система управления движением транспортного средства (VDM: Управление динамикой транспортного средства)), может быть осуществлена посредством лишь добавления новой подсистемы в дополнение к этим трем подсистемам, указанным выше, и передает требуемую информацию между новой подсистемой и уже существующей подсистемой через блок связи. В результате может быть получена интегрированная система управления транспортным средством с улучшенной способностью отказоустойчивости и способная легко приспосабливаться к добавлению функции управления транспортным средством без формирования системы, которая генерирует цель управления транспортным средством в одном месте.
Предпочтительно генерирующий блок включает в себя арбитражный блок для принятия решения о выборе из множества информационных данных для генерирования информации, относящейся к индивидуальной цели управления его собственной подсистемы на основе считываемой информации, относящейся к рабочему запросу.
В дополнение к указанным выше трем подсистемам, то есть подсистеме управления системой регулирования числа оборотов, подсистеме управления тормозной системой и подсистемой управления системой рулевого управления настоящего изобретения, подсистема, образующая систему поддержки вождения, сконфигурирована для работы автономно и параллельно. В случае, когда информация запроса при вождении передается от подсистемы, реализующей систему поддержки вождения, к подсистеме управления системой регулирования числа оборотов в такой конфигурации, арбитражный блок подсистемы, реализующей систему поддержки вождения, выполняет арбитраж для определения того, действительно ли полученная информация от системы поддержки вождения, которая является входящей информацией в дополнение к запросу водителя, должна быть отражена на управлении движением транспортного средства, и до какой степени, если должна быть отражена. В результате этого арбитража генерируется цель управления регулированием числа оборотов. Вместо информации, переданной от одной подсистемы другой подсистеме, которая используется в подсистеме принимающей стороны для генерирования цели управления движением, цель управления генерируется после арбитража арбитражным блоком. Поскольку подсистемы работают автономно, разработка может осуществляться на основе каждой подсистемы. Кроме того, когда должна быть добавлена новая функция поддержки вождения или подобная, новая функция может быть реализована посредством лишь добавления подсистемы. В результате может быть получена интегрированная система управления транспортным средством, имеющая улучшенную способность отказоустойчивости и способная легко приспосабливаться к добавлению функции управления транспортным средством без формирования системы, которая генерирует цель управления транспортным средством в одном месте.
Интегрированная система управления транспортным средством, соответствующая другому объекту настоящего изобретения, включает в себя, по меньшей мере, три подсистемы, работающие автономно и параллельно. Эти подсистемы включают в себя блок считывания для считывания информации, относящейся к рабочему запросу относительно, по меньшей мере, одной подсистемы, блок связи для связи с другой подсистемой, отличной от собственной подсистемы, и арбитражный блок для выполнения арбитража среди множества информационных данных для генерирования информации, относящейся к индивидуальной цели управления его собственной подсистемы, на основе считываемой информации, относящейся к рабочему запросу.
В соответствии с настоящим изобретением подсистема управления системой регулирования числа оборотов, соответствующая операции "рабочего хода", которая является основной операцией транспортного средства, подсистема управления тормозной системой, соответствующая операции "остановки", и подсистема управления рулевой системой, соответствующая операции "поворота", сконфигурированы для работы автономно и параллельно друг к другу. Кроме того, в случае, когда должна быть реализована система поддержки вождения (например, DSS) высокого уровня, подсистему поддержки вождения высокого уровня, осуществляющую поддержку вождения на высоком уровне, конфигурируют так, что она работает автономно и параллельно, в дополнение к подсистеме управления системой регулирования числа оборотов, подсистеме управления тормозной системой и подсистеме управления системной рулевого управления, указанным выше. Когда информация запроса вождения передается от подсистемы поддержки вождения высокого уровня подсистеме управления системой регулирования числа оборотов в такой конфигурации, арбитражный блок подсистемы поддержки вождения высокого уровня выполняет арбитраж для определения того, должна ли информация, принятая от системы поддержки вождения высокого уровня, которая поступила в дополнение к запросу водителя, отражаться на управлении движением транспортного средства, и до какой степени, если должна отражаться. В результате арбитража генерируется цель управления регулированием числа оборотов. Вместо информации, переданной от подсистемы другой подсистеме для использования в подсистеме принимающей стороны для генерирования цели управления движением, цель управления генерируется после арбитража, выполняемого арбитражным блоком. Поскольку подсистема работает автономно, возможна разработка на основе каждой подсистемы. Кроме того, когда должна быть добавлена новая функция или подобная, новая функциональность может быть реализована посредством лишь добавления подсистемы. В таком случае подсистема может быть легко добавлена посредством подключения подсистем друг к другу через блок связи подсистемы для передачи требуемой информации. Даже в случае, когда одна (например, подсистема поддержки вождения высокого уровня) выходит из строя, основная работа транспортного средства может поддерживаться, пока другие три подсистемы (подсистема управления системой регулирования числа оборотов, подсистема управления тормозной системой и подсистема управления системой рулевого управления) работают, поскольку подсистемы работают автономно и параллельно друг к другу. В результате может быть получена интегрированная система управления транспортным средством, имеющая улучшенную способность отказоустойчивости и способная к легкому приспособлению к добавлению функций управления транспортным средством без формирования системы, которая генерирует цель управления транспортным средством в одном месте.
Кроме того, предпочтительно, арбитражный блок определяет приоритет информации.
В случае, когда информация получена от множества подсистем, когда должна быть генерирована цель управления, например, в подсистеме управления системой регулирования числа оборотов в соответствии с настоящим изобретением, определяется приоритет относительно того, какой информации из информации, относящейся к значению цели управления на основе уровня манипуляции педалью акселератора, и полученной информации следует отдать приоритет (включая случай, когда информация также получена от другой подсистемы). Поскольку цель управления генерируется на основе определенного приоритета, может быть сделано надлежащее определение относительно того, какой из информации, требуемой для генерирования цели управления системой регулирования числа оборотов на основе уровня манипуляции акселератором со стороны водителя и информации, требуемой для генерирования цели управления вождением, принятой от подсистемы поддержки вождения высокого уровня, должен быть отдан приоритет.
Кроме того, предпочтительно арбитражный блок корректирует информацию.
В соответствии с настоящим изобретением, для осуществления арбитража между считываемой информацией (о степени нажатия на педаль акселератора и/или степени нажатия на педаль тормоза) и информацией, принятой от другой подсистемы, значение цели управления может быть скорректировано взвешенной операцией, например, для генерирования цели управления.
Кроме того, предпочтительно арбитражный блок обрабатывает информацию.
В соответствии с настоящим изобретением информация, такая как информация о степени риска, может быть обработана и выдана в другую подсистему таким образом, что считываемая информация (о коэффициенте сцепления с дорожной поверхностью) может использоваться в другой подсистеме для арбитража. В другой подсистеме, принимающей такую информацию, информация может использоваться для генерирования цели управления без ее обработки.
Кроме того, предпочтительно подсистема включает в себя подсистему управления системой регулирования числа оборотов, подсистему управления тормозной системой и подсистему управления системой рулевого управления.
В соответствии с настоящим изобретением подсистема управления системой регулирования числа оборотов, соответствующая операции "рабочий ход", которая является основной операцией транспортного средства, подсистема управления тормозной системой, соответствующая операции "остановки", и подсистема управления системой рулевого управления, соответствующая операции "поворота", конфигурированы так, что они действуют автономно и параллельно друг к другу. Кроме того, в случае, когда должна быть реализована система поддержки вождения высокого уровня, к этим подсистемам должен быть добавлен только рабочий блок, реализующий систему поддержки вождения высокого уровня.
Кроме того, предпочтительно подсистема также включает в себя подсистему автоматического поддержания постоянной скорости, управляющую транспортным средством для автоматического поддержания постоянной скорости или псевдоавтоматического поддержания постоянной скорости транспортного средства.
В соответствии с настоящим изобретением подсистема автоматического поддержания постоянной скорости добавлена в дополнение к трем основным подсистемам (подсистеме управления системой регулирования числа оборотов, подсистеме управления тормозной системой и подсистеме управления системой рулевого управления). Поскольку три основные подсистемы, а также подсистема автоматического поддержания постоянной скорости работают автономно и параллельно, разработка может осуществляться независимо, и функция может быть легко добавлена. Такая добавленная функция облегчает изменение содержания функций для каждого типа транспортного средства. Псевдоавтоматическая функция поддержания постоянной скорости включает в себя функции, соответствующие автоматическому поддержанию постоянной скорости, такие как функция автоматического поддержания скорости, функция содействия следованию полосе движения и т.п.
Кроме того, предпочтительно подсистема также включает в себя подсистему динамической стабилизации, управляющую транспортным средством для стабилизации состояния характеристик транспортного средства.
В соответствии с настоящим изобретением состояние характеристик транспортного средства считывается при помощи различных датчиков, которыми снабжено транспортное средство. Например, состояние характеристик транспортного средства включает в себя ускорение в продольном направлении или боковом направлении транспортного средства. Когда на основе низкого коэффициента сцепления с дорожной поверхностью обнаруживается тенденция скольжения транспортного средства, подсистема динамической стабилизации генерирует информацию, относящуюся к значению цели управления, для предотвращения скольжения транспортного средства. При приеме этой генерированной информации в подсистеме управления системой регулирования числа оборотов арбитражный блок отдает ей приоритет и использует полученную информацию вместо информации об уровне манипуляции водителем педалью акселератора. Таким образом, система управления для стабилизации транспортного средства может быть легко конфигурирована по сравнению с манипуляциями водителем.
Краткое описание чертежей
Фиг.1 - схема транспортного средства, в которое включена интегрированная система управления транспортным средством, соответствующая первому варианту осуществления настоящего изобретения.
Фиг.2 - принципиальная схема конфигурации управления интегрированной системы управления транспортным средством, соответствующей первому варианту осуществления настоящего изобретения.
Фиг.3-5 - конфигурация выполнения интегрированной системы управления транспортным средством, соответствующей первому варианту осуществления настоящего изобретения (первая схема).
Фиг.6-7 - блок-схемы, представляющие конфигурацию управления программы, выполняемой в подсистеме 3, показанной на фиг.3.
Фиг.8-9 - блок-схемы, представляющие конфигурацию управления программы, выполняемой подсистемой 2, показанной на фиг.4.
Фиг.10-12 - блок-схемы, представляющие конфигурацию управления программы, выполняемой в подсистеме 1, показанной на фиг.5.
