Изобретение относится к военной технике и может быть использовано в пулеметах, автоматических пушках и гранатометах для дистанционного электромеханического и ручного отведения затвора оружия при перезарядке и для дистанционной электромеханической или ручной фиксации оружия в транспортном (походном) положении.
Известен механизм ручной перезарядки пулемета, установленного в боевой машине пехоты [1], который состоит из ручки, подсоединенной через тягу и вилку к рукоятке перезарядки пулемета.
Недостаток ручного механизма перезарядки (взведения) - невозможность дистанционной перезарядки пулемета при размещении его в необитаемом боевом модуле или труднодоступных местах боевых отделений.
Известна 30-мм автоматическая пушка 2А42, установленная в башне боевой машины пехоты БМП-2 [2, 3]. Пушка имеет механизм пироперезарядки для дистанционного перемещения подвижных частей и состоит из кассеты для размещения пиропатронов. Для запирания патронников кассеты и подвода тока к электрокапсюльным втулкам пиропатронов служит контактор. При срабатывании пиропатрона пороховые газы поступают в газовый цилиндр агрегата ствола, воздействуют на поршень затворной рамы и перемещают ее в заднее положение.
Недостаток механизма пироперезарядки:
- ограничение количества циклов перезарядки автоматической пушки количеством пиропатронов в кассете;
- необходимость применения в системе управления огнем (далее по тексту - СУО) дополнительной электрической схемы для управления поджигом пиропатронов.
Известен механизм перезарядки стрелкового оружия (патент RU 2542680 C1, F41A 7/02, F41A 7/06), выбранный в качестве прототипа.
Механизм перезарядки выполнен в виде направляющей, установленной при помощи трех кронштейнов на постели пулемета, по которой передвигается поводок, соединенный с рукояткой взведения затвора оружия. Поводок передвигается при помощи электрического механизма поступательного действия, который соединен с ним тросом через ролики.
Недостатками механизма перезарядки стрелкового оружия являются:
- электрический механизм установлен на постель, что увеличивает габариты постели, ее массу, момент инерции и не позволяет обеспечить возможность ручной (аварийной) перезарядки (взведения) оружия;
- необходимость применения в системе управления оружием дополнительной электрической схемы для управления электродвигателем механизма взвода (перезарядки);
- увеличенное время взведения оружия из-за ограниченной мощности электродвигателя механизма перезарядки.
Техническими задачами заявляемого изобретения являются:
- обеспечение возможности дистанционного электромеханического и ручного взведения оружия;
- исключение из состава системы управления оружием и СУО отдельного электрического механизма поступательного действия и электрической схемы управления его электроприводом, обеспечивающих перезарядку и взведение оружия;
- уменьшение габаритов и массы (момента инерции) механизма взведения оружия, а соответственно, и системы управления оружием;
- повышение надежности работы механизма взведения (перезарядки) оружия и увеличение ресурса системы управления оружием в целом;
- повышение удобства при выполнении ручного взведения оружия.
Для достижения обеспечиваемого изобретением технического результата в известный механизм взведения оружия, содержащий трос, одним концом закрепленный на поводке, механически связанном с затвором оружия, ролики, закрепленные на постели оружия, возвратную пружину поводка, механически связывающую поводок с постелью, жестко связанной с выходным валом привода вертикального наведения, установленного на основании, неподвижном относительно постели, отличающийся тем, что в него дополнительно введены электромеханизм фиксации со штоком, установленный на основании, неподвижном относительно постели, рычаг взведения с отверстием под заход штока электромеханизма фиксации, обеспечивающий возможность жесткой фиксации рычага взведения относительно основания, пружина фиксации рычага взведения, механически связывающая рычаг взведения и постель с оружием, рычаг постели, жестко связанный с постелью и имеющий отверстие под заход штока электромеханизма фиксации, обеспечивающий возможность жесткой фиксации постели с оружием относительно основания, рукоятка ручного взведения, установленная на рычаге взведения и обеспечивающая взведение оружия вручную при фиксации постели относительно основания штоком электромеханизма фиксации, при этом второй конец троса через ролики механически связан с рычагом взведения.
