Изобретение относится к военной технике, к стрелково-пушечным установкам, управление стрельбой которых осуществляется дистанционно.
Известна система управления спусковыми механизмами пушек боевой машины, описанная в патенте на изобретение RU №2553502 от 20.05.2015 г. Она содержит ствольную коробку, закрепленную с помощью фланца на броневой маске башни боевой машины, агрегат ствола и затыльник с размещенными на нем поводком механизма переключения подачи и ручкой предохранителя. В конструкцию пушки дополнительно введены привод механизма переключения подачи и привод предохранителя, установленные на затыльнике. Привод механизма переключения подачи выполнен в виде понижающего редуктора с электродвигателем и зубчатой предохранительной муфтой. Выходная шестерня редуктора сцеплена с поводком, а привод предохранителя состоит из электромеханизма поступательного, шток которого сцеплен с движком, взаимодействующим с ручкой предохранителя пушки.
Недостаток данного технического решения - низкая живучесть приводов из-за размещения их непосредственно на агрегатах пушки, испытывающих большие перегрузки при стрельбе.
Известна система управления спусковыми механизмами пушек боевой машины, описанная в патенте на изобретение RU №2342621 от 27.12.2008 г. Данная система включает подъемный механизм орудия и поворотный механизм башни, содержащие червячные редукторы и рукоятки ручного наведения, установленные на кронштейне, закрепленным на башне. При этом оси червячных редукторов подъемного и поворотного механизмов и рукоятки снабжены шестернями, каждая из которых кинематически связана с двумя колесами. Одно из колес каждого механизма соответствующей рукояткой соединено с гибким валом, закручиваемым при рабочем вращении по часовой стрелке. Другие колеса соединены друг с другом гибким валом, закручиваемым при рабочем вращении против часовой стрелки. Гибкие валы установлены с предварительным закручиванием в направлении рабочего вращения.
Недостаток данной системы - небольшой крутящий момент, передаваемый гибким валом, что ограничивает область его применения.
В качестве прототипа заявляемого решения нами выбрана система управления спусковыми механизмами пушек 23-мм спаренной установки ЗУ-23 (23-мм спаренная установка ЗУ-23. Руководство службы. Военное издательство МО СССР. Москва, 1961 г.). Данная система состоит из рукоятки ручного управления, соединенной с приводом, установленным на неподвижной части установки, который посредством рычагов взаимодействует с подпружиненным толкателем с рычагами спуска. При этом толкатель связан со спусковым механизмом пушки, размещенным на подвижной части установки.
При этом привод выполнен в виде ножной педали спуска с предохранителем, рычага, рычага спуска, рукоятки спуска, предохранителя, тяги, пружины и дуги спуска. При нажатии на педаль спуска поворачивается рычаг и рычаг спуска, который нажимает на ролик дуги, дуга действует на ролик рычага, расположенного на люльке, и поворачивает валик. Укрепленные на валике рычаг и регулировочная муфта своими выступами поворачивают рычаги, действующие на ролики планок спусковых механизмов пушек.
Недостаток данной системы управления - большие габаритные размеры рабочих зон, в которых осуществляется перемещение составных элементов системы.
Задачей предлагаемого изобретения является повышение безопасности комплекса вооружения за счет электромеханической системы дистанционного управления спусковыми механизмами нескольких пушек одновременно и уменьшение габаритов системы.
Поставленная задача решается системой управления спусковыми механизмами пушек комплекса вооружения, состоящим из рукоятки ручного управления, соединенной с приводом, установленным на неподвижной части комплекса вооружения, который посредством рычагов взаимодействует с подпружиненным толкателем с рычагами спуска, и который связан со спусковым механизмом пушки, установленной на подвижной части комплекса. При этом новым является то, что привод выполнен в виде червячного редуктора, на червячном колесе которого установлен винт с поводком, таким образом, что его верхняя часть взаимодействует с рукояткой ручного управления, а нижняя часть с рычагами привода посредством ползуна, при этом каждый рычаг привода шарнирно соединен со стержнем, каждый из которых взаимодействует с подпружиненной тягой, установленной в зоне перехода неподвижной части комплекса к подвижной качающейся части, и которая взаимодействует с подпружиненным толкателем с рычагами спуска, также рычаги спуска закреплены на подпружиненном упоре, который взаимодействует с шепталом спускового механизма пушки. Стержень взаимодействует с подпружиненным толкателем посредством поворотной серьги, установленной на неподвижной части комплекса. Рычаги привода соединены с ползуном посредством шарнира.