Фиг.13 - принципиальная схема, представляющая конфигурацию управления интегрированной системы управления транспортным средством, соответствующей второму варианту осуществления настоящего изобретения.
Фиг.14-16 - конфигурация выполнения интегрированной системы управления транспортным средством, соответствующей второму варианту осуществления настоящего изобретения.
Лучший способ осуществления изобретения
Варианты осуществления настоящего изобретения будут описаны далее со ссылками на чертежи. Одинаковые элементы имеют одинаковые ссылочные позиции и их назначение и функции также идентичны. Поэтому их детальное описание не будет повторяться.
Первый вариант осуществления изобретения
Как показано блок-схемой на фиг.1, интегрированная система управления транспортным средством, соответствующая варианту осуществления настоящего изобретения, имеет двигатель внутреннего сгорания, включенный в транспортное средство как источник приводной мощности. Источник приводной мощности не ограничен двигателем внутреннего сгорания и может быть отдельным электродвигателем или комбинацией двигателя внутреннего сгорания и электродвигателя. Источником энергии для электродвигателя может быть вторичная аккумуляторная батарея или другой элемент питания.
Транспортное средство включает в себя колеса 100 спереди и сзади на соответствующих сторонах. На фиг.1 "FL" обозначает переднее левое колесо, "FR" обозначает переднее правое колесо, "RL" обозначает левое заднее колесо и "RR" обозначает заднее правое колесо.
Транспортное средство включает в себя двигатель 140 как источник мощности. Управление рабочим состоянием двигателя 140 осуществляется электрическим способом в соответствии с величиной или уровнем манипулирования водителем педалью акселератора (которая является одним примером элемента, приводимого в действие водителем, связанного с приводом транспортного средства). Управление рабочим состоянием двигателя 140 осуществляется автоматически, по мере необходимости, независимо от манипуляций педалью 200 акселератора водителем (далее называемых "операциями регулирования числа оборотов" или "операциями ускорения").
Электрическое управление двигателем 140 может осуществляться, например, посредством электрического управления углом раскрыва (то есть открытия дросселя) дроссельной заслонки, расположенной во впускном коллекторе двигателя 140, или электрического управления количеством топлива, впрыскиваемого в камеру сгорания двигателя 140.
Транспортное средство, соответствующее данному варианту осуществления изобретения, представляет собой транспортное средство с задним приводом, в котором правое и левое передние колеса являются ведомыми колесами, и правое и левое задние колеса являются ведущими колесами. Двигатель 140 соединен с каждым из задних колес через преобразователь 220 крутящего момента, трансмиссию 240, карданный вал 260 и узел дифференциала 280, а также ведущий вал 300, который вращается с каждым задним колесом, расположенные в порядке описания. Преобразователь 220 крутящего момента, трансмиссия 240, карданный вал 260 и дифференциал 280 являются элементами передачи мощности, общими для правого и левого задних колес.
Трансмиссия 240 включает в себя автоматическую трансмиссию, которая не показана. Эта автоматическая трансмиссия электрическим способом управляет передаточным числом, при этом скорость вращения двигателя 140 преобразуется в скорость вращения выходного вала трансмиссии 240.
Транспортное средство также включает в себя рулевое колесо 440, приспособленное для вращения водителем. Устройство 480 приложения силы реакции рулевого управления электрическим способом прилагает силу реакции рулевого управления, соответствующую повороту водителем (далее называется "рулевым управлением") рулевого колеса 440. Уровень силы реакции рулевого управления контролируется электрическим способом.
Направление правого и левого передних колес, то есть угол поворота передних колес изменяется электрическим способом передним рулевым устройством 500. Переднее рулевое устройство 500 изменяет угол поворота передних колес на основе угла или угла поворота рулевого колеса, на который рулевое колесо 440 повернуто водителем. Управление углом поворота передних и задних колес осуществляется автоматически, по мере необходимости, независимо от операции поворота. Другими словами, рулевое колесо 440 механически изолировано от правого и левого передних колес.
Направление левого и правого колес, то есть угол поворота задних колес, изменяется электрическим способом задним рулевым устройством 520 аналогично углу поворота передних колес.
Каждое колесо 100 снабжено тормозом 560, который приводится в действие для ограничения вращения. Управление каждым тормозом 560 осуществляется электрическим способом в соответствии с величиной нажатия на педаль 580 тормоза (которая является одним примером элемента, приводимого в действие водителем и связанного с торможением транспортного средства), и также осуществляется индивидуально для каждого колеса 100 автоматически.
В данном транспортном средстве каждое колесо 100 подвешено на корпусе транспортного средства (не показан) при помощи отдельной подвески 620. Характеристики соответствующей подвески 620 индивидуально регулируются электрическим способом.
Составляющие элементы транспортного средства, описанного выше, включают в себя приводы, приспособленные для приведения в действие электрическим способом следующих соответствующих элементов:
(1) привод для электрического управления двигателем 140;
(2) привод для электрического управления трансмиссией 240;
(3) привод для электрического управления устройством 480 приложения силы реакции рулевого управления;
(4) привод для электрического управления передним рулевым устройством 500;
(5) привод для электрического управления задним рулевым устройством 520;
(6) множество приводов, примененных в сочетании с соответствующими тормозами 560 для электрического управления тормозным моментом, прилагаемым к каждому колесу соответствующим тормозом 560 индивидуально;
(7) множество приводов, примененных в сочетании с соответствующими подвесками 620, для электрического управления характеристиками соответствующей подвески 620 индивидуально.
Как показано на фиг.1, интегрированная система управления транспортным средством встроена в транспортное средство, имеющее множество соединенных с ней указанных выше приводов. Устройство управления движением приводится в действие электроэнергией, подаваемой от батареи, которая не показана (которая является примером источника электропитания транспортного средства).
Кроме того, для педали 200 акселератора может обеспечиваться устройство приложения силы реакции педали акселератора. В этом случае может применяться привод для электрического управления таким устройством приложения силы реакции педали акселератора.
На фиг.2 показана принципиальная схема конфигурации управления интегрированной системы управления транспортным средством, соответствующей данному варианту осуществления изобретения. Интегрированная система управления транспортным средством сформирована подсистемой 1 (основная функция управления), включающей в себя подсистему управления системой регулирования числа оборотов, соответствующую операции "рабочего хода", которая является основной операцией транспортного средства, подсистему управления тормозной системой, соответствующую операции "остановки", и подсистему управления системой рулевого управления, соответствующую операции "поворота", подсистемой 2 (функция управления стабилизацией транспортного средства), обеспечивающей динамическое управление движением и т.п.транспортного средства, такой как управление динамикой транспортного средства, и подсистемой 3 (функция поддержки вождения) для поддержки вождения транспортного средства, такой как система поддержки вождения DSS.
В подсистеме управления системой регулирования числа оборотов подсистемы 1 генерируется цель управления системой регулирования числа оборотов, соответствующая манипуляциям водителя, таким как манипуляции педалью акселератора, с использованием базовой модели регулирования числа оборотов водителем на основе манипуляций педалью акселератора и/или манипуляций в ручном режиме, которые являются считываемыми запросами водителя, благодаря чему осуществляется управление приводом.
В блоке запроса подсистемы управления системой регулирования числа оборотов входной сигнал от датчика, считывающего величину нажатия на педаль акселератора и т.п. водителем, анализируется с использованием базовой модели регулирования числа оборотов для вычисления целевого продольного ускорения Gx* (DRV0). В арбитражном блоке подсистемы управления системой регулирования числа оборотов осуществляется вычисление целевого вращающего момента τх* (DRV0) на основе целевого продольного ускорения Gx* (DRV0). В этом арбитражном блоке проводится арбитраж между целевым вращающим моментом τх* (DRV0) и входящей информацией от подсистемы 2 (целевой вращающий момент τх* (DRV)) для выбора одного из них или проведения операции на основе обоих значений, посредством чего вычисляется целевой вращающий момент τх* (DRV). Осуществляется управление приводом двигателя 100 и/или приводом трансмиссии 240 для создания этого целевого вращающего момента τх* (DRV).
В подсистеме управления тормозной системой подсистемы 1 генерируется цель управления тормозной системой, соответствующая манипуляции водителя, такой как манипуляция педалью тормоза, с использованием базовой модели торможения водителем на основе манипуляции педалью тормоза, которая является считываемым запросом водителя, посредством чего осуществляется управление приводом.
В блоке запроса подсистемы управления тормозной системой осуществляется анализ входного сигнала от датчика, считывающего величину нажатия водителем на педаль тормоза или подобные данные, с использованием базовой модели торможения для вычисления целевого продольного ускорения Gx* (BRK0). В арбитражном блоке подсистемы управления тормозной системой вычисляется целевой вращающий момент τх* (BRK0) на основе целевого продольного ускорения Gx* (BRK0). В этом арбитражном блоке проводится арбитраж между целевым вращающим моментом τх* (BRK0) и входящей информацией от подсистемы 2 (целевой вращающий момент τх* (BRK)) для выбора одного из них или проведения операции на основе обоих значений для вычисления целевого вращающего момента τх* (BRK). Осуществляется управление приводом тормоза 560 для получения этого целевого вращающего момента τх* (BRK).
В подсистеме управления системой рулевого управления подсистемы 1 генерируется цель управления системой рулевого управления в соответствии с манипуляцией водителя, такой как манипуляция рулевым колесом, с использованием базовой модели рулевого управления водителем на основе манипуляции рулевым управлением, которая является считываемым запросом водителя, посредством чего осуществляется управление приводом.
В блоке запроса подсистемы управления системой рулевого управления осуществляется анализ входного сигнала от датчика, считывающего угол манипуляции водителем рулевым колесом, с использованием базовой модели рулевого управления для вычисления целевого угла шины. В арбитражном блоке подсистемы управления системой рулевого управления проводится арбитраж между целевым углом шины и входящей информацией от подсистемы 2 (угол Δ шины) для выбора одного из них или проведения операции на основе обоих значений для вычисления целевого угла шины. Осуществляется управление приводами переднего рулевого устройства 500 и заднего рулевого устройства 520 для получения этого целевого угла шины.
В указанной выше подсистеме 1 информация выдается в подсистему 2 и подсистему 3. Например, информация, представляющая намерения водителя, выдается от базовой модели регулирования числа оборотов водителем, базовой модели торможения водителем и базовой модели рулевого управления водителем модулю запроса подсистемы 3. Кроме того, значения целевого продольного ускорения Gx* (DRV0), целевого продольного ускорения Gx* (BRK0) и угла шины, которые являются соответствующими выходными данными базовой модели регулирования числа оборотов водителем, базовой модели торможения водителем и базовой модели рулевого управления водителем, поступают в арбитражный блок подсистемы 2. Доступность регулирования числа оборотов и доступность торможения являются выходными данными арбитражного блока подсистемы управления системой регулирования числа оборотов и арбитражного блока подсистемы управления тормозной системой соответственно, поступающими в арбитражный блок подсистемы 2.