Сопоставительный анализ с прототипом показывает, что заявляемый механизм взведения оружия отличается отсутствием избыточного элемента -электрического механизма поступательного действия, увеличивающего суммарный габарит приборов и узлов, размещаемых на постели, и снижающего надежность, отличается наличием новых элементов (электромеханизм фиксации со штоком, рычаг взведения с рукояткой ручного взведения, пружины фиксации рычага взведения, рычаг постели) и их связями с другими элементами оружия и другими элементами системы управления оружием.
Работа механизма взведения оружия осуществляется с использованием имеющегося (в составе системы управления оружием) привода вертикального наведения оружия и дополнительно введенного электромеханизма фиксации оружия (являющимся общим одновременно для механизма взведения оружия и системы управления оружием), установленными отдельно на основании и выполняющим задачу стопорения постели с оружием в транспортном положении и взведения оружия.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но при их введении в указанной связи в механизм взведения оружием позволяет:
- обеспечить возможность дистанционного электромеханического взведения оружия, за счет использования в механизме взведения оружия рычага взведения, пружины фиксации рычага взведения, а также использования уже имеющегося в составе системы управления оружием привода вертикального наведения при фиксации электромеханизмом фиксации рычага взведения относительно основания;
- обеспечить возможность ручного взведения оружия, в т.ч. при выключенной системе управления оружием, при помощи рукоятки ручного взведения, рычага взведения при фиксации электромеханизмом фиксации постели (транспортное, походное положение оружия) относительно основания;
- исключить необходимость применения в системе управления оружием отдельного электрического механизма поступательного действия для взведения (перезарядки), за счет использования имеющегося в составе системы управления оружием привода вертикального наведения оружия и электромеханизма фиксации оружия в транспортном (походном) положении;
- уменьшить габариты и соответственно массу (момент инерции) механизма взведения оружия, а соответственно, и системы управления оружием, за счет исключения электрического механизма поступательного действия, используемого для взведения оружия;