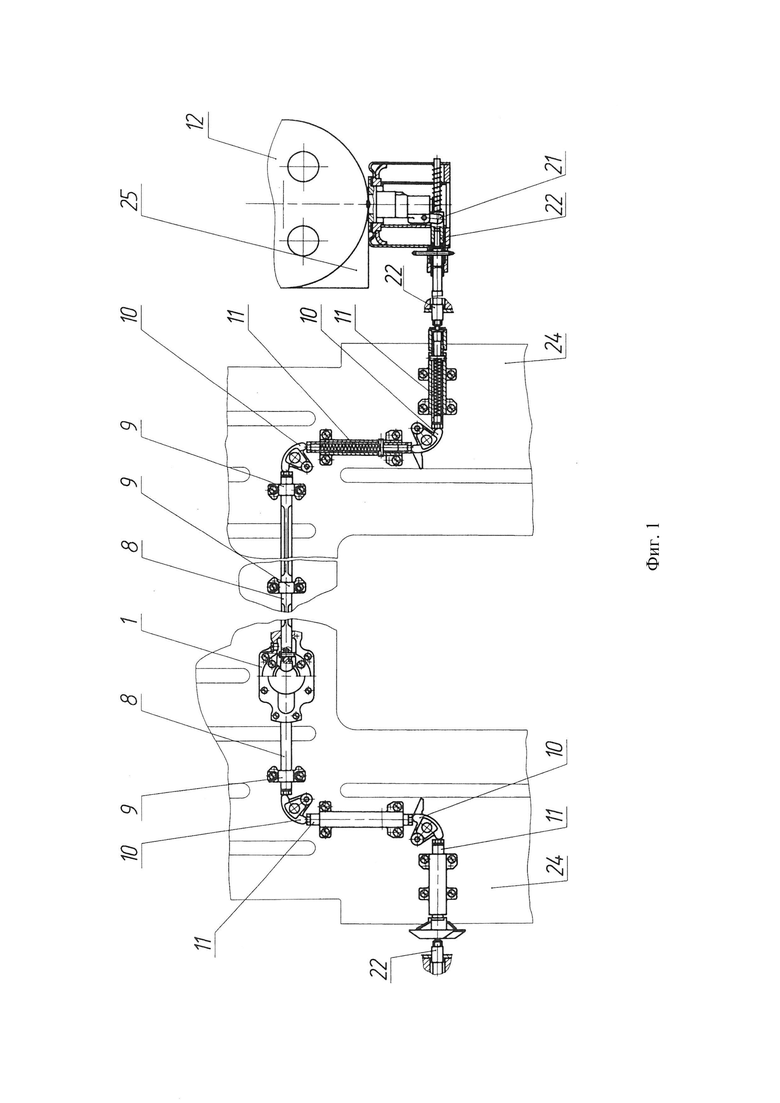
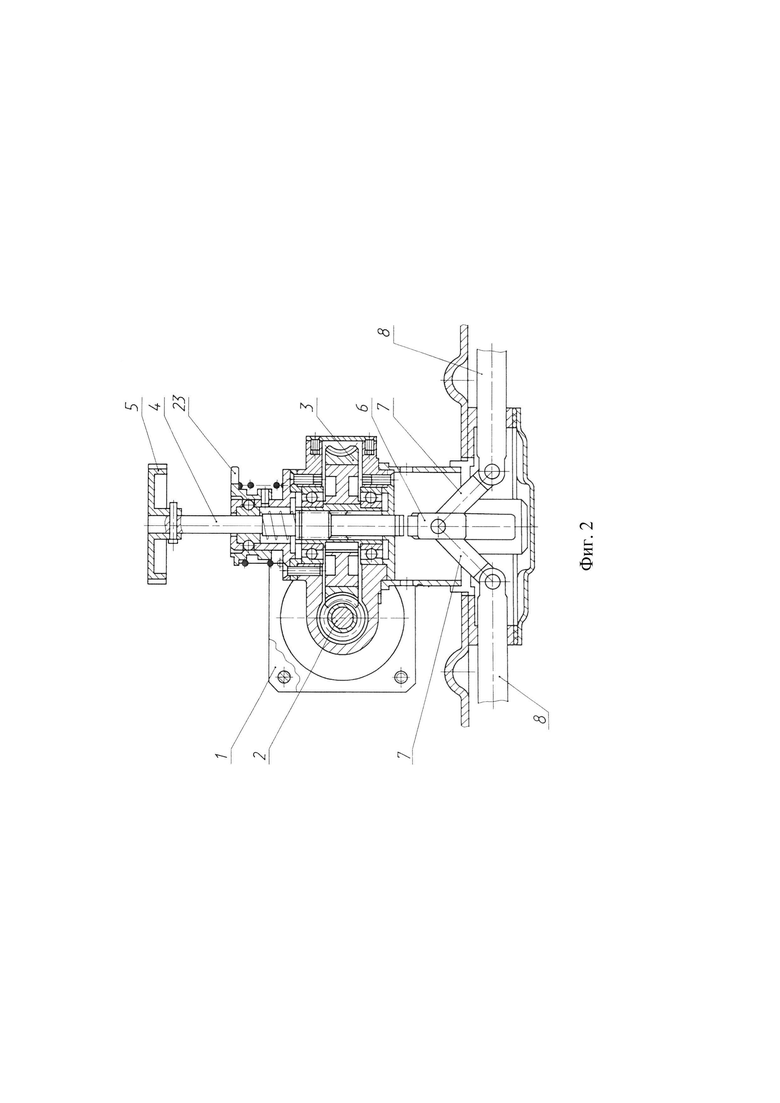
Предложенное техническое решение поясняется графическими материалами, где на фиг. 1 изображен общий вид системы управления спусковыми механизмами пушек комплекса вооружения, на фиг. 2 - конструкция привода системы управления, на фиг. 3 показано взаимодействие элементов системы со спусковым механизмом одной из пушек.
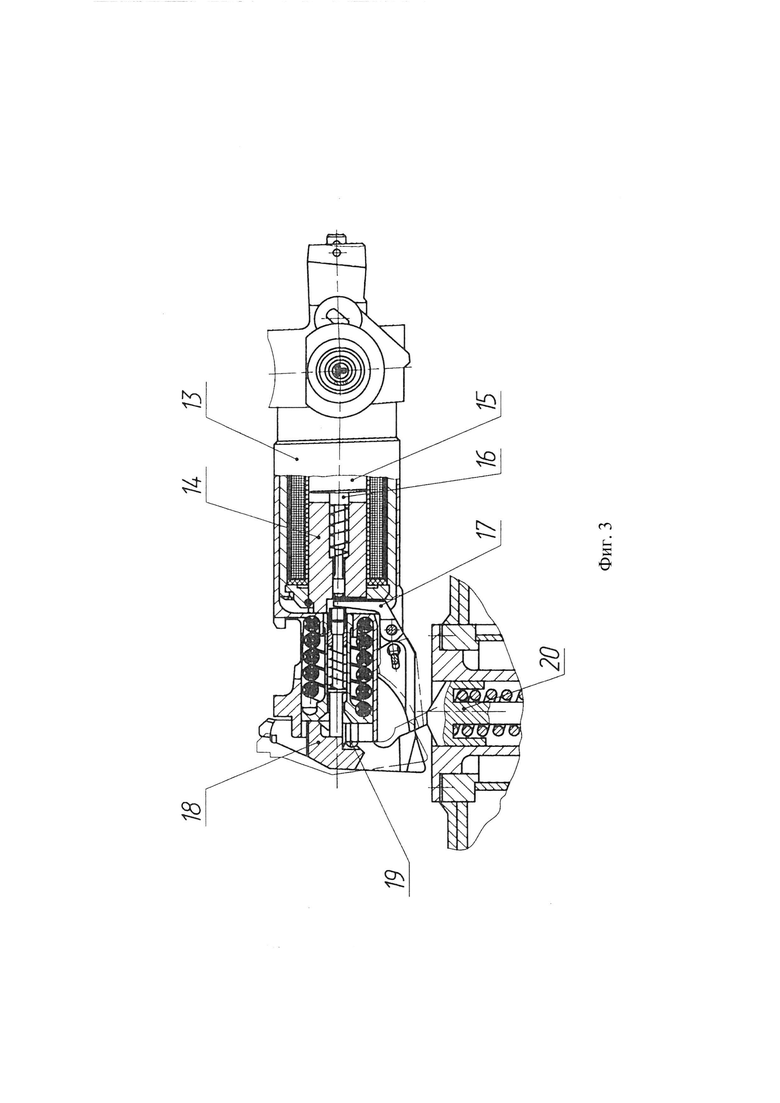
Система управления спусковыми механизмами пушек комплекса вооружения состоит из привода 1, который содержит червяк 2, связанный с червячным колесом 3. Червячное колесо 3 установлено на винте 4 с помощью резьбового соединения. Винт проходит через поводок 23. В верхней части винта 4 закреплен маховик 5. Нижний конец винта 4 имеет возможность взаимодействовать с ползуном 6. На ползуне 6 шарнирно установлены рычаги 7, связанные со стержнями 8, перемещающимися в кронштейнах 9, жестко закрепленных на неподвижных элементах комплекса вооружения. Стержни 8 взаимодействуют с качающейся серьгой 10. Конструкция каждой серьги 10 выполнена из условия обеспечения необходимого направления перемещения подпружиненных толкателей 11. Перечисленные детали и сборочные единицы установлены на неподвижной части 24 комплекса вооружения. На подвижной качающейся части 25 комплекса вооружения установлена пушка 12. В нижней части пушки 12 размещен спусковой механизм 13. Спусковой механизм 13 имеет электромагнит 14 с продольно перемещающимся якорем 15. В торец якоря 15 упирается подпружиненный плунжер 16. В корпусе спускового механизма 13 шарнирно установлено подпружиненное шептало 17. Шептало 17 одним плечом взаимодействует с плунжером 16, а другим удерживает во взведенном положении подпружиненный ударник 18, установленный с возможностью поворота вокруг оси 19.