Различные типы информации, включая информацию о манипуляции водителя, хранятся в подсистеме 1 как совместно используемая информация (также называемая "совместно используемым сигналом"). Совместно используемая информация включает в себя значения угловой скорости γ рыскания, скорости Vx транспортного средства в продольном направлении, продольного ускорения Gx, поперечного ускорения Gy, коэффициента μ сцепления с дорожной поверхностью и т.п. Эта совместно используемая информация поступает в блоки запроса подсистем 1-3.
Подсистема 2 осуществляет функцию стабилизации состояния движения транспортного средства. Эти подсистема 2 и подсистема 3, которые будут описаны далее, осуществляют функцию, добавленную к основной функции управления транспортным средством подсистемы 1, указанной выше.
Подсистема 2 включает в себя модель выполнения водителем продольного ускорения, основанную на рулевом управлении, и модели рулевого управления водителем в блоке запроса. Совместно используемая информация и входящие данные об угле шины от подсистемы 1 (угол шины, вычисленный базовой моделью рулевого управления водителем подсистемы управления системой рулевого управления) анализируются с использованием модели выполнения водителем продольного ускорения на основе рулевого управления для вычисления целевого продольного ускорения Gx1*. Кроме того, проводится анализ совместно используемой информации и входящих данных об угле шины от подсистемы 1 (угле шины, вычисленном базовой моделью рулевого управления водителем подсистемы управления системой рулевого управления) с использованием модели рулевого управления водителем для вычисления целевого поперечного ускорения Gy* и целевой угловой скорости γ* рыскания. Информация, вычисленная в блоке запроса подсистемы 2, поступает в арбитражный блок.
Арбитражный блок подсистемы 2 включает в себя блок арбитражной обработки, трехмерный арбитражный блок, блок определения состояния дороги, блок ограничения и преобразования на основе состояния движения, блок распределения между торможением, регулированием числа оборотов и рулевым управлением, блок преобразования, блок распределения числа оборотов и торможения между четырьмя колесами и блок распределения и преобразования.
Блок арбитражной обработки проводит процесс арбитража между целевым продольным ускорением Gx* (системой поддержки вождения) для осуществления функции поддержки вождения от арбитражного блока подсистемы 3, целевым продольным ускорением Gx* (DRV0), вычисленным базовой моделью вождения водителем подсистемы управления системой вождения подсистемы 1, и целевым продольным ускорением Gx* (BRK0), вычисленным базовой моделью торможения водителем подсистемы управления тормозной системой подсистемы 1. На этой стадии используются входящие сигналы о возможности регулирования числа оборотов от арбитражного блока подсистемы управления системой регулирования числа оборотов подсистемы 1 и возможности торможения от арбитражного блока подсистемы управления тормозной системой подсистемы 1. В результате арбитража в блоке арбитражной обработки значение целевого продольного ускорения Gx0* поступает в трехмерный арбитражный блок. Кроме того, информация о возможности использования продольного G выдается в блок запроса подсистемы 3.
Арбитражный трехмерный блок проводит процесс арбитража между целевым продольным ускорением Gxl* от блока запроса, целевым поперечным ускорением Gy*, целевой угловой скоростью γ* рыскания и целевым продольным ускорением Gx0* от блока арбитражной обработки и целевым продольным ускорением Gx* (система поддержки вождения) от арбитражного блока подсистемы 3. В результате процесса арбитража, выполненного трехмерным арбитражным блоком, выдаются данные о целевом продольном ускорении Gx*, целевом поперечном ускорении Gy*, целевой угловой скорости γ* рыскания, целевом угле β* бокового увода корпуса и дифференциальном целевом значении dVy* поперечной скорости корпуса в блок ограничения и преобразования на основе состоянии движения.
Коэффициент сцепления с дорожной поверхностью (значение μ), который является одной совместно используемой информацией, данные о скорости Vw колеса и угле шины, поступающие от базовой модели вождения водителем подсистемы управления системой рулевого управления подсистемы 1, поступают в блок определения состояния дороги. Операция выполняется на основе этих входных данных в блоке определения состояния дороги для получения значения μ, которое является значением сопротивления качению колеса для блока ограничения и преобразования на основе состоянии движения.
В блоке ограничения и преобразования на основе состояния движения выполняется операция на основе целевого продольного ускорения Gx*, целевого поперечного ускорения Gy*, целевой угловой скорости γ* рыскания, целевого угла β* бокового увода корпуса и дифференциального целевого значения dVy* поперечной скорости бокового увода корпуса, поступающих от трехмерного арбитражного блока, а также значения μ от блока определения состояния дороги для получения Fx*, которая является силой в целевом продольном направлении, Fy*, которая является силой в целевом боковом направлении, и целевого момента M* вокруг оси Z для блока распределения между торможением, регулированием числа оборотов и рулевым управлением. Верхний и нижний пределы продольного значения G движения с добавленным рулевым управлением выдаются как информация о возможностях от блока ограничения и преобразования на основе состояния движения в подсистему 3.
Блок распределения между торможением, регулированием числа оборотов и рулевым управлением осуществляет процесс распределения между тормозной системой, системой регулирования числа оборотов и системой рулевого управления на основе значений Fx*, которая является силой в целевом продольном направлении, Fy*, которая является силой в целевом боковом направлении, и целевого момента M* вокруг оси Z, поступающих от блока ограничения и преобразования на основе состояния движения, для получения угла Δ шины, в блок преобразования, и для выдачи целевой продольной силы Fx* и целевого момента M* вокруг оси Z в блок распределения торможения и регулирования числа оборотов между четырьмя колесами. Блок распределения торможения и регулирования числа оборотов между четырьмя колесами выполняет операцию на основе целевой продольной силы Fx* и целевого момента M* вокруг оси Z, прилагаемых блоком распределения между торможением, регулированием числа оборотов и рулевым управлением, для выдачи результата операции в блок распределения и преобразования.
Значение угла Δ шины, выдаваемое блоком преобразования подсистемы 2, поступает в арбитражный блок подсистемы 1. Целевой вращающий момент τх* (DRV), выдаваемый блоком распределения и преобразования подсистемы 2, используется в арбитражном блоке подсистемы управления системой регулирования числа оборотов подсистемы 1. Целевой вращающий момент τх* (BRK), выдаваемый блоком распределения и преобразования подсистемы 2, используется в арбитражном блоке подсистемы тормозной системы подсистемы 1.
В подсистеме 3 совместно используемая информация и информация об окружающей среде используются блоком запроса. Кроме того, информация, представляющая намерение водителя, вводится от базовой модели регулирования числа оборотов водителем, базовой модели торможения водителем и базовой модели рулевого управления водителем подсистемы 1. Следуя процессу, выполняемому в блоке запроса, информация для осуществления работы, например, адаптивного автомата постоянной скорости поступает в арбитражный блок на основе расстояния между транспортными средствами и т.п. Блок запроса подсистемы 3 принимает данные о доступности продольного G, поступающие от арбитражного блока подсистемы 2, и также значения верхнего и нижнего пределов (доступности) продольного G движения, прибавленных к данным рулевого управления от блока ограничения и преобразования на основе данных состояния движения подсистемы 2.
В соответствии с информацией, выдаваемой блоком запроса подсистемы 3, арбитражный блок подсистемы 3 выполняет операцию при помощи блока поддержки вождения и блока управления прерыванием. Из блока поддержки вождения значение целевого продольного ускорения Gx* (система поддержки вождения) выдается в арбитражный блок подсистемы 2. Кроме того, значение целевого продольного ускорения Gx* (система поддержки вождения) выдается из блока управления прерыванием в трехмерный арбитражный блок подсистемы 2. Данная подсистема 3 включает в себя адаптивный автомат постоянной скорости и т.п. для осуществления псевдоавтоматического поддержания постоянной скорости. Этот адаптивный автомат постоянной скорости приспособлен для поддержания заданного расстояния до транспортного средства, движущегося спереди, а также для поддержания следования данной полосе движения.
Фиг.3-5 представляют конфигурацию выполнения интегрированной системы управления транспортным средством, показанной на фиг.2. В частности, фиг.3, 4 и 5 представляют конфигурацию выполнения подсистемы 3, подсистемы 2 и подсистемы 1 соответственно.
Как показано на фиг.3, подсистема 3 выполнена для осуществления конфигурации управления, показанной на фиг.2. Арбитратор подсистемы 3 принимает запрос Gx и/или запрос о доступности Gx от контроллера, который выполняет управление системой управления регулированием числа оборотов, такого как контроллер управления автоматом постоянной скорости.
В арбитраторе, показанном на фиг.3, команда Gx и запрос доступности Gx, которые должны выдаваться в подсистему 2, вычисляются на основе входной команды Gx (Gx_sys1) и доступности Gx (Gx_avb).
Как показано на фиг.4, арбитратор подсистемы 2 принимает запрос Gx (Gx_drv1) от модели регулирования числа оборотов водителем на основе рулевого управления, а также запрос о доступности Gx. Арбитратор подсистемы 2 также принимает запрос Gy (Gy_drv2) от модели рулевого управления водителем, запрос ((γ_drv), запрос доступности Gy (Gy_avb) и запрос доступности ((γ_avb).
В арбитраторе подсистемы 2 выполняется операция на основе команды Gx и запроса доступности Gx (Gx_avb), поступающих от подсистемы 3, а также запроса значения Gx, запроса значения Gy, запроса значения γ, запроса значения угла шины, а также запроса доступности Gx, запроса доступности Gy и входного запроса доступности (в пределах подсистемы 2 для вычисления значения команды, которая должна быть выдана арбитратору регулирования числа оборотов, который является арбитратором системы регулирования числа оборотов подсистемы 1, арбитратору торможения, который является арбитратором тормозной системы, и арбитратору рулевого управления, который является арбитратором системы рулевого управления.
На этой стадии команды (τа) вращающего момента и запроса доступности вращающего момента (τа_avb) выдаются из арбитратора подсистемы 2 арбитратору регулирования числа оборотов подсистемы 1. Команда (τb) тормозного момента и запрос о доступности тормозного момента (τb_avb) выдается арбитратором подсистемы 2 арбитратору торможения подсистемы 1. Команда угла Δ шины и запрос о доступности (▵_avb) угла шины выдается от арбитратора подсистемы 2 арбитратору рулевого управления подсистемы 1.