- повысить надежность работы механизма взведения (перезарядки) оружия и увеличить ресурс системы управления оружием в целом, за счет исключения дополнительных электромеханических узлов и электрических схем управления ими;
- повысить удобство работы при выполнении ручного взведения оружия, за счет применения в механизме взведения рычага с рукояткой ручного взведения.
Устройство и работа заявляемого изобретения поясняются графическими материалами.
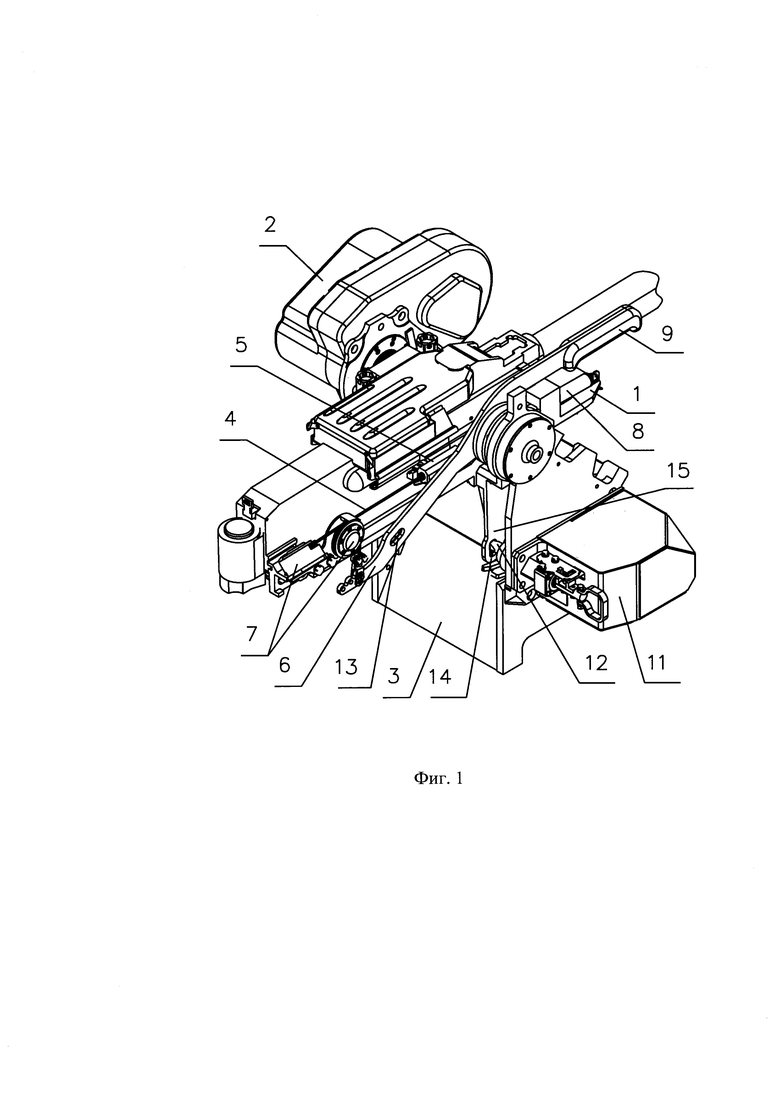
На Фиг. 1 приведен общий вид механизма взведения оружия в составе механизмов управления оружием;
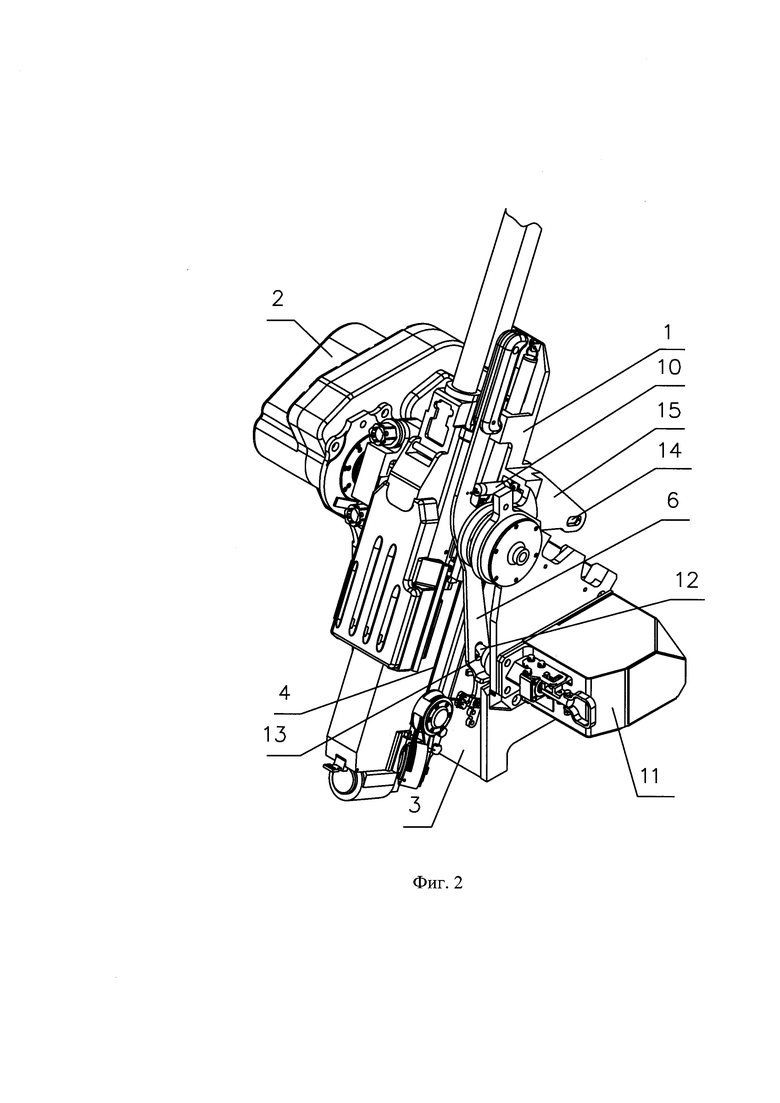
На Фиг. 2 изображено положение подвижных частей механизма взведения при начале дистанционного электромеханического взведения затвора оружия;
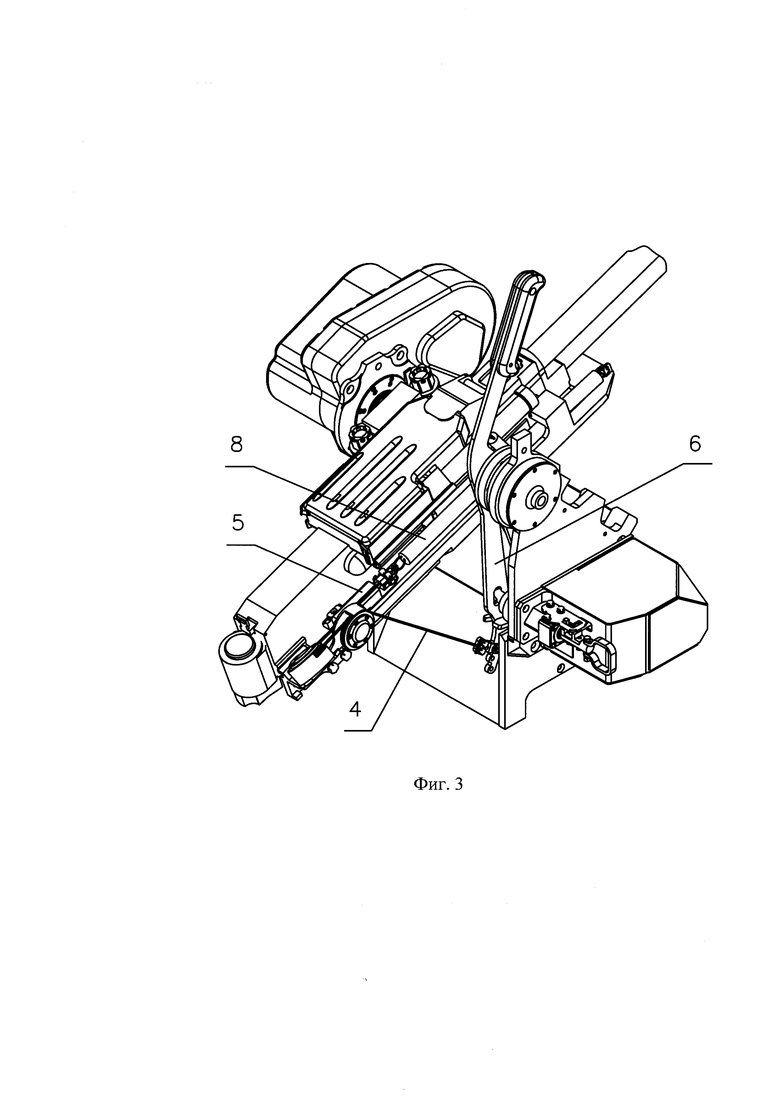
На Фиг. 3 изображено положение подвижных частей механизма взведения в момент установки оружия на боевой взвод при дистанционном электромеханическом взведении;
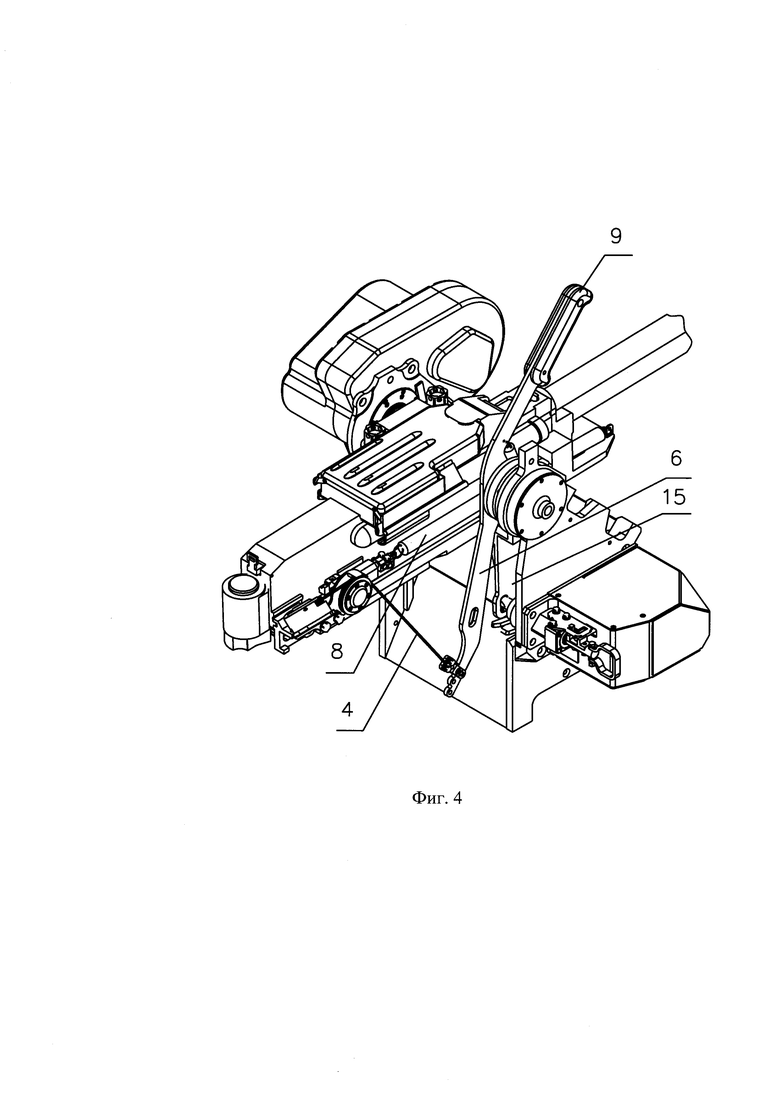
На Фиг. 4 изображено положение подвижных частей механизма взведения при ручном взведении затвора оружия.
Механизм взведения оружия (фиг. 1), установленный на постели оружия 1, жестко связанной с выходным валом привода вертикального наведения 2 системы управления оружием, установленного на основании 3, неподвижном относительно постели оружия 1, состоит из троса 4, один конец которого закреплен на поводке 5, а другой конец закреплен с возможностью регулировки длины троса на конце рычага взведения 6, обеспечивающей выставку положения поводка 5 относительно конца рычага взведения 6.
Для изменения направления перемещения трос проходит через ролики 7, установленные на постели 1. Поводок 5 укреплен на затворе оружия (на фиг. не показан).
Поводок 5 с помощью возвратной пружины 8 фиксируется относительно постели 1 в начальном положении. Рычаг взведения 6 имеет возможность поворачиваться вокруг оси вертикального наведения.
На другом (противоположном месту заделки троса 4) конце рычага взведения 6 находится рукоятка ручного взведения 9 и пружина фиксации 10 (фиг. 2), связывающая рычаг взведения 6 с постелью оружия 1 и обеспечивающая удержание рычага взведения 6 в исходном положении.