Под шепталом 17 в качающейся части 25 комплекса вооружения установлен подпружиненный упор 20, взаимодействующий с помощью рычага 21 с подпружиненным толкателем 22.
Система управления работает следующим образом. Поводок 23 находится в положении «АВТОМАТ». Этим обеспечивается фиксация винта 4 от поворота. При вращении червяка 2 поворачивается червячное колесо 3. Винт 4 с помощью резьбы перемещается вниз и воздействует на ползун 6. Ползун 6 двигаясь вниз, разводит рычаги 7, которые перемещают стержни 8. Стержни 8 поворачивают серьги 10, которые воздействуют на подпружиненные толкатели 11. Толкатель 11, установленный в зоне перехода неподвижной части 24 комплекса вооружения к подвижной качающейся части 25, в которой установлена пушка 12, нажимает на подпружиненный толкатель 22. При движении толкателя 22 поворачивается рычаг 21, в результате чего поднимается упор 20. Упор 20 блокирует шептало 17, которое удерживает на боевом взводе подпружиненный ударник 18.
Для осуществления стрельбы червяк 2 поворачивается в противоположном направлении. Винт 4 перемещается вверх и освобождает ползун 6. Под действием пружин толкатели 11, стержни 8 и серьги 10 возвращаются в исходное положение. Толкатель 22 под действием своей пружины перемещается и поворачивает рычаг 21. Рычаг 21 освобождает упор 20. Под действием пружины упор 20 опускается и у шептала 17 появляется возможность прокачивания. При подаче напряжения на электромагнит 14, якорь 15 нажимает на плунжер 16. Плунжер 16 воздействует на шептало 17, которое, поворачиваясь, освобождает подпружиненный ударник 18. Ударник 18 под действием пружины энергично поворачивается и через лодыжку и боек (на чертеже не показаны) воспламеняет капсюль патрона. Происходит выстрел.
Дальнейшее взведение ударника и его поворот для осуществления выстрела происходят под действием затвора пушки (на чертеже не показан).
Для прекращения стрельбы необходимо обесточить электромагнит 14. После снятия напряжения с электромагнита 14, якорь 15 с плунжером 16 под действием пружины возвращаются в исходное положение. Шептало 17 под действием пружины поворачивается и при последующем взведении ударника 18 фиксирует его на боевом взводе. Качающаяся часть комплекса вооружения вместе с пушкой устанавливаются в походное положение. Червяк 2 поворачивает червячное колесо 3, которое опускает винт 4. Дальнейшие действия осуществляются, как описано выше.
При ручном режиме работы поводок 23 переводится в положение «РУЧНОЕ». При этом обеспечивается возможность поворота винта 4 относительно червячного колеса 3. С помощью маховика 5 винт 4 поворачивается относительно неподвижного червячного колеса 3 и воздействует на ползун 6. Дальнейший процесс осуществляется аналогично, как в режиме «АВТОМАТ».
Таким образом, предложенное техническое решение позволило обеспечить дистанционное управление спусковыми механизмами пушек комплекса вооружения в минимальных габаритах и повысить безопасность его работы.