Как показано на фиг.5, подсистема 1 включает в себя подсистему системы управления регулированием числа оборотов, подсистему управления тормозной системой и подсистему системы управления рулевым управлением, как указано выше. В соответствующих подсистемах используется конфигурация, включающая в себя арбитратор регулирования числа оборотов, арбитратор торможения и арбитратор рулевого управления.
Арбитратор регулирования числа оборотов, показанный на фиг.5, принимает запрос Gx (Gx_drv3) и запрос (Gx_avb) о доступности Gx от базовой модели регулирования числа оборотов водителем, а также запрос Gx (Gx_a) и запрос (Gx_avb) доступности Gx от арбитратора подсистемы 2. Арбитратор регулирования числа оборотов оценивает целевое значение, связанное с регулированием числа оборотов, на основе запроса водителя, поступающего от базовой модели регулирования числа оборотов водителем, и другой информации, отличной от запроса манипуляции водителя, поступающей от арбитратора подсистемы 2, для создания команды (τa_out) вращающего момента и запроса (τa_avb) доступности вращающего момента для контроллера трансмиссии.
В контроллере трансмиссии осуществляется управление трансмиссией (двигателем 100 и трансмиссией 240) таким образом, что фактический вращающий момент является равным команде (τa_out) вращающего момента. Кроме того, выдается ответ на запрос Gx (Gx_a) и доступность Gx (Gx_avb) от арбитратора регулирования числа оборотов арбитратору подсистемы 2.
Арбитратор торможения тормозной подсистемы управления тормозной системой подсистемы 1 принимает запрос Gx и запрос доступности Gx от базовой модели торможения водителем. Кроме того, команда (τb) тормозного момента и запрос (τb_avb) доступности тормозного момента выдается от арбитратора подсистемы 2 арбитратору торможения. Арбитратор торможения проводит арбитраж на основе входных данных в соответствии с манипуляцией водителя и другой информацией, отличной от манипуляции водителя для выдачи выходных команд (τb_out) тормозного момента и запроса (τb_avb) доступности тормозного момента в контроллер торможения. Контроллер торможения управляет фактическим тормозным моментом для выполнения команды (τb_out) тормозного момента, выводимой от арбитратора торможения. На этой стадии осуществляется управление торможением колеса. Кроме того, осуществляется управление для увеличения генерирования регенеративной мощности двигателем-генератором и т.п. в гибридном транспортном средстве. Кроме того, запрос Gx (Gx_b) и ответ о доступности Gx (Gx_avb) выдаются от арбитратора торможения арбитратору подсистемы 2.
Запрос значения угла шины и запрос о доступности угла шины выдаются от базовой модели рулевого управления водителем в арбитратор рулевого управления подсистемы системы рулевого управления подсистемы 1. Кроме того, команда угла (Δ) шины и запрос о доступности (Δ_avb) угла шины выдаются от арбитратора подсистемы 2 арбитратору рулевого управления. Арбитратор рулевого управления проводит арбитраж среди входных данных для выдачи команды (Δ_out) угла шины и запроса доступности (Δ_avb) угла шины контроллеру рулевого управления. Контроллер рулевого управления управляет фактическим углом шины для выполнения входной команды (Δ_out) угла шины. Кроме того, арбитратор рулевого управления выдает арбитратору подсистемы 2 запрос об угле Δ шины.
Конфигурация управления интегрированной системы управления транспортным средством, описанная выше, и конфигурация управления программы, выполняемой в соответствующих подсистемах с конфигурацией их выполнения, будут описаны далее со ссылками на блок-схемы.
Фиг.6 соответствует конфигурации управления программы, образующей контроллер автомата постоянной скорости подсистемы 3.
На этапе (этап обозначен далее как S) 100 от арбитратора подсистемы 3 в контроллер автомата постоянной скорости подсистемы 3 поступает сигнал доступности Gx (Gx_avb). На этапе S110 контроллер автомата постоянной скорости генерирует запрос (Gx_ACC) управления автоматом постоянной скорости на основе входящих данных о доступности Gx (Gx_avb), информации об окружающей среде, совместно используемой информации и т.п. Генерируемый запрос (Gx_ACC) управления автоматом постоянной скорости выдается арбитратору подсистемы 3.
Фиг.7 соответствует конфигурации управления программы, выполняемой арбитратором подсистемы 3.
На этапе S200 запрос (Gx_ACC) управления автоматом постоянной скорости выдается от контроллера автомата постоянной скорости арбитратору подсистемы 3. На этапе S210 арбитратору подсистемы 3 выдается другой запрос (Gx запрос) управления. На этом этапе поступает запрос управления и т.п. от системы управления опережающего исключения столкновений.
На этапе S220 арбитратор подсистемы 3 принимает сигнал доступности Gx (Gx_avb) от арбитратора подсистемы 2. На этапе S230 арбитратор подсистемы 3 генерирует команду (Gx_sys1) Gx в процессе арбитража запроса (Gx_ACC) управления автоматом постоянной скорости и других запросов (запрос Gx) управления. На этом этапе процесс арбитража выполняется посредством определения приоритета запроса Gx от системы исключения столкновений.
Процесс генерирования запроса рулевого управления подсистемы 2 будет описан со ссылками на фиг.8.
На этапе S300 значения поперечного ускорения Gy транспортного средства и каждая доступность значения угловой скорости γ (Gy_avb, γ_avb) рыскания выдается от арбитратора подсистемы 2 модели рулевого управления водителем подсистемы 2. На этапе S310 модель рулевого управления водителем генерирует запрос (Gy_drv2, γ_drv) модели рулевого управления водителем с использованием модели водителя. Генерируемый запрос (Gy_drv2, γ_drv) модели рулевого управления водителем поступает арбитратору. Генерирование запроса рулевого управления в модели рулевого управления водителем, показанной на фиг.8, проводится программой, подобной программе модели продольного ускорения водителем, на основе рулевого управления. Поэтому детальное ее описание не будет повторено.
Фиг.9 соответствует конфигурации управления программы, выполняемой в арбитраторе подсистемы 2.
На этапе S400 от подсистемы 1 выдается команда Gx (Gx_sys1) арбитратору подсистемы 2. На этапе S410 запрос (Gx_drv1) модели продольного ускорения водителем на основе рулевого управления выдается арбитратору подсистемы 2. На этапе S420 запрос (Gy_drv2, γ_drv) модели рулевого управления водителем выдается моделью рулевого управления водителем арбитратору подсистемы 2.
На этапе S430 значения вращающего момента, тормозного момента и каждой доступности угла (τa_avb, τb_avb, Δ-_avb) шины выдаются соответствующими арбитраторами подсистемы 1 арбитратору подсистемы 2.
На этапе S440 арбитратор подсистемы 2 выполняет процесс арбитража между командой (Gx_sys1) Gx, запросом (Gx_drv1) модели продольного ускорения водителем и запросом (Gy_drv2, γ_drv) модели рулевого управления водителем и процесс операции стабилизации движения транспортного средства. Посредством этих процессов арбитража и операции стабилизации движения транспортного средства генерируются запрос (τa) вращающего момента, запрос тормозного момента (τb) и запрос угла (Δ) шины. Сгенерированный запрос (τa) вращающего момента выдается арбитратору вождения подсистемы 1. Сгенерированный запрос (τb) тормозного момента выдается арбитратору торможения подсистемы 1. Сгенерированный запрос угла (Δ) шины выдается арбитратору рулевого управления подсистемы 1.
Фиг.10 соответствует конфигурации управления программы, выполняемой арбитратором регулирования числа оборотов подсистемы 1.
На этапе S500 от соответствующих арбитраторов подсистемы 2 выдается сигнал доступности Gx (Gx_avb) арбитратору регулирования числа оборотов подсистемы 1. На этапе S510 арбитратору регулирования числа оборотов подсистемы 1 выдается запрос (Gx_drv3) базовой модели регулирования числа оборотов водителем. Он выдается арбитратору регулирования числа оборотов от базовой модели регулирования числа оборотов водителем подсистемы системы управления регулированием числа оборотов подсистемы 1.
На этапе S520 арбитратор регулирования числа оборотов подсистемы 1 генерирует запрос Gx (Gx_a) для выдачи соответствующим арбитраторам подсистемы 2.
На этапе S530 запрос (τa) вращающего момента выдается от подсистемы 2 арбитратору регулирования числа оборотов подсистемы 1. На этапе S540 арбитратор регулирования числа оборотов подсистемы 1 генерирует запрос (τa_out) для трансмиссии посредством процесса арбитража между запросом (Gx_drv3) базовой модели регулирования числа оборотов водителем и запросом (τa) вращающего момента от подсистемы 2. Сгенерированный запрос (τa_out) выдается в контроллер трансмиссии.
Фиг.11 соответствует конфигурации управления процесса генерирования запроса рулевого управления, выполняемого базовой моделью регулирования числа оборотов водителем подсистемы 1.
На этапе S600 выдается сигнал доступности Gx (Gx_avb) от арбитратора регулирования числа оборотов базовой модели регулирования числа оборотов водителем. На этапе S610 базовая модель регулирования числа оборотов водителем генерирует запрос (Gx_drv3) модели рулевого управления водителем с использованием входящего сигнала доступности Gx (Gx_avb). Сгенерированный запрос (Gx_drv3) модели рулевого управления водителем выдается арбитратору регулирования числа оборотов.
Фиг.12 соответствует конфигурации управления программы, выполняемой контроллером трансмиссии подсистемы 1.
На этапе S700 команда (τa_out) вращающего момента выдается от арбитратора регулирования числа оборотов контроллеру трансмиссии.