Электромеханизм фиксации 11 с электрическим и ручным управлением установлен отдельно на основании 3, неподвижном относительно постели оружия 1, и является общим одновременно для механизма взведения оружия и системы управления оружием. Электромеханизм фиксации 11 обеспечивает выдвигание штока 12, который входит в отверстие 13 рычага взведения 6 для обеспечения жесткой фиксации рычага взведения 6 относительно основания 3 или в отверстие 14 рычага постели 15, жестко связанного с постелью оружия 1, для обеспечения жесткой фиксации постели 1 относительно основания 3.
Механизм взведения оружия при выполнении дистанционного электромеханического взведения работает следующим образом (фиг. 2):
Привод вертикального наведения 2 системы управления оружием относительно основания 3 поворачивает постель 1 с рычагом взведения 6 до совмещения отверстия 13 рычага взведения 6 со штоком 12 электромеханизма фиксации 11. При этом пружина фиксации 10 удерживает рычаг взведения 6 на упоре постели 1. Затем электромеханизм фиксации 11 заводит шток 12 в отверстие 13 рычага взведения 6. После фиксации рычага взведения 6 (обеспечения жесткой механической связи рычага взведения 6 с основанием 3), привод вертикального наведения 2 относительно неподвижного (зафиксированного на основании 3) рычага взведения 6, поворачивает постель 1 стволом оружия вниз, при этом, трос 4 перемещает поводок 5 с затвором оружия до его взвода (фиг. 3).
Затем электромеханизм фиксации 11 отпускает рычаг взведения 6 (шток 12 электромеханизма фиксации 11 выводится из отверстия 13 рычага взведения 6), при этом возвратная пружина 8 возвращает поводок 5 с затвором оружия в начальное положение. Оружие остается на боевом взводе (фиг. 1).
Таким образом, фиксация штоком электромеханизма фиксации рычага взведения при последующем управлении приводом вертикального наведения, за счет преобразования углового перемещения постели с оружием в вертикальной плоскости в поступательное перемещение поводка, обеспечивает дистанционное электромеханическое взведение оружия.
Для фиксации оружия в транспортном положении (фиг. 1) привод вертикального наведения 2 системы управления оружием поворачивает постель 1 до совмещения отверстия 14 рычага постели 15 со штоком 12 электромеханизма фиксации 11. Затем электромеханизм фиксации 11 заводит шток 12 в отверстие 14 рычага постели 15.
Механизм взведения оружия при выполнении ручного взведения работает следующим образом (фиг. 4):
Оператор поворачивает рычаг взведения 6 за рукоятку ручного взведения 9 относительно постели 1 (предварительно зафиксированной посредством электромеханизма фиксации 11 в транспортном положении), при этом трос 4 перемещает поводок 5 с затвором оружия до его взвода. По окончании взведения возвратная пружина 8 возвращает рычаг взведения 6, поводок 5 и затвор оружия в начальное положение. Оружие остается на боевом взводе (фиг. 1).
Таким образом, фиксация штоком электромеханизма фиксации рычага постели и последующее ручное воздействие на рукоятку ручного взведения, за счет преобразования углового перемещения рычага взведения в поступательное перемещение поводка, обеспечивает ручное взведение оружия.
В результате, предложенное техническое решение позволяет обеспечить:
- возможность дистанционного электромеханического и ручного взведения оружия;
- исключение из состава системы управления оружием отдельного электрического механизма поступательного действия для выполнения дистанционного взведения (перезарядки);
- уменьшение габаритов и массы (момент инерции) механизма взведения оружия, а соответственно, и системы управления оружием;
- повышение надежности работы механизма взведения (перезарядки) оружия и увеличение ресурса системы управления оружием в целом;
- повышение удобства при выполнении ручного взведения оружия.