Система управления спусковыми механизмами пушек комплекса вооружения состоит из рукоятки ручного управления, соединенной с приводом, установленным на неподвижной части комплекса вооружения, который посредством рычагов взаимодействует с подпружиненным толкателем с рычагами спуска и который связан со спусковым механизмом пушки, установленной на подвижной части комплекса. Привод выполнен в виде червячного редуктора, на червячном колесе которого установлен винт с поводком, таким образом что его верхняя часть взаимодействует с рукояткой ручного управления, а нижняя часть - с рычагами привода посредством ползуна, при этом каждый рычаг привода шарнирно соединен со стержнем, каждый из которых взаимодействует с подпружиненной тягой, установленной в зоне перехода неподвижной части комплекса к подвижной качающейся части, и которая взаимодействует с подпружиненным толкателем с рычагами спуска, также рычаги спуска закреплены на подпружиненном упоре, который взаимодействует с шепталом спускового механизма пушки. Стержень взаимодействует с подпружиненным толкателем посредством поворотной серьги, установленной на неподвижной части комплекса. Рычаги привода соединены с ползуном посредством шарнира. Технический результат - повышение безопасности комплекса вооружения и уменьшение габаритов системы. 2 з.п. ф-лы, 3 ил.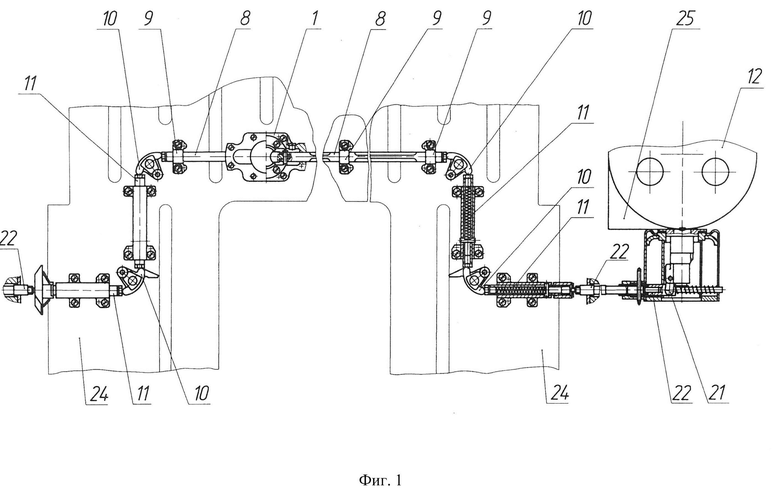
1. Система управления спусковыми механизмами пушек комплекса вооружения, состоящая из рукоятки ручного управления, соединенной с приводом, установленным на неподвижной части комплекса вооружения, который посредством рычагов взаимодействует с подпружиненным толкателем с рычагами спуска и который связан со спусковым механизмом пушки, установленной на подвижной части комплекса, отличающаяся тем, что привод выполнен в виде червячного редуктора, на червячном колесе которого установлен винт с поводком, таким образом что его верхняя часть взаимодействует с рукояткой ручного управления, а нижняя часть - с рычагами привода посредством ползуна, при этом каждый рычаг привода шарнирно соединен со стержнем, каждый из которых взаимодействует с подпружиненной тягой, установленной в зоне перехода неподвижной части комплекса к подвижной качающейся части, и которая взаимодействует с подпружиненным толкателем с рычагами спуска, также рычаги спуска закреплены на подпружиненном упоре, который взаимодействует с шепталом спускового механизма пушки.
2. Система управления спусковыми механизмами пушек комплекса вооружения по п. 1, отличающаяся тем, что стержень взаимодействует с подпружиненным толкателем посредством поворотной серьги, установленной на неподвижной части комплекса.
3. Система управления спусковыми механизмами пушек комплекса вооружения по пп. 1, 2, отличающаяся тем, что рычаги привода соединены с ползуном посредством шарнира.
| ЭЛЕКТРОСПУСКОВОЙ МЕХАНИЗМ | 2008 |
|
RU2367874C1 |
| АВТОМАТИЧЕСКАЯ ПУШКА | 2014 |
|
RU2553502C1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО ВЗВЕДЕНИЯ АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 1993 |
|
RU2102675C1 |
| ПРИВОД РУЧНОГО НАВЕДЕНИЯ ОРУДИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2342621C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| KR 1020180020730 A, 28.02.2018 | |||
| МЕХАНИЗМ ПЕРЕЗАРЯДКИ СТРЕЛКОВОГО ОРУЖИЯ | 2013 |
|
RU2542680C1 |