На этапе S710 арбитратор регулирования числа оборотов осуществляет управление для выполнения команды (τa_out) вращающего момента. На этом этапе контроллер трансмиссии управляет двигателем 140 и трансмиссией 140 таким образом, что выполняется команда (τa_out) вращающего момента. Интегрированная система управления транспортным средством, соответствующая данному варианту осуществления изобретения, включает в себя блок запроса, арбитражный блок и устройство вывода как элементы, составляющие подсистему. Кроме того, различная информация о транспортном средстве хранится как совместно используемая информация. Блок запроса вычисляет каждый запрос управления на основе совместно используемой информации. Арбитражный блок проводит арбитраж между запросами от множества блоков запроса и запросом от другой подсистемы для интегрирования запросов в конечном счете как один запрос. Устройство вывода приспособлено для обеспечения вывода к другой подсистеме на основе запроса от арбитражного блока. Информация, располагаемая в соответствующих модулях запроса, совместно используемая всей системой управления, хранится как совместно используемая информация. Функциональный блок, включающий в себя блок запроса, арбитражный блок и устройство вывода, представлен как подсистемы 1-3 (подсистема 1 дополнительно включает в себя 3 подсистемы, то есть подсистему системы регулирования числа оборотов, подсистему управления тормозной системой и подсистему управления системой рулевого управления). Все функциональные возможности осуществляются комбинацией подсистем. Каждая подсистема работает автономно, допуская работу ее собственной подсистемы благодаря передаче информации между арбитражными блоками.
На основании такой конфигурации добавление функции высокого уровня, такой как функция автоматического поддержания постоянной скорости, когда это требуется, может быть выполнена посредством лишь добавления подсистемы с такой функцией (без необходимости модифицирования существующей подсистемы). В частности, когда подсистема 3 для реализации системы автоматического поддержания постоянной скорости должна быть добавлена в дополнение к подсистемам 1 и 2, подсистема 3 может быть получена лишь посредством простого добавления, без изменения системной конфигурации подсистемы 1 и подсистемы 2. Другими словами, функциональность может быть улучшена с нарастанием.
В указанном выше случае областью, которую необходимо модифицировать в существующих подсистемах 1 и 2, может быть лишь арбитражный блок. На основании подсистемы, работающей автономно и децентрализованным образом, неисправность одной подсистемы не будет вызывать нарушение всех функций. Например, даже если функция подсистемы 3 и/или подсистемы 2 нарушена из-за неисправности или подобной причины, транспортное средство может устойчиво работать, пока подсистема 1 работает должным образом.
Кроме того, интегрированная система управления транспортным средством, соответствующая данному варианту осуществления изобретения, сформированная из подсистем, которые работают автономно и децентрализованно, имеет благоприятную родственность для децентрализации технологии управления. Децентрализованная технология управления относится к подходу реализации функции без ограничения физическим осуществлением функции. В интегрированной системе управления транспортным средством, соответствующей данному варианту осуществления изобретения, функциональная конфигурация расположения (функциональная архитектура) может быть модифицирована произвольно, вне установленного встроенного устройства управления на основании высокой степени независимости запроса, арбитража и вывода, а также высокой степени независимости между подсистемами. Больше нет необходимости принимать во внимание архитектуру, установленную с самого начала, и архитектуру можно изменять произвольно даже после того, как конфигурация аппаратного оборудования была определена. Например, посредством подключения блока запроса встроенного устройства управления к арбитражному блоку другого встроенного устройства управления и, кроме того, соединения с устройством вывода еще одного встроенного устройства управления может быть разработана подсистема с превышающим количеством встроенных устройств управления.
Информация передается соответственно между арбитраторами соответствующих подсистем. Предпочтительно обрабатывать информацию для общего использования соответствующими подсистемами. Соответственно не будет необходимости для каждого арбитратора соответствующих подсистем обрабатывать информацию для ее собственного арбитража.
Второй вариант осуществления изобретения
Интегрированная система управления транспортным средством, соответствующая второму варианту осуществления настоящего изобретения, будет описана далее со ссылками на фиг.13, соответствует конфигурации управления. Эта фиг.13 соответствует фиг.2.
Как показано на фиг.13, интегрированная система управления транспортным средством во втором варианте осуществления изобретения сформирована из трех основных блоков управления, то есть главной системы (1) управления в качестве блока управления системой регулирования числа оборотов, главной системы (2) управления как блока управления тормозной системой и главной системы (3) управления как блока управления системой рулевого управления.
В главной системе (1) управления, идентифицированной как блок управления системой регулирования числа оборотов, цель управления системой регулирования числа оборотов в соответствии с манипуляцией педалью акселератора генерируется с использованием базовой модели регулирования числа оборотов водителем на основе манипуляции педалью акселератора, которая является считываемым запросом водителя, посредством чего осуществляется управление приводом. В главной системе управления (1) проводится анализ входного сигнала от датчика считывания степени нажатия водителем на педаль акселератора с использованием базовой модели регулирования числа оборотов для вычисления целевого продольного ускорения Gx* (DRV0). Целевое продольное ускорение Gx* (DRV0) корректируется функциональным блоком коррекции на основе информации от консультационного блока. Кроме того, целевое продольное ускорение Gx* (DRV0) оценивается арбитражным функциональным блоком на основе информации от посреднического блока. Кроме того, вращающий момент и тормозной момент распределяются главной системой (2) управления, и вычисляется целевой вращающий момент τх* (DRV0) стороны регулирования числа оборотов. Кроме того, целевой вращающий момент τх* (DRV0) оценивается арбитражным функциональным блоком на основе информации от блока поддержки, и вычисляется целевой вращающий момент τx* (DRV). Осуществляется управление приводом 100 двигателя для получения этого целевого вращающего момента τx* (DRV).
В главной системе (2) управления, идентифицированной как блок управления тормозной системой, генерируется цель управления тормозной системой, соответствующая манипуляции педалью тормоза, с использованием базовой модели торможения водителем на основе манипуляции педалью тормоза, которая является считываемым запросом водителя, посредством чего осуществляется управление приводом.
В главной системе (2) управления осуществляется анализ входного сигнала от датчика для считывания степени нажатия на педаль тормоза водителем с использованием базовой модели торможения для вычисления целевого продольного ускорения Gx* (BRK0). В главной системе управления (2) осуществляется коррекция целевого продольного ускорения Gx* (BRK0) функциональным блоком коррекции на основе информации от посреднического блока. Кроме того, в главной системе (2) управления осуществляется арбитраж целевого продольного ускорения Gx* (BRK0) арбитражным функциональным блоком на основе информации от посреднического блока. Кроме того, в главной системе (2) управления вращающий момент и тормозной момент распределяются главной системой (1) управления, и вычисляется целевой тормозной момент τх* (BRK0) стороны торможения. Кроме того, осуществляется арбитраж целевого тормозного момента τх* (BRK0) арбитражным функциональным блоком на основе информации от блока поддержки, и вычисляется целевой тормозной момент τх* (BRK). Осуществляется управление приводом тормоза 560 для получения этого целевого тормозного момента τх* (BRK).
В главной системе (3) управления, идентифицированной как блок управления системой рулевого управления, генерируется цель управления системой рулевого управления, соответствующая манипуляции рулевым управлением, с использованием базовой модели рулевого управления водителем на основе манипуляции рулевым управлением, которая является считываемым запросом водителя, посредством чего осуществляется управление приводом.
В главной системе (3) управления осуществляется анализ входного сигнала от датчика, считывающего угол поворота водителем, с использованием базовой модели рулевого управления для вычисления целевого угла шины. Целевой угол шины корректируется функциональным блоком коррекции на основе информации от посреднического блока. Кроме того, осуществляется арбитраж целевого угла шины арбитражным функциональным блоком на основе информации от посреднического блока. Кроме того, осуществляется арбитраж целевого угла шины арбитражным функциональным блоком на основе информации от блока поддержки, посредством чего вычисляется целевой угол шины. Осуществляется управление приводами переднего рулевого устройства 500 и заднего рулевого устройства 520 для получения целевого угла шины.
Кроме того, данная интегрированная система управления транспортным средством включает в себя три блока обработки, параллельных главной системе (1) управления (блок управления системой регулирования числа оборотов), главной системе (2) управления (блок тормозной системы) и главной системе (3) управления (блок управления системой рулевого управления), действующих автономно. Первый блок обработки представляет собой консультационный блок с консультационной функцией. Второй блок обработки представляет собой посреднический блок с функцией посредника. Третий блок обработки представляет собой блок поддержки с функцией поддержки.
Консультационный блок генерирует и выдает соответствующим главным системам управления информацию, которая используется в соответствующих главных системах управления на основе информации об окружающей среде вокруг транспортного средства или информации, относящейся к водителю. Посреднический блок генерирует и выдает соответствующим главным системам управления информацию, которая используется в соответствующих главных системах управления для выполнения транспортным средством заданных действий. Блок поддержки генерирует и выдает соответствующим главным системам управления информацию, которая используется в соответствующих главных системах управления на основе текущего динамического состояния транспортного средства. В соответствующих главных системах управления выполняется определение того, должна ли такая входящая информация от консультационного блока, посреднического блока и блока поддержки (другая информация кроме запроса водителя) быть отражена на управлении движением транспортного средства, и до какой степени, если она должна быть отражена. Кроме того, осуществляется коррекция цели управления, и/или информация передается между соответствующими блоками управления. Поскольку каждая главная система управления работает автономно, управление приводом трансмиссии, приводом тормозного устройства и приводом рулевого устройства осуществляется, в конечном счете, в соответствующих блоках управления на основе конечной цели регулирования числа оборотов, цели торможения и цели рулевого управления, вычисленных на основе считываемой информации о манипуляциях водителя, входящей информации от консультационного блока, посреднического блока и блока поддержки и информации, переданной между соответствующими главными системами управления.
В частности, консультационный блок генерирует информацию, представляющую степень риска в отношении рабочих характеристик транспортного средства на основе коэффициента (значение μ) сцепления с дорожной поверхностью, по которой движется транспортное средство, температуры наружного воздуха и т.п., в качестве информации об окружающей среде вокруг транспортного средства, и/или генерирует информацию, представляющую степень риска в отношении манипуляции водителя, на основе уровня усталости водителя после съемки внешнего вида водителя. Информация, представляющая степень риска, выдается в каждую главную систему управления. Эта информация, представляющая степень риска, обрабатывается в консультационном блоке таким образом, что информация может использоваться в любой из главных систем управления. В каждой главной системе управления выполняется процесс для определения того, нужно ли отразить информацию, связанную со входящими данными о риске, для управления движением транспортного средства, в дополнение к запросу водителя от блока обработки, и до какой степени информация должна быть отражена и т.п.
В частности, посреднический блок генерирует информацию для выполнения функции автоматического поддержания постоянной скорости для автоматического управления транспортным средством. Информация для выполнения автоматической функции поддержания постоянной скорости выдается в каждую главную систему управления. В каждой главной системе управления выполняется процесс для определения того, нужно ли отразить входящую информацию для выполнения функции автоматического поддержания постоянной скорости в дополнение к запросу водителя от блока обработки, и до какой степени информация должна быть отражена и т.п.