Приведенные в описании технические преимущества, целесообразность и надежность механизма взведения оружия, реализованные по заявляемой схеме, подтверждены положительными испытаниями опытных образцов:
- дистанционной пулеметной установки с пулеметом «Корд» калибра 12,7 мм на модернизированном танке типа Т-72 по теме «Модернизация Т-72»;
- дистанционной пулеметной установки с пулеметом «Корд» калибра 12,7 мм в составе бронеавтомобиля «Тигр» по теме «НИМР-ДПУ».
Источники литературы
1. Боевая машина пехоты БМП-2. Техническое описание и инструкция по эксплуатации, часть 1, М., Военное издательство, 1987 г.
2. Боевая машина пехоты БМП-2. Техническое описание и инструкция по эксплуатации, часть 1, М., Военное издательство, 1987 г.),
3. Каргин Н.И., «30 мм автоматическая пушка 2А42». Учебное пособие., Рязань: Рязанское высшее воздушно-десантное дважды Краснознаменное училище имени В.Ф. Маргелова, 1998 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ВЗВЕДЕНИЯ ОРУЖИЯ | 2024 |
|
RU2828773C1 |
| МЕХАНИЗМ ПЕРЕЗАРЯДКИ СТРЕЛКОВОГО ОРУЖИЯ | 2013 |
|
RU2542680C1 |
| Механизм перезарядки стрелкового оружия | 2018 |
|
RU2704648C1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО ПЕРЕЗАРЯЖАНИЯ АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 2001 |
|
RU2202085C1 |
| ОРУЖЕЙНАЯ УСТАНОВКА | 2009 |
|
RU2419056C1 |
| Система управления спусковыми механизмами пушек комплекса вооружения | 2020 |
|
RU2752111C1 |
| Система спуска-стопорения оружейной установки | 2016 |
|
RU2626786C1 |
| Механизм взведения подвижных частей автоматической пушки | 2018 |
|
RU2689899C1 |
| МЕХАНИЗМ РУЧНОЙ ПЕРЕЗАРЯДКИ ГРАНАТОМЕТА | 2009 |
|
RU2426967C1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО ПЕРЕЗАРЯЖАНИЯ АВТОМАТИЧЕСКОГО ГРАНАТОМЁТА | 2003 |
|
RU2247915C1 |
Механизм взведения оружия содержит трос, одним концом закрепленный на поводке, механически связанном с затвором оружия, ролики, закрепленные на постели оружия, возвратную пружину поводка, механически связывающую поводок с постелью, жестко связанной с выходным валом привода вертикального наведения, установленного на основании, неподвижном относительно постели, электромеханизм фиксации со штоком, установленный на основании, неподвижном относительно постели, рычаг взведения с отверстием под заход штока электромеханизма фиксации, обеспечивающий возможность жесткой фиксации рычага взведения относительно основания. Пружина фиксации рычага взведения механически связывает рычаг взведения и постель с оружием. Рычаг постели, жестко связанный