Кроме того, предпочтительно блок поддержки идентифицирует текущее динамическое состояние транспортного средства и генерирует информацию для модификации целевого значения в каждой главной системе управления. Информация для модификации целевого значения выдается в каждую главную систему управления. В каждой главной системе управления выполняется процесс для определения того, нужно ли отразить входящую информацию для модификации целевого значения на основе динамического состояния для управления движением транспортного средства в дополнение к запросу водителя от блока обработки и до какой степени информация должна быть отражена и т.п.
Как показано на фиг.13, главные блоки управления главной системы (1) управления, главной системы (2) управления и главной системы (3) управления и блок поддержки консультационного блока, посреднического блока и блок поддержки - все конфигурированы для автономной работы. Главная система (1) управления обозначена как система РТ (трансмиссия). Главная система (2) управления обозначена как система ЕСВ (тормозная система с электронным управлением). Главная система управления (3) обозначена как система STR (система рулевого управления). Часть консультационного блока и часть посреднического блока обозначены как DSS (система поддержки вождения). Часть консультационного блока, часть посреднического блока и часть блока поддержки обозначены как система VDM (система управления динамикой транспортного средства).
На фиг.14-16 представлена конфигурация выполнения интегрированной системы управления транспортным средством, показанной на фиг.13. Фиг.14-16 соответствуют фиг.3-5 соответственно.
Интегрированная система управления транспортным средством, соответствующая настоящему изобретению, сформирована из множества подсистем, которые работают автономно и параллельно. Подсистемы включают в себя арбитражные блоки с соответствующими функциями арбитража. Фиг.1 и 13 относятся к различным конфигурациям управления. На фиг.3-5 показана другая конфигурация управления, отличающаяся арбитратором, по сравнению с фиг.14-16 соответственно. Каждая подсистема сформирована из блока запроса, генерирующего запрос системе регулирования числа оборотов, тормозной системе и системе рулевого управления транспортного средства на основе различной информации, арбитражного блока, оценивающего запросы, генерированные блоками запроса соответствующих подсистем, и устройства вывода для выдачи избранного целевого значения. Эти блоки запроса, арбитражные блоки и устройства вывода выполнены в форме программного модуля, реализованного на основе программного обеспечения.
На основе описанной выше конфигурации конфигурация управления, показанная на фиг.2, может быть модифицирована в конфигурацию управления, показанную на фиг.13, для получения другой конфигурации управления посредством лишь модификации арбитражного блока с использованием того же блока запроса и того же устройства вывода. В случае, когда функция управления подразделена в три секции блока запроса, арбитражного блока и устройства вывода в каждой подсистеме, стандарт для ее разделения надлежащим образом определяется во взаимно однозначном соответствии. Следует отметить, что возможность применения блока запроса и устройства вывода, в частности, может быть осуществлена в форме фиксированного функционального модуля, поскольку они имеют подобную функцию между различными подсистемами. Другими словами, существенная модификация в конфигурации управления, такая как модификация от конфигурации на фиг.2 до конфигурации на фиг.13, может быть приспособлена посредством модификации логики арбитражного блока и/или способа соединения арбитражных блоков друг с другом. Когда система скомпонована с модулем запроса, арбитражным блоком и устройством вывода, подразделенными надлежащим образом, любая последующая модификация может быть приспособлена посредством лишь модификации секции, относящейся к арбитражному блоку, такой как соединение и т.п. между арбитражными блоками. Таким образом, модификация системы может быть облегчена.
Хотя настоящее изобретение было описано и проиллюстрировано в деталях, понятно, что они даны только для иллюстрации и для примера и не должны рассматриваться как ограничение, при этом сущность и объем настоящего изобретения ограничивается только прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2004 |
|
RU2338653C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 2021 |
|
RU2754284C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 2019 |
|
RU2742314C1 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ | 2021 |
|
RU2765067C2 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ | 2019 |
|
RU2742459C2 |
| СИСТЕМА УПРАВЛЕНИЯ АВТОМОБИЛЕМ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2012 |
|
RU2575331C2 |
| ПРИБОР УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2381374C1 |
| СПОСОБ УПРАВЛЕНИЯ ИЗБЫТОЧНОСТЬЮ ДЛЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ, АВТОМАТИЧЕСКАЯ СИСТЕМА ВОЖДЕНИЯ, ТРАНСПОРТНОЕ СРЕДСТВО, КОНТРОЛЛЕР И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ ИНФОРМАЦИИ | 2020 |
|
RU2759453C1 |
| СИСТЕМА ПОДДЕРЖКИ РУЛЕВОГО УПРАВЛЕНИЯ | 2018 |
|
RU2685108C1 |
| АВТОМОБИЛЬНАЯ СИСТЕМА РЕКОМЕНДАЦИЙ ДЛЯ ВОДИТЕЛЯ | 2012 |
|
RU2599593C2 |
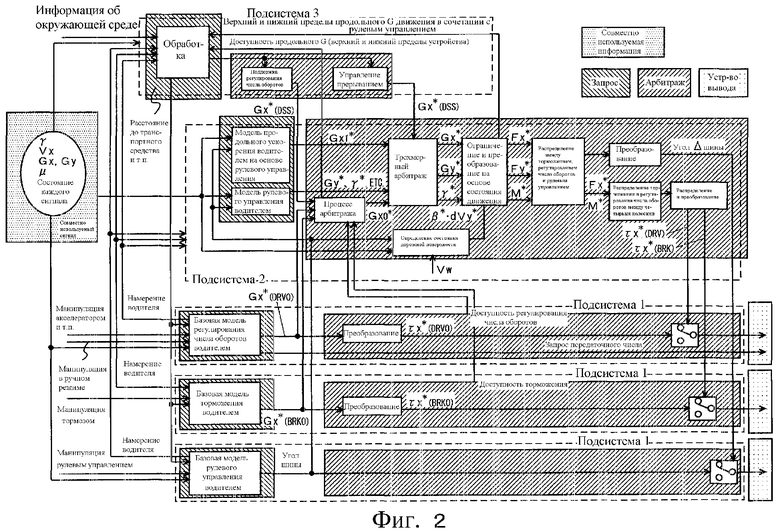
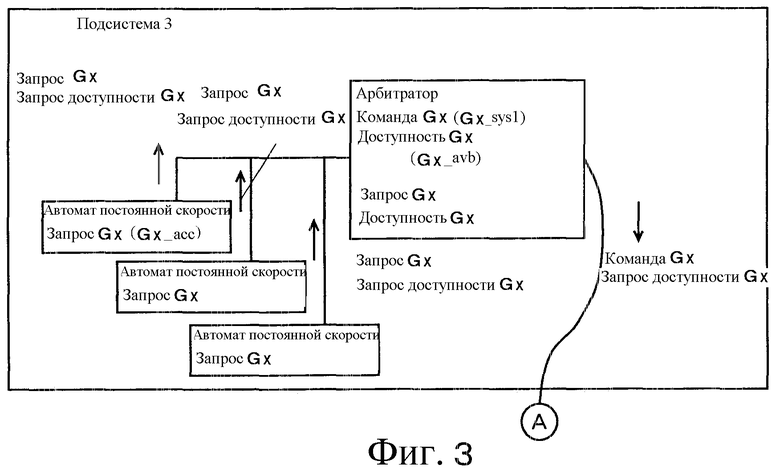
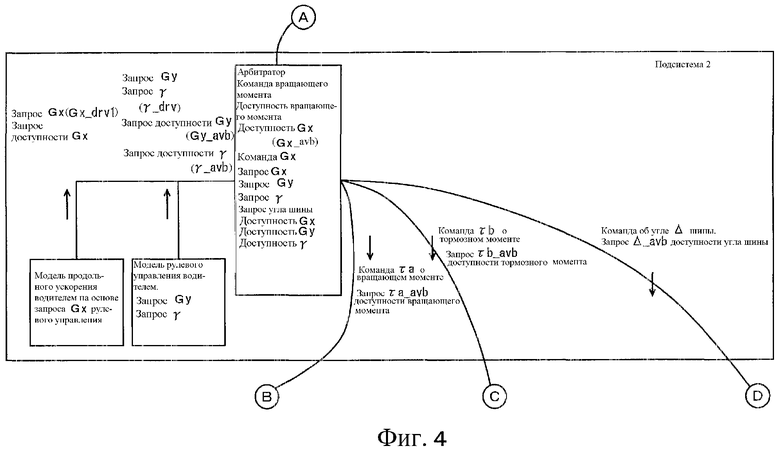
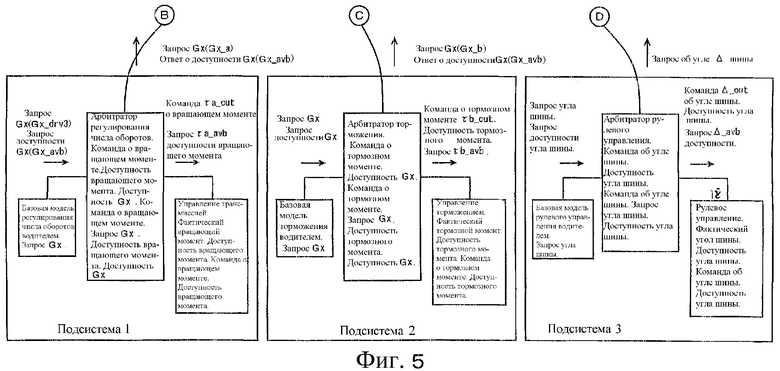

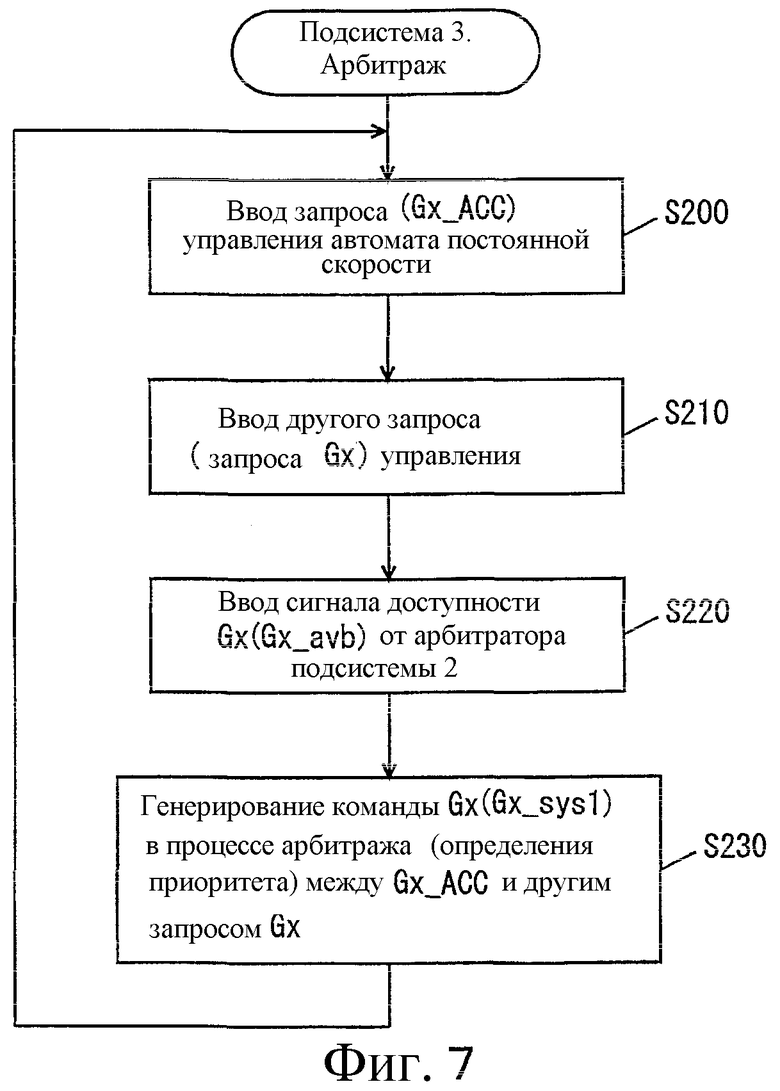

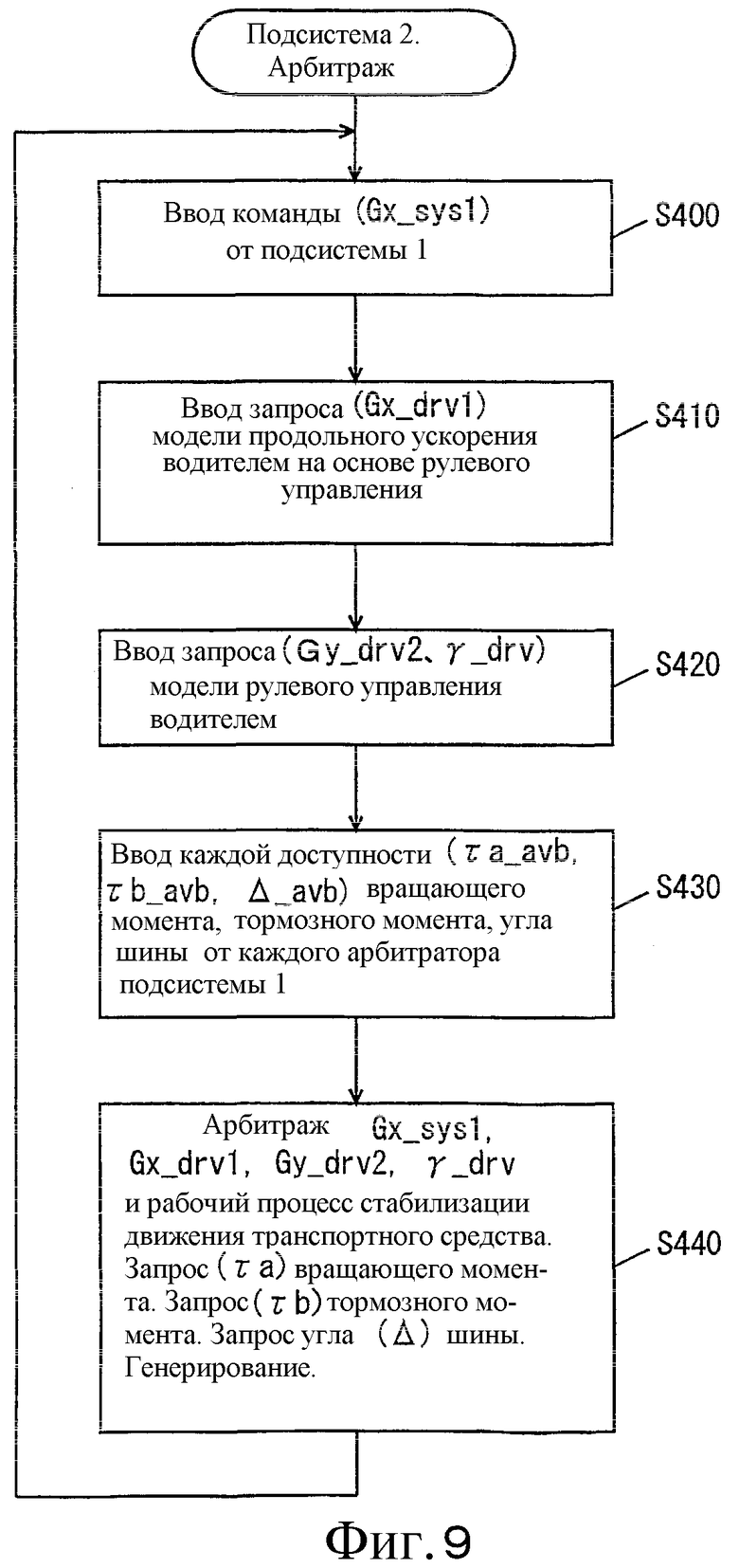
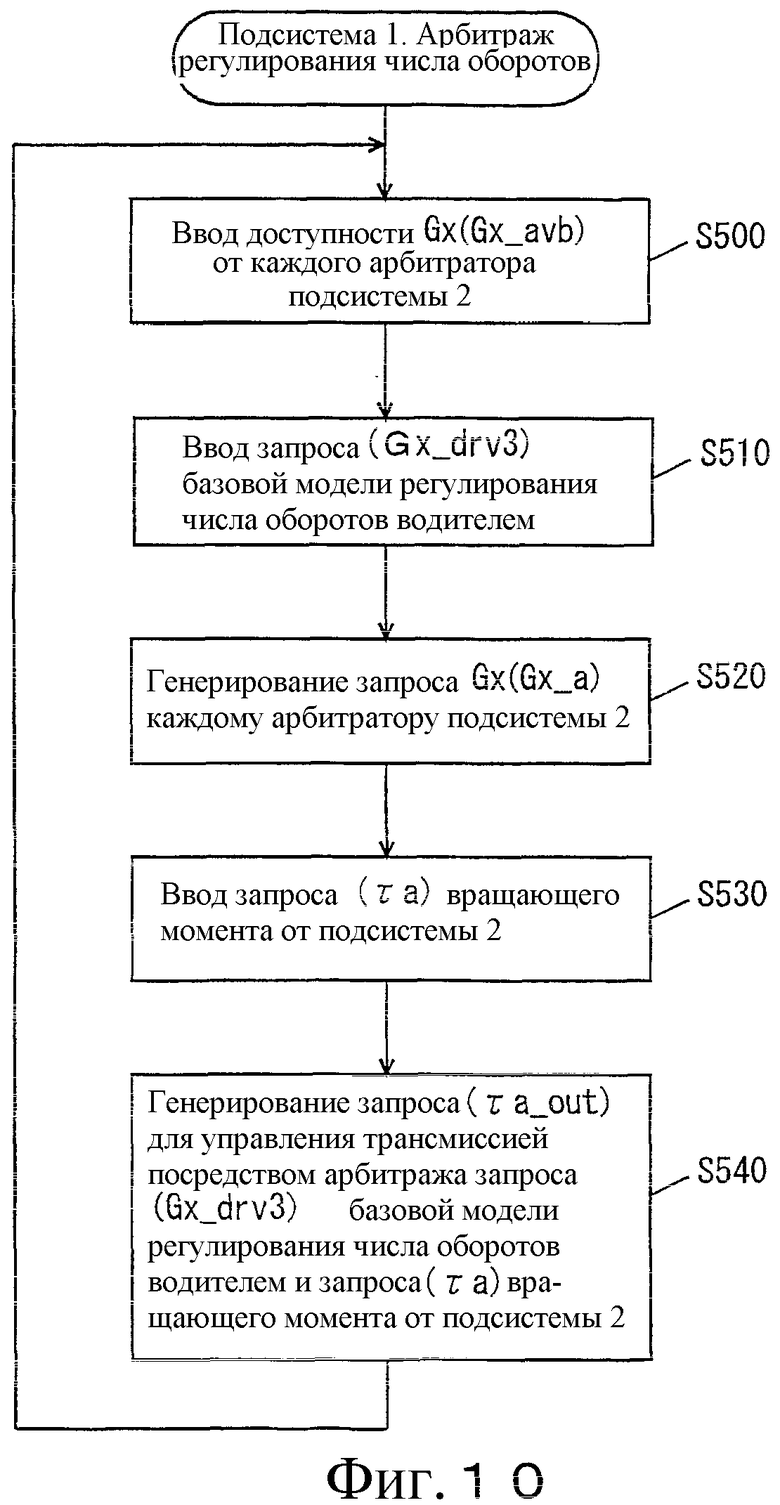
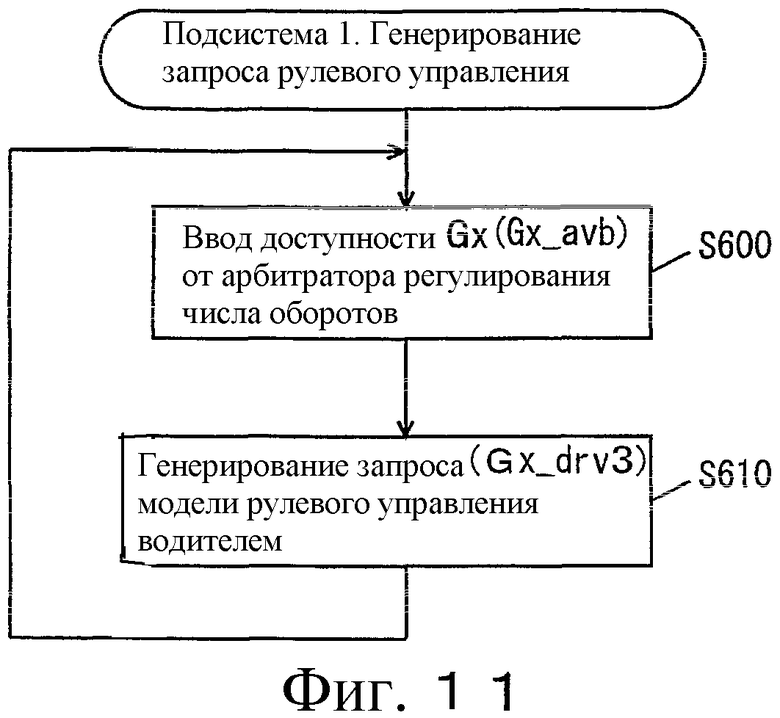
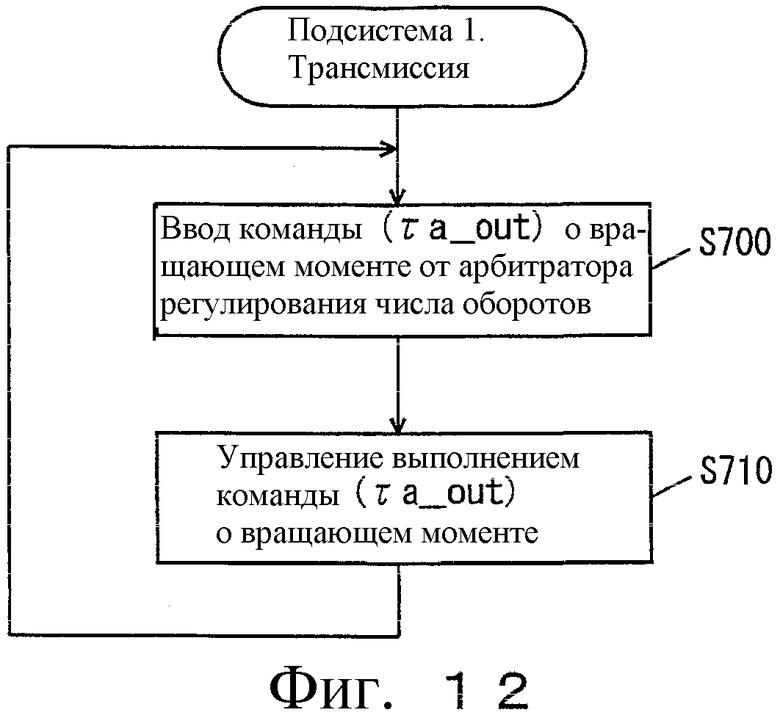

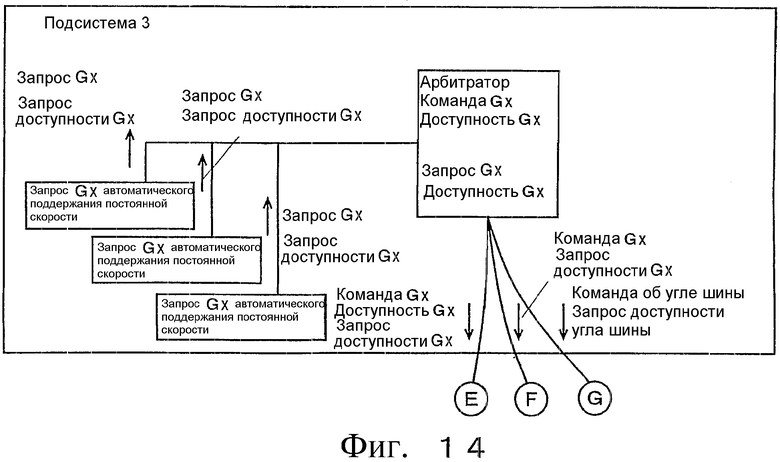
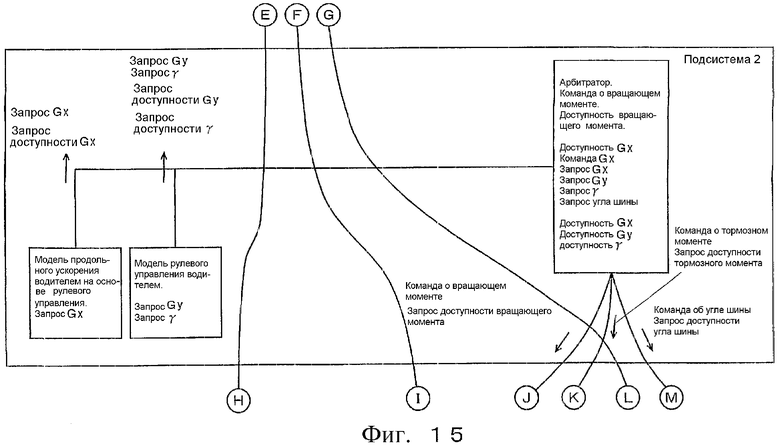