с постелью, имеет отверстие под заход штока электромеханизма фиксации, который обеспечивает возможность жесткой фиксации постели с оружием относительно основания. Рукоятка ручного взведения, установленная на рычаге взведения, обеспечивает взведение оружия вручную при фиксации постели относительно основания штоком электромеханизма фиксации, при этом второй конец троса через ролики механически связан с рычагом взведения. Технический результат - обеспечение дистанционного электромеханического и ручного взведения оружия, уменьшение габаритов и массы механизма взведения оружия, повышение надежности работы механизма взведения оружия и увеличение ресурса системы управления оружием в целом, повышение удобства при выполнении ручного взведения оружия. 4 ил.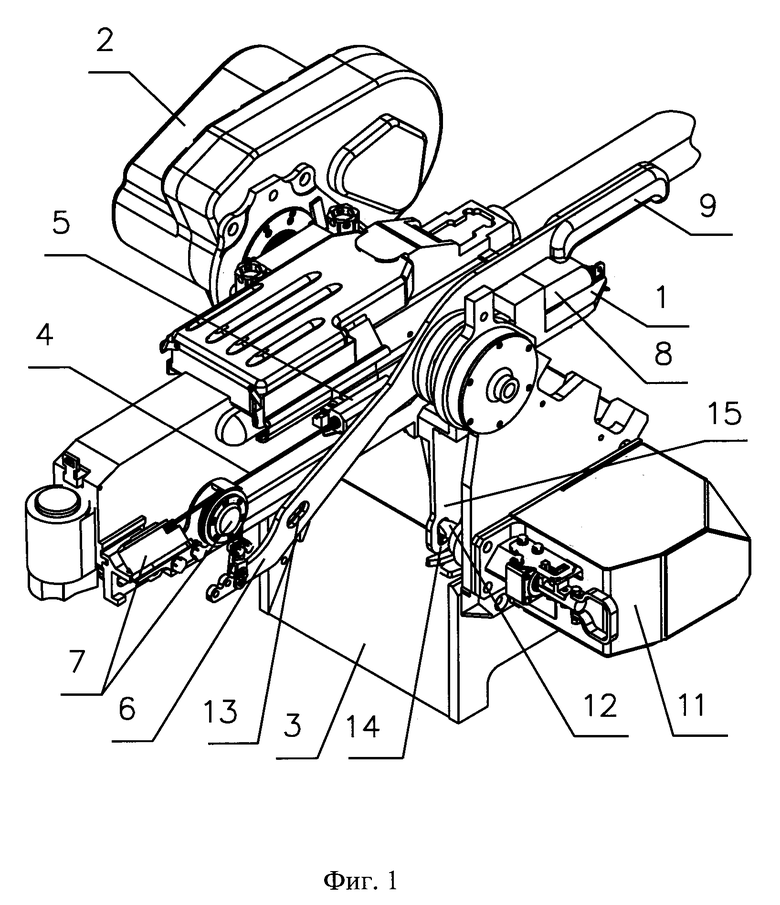
Механизм взведения оружия, содержащий трос, одним концом закрепленный на поводке, механически связанном с затвором оружия, ролики, закрепленные на постели оружия, возвратную пружину поводка, механически связывающую поводок с постелью, жестко связанной с выходным валом привода вертикального наведения, установленного на основании, неподвижном относительно постели, отличающийся тем, что в него дополнительно введены электромеханизм фиксации со штоком, установленный на основании, неподвижном относительно постели, рычаг взведения с отверстием под заход штока электромеханизма фиксации, обеспечивающий возможность жесткой фиксации рычага взведения относительно основания, пружина фиксации рычага взведения, механически связывающая рычаг взведения и постель с оружием, рычаг постели, жестко связанный с постелью и имеющий отверстие под заход штока электромеханизма фиксации, обеспечивающий возможность жесткой фиксации постели с оружием относительно основания, рукоятка ручного взведения, установленная на рычаге взведения и обеспечивающая взведение оружия вручную при фиксации постели относительно основания штоком электромеханизма фиксации, при этом второй конец троса через ролики механически связан с рычагом взведения.
| МЕХАНИЗМ ПЕРЕЗАРЯДКИ СТРЕЛКОВОГО ОРУЖИЯ | 2013 |
|
RU2542680C1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО ВЗВЕДЕНИЯ ОРУЖИЯ | 2010 |
|
RU2422746C1 |
| МЕХАНИЗМ РУЧНОЙ ПЕРЕЗАРЯДКИ ГРАНАТОМЕТА | 2009 |
|
RU2426967C1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО ВЗВЕДЕНИЯ АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 1993 |
|
RU2102675C1 |
| УСТРОЙСТВО ДЛЯ ДУГОВОЙ ДИФФЕРЕНЦИАЛЬНОЙ ЗАЩИТЫ КОМПЛЕКТНОГО РАСПРЕДЕЛИТЕЛЬНОГО УСТРОЙСТВА | 1992 |
|
RU2020687C1 |