Изобретение относится к технике комбинированного управления функциональными узлами транспортных средств. Интегрированная система управления выполнена с подсистемой управления регулированием числа оборотов, управляющей системой регулирования числа оборотов, подсистемой управления тормозной системой, управляющей тормозной системой и подсистемой управления системой рулевого управления, управляющей системой рулевого управления. Имеются подсистема стабилизации текущего динамического состояния транспортного средства, подсистема выполнения функции поддержки вождения, такая как подсистема автоматического поддержания постоянной скорости, и запоминающее устройство для сохранения совместно используемых сигналов. Каждая подсистема включает в себя блок запроса, арбитражный блок и устройство вывода. Интегрированная система управления характеризуется повышенной отказоустойчивостью и может быть легко приспособлена к добавлению функции управления транспортным средством. 6 з.п. ф-лы, 16 ил.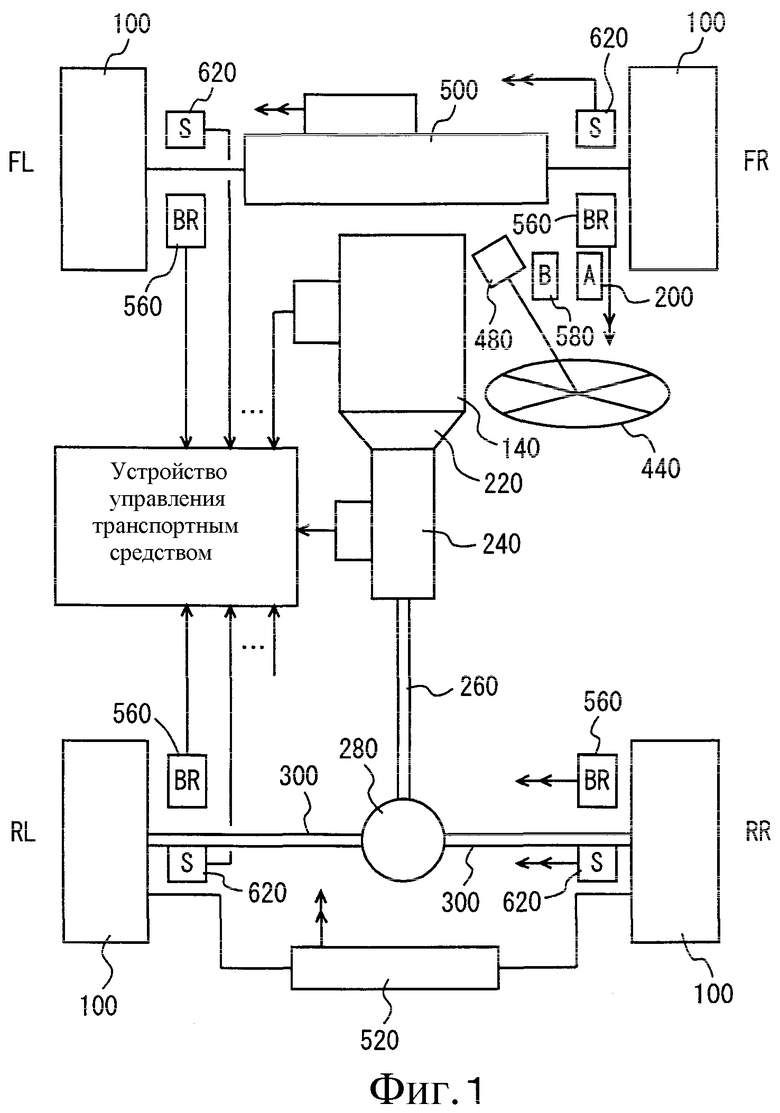
средство считывания для считывания и сохранения информации, относящейся к состоянию транспортного средства,
причем первая подсистема из упомянутых подсистем обеспечивает основную функцию управления и содержит:
первое средство запроса для вычисления первого параметра управления, основываясь, по меньшей мере, частично на считанной информации, принятой от средства считывания,
первое средство арбитража для проведения процесса арбитража упомянутого первого параметра управления, принятого от упомянутого первого средства запроса, и, по меньшей мере, второго параметра управления, принятого от второго средства арбитража второй подсистемы из упомянутых подсистем, и
средство вывода для управления приводом транспортного средства на основе результата арбитража упомянутого первого средства арбитража,
причем упомянутая вторая подсистема обеспечивает дополнительную функцию управления и содержит:
второе средство запроса для вычисления третьего параметра управления, основываясь, по меньшей мере, частично на считанной информации, принятой от средства считывания, и
упомянутое второе средство арбитража для проведения процесса арбитража упомянутого третьего параметра управления и, по меньшей мере, четвертого параметра управления, принятого от третьего средства арбитража третьей подсистемы из упомянутых подсистем, для вывода второго параметра управления на первое средство арбитража упомянутой первой подсистемы,
при этом упомянутая третья подсистема обеспечивает дополнительную функцию управления и содержит:
третье средство запроса для вычисления пятого параметра управления, основываясь, по меньшей мере, частично на считанной информации, принятой от средства считывания, и
упомянутое третье средство арбитража для проведения процесса арбитража упомянутого пятого параметра управления, принятого от третьего средства запроса, для вывода четвертого параметра управления на второе средство арбитража упомянутой второй подсистемы.
каждая из подсистемы управления системой регулирования числа оборотов, подсистемы управления тормозной системой и подсистемы управления системой рулевого управления независимо содержит упомянутое первое средство запроса, упомянутое первое средство арбитража и упомянутое средство вывода.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| УСТРОЙСТВО С ДВЕРНЫМИ ПОЛОТНОМ И ШАРНИРАМИ, А ТАКЖЕ ДУШЕВАЯ КАБИНА С ТАКИМ УСТРОЙСТВОМ | 2003 |
|
RU2318106C2 |
| US 5991669 A, 23.11.1999 | |||
| СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2104883C1 |

